Изобретение относится к корабельно-авиационным системам, включающим по меньшей мере левый и правый модульные самолеты-вертолеты, имеющие крылья асимметричной стреловидности, содержащие на каждой их консоли или одном из них соответственно надкрыльные пилоны с их однолопастными несущими винтами (ОНВ) или на правой и левой их законцовках стыковочные узлы, разъемно соединяющие их консоли с верхним обтекателем совместно ими переносимой управляемой ракеты и одновременно отделяемые от нее в полете для ее запуска с последующим их раздельным возвратом на ледокол-носитель, так и подкрыльные фюзеляжи, снабженные комбинированными газотурбинными двигателями со свободными силовыми турбинами, приводящими их ОНВ и/или в кольцевых обтекателях их турбовентиляторы, создающие реактивную тягу с работающими/авторотирующими ОНВ или зафиксированными их лопастями при полете в конфигурации винтокрыла/автожира или самолета.
Известен комплекс для поражения подводных лодок (ПЛ) на больших дальностях, патент RU 2371668 С2, выполненный в виде баллистической ракеты (БР), в носовой части которой под сбрасываемым обтекателем размещена крылатая ракета (КР); БР содержит аэродинамические поверхности с приводами и разгонный двигатель для обеспечения доставки КР на дальность стрельбы к району расположения цели. Для экономичного полета в атмосфере КР состыкована с разгонным двигателем посредством устройства отделения, выполнена с возможностью полета в районе расположения ПЛ-цели и содержит отделяемую боевую часть (БЧ) подводного действия и отделяемый радиогидроакустический буй; система управления КР снабжена аппаратурой для приема информации от радиогидроакустического буя по радиоканалу о местонахождения цели. В соответствии с командами, осуществляющими поиск цели, ее обнаружение, сближение с целью и ее поражение путем подрыва БЧ. После чего БР-носитель продолжает полет с работающим двигателем, уводя ее от места приводнения БЧ подводного действия, чтобы не создавать помех системе ее самонаведения. Сама же одноразовая БР уходила из района приводнения БЧ и самоликвидировалась.
Известен беспилотный самолет проекта "X-plane" компании "Northrop Grumman" (США) [http://test.abovetopsecret.com/forum/thread398541/pg1], выполненный по схеме летающее крыло асимметрично изменяемой стреловидности (КАИС), имеет два турбореактивных двухконтурных двигателя (ТРДД) в мотогондоле с внутренними бомбоотсеками и трехопорным убирающимся колесным шасси. Для сверхзвукового полета "X-plane" его ТРДД General Electric J85-21 имеют реактивную тягу 4485 кгс, что на высоте полета 15 км обеспечивает скорость 1275/1487 км/ч при тяговооруженности 0,54/0,68. Самолеты с КАИС имеют ряд недостатков, основными из которых являются: смещение аэродинамического фокуса при разнонаправленной стреловидности, что приводит к увеличению балансировочного сопротивления; возрастание массы конструкции из-за наличия поворотных шарниров консолей. Кроме того, при большом угле 45° стреловидности консоль с прямой стреловидностью имеет больший эффективный угол атаки, чем консоль с обратной стреловидностью, что приводит к асимметрии лобового сопротивления и, как следствие, к возникновению паразитных разворачивающих моментов по крену, тангажу и рысканию. Более того, для КАИС характерны вдвое больший рост толщины пограничного слоя вдоль размаха, и любой несимметричный срыв потока вызывает интенсивные возмущения, а их устранение достигается путем использования составного крыла из двух асимметричных крыльев.
Наиболее близким к предлагаемому изобретению является [см. http://rbase.new-factoria.ru/missile/wobb/ikara/ikara.shtml] британский противолодочный авиационный комплекс (ПАК) модели "Icara", содержащий авианесущий ледокол (АНЛ) с реактивными беспилотными летательными аппаратами (БЛА), имеющими крыло, фюзеляж с пусковым устройством (ПУ) управляемой ракеты (УР), двигатель силовой установки (СУ) и бортовую систему управления (БСУ).
Признаки, совпадающие - БЛА с габаритами без корабельного ПУ: длина 3,42 м, размах крыльев 1,52 м, высота 1,57 м, несет самонаводящуюся противолодочную торпеду (ПЛТ) типа Mk.44, имеющую при ее массе 196 кг, длине 2,57 м и диаметре 324 мм, скорость 30 узлов и дальность хода 5 км. БЛА с торпедой Mk.44 имеет максимальную/минимальная высоту полета 300/20 м и значительный вес, составляющий 1480 кг, что ограничивает дальность до 24 км и скорость полета до 140…240 м/с.
Причины, препятствующие поставленной задаче: первая - это то, что пуск дозвукового БЛА осуществлялся в направлении, максимально приближающем к цели. Данные о местоположении цели поступали от гидроакустической системы (ГАС) надводного корабля-носителя, другого корабля или противолодочного вертолета. На основании этой информации происходит постоянное обновление данных об оптимальной зоне сброса торпеды в компьютере системы управления стрельбой, который затем в полете передавал их через БСУ на БЛА. По прибытии БЛА в район нахождения цели торпеда Mk.44, полуутопленная с подфюзеляжным ее расположением в корпусе БЛА по радиокоманде отделялась, спускалась на Парашюте, входила в воду и начинала поиск цели. После чего БЛА продолжает полет с работающей СУ, уводя его от места приводнения самонаводящейся ПЛТ, чтобы не создавать помех системе ее самонаведения. Сам же одноразовый БЛА уходил из района и самоликвидировался.
Предлагаемым изобретением решается задача в указанном выше известном ПАК "Icara" увеличения целевой нагрузки и весовой отдачи, исключения механизмов для трансформации ОНВ, уменьшения в походной конфигурации стояночной площади, повышения скорости и дальности полета, обеспечения поражения цели в режиме зависания и возврата с автоматической вертикальной посадкой на палубу АНЛ.
Отличительными признаками предлагаемого изобретения от указанного выше известного британского ПАК модели "Icara", наиболее близкого к нему, являются наличие того, что системам корабельно-авиационная ракетная (СКАР) имеет группу аппаратов вертикального взлета и посадки, включающую более чем два модульных беспилотных самолета-вертолета (МБСВ) с более чем парой модульных пилотируемых самолетов-вертолетов (МПСВ), используемую попарно как одного типа совместно, так и в их комбинации, но и более чем с одной вертолетной площадки упомянутого АНЛ, причем в комбинации двух МБСВ/МПСВ, выполненных с крыльями асимметричной стреловидности (КАС), имеющими как на правой/левой законцовках соответственно левого МБСВ/правого МПСВ их механизмы крепления и расцепления, образующие составное крыло и разъемно соединяющие их консоли с по меньшей мере одним подкрыльным пилоном или верхним обтекателем совместно ими переносимой съемной целевой нагрузки (СЦН) - упомянутой УР и после ее запуска одновременно отделяемые, например, от обтекателя УР в полете или после посадки соответственно с последующим раздельным или совместным их возвратом и автоматической вертикальной их посадкой на палубу упомянутого АНЛ, так и по передней кромке различную стреловидность, образующую при соединении соответствующих консолей КАС, например, с верхним обтекателем упомянутой УР так, что от центра масс последней концевые хорды внешних двух их консолей вынесены вперед или назад либо назад и вперед по полету, образуя от продольной оси упомянутой УР соответственно составное крыло обратной или прямой либо асимметричной стреловидности соответственно с углом χ=-45° или χ=+45° либо χ=±45°, но и две двухвинтовые поперечно-несущие системы (ДПНС), используемые при вертикальном или коротком взлете/посадке (КВП и КВП), включающие одно- или двухлопастные несущие винты (ОНВ или ДНВ) с жестким креплением их лопастей, смонтированные на валах профилированных надкрыльных пилонов каждой консоли КАС составного крыла МБСВ/МПСВ все, например, их ОНВ с профилированными противовесами или левый/правый и правый/левый из всех их ОНВ выполнены соответственно с автоматами или без автоматов и с автоматами их перекоса, возможностью изменения общего и циклического их шага и автоматической установки их лопастей в положение их авторотации, но и свободного их вращения с перекрытием равным a=1,22 при прохождении лопастей одного ОНВ перед втулкой другого так, чтобы наступающие их лопасти на режимах ВВП и зависания проходили над левым и правым бортами каждого подкрыльного фюзеляжа (ПКФ) от кормовой его части к носовой, создавали гармоничное сочетание поперечного и путевого управления при равном удалении в плане осей их вращения от центра масс и продольных осей упомянутой УР и их ПКФ, каждый из последних оснащен более чем одним комбинированным газотурбинным двигателем (КГтД), установленным в кормовой гондоле ПКФ с боковыми его воздухозаборниками и выполнен в виде двухконтурного двигателя, имеющего внешний и внутренний контуры соответственно с однорядным турбовентилятором (ОТВ) в кольцевом обтекателе и более чем одной свободной силовой турбиной (ССТ), передающей взлетную мощность, например, четырехдвигательной СУ посредством системы трансмиссии на соответствующие ОНВ в удвоенной ДПНС-Х2 и/или на соответствующие ОТВ, создающие, например, в удвоенной пропульсивно-реактивной системе (ПРС-R2) синхронную тягу при выполнении ВВП и КВП или горизонтальном полете, но и соединенные МБСВ/МПСВ выполнены с возможностью преобразования полетной их конфигурации после образования их Двумя КАС составного крыла и выполнения вертикального или короткого взлета при нормальном или максимальном взлетном весе соответственно с четырехвинтового вертолета или винтокрыла с удвоенными ДПНС-Х2 и ПРС-R2 в реактивный крылатый автожир с авторотирующими ОНВ или самолет с зафиксированными их противовесами и лопастями, размещенными в плане параллельно продольным осям и ПФК, и упомянутой УР соответственно как вперед и назад по полету, так и остановлены при флюгерном положении или нулевом угле установки их лопастей, которые закреплены соответственно вертикально или горизонтально параллельно плоскости симметрии МБСВ/МПСВ с их прямыми КАС, образующими, например, составное КАС с противоположно направленной стреловидностью χ=±45°, имеющее общий размах, определяемый из соотношения: LОР=RОНВ×a×4,34×cosχ=45°, м (где: RОНВ - радиус ОНВ, а - величина перекрытия ОНВ, χ - стреловидность КАС) и большое его удлинение λ=8,0, но и обратно.
Кроме того, в упомянутых МБСВ/МПСВ и кормовых их гондолах каждый ее КГтД содержит между упомянутыми ОТВ и ССТ и соосно с двумя последними Т-образный в плане осевой редуктор, имеющий продольный по его оси входной вал, например, от одной ССТ и выходные продольный и поперечный валы, первый из которых передает мощность через муфту сцепления на ОТВ, а второй - на Т-образный в плане главный редуктор, продольный вал которого вращательно связан с угловым фюзеляжным редуктором, вертикальная колонка которого, являясь жесткой осью поворотного шарнира круговой опоры их КАС, размещена соосно с последним, имеет выходной вал, связанный через муфту сцепления с Т-образным при виде сзади крыльевым редуктором, передающим выходными его валами равновеликую мощность на угловые редукторы их ОНВ, а в их ПКФ упомянутые боковые воздухозаборники, не имеющие пластинчатого отсекателя пограничного слоя и внутренних подвижных регулирующих элементов, выполнены и для экранирования лопаток ОТВ их упомянутых КГтД, и отведения пограничного слоя, и повышения коэффициента восстановления полного давления как без щели для слива пограничного слоя, но и каждый включает рампу, сжимающую поток и формирующую коническое его течение, а на режимах их ВВП и зависания с составным их КАС продольное управление осуществляется посредством изменения шага пары задних ОНВ в МБСВ и пары передних ОНВ в МПСВ, поперечное управление - изменением шага в группе внешних ОНВ МБСВ и МПСВ соответственно левого ОНВ и правого ОНВ, путевое управление - изменением крутящих моментов в расположенных вдоль его размаха парных группах ОНВ, вращающихся при виде сверху в одном направлении, например, внешний ОНВ МБСВ с внутренним МПСВ ОНВ и внутренний ОНВ МБСВ с внешним ОНВ МПСВ соответственно против часовой и по часовой стрелки, при этом упомянутые МБСВ/МПСВ с составным КАС на режимах их ВВП и зависания при удельной нагрузке на мощность комбинированной их СУ, составляющей ρN=1,92 кг/л.с., каждая упомянутая ССТ выполнена с элементами цифрового программного управления, сочетающего систему адаптивного управления формированием безопасного полета (УФБП) при удельной вертикальной тяговооруженности в упомянутой удвоенной ДПНС-Х2, составляющей с учетом потерь от обдува двух ПКФ и составного КАС ρВТ=1,85, включает режимы работы ССТ как взлетный, так и чрезвычайный режим (BP и ЧР) при отборе потребной ее мощности на привод упомянутых ОНВ соответственно как от двух работающих ССТ, так и от одной из работающих ССТ с автоматическим выравниванием и равным перераспределением оставшейся мощности между ОНВ при отказе соответствующей ССТ в КГтД, например, даже в последнем случае после автоматического включения ЧР работы оставшейся в работе ССТ, которая при удельной вертикальной тяговооруженности в упомянутой удвоенной ДПНС-Х2, составляющей ρВТ=1,07, обеспечит режим аварийной вертикальной посадки в течение 2,5 минут, а в каждой их ССТ система УФБП содержит: один или несколько датчиков, которые сконфигурированы для выявления данных, касающихся расхода воздуха (GB, кг/с) через компрессор ССТ, температуры газов (ТГ, К) перед турбиной ССТ, суммарной степени сжатия (К) компрессора, а также один или несколько датчиков, которые сконфигурированы для обнаружения относительного положения ПКФ и дисков вращения ОНВ для относительного их положения относительно уровня земли или поверхности посадочной площадки, а также различных препятствий на пути следящего управляемого его снижения; компьютер управления полетом, расположенный в их БСУ и находящийся в рабочем состоянии с одним или несколькими датчиками, компьютер управления полетом сконфигурирован чтобы: определить относительную позицию между их ПКФ с колесным шасси й уровнем земли или поверхностью посадочной площадки; сравнить относительную позицию их ПКФ и несущей их системы с выбранной относительной их позицией; определить скорость автоматического снижения, необходимую для их перемещения в выбранное относительное положение; преобразовать скорость следящего устройства во входы управления полетом; а также обеспечить автоматическое безопасное снижение в выбранное относительное положение через входы управления полетом, а их компьютер управления полетом выполнен как с дополнительным компьютером суммирования данных датчиков, так и с возможностью преобразования данных с каждого датчика в относительное положение, которое определяет на основе глобального положения, причем в упомянутых МБСВ/МПСВ их КГтД для управления вектором тяги (УВТ) выполнены с прямоугольными плоскими соплами, отклоняющимися для продольного или поперечного управления соответственно синфазно или дифференциально вверх-вниз на угол ±15°, и термопоглощающим покрытием, уменьшая инфракрасное (ИК) излучение и их радиолокационную заметность, а левый их ПКФ между упомянутых КГтД оснащен вынесенным вдоль продольной его оси кормовым обтекателем с отсеком, имеющим на его конце выдвижную буксируемую на тросе ложную цель, а их планер выполнен из алюминиево-литиевых сплавов и композиционных материалов по малозаметной технологии с радиопоглощающим покрытием, при этом каждый малозаметный МБСВ/МПСВ выполнен соответственно без/с кабиной пилотов, снабженной внутри видеокамерами с автономными манипуляторами, подключаемыми к органам управления МПСВ и возможностью опционального его управления пилотами из двухместной кабины, имеющей катапультируемые в верхнюю полусферу кресла, смонтированные бок о бок, срабатывающие на режимах выполнения ВВП и зависания автоматически после отстрела пиропатронами лопастей ОНВ при аварийной ситуации, а их БСУ оснащена электродистанционной системой управления, реагирующей по меньшей мере на одну из систем автономного управления полетом, дистанционного управления оператором, управления из кабины пилотов и/или их комбинации, а каждый их ПКФ имеет от пирамидальной носовой их части скошенные по всей их длине боковые стороны, образующие с упомянутыми воздухозаборниками при виде спереди пяти- или шестигранное поперечное сечение, уменьшающее эффективную площадь рассеивания, но и радиолокационную и визуальную заметность, причем соединенные МБСВ/МПСВ, несущие под упомянутыми пилонами составного их КАС две стратегические крылатые ракеты (СКР) типа Х-555, образующие после их запуска автономные рои СКР с буксируемыми ложными их целями, использующие маловысотный профиль их полета и систему их самообороны - станцию активных электронных помех, повышают дальность их действия до 6407/9295 км, используя технологию ВВП/КВВП соответственно, и поражающую возможность, создают безопасную авиазону между АНЛ и ПВО цели, а их ПКФ для внутреннего вооружения имеют одно- и двухстворчатые соответственно боковые и нижние отсеки, ПУ которых с закрепленными на них УР воздух-воздух типа Р-77 и Р-37М смонтированы на внутренних сторонах створок и внутри отсеков соответственно, а комплекс их вооружения имеет авиационные пушки, встроенные в обтекателе нижней носовой части каждого ПФГ, поражающие дозвуковые ударные БЛА и СКР, при этом тяжеловооруженные соединенные МБСВ/МПСВ, несущие под пилоном составного их КАС гиперзвуковую противокорабельную ракету (ПКР) Х-47М2 «Кинжал», обеспечивают ее управляемый запуск на сверхзвуковой скорости и высоте 15 км и позволят достичь дальности ее полета до 2160/3570 км, используя технологии ВВП/КВВП, соответственно, а каждый их ПКФ имеет на их концах цельно-поворотные кили, отклоненные вниз под углом 43° к горизонтали и наружу от плоскости симметрии МБСВ/МПСВ, а каждое их КАС имеет треугольные в плане законцовки с внешними их сторонами, размещенными параллельно их оси симметрии, и крепится к круговой опоре, интегрированной с его S-образным в плане обтекателем и обеспечивающей после отключения крыльевого редуктора от трансмиссии поворот КАС в горизонтальной плоскости с размещением правой и левой консолей соответственно над носовой и кормовой частями их ПКФ, которые фиксируются вдоль оси последнего при их раздельном размещении в ангаре упомянутого АНЛ с установленными во флюгерное положение лопастями их ОНВ, складывающимися к их центру масс, и на равнее со сложенными их килями вниз уменьшают в 6,4…6,6 раза стояночную их площадь от взлетной, причем электронно-оптический датчик (ЭОД), предназначенный для обнаружения и идентификации цели, имеет приемную часть ЭОД, которая закрывается сверху сапфировым стеклом, устанавливается перед кабиной МПСВ сверху носовой части правого ПКФ и с радаром последнего обеспечивает на больших, безопасных расстояниях целеуказание и управление оружейными нагрузками и своими, и МБСВ с наведением на цель УР воздух-воздух и ПКР, СКР воздух-поверхность, но и его использования в составе авиагруппы в качестве головного МПСВ, например, с парой предыдущих и более чем парой из последующих ведомых, при этом каждый сенсорный компьютер предыдущих и последующих из ведомых МБСВ, сконфигурированные для восприятия акустических сигналов, имеет память, содержащую: данные, представляющие по меньшей мере одну траекторию полета головного МПСВ и предыдущих МБСВ; данные, представляющие как минимум один профиль их совместного полета; программные инструкции, выполняемые процессором, для расчета их группового полета, чтобы исполнить по меньшей мере текущий маршрут полета и по меньшей мере его профиль полета, и сохранять текущий полет в памяти; программные инструкции, выполняемые процессором для полета МБСВ в соответствии с текущим профилем полета; мультимодальная логика, выполняемая процессором для вычисления способности динамически адаптироваться к изменяющимся условиям или параметрам, включая способность к координации авиагруппы, распределенному тактическому управлению, распределенным по целям авиагруппы и/или полностью, повышая эффективность ее атаки, интегрированы к автономному стратегическому роению, причем соединенные МБСВ/МПСВ, несущие в их ПКФ по 2\2 штук ПКР\УР типа X-38M\P-77 и под пилоном составного их КАС упомянутую СЦН-топливный бак, позволит, используя его топливо, долететь каждой их паре в авиагруппе до надводной цели, затем, разделяясь и атакуя ее роем, повысить поражающую возможность и дальность полета ПКР с 40 км до 1830 км, при этом упомянутый АНЛ имеющий асимметричный корпус, выполнен с двухосадочной его схемой, позволяющей использовать осадку в диапазоне от 8,5 до 10,5 м для увеличения ледопроходимости и выполнения специальных задач на мелководье и устье рек, снабженный движительным комплексом, состоящим из пары основных и пары дополнительных соответственно кормовых и носовых винто-рулевых колонок (ВРК), каждая из которых, работая независимо и повышая эффективность маневрирования в любом направлении и даже вращения на месте, может как поворачиваться в горизонтальной плоскости на 360°, так и оснащена встроенным высокомоментным электродвигателем постоянного тока с соответствующим гребным винтом фиксированного шага (ВФШ), смонтированным непосредственно на валу внутри гондолы полноповоротной ВРК, причем установка носовых ВРК на упомянутом АНЛ обеспечивает высокую маневренность в ледовых условиях, но и на чистой воде, что очень важно в зонах с ограниченным водным пространством, но и, достигая эффекта размывания льда работой этих ВФШ как снижает прочность льда и повышает способность прохождения торосов, так и оказывает вредное воздействие на работу кормовых ВРК, при этом для повышения эффективности пропульсивной установки упомянутого АНЛ пара носовых ВРК, которые, обеспечивая эффект расхождения векторов их тяги от продольной оси АНЛ, развернуты под углом друг к другу на эффективный упор АНЛ в режиме создания тягового усилия, причем пропульсивная установка с четырьмя ВРК и четырьмя джойстиками управления объединены в одном мостике с установкой двух навигационных мостиков - основного и дублирующего для управления АНЛ во время хода и визуального контроля, улучшающего со второго мостика панорамный обзор при его движении косым ходом.
Кроме того, для транс- либо сверхзвукового режима полета упомянутых соединенных МБСВ/МПСВ, достигая маршевой тяговоуроженности первого уровня - 0,23 или второго - 0,28 либо третьего уровня - 0,44 или четвертого - 0,54, используется соответственно 27% или 36% либо 72% или 100% мощности их СУ на высоте 15 км с упомянутым составным КАС обеспечивается скорость 0,8 Маха (М) или М=0,894 либо транс- или сверхзвуковая скорость М=0,992 или М=1,11 соответственно, а каждый их КГтД снабжен его реактивным соплом с форсажной камерой, используемой на самолетных взлетных и сверхзвуковых режимах полета с передними перед упомянутым ОТВ и задними перед форсажной камерой открытыми управляемыми створками упомянутой гондолы для дополнительного в нее подвода воздуха, что позволит при нормальном/максимальном взлетном их весе на высоте 15 км повысить тяговоуроженность их СУ с 0,54/0,47 до 0,78/0,68 и увеличить скорость с М=1,09/М=0,992 до М=1,2/М=1,09 соответственно, при этом отсутствие застекления лобовых окон или всех окон в кабине пилотов МПСВ позволит увеличить жесткость ПКФ и снизить толщину обшивки и, как следствие, уменьшить ее массу, причем планер МПСВ с герметичной кабиной, имеющей автоматически сбрасываемый непрозрачный бронефонарь для катапультирования пилотов и средства отображения цифрового изображения, представляющего часть внешней сцены, включающей окружающую среду, простирающуюся вперед и достаточную для пилотирования, оснащен множеством видеокамер, ИК-датчиков и видеодатчиков, обеспечивающих сенсорную съемку, фиксирующими в передней и задней полусферах все события на 360°, при этом для управления МПСВ в режиме реального времени изображение проходит цифровую корректировку и отображается модулем распределения видео на дисплеях кабины пилотов, делая ее обшивку или прозрачной, или видны на нашлемных дисплеях пилотов, которые, образуя общие окна просмотра, подключены к первому и второму процессорам расширенной системы зрения, сконфигурированы для ношения первым и вторым пилотом соответственно, причем первое и второе общие окна просмотра и выделенные отображенные линии визирования видны на первом и втором нашлемных дисплеях пилотов соответственно.
Благодаря наличию этих признаков, которые позволят освоить ударно-стратегическую СКАР, имеющую группу аппаратов вертикального взлета и посадки, включающую более чем два модульных беспилотных самолета-вертолета (МБСВ) с более чем парой модульных пилотируемых самолетов-вертолетов (МПСВ), используемую попарно как одного типа совместно, так и в их комбинации, но и более чем с одной вертолетной площадки упомянутого АНЛ, причем в комбинации двух МБСВ/МПСВ, выполненных с крыльями асимметричной стреловидности (КАС), имеющими как на правой/левой законцовках соответственно левого МБСВ/правого МПСВ их механизмы крепления и расцепления, образующие составное крыло и разъемно соединяющие их консоли с по меньшей мере одним подкрыльным пилоном или верхним обтекателем совместно ими переносимой съемной целевой нагрузки (СЦН) - упомянутой УР и после ее запуска одновременно отделяемые, например, от обтекателя УР в полете или после посадки соответственно с последующим раздельным или совместным их возвратом и автоматической вертикальной их посадкой на палубу упомянутого АНЛ, так и по передней кромке различную стреловидность, образующую при соединении соответствующих консолей КАС, например, с верхним обтекателем упомянутой УР так, что от центра масс последней концевые хорды внешних двух их консолей вынесены вперед или назад либо назад и вперед по полету, образуя от продольной оси упомянутой УР соответственно составное крыло обратной или прямой либо асимметричной стреловидности соответственно с углом χ=-45° или χ=+45° либо χ=±45°, но и две двухвинтовые поперечно-несущие системы (ДПНС), используемые при вертикальном или коротком взлете/посадке (КВП и КВП), включающие одно- или двухлопастные несущие винты (ОНВ или ДНВ) с жестким креплением их лопастей, смонтированные на валах профилированных надкрыльных пилонов каждой консоли КАС составного крыла МБСВ/МПСВ все, например, их ОНВ с профилированными противовесами или левый/правый и правый/левый из всех их ОНВ выполнены соответственно с автоматами или без автоматов и с автоматами их перекоса, возможностью изменения общего и циклического их шага и автоматической установки их лопастей в положение их авторотации, но и свободного их вращения с перекрытием равным a=1,22 при прохождении лопастей одного ОНВ перед втулкой другого так, чтобы наступающие их лопасти на режимах ВВП и зависания проходили над левым и правым бортами каждого подкрыльного фюзеляжа (ПКФ) от кормовой его части к носовой, создавали гармоничное сочетание поперечного и путевого управления при равном удалении в плане осей их вращения от центра масс и продольных осей упомянутой УР и их ПКФ, каждый из последних оснащен более чем одним комбинированным газотурбинным двигателем (КГтД), установленным в кормовой гондоле ПКФ с боковыми его воздухозаборниками и выполнен в виде двухконтурного двигателя, имеющего внешний и внутренний контуры соответственно с однорядным турбовентилятором (ОТВ) в кольцевом обтекателе и более чем одной свободной силовой турбиной (ССТ), передающей взлетную мощность, например, четырехдвигательной СУ посредством системы трансмиссии на соответствующие ОНВ в удвоенной ДПНС-Х2 и/или на соответствующие ОТВ, создающие, например, в удвоенной пропульсивно-реактивной системе (ПРС-R2) синхронную тягу при выполнении ВВП и КВП или горизонтальном полете, но и соединенные МБСВ/МПСВ выполнены с возможностью преобразования полетной их конфигурации после образования их двумя КАС составного крыла и выполнения вертикального или короткого взлета при нормальном или максимальном взлетном весе соответственно с четырехвинтового вертолета или винтокрыла с удвоенными ДПНС-Х2 и ПРС-R2 в реактивный крылатый автожир с авторотирующими ОНВ или самолет с зафиксированными их противовесами и лопастями, размещенными в плане параллельно продольным осям и ПФК, и упомянутой УР соответственно как вперед и назад по полету, так и остановлены при флюгерном положении или нулевом угле установки их лопастей, которые закреплены соответственно вертикально или горизонтально параллельно плоскости симметрии МБСВ/МПСВ с их прямыми КАС, образующими, например, составное КАС с противоположно направленной стреловидностью χ=±45°, имеющее общий размах, определяемый из соотношения: LОР=RОHB×a×4,34×cosχ=45°, м (где: RОНВ - радиус ОНВ, а - величина перекрытия ОНВ, χ - стреловидность КАС) и большое его удлинение λ=8,0, но и обратно. Все это позволит в арктической СКАР с соединенными МБСВ/МПСВ, имеющими КАС с двумя ПКФ, упростить их управляемость и обеспечить ее стабильность. В случае отказа одной из ССТ на режимах ВВП в их СУ ее КГтД выполнены с автоматическим выравниванием и равным перераспределением при этом оставшейся мощности ССТ между ОНВ, что повышает безопасность. Составное КАС с разнонаправленной χ=±45° стреловидностью обеспечит на режимах полета автожира/самолета скорости 750/950…1020 км/ч, а на сверхзвуковой скорости M=1,2…M=1,3 уменьшит волновое сопротивление в 2,8 раза в сравнении со стреловидным крылом χ=+45° (см. патент US 3737121 A, NASA).
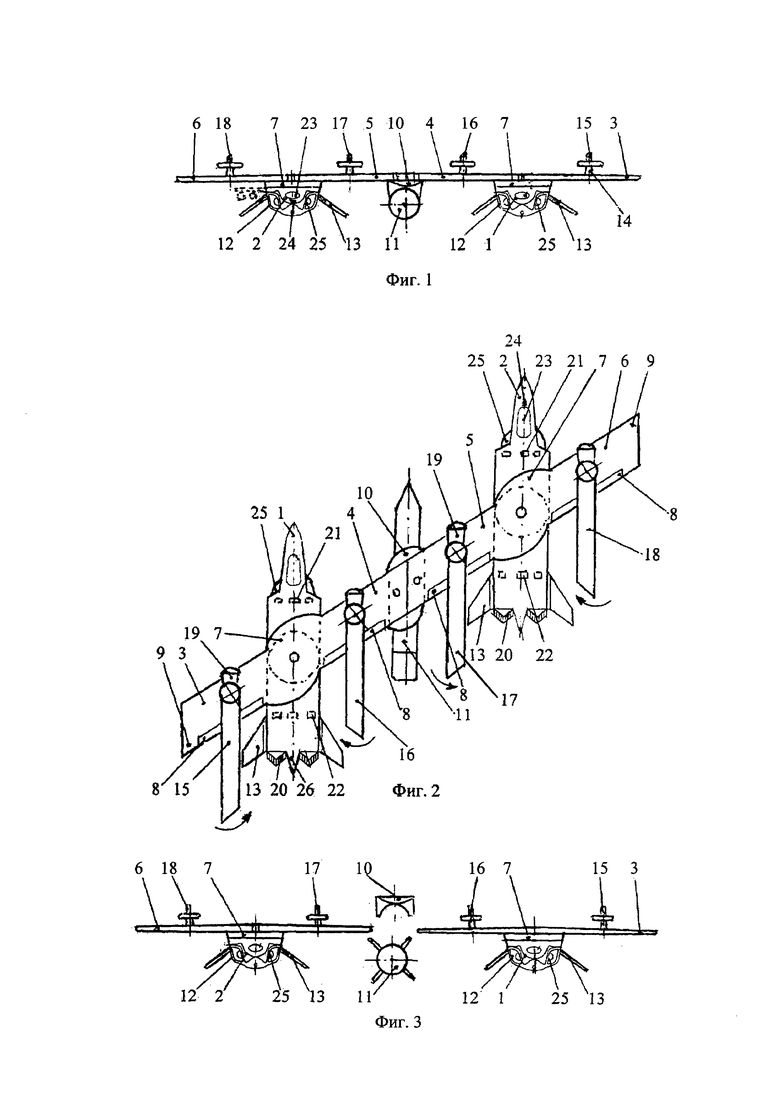
Предлагаемое изобретение ударно-стратегической СКАР с палубными соединенными МБСВ/МПСВ, имеющими в предпочтительном варианте прямое составное КАС со стреловидностью χ=±45°, правая/левая консоли которых состыкованы с верхним обтекателем гиперзвуковой ПКР типа Х-47М2 «Кинжал», два ПКФ с их КГтД, имеющими плоские сопла с УВТ и приводящими четыре ОНВ и/или четыре ОТВ, иллюстрируется на общих видах спереди/сверху и спереди соответственно фиг. 1/2 и фиг. 3:
фиг. 1/2 в конфигурации самолета/вертолета с КГтД, приводящими для создания горизонтальной тяги четыре ОТВ/вертикальной тяги четыре ОНВ соответственно на режимах скоростного полета с зафиксированными лопастями, размещенными параллельно оси симметрии/работающими ОНВ при ВВП и зависании с двумя ПКФ, правый из них показан с боковой створкой условно пунктиром с ПУ УР воздух-воздух;
фиг. 3 в конфигурации двух самолетов, отделяемых в полете от обтекателя УР после ее запуска, для раздельного возврата МБСВ/МПСВ и автоматической вертикальной посадки на палубу АНЛ каждого из них как вертолета с ДПНС-Х2 и двумя его ОНВ с автоматами перекоса, изменяющими продольно-поперечную балансировку.
Арктическая СКАР с соединенными МБСВ/МПСВ, выполненными с планером из алюминиевых сплавов и композитного углепластика и удвоенными ДПНС-Х2 с ПРС-R2, представлена на фиг. 1-3 левым МБСВ с ПКФ 1/правым МПСВ с ПКФ 2, имеющим левую 3 и правую 4 консоли КАС 3-4/левую 5 и правую 6 консоли КАС 5-6 с их стреловидностью χ=+45° и χ=-45° соответственно, которые крепятся на поворотной круговой опоре их обтекателя 7, снабжены по всему размаху закрылками 8 и треугольными в плане законцовками 9 с внешними их сторонами, размещенными параллельно оси симметрии. Консоли 3/5 прямых КАС 3-4/КАС 5-6 имеют механизмы крепления и расцепления (на фиг.1-3 не показано), образующие составное КАС 3-4/5-6 и разъемно соединяющие их консоли с верхним обтекателем 10 совместно ими переносимой УР 11, но и одновременно отделяемые от нее в полете для ее запуска с последующим раздельным возвратом и автоматической вертикальной их посадкой на палубу АНЛ. Левый 1/правый 2 ПКФ с боковыми воздухозаборниками 12 имеют на их концах цельно-поворотные кили 13, отклоненные вниз под углом 43° к горизонтали и наружу от плоскости симметрии. На консолях составного КАС 3-4/5-6 смонтированы надкрыльные профилированные пилоны 14 с валами (на фиг. 1-3 не показано) двух их задних 15-16 ОНВ/двух их передних 17-18 ОНВ с их противовесами 19, которые при выполнении ВВП вращаются над их консолями и ПКФ 1/2 и при горизонтальном полете их лопасти фиксируются параллельно оси симметрии (см. фиг. 1). Каждый ПКФ 1/2 снабжен передней и задними главными стойками с колесами трехопорного шасси, убирающегося вперед по полету в соответствующие их отсеки, и содержит в кормовых гондолах (на фиг. 1-3 не показано) их КГтД, каждый из которых имеет внешний и внутренний контуры соответственно с ОТВ в ПРС-R2 и ССТ, выполнен с передним выводом вала для отбора мощности от ССТ и возможностью передачи мощности от нее на главный редуктор (на фиг. 1-3 не показаны), который перераспределяет 50% и 50%, но и 72% и 100% от взлетной мощности комбинированной СУ соответственно при выполнении ВВП и зависания между двумя парами угловых редукторов ОНВ 15-16/ОНВ 17-18 в удвоенной ДПНС-Х2, но и при сверхзвуковом полете на ОТВ от ССТ. Четыре КГтД с их ОТВ и ССТ имеют прямоугольные плоские сопла 20 с УВТ и передние 21, и задние 22 управляемые створки их кормовых гондол в каждом ПКФ 1/2 для дополнительного в них подвода воздуха на форсажных режимах работы КГтД.
Управление соединенными МБСВ/МПСВ обеспечивается общим, дифференциальным и циклическим изменением шага ОНВ 15-18 и ОНВ 16-17, отклонением цельно-поворотных килей 13 и сопел 20 с УВТ. При горизотальном полете в конфигурации реактивного автожира или самолета подъемная сила создается соответственно авторотирующими ОНВ 15-18 с составным КАС 3-4/5-6 или составным КАС 3-4/5-6 (см. фиг. 1), маршевая реактивная тяга - системой ПРС-R4 через реактивные сопла 20 в КГтД, смонтированных в ПКФ 1/2, на режиме перехода - составным КАС 3-4/5-6 с ОНВ 15-18. После создания подъемной тяги ОНВ 15-18, выполненными с жестким креплением лопастей, обеспечиваются режимы ВВП или КВП при создании реактивными соплами 20 в КГтД требуемой маршевой тяги для поступательного полета (см. фиг.2). При выполнении ВВП и зависания изменение балансировки по тангажу и крену обеспечивается изменением соответствующего циклического шага посредством автомата перекоса ОНВ 15-18, а путевое управление - изменением крутящих моментов в группах ОНВ, расположенных вдоль размаха КАС 3-4/5-6, вращающихся в одном направлении ОНВ 15-17 и ОНВ 16-18 соответственно против часовой и по часовой стрелки (см. фиг. 2). После вертикального взлета и набора высоты выполняется разгонный полет на скоростях более 300…350 км/ч и уменьшаются обороты вращения ОНВ 15-18. По Мере разгона с ростом подъемной силы составного КАС 3-4/5-6 подъемная сила ОНВ 15-18 уменьшается. При достижении скорости до 400…450 км/ч и для перехода на самолетный режим полета лопасти ОНВ 15-18 синхронно фиксируются параллельно оси симметрии (см. фиг. 2). При транс- или сверхзвуковом полете МБСВ/МПСВ изменение балансировки по курсу и тангажу или крену обеспечивается отклонением соответственно асинхронным килей 13 и синхронным или дифференциальным сопел 20 с УВТ на ПКФ 1 и 2. БСУ МПСВ обеспечивает как опциональное его управления пилотами из правой двухместной кабины 23 без застекления ее окон, так и целеуказание - радаром с АФАР и ЭОД 24, которые смонтированы на правом ПКФ 2. Составное КАС 3-4/5-6 соединяется с верхним обтекателем 10, который крепится с возможностью его автоматического отделения и сброса от верхней поверхности, например, гиперзвуковой ПКР 11 типа Х-47М2 «Кинжал» после ее запуска (см. фиг. 3). Каждый боковой воздухозаборник 12 его КГтД выполнен без пластинчатого отсекателя пограничного слоя и имеет коническое тело 25, сжимающее поток и формирующее коническое его течение, но и экранирующее ОТВ в КГтД. Левый ПКФ 1 МБСВ между плоских сопел 20 с УВТ имеет кормовой обтекатель 26 с отсеком, снабженным на его конце выдвижной буксируемой на тросе ложной целью.
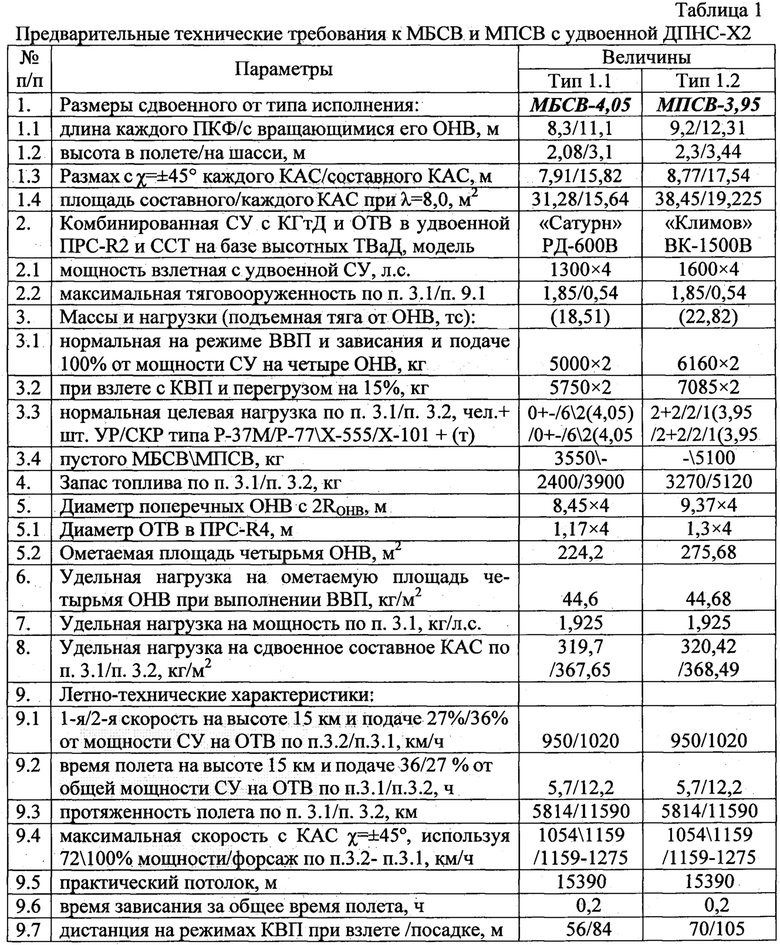
Таким образом, ударно-стратегическая СКАР с соединенными МБСВ/МПСВ, имеющими КГтД, приводящими для создания вертикальной тяги ОНВ или горизонтальной тяги ОТВ с работающими ОНВ или зафиксированными их лопастями, представляют собой модульные конвертопланы, преобразующие полетную их конфигурацию только изменением условий работы ОНВ. Составное их КАС со стреловидностью χ=±45° увеличивает показатели аэродинамических и структурных преимуществ, особенно, на сверхзвуковых скоростях М=1,2. Система синхронизации каскада ССТ в их КГтД оснащена последовательно соединенными блоком приведения давления в компрессоре их ССТ, блоком формирования заданного значения частоты вращения и углового положения лопаток их ССТ и исполнительными органами, которые обеспечивают заданный расход топлива, формирующий требуемую мощность, и корректируют угловое рассогласование лопаток в каскаде ССТ, исключающее механическую синхронизацию сдвоенных ДПНС-Х2. Арктическая СКАР с палубными соединенными (см. табл. 1) МБСВ-4,05/МПСВ-3,95, несущими в ПКФ по -\6/2\2 шт. УР типа Р-37М\Р-77 и под составным КАС по 2/1 СКР типа Х-555/Х-102, позволяющими при использовании складывающихся на стоянке КАС и килей повысить в 2 раза раздельную их вместимость на АНЛ, но и четвертого уровня так называемого manned and unmanned teaming (MUM-T) получать пилотам МПСВ не только реальные сенсорные изображения с ведомых МБСВ, а также управлять оружейными нагрузками, их навигацией и глобальным позиционированием с созданием безопасной авиазоны между ПВО цели и АНЛ.
Соединенным МБСВ/МПСВ, несущим в их ПКФ по 2\2 шт. ПКР\УР типа Х-38М\Р-77 и под составным КАС подвесной топливный бак, позволит, используя его топливо, долететь нескольким их парам до надводной цели, затем, разделяясь и атакуя ее роем, улучшить успешность выполнения противокорабельной операции. Возможное освоение на базе соединенных МПСВ-3,95 тяжеловооруженных МБСВ-5, несущих гиперзвуковую ПКР Х-47М2 «Кинжал» или противоспутниковую ракету 95М6 «Контакт», обеспечивающих их управляемый запуск на сверхзвуковой скорости и высоте 15 км, позволит дальность их полета увеличить до 2160/3570 км или 1970/3260 км, используя технологии ВВП/КВВП, соответственно. Атомный АНЛ, освоенный на платформе двухосадочной схемы ледокола проекта 22220, обеспечит применение ударно-стратегической СКАР с устья рек Сибири. Что позволит повысить скрытность и боевую ее устойчивость, а также поражающую возможность в Северных морских регионах кораблей-носителей системы ПРО «Иджис» и недосягаемость от подлодок противника, но и исключить наличие в Заполярье дорогостоящих аэродромов дальней авиации.
| название | год | авторы | номер документа |
|---|---|---|---|
| МОДУЛЬНЫЕ САМОЛЕТЫ-ВЕРТОЛЕТЫ ДЛЯ КОМПЛЕКСОВ АРКТИЧЕСКИХ РАКЕТНО-АВИАЦИОННЫХ | 2020 |
|
RU2743311C1 |
| МОДУЛЬНЫЕ САМОЛЕТЫ-ВЕРТОЛЕТЫ ДЛЯ КОРАБЕЛЬНЫХ АВИАЦИОННО-РАКЕТНЫХ СИСТЕМ | 2020 |
|
RU2750586C1 |
| ОКЕАНИЧЕСКАЯ СИСТЕМА КОРАБЕЛЬНО-АВИАЦИОННАЯ РАКЕТНАЯ | 2021 |
|
RU2753818C1 |
| АВИАЦИОННО-РАКЕТНАЯ УДАРНАЯ СИСТЕМА | 2019 |
|
RU2721803C1 |
| МНОГОЦЕЛЕВОЙ РАКЕТНЫЙ АВИАЦИОННЫЙ КОМПЛЕКС | 2019 |
|
RU2738224C2 |
| ГИБРИДНЫЙ РЕАКТИВНЫЙ САМОЛЕТ-ВЕРТОЛЕТ | 2019 |
|
RU2706430C1 |
| БЕСПИЛОТНЫЙ САМОЛЕТ-ВЕРТОЛЕТ-РАКЕТОНОСЕЦ | 2019 |
|
RU2708782C1 |
| НАДВОДНО-ПОДВОДНЫЙ КОРАБЛЬ С ПАЛУБНЫМ АВИАЦИОННЫМ УДАРНЫМ КОМПЛЕКСОМ | 2019 |
|
RU2721808C1 |
| МАЛОЗАМЕТНАЯ АВИАЦИОННО-РАКЕТНАЯ СИСТЕМА | 2019 |
|
RU2725372C1 |
| БЕСПИЛОТНЫЙ УДАРНЫЙ САМОЛЕТ-ВЕРТОЛЕТ | 2019 |
|
RU2733678C1 |
Изобретение относится к области вооружения, в частности к ракетным авиационным системам корабельного базирования. Система корабельно-авиационная ракетная (СКАР) содержит авианесущий ледокол (АНЛ) с реактивными летательными аппаратами, имеющими крыло, фюзеляж с пусковым устройством управляемой ракеты (УР), двигатель силовой установки и бортовую систему управления. СКАР включает модульные беспилотные и пилотируемые самолеты-вертолеты, имеющие крылья асимметричной стреловидности, содержащие на каждой консоли или одной из них надкрыльные пилоны с однолопастными несущими винтами (ОНВ). На правой или левой законцовках крыла имеются стыковочные узлы, разъемно соединяющие их консоли с верхним обтекателем совместно переносимой УР. Подкрыльные фюзеляжи снабжены комбинированными газотурбинными двигателями со свободными силовыми турбинами, приводящими их ОНВ и/или в кольцевых обтекателях их турбовентиляторы, создающие реактивную тягу с работающими/авторотирующими ОНВ или зафиксированными их лопастями при полете в конфигурации реактивного винтокрыла/автожира или самолета. Обеспечивается увеличение целевой нагрузки, поражение цели в режиме зависания и возврат с автоматической вертикальной посадкой на палубу атомного АНЛ. 2 з.п. ф-лы, 3 ил.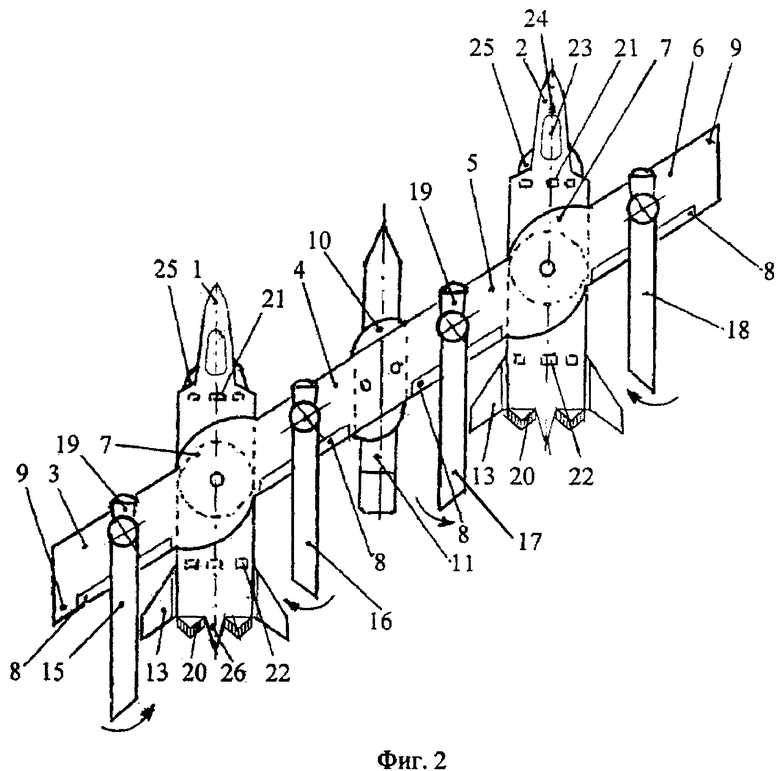
1. Система корабельно-авиационная ракетная (СКАР), содержащая авианесущий ледокол (АНЛ) с реактивными беспилотными летательными аппаратами (БЛА), имеющими крыло, фюзеляж с пусковым устройством (ПУ) управляемой ракеты (УР), двигатель силовой установки (СУ) и бортовую систему управления (БСУ), отличающаяся тем, что она имеет группу аппаратов вертикального взлета и посадки, включающую более чем два модульных беспилотных самолета-вертолета (МБСВ) с более чем парой модульных пилотируемых самолетов-вертолетов (МПСВ), используемых попарно как одного типа совместно, так и в их комбинации, но и более чем с одной вертолетной площадки упомянутого АНЛ, причем в комбинации двух МБСВ/МПСВ, выполненных с крыльями асимметричной стреловидности (КАС), имеющими как на правой/левой законцовках соответственно левого МБСВ/правого МПСВ их механизмы крепления и расцепления, образующие составное крыло и разъемно соединяющие их консоли с по меньшей мере одним подкрыльным пилоном или верхним обтекателем совместно ими переносимой съемной целевой нагрузки (СЦН) - упомянутой УР и после ее запуска одновременно отделяемые, например, от обтекателя УР в полете или после посадки соответственно с последующим раздельным или совместным их возвратом и автоматической вертикальной их посадкой на палубу упомянутого АНЛ, так и по передней кромке различную стреловидность, образующую при соединении соответствующих консолей КАС, например, с верхним обтекателем упомянутой УР так, что от центра масс последней концевые хорды внешних двух их консолей вынесены вперед или назад либо назад и вперед по полету, образуя от продольной оси упомянутой УР соответственно составное крыло обратной или прямой либо асимметричной стреловидности соответственно с углом χ=-45° или χ=+45° либо χ=±45°, но и две двухвинтовые поперечно-несущие системы (ДПНС), используемые при вертикальном или коротком взлете/посадке (ВВП или КВП), включающие одно- или двухлопастные несущие винты (ОНВ или ДНВ) с жестким креплением их лопастей, смонтированные на валах профилированных надкрыльных пилонов каждой консоли КАС составного крыла МБСВ/МПСВ, все, например, их ОНВ с профилированными противовесами или левый/правый и правый/левый из всех их ОНВ выполнены соответственно с автоматами или без автоматов и с автоматами их перекоса, возможностью изменения общего и циклического их шага и автоматической установки их лопастей в положение их авторотации, но и свободного их вращения с перекрытием равным a=1,22 при прохождении лопастей одного ОНВ перед втулкой другого так, чтобы наступающие их лопасти на режимах ВВП и зависания проходили над левым и правым бортами каждого подкрыльного фюзеляжа (ПКФ) от кормовой его части к носовой, создавали гармоничное сочетание поперечного и путевого управления при равном удалении в плане осей их вращения от центра масс и продольных осей упомянутой УР и их ПКФ, каждый из последних оснащен более чем одним комбинированным газотурбинным двигателем (КГтД), установленным в кормовой гондоле ПКФ с боковыми его воздухозаборниками и выполнен в виде двухконтурного двигателя, имеющего внешний и внутренний контуры соответственно с однорядным турбовентилятором (ОТВ) в кольцевом обтекателе и более чем одной свободной силовой турбиной (ССТ), передающей взлетную мощность, например, четырехдвигательной СУ посредством системы трансмиссии на соответствующие ОНВ в удвоенной ДПНС-Х2 и/или на соответствующие ОТВ, создающие, например, в удвоенной пропульсивно-реактивной системе (ПРС-R2) синхронную тягу при выполнении ВВП и КВП или горизонтальном полете, но и соединенные МБСВ/МПСВ выполнены с возможностью преобразования полетной их конфигурации после образования их двумя КАС составного крыла и выполнения вертикального или короткого взлета при нормальном или максимальном взлетном весе соответственно с четырехвинтового вертолета или винтокрыла с удвоенными ДПНС-Х2 и ПРС-R2 в реактивный крылатый автожир с авторотирующими ОНВ или самолет с зафиксированными их противовесами и лопастями, размещенными в плане параллельно продольным осям и ПКФ, и упомянутой УР соответственно как вперед и назад по полету, так и остановлены при флюгерном положении или нулевом угле установки их лопастей, которые закреплены соответственно вертикально или горизонтально параллельно плоскости симметрии МБСВ/МПСВ с их прямыми КАС, образующими, например, составное КАС с противоположно направленной стреловидностью χ=±45°, имеющее общий размах, определяемый из соотношения: LОР=RОНВ×a×4,34×cosχ=45°, м (где: RОНВ - радиус ОНВ, а - величина перекрытия ОНВ, χ - стреловидность КАС) и большое его удлинение λ=8,0, но и обратно.
2. СКАР по п. 1, отличающаяся тем, что в упомянутых МБСВ/МПСВ и кормовых их гондолах каждый ее КГтД содержит между упомянутыми ОТВ и ССТ и соосно с двумя последними Т-образный в плане осевой редуктор, имеющий продольный по его оси входной вал, например, от одной ССТ и выходные продольный и поперечный валы, первый из которых передает мощность через муфту сцепления на ОТВ, а второй - на Т-образный в плане главный редуктор, продольный вал которого вращательно связан с угловым фюзеляжным редуктором, вертикальная колонка которого, являясь жесткой осью поворотного шарнира круговой опоры их КАС, размещена соосно с последним, имеет выходной вал, связанный через муфту сцепления с Т-образным при виде сзади крыльевым редуктором, передающим выходными его валами равновеликую мощность на угловые редукторы их ОНВ, а в их ПКФ упомянутые боковые воздухозаборники, не имеющие пластинчатого отсекателя пограничного слоя и внутренних подвижных регулирующих элементов, выполнены и для экранирования лопаток ОТВ их упомянутых КГтД, и отведения пограничного слоя, и повышения коэффициента восстановления полного давления как без щели для слива пограничного слоя, но и каждый включает рампу, сжимающую поток и формирующую коническое его течение, а на режимах их ВВП и зависания с составным их КАС продольное управление осуществляется посредством изменения шага пары задних ОНВ в МБСВ и пары передних ОНВ в МПСВ, поперечное управление - изменением шага в группе внешних ОНВ МБСВ и МПСВ соответственно левого ОНВ и правого ОНВ, путевое управление - изменением крутящих моментов в расположенных вдоль его размаха парных группах ОНВ, вращающихся при виде сверху в одном направлении, например, внешний ОНВ МБСВ с внутренним МПСВ ОНВ и внутренний ОНВ МБСВ с внешним ОНВ МПСВ соответственно против часовой и по часовой стрелке, при этом упомянутые МБСВ/МПСВ с составным КАС на режимах их ВВП и зависания при удельной нагрузке на мощность комбинированной их СУ, составляющей ρN=1,92 кг/л.с., каждая упомянутая ССТ выполнена с элементами цифрового программного управления, сочетающего систему адаптивного управления формированием безопасного полета (УФБП) при удельной вертикальной тяговооруженности в упомянутой удвоенной ДПНС-Х2, составляющей с учетом потерь от обдува двух ПКФ и составного КАС ρВТ=1,85, включает режимы работы ССТ как взлетный, так и чрезвычайный режим (BP и ЧР) при отборе потребной ее мощности на привод упомянутых ОНВ соответственно как от двух работающих ССТ, так и от одной из работающих ССТ с автоматическим выравниванием и равным перераспределением оставшейся мощности между ОНВ при отказе соответствующей ССТ в КГтД, например, даже в последнем случае после автоматического включения ЧР работы оставшейся в работе ССТ, которая при удельной вертикальной тяговооруженности в упомянутой удвоенной ДПНС-Х2, составляющей ρВТ=1,07, обеспечит режим аварийной вертикальной посадки в течение 2,5 минут, а в каждой их ССТ система УФБП содержит: один или несколько датчиков, которые сконфигурированы для выявления данных, касающихся расхода воздуха (GB, кг/с) через компрессор ССТ, температуры газов (ТГ, К) перед турбиной ССТ, суммарной степени сжатия (К) компрессора, а также один или несколько датчиков, которые сконфигурированы для обнаружения относительного положения ПКФ и дисков вращения ОНВ для относительного их положения относительно уровня земли или поверхности посадочной площадки, а также различных препятствий на пути следящего управляемого его снижения; компьютер управления полетом, расположенный в их БСУ и находящийся в рабочем состоянии с одним или несколькими датчиками, компьютер управления полетом сконфигурирован, чтобы: определить относительную позицию между их ПКФ с колесным шасси и уровнем земли или поверхностью посадочной площадки; сравнить относительную позицию их ПКФ и несущей их системы с выбранной относительной их позицией; определить скорость автоматического снижения, необходимую для их перемещения в выбранное относительное положение; преобразовать скорость следящего устройства во входы управления полетом; а также обеспечить автоматическое безопасное снижение в выбранное относительное положение через входы управления полетом, а их компьютер управления полетом выполнен как с дополнительным компьютером суммирования данных датчиков, так и с возможностью преобразования данных с каждого датчика в относительное положение, которое определяет на основе глобального положения, причем в упомянутых МБСВ/МПСВ их КГтД для управления вектором тяги (УВТ) выполнены с прямоугольными плоскими соплами, отклоняющимися для продольного или поперечного управления соответственно синфазно или дифференциально вверх-вниз на угол ±15°, и термопоглощающим покрытием, уменьшая инфракрасное (ИК) излучение и их радиолокационную заметность, а левый их ПКФ между упомянутых КГтД оснащен вынесенным вдоль продольной его оси кормовым обтекателем с отсеком, имеющим на его конце выдвижную буксируемую на тросе ложную цель, а их планер выполнен из алюминиево-литиевых сплавов и композиционных материалов по малозаметной технологии с радиопоглощающим покрытием, при этом каждый малозаметный МБСВ/МПСВ выполнен соответственно без/с кабиной пилотов, снабженной внутри видеокамерами с автономными манипуляторами, подключаемыми к органам управления МПСВ и возможностью опционального его управления пилотами из двухместной кабины, имеющей катапультируемые в верхнюю полусферу кресла, смонтированные бок о бок, срабатывающие на режимах выполнения ВВП и зависания автоматически после отстрела пиропатронами лопастей ОНВ при аварийной ситуации, а их БСУ оснащена электродистанционной системой управления, реагирующей по меньшей мере на одну из систем автономного управления полетом, дистанционного управления оператором, управления из кабины пилотов и/или их комбинации, а каждый их ПКФ имеет от пирамидальной носовой их части скошенные по всей их длине боковые стороны, образующие с упомянутыми воздухозаборниками при виде спереди пяти- или шестигранное поперечное сечение, уменьшающее эффективную площадь рассеивания, но и радиолокационную и визуальную заметность, причем соединенные МБСВ/МПСВ, несущие под упомянутыми пилонами составного их КАС две стратегические крылатые ракеты (СКР) типа Х-555, образующие после их запуска автономные рои СКР с буксируемыми ложными их целями, использующие маловысотный профиль их полета и систему их самообороны - станцию активных электронных помех, повышают дальность их действия до 6407/9295 км, используя технологию ВВП/КВВП соответственно, и поражающую возможность, создают безопасную авиазону между АНЛ и ПВО цели, а их ПКФ для внутреннего вооружения имеют одно- и двухстворчатые соответственно боковые и нижние отсеки, ПУ которых с закрепленными на них УР воздух-воздух типа Р-77 и Р-37М смонтированы на внутренних сторонах створок и внутри отсеков соответственно, а комплекс их вооружения имеет авиационные пушки, встроенные в обтекателе нижней носовой части каждого ПФГ, поражающие дозвуковые ударные БЛА и СКР, при этом тяжеловооруженные соединенные МБСВ/МПСВ, несущие под пилоном составного их КАС гиперзвуковую противокорабельную ракету (ПКР) Х-47М2 «Кинжал», обеспечивают ее управляемый запуск на сверхзвуковой скорости и высоте 15 км и позволят достичь дальности ее полета до 2160/3570 км, используя технологии ВВП/КВВП, соответственно, а каждый их ПКФ имеет на их концах цельно-поворотные кили, отклоненные вниз под углом 43° к горизонтали и наружу от плоскости симметрии МБСВ/МПСВ, а каждое их КАС имеет треугольные в плане законцовки с внешними их сторонами, размещенными параллельно их оси симметрии, и крепится к круговой опоре, интегрированной с его S-образным в плане обтекателем и обеспечивающей после отключения крыльевого редуктора от трансмиссии поворот КАС в горизонтальной плоскости с размещением правой и левой консолей соответственно над носовой и кормовой частями их ПКФ, которые фиксируются вдоль оси последнего при их раздельном размещении в ангаре упомянутого АНЛ с установленными во флюгерное положение лопастями их ОНВ, складывающимися к их центру масс, и на равнее со сложенными их килями вниз уменьшают в 6,4…6,6 раза стояночную их площадь от взлетной, причем электронно-оптический датчик (ЭОД), предназначенный для обнаружения и идентификации цели, имеет приемную часть ЭОД, которая закрывается сверху сапфировым стеклом, устанавливается перед кабиной МПСВ сверху носовой части правого ПКФ и с радаром последнего обеспечивает на больших, безопасных расстояниях целеуказание и управление оружейными нагрузками и своими, и МБСВ с наведением на цель УР воздух-воздух и ПКР, СКР воздух-поверхность, но и его использования в составе авиагруппы в качестве головного МПСВ, например, с парой предыдущих и более чем парой из последующих ведомых, при этом каждый сенсорный компьютер предыдущих и последующих из ведомых МБСВ, сконфигурированные для восприятия акустических сигналов, имеет память, содержащую: данные, представляющие по меньшей мере одну траекторию полета головного МПСВ и предыдущих МБСВ; данные, представляющие как минимум один профиль их совместного полета; программные инструкции, выполняемые процессором, для расчета их группового полета, чтобы исполнить по меньшей мере текущий маршрут полета и по меньшей мере его профиль полета и сохранять текущий полет в памяти; программные инструкции, выполняемые процессором для полета МБСВ в соответствии с текущим профилем полета; мультимодальная логика, выполняемая процессором для вычисления способности динамически адаптироваться к изменяющимся условиям или параметрам, включая способность к координации авиагруппы, распределенному тактическому управлению, распределенным по целям авиагруппы и/или полностью, повышая эффективность ее атаки, интегрированы к автономному стратегическому роению, причем соединенные МБСВ/МПСВ, несущие в их ПКФ по 2\2 штук ПКР\УР типа X-38M\P-77 и под пилоном составного их КАС упомянутую СЦН-топливный бак, позволит, используя его топливо, долететь каждой их паре в авиагруппе до надводной цели, затем, разделяясь и атакуя ее роем, повысить поражающую возможность и дальность полета ПКР с 40 км до 1830 км, при этом упомянутый АНЛ, имеющий асимметричный корпус, выполнен с двухосадочной его схемой, позволяющей использовать осадку в диапазоне от 8,5 до 10,5 м для увеличения ледопроходимости и выполнения специальных задач на мелководье и устье рек, снабженный движительным комплексом, состоящим из пары основных и пары дополнительных соответственно кормовых и носовых винто-рулевых колонок (ВРК), каждая из которых, работая независимо и повышая эффективность маневрирования в любом направлении и даже вращения на месте, может как поворачиваться в горизонтальной плоскости на 360°, так и оснащена встроенным высокомоментным электродвигателем постоянного тока с соответствующим гребным винтом фиксированного шага (ВФШ), смонтированным непосредственно на валу внутри гондолы полноповоротной ВРК, причем установка носовых ВРК на упомянутом АНЛ обеспечивает высокую маневренность в ледовых условиях, но и на чистой воде, что очень важно в зонах с ограниченным водным пространством, но и, достигая эффекта размывания льда работой этих ВФШ, как снижает прочность льда и повышает способность прохождения торосов, так и оказывает вредное воздействие на работу кормовых ВРК, при этом для повышения эффективности пропульсивной установки упомянутого АНЛ пара носовых ВРК, которые, обеспечивая эффект расхождения векторов их тяги от продольной оси АНЛ, развернуты под углом друг к другу на эффективный упор АНЛ в режиме создания тягового усилия, причем пропульсивная установка с четырьмя ВРК и четырьмя джойстиками управления объединены в одном мостике с установкой двух навигационных мостиков - основного и дублирующего - для управления АНЛ во время хода и визуального контроля, улучшающего со второго мостика панорамный обзор при его движении косым ходом.
3. СКАР по любому из пп. 1, 2, отличающаяся тем, что для транс- либо сверхзвукового режима полета упомянутых соединенных МБСВ/МПСВ, достигая маршевой тяговооруженности первого уровня - 0,23 или второго - 0,28 либо третьего уровня - 0,44 или четвертого - 0,54, используется соответственно 27% или 36% либо 72% или 100% мощности их СУ на высоте 15 км с упомянутым составным КАС обеспечивается скорость 0,8 Маха (М) или M=0,894 либо транс- или сверхзвуковая скорость М=0,992 или М=1,11 соответственно, а каждый их КГтД снабжен его реактивным соплом с форсажной камерой, используемой на самолетных взлетных и сверхзвуковых режимах полета с передними перед упомянутым ОТВ и задними перед форсажной камерой открытыми управляемыми створками упомянутой гондолы для дополнительного в нее подвода воздуха, что позволит при нормальном/максимальном взлетном их весе на высоте 15 км повысить тяговооруженность их СУ с 0,54/0,47 до 0,78/0,68 и увеличить скорость с М=1,09/М=0,992 до М=1,2/М=1,09 соответственно, при этом отсутствие застекления лобовых окон или всех окон в кабине пилотов МПСВ позволит увеличить жесткость ПКФ и снизить толщину обшивки и, как следствие, уменьшить ее массу, причем планер МПСВ с герметичной кабиной, имеющей автоматически сбрасываемый непрозрачный бронефонарь для катапультирования пилотов и средства отображения цифрового изображения, представляющего часть внешней сцены, включающей окружающую среду, простирающуюся вперед и достаточную для пилотирования, оснащен множеством видеокамер, ИК-датчиков и видеодатчиков, обеспечивающих сенсорную съемку, фиксирующими в передней и задней полусферах все события на 360°, при этом для управления МПСВ в режиме реального времени изображение проходит цифровую корректировку и отображается модулем распределения видео на дисплеях кабины пилотов, делая ее обшивку или прозрачной, или видны на нашлемных дисплеях пилотов, которые, образуя общие окна просмотра, подключены к первому и второму процессорам расширенной системы зрения, сконфигурированы для ношения первым и вторым пилотом соответственно, причем первое и второе общие окна просмотра и выделенные отображенные линии визирования видны на первом и втором нашлемных дисплеях пилотов соответственно.
| ПРОТИВОЛОДОЧНЫЙ РАКЕТНЫЙ КОМПЛЕКС С АВТОНОМНЫМ РЕАКТИВНЫМ САМОЛЕТОМ-НОСИТЕЛЕМ И СПОСОБ ЕГО ПРИМЕНЕНИЯ | 2017 |
|
RU2699616C2 |
| АВИАЦИОННЫЙ КОМПЛЕКС ВЕРТИКАЛЬНОГО ВЗЛЕТА | 2014 |
|
RU2582743C1 |
| Многоразовая космическая система и способ ее управления | 2019 |
|
RU2717406C1 |
| WO 2018148248 A1, 16.08.2018 | |||
| US 20020092949 A1, 18.07.2002. | |||

