Изобретение относится к области электротехники и может быть применено в качестве способа испытания асинхронных двигателей методом взаимной нагрузки.
Аналогом предлагаемого изобретения является схема испытания асинхронных электродвигателей методом их взаимной нагрузки, состоящая из неуправляемого выпрямителя, получающего питание от трехфазной сети, двух однотипных управляемых инверторов, двух однотипных испытуемых асинхронных двигателей, механически связанных между собой посредством муфты и получающих питание от управляемых инверторов, характеризующаяся тем, что для питания двух однотипных инверторов используется одно звено постоянного тока, получающее питание от одного неуправляемого выпрямителя (RU 145998 U1, 27.09.2014) [1].
Недостатком приведенного аналога является то, что данная схема не имеет средств автоматизации, что может привести к перегрузке в процессе нагружения испытуемого двигателя, кроме того, данный аналог реализует способ управления величиной момента нагрузки на валу путем изменения частоты напряжения без оптимизации величины действующего значения данного напряжения с целью снижения потерь.
Другим аналогом предлагаемого изобретения является схема испытания асинхронных электродвигателей методом их взаимной нагрузки, состоящая из двух неуправляемых выпрямителей, получающих питание от трехфазной сети, двух звеньев постоянного тока, электрически связанных между собой, входы которых соединены с выходами неуправляемых выпрямителей, двух однотипных управляемых инверторов, входы которых соединены с выходами звеньев постоянного тока, муфты, механически связывающей между собой испытуемые асинхронные двигатели, получающие питание от управляемых инверторов, оснащенная системой управления, выходы которой соединены с входами управляемых инверторов, а входы которой соединены с выходами следующих устройств: двух датчиков тока, входы которых соединены с выходами управляемых инверторов, датчика скорости, соединенного с роторами испытуемых асинхронных двигателей, двух вычислителей частоты питающего напряжения, входы которых соединены с выходами управляемых инверторов, и задатчика параметров сети и испытуемых асинхронных двигателей. (RU 163996 U1, 20.08.2016) [2].
Недостатком приведенного аналога является то, что данная схема испытания реализует способ управления величиной момента нагрузки на валу путем изменения частоты напряжения без оптимизации величины действующего значения данного напряжения с целью снижения потерь.
Прототипом предлагаемого изобретения является стенд для испытания асинхронных машин состоящий из муфты, механически соединяющей валы двух асинхронных машин, преобразователя частоты со звеном постоянного тока и двумя управляемыми выпрямитель-инверторами, позволяющими передавать электрическую энергию через преобразователь частоты не только от промышленной сети к асинхронному двигателю, но и в обратном направлении; силовой вход первого управляемого выпрямитель-инвертора подключен к сети, а выход к звену постоянного тока, силовой вход второго управляемого выпрямитель-инвертора подключен к тому же звену постоянного тока, а выход подключается к обмотке статора первой асинхронной машины, оснащенный задатчиком параметров, контактором, вычислителем частоты питающего напряжения, системой управления, датчиком тока, датчиком частоты вращения; выходы системы управления соединены с управляющими входами управляемых выпрямитель-инверторов и управляющим входом контактора, входы системы управления соединены с выходом задатчика параметров, выходом вычислителя частоты питающего напряжения, вход которого соединен с выходом управляемого инвертора; выходом датчика тока, вход которого соединен с выходом управляемого выпрямитель-инвертора, выходом датчика частоты вращения, соединенного с валами асинхронных машин; обмотка статора второй асинхронной машины подключается к сети через контактор (RU 186188 U1, 11.01.2019) [3].
Недостатком приведенного прототипа является то, что данная схема испытания реализует способ управления величиной момента нагрузки на валу путем изменения частоты напряжения без оптимизации величины действующего значения данного напряжения с целью снижения потерь.
Целью предлагаемого изобретения является снижение потерь мощности при испытании асинхронных машин методом взаимной нагрузки.
Указанная цель достигается тем, что при испытаниях асинхронных двигателей методом взаимной нагрузки, включающем нагружение получающего питание от источника переменного тока испытуемого асинхронного двигателя тормозным моментом, создаваемым нагрузочной асинхронной машиной, работающей в генераторном режиме, вал которой жестко соединен с валом испытуемого асинхронного двигателя муфтой; обмотка статора нагрузочной асинхронной машины присоединена к управляемому инвертору, управляющий вход которого подключен к выходу системы управления, входы которой соединены с выходом датчика частоты вращения, соединенного с валами асинхронных машин, и выходом вычислителя частоты напряжения, вход которого соединен с выходом управляемого инвертора; нагрузочный момент создается за счет снижения частоты переменного напряжения, формируемого управляемым инвертором; в процессе снижения формируемой управляемым инвертором частоты переменного напряжения, снижается также и его действующее значение до минимально необходимого для создания на валу испытуемого асинхронного двигателя его номинального момента.
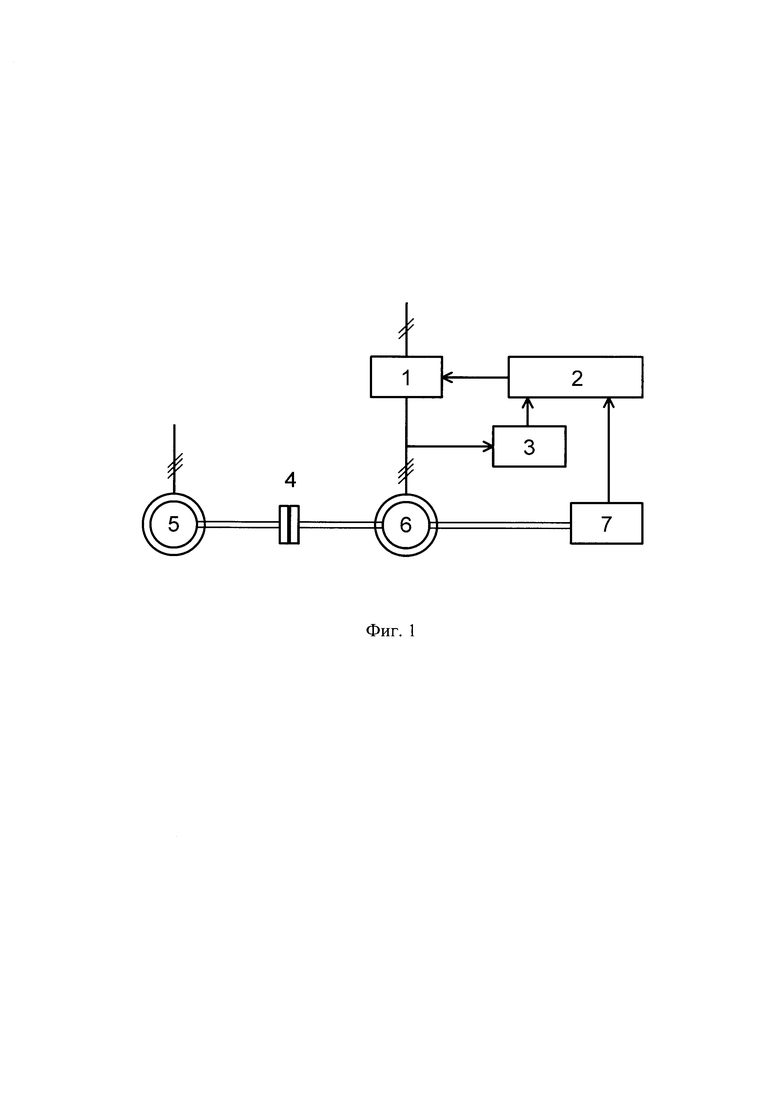
На фиг. 1 представлена блок-схема, поясняющая предлагаемый способ испытания асинхронных двигателей методом взаимной нагрузки.
На блок-схеме показаны управляемый инвертор 1, система управления 2, вычислителя частоты напряжения 3, муфта 4, испытуемый асинхронный двигатель 5, нагрузочная асинхронная машина 6, датчика частоты вращения 7.
Муфта 4 соединяет валы испытуемого асинхронного двигателя 5 и нагрузочной асинхронной машины 6, на обмотку статора которой подается питание с выхода управляемого инвертора 1. К управляющему входу управляемого инвертора 1 подключен выход системы управления 2. На силовой вход управляемого инвертора 1 подается постоянное напряжение, на обмотку статора испытуемого асинхронного двигателя 5 подается переменное трехфазное напряжение.
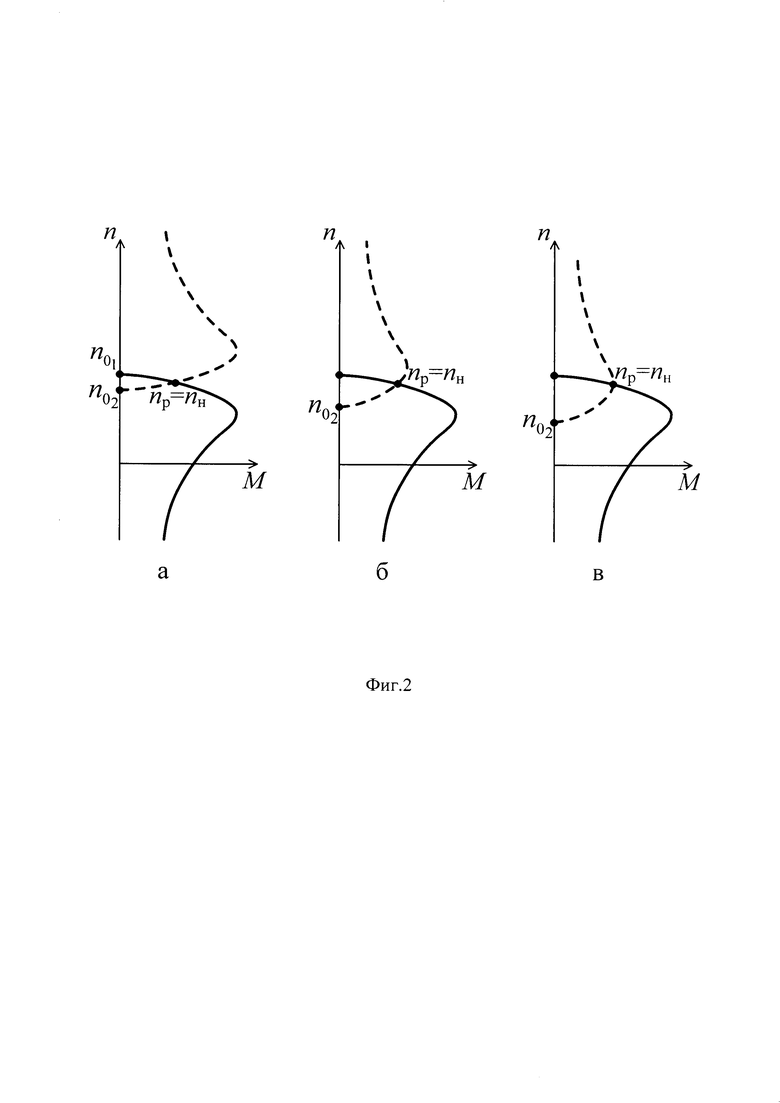
На фиг. 2 представлены механические характеристики на различных этапах процесса реализации предлагаемого способа испытания асинхронных двигателей методом взаимной нагрузки. На всех представленных координатных плоскостях сплошная линия соответствует механической характеристике испытуемого асинхронного двигателя, пунктирная линия - механической характеристике нагрузочной асинхронной машины.
Предлагаемый способ реализуется следующим образом. На первом этапе вывод испытуемого асинхронного двигателя 5 на режим номинальной нагрузки происходит путем задания разности частот напряжений, подаваемых на обмотки статора обеих машин 5 и 6, например, способом, приведенным в описании прототипа (запуск машин 5 и 6 на холостом ходу с последующим уменьшением частоты переменного напряжения, подаваемого на обмотку статора нагрузочной асинхронной машины 6, по сравнению с частотой переменного напряжения, подаваемого на обмотку статора испытуемого асинхронного двигателя 5). Механические характеристики испытуемого асинхронного двигателя 5 и нагрузочной асинхронной машины 6 при этом принимают вид, приведенный на фиг. 2, а. Частота вращения ротора nр, контролируемая при помощи датчика частоты вращения 7, принимает значение равное номинальному значению частоты вращения ротора испытуемого асинхронного двигателя nр.н.
На втором этапе происходит пошаговое снижение частоты напряжения ƒ2, питающего нагрузочную машину 6, контролируемая при помощи вычислителя частоты напряжения 3. После каждого шага снижения частоты производится проверка условия: «стала ли частота вращения ротора nр выше, чем была до выполненного шага увеличения частоты ƒ2». После каждого шага снижения частоты ƒ2, если частота вращения ротора nр увеличилась, то производится плавное снижение действующего значения напряжения U2, питающего нагрузочную машину 6, до достижения частоты вращения ротора номинального значения (nр=nр.н). Если после очередного шага снижения частоты ƒ2 частота вращения ротора nр увеличилась, то ƒ2 увеличивается до ее предыдущего значения, и на этом процесс снижения частоты ƒ2 и действующего значения напряжения U2 заканчивается. В процессе регулирования частоты ƒ2 и действующего значения напряжения U2 механические характеристики машин принимают вид, приведенный на фиг. 2, б. По окончании регулирования ƒ2 и U2, механические характеристики принимают вид, приведенный на фиг. 2, в, что соответствует совпадению максимального момента нагрузочной асинхронной машины в генераторном режиме с номинальным моментом испытуемого асинхронного двигателя при номинальной частоте вращения его ротора.
Таким образом, предложенное изобретение позволяет снизить действующее значение напряжения U2 до минимально необходимого для создания на валу испытуемого асинхронного двигателя его номинального момента. Снижение действующего значения напряжения U2 позволяет снизить потери мощности при испытании асинхронных машин методом взаимной нагрузки за счет уменьшения постоянных потерь в нагрузочной асинхронной машине.
Источники информации:
1. Патент на полезную модель Р.Ф. №145998, МПК G01R 31/34, 2014.
2. Патент на полезную модель Р.Ф. №163996, МПК G01R 31/34, 2016.
3. Патент на полезную модель Р.Ф. №186188, МПК G01R 31/34, Н02K 15/02 2018.
| название | год | авторы | номер документа |
|---|---|---|---|
| Стенд для испытания асинхронных машин и способ их нагружения | 2018 |
|
RU2691778C1 |
| Способ нагружения асинхронного двигателя при его испытании методом взаимной нагрузки | 2019 |
|
RU2712741C1 |
| СПОСОБ СТАБИЛИЗАЦИИ МОМЕНТА ВРАЩЕНИЯ СИЛОВЫХ ГИРОСТАБИЛИЗАТОРОВ | 2008 |
|
RU2385530C1 |
| Стенд для испытания передач | 1980 |
|
SU922568A1 |
| Электропривод переменного тока | 1990 |
|
SU1750015A1 |
| СТЕНД ДЛЯ ИСПЫТАНИЯ ЭЛЕКТРИЧЕСКИХ МАШИН В ДИНАМИЧЕСКОМ РЕЖИМЕ | 2014 |
|
RU2561230C1 |
| Стенд для испытания механических передач | 1983 |
|
SU1153251A1 |
| СИСТЕМА СТАБИЛИЗАЦИИ МОМЕНТА ВРАЩЕНИЯ СИЛОВЫХ ГИРОСТАБИЛИЗАТОРОВ | 2008 |
|
RU2382334C1 |
| Стенд для испытания передач | 1983 |
|
SU1096516A1 |
| СТЕНД ДЛЯ ИСПЫТАНИЯ РОЛИКОВЫХ ЦЕПЕЙ | 2008 |
|
RU2362983C1 |
Изобретение относится к области электротехники и может быть применено в качестве способа испытания асинхронных двигателей. Способ включает нагружение получающего питание от источника переменного тока испытуемого асинхронного двигателя тормозным моментом, создаваемым нагрузочной асинхронной машиной, работающей в генераторном режиме, вал которой жестко соединен с валом испытуемого асинхронного двигателя муфтой. Обмотка статора нагрузочной асинхронной машины присоединена к управляемому инвертору, управляющий вход которого подключен к выходу системы управления, входы которой соединены с выходом датчика частоты вращения, соединенного с валами асинхронных машин, и выходом вычислителя частоты напряжения, вход которого соединен с выходом управляемого инвертора. Нагрузочный момент создается за счет снижения частоты переменного напряжения, формируемого управляемым инвертором. В процессе снижения формируемой управляемым инвертором частоты переменного напряжения снижается также и его действующее значение до минимально необходимого для создания на валу испытуемого асинхронного двигателя его номинального момента. Технический результата заключается в снижении потерь при испытаниях асинхронных двигателей методом взаимной нагрузки путем снижения действующего значения напряжения, подаваемого на обмотку статора нагрузочной машины. 2 ил.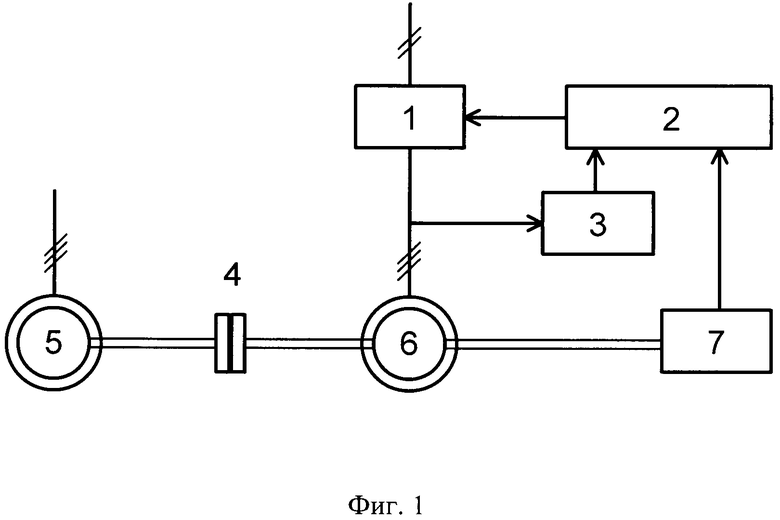
Способ испытания асинхронных двигателей методом взаимной нагрузки, включающий нагружение получающего питание от источника переменного тока испытуемого асинхронного двигателя тормозным моментом, создаваемым нагрузочной асинхронной машиной, работающей в генераторном режиме, вал которой жестко соединен с валом испытуемого асинхронного двигателя муфтой; обмотка статора нагрузочной асинхронной машины присоединена к управляемому инвертору, управляющий вход которого подключен к выходу системы управления, входы которой соединены с выходом датчика частоты вращения, соединенного с валами асинхронных машин, и выходом вычислителя частоты напряжения, вход которого соединен с выходом управляемого инвертора; нагрузочный момент создается за счет снижения частоты переменного напряжения, формируемого управляемым инвертором, отличающийся тем, что в процессе снижения формируемой управляемым инвертором частоты переменного напряжения снижается также и его действующее значение до минимально необходимого для создания на валу испытуемого асинхронного двигателя его номинального момента.
| Устройство для дистанционного управления перемещением кареток координатографа, например, знакопечатающего или сличающего картографического аппарата | 1960 |
|
SU140678A1 |
| Пневматический зерноперегружатель | 1960 |
|
SU143348A1 |
| УСТАНОВОЧНОЕ УСТРОЙСТВО ДЛЯ БУРИЛЬНЫХ МАШИН С | 0 |
|
SU163996A1 |
| СПОСОБ ИСПЫТАНИЯ АСИНХРОННЫХ ЭЛЕКТРОДВИГАТЕЛЕЙ МЕТОДОМ ИХ ВЗАИМНОЙ НАГРУЗКИ | 2010 |
|
RU2433419C1 |

