Изобретение относится к сельскохозяйственному машиностроению. Система предназначена для обеспечения управлением машинами для дифференцированного и недифференцированного внесения жидких химических составов, таких как: гербициды, пестициды, фунгициды, минеральные удобрения и прочее, при пространственной изменчивости плодородия почв.
Известны различные устройства управления опрыскивателей. Например, известен опрыскиватель для обработки полевых культур по патенту ЕАПВ на изобретение № ЕА 10997 (МПК A01M 7/00), устанавливаемый на транспортное средство, который обеспечивает поддержание на постоянном количественном уровне рабочей жидкости на единицу площади, независимо от изменений скорости движения транспортного средства. Регулирование расхода рабочей жидкости известного устройства представляет собой механическую передачу, соединенную с валом отбора мощности трансмиссии транспортного средства и валом привода насоса для обеспечения фиксированного соответствия расхода рабочей жидкости рабочей скорости движения транспортного средства для каждого передаточного отношения и выполненную с набором передаточных отношений для обеспечения работы распылителей заданной производительности в режиме, определяющем дозу внесения препарата на обрабатываемую поверхность.
Кроме того, известно техническое решение для внесения жидких минеральных удобрений «Geoline GeoSystem 260», выпускаемое фирмой «Tecomec», включающее энергетическое средство с панелью управления, емкость для внесения жидких минеральных удобрений, датчик скорости, заборный фильтр, центробежный насос, блок исполнительных механизмов, состоящий из клапана регулировки давления, расходомер, выпускных секционных клапанов, оборудованных механизмами регулировки обратного потока жидкости и штангами с форсунками.
Недостатком известных устройств является невозможность дифференцированного внесения жидких минеральных удобрений, как по составу, так и по количеству вносимых удобрений при пространственной изменчивости плодородия почвы.
Наиболее близким по совокупности существующих признаков аналогом к заявленному изобретению (прототипом) является полевой опрыскиватель для автоматического регулирования технологического процесса внесения жидких минеральных удобрений по патенту РФ на изобретение № 2629784 (МПК A01C 23/02). Полевой опрыскиватель для автоматического регулирования технологического процесса внесения жидких минеральных удобрений содержит энергетическое средство с панелью управления, емкость для внесения жидких минеральных удобрений, датчик скорости, модуль частотного ввода, вычислительное устройство (контроллер) с видеотерминалом, навигатором, флэш-памятью, модуль дискретного вывода, блок впускных клапанов, заборный фильтр, центробежный насос, блок исполнительных механизмов, состоящий из клапана регулировки давления, расходомера, блока выпускных клапанов, датчика давления, блока обработки сигнала датчика давления, схемы управления шагового двигателя, с осью вращения, магистрального канала подачи жидких удобрений, штанги с форсунками. Полевой опрыскиватель с устройством автоматического регулирования технологического процесса внесения жидких минеральных удобрений работает следующим образом. Движение энергетического средства с емкостью для внесения жидких минеральных удобрений регистрируется импульсными сигналами с датчика скорости, которые поступают на один из входов модуля частотного ввода. С выхода модуля частотного ввода, частота, преобразованная в цифровой код, по интерфейсу RS-485 подается в контроллер, где в соответствии с измеренной скоростью и местоположением, определяемым навигатором, определяется расход жидкости и норма внесения удобрений на каждом дискретном участке поля по программе, записанной в памяти контроллера с флэш-памяти. В соответствии с этим расчетом контроллер по интерфейсу RS-485 подает сигнал на открытие, через модуль дискретного вывода, одного или нескольких клапанов блока впускных клапанов, выбирая нужную концентрацию состава жидких минеральных удобрений по процентному содержанию N, Р, K для осуществления дифференцированного внесения удобрений. По магистральному каналу жидких минеральных удобрений через заборный фильтр центробежный насос подает раствор минеральных удобрений на клапан регулировки давления. Эта жидкость поступает через расходомер на блок выпускных клапанов, и далее на штанги распылителей жидкости. Если в процессе работы по программе необходимо отключить одну или несколько секций, то контроллер по интерфейсу RS-485 подает команду на модуль дискретного вывода закрытия соответствующего выпускного клапана, а чтобы давление в остальных форсунках распылителей оставалось неизменным, датчик давления передает изменение давления через блок обработки сигнала датчика давления по интерфейсу RS-485 в контроллер, который отрабатывает изменение давления, подавая через модуль дискретного вывода команды на схему управления шаговым двигателем, с осью вращения, меняющего проходное сечение клапана регулировки давления. Расходомер осуществляет контроль за нормой расхода жидкости, подавая частотный сигнал на другой вход модуля частотного ввода и далее информация о расходе жидкости в цифровом виде поступает в контроллер по интерфейсу RS-485. Указанный прототип имеет ряд недостатков. К числу которых следует отнести отсутствие возможности контроля нормы вылива и расходования жидкого химического состава, отсутствие обратной связи с оператором в случае неработоспособности элементов системы.
Задача, которую поставил перед собой разработчик новой системы управления опрыскивателем состояла в создании такой системы управления, которая позволила бы повысить качество внесения жидких химических составов (гербициды, пестициды, фунгициды, минеральные удобрения) и, как следствие повысить урожайность сельскохозяйственных культур за счет своевременного контроля за расходом рабочей жидкости (дифференциального внесения). Технический результат заключается в повышении точности контроля за расходованием жидкого химического состава в опрыскивателе. Также технический результат заключается в расширении арсенала технических средств, за счет обеспечения возможности возобновления прерванной работы с момента остановки. Технический результат достигается за счет всей совокупности существенных признаков.
Сущность изобретения состоит в том, что система управления опрыскивателем, состоящая из головного устройства с устройством буферизации, выполненым с возможностью временного хранения данных в случае потери связи между головным устройством и сервером мониторинга, блока управления, антенно-фидерного комплекта, расходомера, выполненного с возможностью измерения потока жидкости, подаваемого в штангу опрыскивателя, датчика давления, выполненного с возможностью измерения давления жидкости в опрыскивателе, датчика скорости, главного клапана, выполненного с возможностью включения/выключения потока жидкости в опрыскивателе, пропорционального клапана, выполненного с возможностью регулирования потока жидкости в опрыскивателе, блока секционных клапанов, выполненный с возможностью включения/отключения потока жидкости в отдельных секциях опрыскивателя, блока управляемых форсунок, выполненного с возможностью включения/отключения потока жидкости на отдельные форсунки опрыскивателя, сервера мониторинга, выполненного с возможностью, сбора и хранения информации о работе системы управления опрыскивателем, подсветки, причем головное устройство электрическим кабелем по интерфейсу CAN или RS232, соединено с антенно-фидерным комплектом и блоком управления, а блок управления электрическим кабелем по интерфейсу CAN или RS232 соединен с расходомером, датчиком давления, датчиком скорости, главным клапаном, пропорциональным клапаном, блоком секционных клапанов и блоком управляемых форсунок, расходомер соединен с блоком секционных клапанов и пропорциональным клапаном, а датчик давления соединен с блоком секционных клапанов, причем сервер мониторинга соединен с головным устройством по беспроводному каналу связи. Кроме того головное устройство выполнено в виде портативного электронно-вычислительного устройства, оснащенного сенсорным экранным модулем, интерфейсами подключения и элементами звуковой и световой индикации. В свою очередь антенно-фидерный комплект выполнен в виде GPS/GLONASS антенны в форме гриба с высокочастотным кабелем. А расходомер выполнен в виде участка трубы с установленным в нем датчиком. Вместе с тем, датчик давления представляет собой измерительное устройство цилиндрической формы с резьбой и чувствительным элементом на конце. А датчик скорости выполнен в виде измерительного устройства прямоугольной или цилиндрической формы, реагирующее на приближение к нему металлических предметов. Кроме того главный клапан выполнен в виде трехходового электромагнитного клапана. А пропорциональный клапан выполнен в виде трехходового электромагнитного клапана. В свою очередь блок секционных клапанов представляет собой набор трехходовых электромагнитных клапанов. А блок управляемых форсунок представляет собой набор малогабаритных двухходовых электромагнитных клапанов, разнесенных вдоль крайних секций штанги опрыскивателя.
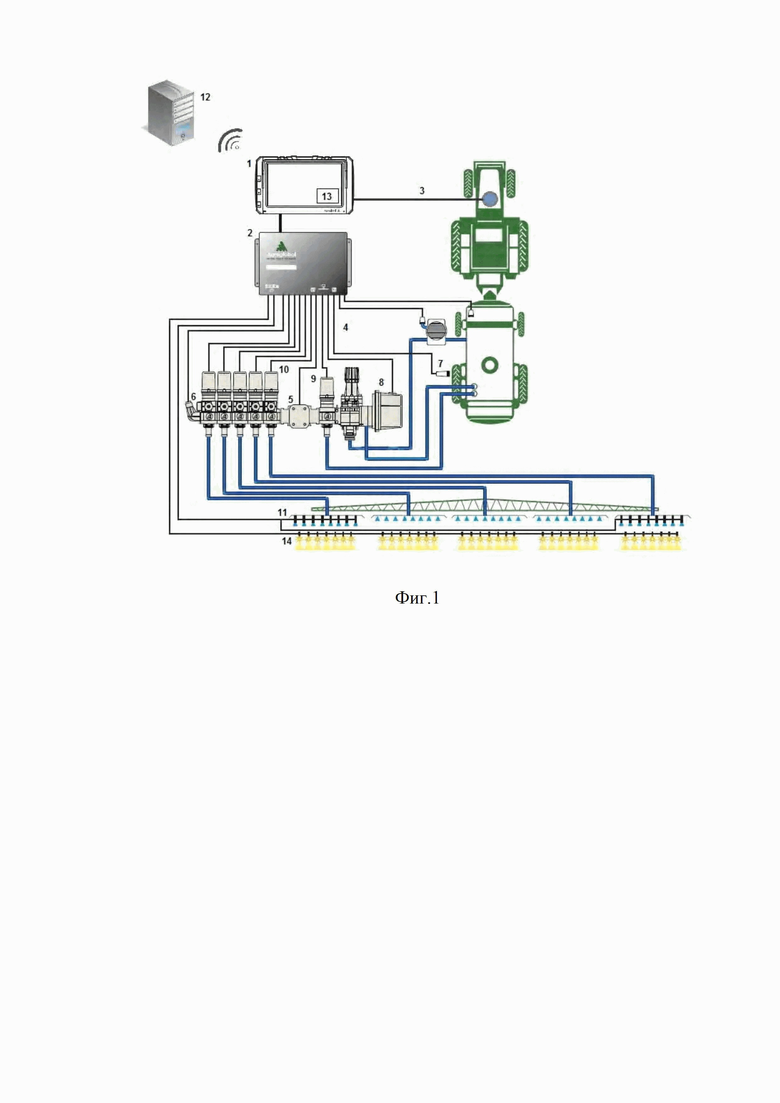
Изобретение поясняется графически, где:
на фиг. 1 общий вид системы управления опрыскивателем;
Система управления опрыскивателем состоит из головного устройства 1, блока управления 2, антенно-фидерного 3 и жгутового комплектов 4, расходомера 5, датчика давления 6, датчика скорости 7, главного клапана 8, пропорционального клапана 9, блока секционных клапанов 10, блока управляемых форсунок 11, сервера мониторинга 12, устройства буферизации 13, подсветки 14. Головное устройство 1 представляет собой портативное электронно-вычислительное устройство прямоугольной формы, оснащенное жидкокристаллическим сенсорным экранным модулем, необходимыми интерфейсами подключения и элементами звуковой и световой индикации. Головное устройство 1 предназначено вычисления и отображения текущего положения сельскохозяйственной техники, на которой установлено, и управления процессом внесения жидких и твердых химических препаратов при выполнении сельскохозяйственных работ. Таким образом, головное устройство 1 выполняет функцию навигации, вычисления необходимых параметров процесса внесения и обмена данных с блоком управления 2. Кроме того, головное устройство 1 обеспечивает ввод/вывод данных посредством сенсорного экранного модуля. Головное устройство 1 соединено с GNSS антенной, источником питания и блоком управления 2 с помощью проводов. Блок управления 2 представляет собой электронное устройство, заключенное в металлический корпус прямоугольной формы, оснащенный необходимыми разъемами для подключения электрических жгутов. Блок управления 2 предназначен для сбора показаний от датчиков системы управления опрыскивателем, управлением исполнительными устройствами и механизмами и обмена данными с головным устройством 1. Блок управления 2 соединен с головным устройством 1, датчиками, исполнительными устройствами и механизмами системы с помощью жгутов. Антенно-фидерный комплект 3 представляет собой GPS/GLONASS антенну в форме гриба и высокочастотный кабель. Антенно-фидерный комплект 3 предназначен для приема сигналов от спутников и передачи их в головное устройство 1. Антенно-фидерный комплект 3 соединен с головным устройством 1. Жгутовый комплект 4 представляет собой жгуты сигнальных и питающих проводов, оконцованные необходимыми разъемами. Жгутовый комплект 4 предназначен для электрического соединения элементов системы между собой. Расходомер 5 представляет собой измерительное устройство в виде участка трубы с установленным в нем датчиком. Расходомер 5 предназначен для измерения потока жидкости, подаваемого в штангу опрыскивателя. Расходомер 5 соединен механически и по водяной части с блоком секционных клапанов 10 и пропорциональным клапаном 9, по электрической части соединен проводами с блоком управления 2. Датчик давления 6 представляет собой измерительное устройство цилиндрической формы с резьбой и чувствительным элементом на конце. Датчик давления 6 предназначен для измерения давления жидкости в системе. Датчик давления 6 соединен механически с блоком секционных клапанов 10, электрически соединен проводами с блоком управления 2. Датчик скорости 7 представляет собой устанавливаемое на ступицу колеса измерительное устройство прямоугольной или цилиндрической формы, реагирующее на приближение к нему металлических предметов. Датчик скорости 7 предназначен для измерения скорости движения транспортного средства. Датчик скорости 7 электрически соединен проводами с блоком управления 2, механически установлен на колесо с помощью подходящего крепежного приспособления. Главный клапан 8 представляет собой трехходовой электромагнитный клапан, представляющий собой задвижку, приводимую в движение электрическим двигателем постоянного тока. Главный клапан 8 предназначен для включения/отключения потока жидкости в системе опрыскивателя путем подачи на него соответствующего управляющего сигнала. Главный клапан 8 соединен проводами с блоком управления 2. Пропорциональный клапан 9 представляет собой трехходовой электромагнитный клапан, представляющий собой задвижку, приводимую в движение электрическим двигателем постоянного тока. В отличие от главного клапана, задвижка пропорционального клапана может принимать любое промежуточное положение между положениями «открыто» и «закрыто». Пропорциональный клапан 9 предназначен для регулирования потока жидкости в системе опрыскивателя путем подачи на него соответствующего управляющего сигнала. Пропорциональный клапан 9 соединен проводами с блоком управления 2. Блок секционных клапанов 10 представляет собой набор трехходовых электромагнитных клапанов и предназначен для включения/отключения потока жидкости в отдельных секциях опрыскивателя. Блок секционных клапанов 10 соединен проводами с блоком управления 2. Блок управляемых форсунок 11 представляет собой набор малогабаритных двухходовых электромагнитных клапанов, разнесенных вдоль крайних секций штанги опрыскивателя для минимизации перекрытий. Блок управляемых форсунок 11 предназначен для включения/отключения потока жидкости на отдельные форсунки опрыскивателя. Блок управляемых клапанов 11 соединен проводами с блоком управления 2. Сервер мониторинга 12 представляет собой удаленное хранилище данных. Сервер мониторинга 12 предназначен для данных, поступающих с головного устройства 1, и доступа к этим данным. Сервер мониторинга 12 соединен головным устройством 1 по беспроводному каналу с помощью беспроводной технологии 3G/4G (WiFi, Bluetooth). Устройство буферизации 13 представляет собой ячейку памяти или файл данных в памяти головного устройства 1. Устройство буферизации 13 предназначено для временного хранения данных в случае потери связи между головным устройством 1 и сервером мониторинга 12. Устройство буферизации 13 физически расположено внутри головного устройства 1. Подсветка 14 представляет собой осветительные элементы светодиодного типа и кабельные жгуты питания, устанавливаемые на штанге опрыскивателя. Подсветка 14 предназначена для оценки качества работы каждого факела распыления в отдельности при выполнении работ по опрыскиванию в темное время суток. Подсветка 14 соединена проводами с блоком управления 2.
Работает система управления опрыскивателем следующим образом. При помощи интерфейса головного устройства 1 по команде оператора включают блок управления 2. При этом команду на включение, а также другие управляющие команды транслируют по внутреннему протоколу с помощью интерфейса CAN или RS232 в блок управления 2. Затем через блок управления 2 подают команду на главный клапан 8 о нагнетании давления в магистрали опрыскивателя. При необходимости корректируют производительность через блок управления 2, подавая команду на пропорциональный клапан 9 об увеличении/уменьшении потока жидкости в зависимости от заданной нормы внесения и текущей скорости движения транспортного средства. Далее через блок управления 2 отправляют команду на блок секционных клапанов 10 о подаче состава на форсунки опрыскивателя. При необходимости для уменьшения влияния пересечения треков (например, для исключения двойной обработки) через блок управления 2 отправляют команду на соответствующие секции или управляемые форсунки 11 опрыскивателя по соответствующим проводам. В процессе работы контролируют остаток жидких химических составов в опрыскивателе при помощи датчика давления 6, при помощи которого определяют уровень жидких химических составов. Дополнительно головное устройство 1 контролирует остаток жидких химических составов в опрыскивателе математически, вычисляя остаток из данных по текущему расходу, введенной информации о начальном объеме состава и состояния клапанов блока секционных клапанов 9. Для обеспечения работы системы управления опрыскивателем в условиях недостаточной видимости при помощи интерфейса головного устройства 1 на блок управления 2 подают команду о включении ночного режима. Данный режим активирует каналы, предназначенные для включения системы подсветки 14, и переводит интерфейс в ночной режим. В процессе работы системы управления опрыскивателем непрерывно записывают данные о траектории движения транспортного средства на внутреннюю энергонезависимую память головного устройства 1. Благодаря чему обеспечивают возможность возобновления прерванной работы в любой момент времени с момента остановки. Дополнительно информацию передают посредством канала 3G/4G на сервер мониторинга 12, где собирают информацию о работе системы управления опрыскивателем, такую как: текущая норма вылива, заданная норма вылива, состояние секционных клапанов, давление в системе, ширина захвата орудия, состояние подсветки, состояние управляемых форсунок, напряжение и температура блока управления и др.
При проведении работ в зонах с неуверенным или отсутствующим покрытием данные накапливаются в устройстве буферизации внутри головного устройство. При появлении активного канала передачи данных, блок управления автоматически выгрузит накопленные данные из устройства буферизации на сервер.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для внутрипочвенного дифференцированного внесения жидких минеральных удобрений и пестицидов | 2021 |
|
RU2770488C1 |
| Полевой опрыскиватель для автоматического регулирования технологического процесса внесения жидких минеральных удобрений | 2015 |
|
RU2629784C2 |
| Машина для дифференцированного внесения пестицидов, жидких минеральных удобрений и других агрохимикатов | 2020 |
|
RU2748996C1 |
| Автоматизированный агрегат для дифференцированного внесения жидких минеральных удобрений | 2017 |
|
RU2676319C1 |
| АВТОЖИР ДЛЯ ДИФФЕРЕНЦИРОВАННОГО ВНЕСЕНИЯ ЖИДКИХ СРЕДСТВ ХИМИЗАЦИИ | 2014 |
|
RU2589801C1 |
| СИСТЕМЫ И УСТРОЙСТВА ДЛЯ УПРАВЛЕНИЯ И МОНИТОРИНГА ВНЕСЕНИЯ ЖИДКОСТЕЙ НА СЕЛЬСКОХОЗЯЙСТВЕННЫХ ПОЛЯХ | 2016 |
|
RU2727483C2 |
| Беспилотный вертолет для внесения пестицидов, удобрений и других агрохимикатов в точном земледелии | 2021 |
|
RU2754790C1 |
| Комплекс летательных аппаратов для дифференцированного внесения жидких средств химизации | 2016 |
|
RU2622617C1 |
| РАСТЕНИЕПИТАТЕЛЬ | 2024 |
|
RU2833329C1 |
| Мобильный робот для контактного нанесения пестицидов | 2023 |
|
RU2797047C1 |
Изобретение относится к сельскохозяйственному машиностроению. Предложена система управления опрыскивателя, предназначенного для внесения гербицидов, пестицидов, фунгицидов, минеральных удобрений, состоящая из головного устройства с устройством буферизации, датчика давления, датчика скорости, главного клапана, пропорционального клапана, блока секционных клапанов, блока управляемых форсунок, сервера мониторинга, подсветки. Головное устройство электрическим кабелем по интерфейсу CAN или RS232 соединено с антенно-фидерным комплектом и блоком управления, а блок управления электрическим кабелем по интерфейсу CAN или RS232 соединен с расходомером, датчиком давления, датчиком скорости, главным клапаном, пропорциональным клапаном, блоком секционных клапанов и блоком управляемых форсунок. Расходомер соединен с блоком секционных клапанов и пропорциональным клапаном, а датчик давления соединен с блоком секционных клапанов. Сервер мониторинга соединен с головным устройством по беспроводному каналу связи. Система обеспечивает повышение точности контроля за расходованием жидкого химического состава в опрыскивателе. 9 з.п. ф-лы,1 ил.
1. Система управления опрыскивателя, предназначенного для внесения гербицидов, пестицидов, фунгицидов, минеральных удобрений, состоящая из головного устройства с устройством буферизации, выполненным с возможностью измерения потока жидкости, подаваемого в штангу опрыскивателя, датчика давления, выполненного с возможностью измерения давления жидкости в опрыскивателе, датчика скорости, главного клапана, выполненного с возможностью включения/выключения потока жидкости в опрыскивателе, пропорционального клапана, выполненного с возможностью регулирования потока жидкости в опрыскивателе, блока секционных клапанов, выполненного с возможностью включения/отключения потока жидкости в отдельных секциях опрыскивателя, блока управляемых форсунок, выполненного с возможностью включения/отключения потока жидкости на отдельные форсунки опрыскивателя, сервера мониторинга, выполненного с возможностью сбора и хранения информации о работе системы управления опрыскивателем, подсветки, причем головное устройство электрическим кабелем по интерфейсу CAN или RS232 соединено с антенно-фидерным комплектом и блоком управления, а блок управления электрическим кабелем по интерфейсу CAN или RS232 соединен с расходомером, датчиком давления, датчиком скорости, главным клапаном, пропорциональным клапаном, блоком секционных клапанов и блоком управляемых форсунок, расходомер соединен с блоком секционных клапанов и пропорциональным клапаном, а датчик давления соединен с блоком секционных клапанов, причем сервер мониторинга соединен с головным устройством по беспроводному каналу связи.
2. Система управления опрыскивателем по п. 1, отличающаяся тем, что головное устройство выполнено в виде портативного электронно-вычислительного устройства, оснащенного сенсорным экранным модулем, интерфейсами подключения и элементами звуковой и световой индикации.
3. Система управления опрыскивателем по п. 1, отличающаяся тем, что антенно-фидерный комплект выполнен в виде GPS/GLONASS антенны в форме гриба с высокочастотным кабелем.
4. Система управления опрыскивателем по п. 1, отличающаяся тем, что расходомер выполнен в виде участка трубы с установленным в нем датчиком.
5. Система управления опрыскивателем по п. 1, отличающаяся тем, что датчик давления представляет собой измерительное устройство цилиндрической формы с резьбой и чувствительным элементом на конце.
6. Система управления опрыскивателем по п. 1, отличающаяся тем, что датчик скорости выполнен в виде измерительного устройства прямоугольной или цилиндрической формы, реагирующего на приближение к нему металлических предметов.
7. Система управления опрыскивателем по п. 1, отличающаяся тем, что главный клапан выполнен в виде трехходового электромагнитного клапана.
8. Система управления опрыскивателем по п. 1, отличающаяся тем, что пропорциональный клапан выполнен в виде трехходового электромагнитного клапана.
9. Система управления опрыскивателем по п. 1, отличающаяся тем, что блок секционных клапанов представляет собой набор трехходовых электромагнитных клапанов.
10. Система управления опрыскивателем по п. 1, отличающаяся тем, что блок управляемых форсунок представляет собой набор малогабаритных двухходовых электромагнитных клапанов, разнесенных вдоль крайних секций штанги опрыскивателя.
| Полевой опрыскиватель для автоматического регулирования технологического процесса внесения жидких минеральных удобрений | 2015 |
|
RU2629784C2 |
| Эмбриотом для крупных животных | 1930 |
|
SU27993A1 |
| Упряжь для лошадей | 1929 |
|
SU25043A1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО КОНТРОЛЯ И УПРАВЛЕНИЯ РАСХОДОМ РАБОЧЕЙ ЖИДКОСТИ В ШТАНГОВЫХ ОПРЫСКИВАТЕЛЯХ | 1991 |
|
RU2020818C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ РАСХОДОМ РАБОЧЕЙ ЖИДКОСТИ ПОЛЕВЫМИ ОПРЫСКИВАТЕЛЯМИ С КОРРЕКЦИЕЙ НА КОНЦЕНТРАЦИЮ РАСТВОРА | 1992 |
|
RU2048098C1 |
| US 4828177 A1, 09.05.1989 | |||
| US 5172861 A1, 22.12.1992. | |||

