Изобретение относится к радиолокационным системам посадки летательных аппаратов (ЛА) и может быть использовано в системах управления воздушным движением.
Известны комплексные системы посадки (КСП) ЛА, построенные с применением сложной авиационной техники, направленной на обеспечение высокого уровня безопасности полетов (БП).
К таким КСП относится, например, система ILS (Instrument Landing System), стандартизированная международной организацией гражданской авиации (ICAO) [1] . Такая КСП содержит наземную аппаратуру, включающую посадочные (курсоглиссадные, маркерные и дальномерные) радиолокационные маяки (РМ), посадочный радиолокатор, аппаратуру обработки и отображения информации, пульт диспетчера посадки и бортовую аппаратуру, включающую пилотажно-навигационный блок с приемниками сигналов РМ, аппаратуру отображения информации, пульт пилота, при этом пульты диспетчера посадки и пилота связаны линией радиосвязи.
Усовершенствованная система ILS предложена в заявке [2] и является прототипом заявляемого изобретения.
КСП-прототип содержит (см. фиг. 1) наземную аппаратуру, состоящую из посадочных РМ, а также последовательно соединенных между собой клеммами "Выход"-"Вход" посадочного радиолокатора 1, блока обработки информации 2, блока вычисления координат 3, наземного видеопреобразователя 4, индикатора диспетчера посадки 5, входящего в пульт диспетчера посадки 6, бортовую аппаратуру, состоящую из последовательно соединенных между собой клеммами "Выход"-"Вход" пилотажно-навигационного блока 7, включающего приемники сигналов РМ и информационные входы, связанные с выходами бортовых датчиков, бортового видеопреобразователя 8, индикатора пилота 9, входящего в пульт пилота 10, линию радиосвязи между пультами диспетчера посадки и пилота 11, а также формирователя области безопасной скорости планирования 12, входом соединенного с дополнительным выходом пилотажно-навигационного блока, а выходом с дополнительным входом видеопреобразователя.
В данной КСП на экране индикатора пилота дополнительно отображается область безопасных скоростей планирования, в которой необходимо удерживать отметку вектора скорости ЛА при заводе на посадку для того, чтобы избежать колебаний вокруг линии посадки. Последнее свойство повышает БП по сравнению с КСП ILS, стандартизированной ICAO.
Однако использование достаточно совершенной и сложной авиационной техники не решает проблему БП, так как возможности совершенствования человека ограничены его физиологией и психологией [2]. Поэтому взаимодействие пилота и диспетчера посадки в системе "человек-машина" оказывается главным фактором в проблеме обеспечения БП.
В этом плане упомянутые выше аналог и прототип построены неоптимально и обладают недостаточными возможностями для обеспечения БП.
Существенным недостатком является то, что отображение информации при заводе на посадку на индикаторах пилота и диспетчера посадки графически неидентично, так как формирование полетной информации на индикаторе пилота осуществляется по информации, вырабатываемой бортовыми устройствами с помощью РМ, а отображение информации на индикаторе диспетчера посадки производится с помощью посадочного радиолокатора.
Недавние исследования психологии восприятия зрительных образов показали [4] , что при определенной структуре графической информации наблюдается резонанс восприятия. При неидентичности отображаемой информации для диспетчера посадки и пилота имеют место различные уровни восприятия ими полетной информации, что затрудняет взаимопонимание между ними в процессе завода на посадку. Таким образом, контур управления полетом в части отображения информации, включающий диспетчера посадки и пилота, оказывается практически разомкнутым, а БП недостаточной.
Использование линии радиосвязи между пилотом и диспетчером не решает проблему, так как процесс восприятия для слуховой информации является более замедленным, чем для зрительной информации.
Кроме того, недостаточно эффективно предложенное в КСП-прототипе слежение за скоростью ЛА в заданных пределах, реализованное путем отображения вектора скорости в виде точечной метки внутри "окна" допустимых значений.
Так как отметка самого ЛА реализуется в виде маркерной метки (риски), то упомянутое отображение вектора скорости снижает общую разрешающую способность КСП. При этом требуется раздвоение внимания пилота между метками ЛА и вектора скорости ЛА, что дополнительно усложняет процесс восприятия пилотной информации. Обратная связь между диспетчером посадки и пилотом в этом случае еще более затруднена, и контур управления полетом также практически разомкнут.
Наконец, к недостаткам систем типа ILS следует отнести сложность эксплуатации, обусловленную удаленностью РМ от остальной аппаратуры.
Задачей заявляемого изобретения является повышение безопасности полетов при заводе на посадку путем отображения информации на индикаторах пилота и диспетчера посадки в виде, оптимальном для их восприятия и взаимодействия, обеспечивающем эффективную обратную связь между пилотом и диспетчером посадки.
Параллельно решается задача повышения эксплуатационности КСП ЛА путем локализации аппаратуры.
Поставленная задача решается следующим образом.
В комплексную систему посадки летательных аппаратов, содержащую наземную аппаратуру, состоящую из последовательно соединенных между собой клеммами "Выход"-"Вход" посадочного радиолокатора, блока обработки информации, блока вычисления координат, наземного видеопреобразователя, индикатора диспетчера посадки, входящего в пульт диспетчера посадки, бортовую аппаратуру, состоящую из последовательно соединенных между собой клеммами "Выход"-"Вход" пилотажно-навигационного блока, бортового видеопреобразователя, индикатора пилота, входящего в пульт пилота, а также линию радиосвязи между пультами диспетчера посадки и пилота, причем пилотажно-навигационный блок содержит информационные входы, связанные с выходами бортовых датчиков, введена двусторонняя линия передачи данных, включающая наземные приемник и передатчик, связанные между собой наземной антенной системой, и бортовые приемник и передатчик, связанные между собой бортовой антенной системой, введены бортовые формирователи векторов курсовой и глиссадной скоростей и наземный разделитель векторов курсовой и глиссадной скоростей, причем наземный и бортовой видеопреобразователи выполнены с дополнительными входами, выход блока вычисления координат одновременно подключен ко входу наземного передатчика, выход бортового приемника подключен ко входу пилотажно-навигационного блока, входы бортовых формирователей курсовой и глиссадной скоростей подключены к дополнительному выходу пилотажно-навигационного блока, выходы бортовых формирователей векторов курсовой и глиссадной скоростей подключены ко входам бортового передатчика и одновременно к дополнительным входам бортового видеопреобразователя, а выход наземного приемника через разделитель векторов курсовой и глиссадной скоростей подключен к дополнительным входам наземного видеопреобразователя.
Предлагается также способ завода на посадку, использующий предложенную КСП ЛА и состоящий в том, что на курсоглиссадных индикаторах диспетчера посадки и пилота использованы идентичные развертки с изображением линий курса и глиссады, а также зон, ограниченных линиями равных отклонений от курса и глиссады. При этом летательный аппарат изображают в виде курсовых и глиссадных векторов, начало которых совпадает с центром радиолокационной отметки летательного аппарата, а направление и длина указывают соответственно на направление и величину курсовой и глиссадной скоростей, причем при удалении от зоны, ограниченной упомянутыми выше линиями равных отклонений, пилотирование производится по направлению векторов соответствующих составляющих скоростей до совмещения начала векторов с линиями равных отклонений, а далее по мере приближения к линиям курса и глиссады упомянутые векторы разворачивают в сторону точки приземления так, чтобы при совмещении начала векторов с линиями курса и глиссады упомянутые векторы были направлены в общем случае по касательной к соответствующим линиям курса и глиссады.
Предлагается также вариант описанного выше способа, отличающийся тем, что на индикаторах диспетчера посадки и пилота использованы радиально-секторные развертки, при этом при приближении курсовых и глиссадных векторов к соответствующим линиям курса и глиссады эти векторы совмещают с упомянутыми линиями.
В развитие упомянутого способа предложено векторы курсовой и глиссадной скоростей изображать в виде пунктирных линий масштабных меток скоростей, при этом длину упомянутых векторов выбирают в общем случае из условия
Λ1,2≤l1,2,
а при подлете к взлетно-посадочной полосе (ВПП)
l1,2<L,
где l1,2 - длины векторов курсовой и глиссадной скоростей;
Λ1,2 - длины масштабных меток соответствующих скоростей;
L - расстояние от начала ВПП до точки приземления.
Работа заявляемого устройства и суть предложенного способа поясняются на фиг.1а-3.
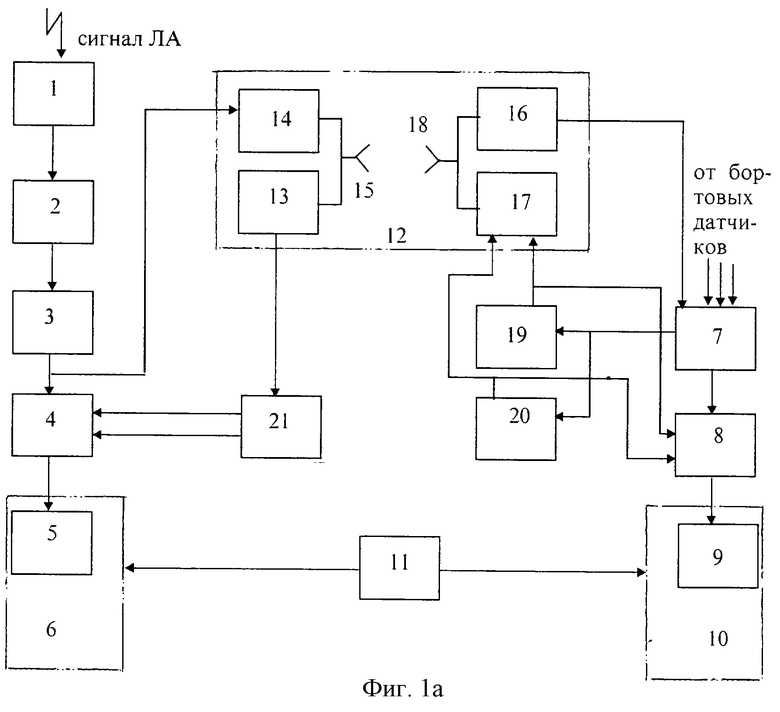
На фиг.1а представлена блок-схема предложенной КСП ЛА;
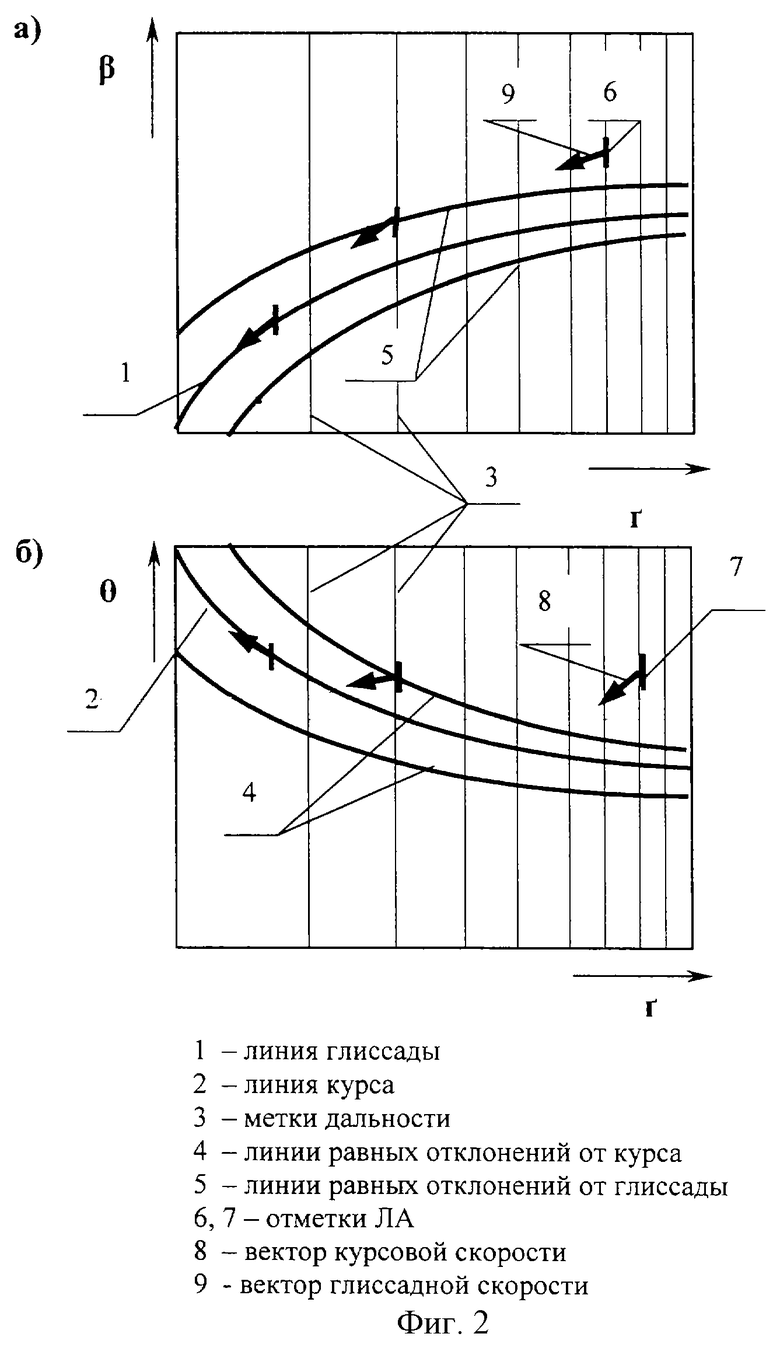
на фиг. 2а, б - картина отображения на индикаторах диспетчера посадки и пилота глиссадных (а) и курсовых (б) параметров при прямоугольной развертке;
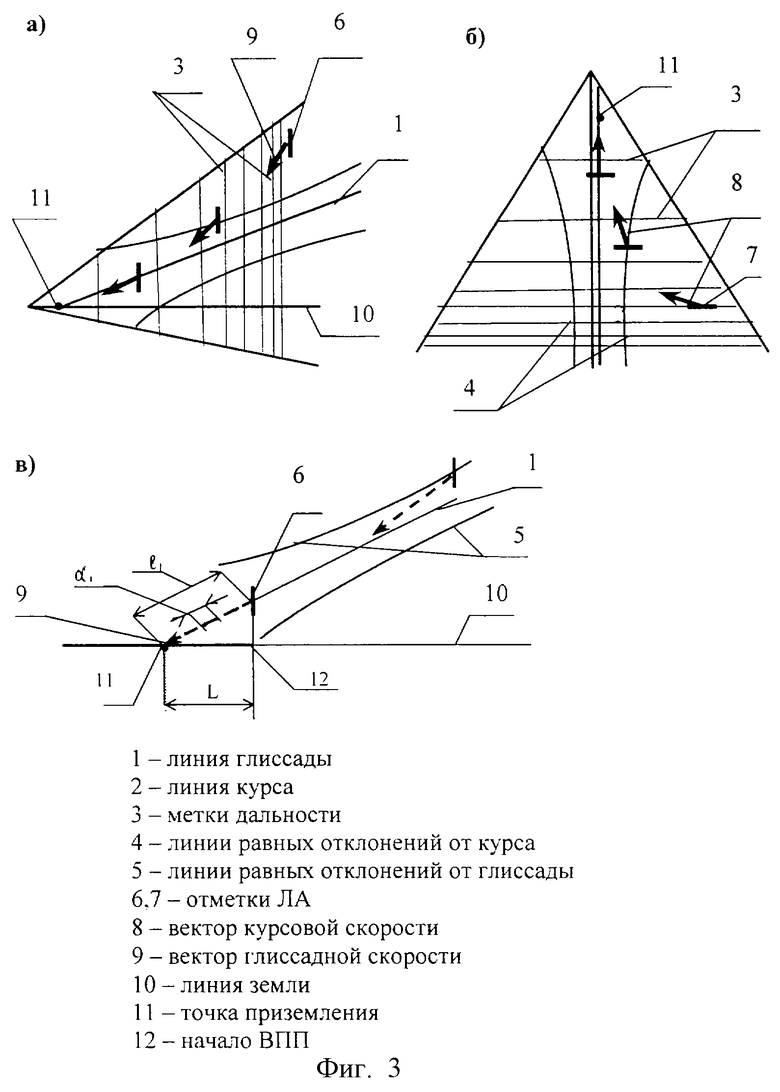
на фиг.3а, б - та же картина при радиально-секторной развертке;
на фиг. 3в - увеличенный фрагмент радиально-секторной развертки по глиссаде в области ВПП.
КСП ЛА на фиг.1 содержит наземную аппаратуру, состоящую из последовательно соединенных между собой клеммами "Выход"-"Вход" посадочного радиолокатора (ПРЛ)1, блока обработки информации (БОИ)2, блока вычисления координат (БПК)3, наземного видеопреобразователя (НВП) 4, индикатора диспетчера посадки 5, входящего в пульт диспетчера посадки 6, бортовую аппаратуру, состоящую из последовательно соединенных между собой клеммами "выход"-"вход" пилотажно-навигационного блока 7, бортового видеопреобразователя (БВП)8, индикатора пилота 9, входящего в пульт пилота 10, а также линию радиосвязи между пультами диспетчера посадки и пилота 11, причем пилотажно-навигационный блок (ПНБ) содержит информационные входы, связанные с выходами бортовых датчиков.
Введены двусторонняя линия передачи данных (ДЛПД)12, включающая наземные приемник 13 и передатчик 14, связанные между собой наземной антенной системой 15, и бортовые приемник 16 и передатчик 17, связанные между собой бортовой антенной системой 18, бортовые формирователи (БФ) вектора курсовой скорости (ВКС) 19 и глиссадной скорости (ВГС)20 и наземный разделитель векторов (НРВ) курсовой и глиссадной скоростей 21, причем наземный и бортовой видеопреобразователи выполнены с дополнительными входами, выход блока вычисления координат одновременно подключен ко входу наземного передатчика 14, выход бортового приемника 16 подключен ко входу пилотажно-навигационного блока 7, входы бортовых формирователей курсовой и глиссадной скоростей 19,20 подключены к дополнительному выходу пилотажно-навигационного блока (ПНБ)7, выходы бортовых формирователей векторов курсовой и глиссадной скоростей 19,20 подключены ко входам бортового передатчика 17 и одновременно к дополнительным входам бортового видеопреобразователя 8, а выход наземного приемника 13 через разделитель векторов курсовой и глиссадной скоростей 21 подключен к дополнительным входам наземного видеопреобразователя 4.
КСП работает следующим образом.
При фиксации ПРЛ 1 сигнала ЛА информация с выхода ПРЛ поступает на вход БОИ 2 и после обработки на вход БВК 3, где производится выделение из массива информации координат местоположения ЛА по курсу и глиссаде. Далее НВП 4, принимая радиолокационную информацию с выхода БВК 3, преобразует радиолокационный формат информации в видеоформат, требуемый для отображения на индикаторе диспетчера посадки 5 в пульте диспетчера 6.
Одновременно информация с выхода БВК 3 с помощью ДЛПД 12 (передатчик 14 - антенные системы 15,18 - приемник 16) передается на вход ПНБ 7, формирующего информационный пакет с учетом необходимых пилоту данных, формируемых бортовыми датчиками, в том числе - скорости ЛА, тангажа, крена.
Информация с выхода ПНБ 7 преобразуется к видеоформатному виду БВП 8 и далее отображается на индикаторе пилота 9 в пульте пилота 10. При этом с дополнительного выхода ПНБ 7 производится съем данных о скорости ЛА на входы бортовых формирователей ВКС 19 и ВГС 20, формирующих информацию о скорости ЛА в виде векторов курсовой и глиссадной скоростей (т.е. составляющих скорости по курсу и глиссаде). С выходов 19 и 20 данные о ВКС и ВГС поступают на дополнительные входы БВП 8 и далее совмещаются с общим "курсоглиссадным" отображением на индикаторе 9.
Одновременно ВКС и ВГС транслируются с выходов 19 и 20 с помощью ДЛПД 12 (передатчик 17 - антенные системы 15,18 -приемник 15). Информация о составляющих скорости передается на наземную аппаратуру - на вход НРВ 21, где из общего информационного пакета выделяются данные ВКС и ВГС, подаются на дополнительные входы НВП 4, а далее совмещаются с общим "курсоглиссадным" отображением на индикаторе диспетчера посадки 5.
Таким образом, на индикаторах диспетчера посадки и пилота отображается идентичная картина, включающая как линии курса и глиссады ЛА, так и векторы составляющих скорости ЛА по курсу и глиссаде. Восприятие информации пилотом и диспетчером посадки оказывается как бы на одном уровне резонансной кривой [4]. В результате сформирована функционально полная обратная связь между диспетчером посадки и пилотом, и контур управления посадкой в системе отображения оказывается замкнутым. Использование линии радиосвязи 11 в этом случае носит резервный характер, причем ее использование оказывается значительно более эффективным, чем в КСП-прототипе, так как обмен радиоинформацией между пилотом и диспетчером посадки происходит на основе идентичных отображений на индикаторах.
Исключение удаленных РМ из КСП позволяет также уменьшить общую площадь размещения аппаратуры и тем увеличить, следовательно, ее эксплуатационность.
Отображение наиболее эффективно, если векторы курсовой и глиссадной скоростей совмещать с радиолокационной отметкой ЛА, как показано на фиг.2 и 3. Представлены линии глиссады 1, линия курса 2, метки дальности 3, линии равных отклонений от курса 4 и глиссады 5, отметки ЛА 6 и 7. Эти элементы отображения являются типовыми для индикатора диспетчера посадки при использовании известных наземных ПРЛ (см., например, [5]). Однако ЛА отображается в данном случае в виде векторов ВКС 8 и ВГС 9, сформированных на борту БФ ВКС и БФ ВГС, при этом начало каждого вектора совпадает с центром соответствующей отметки ЛА, а направление и длина указывает на направление и величину соответствующей составляющей скорости.
Подобное отображение ЛА в аппаратуре КСП в виде векторов является принципиально новым и позволяет одномоментно воспринимать и пилоту, и диспетчеру посадки как отметку ЛА, так и направление и скорость его движения в данный момент времени.
Предложенное решение позволяет обеспечивать наиболее безопасный способ посадки, уменьшая до минимума колебания ЛА вокруг идеальной линии посадки.
При этом последовательность действий пилота при посадке состоит в том, что при удалении ЛА от зоны, ограниченной линиями равных отклонений от курса 4 и глиссады 5, пилотирование производится по направлению соответствующих векторов скорости - ВКС 8 и ВГС 9 - до совмещения начала этих векторов с упомянутыми линиями 4 и 5 соответственно, а далее, по мере приближения ЛА к линиям курса и глиссады 1,2, ВКС 8 и ВГС 9 разворачивают в сторону точки приземления так, чтобы при совмещении начала векторов с линиями 1 и 2 они были бы направлены в общем случае по касательной к соответствующим линиям курса и глиссады. В частности, при прямоугольной развертке (фиг.2) векторы скорости в процессе посадки доводят последовательно до положения касательной к линиям курса и глиссады.
При использовании радиально-секторной развертки (фиг.3 а,б), где линии курса и глиссады представляются прямыми линиями 1,2, ВКС 8 и ВГС 9 доводятся пилотом до совмещения с этими линиями.
Отсчет величины скорости удобно производить при высвечивании на ВКС 8 и ВГС 9 масштабных меток скорости (см. фиг.3в), при этом размеры векторов целесообразно ограничивать так, чтобы минимальный размер соответствовал одной масштабной метке скорости, а максимальный при достижении начала ВПП не превышал бы расстояния от начала ВПП до точки приземления. Таким образом, ограничения на размер ВКС 8 и ВГС 9 можно выразить в виде
в общем случае
Λ1,2≤l1,2,
а при подлете к ВПП
l1,2<L,
где l1,2 - длины ВКС 8 и ВГС 9 соответственно;
Λ1,2 - длины масштабных меток ВКС и ВГС;
L - расстояние от начала ВПП до точки приземления.
(Так как при подлете к началу ВПП наклон линии глиссады составляет не более единиц градусов, то длину линии глиссады от начала ВПП до точки приземления также считаем равной L).
Предложенный способ завода на посадку позволяет те только, как указывалось выше, сформировать замкнутый контур управления полетом, но и повысить разрешающую способность КСП ЛА по сравнению с КСП-прототипом.
Совмещение отметки ЛА с вектором скорости увеличивает размер отображения ЛА при одновременном увеличении информационной емкости отображения. Это свойство проявляется с наибольшим эффектом при использовании радиально-секторной развертки (фиг.3).
Ранее при использовании прямоугольной развертки разрешающая способность при посадке была существенно выше, чем при использовании радиально-секторной развертки. В первом случае размер отметки ЛА не зависит от расстояния до точки приземления, так как ее размер определяется только шириной диаграммы направленности антенны. Во втором случае размер отметки ЛА равен произведению ширины диаграммы направленности на расстояние. Таким образом, при радиально-секторной развертке размер отметки ЛА с уменьшением расстояния до точки приземления уменьшается, достигая в пределе размера светового пятна, что существенно снижает разрешающую способность.
Предложенное решение, укрупняя за счет вектора скорости размер отметки ЛА, позволяет в последнем случае осуществить независимость разрешающей способности от расстояния до точки приземления. Радиально-секторная развертка становится при этом наиболее предпочтительной, так как совмещение векторов скорости с линиями курса и глиссады более наглядно, чем расположение этих векторов в виде касательных к этим линиям.
Таким образом, заявляемое изобретение позволяет построить КСП ЛА и осуществить на его основе способ завода на посадку, обеспечивающие значительное повышение безопасности полетов при посадке ЛА благодаря формированию замкнутого контура управления посадкой ЛА, включающего диспетчера посадки и пилота, что в свою очередь возможно благодаря отображению информации на борту и на земле в одинаково оптимальном для их восприятия и взаимодействия виде.
Кроме того, повышается эксплуатационная способность КСП ЛА, что обеспечено исключением РМ из состава КСП, удаленных от места размещения ПРЛ и диспетчерского зала.
Изготовлен и прошел успешные испытания экспериментальный образец заявленного КСП. В качестве большинства узлов и блоков КСП использованы серийно-выпускаемые изделия:
ПРЛ 1 - посадочный радиолокатор типа РП 3Ф;
БОИ 2, БВК 3, НВП 4 - аппаратура первичной обработки информации типа АПОИ-С2;
пульт 6 с индикатором 5 - пульт руководителя системы посадки ВИСП-75Т;
ДЛПД 12 - телеметрический комплекс передачи информации "Орбита IV".
Испытания проводились с самолетом типа СУ-21 на реализованных в нем блоках ПНБ 7, БВП 8, пультом пилота 10 и индикатором 9.
БФ ВКС 19, БФ ВГС 20 и НРВ 21 реализованы методами цифровой аналоговой логики с помощью микропроцессоров серии Intel 486.
Получены сравнительные данные по отношению к КСП-прототипу:
1. Скорость принятия решения пилотом и диспетчером посадки увеличена в 2,5 раза и составляет около 1,5-2 с.
2. Экспертные оценки показывают, что БП при этом увеличивается в 1,5 раза.
Таким образом, предложенная новая структурная схема КСП ЛА и реализуемый на ее основе способ завода ЛА на посадку позволяют увеличить безопасность полета при посадке и осуществлять посадку по высшей категории сложности.
ИСТОЧНИКИ ИНФОРМАЦИИ, ПРИНЯТЫЕ ВО ВНИМАНИЕ
1. Авиационная радионавигация. Справочник под ред. А.А. Сосновского. М.: Транспорт, 1990, стр.151
2. Система управления полетом ЛА вдоль заданной траектории. Заявка 2752051 Франция, МПК6 G 01 С 23/00, заявл. 2.8.96; опубл. 6.2.98 г.
3. Ломов Б.Ф. и др. Образ в системе психической регуляции деятельности. М.: Наука, 1986 г.
4. Крейцер А.В., Спиваковский А.М. Синергетические аспекты анализа нечетной информации. В сб. "Синергетика и методы науки". С-Пб, "Наука", 1998 г.
5. Кузнецов А. А. и др. Эксплуатация средств управления воздушным движением. Справочник. М.: Транспорт, 1983 г., стр.28.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМПЛЕКСНАЯ СИСТЕМА ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ И СПОСОБ ЗАХОДА НА ПОСАДКУ | 2004 |
|
RU2273590C1 |
| КОМПЛЕКСНАЯ СИСТЕМА ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ И СПОСОБ ЗАХОДА НА ПОСАДКУ | 2006 |
|
RU2341774C2 |
| КОМПЛЕКСНАЯ СИСТЕМА ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ И СПОСОБ ЗАВОДА НА ПОСАДКУ | 2003 |
|
RU2239203C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО НА ЕГО ОСНОВЕ | 2004 |
|
RU2267797C2 |
| ВЗЛЕТНО-ПОСАДОЧНЫЙ КОМПЛЕКС РАДИОЛОКАЦИОННОЙ АППАРАТУРЫ | 2001 |
|
RU2199719C1 |
| Система управления полётами, заходом на посадку и посадкой вертолетов для оборудования стартовых командных пунктов надводных кораблей и диспетчерских пунктов, размещаемых на судах и морских платформах | 2017 |
|
RU2667654C1 |
| ВЗЛЕТНО-ПОСАДОЧНЫЙ КОМПЛЕКС РАДИОЛОКАЦИОННОЙ АППАРАТУРЫ | 2002 |
|
RU2229101C2 |
| СПОСОБ ЗАХОДА НА ПОСАДКУ ЛЕТАТЕЛЬНОГО АППАРАТА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2559196C1 |
| СПОСОБ УПРАВЛЕНИЯ САМОЛЕТОМ ПРИ ЗАХОДЕ НА ПОСАДКУ | 2011 |
|
RU2478523C2 |
| СИСТЕМА АВТОМАТИЧЕСКОЙ ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2004 |
|
RU2284058C2 |
Изобретение относится к радиолокационным системам посадки летательных аппаратов и может быть использовано в системах управления воздушным движением. Достигаемый технический результат - повышение безопасности полета при посадке. Упомянутая комплексная система посадки содержит посадочный радиолокатор, блок обработки информации, блок вычисления координат, наземный и бортовой видеопреобразователи, индикаторы посадки и пилота, наземный разделитель векторов курсовой и глиссадной скоростей, пилотажно-навигационный блок, бортовые формирователи векторов курсовой и глиссадной скоростей, а также двустороннюю линию передачи данных, включающую наземные и бортовые приемники, передатчики и антенные системы. На индикаторах диспетчера посадки и пилота отображается идентичная информация, включающая линии курса и глиссады и векторы курсовой и глиссадной скоростей, что позволяет осуществить замкнутый контур управления посадкой. Предлагается способ завода на посадку путем совмещения векторов курсовой и глиссадной скоростей с отметкой цели и направления их по касательной к линиям курса и глиссады, что уменьшает колебания летательного аппарата вокруг оси и увеличивает наглядность отображения. Изобретение позволяет осуществлять посадку летательных аппаратов по высшей категории сложности. 2 с. и 4 з.п. ф-лы, 4 ил.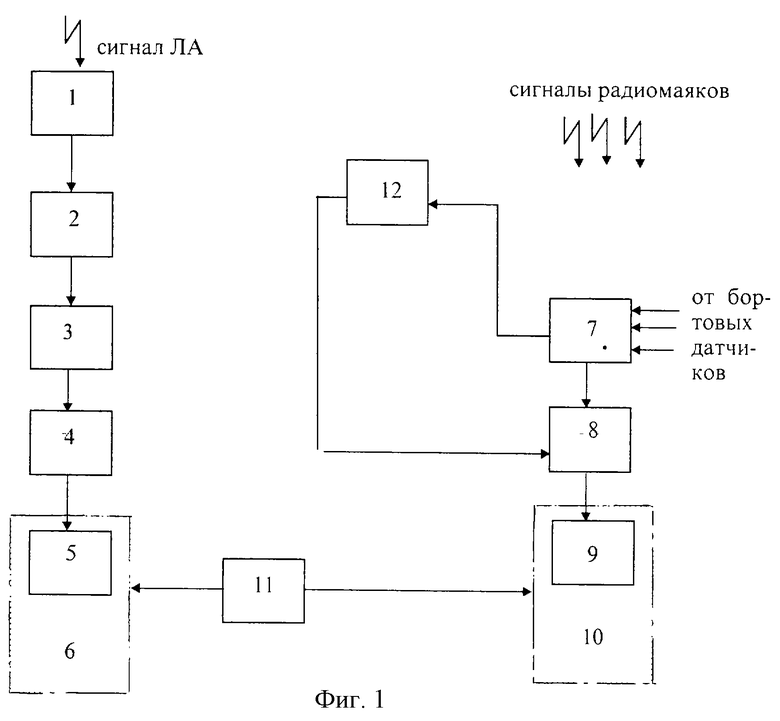
в общем случае
Λ1,2≤11,2,
а при подлете к ВПП (взлетно-посадочной полосе)
l1,2<L,
где l1,2 - длины векторов курсовой и глиссадной скоростей;
Λ1,2 - длины масштабных меток соответствующих скоростей;
L - расстояние от начала ВПП до точки приземления.

