Предполагаемое изобретение относится к области навигации космических аппаратов (КА) по сигналам навигационных спутников (НС), входящих в состав Глобальных Спутниковых Навигационных систем (ГСНС), например, по сигналам НС ГЛОНАСС и/или GPS, для обеспечения определения ориентации КА.
В настоящее время на ряде КА установлена аппаратура спутниковой навигации (АСН), определяющая не только текущие координаты и скорость КА, но и его ориентацию. Например, на американском сегменте Международной Космической Станции (МКС) установлена АСН SIGI, работающая по сигналам спутников GPS и обеспечивающая определение как текущих координат, так и ориентации МКС. Способ определения ориентации по сигналам навигационных спутников, реализованный на американском сегменте МКС в системе SIGI, принят авторами в качестве способа-аналога. Этот способ определения ориентации КА по сигналам НС, включающий излучение радиосигналов от НС с известными параметрами орбиты, формирование и выдачу команд на прием сигналов выбранных навигационных спутников на каналы приемного устройства, установленного на космическом аппарате, выделение каждым каналом приемного устройства из суммарного сигнала всех навигационных спутников сигналов спутников, соответствующих выданным командам, и прием этих сигналов при условии нахождения соответствующих спутников в поле зрения одной из n антенн приемного устройства с известными единичными непараллельными векторами  направлений центральных осей антенн относительно связанной системы координат космического аппарата, определение текущих координат КА по принимаемым сигналам НС, определение единичных векторов
направлений центральных осей антенн относительно связанной системы координат космического аппарата, определение текущих координат КА по принимаемым сигналам НС, определение единичных векторов  направлений от КА на НС по координатам НС и КА, измерения интегральных фаз сигналов одного и того же НС, принятых i-й парой антенн, вектор которой
направлений от КА на НС по координатам НС и КА, измерения интегральных фаз сигналов одного и того же НС, принятых i-й парой антенн, вектор которой  в ССК определяется как разность координат
в ССК определяется как разность координат  и
и  i-й и j-й антенн, формирование сигналов разностей интегральных фаз, формирование сигналов целых частей разностей интегральных фаз по длине волны несущего сигнала λ0 путем округления сигнала разности интегральных фаз до ближайшего целого по длине волны λ0, формирование дробных частей разностей интегральных фаз по разности интегральных фаз и целой части разностей интегральных фаз, определение начальной матрицы ориентации с помощью датчиков ориентации, определение оценки сигналов разностей интегральных фаз по начальной матрице ориентации, координатам антенн в ССК и векторам направлений антенн
i-й и j-й антенн, формирование сигналов разностей интегральных фаз, формирование сигналов целых частей разностей интегральных фаз по длине волны несущего сигнала λ0 путем округления сигнала разности интегральных фаз до ближайшего целого по длине волны λ0, формирование дробных частей разностей интегральных фаз по разности интегральных фаз и целой части разностей интегральных фаз, определение начальной матрицы ориентации с помощью датчиков ориентации, определение оценки сигналов разностей интегральных фаз по начальной матрице ориентации, координатам антенн в ССК и векторам направлений антенн  от КА на НС, определение оценки сигналов целых частей разностей интегральных фаз по длине волны несущего сигнала λ0 путем округления оценки сигнала разности интегральных фаз до ближайшего целого по длине волны λ0, формирование измеренного значения разности интегральных фаз Uи путем суммирования сформированной оценки сигналов целых частей разностей интегральных фаз и соответствующих дробных частей измеренной разности интегральных фаз, определение по сформированным разностям интегральных фаз и направлениям
от КА на НС, определение оценки сигналов целых частей разностей интегральных фаз по длине волны несущего сигнала λ0 путем округления оценки сигнала разности интегральных фаз до ближайшего целого по длине волны λ0, формирование измеренного значения разности интегральных фаз Uи путем суммирования сформированной оценки сигналов целых частей разностей интегральных фаз и соответствующих дробных частей измеренной разности интегральных фаз, определение по сформированным разностям интегральных фаз и направлениям  от КА на НС в ГСК векторов пар антенн в ГСК по формуле:
от КА на НС в ГСК векторов пар антенн в ГСК по формуле:
где В - матрица, составленная из векторов направлений 
 - вектор, составленный из сформированных разностей интегральных фаз.
- вектор, составленный из сформированных разностей интегральных фаз.
Ориентацию КА в ГСК определяют в соответствии с матрицей ориентации АГ-С, формируемой по формуле:
где LC - матрица, составленная из векторов пар антенн  в ССК;
в ССК;
LГ - матрица, составленная из полученных векторов  этих же пар антенн в ГСК. (см., например, В.Д. Дишель, В.Л. Паластин. Методы навигации и ориентации геостационарных и высокоэллиптических космических аппаратов при использовании БИНС, корректируемой по кодовым и фазовым измерениям ГЛОНАСС/GPS. X Санкт-Петербургская международная конференция по интегрированным навигационным системам. СПб, «Электроприбор», 2003 г).
этих же пар антенн в ГСК. (см., например, В.Д. Дишель, В.Л. Паластин. Методы навигации и ориентации геостационарных и высокоэллиптических космических аппаратов при использовании БИНС, корректируемой по кодовым и фазовым измерениям ГЛОНАСС/GPS. X Санкт-Петербургская международная конференция по интегрированным навигационным системам. СПб, «Электроприбор», 2003 г).
Способ-аналог реализуется следующим образом. НС GPS излучают радиосигналы, несущая частота которых имеет определенную одинаковую для всех НС GPS длину волны λ0. Синусоидальный несущий сигнал промодулирован специальным модулирующим сигналом, несущим информацию о параметрах орбит НС и позволяющим определять координаты потребителя. Способ определения координат КА (потребителя) по сигналам НС описан, например, в работе [1] и реализуется во всех навигационных приемниках. Для вопроса определения ориентации КА детали способа определения его координат не существенны, хотя координаты КА используются и для реализации способа ориентации. Для определения ориентации сигнал одного и того же НС должен приниматься как минимум парой антенн, в общем случае n парами антенн, установленными на КА. Для каждой i-й пары антенн известны ее координаты  в ССК как разности координат
в ССК как разности координат  и
и  соответствующих антенн в ССК.
соответствующих антенн в ССК.
Недостатком способа-аналога является необходимость получения начальной информации об ориентации КА (начального приближения матрицы ориентации  ) от других систем. В условиях отсутствия начальной информации об ориентации КА может оказаться, что он повернут в пространстве таким образом, что в поле зрения антенн АСН не попадают НС, или число НС, попадающих в поле зрения антенн АСН, недостаточно для определения ориентации по сигналам НС.
) от других систем. В условиях отсутствия начальной информации об ориентации КА может оказаться, что он повернут в пространстве таким образом, что в поле зрения антенн АСН не попадают НС, или число НС, попадающих в поле зрения антенн АСН, недостаточно для определения ориентации по сигналам НС.
На американском сегменте МКС начальная оценка ориентации  формируется по данным ориентации российского сегмента, определяемой по звездным датчикам, после чего матрица ориентации американского сегмента МКС определяется по измерениям АСН SIGI автономно без использования данных российского сегмента Таким образом, для «запуска» режима ориентации по измерениям АСН SIGI в начальный момент требуется информация об ориентации от внешнего источника, что является существенным недостатком системы ориентации по измерениям АСН SIGI, так как в принципе от этого внешнего источника можно было бы получать матрицу ориентации непрерывно без использования АСН, что и реализуется на российском сегменте МКС. Другим недостатком аналога АСН SIGI является то, что центральные оси визирования всех антенн АСН установлены на МКС параллельно друг другу. Это ограничивает возможности по угловому маневру КА. Например, если КА развернули в пространстве таким образом, что оси антенн направлены на Землю, то в поле зрения антенн НС будут отсутствовать, и выполнить определение ориентации по измерениям АСН будет невозможно.
формируется по данным ориентации российского сегмента, определяемой по звездным датчикам, после чего матрица ориентации американского сегмента МКС определяется по измерениям АСН SIGI автономно без использования данных российского сегмента Таким образом, для «запуска» режима ориентации по измерениям АСН SIGI в начальный момент требуется информация об ориентации от внешнего источника, что является существенным недостатком системы ориентации по измерениям АСН SIGI, так как в принципе от этого внешнего источника можно было бы получать матрицу ориентации непрерывно без использования АСН, что и реализуется на российском сегменте МКС. Другим недостатком аналога АСН SIGI является то, что центральные оси визирования всех антенн АСН установлены на МКС параллельно друг другу. Это ограничивает возможности по угловому маневру КА. Например, если КА развернули в пространстве таким образом, что оси антенн направлены на Землю, то в поле зрения антенн НС будут отсутствовать, и выполнить определение ориентации по измерениям АСН будет невозможно.
Данный недостаток устранен в способе-прототипе, за который принят способ определения ориентации космического аппарата по сигналам навигационных спутников, реализованный на КА «Союз» и «Прогресс» по измерениям аппаратуры спутниковой навигации АСН-К (см. М.В. Михайлов Метод определения ориентации космических аппаратов по измерениям асинхронных приемников GPS-ГЛОНАСС. Вестник компьютерных и информационных технологий. М., Машиностроение, №6, 2009). На КА «Союз» и «Прогресс» центральные оси визирования антенн АСН установлены не параллельно друг другу, а под некоторыми углами, благодаря чему при любом угловом положении КА в поля зрения каких-то антенн всегда будут попадать те или иные НС.
Способ-прототип определения ориентации космического аппарата по сигналам навигационных спутников включает излучение радиосигналов от НС с известными параметрами орбиты, формирование и выдачу команд на прием сигналов выбранных навигационных спутников на каналы приемного устройства, установленного на космическом аппарате, выделение каждым каналом приемного устройства из суммарного сигнала всех навигационных спутников сигналов спутников, соответствующих выданным командам, и прием этих сигналов при условии нахождения соответствующих спутников в поле зрения одной из n антенн приемного устройства с известными единичными непараллельными векторами  направлений центральных осей антенн относительно связанной системы координат космического аппарата, определение текущих координат КА по принимаемым сигналам НС, определение единичных векторов
направлений центральных осей антенн относительно связанной системы координат космического аппарата, определение текущих координат КА по принимаемым сигналам НС, определение единичных векторов  направлений от КА на НС по координатам НС и КА, измерения интегральных фаз сигналов одного и того же НС, принятых i-й парой антенн, вектор которой
направлений от КА на НС по координатам НС и КА, измерения интегральных фаз сигналов одного и того же НС, принятых i-й парой антенн, вектор которой  в ССК определяется как разность координат
в ССК определяется как разность координат  и
и  i-й и j-й антенн, формирование сигналов разностей интегральных фаз, формирование сигналов целых частей разностей интегральных фаз по длине волны несущего сигнала λ0 путем округления сигнала разности интегральных фаз до ближайшего целого по длине волны λ0, формирование дробных частей разностей интегральных фаз по разности интегральных фаз и целой части разностей интегральных фаз, определение начальной матрицы ориентации с помощью датчиков ориентации, определение оценки сигналов разностей интегральных фаз по начальной матрице ориентации, координатам антенн в ССК и векторам направлений антенн
i-й и j-й антенн, формирование сигналов разностей интегральных фаз, формирование сигналов целых частей разностей интегральных фаз по длине волны несущего сигнала λ0 путем округления сигнала разности интегральных фаз до ближайшего целого по длине волны λ0, формирование дробных частей разностей интегральных фаз по разности интегральных фаз и целой части разностей интегральных фаз, определение начальной матрицы ориентации с помощью датчиков ориентации, определение оценки сигналов разностей интегральных фаз по начальной матрице ориентации, координатам антенн в ССК и векторам направлений антенн  от КА на НС, определение оценки сигналов целых частей разностей интегральных фаз по длине волны несущего сигнала λ0 путем округления оценки сигнала разности интегральных фаз до ближайшего целого по длине волны λ0, формирование измеренного значения разности интегральных фаз
от КА на НС, определение оценки сигналов целых частей разностей интегральных фаз по длине волны несущего сигнала λ0 путем округления оценки сигнала разности интегральных фаз до ближайшего целого по длине волны λ0, формирование измеренного значения разности интегральных фаз  путем суммирования сформированной оценки сигналов целых частей разностей интегральных фаз и соответствующих дробных частей измеренной разности интегральных фаз, определение по сформированным разностям интегральных фаз и направлениям
путем суммирования сформированной оценки сигналов целых частей разностей интегральных фаз и соответствующих дробных частей измеренной разности интегральных фаз, определение по сформированным разностям интегральных фаз и направлениям  на КА в ГСК векторов пар антенн в ГСК по формуле:
на КА в ГСК векторов пар антенн в ГСК по формуле:
где В - матрица, составленная из векторов направлений 
 - вектор, составленный из сформированных разностей интегральных фаз.
- вектор, составленный из сформированных разностей интегральных фаз.
Ориентацию КА в ГСК определяют в соответствии с матрицей ориентации АГ-С, формируемой по формуле:
где LC - матрица, составленная из векторов пар антенн  в ССК;
в ССК;
LГ - матрица, составленная из полученных векторов  этих же пар антенн в ГСК.
этих же пар антенн в ГСК.
Способ-прототип реализуется следующим образом. НС GPS излучают радиосигналы, несущая частота которых имеет определенную одинаковую для всех НС GPS длину волны λ0. Синусоидальный несущий сигнал промодулирован специальным модулирующим сигналом, несущим информацию о параметрах орбит НС и позволяющим определять координаты потребителя. Способ определения координат КА (потребителя) по сигналам НС описан, например, в работе [1] и реализуется во всех навигационных приемниках. Для вопроса определения ориентации КА детали способа определения его координат не существенны, хотя координаты КА используются и для реализации способа ориентации. Для определения ориентации сигнал одного и того же НС должен приниматься как минимум парой антенн, в общем случае n парами антенн, установленными на КА. Для каждой i-й пары антенн известны ее координаты  в ССК как разности координат
в ССК как разности координат  и
и  соответствующих антенн в ССК.
соответствующих антенн в ССК.
Каждая антенна может принимать сигналы нескольких НС при двух условиях: в приемном устройстве сформирована и выдана команда на прием сигнала данного НС данной антенной, т.е. приемное устройство осуществляет поиск сигнала НС с заданным номером в суммарном радиосигнале, принимаемом данной антенной; данный НС физически находится в поле зрения данной антенны и его сигнал может быть найден в суммарном радиосигнале, принимаемом данной антенной. Принимая сигналы одного и того же НС парой антенн приемное устройство реализует фазовый метод определения ориентации КА, заключающийсяся в измерении интегральных фаз сигналов НС путем интегрирования фазы несущего сигнала, принимаемого антеннами пары, по которым формируют сигналы разностей интегральных фаз, содержащих некоторое неопределенное число N целых длин волн λ0 несущего сигнала и дробную часть фазы. Величина разности интегральной фазы пары антенн равна:
ΔL=N⋅λ0+Δλ0,
где λ0 - длина волны несущего сигнала (~19 см);
Δλ0 - дробная часть, величина которой находится в диапазоне:
-0,5λ0<Δλ0<0,5λ0;
N⋅λ0 - целая часть разности интегральной фазы.
Так как каждая антенная пара начинает принимать сигнал одного и того же НС в разные моменты времени, то число целых длин волн N в формируемой разности интегральных фаз может быть произвольным и не отвечает геометрии расположения НС и вектора пары антенн. В идеале, если бы сигнал НС начинал приниматься антенными парами синхронно, то разность интегральных фаз  была равна проекции вектора пары
была равна проекции вектора пары  на направление
на направление  на соответствующий НС, т.е. выполнялось бы равенство:
на соответствующий НС, т.е. выполнялось бы равенство:

где  - истинное число длин волн;
- истинное число длин волн;
 - вектор пары антенн в ГСК.
- вектор пары антенн в ГСК.
Оценку истинного числа длин волн  можно получить, если известно начальное приближение матрицы ориентации
можно получить, если известно начальное приближение матрицы ориентации  . Тогда можно определить оценку
. Тогда можно определить оценку  по формуле:
по формуле:

где  - известный вектор пары антенн в ССК.
- известный вектор пары антенн в ССК.
Оценка истинной разности интегральных фаз  будет равна:
будет равна:

Из-за наличия ошибки оценки матрицы ориентации  оценка
оценка  также будет иметь ошибку. Если ошибка ориентации мала и составляет 3-4°, то ошибка
также будет иметь ошибку. Если ошибка ориентации мала и составляет 3-4°, то ошибка  не превышает полдлины волны. В этом случае целое число длин волн, содержащееся в
не превышает полдлины волны. В этом случае целое число длин волн, содержащееся в  , соответствует истинному целому числу длин волн, а ошибка содержится в дробной части
, соответствует истинному целому числу длин волн, а ошибка содержится в дробной части  . Измеренная величина разности интегральной фазы ΔL наоборот, имеет правильное значение дробной части и ошибочное значение целой части. Поэтому, взяв целую часть разности интегральной фазы из ее оценки ΔL*, а дробную часть из измеренной, получим измеренное значение разности интегральной фазы с правильным значением целой части ΔLизм, по которой определяются измеренные векторы пары антенн в ГСК
. Измеренная величина разности интегральной фазы ΔL наоборот, имеет правильное значение дробной части и ошибочное значение целой части. Поэтому, взяв целую часть разности интегральной фазы из ее оценки ΔL*, а дробную часть из измеренной, получим измеренное значение разности интегральной фазы с правильным значением целой части ΔLизм, по которой определяются измеренные векторы пары антенн в ГСК  , а по этим векторам определяется матрица ориентации АГ-С.
, а по этим векторам определяется матрица ориентации АГ-С.
Недостатком способа-прототипа является необходимость получения начальной информации об ориентации КА (начального приближения матрицы ориентации  ) от других систем. Однако, в отличие от способа-аналога, благодаря непараллельности центральных осей антенн АСН при любой ориентации КА в общее поле зрения антенн всегда попадает достаточное количество НС для решения задачи ориентации способом-прототипом. Непараллельность осей антенн обеспечивает также возможность определения ориентации только по измерениям АСН без использования информации от других систем. Эта возможность реализована в предлагаемом способе.
) от других систем. Однако, в отличие от способа-аналога, благодаря непараллельности центральных осей антенн АСН при любой ориентации КА в общее поле зрения антенн всегда попадает достаточное количество НС для решения задачи ориентации способом-прототипом. Непараллельность осей антенн обеспечивает также возможность определения ориентации только по измерениям АСН без использования информации от других систем. Эта возможность реализована в предлагаемом способе.
Технический результат заключается в реализации определения ориентации КА по измерениям АСН в условиях отсутствия измерений от других систем при произвольной неизвестной ориентации КА.
Технический результат достигается тем, что в способе определения ориентации космического аппарата по сигналам навигационных спутников, включающем излучение радиосигналов от навигационных спутников с известными параметрами орбиты, формирование и выдачу команд на прием сигналов выбранных навигационных спутников на каналы приемного устройства, установленного на космическом аппарате, выделение каждым каналом приемного устройства из суммарного сигнала всех навигационных спутников сигналов спутников, соответствующих выданным командам и прием этих сигналов при условии нахождения соответствующих спутников в поле зрения одной из n антенн приемного устройства с известными единичными непараллельными векторами  направлений центральных осей антенн относительно связанной системы координат космического аппарата, определение текущих координат космического аппарата по принимаемым сигналам навигационных спутников, измерение интегральных фаз ϕij одного и того же j-го навигационного спутника из общего созвездия навигационных спутников, видимых i-й парой антенн, вектор которой
направлений центральных осей антенн относительно связанной системы координат космического аппарата, определение текущих координат космического аппарата по принимаемым сигналам навигационных спутников, измерение интегральных фаз ϕij одного и того же j-го навигационного спутника из общего созвездия навигационных спутников, видимых i-й парой антенн, вектор которой  в связанной системе координат определяется как разность известных координат антенн i-й пары в связанной системе координат, определение единичных векторов
в связанной системе координат определяется как разность известных координат антенн i-й пары в связанной системе координат, определение единичных векторов  направлений от космического аппарата на навигационные спутники по координатам навигационных спутников и космического аппарата для общего созвездия навигационных спутников i-й пары антенн, в отличие от известного, стабилизируют космический аппарат в произвольной инерциальной системе координат, в моменты времени t1…tp…tm для каждой i-й пары антенн, для каждого j-го спутника i-й пары проводят серию измерений интегральных фаз ϕijp и для каждого измерения серии определяют векторы направлений
направлений от космического аппарата на навигационные спутники по координатам навигационных спутников и космического аппарата для общего созвездия навигационных спутников i-й пары антенн, в отличие от известного, стабилизируют космический аппарат в произвольной инерциальной системе координат, в моменты времени t1…tp…tm для каждой i-й пары антенн, для каждого j-го спутника i-й пары проводят серию измерений интегральных фаз ϕijp и для каждого измерения серии определяют векторы направлений  от космического аппарата на навигационные спутники общего созвездия для i-й пары антенн, для каждого измерения серии определяют векторы направлений
от космического аппарата на навигационные спутники общего созвездия для i-й пары антенн, для каждого измерения серии определяют векторы направлений  в гринвичской системе координат на момент первого измерения t1, для каждых двух соседних измерений серии, выполняемых в моменты времени tp и tp-1, для каждой i-й пары антенн, выбирают общее созвездие навигационных спутников и для этого общего созвездия формируют приращения измерений интегральных фазδϕijp как разность соответствующих интегральных фаз в моменты времени tp и tp-1, для общего созвездия соседних измерений для i-й пары антенн формируют приращения единичных векторов
в гринвичской системе координат на момент первого измерения t1, для каждых двух соседних измерений серии, выполняемых в моменты времени tp и tp-1, для каждой i-й пары антенн, выбирают общее созвездие навигационных спутников и для этого общего созвездия формируют приращения измерений интегральных фазδϕijp как разность соответствующих интегральных фаз в моменты времени tp и tp-1, для общего созвездия соседних измерений для i-й пары антенн формируют приращения единичных векторов  как разность соответствующих векторов направлений
как разность соответствующих векторов направлений  для моментов времени tp и tp-1, для каждой i-й пары антенн и каждого р-го измерения определяют матрицу приращений направлений δRip и вектор приращений фазовых сдвигов
для моментов времени tp и tp-1, для каждой i-й пары антенн и каждого р-го измерения определяют матрицу приращений направлений δRip и вектор приращений фазовых сдвигов  , для i-й пары антенн и каждого р-го измерения определяют накапливаемые матрицы и накапливаемый вектор р-го измерения, для i-й пары антенн и всех измерений серии определяют накопленную матрицу измерений Wi как сумму накапливаемых матриц каждого измерения, для всех измерений серии определяют накопленный вектор измерений
, для i-й пары антенн и каждого р-го измерения определяют накапливаемые матрицы и накапливаемый вектор р-го измерения, для i-й пары антенн и всех измерений серии определяют накопленную матрицу измерений Wi как сумму накапливаемых матриц каждого измерения, для всех измерений серии определяют накопленный вектор измерений  как сумму накапливаемых векторов каждого измерения, для всей серии измерений по накопленной матрице измерений и накопленному вектору измерений определяют вектор
как сумму накапливаемых векторов каждого измерения, для всей серии измерений по накопленной матрице измерений и накопленному вектору измерений определяют вектор  i-й пары антенн в гринвичской системе координат на момент первого измерения t1, по n векторам
i-й пары антенн в гринвичской системе координат на момент первого измерения t1, по n векторам  для n пар антенн в гринвичской системе координат на момент первого измерения t1 и известным векторам этих же n пар антенн
для n пар антенн в гринвичской системе координат на момент первого измерения t1 и известным векторам этих же n пар антенн  в связанной с космическим аппаратом системе координат определяют угловую ориентацию космического аппарата в текущей гринвичской системе координат на момент времени конца серии измерений tm по формуле:
в связанной с космическим аппаратом системе координат определяют угловую ориентацию космического аппарата в текущей гринвичской системе координат на момент времени конца серии измерений tm по формуле:

где Lc - матрица размерности 3×n, столбцами которой являются n векторов  n пар антенн в связанной системе координат;
n пар антенн в связанной системе координат;
 - матрица размерности 3×n, столбцами которой являются n векторов
- матрица размерности 3×n, столбцами которой являются n векторов  n пар антенн в гринвичской системе координат на момент t1 первого измерения серии.
n пар антенн в гринвичской системе координат на момент t1 первого измерения серии.
Суть изобретения поясняется графическими материалами, на которых приведены:
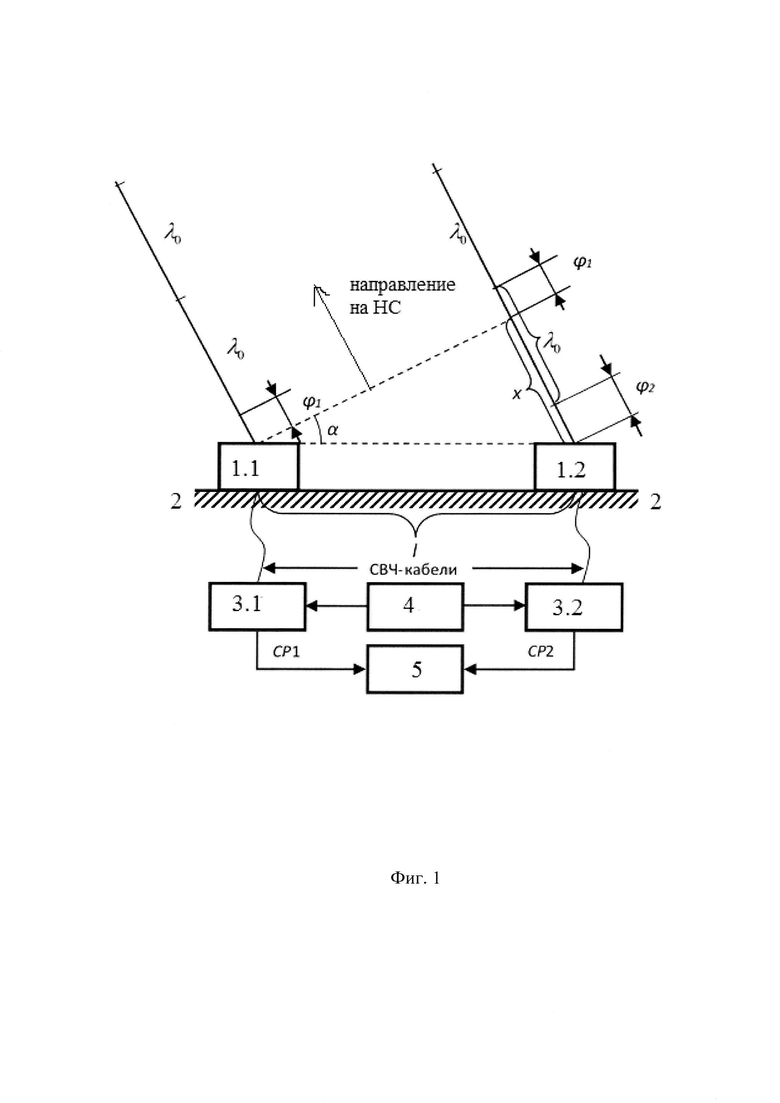
на фиг. 1 - демонстрация фазового метода определения ориентации по измерениям интегральных фаз сигналов НС;
на фиг. 2 - графики ошибок ориентации КА, определяемых предложенным методом фазовых приращений по результатам наземной обработки телеметрических данных АСН-К корабля «Союз МС», а также графики числа пар антенн, участвующих в измерениях.
Суть предлагаемого способа заключается в том, что НС GPS излучают радиосигналы, несущая частота которых имеет определенную одинаковую для всех НС GPS длину волны λ0. Синусоидальный несущий сигнал промодулирован специальным модулирующим сигналом, несущим информацию о параметрах орбит НС и позволяющим определять координаты потребителя. Способ определения координат КА (потребителя) по сигналам НС описан, например, в работе [1] и реализуется во всех навигационных приемниках. Для вопроса определения ориентации КА детали способа определения его координат не существенны, хотя координаты КА используются и для реализации способа ориентации. Для определения ориентации сигнал одного и того же НС должен приниматься как минимум парой антенн, в общем случае n парами антенн, установленными на КА. Для каждой i-й пары антенн известны ее координаты  в ССК как разности координат
в ССК как разности координат  и
и  соответствующих антенн в ССК.
соответствующих антенн в ССК.
Каждая антенна может принимать сигналы нескольких НС при двух условиях: в приемном устройстве сформирована и выдана команда на прием сигнала данного НС данной антенной, т.е. приемное устройство осуществляет поиск сигнала НС с заданным номером в суммарном радиосигнале, принимаемом данной антенной; данный НС физически находится в поле зрения данной антенны и его сигнал может быть найден в суммарном радиосигнале, принимаемом данной антенной. Принимая сигналы одного и того же НС парой антенн приемное устройство реализует фазовый метод определения ориентации КА, в плоском случае демонстрируемый фиг. 1, на которой изображены: две антенны АСН - 1.1 и 1.2, установленные на корпусе КА 2. СВЧ-сигнал от антенны 1.1 поступает в приемное устройство 3.1, от антенны 1.2 - в приемное устройство 3.2. Приемные устройства синхронизируются общим генератором частоты - 4 и формируют измерения интегральных фаз СР1 и СР2, поступающие в навигационный вычислитель - 5, где по измеренным значениям СР1 и СР2 определяется матрица ориентации. Демонстрируемый фигурой 1 метод заключается в измерении интегральных фаз сигналов НС путем интегрирования фазы несущего сигнала, принимаемого антеннами пары, по которым формируют сигналы разностей интегральных фаз, содержащих некоторое неопределенное число N целых длин волн λ0 несущего сигнала и дробную часть фазы. Величина разности интегральной фазы пары антенн равна:
ΔL=N⋅λ0+Δλ0,
где λ0 - длина волны несущего сигнала (~19 см);
Δλ0 - дробная часть, величина которой находится в диапазоне:
-0,5λ0<Δλ0<0,5λ0;
N⋅λ0 - целая часть разности интегральной фазы.
Так как каждая антенная пара начинает принимать сигнал одного и того же НС в разные моменты времени, то число целых длин волн N в формируемой разности интегральных фаз может быть произвольным и не отвечает геометрии расположения НС и вектора пары антенн. В идеале, если бы сигнал НС начинал приниматься антенными парами синхронно, то разность интегральных фаз была равна проекции вектора пары  на направление
на направление  на соответствующий НС, т.е. выполнялось бы равенство:
на соответствующий НС, т.е. выполнялось бы равенство:

где - истинное число длин волн;
 - вектор пары антенн в ГСК.
- вектор пары антенн в ГСК.
Оценку истинного числа длин волн  можно получить, если известно начальное приближение матрицы ориентации
можно получить, если известно начальное приближение матрицы ориентации  . Если начальное приближение матрицы ориентации
. Если начальное приближение матрицы ориентации  неизвестно, тогда для исключения необходимости раскрытия фазовой неопределенности стабилизируют КА в произвольной инерциальной системе координат, в моменты времени t1…tp…tm для каждой i-й пары антенн, для каждого j-го спутника i-й пары антенн проводят серию измерений интегральных фаз ϕijp и для каждого измерения серии определяют векторы направлений
неизвестно, тогда для исключения необходимости раскрытия фазовой неопределенности стабилизируют КА в произвольной инерциальной системе координат, в моменты времени t1…tp…tm для каждой i-й пары антенн, для каждого j-го спутника i-й пары антенн проводят серию измерений интегральных фаз ϕijp и для каждого измерения серии определяют векторы направлений  от КА на НС общего созвездия i-й пары антенн, для каждого измерения серии определяют векторы направлений
от КА на НС общего созвездия i-й пары антенн, для каждого измерения серии определяют векторы направлений  от КА на НС в гринвичской системе координат на момент первого измерения t1 по формуле:
от КА на НС в гринвичской системе координат на момент первого измерения t1 по формуле:
где  - матрица перехода от ГСК в момент t1 к ГСК в текущий момент tp;
- матрица перехода от ГСК в момент t1 к ГСК в текущий момент tp;
ωз - угловая скорость вращения Земли,
t - время от момента первого измерения t1, до текущего измерения tp, для каждых двух соседних измерений серии, выполняемых в моменты tp и tp-1, для каждой i-й пары антенн выбирают общее созвездие НС и для этого общего созвездия формируют приращения измерений интегральных фаз δϕijp как разности соответствующих интегральных фаз в моменты tp и tp-1, для общего созвездия соседних измерений для i-й пары антенн формируют приращения единичных векторов  как разность соответствующих векторов направления
как разность соответствующих векторов направления  для моментов времени tp и tp-1, для каждой i-й пары антенн и каждого р-го измерения определяют матрицу приращений направлений δRip и вектор приращений фазовых сдвигов
для моментов времени tp и tp-1, для каждой i-й пары антенн и каждого р-го измерения определяют матрицу приращений направлений δRip и вектор приращений фазовых сдвигов  по формулам:
по формулам:
для каждой i-й пары антенн и каждого р-го измерения определяют накапливаемую матрицу и накапливаемый вектор р-го измерения

для i-й пары антенн и всех измерений серии определяют накапливаемую матрицу Wi и накапливаемый вектор Pi как сумму соответствующих накапливаемых матриц и векторов всех измерений, для всей серии измерений по накопленной матрице измерений и накопленному вектору измерений определяют вектор  i-й пары антенн в гринвичской системе координат на момент первого измерения ti
i-й пары антенн в гринвичской системе координат на момент первого измерения ti
по n векторам  для n пар антенн в гринвичской системе координат на момент первого измерения t1 и известным вектором этих же n пар антенн
для n пар антенн в гринвичской системе координат на момент первого измерения t1 и известным вектором этих же n пар антенн  в связанной с космическим аппаратом системе координат определяют ориентацию космического аппарата в текущей гринвичской системе координат на момент времени конца серии измерений tm по формуле:
в связанной с космическим аппаратом системе координат определяют ориентацию космического аппарата в текущей гринвичской системе координат на момент времени конца серии измерений tm по формуле:
где Lc - матрица размерности 3×n, столбцами которой являются n векторов  n пар антенн в связанной системе координат;
n пар антенн в связанной системе координат;
 - матрица размерности 3×n, столбцами которой являются n векторов
- матрица размерности 3×n, столбцами которой являются n векторов  n пар антенн в гринвичской системе координат на момент t1 первого измерения серии.
n пар антенн в гринвичской системе координат на момент t1 первого измерения серии.
Для повышения точности определения ориентации требуется достаточно большой интервал времени измерений. Достигаемую точность и время сходимости решения демонстрирует фиг. 2, на которой приведен график ошибок ориентации, определяемый предложенным методом фазовых приращений по результатам наземной обработки телеметрических данных АСН-К кораблей «Союз МС». Из приведенных графиков следует, что решение сходится за ~20 мин, после чего ориентация непрерывно в реальном времени определяется с точностью ~3-4°. Такая точность не является высокой для решения многих задач КА, однако предложенный метод может использоваться для начального определения ориентации фазовым методом в котором, благодаря начальным данным вектора ориентации, исключается необходимость решения задачи раскрытия фазовой неопределенности. А точность определения ориентации будет составлять 0,5÷1 градус.
Список литературы
1. B.C. Шебшаевич, П.П. Дмитриев, Н.В. Иванцевич и др. Сетевые спутниковые радионавигационные системы. М., «Радио и связь», 1993 г.
2. В.Д. Дишель, В.Л. Паластин. Методы навигации и ориентации геостационарных и высокоэллиптических космических аппаратов при использовании БИНС, корректируемой по кодовым и фазовым измерениям ГЛОНАСС/GPS. X Санкт-Петербургская международная конференция по интегрированным навигационным системам. СПб, «Электроприбор», 2003 г.
3. М.В. Михайлов Метод определения ориентации космических аппаратов по измерениям асинхронных приемников GPS-ГЛОНАСС. Вестник компьютерных и информационных технологий. М., Машиностроение, №6, 2009 г.
4. М.В. Михайлов Определение ориентации космических аппаратов по измерениям асинхронных приемников GPS-ГЛОНАСС и датчиков угловой скорости. Космонавтика и ракетостроение. ЦНИИМАШ, 2009. №2(55).
5. Е.А. Микрин, М.В. Михайлов Ориентация перспективных кораблей "Союз" и "Прогресс" по измерениям асинхронных приемников GPS. Сб. трудов XV-й С-Петербургской международной конференции по интегрированным навигационным системам. СПб, ЦНИИ "Электроприбор", 2008.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ОРИЕНТАЦИИ КОСМИЧЕСКОГО АППАРАТА ПО СИГНАЛАМ НАВИГАЦИОННЫХ СПУТНИКОВ | 2016 |
|
RU2706638C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОРИЕНТАЦИИ КОСМИЧЕСКОГО АППАРАТА ПО СИГНАЛАМ НАВИГАЦИОННЫХ СПУТНИКОВ | 2020 |
|
RU2764935C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ КОСМИЧЕСКОГО АППАРАТА ПО СИГНАЛАМ НАВИГАЦИОННЫХ СПУТНИКОВ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ КОСМИЧЕСКОГО АППАРАТА ПО СИГНАЛАМ НАВИГАЦИОННЫХ СПУТНИКОВ | 2019 |
|
RU2712365C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ КОСМИЧЕСКОГО АППАРАТА ПО СИГНАЛАМ НАВИГАЦИОННЫХ СПУТНИКОВ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ КОСМИЧЕСКОГО АППАРАТА ПО СИГНАЛАМ НАВИГАЦИОННЫХ СПУТНИКОВ | 2016 |
|
RU2654321C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ КОСМИЧЕСКОГО АППАРАТА ПО СИГНАЛАМ НАВИГАЦИОННЫХ СПУТНИКОВ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ КОСМИЧЕСКОГО АППАРАТА ПО СИГНАЛАМ НАВИГАЦИОННЫХ СПУТНИКОВ | 2018 |
|
RU2706636C1 |
| СПОСОБ УГЛОВОЙ ОРИЕНТАЦИИ ОБЪЕКТА ПО СИГНАЛАМ СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 2010 |
|
RU2446410C1 |
| СПОСОБ ИНЕРЦИАЛЬНО-СПУТНИКОВОЙ НАВИГАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2013 |
|
RU2536768C1 |
| Способ и устройство определения угловой ориентации летательных аппаратов | 2020 |
|
RU2740606C1 |
| СИСТЕМА ВЫСОКОТОЧНОЙ АВТОМАТИЧЕСКОЙ ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2004 |
|
RU2287838C2 |
| КОМПЛЕКСНЫЙ СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2014 |
|
RU2558699C1 |

Предлагаемое изобретение относится к области навигации космических аппаратов (КА). Способ определения угловой ориентации КА по сигналам навигационных спутников (НС) включает излучение радиосигналов от НС с известными параметрами орбиты, формирование и выдачу команд на прием сигналов выбранных НС на каналы приемного устройства, установленного на КА, выделение каждым каналом приемного устройства из суммарного сигнала всех НС сигналов спутников, соответствующих выданным командам и прием этих сигналов при условии нахождения соответствующих спутников в поле зрения одной из n антенн приемного устройства с известными единичными непараллельными векторами направлений центральных осей антенн относительно связанной системы координат КА. Определение текущих координат КА по принимаемым сигналам НС, измерение интегральных фаз одного и того же j-го НС из общего созвездия спутников, видимых i-й парой антенн. При этом исключается необходимость раскрытия фазовой неопределенности за счет проведения серии фазовых измерений при стабилизации КА по приращениям интегральных фаз одних и тех же НС текущего созвездия i-й пары антенн. Ориентация определяется на момент первого измерения серии и преобразовывается к текущему моменту времени. Технический результат заключается в определении ориентации КА только по измерениям аппаратуры спутниковой навигации (АСН) без использования измерений от других систем при произвольной неизвестной ориентации КА. 2 ил.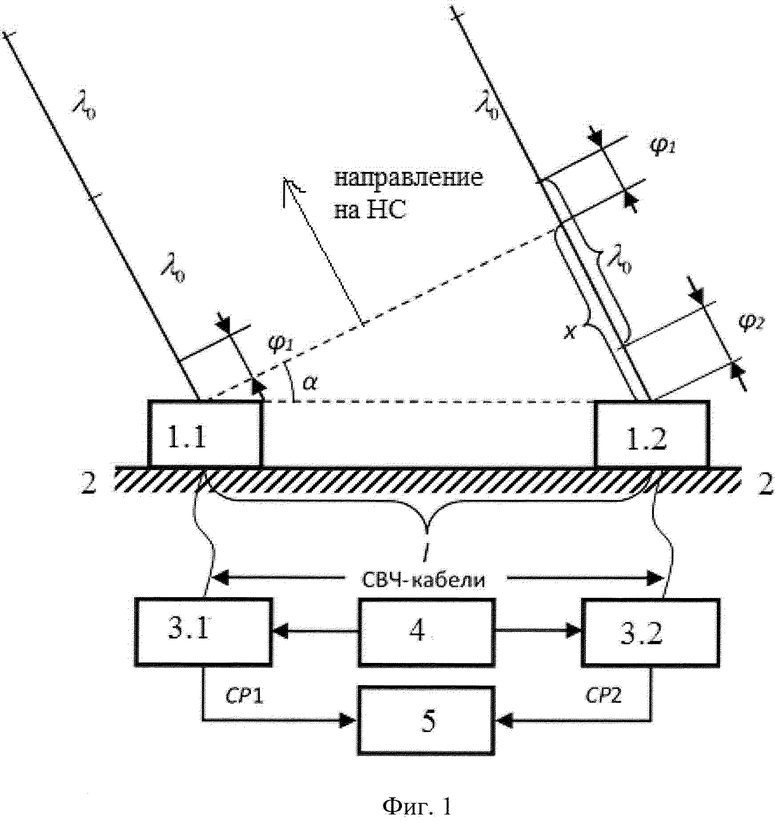
Способ определения ориентации космического аппарата по сигналам навигационных спутников, включающий излучение радиосигналов от навигационных спутников с известными параметрами орбиты, формирование и выдачу команд на прием сигналов выбранных навигационных спутников на каналы приемного устройства, установленного на космическом аппарате, выделение каждым каналом приемного устройства из суммарного сигнала всех навигационных спутников сигналов спутников, соответствующих выданным командам и прием этих сигналов при условии нахождения соответствующих спутников в поле зрения одной из n антенн приемного устройства с известными единичными непараллельными векторами  направлений центральных осей антенн относительно связанной системы координат космического аппарата, определение текущих координат космического аппарата по принимаемым сигналам навигационных спутников, измерение интегральных фаз ϕij одного и того же j-го навигационного спутника из общего созвездия навигационных спутников, видимых i-й парой антенн, вектор которой
направлений центральных осей антенн относительно связанной системы координат космического аппарата, определение текущих координат космического аппарата по принимаемым сигналам навигационных спутников, измерение интегральных фаз ϕij одного и того же j-го навигационного спутника из общего созвездия навигационных спутников, видимых i-й парой антенн, вектор которой  в связанной системе координат определяется как разность известных координат антенн i-й пары в связанной системе координат, определение единичных векторов
в связанной системе координат определяется как разность известных координат антенн i-й пары в связанной системе координат, определение единичных векторов  направлений от космического аппарата на навигационные спутники по координатам навигационных спутников и космического аппарата для общего созвездия навигационных спутников i-й пары антенн, отличающийся тем, что стабилизируют космический аппарат в произвольной инерциальной системе координат, в моменты времени t1…tp…tm для каждой i-й пары антенн, для каждого j-го спутника i-й пары проводят серию измерений интегральных фаз ϕijp и для каждого измерения серии определяют векторы направлений
направлений от космического аппарата на навигационные спутники по координатам навигационных спутников и космического аппарата для общего созвездия навигационных спутников i-й пары антенн, отличающийся тем, что стабилизируют космический аппарат в произвольной инерциальной системе координат, в моменты времени t1…tp…tm для каждой i-й пары антенн, для каждого j-го спутника i-й пары проводят серию измерений интегральных фаз ϕijp и для каждого измерения серии определяют векторы направлений  от космического аппарата на навигационные спутники общего созвездия для i-й пары антенн, для каждого измерения серии определяют векторы направлений
от космического аппарата на навигационные спутники общего созвездия для i-й пары антенн, для каждого измерения серии определяют векторы направлений  в гринвичской системе координат на момент первого измерения t1, для каждых двух соседних измерений серии, выполняемых в моменты времени tp и tp-1, для каждой i-й пары антенн, выбирают общее созвездие навигационных спутников и для этого общего созвездия формируют приращения измерений интегральных фаз δϕijp как разность соответствующих интегральных фаз в моменты времени tp и tp-1, для общего созвездия соседних измерений для i-й пары антенн формируют приращения единичных векторов
в гринвичской системе координат на момент первого измерения t1, для каждых двух соседних измерений серии, выполняемых в моменты времени tp и tp-1, для каждой i-й пары антенн, выбирают общее созвездие навигационных спутников и для этого общего созвездия формируют приращения измерений интегральных фаз δϕijp как разность соответствующих интегральных фаз в моменты времени tp и tp-1, для общего созвездия соседних измерений для i-й пары антенн формируют приращения единичных векторов  как разность соответствующих векторов направлений
как разность соответствующих векторов направлений  для моментов времени tp и tp-1, для каждой i-й пары антенн и каждого р-го измерения определяют матрицу приращений направлений δRip и вектор приращений фазовых сдвигов
для моментов времени tp и tp-1, для каждой i-й пары антенн и каждого р-го измерения определяют матрицу приращений направлений δRip и вектор приращений фазовых сдвигов  , для i-й пары антенн и каждого р-го измерения определяют накапливаемые матрицы и накапливаемый вектор р-го измерения, для i-й пары антенн и всех измерений серии определяют накопленную матрицу измерений Wi как сумму накапливаемых матриц каждого измерения, для всех измерений серии определяют накопленный вектор измерений
, для i-й пары антенн и каждого р-го измерения определяют накапливаемые матрицы и накапливаемый вектор р-го измерения, для i-й пары антенн и всех измерений серии определяют накопленную матрицу измерений Wi как сумму накапливаемых матриц каждого измерения, для всех измерений серии определяют накопленный вектор измерений  как сумму накапливаемых векторов каждого измерения, для всей серии измерений по накопленной матрице измерений и накопленному вектору измерений определяют вектор
как сумму накапливаемых векторов каждого измерения, для всей серии измерений по накопленной матрице измерений и накопленному вектору измерений определяют вектор  i-й пары антенн в гринвичской системе координат на момент первого измерения ti, по n векторам
i-й пары антенн в гринвичской системе координат на момент первого измерения ti, по n векторам  для n пар антенн в гринвичской системе координат на момент первого измерения t1 и известным векторам этих же n пар антенн
для n пар антенн в гринвичской системе координат на момент первого измерения t1 и известным векторам этих же n пар антенн  в связанной с космическим аппаратом системе координат определяют угловую ориентацию космического аппарата в текущей гринвичской системе координат на момент времени конца серии измерений tm по формуле:
в связанной с космическим аппаратом системе координат определяют угловую ориентацию космического аппарата в текущей гринвичской системе координат на момент времени конца серии измерений tm по формуле:

где Lc - матрица размерности 3×n, столбцами которой являются n векторов  n пар антенн в связанной системе координат;
n пар антенн в связанной системе координат;
 - матрица размерности 3×n, столбцами которой являются n векторов
- матрица размерности 3×n, столбцами которой являются n векторов  n пар антенн в гринвичской системе координат на момент t1 первого измерения серии.
n пар антенн в гринвичской системе координат на момент t1 первого измерения серии.
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ КОСМИЧЕСКОГО АППАРАТА ПО СИГНАЛАМ НАВИГАЦИОННЫХ СПУТНИКОВ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ КОСМИЧЕСКОГО АППАРАТА ПО СИГНАЛАМ НАВИГАЦИОННЫХ СПУТНИКОВ | 2016 |
|
RU2654321C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВОГО ПОЛОЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА ПО ДАННЫМ ПРИЕМНИКОВ СПУТНИКОВОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2008 |
|
RU2388008C1 |
| СПОСОБ ОРИЕНТАЦИИ И АВТОНОМНОЙ НАВИГАЦИИ КОСМИЧЕСКОГО АППАРАТА СИСТЕМЫ МОНИТОРИНГА ЗЕМЛИ И ОКОЛОЗЕМНОГО ПРОСТРАНСТВА | 2008 |
|
RU2376213C1 |
| СПОСОБ УГЛОВОЙ ОРИЕНТАЦИИ ОБЪЕКТА ПО СИГНАЛАМ СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ (ВАРИАНТЫ) | 2000 |
|
RU2185637C1 |
| US 7817087 B2, 19.10.2010. | |||

