ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится к способу и блоку управления для транспортного средства. В частности, описаны способ и блок управления для обнаружения и отслеживания объекта, находящегося в слепой зоне зеркала заднего вида.
УРОВЕНЬ ТЕХНИКИ
Вокруг транспортного средства имеются области, которые не видны водителю ни путём прямого наблюдения, ни опосредованно с помощью зеркала. Эти области иногда называют «слепыми зонами» водителя. Проблемы, связанные с обзором, особенно существенны в случае тяжёлых транспортных средств, таких как грузовики и, в частности, грузовики с прицепами.
Если водитель транспортного средства изменяет направление движения при нахождении объекта в такой слепой зоне, существует риск аварии.
Для решения этой проблемы были предприняты различные попытки, например путём добавления дополнительных зеркал или добавления датчиков, например, камер, обеспечивающих покрытие слепых зон. Однако добавление дополнительных зеркал и/или датчиков является дорогостоящим. Также затруднительна их удобная установка и представление информации о покрытии слепой зоны водителю в удобной форме. Кроме того, дополнительные внешние зеркала транспортного средства увеличивают аэродинамическое сопротивление и, следовательно, также повышают расход топлива.
Другое известное решение заключается в использовании широкоугольных зеркал/камер. Таким образом слепые зоны могут по меньшей мере частично покрываться, но, к сожалению, широкоугольные зеркала/камеры искажают перспективу. В связи с этим объекты, расположенные близко к широкоугольному зеркалу/камере, кажутся больше/ближе, чем они есть на самом деле, тогда как объекты, расположенные дальше, кажутся меньше/дальше, чем они есть на самом деле. Такой искаженный вид может путать или дезориентировать водителя, что может приводить к авариям из-за ненадлежащей реакции водителя на обнаруженные объекты.
Также известна замена традиционного зеркала заднего вида транспортного средства камерой и дисплеем. Преимущество этого заключается в том, что может быть уменьшено аэродинамическое сопротивление. Однако такая замена не решает вышеупомянутые проблемы слепых зон.
Документы DE202008006711, US20140333770, US20120062741 и US20080055411 описывают различные системы, в которых на зеркалах заднего вида (содержащих отражающие элементы) расположены камеры, причем камеры могут поворачиваться в различных направлениях.
Однако из-за добавления камер в дополнение к отражающим элементам возрастают затраты.
Документы US20050046696 и US20140176713 раскрывают камеру заднего вида на транспортном средстве, которая может поворачиваться. Однако, в них не рассмотрено, как может быть использована камера заднего вида для минимизации или уменьшения слепых зон водителя.
Следовательно, необходимо улучшение зеркал заднего вида транспортных средств для устранения проблем, связанных со слепыми зонами.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
В связи с этим задача настоящего изобретения заключается в решении по меньшей мере некоторых вышеупомянутых проблем и повышении дорожной безопасности.
В соответствии с первым аспектом изобретения эта задача решается путем обеспечения способа обнаружения и отслеживания объекта для транспортного средства. Способ содержит этап, на котором обнаруживают объект, находящийся за пределами обзора устройства, предназначенного для отображения объектов вне поля прямой видимости водителя, посредством датчика. Способ дополнительно содержит этап, на котором отслеживают обнаруженный объект путем регулировки датчика и вывода представления обнаруженного объекта посредством упомянутого устройства.
В соответствии со вторым аспектом изобретения эта задача решается путем обеспечения блока управления для транспортного средства. Блок управления направлен на обнаружение и отслеживание объекта. Блок управления выполнен с возможностью обнаружения объекта, находящегося за пределами обзора устройства, предназначенного для отображения объектов вне поля прямой видимости водителя, на основании сигналов, принимаемых от датчика. Блок управления также выполнен с возможностью формирования управляющих сигналов для отслеживания обнаруженного объекта с помощью датчика, а также формирования управляющих сигналов для вывода представления обнаруженного объекта посредством упомянутого устройства.
Благодаря описанным аспектам, за счет регулировки направления бокового датчика и, следовательно, вида, который водитель видит в устройстве отображения, предназначенном для отображения объектов вне поля прямой видимости водителя, устраняются проблемы, связанные с объектами, появляющимися вне текущего обзора устройства отображения. За счет перенаправления датчика без расширения угла обзора слепая зона водителя может быть наглядно представлена устройством отображения без искажения перспективы обзора. В связи с этим водителю легче правильно оценивать расстояние между собственным транспортным средством и обнаруженным объектом. Также за счет расширения угла обзора датчика может покрываться более широкая область, и ситуация, в которой множество объектов находится сзади и/ или сбоку от транспортного средства, может быть представлена водителю. Кроме того, настоящее решение может быть реализовано без добавления датчиков, помимо датчиков, уже обеспеченных на транспортном средстве для других целей. Следовательно, проблемы, связанные со слепыми зонами вокруг транспортного средства, могут быть устранены или по меньшей мере уменьшены без увеличения затрат на датчики. Таким образом, достигается повышение дорожной безопасности.
Другие преимущества и дополнительные новые признаки станут очевидными из следующего подробного описания.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Варианты выполнения изобретения далее будут подробно описаны со ссылкой на сопровождающие чертежи, на которых:
Фиг. 1 иллюстрирует транспортное средство в соответствии с вариантом выполнения изобретения;
Фиг. 2A иллюстрирует пример ситуации дорожного движения и вариант выполнения изобретения;
Фиг. 2B иллюстрирует пример ситуации дорожного движения и вариант выполнения изобретения;
Фиг. 2C иллюстрирует пример ситуации дорожного движения и вариант выполнения изобретения;
Фиг. 2D иллюстрирует пример ситуации дорожного движения и вариант выполнения изобретения;
Фиг. 3 иллюстрирует пример салона транспортного средства в соответствии с вариантом выполнения;
Фиг. 4 представляет собой блок-схему, иллюстрирующую вариант выполнения способа;
Фиг. 5 представляет собой иллюстрацию, изображающую систему в соответствии с вариантом выполнения.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Варианты выполнения изобретения, описанные в настоящем документе, определены как способ и блок управления, которые могут быть реализованы на практике в описанных ниже вариантах выполнения. Однако эти варианты выполнения могут быть проиллюстрированы и реализованы во множестве различных форм и не ограничиваются примерами, изложенными в настоящем документе; наоборот, эти иллюстративные примеры вариантов выполнения обеспечены, чтобы настоящее изобретение было исчерпывающим и полным.
Другие задачи и признаки могут стать очевидными из следующего далее подробного описания, приведенного в сочетании с сопровождающими чертежами. Однако следует понимать, что чертежи приведены исключительно в целях иллюстрации, а не определения объёма раскрытых в настоящем документе вариантов выполнения, для чего следует обратиться к приложенной формуле изобретения. Кроме того, чертежи не обязательно выполнены в масштабе, и, если не указано иное, они предназначены только для принципиальной иллюстрации конструкций и процедур, описанных в настоящем документе.
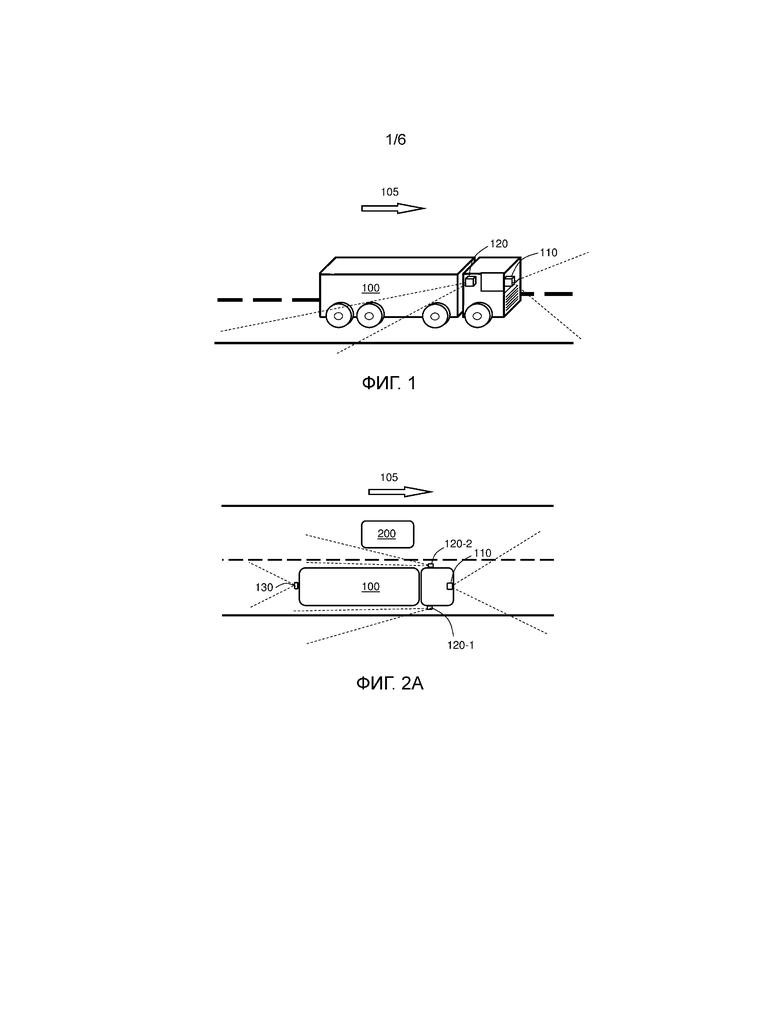
Фиг. 1 иллюстрирует ситуацию с участием транспортного средства 100. Транспортное средство 100 движется по дороге в направлении 105 движения.
Транспортное средство 100 может включать в себя, например, грузовой автомобиль, автобус или легковой автомобиль, или любое подобное транспортное средство, или другое средство передвижения.
В некоторых вариантах выполнения транспортное средство 100 может опционально содержать направленный вперед датчик 110. В проиллюстрированном варианте выполнения, который является лишь произвольным примером, направленный вперед датчик 110 может быть расположен, например, в передней части транспортного средства 100 за ветровым стеклом транспортного средства 100.
Установка направленного вперед датчика 110 за ветровым стеклом имеет некоторые преимущества по сравнению установленными снаружи системами камер. Эти преимущества включают в себя возможность использования стеклоочистителей ветрового стекла для очистки и использование света от передних фар для подсветки объектов в поле обзора камеры. Он также защищен от грязи, снега, дождя и в некоторой степени от повреждений, вандализма и/или кражи. Такой датчик 110 также может быть использован для множества других задач.
Опциональный датчик 110 может быть направлен к передней части транспортного средства 100 в направлении 105 движения. В различных вариантах выполнения датчик 110 может включать в себя, например, камеру, стереокамеру, инфракрасную камеру, видеокамеру, радиолокационный датчик, лидарный датчик, ультразвуковое устройство, времяпролетную камеру или подобное устройство.
Дополнительно транспортное средство 100 может содержать один или два датчика 120 бокового вида. Датчики 120 бокового вида могут быть расположены с левой/правой сторон транспортного средства 100 (относительно направления 105 движения) и выполнены с возможностью обнаружения объектов с соответствующей стороны транспортного средства 100. В различных вариантах выполнения датчик 120 бокового вида может включать в себя, например, камеру, стереокамеру, инфракрасную камеру, видеокамеру, радиолокационный датчик, лидарный датчик, ультразвуковое устройство, времяпролетную камеру или подобное устройство.
Вместо использования традиционных зеркал заднего вида на транспортном средстве 100 могут быть использованы датчики 120 бокового вида в сочетании с одним или более устройствами, предназначенными для отображения объектов вне поля прямой видимости водителя. Такое устройство отображения может включать в себя, например, дисплей, проектор, проекционный дисплей, прозрачный дисплей, являющийся частью ветрового стекла, «умные» очки водителя и т.д., которые выводят изображение или поток изображений, захваченных соответствующим датчиком 110, 120. Обычно датчик 120 с левой стороны транспортного средства 100 может быть связан с устройством отображения с левой стороны кабины, тогда как датчик с правой стороны транспортного средства 100 может быть связан с устройством отображения с правой стороны кабины, хотя возможны другие комбинации.
Однако такое устройство отображения, предназначенное для отображения объектов вне поля прямой видимости водителя, может в некоторых вариантах выполнения включать в себя отражающий элемент, например, представленный зеркалом (заднего вида).
Датчики 110, 120 могут поворачиваться и/или перенаправляться в различных направлениях, и устройства, предназначенные для отображения объектов вне поля прямой видимости водителя, могут представлять скорректированный обзор соответствующего датчика 110, 120.
В соответствии с некоторыми вариантами выполнения датчики 120 бокового вида могут направляться на основании информации, полученной датчиками 120, причем эта информация может быть проанализирована для определения того, как окружающие объекты движутся относительно транспортного средства 100. Таким образом, датчик 120 бокового вида может определять, например, появление другого транспортного средства на своем пути в слепой зоне водителя вокруг транспортного средства 100.
В связи с этим возможно использование датчиков 120 бокового вида/устройств отображения с нормальным углом обзора и отслеживание обнаруженного и идентифицированного объекта для минимизации или по меньшей мере снижения вероятности того, что водитель не обнаружит другое транспортное средство. В некоторых альтернативных вариантах выполнения, например, когда изменения направления не достаточно, угол обзора может быть изменен на более широкий угол.
В некоторых вариантах выполнения направленный вперед датчик 110 (который также может использоваться, например, для предупреждения о выезде за пределы полосы движения и т.д.) или другие датчики на транспортном средстве 100 могут быть использованы для идентификации объектов. Таким образом, также могут быть идентифицированы транспортные средства перед транспортным средством 100 и обгоняемые транспортные средства. Эта информация может быть использована для регулировки направления одного из боковых датчиков 120, когда это транспортное средство выходит за пределы текущего или установленного по умолчанию обзора устройства, предназначенного для отображения объектов вне поля прямой видимости водителя.
Кроме того, в соответствии с некоторыми вариантами выполнения несколько датчиков 110, 120, например, камер, могут быть направлены в одном направлении или на один и тот же объект. Таким образом, на основании различных сигналов от разных датчиков 110, 120 может быть создано трехмерное изображение, и могут быть идентифицированы неподвижные объекты. Затем датчики 110, 120 могут быть направлены в этом направлении в случае, если водитель находится на своей траектории движения в направление этого идентифицированного объекта. Это может быть полезно, например, при движении задним ходом или при парковке транспортного средства 100.
Кроме того, в некоторых вариантах выполнения обнаруженный объект вокруг транспортного средства 100 может быть обозначен на общем представлении, например, на дисплее в кабине или на любом из устройств отображения.
Преимущество настоящего решения заключается в том, что возможно использование датчика 110, 120 и устройства отображения, имеющих угол обзора, который не искажает перспективу при попытке исключения, уменьшения или минимизации слепых зон водителя вокруг транспортного средства 100. Кроме того, за счет использования уже существующих датчиков 110, 120 на транспортном средстве 100 может быть предотвращено увеличение затрат на дополнительные датчики. Таким образом, повышается дорожная безопасность.
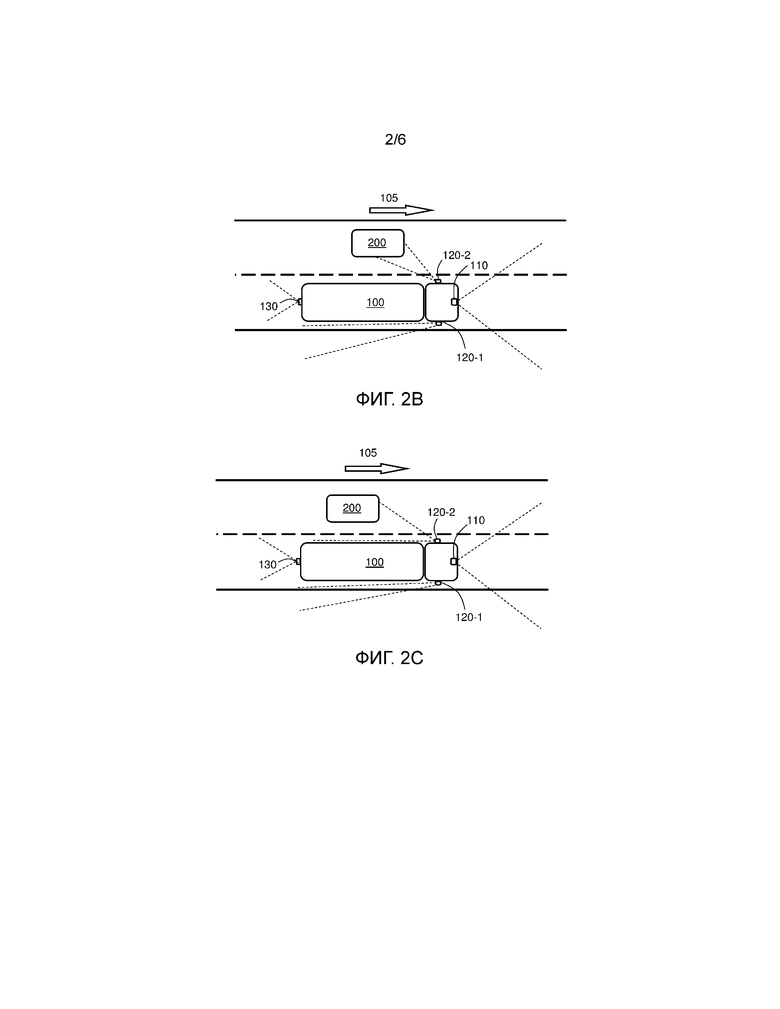
Фиг. 2A схематически иллюстрирует ситуацию, подобную рассмотренной выше ситуации, проиллюстрированной на Фиг. 1, но с транспортным средством 100, показанным сверху, и с изображенным объектом 200.
Объект 200 может представлять собой транспортное средство, человека, животное, фонарный столб или, например, любой мыслимый предмет.
При движении транспортного средства 100 в направлении 105 движения в проиллюстрированной ситуации направленный вперед датчик 110 может обнаруживать объект 200 при приближении транспортного средства 100 к объекту 200 сзади. В некоторых вариантах выполнения программа распознавания изображений может распознавать объект 200 и классифицировать его, например, как пешехода, легковой автомобиль, велосипедиста, животное, фонарный столб и т.д.; или как неподвижные/подвижные объекты 200, например.
В соответствии с некоторыми вариантами выполнения информация об обнаруженном и, по возможности, идентифицированном объекте 200 может быть впоследствии использована, также когда объект 200 больше не находится в пределах диапазона захвата направленного вперед датчика 110.
В других вариантах выполнения объект 200 может приближаться к транспортному средству 100 сзади и обгонять транспортное средство 100. В связи с этим для вышеописанного обнаружения и распознавания может быть использован датчик 130 заднего вида.
При движении транспортного средства 100 вперед в направлении 105 движения объект 200 попадает в слепую зону, где он не виден водителю ни непосредственно, ни с помощью направленного вперед датчика 110, ни с помощью датчика 120-2 бокового вида и соответствующего устройства отображения.
Следует отметить, что в некоторых вариантах выполнения транспортное средство 100 может иметь дополнительные датчики, например, камеру 130 заднего вида, которые могут использоваться с той же целью, что и направленный вперед датчик 110, при движении назад в некоторых вариантах выполнения.
Фиг. 2B иллюстрирует момент времени сразу после ситуации, проиллюстрированной на Фиг. 2A.
Датчик 120-2 бокового вида с левой стороны транспортного средства 100 в направлении 105 движения направленно отрегулирован для покрытия объекта 200, который находился за пределами текущего или установленного по умолчанию обзора устройства, предназначенного для отображения объектов 200 вне поля прямой видимости водителя, в ситуации, показанной на Фиг. 2A.
Установленный по умолчанию обзор датчика 120-2 бокового вида и соответствующего устройства может находиться в настраиваемом положении заднего вида.
Таким образом, обнаруженный объект 200 может отслеживаться отрегулированным датчиком 120-2, и представление обнаруженного объекта 200 может выводиться устройством отображения, связанным с датчиком 120-2.
Таким образом, водитель может быть осведомлен об объекте 200 с левой стороны транспортного средства 100 и может продолжать движение с учетом этого объекта. За счет сохранения такого же угла обзора датчика 120-2 и устройства отображения водителю легче оценивать расстояния до объекта 200 относительно транспортного средства 100.
Кроме того, в некоторых вариантах выполнения датчик 120-2 бокового вида и соответствующее устройство могут возвращаться к установленному по умолчанию обзору, например, когда обнаруженный объект 200 больше не находится сбоку от транспортного средства 100, и/или когда другой объект попадает в область с левой стороны транспортного средства 100.
Фиг. 2C иллюстрирует момент времени сразу после ситуации, проиллюстрированной на Фиг. 2A, альтернативной ситуации, проиллюстрированной на Фиг. 2B.
Датчик 120-2 бокового вида с левой стороны транспортного средства 100 отрегулирован для покрытия объекта 200, который находился в слепой зоне в ситуации, показанной на Фиг. 2A, путем регулировки угла обзора.
Таким образом, обнаруженный объект 200 может отслеживаться отрегулированным датчиком 120-2, и представление обнаруженного объекта 200 может выводиться устройством отображения, связанным с датчиком 120-2, имеющим такой же отрегулированный угол обзора.
В некоторых вариантах выполнения датчик 120-2 бокового вида и соответствующее устройство отображения могут возвращаться к установленному по умолчанию углу обзора, например, когда обнаруженный объект 200 больше не находится сбоку от транспортного средства 100.
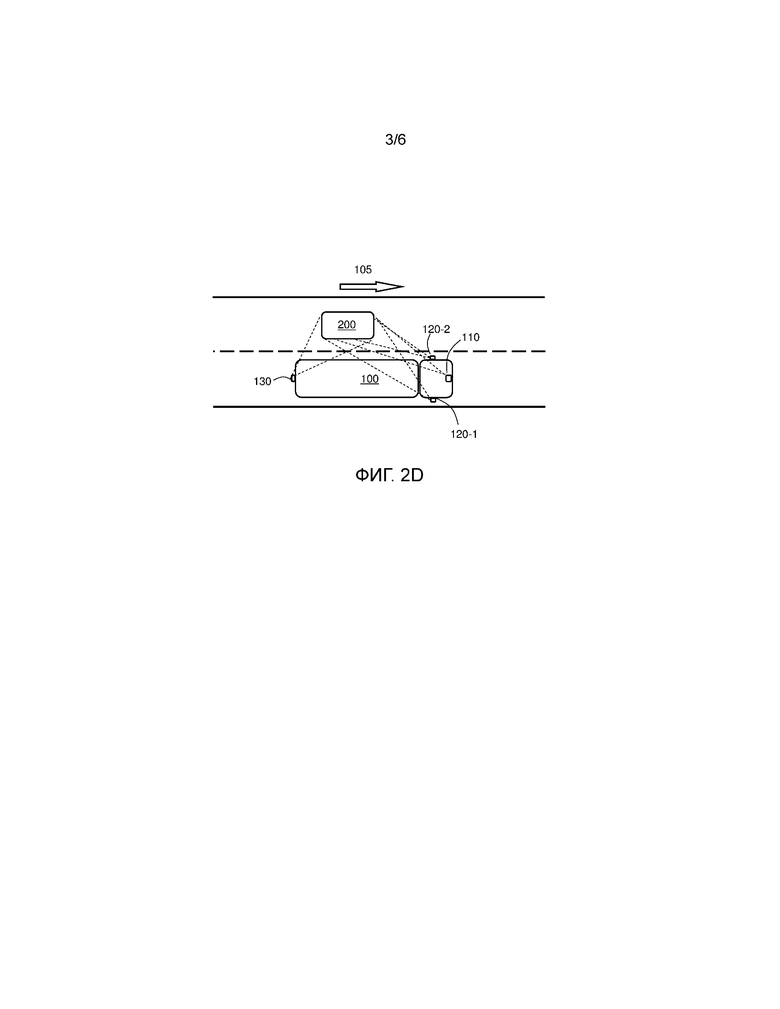
Фиг. 2D иллюстрирует еще одну ситуацию в соответствии с вариантом выполнения в момент времени после ситуации, проиллюстрированной на Фиг. 2A.
За счет направления множества датчиков 110, 120-1, 120-2, 130 на объект 200 одновременно или со сдвигом во времени может быть создано трехмерное (3D) изображение объекта 200, которое может быть выведено, например, посредством устройства отображения или на отдельном дисплее и т.д. в различных вариантах выполнения, например, при движении транспортного средства 100 в направлении нахождения объекта 200.
Это может обеспечивать преимущество, возможно, в частности, при навигации в узких помещениях, при парковке, при движении задним ходом и т.д., поскольку водителю может быть обеспечено улучшенное представление объекта 200.
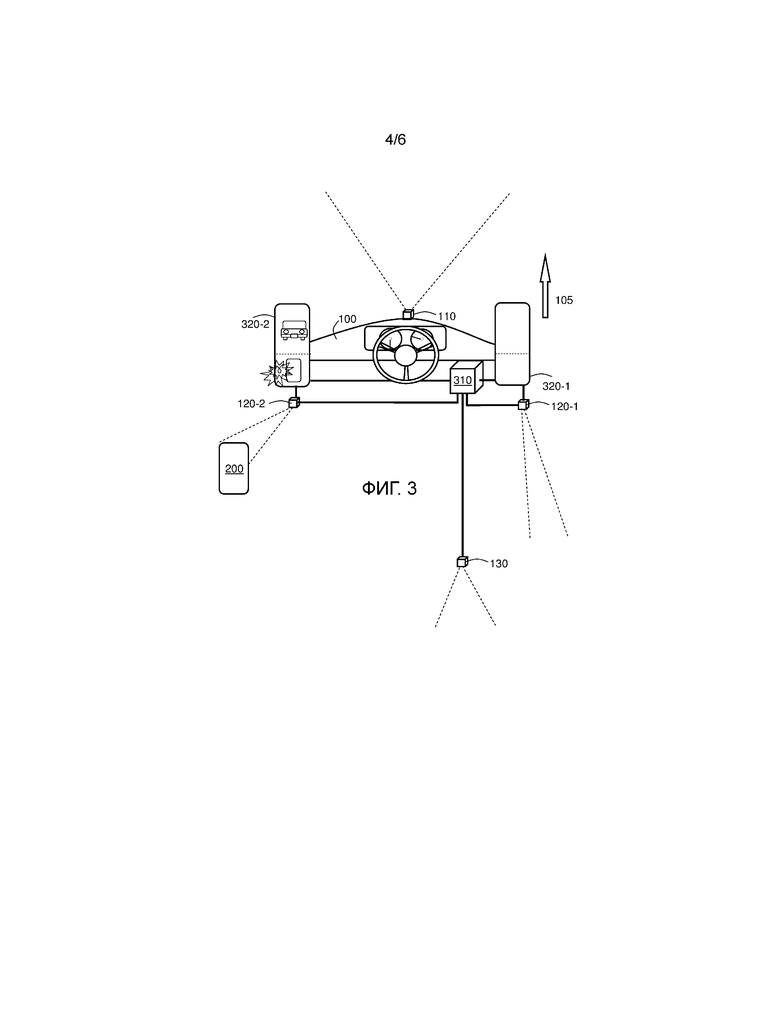
Фиг. 3 иллюстрирует пример салона транспортного средства 100 и показывает, как вышеописанная ситуация на Фиг. 1 и/или Фиг. 2A-2D, может восприниматься водителем транспортного средства 100.
Транспортное средство 100 содержит блок 310 управления, правое устройство 310-1, предназначенное для отображения объектов 200 вне поля прямой видимости водителя, находящихся с правой стороны транспортного средства 100, и левое устройство 310-2, предназначенное для отображения объектов 200 вне поля прямой видимости водителя, находящихся с левой стороны транспортного средства 100. Каждое такое устройство 310-1, 310-2 связано с соответствующим датчиком 120-1, 120-2, расположенным с соответствующей стороны транспортного средства 100. Датчики 120-1, 120-2 обычно могут включать в себя соответствующую (видео) камеру.
Однако в других вариантах выполнения транспортное средство 100 может содержать множество датчиков 120 с каждой стороны транспортного средства 100. Датчики 120 могут представлять собой датчики одного или разных типов, например, камеру, стереокамеру, инфракрасную камеру, видеокамеру, радиолокационный датчик, лидарный датчик, ультразвуковое устройство, времяпролетную камеру или подобное устройство.
Блок 310 управления выполнен с возможностью обнаружения объекта 200, находящегося за пределами «нормального», установленного по умолчанию или текущего обзора в левом устройстве 320-2 отображения, на основании сигналов, обеспечиваемых левым датчиком 120-2. Также блок 310 управления дополнительно выполнен с возможностью формирования управляющих сигналов для отслеживания обнаруженного объекта 200 путем регулировки датчика 120-2 и вывода представления обнаруженного объекта 200 посредством упомянутого устройства 320-2. В проиллюстрированном примере левый датчик 120-2 перенаправляется с «нормальной» или установленной по умолчанию области покрытия на область нахождения объекта 200. Затем вид с перенаправленного датчика 120-2 отображается на левом устройстве 320-2 отображения. Кроме того, в некоторых вариантах выполнения схематическая общая иллюстрация транспортного средства 100 и области, в которой находится объект 200, может выводиться на любом устройстве 320-1, 320-2 отображения в транспортном средстве 100, например, на левом устройстве 320-2 отображения. При этом внимание водителя обращается на то, что левое устройство 320-2 отображения имеет отрегулированную область покрытия по сравнению с установленной по умолчанию областью покрытия.
В других вариантах выполнения область покрытия левого устройства 320-2 отображения/левого датчика 120-2 может регулироваться путем регулировки угла обзора левого устройства 320-2 отображения/левого датчика 120-2. Обычно может быть применен более широкий угол обзора.
При перемещении объекта 200 относительно транспортного средства 100 блок 310 управления может отслеживать объект посредством левого устройства 320-2 отображения и соответствующего датчика 120-2.
В некоторых вариантах выполнения при обнаружении объекта 200 в слепой зоне водителя, когда устройства 320-1, 320-2 отображения/боковые датчики 120-1, 120-2 находятся в нормальном/установленном по умолчанию положении, помимо отслеживания объекта 200 с помощью упомянутых устройств 320-1, 320-2/боковых датчиков 120-1, 120-2, внимание водителя может быть привлечено звуковым сигналом, световым сигналом, тактильным сигналом и т.д.
Таким образом, вероятность аварии из-за появления объекта 200 в слепой зоне водителя снижается, поскольку водитель осведомлен об объекте 200 и его положении относительно транспортного средства 100.
В проиллюстрированном варианте выполнения транспортное средство 100 также содержит опциональный направленный вперед датчик 110, расположенный в передней части транспортного средства 100 за ветровым стеклом. Кроме того, в некоторых вариантах выполнения транспортное средство 100 может содержать камеру 130 заднего вида, расположенную в задней части транспортного средства 100, направленную в направлении, противоположном нормальному направлению 105 движения. Таким образом, может выполняться обнаружение объектов 200 сзади транспортного средства 100, например, при движении транспортного средства 100 задним ходом. В таком случае камера 110 может быть расположена внутри заднего стекла для защиты от грязи, снега, и т.д.
Блок 310 управления может осуществлять связь с датчиками 110, 120-1, 120-2, 130, например, по шине связи транспортного средства 100 или по проводному или беспроводному соединению.
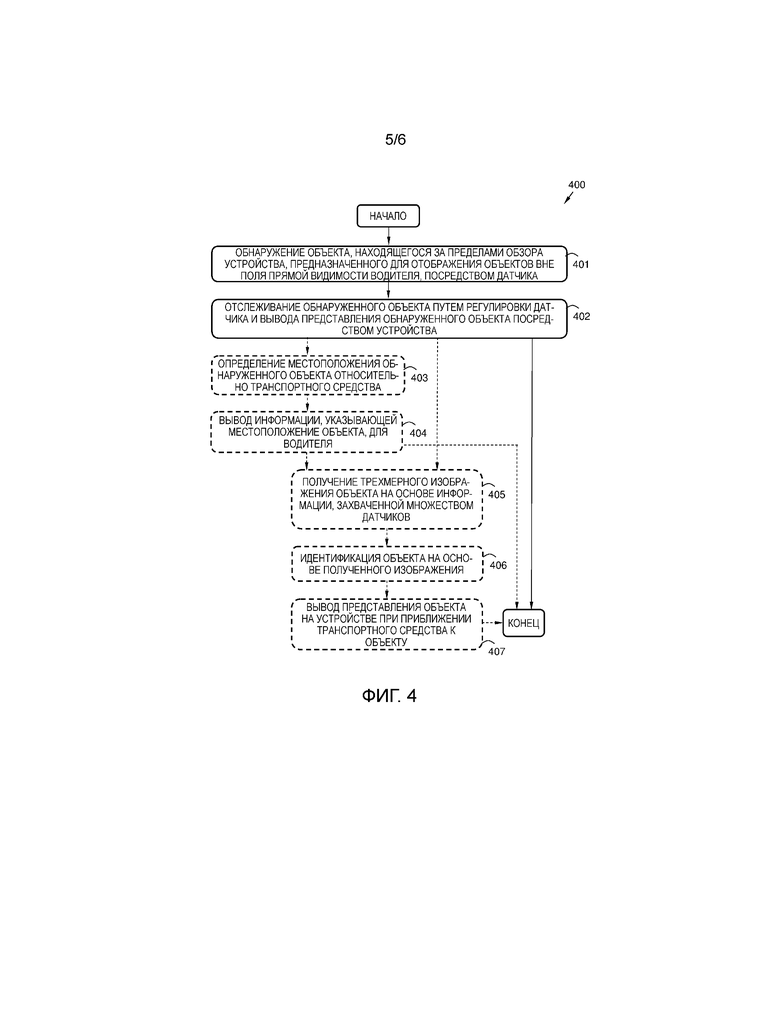
Фиг. 4 иллюстрирует пример способа 400 в соответствии с вариантом выполнения. Блок-схема на Фиг. 4 показывает способ 400 для использования в транспортном средстве 100. Способ 400 направлен на обнаружение и отслеживание объекта 200, находящегося за пределами установленного по умолчанию обзора устройства 320-1, 320-2 отображения, предназначенного для отображения объектов 200 вне поля прямой видимости водителя, например, в слепой зоне зеркала заднего вида транспортного средства 100.
Транспортное средство 100 может представлять собой, например, грузовой автомобиль, автобус, легковой автомобиль или подобное средство передвижения.
Транспортное средство 100 может содержать множество датчиков 110, 120-1, 120-2, 130, ориентируемых в направлении объекта 200 в некоторых вариантах выполнения одновременно, со сдвигом во времени или последовательно во времени.
Для корректного обнаружения и отслеживания объекта 200 способ 400 может содержать ряд этапов 401-407. Однако некоторые из этих этапов 401-407 могут выполняться различными альтернативными способами. Некоторые этапы способа могут выполняться только в некоторых опциональных вариантах выполнения; например, этапы 403-407. Кроме того, описанные этапы 401-407 могут выполняться в несколько ином хронологическом порядке, чем предлагает нумерация. Способ 400 может содержать следующие этапы:
Этап 401, на котором обнаруживают объект 200, находящийся за пределами установленного по умолчанию обзора устройства 320-1, 320-2, предназначенного для отображения объектов 200 вне поля прямой видимости водителя, посредством датчика 110, 120-1, 120-2, 130.
Этап 402, на котором отслеживают обнаруженный на этапе 401 объект 200 путем регулировки датчика 110, 120-1, 120-2, 130 и вывода представления обнаруженного объекта 200 посредством устройства 320-1, 320-2, предназначенного для отображения объектов 200 вне поля прямой видимости водителя.
В некоторых вариантах выполнения регулировка датчика 110, 120-1, 120-2, 130 может включать в себя поворот датчика 110, 120-1, 120-2, 130.
В некоторых вариантах выполнения регулировка датчика 110, 120-1, 120-2, 130 может включать в себя расширение угла обзора датчика 110, 120-1, 120-2, 130.
Этап 403, который может выполняться только в некоторых конкретных вариантах выполнения, и на котором определяют местоположение обнаруженного на этапе 401 объекта 200 относительно транспортного средства 100.
Этап 404, который может выполняться только в некоторых конкретных вариантах выполнения, в которых был выполнен этап 403, и на котором выводят информацию, указывающую определенное на этапе 403 местоположение обнаруженного на этапе 401 объекта 200, для водителя.
Этап 405, который может выполняться только в некоторых конкретных вариантах выполнения, и на котором создают трехмерное изображение объекта 200 на основании информации, захваченной множеством датчиков 110, 120-1, 120-2, 130.
Этап 406, который может выполняться только в некоторых конкретных вариантах выполнения, в которых был выполнен этап 405, и на котором идентифицируют объект 200 на основании созданного на этапе 405 изображения путем распознавания изображения.
Этап 407, который может выполняться только в некоторых конкретных вариантах выполнения, в которых были выполнены этап 405 и этап 406, и на котором выводят представление объекта 200 на упомянутом устройстве 320-1, 320-2 при приближении транспортного средства 100 к объекту 200.
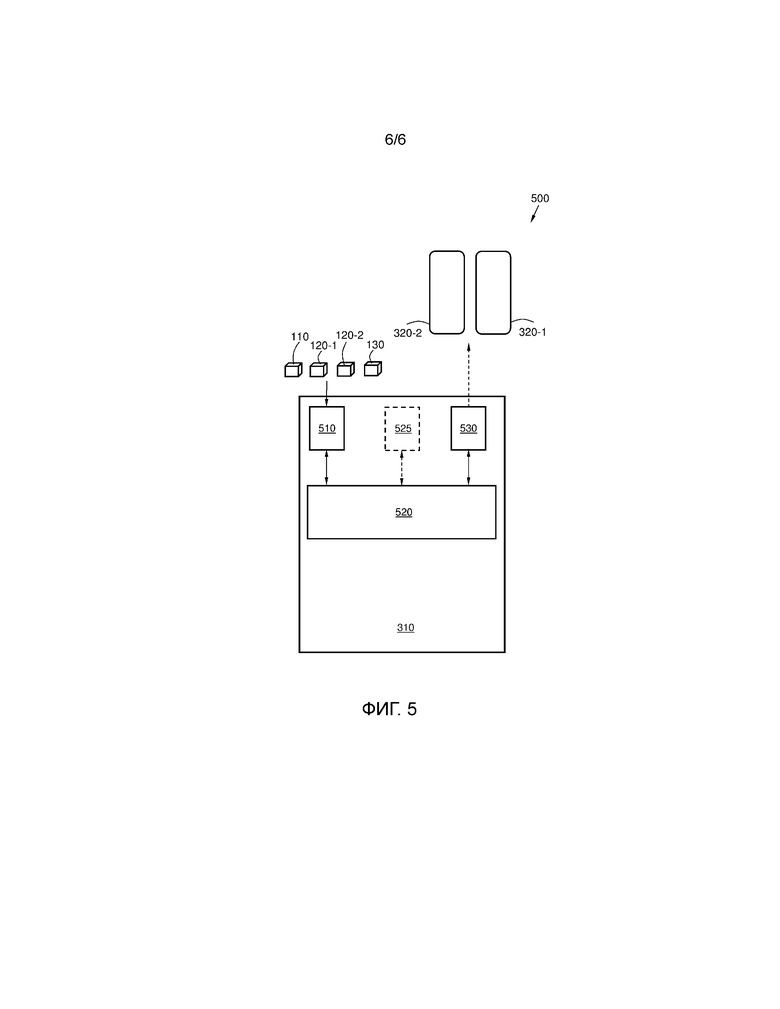
Фиг. 5 иллюстрирует вариант выполнения системы 500 транспортного средства 100 для обнаружения и отслеживания объекта 200. Система 500 может выполнять по меньшей мере некоторые из вышеописанных этапов 401-407 в соответствии со способом 400, описанным выше и проиллюстрированным на Фиг. 4.
Система 500 содержит по меньшей мере один блок 310 управления транспортного средства 100 для обнаружения и отслеживания объекта 200. Блок 310 управления выполнен с возможностью обнаружения объекта 200, находящегося за пределами установленного по умолчанию обзора устройства 320-1, 320-2, предназначенного для отображения объектов 200 вне поля прямой видимости водителя, на основании сигналов, принимаемых от датчика 110, 120-1, 120-2, 130. Кроме того, блок 310 управления выполнен с возможностью формирования управляющих сигналов для отслеживания обнаруженного объекта 200 с помощью датчика 110, 120-1, 120-2, 130. Также блок 310 управления выполнен с возможностью формирования управляющих сигналов для вывода представления обнаруженного объекта 200 посредством упомянутого устройства 320-1, 320-2.
Дополнительно блок 310 управления может быть выполнен с возможностью определения местоположения обнаруженного объекта 200 относительно транспортного средства 100 на основании принимаемых сигналов датчика. В дополнение блок 310 управления может быть выполнен с возможностью формирования управляющих сигналов для вывода информации, указывающей определенное местоположение обнаруженного объекта 200, для водителя.
В некоторых вариантах выполнения, в которых транспортное средство 100 содержит множество датчиков 110, 120-1, 120-2, 130, ориентируемых в направлении объекта 200, блок 310 управления может быть дополнительно выполнен с возможностью создания трехмерного изображения объекта 200 на основании информации, принимаемой от множества датчиков 110, 120-1, 120-2, 130. Кроме того, блок 310 управления может быть выполнен с возможностью идентификации объекта 200 на основании созданного изображения. В некоторых вариантах выполнения блок 310 управления также может быть выполнен с возможностью классификации обнаруженного объекта 200 путем распознавания изображения. Кроме того, блок 310 управления также может быть выполнен с возможностью формирования управляющих сигналов для вывода представления объекта 200 на устройстве 320-1, 320-2, предназначенном для отображения объектов 200 вне поля прямой видимости водителя, при приближении транспортного средства 100 к объекту 200.
Блок 310 управления содержит схему 510 приема, выполненную с возможностью приема сигнала от датчиков 110, 120-1, 120-2, 130.
Кроме того, блок 310 управления содержит процессор 520, выполненный с возможностью выполнения по меньшей мере некоторых этапов способа 400 в соответствии с некоторыми вариантами выполнения.
Такой процессор 520 может включать в себя одно или более из схемы обработки, т.е. центральный блок обработки (CPU), блока обработки, интегральной схемы специального назначения (ASIC), микропроцессора или другую логику обработки, которая может интерпретировать и выполнять инструкции. Таким образом, используемое в настоящем документе выражение «процессор» может означать совокупность схем обработки, содержащую множество схем обработки, например, любые, некоторые или все из перечисленных выше.
Кроме того, в некоторых вариантах выполнения блок 310 управления может содержать память 525. Опциональная память 525 может включать в себя физическое устройство, используемое для хранения данных или программ, т.е. последовательностей инструкций, на временной или постоянной основе. В соответствии с некоторыми вариантами выполнения память 525 может включать в себя интегральные схемы, в том числе кремниевые транзисторы. В различных вариантах выполнения память 525 может включать в себя, например, карту памяти, флэш-память, USB-память, жесткий диск или другой подобный энергозависимый или энергонезависимый блок хранения для хранения данных, например, ROM (постоянное запоминающее устройство), PROM (программируемое постоянное запоминающее устройство), EPROM (стираемое PROM), EEPROM (электрически стираемое PROM) и т.д.
Кроме того, в некоторых вариантах выполнения блок 310 управления может содержать передатчик 530 сигнала. Передатчик 530 сигнала может быть выполнен с возможностью передачи сигнала, например, в устройство 320-1, 320-2 отображения, дисплейное устройство или систему предупреждения или устройство предупреждения, например.
В дополнение система 500 также содержит по меньшей мере один датчик 110, 120-1, 120-2, 130 транспортного средства 100 для обнаружения объекта 200, находящегося за пределами установленного по умолчанию обзора устройства 320-1, 320-2, предназначенного для отображения объектов вне поля прямой видимости водителя. Датчик 110, 120-1, 120-2, 130 может включать в себя, например, камеру, стереокамеру, инфракрасную камеру, видеокамеру, радиолокационный датчик, лидарный датчик, ультразвуковой датчик, времяпролетную камеру, тепловизионную камеру или т.п. Датчик 110, 120-1, 120-2, 130, используемый для выполнения по меньшей мере части способа 400, в некоторых вариантах выполнения может иметь другую основную цель, чем выполнение способа 400, т.е. представляет собой датчик, уже существующий в транспортном средстве 100.
Дополнительно система 500 также содержит по меньшей мере одно устройство 320-1, 320-2, предназначенное для отображения объектов 200 вне поля прямой видимости водителя.
Вышеописанные этапы 401-407, которые должны выполняться в транспортном средстве 100, могут быть реализованы посредством одного или более процессоров 520 блока 310 управления, наряду с компьютерным программным продуктом для выполнения по меньшей мере некоторых из этапов 401-407. Таким образом, компьютерный программный продукт, содержащий инструкции для выполнения этапов 401-407 в блоке 310 управления, может выполнять способ 400, содержащий по меньшей мере некоторые из этапов 401-407, для обнаружения и отслеживания объекта 200, если компьютерная программа загружена в один или более процессоров 520 блока 310 управления.
Кроме того, некоторые варианты выполнения изобретения могут включать в себя транспортное средство 100, содержащее блок 310 управления для обнаружения и отслеживания объекта 200 в соответствии с по меньшей мере некоторыми из этапов 401-407.
Вышеупомянутый компьютерный программный продукт может быть обеспечен, например, в виде носителя данных, содержащего компьютерный программный код для выполнения по меньшей мере некоторых из этапов 401-407 в соответствии с некоторыми вариантами выполнения, если он загружен в один или более процессоров 520 блока 310 управления. Носитель данных может представлять собой, например, жесткий диск, CD-ROM, карту памяти, оптическое запоминающее устройство, магнитное запоминающее устройство или любой другой подходящий носитель, например, диск или ленту, которые могут хранить машиночитаемые данные неизменным образом. Кроме того, компьютерный программный продукт может быть обеспечен в виде компьютерного программного кода на сервере и удаленно загружен в блок 310 управления, например, через соединение по сети интернет или интранет.
Терминология, используемая в описании вариантов выполнения, проиллюстрированных на сопровождающих чертежах, не предназначена для ограничения описанного способа 400; блока 310 управления; компьютерной программы; системы 500 и/или транспортного средства 100. Различные изменения, замены и/или модификации могут быть выполнены без отклонения от вариантов выполнения изобретения, определенных приложенной формулой изобретения.
В данном контексте выражение «и/или» включает в себя любые и все сочетания одного или более связанных перечисленных элементов. Выражение «или» в настоящем документе следует интерпретировать как математическое ИЛИ, т.е. как логическое сложение; а не как математическое исключающее ИЛИ (XOR), если не указано иное. Кроме того, формы единственного числа следует интерпретировать как «по меньшей мере один», что также может включать в себя множество компонентов одинакового вида, если не указано иное. Кроме того, следует понимать, что выражения «включает в себя», «содержит», «включающий в себя» и/или «содержащий» указывают на наличие изложенных признаков, действий, целых чисел, этапов, операций, элементов и/или компонентов, но не исключают наличия или возможности добавления одного или более других признаков, действий, целых чисел, этапов, операций, элементов, компонентов и/или их групп. Один блок, например, процессор, может выполнять функции нескольких элементов, перечисленных в формуле изобретения. Сам по себе тот факт, что определенные средства перечислены в различных зависимых пунктах формулы изобретения, не означает, что совокупность этих средств не может быть использована с достижением преимущества. Компьютерная программа может храниться/распространяться на подходящем носителе, таком как оптический носитель данных или твердотельный носитель, поставляемый вместе с другим аппаратным обеспечением или как его часть, но также может распространяться в других формах, например, посредством сети интернет или другой проводной или беспроводной системы связи.
Группа изобретений относится блоку управления для транспортного средства. Блок управления транспортного средства для обнаружения и отслеживания объекта выполнен с возможностью обнаружения объекта, находящегося за пределами установленной по умолчанию области покрытия устройства, предназначенного для отображения изображения или потока изображений объектов вне поля прямой видимости водителя, на основании сигналов, захваченных датчиком принимаемых от него, формирования управляющих сигналов для отслеживания обнаруженного объекта датчиком и перенаправления датчика из установленной по умолчанию области покрытия в область, в которой расположен объект, и отображения представления обнаруженного объекта в упомянутом устройстве, причём упомянутое представление представляет собой обзор перенаправленного датчика. Достигается повышение дорожной безопасности за счет отслеживания объекта, находящегося в слепой зоне зеркала заднего вида. 4 н. и 6 з.п. ф-лы, 5 ил.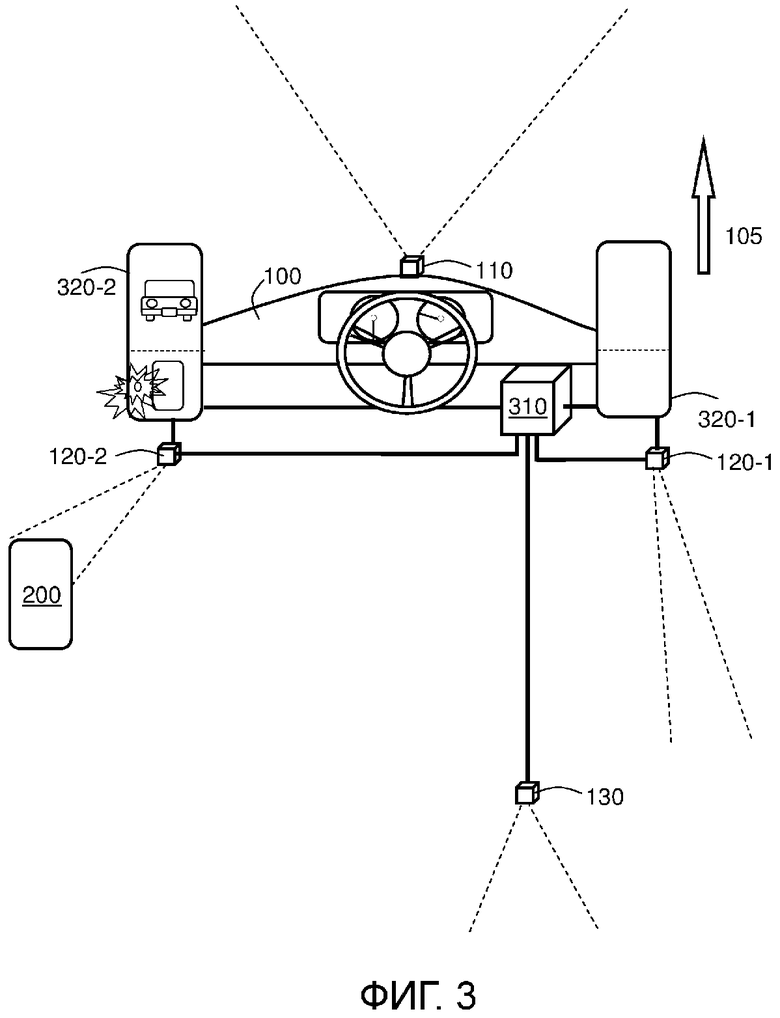
1. Способ (400) обнаружения и отслеживания объекта (200) для транспортного средства (100), причем способ (400) содержит этапы, на которых:
обнаруживают (401) объект (200), находящийся за пределами установленной по умолчанию области покрытия устройства (320-1, 320-2), предназначенного для отображения изображения или потока изображений объектов (200) вне поля прямой видимости водителя, захваченных посредством датчика (110, 120-1, 120-2, 130); и
отслеживают (402) обнаруженный (401) объект (200) путем регулировки датчика (110, 120-1, 120-2, 130) и перенаправления датчика (110, 120-1, 120-2, 130) из установленной по умолчанию области покрытия в область, в которой расположен объект; и
отображают представление обнаруженного объекта (200) в упомянутом устройстве (320-1, 320-2), причём упомянутое представление представляет собой обзор перенаправленного датчика.
2. Способ (400) по п. 1, в котором регулировка датчика (110, 120-1, 120-2, 130) содержит этап, на котором поворачивают датчик (110, 120-1, 120-2, 130).
3. Способ (400) по любому из пп. 1 или 2, в котором регулировка датчика (110, 120-1, 120-2, 130) содержит этап, на котором расширяют угол обзора датчика (110, 120-1, 120-2, 130).
4. Способ (400) по любому из пп. 1-3, дополнительно содержащий этапы, на которых:
определяют (403) местоположение обнаруженного (401) объекта (200) относительно транспортного средства (100) и
выводят (404) информацию, указывающую определенное (403) местоположение обнаруженного (401) объекта (200), для водителя.
5. Способ (400) по любому из пп. 1-4, в котором транспортное средство (100) содержит множество датчиков (110, 120-1, 120-2, 130), ориентируемых в направлении объекта (200), и при этом способ (400) дополнительно содержит этапы, на которых:
создают (405) трехмерное изображение объекта (200) на основании информации, захваченной множеством датчиков (110, 120-1, 120-2, 130);
идентифицируют (406) объект (200) на основании созданного (405) изображения и
выводят (407) представление объекта (200) на упомянутом устройстве (320-1, 320-2) при приближении транспортного средства (100) к объекту (200).
6. Блок (310) управления транспортного средства (100) для обнаружения и отслеживания объекта (200), причем блок (310) управления выполнен с возможностью:
обнаружения объекта (200), находящегося за пределами установленной по умолчанию области покрытия устройства (320-1, 320-2), предназначенного для отображения изображения или потока изображений объектов (200) вне поля прямой видимости водителя, на основании сигналов, захваченных датчиком (110, 120-1, 120-2, 130), принимаемых от него; и
формирования управляющих сигналов для:
отслеживания обнаруженного объекта (200) датчиком (110, 120-1, 120-2, 130) и перенаправления датчика (110, 120-1, 120-2, 130) из установленной по умолчанию области покрытия в область, в которой расположен объект; и
отображения представления обнаруженного объекта (200) в упомянутом устройстве (320-1, 320-2), причём упомянутое представление представляет собой обзор перенаправленного датчика.
7. Блок (310) управления по п. 6, дополнительно выполненный с возможностью:
определения местоположения обнаруженного объекта (200) относительно транспортного средства (100) на основании принимаемых сигналов датчика и
формирования управляющих сигналов для вывода информации, указывающей определенное местоположение обнаруженного объекта (200), для водителя.
8. Блок (310) управления по любому из пп. 6 или 7, причем транспортное средство (100) содержит множество датчиков (110, 120-1, 120-2, 130), ориентируемых в направлении объекта (200), и причем блок (310) управления дополнительно выполнен с возможностью:
создания трехмерного изображения объекта (200) на основании информации, принимаемой от множества датчиков (110, 120-1, 120-2, 130);
идентификации объекта (200) на основании созданного изображения и
формирования управляющих сигналов для вывода представления объекта (200) на устройстве (320-1, 320-2), предназначенном для отображения объектов (200) вне поля прямой видимости водителя, при приближении транспортного средства (100) к объекту (200).
9. Процессор, запрограммированный программным кодом для выполнения способа (400) по любому из пп. 1-5 при выполнении программного кода в процессоре блока (310) управления по любому из пп. 6-8.
10. Система (500) обнаружения и отслеживания объекта (200), расположенного вне поля прямой видимости водителя, для транспортного средства, причем система (500) содержит:
блок (310) управления по любому из пп. 6-8;
по меньшей мере один датчик (110, 120-1, 120-2, 130) транспортного средства (100) для обнаружения объекта (200), находящегося за пределами обзора устройства (320-1, 320-2), предназначенного для отображения изображения или потока изображений объектов вне поля прямой видимости водителя, захваченных упомянутым по меньшей мере одним датчиком (110, 120-1, 120-2, 130); и
по меньшей мере одно устройство (320-1, 320-2), предназначенное для отображения изображения или потока изображений объектов (200) вне поля прямой видимости водителя.
| US 2014132770 A1, 15.05.2014 | |||
| AU 9816198 A, 22.07.1999 | |||
| US 2013155534 A1, 20.06.2013 | |||
| СПОСОБ И УСТРОЙСТВО ОБНАРУЖЕНИЯ НЕИСПРАВНОСТЕЙ СООТВЕТСТВЕННО ДИАГНОСТИКИ ДАТЧИКА ДЕТОНАЦИОННОГО СГОРАНИЯ | 2001 |
|
RU2265744C2 |
| БОРТОВОЕ УСТРОЙСТВО РАСПОЗНАВАНИЯ ИЗОБРАЖЕНИЙ | 2013 |
|
RU2573110C1 |
| US 2014214255 A1, 31.07.2014. | |||

