Способ определения координат космического аппарата по сигналам навигационных спутников и устройство определения координат космического аппарата по сигналам навигационных спутников
Предлагаемое изобретение относится к навигации космического аппарата (КА) по сигналам навигационных спутников (НС), входящих в состав Глобальных Спутниковых Навигационных Систем (ГСНС), например, по сигналам НС ГЛОНАСС или GPS.
В настоящее время на многих КА установлена аппаратура спутниковой навигации (АСН), определяющая текущие координаты КА по сигналам НС, например, на американском сегменте Международной космической станции (АС МКС) установлена АСН SIGI, работающая по сигналам GPS, рассматриваемая в качестве аналога.
Известен способ - аналог определения координат КА по сигналам НС, включающий передачу радиосигналов от НС с известными параметрами орбиты в известные моменты времени, отслеживание радиосигналов приемными антеннами (Ан), установленными на КА, от i навигационных спутников, находящихся в полях зрения соответствующих приемных антенн, определение дальности di между HCi и КА по разности времен приема и излучения радиосигнала, определение координат КА по измеренным дальностям di и координатам  HCi в моменты измерений как координат точки, лежащей одновременно на n сферах радиуса di с центрами в точках
HCi в моменты измерений как координат точки, лежащей одновременно на n сферах радиуса di с центрами в точках  . Способ-аналог реализуется на АС МКС с помощью устройства АСН SIGI, включающего четыре антенны для приема сигналов НС GPS, формирующих СВЧ-сигналы, передаваемые НС GPS, которые по СВЧ-кабелю поступают в блок формирования дальностей и координат НС (БФДК НС), формирующие на выходе сигналы дальностей di от КА до НС и сигналы
. Способ-аналог реализуется на АС МКС с помощью устройства АСН SIGI, включающего четыре антенны для приема сигналов НС GPS, формирующих СВЧ-сигналы, передаваемые НС GPS, которые по СВЧ-кабелю поступают в блок формирования дальностей и координат НС (БФДК НС), формирующие на выходе сигналы дальностей di от КА до НС и сигналы  координат НС (i=1…n, где n - число НС, сигналы которых принимает Ан), поступающие в блоки определения координат КА (БОК КА), определяющие по дальностям di и координатам НС сигналы вектора координат КА, являющиеся выходами устройства-аналога АСН SIGI (см. например, Н.В. Михайлов. Автономная навигация космических аппаратов при помощи спутниковых радионавигационных систем. Политика, С-Петербург 2014, раздел 7.1).
координат НС (i=1…n, где n - число НС, сигналы которых принимает Ан), поступающие в блоки определения координат КА (БОК КА), определяющие по дальностям di и координатам НС сигналы вектора координат КА, являющиеся выходами устройства-аналога АСН SIGI (см. например, Н.В. Михайлов. Автономная навигация космических аппаратов при помощи спутниковых радионавигационных систем. Политика, С-Петербург 2014, раздел 7.1).
Система SIGI АС МКС включает четыре одинаковых контура Ан, БФДК, БОК КА. Так как антенны сильно затенены элементами конструкции МКС, и, в зависимости от ориентации МКС, ориентации солнечных батарей и тепловых радиаторов станции, от положения НС на небесной сфере в поле зрения антенн могут попадать разное количество НС, в результате на выходах БОК КА формируются разные векторы  . В бортовой вычислительной системе (БВС) МКС значения векторов проходят специальную обработку, результатом которой является гарантированное формирование осредненного вектора .
. В бортовой вычислительной системе (БВС) МКС значения векторов проходят специальную обработку, результатом которой является гарантированное формирование осредненного вектора .
Недостатком аналога является то, что оси визирования всех антенн SIGI параллельны друг другу и их суммарное поле зрения равно полю зрения одной антенны. Поэтому с точки зрения рассматриваемого способа и системы, реализующей этот способ, наличие четырех контуров формирования вектора  равносильны работе одного контура, так как все остальные контуры в точности повторяют работу первого контура. Ситуация меняется, когда антенны, установленные на внешней поверхности КА, направлены в различных направлениях. В этом случае в их поле зрения попадают разные НС и разное их количество, что существенно влияет на работу системы и ее качество.
равносильны работе одного контура, так как все остальные контуры в точности повторяют работу первого контура. Ситуация меняется, когда антенны, установленные на внешней поверхности КА, направлены в различных направлениях. В этом случае в их поле зрения попадают разные НС и разное их количество, что существенно влияет на работу системы и ее качество.
Однако, количество НС, попадающих в поле зрения каждой из Ан, существенно зависит от углового положения КА. Например, на Российском сегменте МКС поле зрения одной из Ан аппаратуры АСН-М при орбитальной ориентации МКС направлено в зенит. В этом случае в поле зрения обычно одновременно попадает от семи до двенадцати НС GPS, но при развороте, например, по крену на 90° число видимых НС сокращается до трех. При таком числе НС одномоментное определение координат МКС либо невозможно, либо осуществляется с большой ошибкой. Но на МКС имеются и другие Ан, развернутые на ~35° по крену относительно зенитной антенны. В поле зрения этой антенны при развороте МКС на 90° будут попадать от четырех до восьми НС. В АСН-М в такой ситуации определение орбиты будет выполняться по НС, попадающим в поле зрения этой Ан. При указанном числе НС вектор координат МКС может определяться по одномоментным измерениям, хотя и с меньшей точностью, чем в случае направления Ан в зенит. При большем угле разворота МКС по крену в поле зрения каждой из антенн будет попадать недостаточное число НС для определения вектора координат МКС. Кроме того, при переходе к измерениям от другой антенны меняются координаты Ан. А в АСН-М измеряемыми координатами КА являются координаты Ан, формирующего измерения, а не координаты центра масс КА, которые, вообще говоря, и являются координатами КА, так как во всех баллистических расчетах определяется именно движение центра масс КА. Несовпадение координат Ан с координатами центра масс КА вносит дополнительную ошибку в решение навигационной задачи.
Недостатком аналога является невозможность осуществлять измерения орбиты при угловых маневрах КА из-за уменьшения числа видимых НС в поле зрения каждой отдельной Ан, низкая точность измерений из-за уменьшения числа видимых НС и отклонений координат антенн АСН от центра масс (ЦМ) КА.
Недостаток способа аналога устранен в способе, принятом авторами за прототип (см. патент на изобретение №2654321 «Способ определения координат космического аппарата по сигналам навигационных спутников и устройство определения координат космического аппарата по сигналам навигационных спутников» М.В. Михайлов, С.Н. Рожков по заявке №2016129647 от 19 июля 2016 г. ), включающем передачу радиосигналов от навигационных спутников с известными параметрами орбиты в известные моменты времени, отслеживание радиосигналов от навигационных спутников приемными антеннами, установленными на космическом аппарате, от i навигационных спутников, находящихся в полях зрения соответствующих приемных антенн, определение дальности di между i навигационными спутниками и космическим аппаратом по разности времени приема и излучения радиосигнала, определение координат космического аппарата по измеренным дальностям и координатам  навигационных спутников в моменты измерений, как координаты точки, лежащей одновременно на n сферах радиуса di с центрами в точках
навигационных спутников в моменты измерений, как координаты точки, лежащей одновременно на n сферах радиуса di с центрами в точках  , определение векторов от центра масс космического аппарата до приемных антенн в связанной с космическим аппаратом системе координат, определение ориентации космического аппарата в гринвичской системе координат, определение векторов от центра масс космического аппарата до приемных антенн в гринвичской системе координат, определение проекций этих векторов на направления от космического аппарата на навигационные спутники, суммирование этих проекций с измеренными дальностями соответствующих приемных антенн, определение координат космического аппарата по полученным суммам.
, определение векторов от центра масс космического аппарата до приемных антенн в связанной с космическим аппаратом системе координат, определение ориентации космического аппарата в гринвичской системе координат, определение векторов от центра масс космического аппарата до приемных антенн в гринвичской системе координат, определение проекций этих векторов на направления от космического аппарата на навигационные спутники, суммирование этих проекций с измеренными дальностями соответствующих приемных антенн, определение координат космического аппарата по полученным суммам.
Недостаток устройства аналога устранен в устройстве, принятом авторами за прототип (см. патент на изобретение №2654321 «Способ определения координат космического аппарата по сигналам навигационных спутников и устройство определения координат космического аппарата по сигналам навигационных спутников» М.В. Михайлов, С.Н. Рожков по заявке №2016129647 от 19 июля 2016 г. ), включающем m приемных антенн, выходы которых подключены к соответствующим входам m блоков формирования дальностей и координат навигационных спутников, включающем блок определения координат космического аппарата, включающем блок ориентации и задатчик координат приемных антенн, выходы которых подключены к соответствующим входам преобразователя координат приемных антенн, выходы которого подключены к первым входам формирователя поправок дальностей, ко вторым входам которого подключены первые выходы блоков формирования дальностей и координат навигационных спутников, выходы формирователей поправок дальностей подключены к входам m сумматоров, ко вторым входам которых подключены вторые выходы блоков формирования дальностей и координат навигационных спутников, выходы сумматоров подключены к первым входам блока определения координат космического аппарата, ко вторым входам которого подключены первые выходы блоков формирования дальностей и координат навигационных спутников, выход блока определения координат космического аппарата является выходом устройства-прототипа.
По сути, решение-прототип осуществляет преобразование полей зрения всех приемных антенн, установленных в разных точках поверхности КА, в поле зрения одной приемной антенны, установленной в ЦМ КА, равное сумме полей зрения всех приемных антенн, а измерения всех приемных антенн приводятся к одной общей координате - ЦМ КА, что существенно повышает точность измерений.
Недостатком прототипа является малое суммарное число навигационных спутников, отслеживаемых приемными антеннами АСН, из-за того, что каждая из Ан отслеживает все НС, попадающие в ее поле зрения. Но поля зрения приемных антенн могут сильно пересекаться. В результате разные приемные антенны могут отслеживать одни и те же НС. Но число каналов, отслеживаемое каждой приемной антенной, ограничено. Например, в АСН-К кораблей «Союз МС» и «Прогресс МС» каждая приемная антенна может отслеживать сигналы только шести НС. Если эти шесть НС находятся в полях зрения всех приемных антенн, то всеми приемными антеннами будут отслеживаться только эти шесть НС. Как правило, измерения от шести НС дают большую ошибку в определении координат и скорости КА. То есть, недостаток способа и устройства прототипа обусловлен малым суммарным числом навигационных спутников, участвующих в решении навигационной задачи и, как следствие, низкой точностью определения координат.
Технический результат, достигаемый в предложенном решении, заключается в повышении точности определения координат КА за счет увеличения количества отслеживаемых НС благодаря отслеживанию каждого НС не более чем одной приемной антенной, находящегося на минимальном угловом расстоянии от оси приемных антенн, благодаря чему повышается точность каждого измерения.
Технический результат достигается тем, что в способе определения координат космического аппарата по сигналам навигационных спутников, включающем передачу радиосигналов от навигационных спутников с известными параметрами орбиты в известные моменты времени, отслеживание радиосигналов приемными антеннами, установленными на космическом аппарате, от i навигационных спутников, находящихся в полях зрения соответствующих приемных антенн, определение дальности di между i навигационными спутниками и космическим аппаратом по разности времени приема и излучения радиосигнала, определение координат космического аппарата по измеренным дальностям и координатам  навигационных спутников в моменты измерений, как координаты точки, лежащей одновременно на n сферах с центрами в точках
навигационных спутников в моменты измерений, как координаты точки, лежащей одновременно на n сферах с центрами в точках  , определение ориентации космического аппарата в гринвичской системе координат, определяют направления центральных осей приемных антенн в гринвичской системе координат, определяют углы между направлениями на навигационные спутники и осями приемных антенн, отслеживание радиосигналов от навигационных спутников выполняют той приемной антенной, для которой угол между направлением на навигационный спутник и осью приемной антенны минимален, отслеживание сигнала навигационного спутника выполняют до тех пор, пока углы между направлением на навигационный спутник и осями всех приемных антенн меньше заданного угла маски приемной антенны, определение координат выполняют с учетом всех отслеживаемых сигналов навигационных спутников.
, определение ориентации космического аппарата в гринвичской системе координат, определяют направления центральных осей приемных антенн в гринвичской системе координат, определяют углы между направлениями на навигационные спутники и осями приемных антенн, отслеживание радиосигналов от навигационных спутников выполняют той приемной антенной, для которой угол между направлением на навигационный спутник и осью приемной антенны минимален, отслеживание сигнала навигационного спутника выполняют до тех пор, пока углы между направлением на навигационный спутник и осями всех приемных антенн меньше заданного угла маски приемной антенны, определение координат выполняют с учетом всех отслеживаемых сигналов навигационных спутников.
Технический результат достигается тем, что в устройство определения координат космического аппарата по сигналам навигационных спутников, реализующее способ, включающее m приемных антенн, выходы которых подключены к соответствующим входам m блоков формирования дальностей и координат навигационных спутников, выходы которых подключены к соответствующим входам блока определения координат, блок определения ориентации космического аппарата, дополнительно вводят задатчик направления осей приемных антенн в связанной с космическим аппаратом системой координат, выход которого связан с первым входом преобразователя направлений осей приемных антенн, ко второму входу которого подключен выход блока определения ориентации, выход преобразователя направления осей приемных антенн подключен к первому входу определителя углов между осями приемных антенн и навигационными спутниками, ко второму входу которого подключены первые выходы блоков формирования дальностей и координат навигационных спутников, к третьему входу подключен выход блока определения координат, выход определителя углов между осями приемных антенн и навигационными спутниками подключен к первому входу блока разрешения отслеживания спутника, ко второму входу которого подключен выход задатчика углов маски приемных антенн, выходы которого подключены к входам соответствующих приемных антенн.
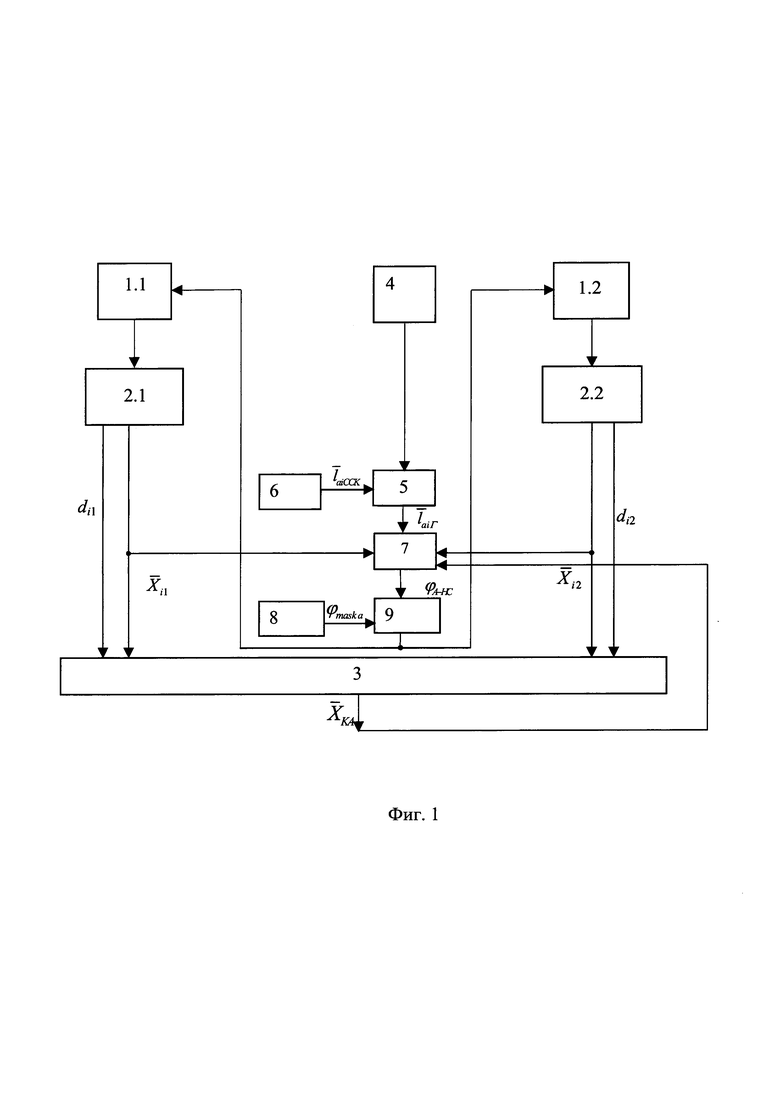
Суть изобретения поясняется фиг. 1, на которой приведена блок-схема предлагаемого устройства.
Для упрощения схемы на фиг. 1 представлен вариант АСН, включающий только два контура приемных антенн.
Устройство определения координат космического аппарата по сигналам навигационных спутников, реализующее предложенный способ (см. фиг. 1), включает в предлагаемом примере m=2 приемных антенн (Ан) 1.1, 1.2, выходы которых подключены к соответствующим входам m блоков формирования дальностей и координат (БФДК) навигационных спутников 2.1, 2.2, выходы которых подключены к соответствующим входам блока определения координат (БОК) космического аппарата 3, блок ориентации (БО) 4, в устройство введены преобразователь направлений осей приемных антенн (ПНОА) 5, задатчик направлений осей приемных антенн в связанной системе координат (ЗНОА) 6, определитель углов между осями приемных антенн и навигационными спутниками (ОУАС) 7, задатчик угла маски приемной антенны (ЗУМА) 8 и блок разрешения отслеживания спутника (БРОС) 9, при этом выход ЗНОА 6 связан с первым входом ПНОА 5, ко второму входу которого подключен выход БО 4, а выход ПНОА 5 подключен к первому входу ОУАС 7, ко второму входу которого подключены первые выходы БФДК 2, к третьему входу ОУАС 7 подключен выход БОК 3, выход ОУАС 7 подключен к первому входу БРОС 9, ко второму входу которого подключен выход ЗУМА 8, выход БРОС 9 подключен к входам Ан 1.
Поясним суть предлагаемых способа определения координат космического аппарата по сигналам навигационных спутников и устройства для его реализации.
Предлагаемый способ реализуется следующим образом. По измеренным дальностям dij от приемных антенн Aнj до навигационных спутников и соответствующим координатам  навигационных спутников определяют координаты космического аппарата
навигационных спутников определяют координаты космического аппарата  . По сформированной текущей матрице АГ-С перехода из гринвичской системы координат в связанную с КА систему координат и известным векторам направления осей приемных антенн КА в связанной системе координат определяют вектора направления осей приемных антенн КА в гринвичской системе координат. По векторам направления осей приемных антенн в ГСК, координатам КА и координатам навигационных спутников определяют углы между векторами направлений осей всех приемных антенн и векторами направлений от КА на навигационные спутники. Для каждой приемной антенны выбирают те НС, для которых угол между направлениями на них от КА и направлением оси приемной антенны минимален по сравнению с другими приемными антеннами. Выбранные НС назначают для отслеживания на приемную антенну. Назначенный НС отслеживается до тех пор, пока его угол не превысит угла маски приемной антенны. Если приемная антенна уже отслеживает НС, угол которого для нее не минимален, то она прекращает его отслеживать, и соответствующий приемный канал освобождается. В результате каждый НС отслеживается только одной приемной антенной. Определение координат КА выполняют по всем измерениям.
. По сформированной текущей матрице АГ-С перехода из гринвичской системы координат в связанную с КА систему координат и известным векторам направления осей приемных антенн КА в связанной системе координат определяют вектора направления осей приемных антенн КА в гринвичской системе координат. По векторам направления осей приемных антенн в ГСК, координатам КА и координатам навигационных спутников определяют углы между векторами направлений осей всех приемных антенн и векторами направлений от КА на навигационные спутники. Для каждой приемной антенны выбирают те НС, для которых угол между направлениями на них от КА и направлением оси приемной антенны минимален по сравнению с другими приемными антеннами. Выбранные НС назначают для отслеживания на приемную антенну. Назначенный НС отслеживается до тех пор, пока его угол не превысит угла маски приемной антенны. Если приемная антенна уже отслеживает НС, угол которого для нее не минимален, то она прекращает его отслеживать, и соответствующий приемный канал освобождается. В результате каждый НС отслеживается только одной приемной антенной. Определение координат КА выполняют по всем измерениям.
Предлагаемое устройство для m=2 включает приемные антенны 1.1, 1.2, отслеживающие сигналы навигационных спутников и формирующие СВЧ-сигналы, передаваемые по СВЧ-кабелям в два соответствующих блока формирования дальности и координат навигационных спутников БФДК НС 2.1, 2.2, формирующих на выходе сигналы дальностей dij от Анj, до HCij и сигналы координат  соответствующих НС, блок определения координат космического аппарата (БОК КА) 3, блок определения ориентации космического аппарата (БО) 4, формирует на выходе матрицу АГ-С перехода из гринвичской системы координат (ГСК) в связанную с КА систему координат (ССК), задатчик направления осей приемных антенн (ЗНОА) 6 формирует векторы
соответствующих НС, блок определения координат космического аппарата (БОК КА) 3, блок определения ориентации космического аппарата (БО) 4, формирует на выходе матрицу АГ-С перехода из гринвичской системы координат (ГСК) в связанную с КА систему координат (ССК), задатчик направления осей приемных антенн (ЗНОА) 6 формирует векторы  направлений осей приемных антенн в ССК. Эти векторы известны в ССК, но требуется преобразовывать их к гринвичской системе координат, в которой устройство определяет векторы направлений на НС. Преобразование выполняется путем умножения вектора
направлений осей приемных антенн в ССК. Эти векторы известны в ССК, но требуется преобразовывать их к гринвичской системе координат, в которой устройство определяет векторы направлений на НС. Преобразование выполняется путем умножения вектора  на матрицу Аг-с преобразования ГСК к ССК, формируемую блоком ориентации (БО) 4. Это умножение выполняется в ПНОА (5). Упрощенно ПНОА можно представить как блок умножения. На выходе ПНОА формируются векторы направления осей приемных антенн
на матрицу Аг-с преобразования ГСК к ССК, формируемую блоком ориентации (БО) 4. Это умножение выполняется в ПНОА (5). Упрощенно ПНОА можно представить как блок умножения. На выходе ПНОА формируются векторы направления осей приемных антенн  в ГСК. После определения векторов
в ГСК. После определения векторов  осуществляется распределение расположения НС относительно полей зрения приемных антенн Aнj. Для этого определяются углы между направлениями осей приемных антенн и навигационными спутниками. Направления на НС определяются как разность направлений на НС из центра Земли и направления на КА. Определяются приемная антенна и НС, для которых этот угол минимален из всех измеренных углов. Если угол найденного НС меньше угла маски ϕmask а, то БРОС 9 дает команду по назначению найденного НС на эту приемную антенну, и приемная антенна отслеживает НС до тех пор, пока БРОС не снимет разрешение на отслеживание. Если какая-то приемная антенна отслеживает НС, угол которого для данной приемной антенны не минимален, БРОС снимает разрешение на отслеживание этого НС данной приемной антенной. В результате каждая приемная антенна отслеживает не более одного НС, и общее число отслеживаемых НС может достигать максимального числа, равного произведению числа каналов каждой приемной антенны на число приемных антенн. Для кораблей "Союз МС" и "Прогресс МС" это число равно 24. То есть, после реализации настоящего предложения навигационная аппаратура АСН-К кораблей "Союз МС" и "Прогресс МС" будет определять вектор координат по измерениям до 24-х навигационных спутников, благодаря чему существенно повышается точность измерений при любой ориентации КА по сравнению с прототипом, когда на все 4 приемные антенны могут быть назначены только 6 одинаковых НС.
осуществляется распределение расположения НС относительно полей зрения приемных антенн Aнj. Для этого определяются углы между направлениями осей приемных антенн и навигационными спутниками. Направления на НС определяются как разность направлений на НС из центра Земли и направления на КА. Определяются приемная антенна и НС, для которых этот угол минимален из всех измеренных углов. Если угол найденного НС меньше угла маски ϕmask а, то БРОС 9 дает команду по назначению найденного НС на эту приемную антенну, и приемная антенна отслеживает НС до тех пор, пока БРОС не снимет разрешение на отслеживание. Если какая-то приемная антенна отслеживает НС, угол которого для данной приемной антенны не минимален, БРОС снимает разрешение на отслеживание этого НС данной приемной антенной. В результате каждая приемная антенна отслеживает не более одного НС, и общее число отслеживаемых НС может достигать максимального числа, равного произведению числа каналов каждой приемной антенны на число приемных антенн. Для кораблей "Союз МС" и "Прогресс МС" это число равно 24. То есть, после реализации настоящего предложения навигационная аппаратура АСН-К кораблей "Союз МС" и "Прогресс МС" будет определять вектор координат по измерениям до 24-х навигационных спутников, благодаря чему существенно повышается точность измерений при любой ориентации КА по сравнению с прототипом, когда на все 4 приемные антенны могут быть назначены только 6 одинаковых НС.
Список литературы
1. Глобальная Навигационная Спутниковая Система ГЛОНАСС ИКД ГЛОНАСС, Навигационный радиосигнал в диапазонах L1, L2, (редакция 5.1) М., 2008.
2. Н. В. Михайлов. Автономная навигация космических аппаратов при помощи спутниковых радионавигационных систем. Политехника, Санкт-Петербург 2014, раздел 7.1.
3. В.Н. Бранец, Е.А. Микрин, В.Н. Платонов, С.Н. Евдокимов, М.В. Михайлов, С.Н. Рожков, Р.Ф. Муртазин, Б.В. Шебшаевич, В. Пантер, Дж. Клабб «Навигационное обеспечение международной космической станции» Сборник трудов X Санкт-Петербургской международной конференции по интегрированным навигационным системам 2003, стр. 7.
4. Патент на изобретение №2654321 «Способ определения координат космического аппарата по сигналам навигационных спутников и устройство определения координат космического аппарата по сигналам навигационных спутников» М.В. Михайлов, С.Н. Рожков по заявке №2016129647 от 19 июля 2016 г.
Группа изобретений относится к способу и устройству определения координат космического аппарата по сигналам навигационных спутников. Для определения координат передают радиосигналы от навигационных спутников с известными параметрами орбиты в известные моменты времени, отслеживают их приемными антеннами на космическом аппарате, определяют дальности между навигационными спутниками и космическим аппаратом определенным образом, определяют координаты космического аппарата с учетом всех отслеживаемых сигналов навигационных спутников. Устройство содержит приемные антенны, блоки формирования дальностей и координат навигационных спутников, блок определения координат, блок определения ориентации космического аппарата, задатчик направления осей приемных антенн, преобразователь направлений осей приемных антенн, определитель углов между осями приемных антенн и навигационными спутниками, блок разрешения отслеживания спутника, задатчик углов маски приемных антенн, соединенные определенным образом. Обеспечивается повышение точности определения координат космического аппарата. 2 н.п. ф-лы, 1 ил. 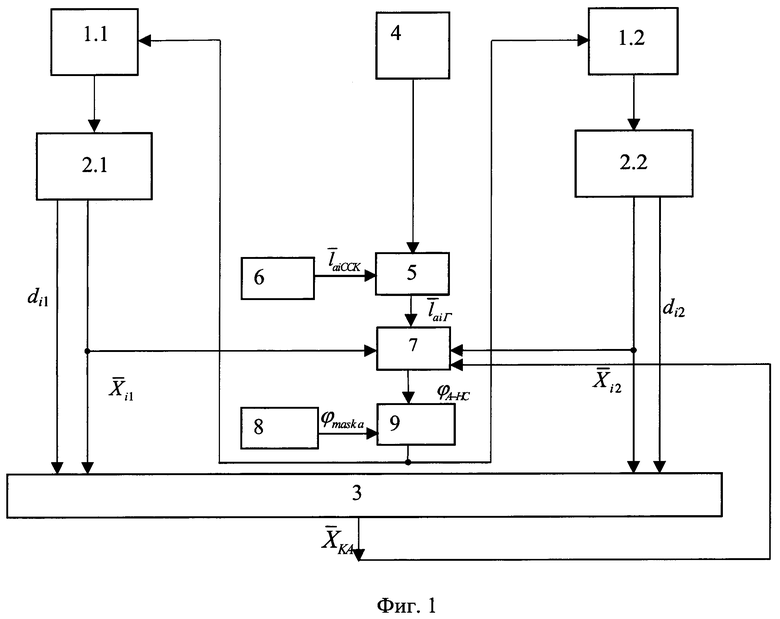
1. Способ определения координат космического аппарата по сигналам навигационных спутников, включающий передачу радиосигналов от навигационных спутников с известными параметрами орбиты в известные моменты времени, отслеживание радиосигналов приемными антеннами, установленными на космическом аппарате, от i навигационных спутников, находящихся в полях зрения соответствующих приемных антенн, определение дальности di между i навигационными спутниками и космическим аппаратом по разности времени приема и излучения радиосигнала, определение координат космического аппарата по измеренным дальностям и координатам  навигационных спутников в моменты измерений, как координаты точки, лежащей одновременно на n сферах с центрами в точках , определение ориентации космического аппарата в гринвичской системе координат, отличающийся тем, что определяют направления центральных осей приемных антенн в гринвичской системе координат, определяют углы между направлениями на навигационные спутники и осями приемных антенн, отслеживание радиосигналов от навигационных спутников выполняют той приемной антенной, для которой угол между направлением на навигационный спутник и осью приемной антенны минимален, отслеживание сигнала навигационного спутника выполняют до тех пор, пока углы между направлением на навигационный спутник и осями всех приемных антенн меньше заданного угла маски приемной антенны, определение координат выполняют с учетом всех отслеживаемых сигналов навигационных спутников.
навигационных спутников в моменты измерений, как координаты точки, лежащей одновременно на n сферах с центрами в точках , определение ориентации космического аппарата в гринвичской системе координат, отличающийся тем, что определяют направления центральных осей приемных антенн в гринвичской системе координат, определяют углы между направлениями на навигационные спутники и осями приемных антенн, отслеживание радиосигналов от навигационных спутников выполняют той приемной антенной, для которой угол между направлением на навигационный спутник и осью приемной антенны минимален, отслеживание сигнала навигационного спутника выполняют до тех пор, пока углы между направлением на навигационный спутник и осями всех приемных антенн меньше заданного угла маски приемной антенны, определение координат выполняют с учетом всех отслеживаемых сигналов навигационных спутников.
2. Устройство определения координат космического аппарата по сигналам навигационных спутников, реализующее способ по п. 1, включающее m приемных антенн, выходы которых подключены к соответствующим входам m блоков формирования дальностей и координат навигационных спутников, выходы которых подключены к соответствующим входам блока определения координат, блок определения ориентации космического аппарата, отличающееся тем, что в устройство дополнительно вводят задатчик направления осей приемных антенн в связанной с космическим аппаратом системой координат, выход которого связан с первым входом преобразователя направлений осей приемных антенн, ко второму входу которого подключен выход блока определения ориентации, выход преобразователя направления осей приемных антенн подключен к первому входу определителя углов между осями приемных антенн и навигационными спутниками, ко второму входу которого подключены первые выходы блоков формирования дальностей и координат навигационных спутников, к третьему входу подключен выход блока определения координат, выход определителя углов между осями приемных антенн и навигационными спутниками подключен к первому входу блока разрешения отслеживания спутника, ко второму входу которого подключен выход задатчика углов маски приемных антенн, выходы которого подключены к входам соответствующих приемных антенн.
| ДАЛЬНОМЕРНЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ И СОСТАВЛЯЮЩИХ ВЕКТОРА СКОРОСТИ ОБЪЕКТОВ ПО РАДИОСИГНАЛАМ КОСМИЧЕСКИХ АППАРАТОВ СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 1994 |
|
RU2115137C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ МЕСТОПОЛОЖЕНИЯ, СОСТАВЛЯЮЩИХ ВЕКТОРА СКОРОСТИ, ДАЛЬНОСТИ И ТРАЕКТОРНЫХ ИЗМЕРЕНИЙ НАВИГИРУЮЩИМСЯ ОБЪЕКТОМ ПО НАВИГАЦИОННЫМ РАДИОСИГНАЛАМ КОСМИЧЕСКИХ АППАРАТОВ СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 1998 |
|
RU2152048C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КУРСОВОГО УГЛА И КООРДИНАТ МЕСТОПОЛОЖЕНИЯ ОБЪЕКТОВ ПО РАДИОСИГНАЛАМ КОСМИЧЕСКИХ АППАРАТОВ СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 1994 |
|
RU2110077C1 |
| СПОСОБ УГЛОВОЙ ОРИЕНТАЦИИ ОБЪЕКТОВ ПО РАДИОНАВИГАЦИОННЫМ СИГНАЛАМ КОСМИЧЕСКИХ АППАРАТОВ (ВАРИАНТЫ) | 1997 |
|
RU2122217C1 |
| US 5331329 A1, 19.07.1994. | |||

