ПЕРЕКРЕСТНАЯ ССЫЛКА НА РОДСТВЕННУЮ(ЫЕ) ЗАЯВКУ(И)
Данная заявка испрашивает приоритет по предварительной заявке на патент США № 62/418,044, поданной 4 ноября 2016 г. и озаглавленной «Flex Collar for a Rotary Steerable System», раскрытие которой включено в данную заявку посредством ссылки в полном объеме.
УРОВЕНЬ ТЕХНИКИ
Данное изобретение в целом относится к роторным управляемым системам (РУС), например, к буровым системам, используемым для наклонно-направленного бурения стволов скважин при разведке и добыче нефти и газа. Более конкретно, варианты реализации изобретения относятся к роторным управляемым системам, содержащим гибкую утяжеленную бурильную трубу для достижения изгибов меньших радиусов поворота.
Работы по наклонно-направленному бурению включают управление направлением ствола скважины во время его бурения. Обычно целью наклонно-направленного бурения является достижение целевого подземного местоположения с помощью бурильной колонны, и часто буровую колонну необходимо поворачивать на небольшой радиус, чтобы достичь целевого местоположения. Как правило, РУС изменяет направление либо путем отклонения к одной стороне стенки ствола скважины с помощью направляющих опорных подкладок, чтобы таким образом заставить буровое долото отклониться в противоположную сторону (в системе отклонения долота), либо путем изгиба основного вала, проходящего через невращающийся корпус для направления бурового долота в определенном направлении относительно остальной части инструмента (в системе направления долота). В системе отклонения долота стенка ствола скважины, как правило, контактирует с буровым долотом, направляющими опорными подкладками и стабилизатором. Способность такой системы управлять направлением бурения преимущественно определяется кривой, которая может определяться через каждое из: бурового долота, направляющих опорных подкладок и стабилизатора.
КРАТКОЕ ОПИСАНИЕ ГРАФИЧЕСКИХ МАТЕРИАЛОВ
Данное изобретение подробно описано далее только в качестве примера на основании примеров, представленных на прилагаемых фигурах, при этом:
На Фиг. 1 проиллюстрирован частичный вид сбоку в поперечном сечении наклонного ствола скважины, бурение которого осуществляют с помощью компоновки низа бурильной колонны, содержащей РУС;
На Фиг. 2 проиллюстрирован схематический вид компоновки низа бурильной колонны, содержащей гибкую утяжеленную бурильную трубу, соединенную с верхним концом РУС;
На Фиг. 3А проиллюстрирован схематический вид РУС, содержащей гибкую утяжеленную бурильную трубу, соединенную с ней, в соответствии с данным изобретением;
На Фиг. 3B проиллюстрирован вид в поперечном сечении гибкой утяжеленной бурильной трубы в соответствии с Фиг. 3A;
На Фиг. 4 представлен вид сбоку в поперечном сечении РУС, содержащей гибкую утяжеленную бурильную трубу, соединенную между ее секцией управления наклонно-направленным бурением и секцией контроля, с проиллюстрированной траекторией потока, проходящей через них;
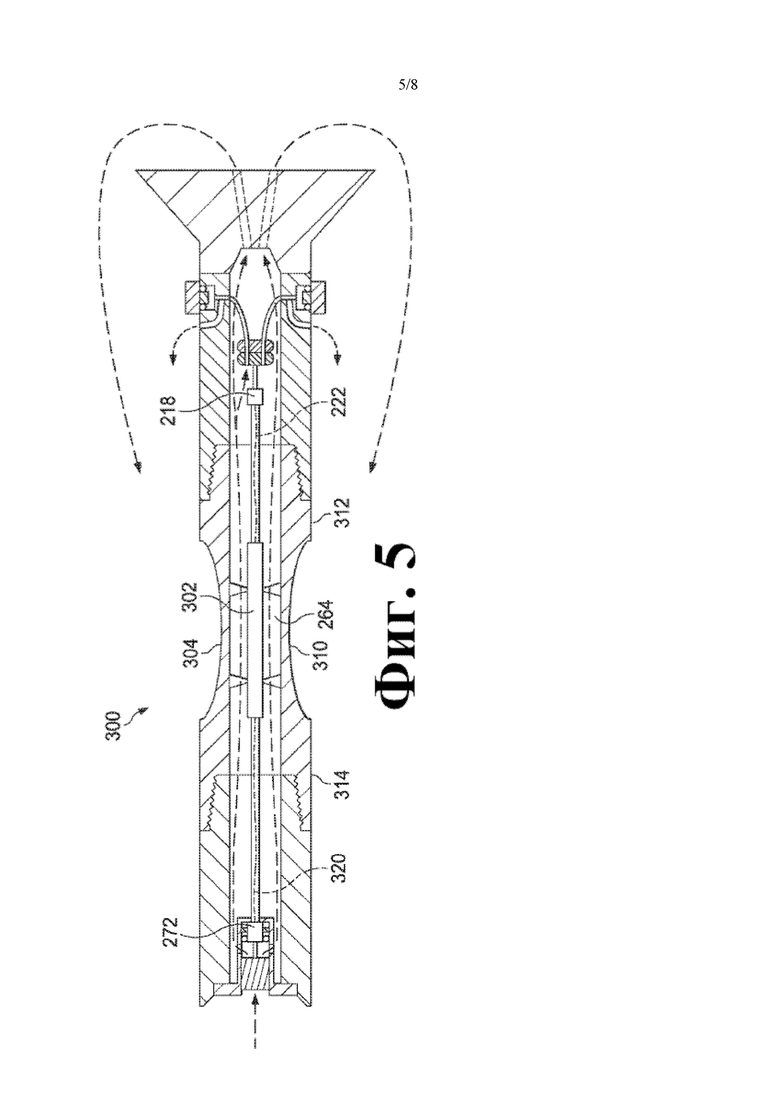
На Фиг. 5 проиллюстрирован вид сбоку в поперечном сечении РУС, содержащей контроллер, расположенный внутри ее гибкой утяжеленной бурильной трубы;
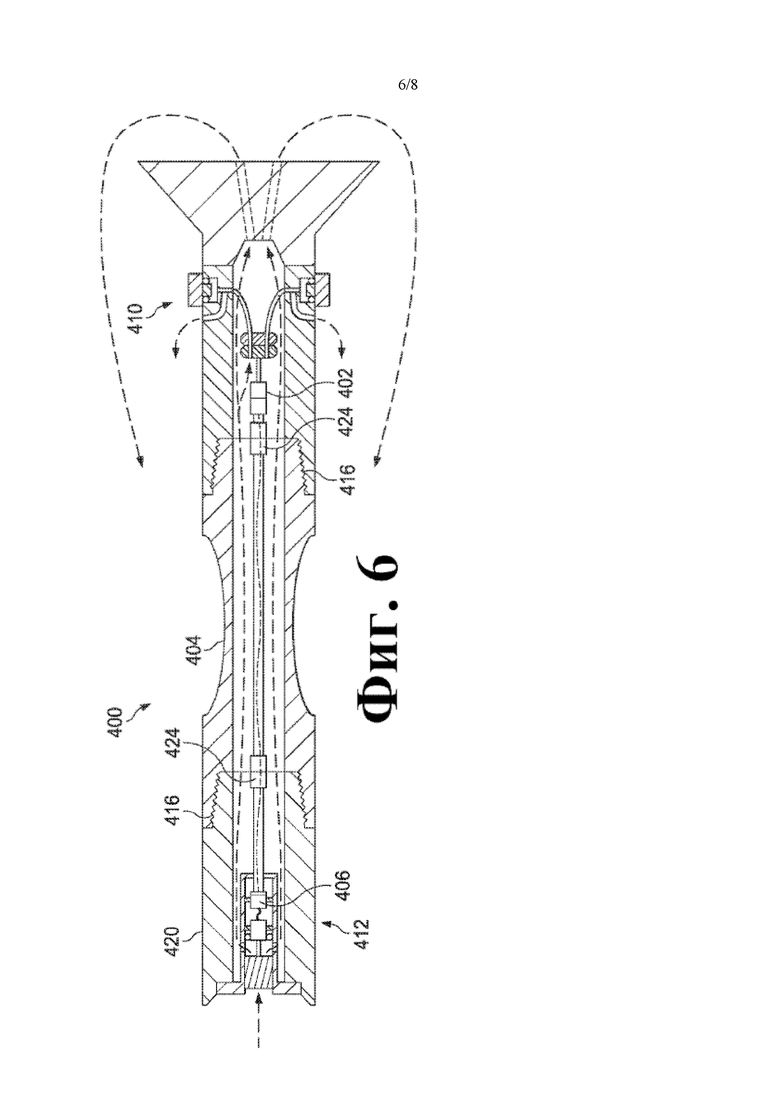
На Фиг. 6 проиллюстрирован вид сбоку в поперечном сечении РУС, содержащей комплект датчиков динамического каротажа, расположенный под ее гибкой утяжеленной бурильной трубой, и комплект датчиков стационарного каротажа, расположенный над гибкой утяжеленной бурильной трубой;
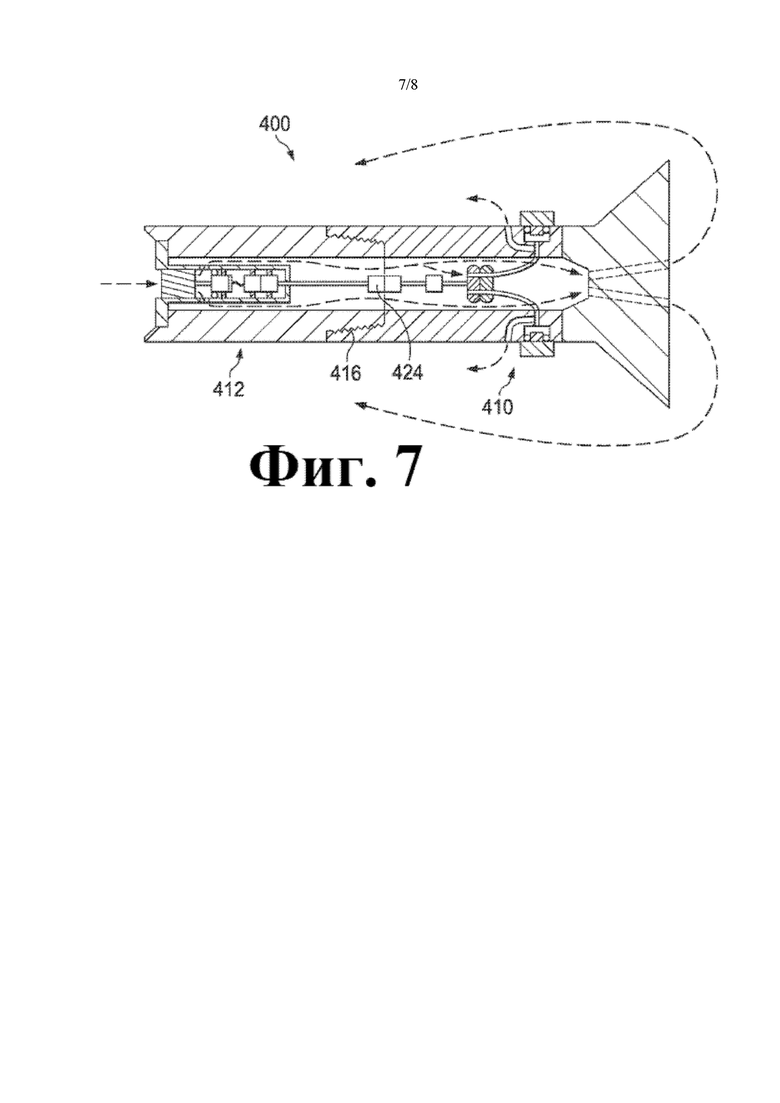
На Фиг. 7 проиллюстрирован вид сбоку в поперечном сечении РУС с удаленной из нее гибкой утяжеленной бурильной трубой;
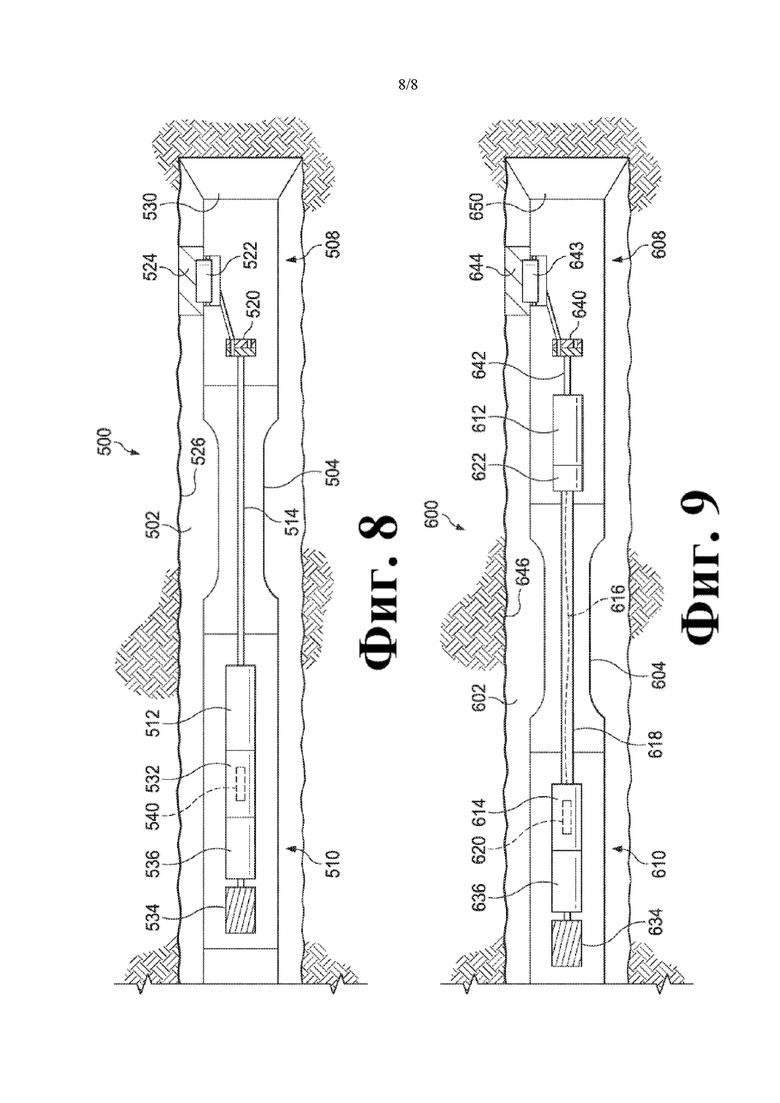
На Фиг. 8 представлен схематический вид РУС, расположенной внутри ствола скважины, причем РУС содержит гибкую утяжеленную бурильную трубу, расположенную между ее секцией управления наклонно-направленным бурением и секцией контроля, иллюстрирующий двигатель клапана, расположенный в секции контроля, и вал двигателя клапана, проходящий через гибкую утяжеленную бурильную трубу; а также
На Фиг. 9 представлен схематический вид РУС, расположенной внутри ствола скважины, причем РУС содержит гибкую утяжеленную бурильную трубу, расположенную между ее секцией управления наклонно-направленным бурением и секцией контроля, иллюстрирующий двигатель клапана, расположенный в секции управления направлением бурения, и линию питания/управления, проходящую через гибкую утяжеленную бурильную трубу между контроллером управления и клапаном двигателя.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Данное изобретение включает РУС, содержащую гибкую утяжеленную бурильную трубу, соединенную с ней, которая уменьшает жесткость РУС и позволяет добиться изгибов меньшего радиуса поворота. Расположение гибкой утяжеленной бурильной трубы между секцией управления наклонно-направленным бурением и контроллером РУС дополнительно увеличивает достижимый радиус поворота. Гибкая утяжеленная бурильная труба может быть выполнена с возможностью обеспечения через нее связи между контроллером и секцией управления наклонно-направленным бурением, и РУС может быть выполнена в виде модульной системы для приема различных конфигураций гибкой утяжеленной бурильной трубы, а также может работать без установленной гибкой утяжеленной бурильной трубы.
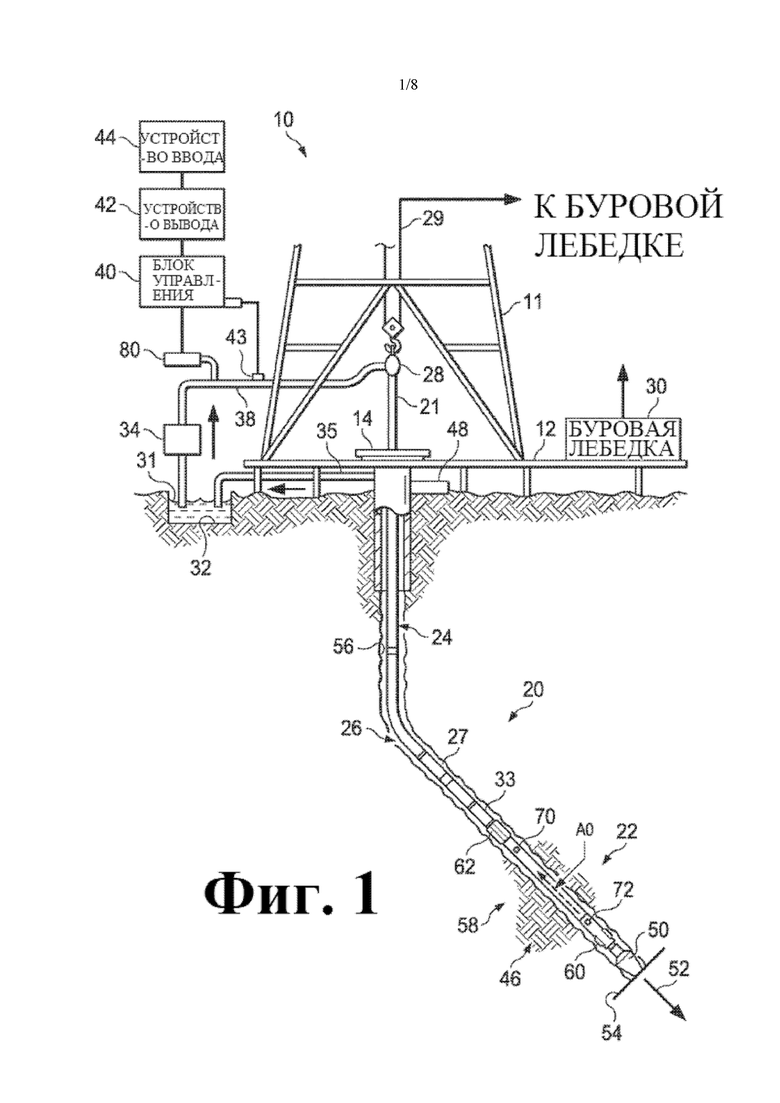
На Фиг. 1 проиллюстрирован частичный вид сбоку в поперечном сечении наклонного ствола скважины, бурение которого осуществляют с помощью компоновки низа бурильной колонны (КНБК), содержащей РУС. Проиллюстрирована приведенная в качестве примера система 10 наклонно-направленного бурения, содержащая конструкцию башенного типа или «буровую вышку» 11, опорой для которой служит площадка 12 буровой вышки. Площадка 12 буровой вышки поддерживает стол 14 ротора, который приводится в движение с требуемой скоростью вращения, например, посредством системы цепного привода с помощью первичного привода (не проиллюстрирован). Стол 14 ротора, в свою очередь, обеспечивает необходимую вращательную силу для бурильной колонны 20. Бурильная колонна 20, которая имеет секцию 24 бурильной трубы, проходит вниз от стола 14 ротора вглубь наклонного ствола 26 скважины. Ствол 26 скважины может иметь многомерный путь или «траекторию». Трехмерное направление забоя 54 ствола 26 скважины в соответствии с Фиг. 1 представлено стрелкой 52.
Буровое долото 50 прикреплено к дистальному, забойному концу бурильной колонны 20. При вращении, например, посредством вращающегося стола 14, буровое долото 50 работает для разрушения и, как правило, размельчения геологической формации 46. Буровая колонна 20 соединена с подъемным устройством 30 «буровой лебедки», например, с помощью ведущей бурильной трубы 21, вертлюжного соединения 28 и линии 29 через талевую систему (не проиллюстрирована). Во время буровых работ буровая лебедка 30 в некоторых вариантах реализации изобретения может быть выполнена с возможностью управления нагрузкой на буровое долото 50 и скоростью прохождения бурильной колонны 20 вглубь ствола 26 скважины.
Во время буровых работ подходящий раствор для бурения или «буровой раствор» 31 может подаваться под давлением из резервуара 32 для бурового раствора в ствол 26 скважины через бурильную колонну 20 с помощью гидравлического «насоса для закачки бурового раствора» 34. Буровой раствор 31 поступает из насоса 34 для закачки бурового раствора в бурильную колонну 20 через трубопровод (обычно называемый «линией для бурового раствора») 38 для подачи жидкости и ведущую бурильную трубу 21. Буровой раствор 31 выпускается в забое 54 ствола скважины через отверстие или насадку в буровом долоте 50 и циркулирует в направлении «вверх по стволу скважины» к поверхности через кольцевое пространство 27 между бурильной колонной 20 и стенкой 56 ствола скважины 26. Когда буровой раствор 31 приближается к вращающемуся столу 14, он выпускается через возвратную линию 35 в резервуар 32 для бурового раствора. Различные поверхностные датчики 48, которые соответствующим образом развернуты на поверхности ствола 26 скважины, работают отдельно или в сочетании со скважинными датчиками 70, 72, развернутыми в стволе 26 скважины, для предоставления информации о различных связанных с бурением параметрах, таких как расход жидкости, нагрузка на долото, нагрузка на крюк и т. д.
Поверхностный блок 40 управления может принимать сигналы от поверхностных и скважинных датчиков (например, датчиков 48, 70, 72) и устройств через датчик или преобразователь 43, который может быть размещен на линии 38 для подачи жидкости. Поверхностный блок 40 управления может быть выполнен с возможностью обработки таких сигналов в соответствии с запрограммированными командами, подаваемыми на поверхностный блок 40 управления. Поверхностный блок 40 управления может представлять оператору требуемые параметры бурения и другую информацию через одно или более устройств 42 вывода, таких как дисплей, монитор компьютера, динамики, индикаторы и т. д., которые могут использоваться оператором для управления буровыми работами. Поверхностный блок 40 управления может содержать компьютер, память для хранения данных, регистратор данных и другие известные и в дальнейшем разработанные периферийные устройства. Поверхностный блок 40 управления также может содержать модели и может обрабатывать данные в соответствии с запрограммированными командами и реагировать на пользовательские команды, введенные через подходящее устройство 44 ввода, которое может быть представлено в виде клавиатуры, сенсорного экрана, микрофона, мыши, джойстика и т. д.
В некоторых вариантах реализации настоящего изобретения вращающееся буровое долото 50 прикреплено к дистальному концу компоновки низа бурильной колонны (КНБК) 22, содержащей роторную управляемую систему (РУС) 58. В проиллюстрированном варианте реализации изобретения КНБК 22 присоединена между буровым долотом 50 и секцией 24 бурильной трубы бурильной колонны 20. КНБК 22 и/или РУС 58 может содержать систему измерения в процессе бурения (ИПБ) с различными датчиками, например датчиками 70, 72, для предоставления информации о формации 46 и параметрах скважинного бурения. Датчики ИПБ в КНБК 22 могут содержать, но не ограничиваются этим, устройство для измерения удельного сопротивления пласта вблизи бурового долота, устройство для измерения гамма-излучения в отношении естественной радиоактивности пласта, устройства для определения наклона и азимута бурильной колонны 20, а также датчики давления для измерения давления бурового раствора в забое скважины. Датчики ИПБ также могут содержать дополнительные/альтернативные чувствительные устройства для измерения импульса, вибрации, нагрузки на долото, крутящего момента, телеметрии и т. д. Вышеупомянутые устройства могут передавать данные в скважинный коммуникатор 33, который, в свою очередь, передает данные вверх по стволу скважины в поверхностный блок 40 управления. В некоторых вариантах реализации изобретения КНБК 22 также может содержать систему каротажа в процессе бурения (КПБ).
Датчик 43 может быть размещен в линии 38 для подачи бурового раствора для обнаружения импульсов бурового раствора в ответ на данные, передаваемые скважинным коммуникатором 33. Датчик 43, в свою очередь, генерирует электрические сигналы, например, в ответ на изменения давления бурового раствора, и передает такие сигналы в поверхностный блок 40 управления. В качестве альтернативного варианта могут использоваться другие методы телеметрии, такие как электромагнитные и/или акустические методы, или любые другие подходящие методы, известные или разработанные в дальнейшем. В качестве примера, бурильную трубу с жестким монтажом могут использовать для связи между поверхностными и скважинными устройствами. В другом примере могут быть использованы комбинации описанных методов. Поверхностный передатчик/приемник 80 связывается со скважинными инструментами, с помощью, например, любого из описанных методов передачи, таких как метод гидроимпульсной телеметрии. Это может обеспечить двустороннюю связь между поверхностным блоком 40 управления и скважинным коммуникатором 33 и другими скважинными инструментами.
КНБК 22 и/или РУС 58 может обеспечить некоторое или все усилие, необходимое для того, чтобы долото 50 пробивало формацию 46 (известное как «нагрузка на долото»), и чтобы обеспечить необходимое управление наклонно-направленным бурением ствола 26 скважины. РУС 58 может содержать секцию управления наклонно-направленным бурением с направляющими опорными подкладками 60, выдвигаемыми в боковом направлении от продольной оси A0 РУС 58, чтобы оказывать давление на геологическую формацию 46. Направляющие опорные подкладки 60 могут включать в себя шарнирно-сочлененные опорные подкладки, рычаги, ребра, стержни, приводимые в движение опорные лапы стабилизатора или любой другой элемент, выдвигаемый из РУС 58 для контакта со стенкой 56 ствола 26 скважины. Направляющие опорные подкладки 60 могут быть разнесены по окружности вокруг РУС 58 и могут по отдельности выдвигаться для контакта со стенкой 56 ствола 26 скважины для приложения противоположного бокового усилия к буровому долоту 50 в поперечном направлении к продольной оси РУС 58 относительно ствола 26 скважины во время бурения. Направляющие опорные подкладки 60 могут включать в себя комплект по меньшей мере из трех установленных снаружи направляющих опорных подкладок 60 для приложения усилия контролируемым образом для отклонения бурового долота 50 в требуемом направлении для управления наклонно-направленным бурением. В некоторых вариантах реализации изобретения направляющие опорные подкладки 60 приводятся в действие небольшим количеством раствора для бурения или бурового раствора 31, закачиваемого через бурильную колонну 20 и буровое долото 50 для удаления шлама, охлаждения и управления скважиной. Таким образом, РУС 58 использует «свободную» гидравлическую энергию раствора для бурения или бурового раствора 31 для управления наклонно-направленным бурением. В случае традиционных сервоприводных/соленоидных систем привода потребляемая мощность составляет порядка 100-300 Вт. Направляющие опорные подкладки 60 могут обеспечивать регулируемое усилие, помогающее управлять направлением ствола 26 скважины. РУС 58 также содержит стабилизатор 62, соединенный с ее секцией контроля.
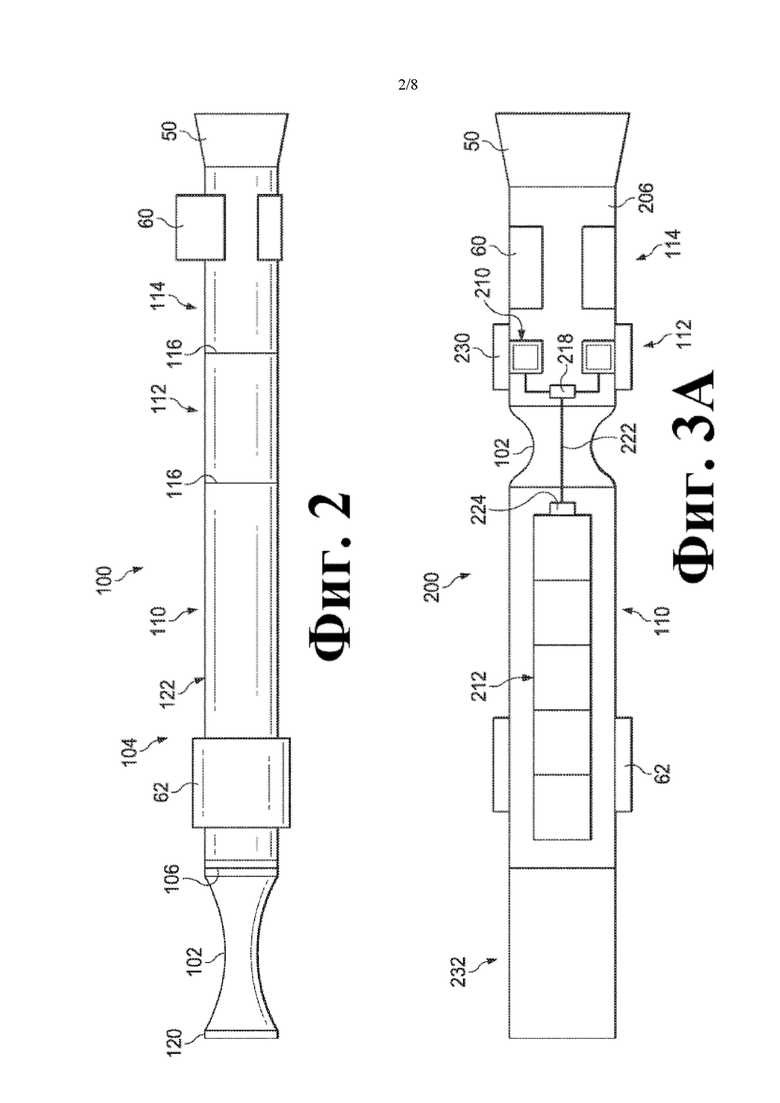
На Фиг. 2 проиллюстрирован схематический вид компоновки низа бурильной колонны 100, содержащей гибкую утяжеленную бурильную трубу 102, соединенную с верхним концом РУС 104. Гибкая утяжеленная бурильная труба 102 может содержать конструктивный соединитель 106, такой как резьба, защелки и т. д., на своем ведущем или забойном конце для выборочного соединения с задним или верхним концом РУС 104. РУС 104 содержит блок 110 контроля, блок 112 управления потоком и блок 114 управления наклонно-направленным бурением, каждый из которых может быть помещен в отдельный корпус. В качестве альтернативного варианта, конструктивные соединители 116 могут быть предусмотрены между секцией 110 контроля, секцией 112 управления потоком и секцией 114 управления наклонно-направленным бурением. Гибкая утяжеленная бурильная труба 102 может быть выполнена так, чтобы демонстрировать меньшую жесткость при изгибе, чем корпус или корпусы секции 110 контроля, секции 112 управления потоком и секции 114 управления наклонно-направленным бурением. Она может содержать соединитель 120 бурильной колонны на своем верхнем конце для соединения КНБК 100 с секцией 24 бурильной трубы (Фиг. 1) бурильной колонны 20. Кроме того, компоновка низа бурильной колонны 100 может демонстрировать большую гибкость, чем одна лишь РУС 104.
Буровое долото 50 соединено с забойным концом секции 114 управления наклонно-направленным бурением, который содержит множество направляющих опорных подкладок 60 или других толкающих устройств для управления буровым долотом 50. Направляющие опорные подкладки 60 могут быть выполнены в виде шарнирно-сочлененных толкателей опорных подкладок, управляющих поршней или аналогичных поршней, таких как поршни, установленные на стабилизаторах регулируемого размера (не проиллюстрированы). Участок 112 управления потоком присоединен над секцией 114 управления наклонно-направленным бурением (или содержит верхнюю часть секции 114 управления наклонно-направленным бурением) и предназначен для отвода части всего раствора для бурения или бурового раствора 31 (Фиг. 1) закачанного через КНБК 100. Как правило, секция 112 управления потоком может содержать комплект 210 клапанов (Фиг. 3A), который отклоняет около 5-8% основного потока бурового раствора. Отклоненная часть проходит через фильтрующий элемент перед тем, как направляется к соответствующей направляющей опорной подкладке 60 или толкающему устройству через каналы потока, определенные в секции 114 управления наклонно-направленным бурением. Отклонение потока обычно достигается с помощью приводимых в действие/управляемых механическим способом клапанных узлов 210, но возможны и другие устройства. Для управления и привода механических клапанных узлов 210 традиционно используют узлы серводвигателя, редуктора и/или подшипниковые узлы. Для такого редуктора и/или подшипниковых узлов могут требоваться системы компенсации объема, если требуется заполнение нефтью, и уплотняющие растворы для предотвращения попадания раствора для бурения или бурового раствора 31.
Участок 110 контроля содержит блок 212 электронного оборудования (Фиг. 3A), содержащий комплекты датчиков направления и наклона (НН), комплекты датчиков гамма-каротажа (ГК), а также датчики ИПБ или КПБ других типов. Участок 110 контроля также может содержать ЦП, устройство электропитания и устройство связи (например, скважинный коммуникатор 33). Компоненты генерирования электроэнергии и/или электропитания также обычно расположены в пределах секции 110 контроля. Компоненты генерирования электроэнергии и/или электропитания должны иметь достаточные размеры для питания блока 212 электронного оборудования, приведения в действие узлов механических клапанов и компенсации любых потерь на трение, создаваемых уплотнениями, подшипниками, редукторами и т. д. Стабилизатор 62 соединен с наружным корпусом 122 секции 110 контроля.
Теоретическая способность КНБК 100 управлять наклонно-направленным бурением обычно определяется кривой, которая может проходить через стабилизатор 62, направляющие опорные подкладки 60 и буровое долото 50. Это те компоненты, которые обычно контактируют с геологической формацией 46 (Фиг. 1) при образовании ствола 26 скважины. Изгиб секции 110 контроля, секции 112 управления потоком и секции 114 управления наклонно-направленным бурением может увеличить при работе отклик управления КНБК 100, но изгиб этих секций 110, 112, 114 обычно ограничен, чтобы предотвратить повреждение или нарушение работы внутренних компонентов этих секций 110, 112, 114, что могло бы привести к снижению точности управления наклонно-направленным бурением (например, управления передней поверхностью режущего инструмента).
На Фиг. 3А проиллюстрирован схематический вид РУС 200, содержащей гибкую утяжеленную бурильную трубу 102, соединенную с ней, в соответствии с настоящим изобретением. Гибкая утяжеленная бурильная труба 102 присоединена между секцией 114 управления наклонно-направленным бурением и секцией 110 контроля. Как проиллюстрировано на Фиг. 3А, секция 112 управления потоком размещена вместе с секцией 114 управления наклонно-направленным бурением в корпусе 206. Участок 110 контроля содержит модульный блок 212 управления и электронного оборудования датчиков, а секция 112 управления потоком содержит узлы 210 клапанов и другие устройства управления потоком. Для работы узлов 210 клапанов в секции 112 управления потоком может требоваться электрическое соединение с блоком 212 электронного оборудования в секции 110 контроля. В случае, когда узлы 210 клапанов содержат аккумулятор или другой источник питания (не проиллюстрирован), находящийся в корпусе 206 секции 114 управления наклонно-направленным бурением, узлам 210 клапанов могут требоваться только команды, которые передаются через гибкую утяжеленную бурильную трубу 102. Команды могут поступать от принимающего блока 218 связи секции 114 управления наклонно-направленным бурением. В случае, когда узлы 210 клапанов не содержат источника питания, для узлов 210 клапанов могут требоваться команды, а также питание, подаваемые по гибкой утяжеленной бурильной трубе 102. Команды и данные могут передаваться через электрический проводник, такой как многожильный коммуникационный кабель 222, провод или другую электрическую линию, проходящую через гибкую утяжеленную бурильную трубу 102. Передающий блок 224 связи может быть функционально соединен с модульным блоком 212 электронного оборудования для получения от него команд и может быть функционально соединен с коммуникационным кабелем 222 для передачи через него команд. Поскольку через гибкую утяжеленную бурильную трубу должен проходить только электрический коммуникационный кабель 222, гибкая утяжеленная бурильная труба 102 с уменьшенной жесткостью при изгибе может быть добавлена в непосредственной близости к буровому долоту 50, то есть непосредственно над направляющими опорными подкладками 60.
Ведущий стабилизатор 230 содержит секцию 114 управления наклонно-направленным бурением и проходит в боковом направлении от корпуса 206. Ведущий стабилизатор 230 может препятствовать тому, чтобы часть изгибающих напряжений, прикладываемых к бурильной колонне 20 (Фиг. 1), проходящей через криволинейный ствол скважины, прикладывалась к направляющим опорным подкладкам 60. Было обнаружено, что эти изгибающие напряжения в некоторых случаях приводят к тому, что направляющие опорные подкладки 60 частично втягиваются в корпус 206, предотвращая тем самым эффективное управление буровым долотом 50. Ведущий стабилизатор 230 может быть расположен вблизи или над направляющими опорными подкладками 60 и может выступать из того же корпуса 206, что и направляющие опорные подкладки 60.
Силовой отсек 232 расположен над секцией 110 управления. Силовой отсек 232 может содержать лопатки турбины (не проиллюстрированы), которые извлекают энергию из бурового раствора 31 (Фиг. 1), закачиваемого в бурильную колонну 20 (Фиг. 1), для выработки электрической энергии для блока 212 электронного оборудования, передающего блока 224 связи, принимающего блока 218 связи и узлов 210 клапанов. Узлы 210 клапанов могут опираться на электродвигатель (не проиллюстрирован) для выборочной подачи бурового раствора на направляющие опорные подкладки 60.
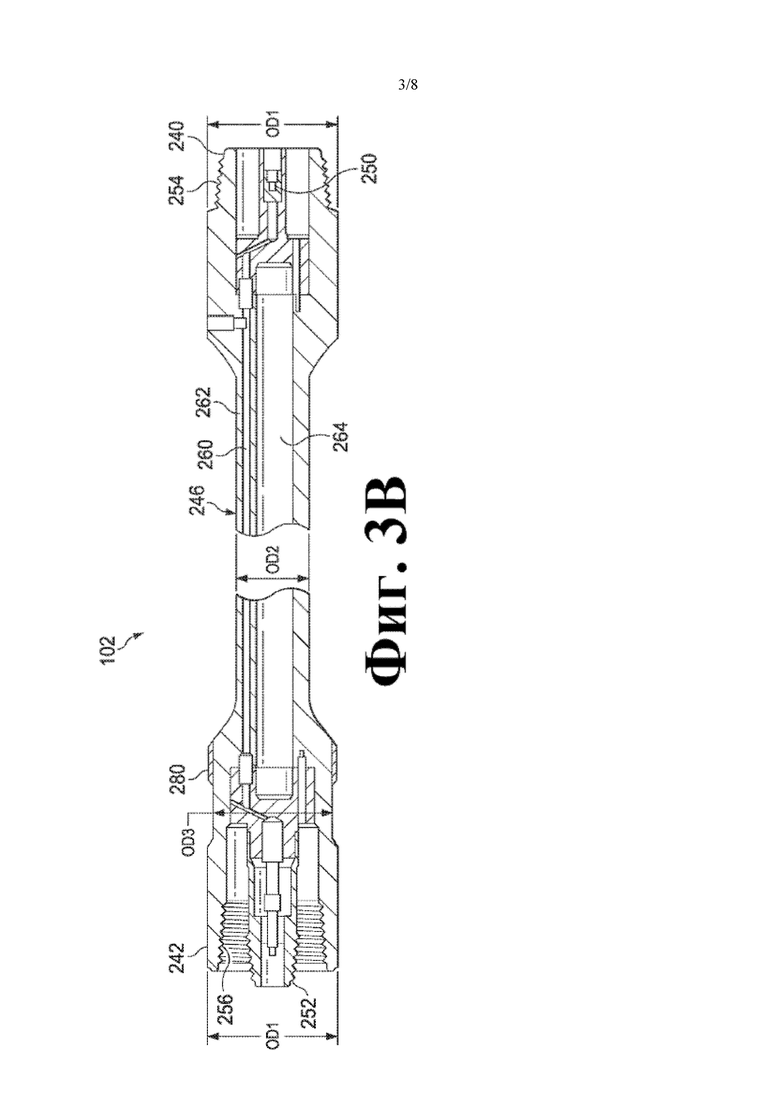
На Фиг. 3В проиллюстрирован вид в поперечном сечении гибкой утяжеленной бурильной трубы 102. Гибкая утяжеленная бурильная труба 102 обычно определяет первый наружный диаметр OD1 на своем переднем конце 240 и заднем конце 242. Первый наружный диаметр OD1 может быть аналогичен наружным диаметрам корпусов 122 (Фиг. 2) и 206 (Фиг. 3A) секции 110 контроля и секции 114 управления наклонно-направленным бурением. Часть 246 уменьшенного диаметра между передним и задним концами 240, 242 определяет второй наружный диаметр OD2, который меньше, чем первый наружный диаметр OD1. Часть 246 уменьшенного диаметра обеспечивает уменьшенную жесткость при изгибе гибкой утяжеленной бурильной трубы 102. В некоторых вариантах реализации изобретения часть 246 уменьшенного диаметра может постепенно переходить или сгибаться вниз или от переднего и заднего концов 240, 242. В других вариантах реализации изобретения гибкая утяжеленная бурильная труба 102 может быть реализована в формах, отличных от традиционного суженной секции утяжеленной бурильной трубы, такого как полностью шарнирное универсальное соединение. Чем меньше жесткость при изгибе гибкой утяжеленной бурильной трубы 102 или гибкой секции, тем больше РУС 200 инструмента (на Фиг. 3А) ведет себя как роторная управляемая система направления долота с потенциалом достижения очень высоких степеней жесткости резкого изгиба. Гибкая утяжеленная бурильная труба 102 может быть выполнена как сменная труба для конфигурации РУС 200 на основании требуемого отклика управления. Может потребоваться детальное моделирование, чтобы определить, необходима ли та или иная гибкая утяжеленная бурильная труба 102 или гибкая секция для достижения требуемой степени жесткости резкого изгиба для того или иного проекта. В случае, если изгибание не требуется, гибкую утяжеленную бурильную трубу 102 можно удалить (см. Фиг. 7).
В других вариантах реализации изобретения уменьшенная жесткость при изгибе гибкой утяжеленной бурильной трубы 102 может быть обеспечена другими геометрическими параметрами. Например, гибкая утяжеленная бурильная труба может быть сконструирована с постоянным наружным диаметром OD1, но с уменьшенной толщиной стенки относительно секции 110 контроля, секции 112 управления потоком или секции 114 управления наклонно-направленным бурением (Фиг. 3A). В качестве альтернативного или дополнительного варианта, в стенке гибкой утяжеленной бурильной трубы могут быть выполнены выемки или кольцевые канавки для обеспечения уменьшенной жесткости при изгибе. Кроме того, выбор материалов может обеспечить снижение жесткости при изгибе. Например, если секция 110 контроля, секция 112 управления потоком или корпус 206 секции 114 управления наклонно-направленным бурением выполнены из стали, гибкая утяжеленная бурильная труба может быть гибкой утяжеленной бурильной трубой 102, выполненной из титана или другого материала, более гибкого, чем сталь.
Пояс 280 износа может быть предусмотрен или нанесен на задний конец 242 гибкой утяжеленной бурильной трубы 102. Как проиллюстрировано на Фиг. 3B, пояс280 износа может быть расположен на части заднего конца 242, которая имеет уменьшенный третий диаметр OD3, который меньше первого наружного диаметра OD1 и больше второго наружного диаметра OD2. В других вариантах реализации изобретения (не проиллюстрированы) пояс 280 износа может быть нанесен на часть переднего конца 240 или заднего конца 242, которая определяет первый наружный диаметр OD1 или больший диаметр, чем OD1. Пояс 280 износа может защищать гибкую утяжеленную бурильную трубу 102 в случае контакта со стенкой 56 ствола 26 скважины (на Фиг. 1). Пояс 280 износа может содержать армирующий наплавочный материал, такой как матрица из карбида вольфрама. Пояс 280 износа может содержать металлическую соединительную муфту, которая путем прессовой посадки или горячей насадки насаживается на передний или задний концы 240, 242, например, около OD1 или OD3.
Передача данных и электрической энергии через гибкую утяжеленную бурильную трубу 102 может достигаться различными способами, например за счет проводного удлинителя, проходящего через гибкую секцию, электрических проводников, прикрепленных к гибкой утяжеленной бурильной трубе 102 или выполненных с ней как единое целое, или же беспроводной передачи энергии/данных на короткое расстояние, например электромагнитного, радиочастотного, гидроимпульсного, инфракрасного и/или оптического способа передачи. Как проиллюстрировано на Фиг. 3B, гибкая утяжеленная бурильная труба 102 содержит электрические соединители 250, 252 на переднем и заднем концах 240, 242 для облегчения соединения гибкой утяжеленной бурильной трубы 102 с другими секциями 110, 112, 114, 232 РУС 200. Соединители 250, 252 могут включать в себя поворотные муфты, например соединители, которые могут зацеплять соответствующие соединители в других секциях 110, 112, 114, 232 РУС посредством относительного вращательного движения между ними. В некоторых вариантах реализации изобретения конструктивные соединители 254, 256, такие как резьбы, могут быть предусмотрены для соединения гибкой утяжеленной бурильной трубы 102 с другими секциями 110, 112, 114, 232, так что относительное вращательное движение устанавливает как конструктивные, так и электрические соединения между гибкой утяжеленной бурильной трубой 102 и другими секциями 110, 112, 114, 232. В некоторых вариантах реализации изобретения соединители 250, 252 могут содержать 8-контактные вращающиеся соединители для обеспечения передачи данных и энергии через гибкую утяжеленную бурильную трубу 102. В зависимости от требований к питанию секции управления потоком может быть включена небольшой аккумулятор или компактный модуль генерирования энергии, например, на основе вибрации. В этом случае потребуется только передача данных, что облегчает беспроводное решение.
Соединители 250, 252 могут быть функционально связаны друг с другом с помощью электрического кабеля 222 (Фиг. 3A). В некоторых вариантах реализации изобретения продольное отверстие 260, просверленное ружейным сверлом, может быть предусмотрено в стенке 262 гибкой утяжеленной бурильной трубы 102. Продольное отверстие 260 может быть смещено в радиальном направлении от основного проходного канала 264 для потока, проходящего через гибкую утяжеленную бурильную трубу 102. Первичный проходной канал 264 для потока, возможно, также необходимо сместить в радиальном направлении относительно первого диаметра OD1 и/или второго диаметра OD2 и/или третьего диаметра OD3.
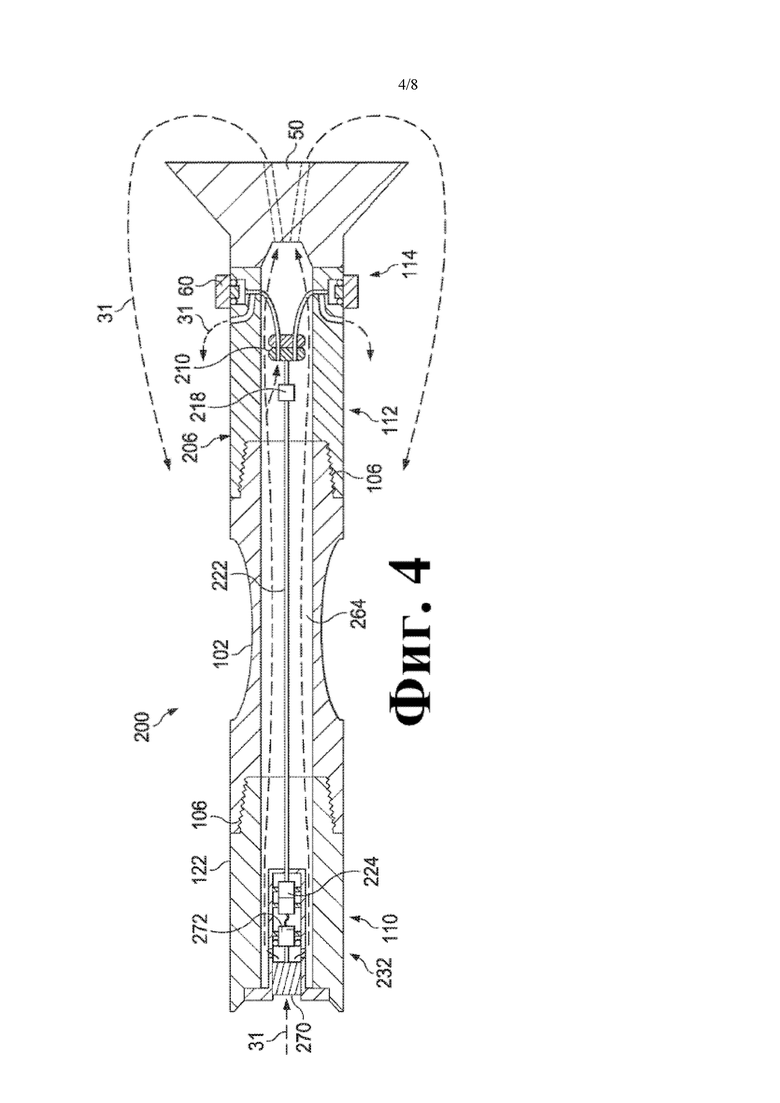
На Фиг. 4 представлен частичный вид сбоку в поперечном сечении РУС 200, иллюстрирующий проходящий через него проточный канал. Проточный канал проходит через гибкую утяжеленную бурильную трубу 102, которая присоединена между секцией 112 управления потоком и секцией 110 контроля. РУС 200 содержит конструктивные соединители 106 для приема гибкой утяжеленной бурильной трубы 102 между секцией 110 контроля и секцией 112 управления потоком. Как проиллюстрировано на Фиг. 4, силовой отсек 232 и секция 110 контроля размещены вместе во внешнем корпусе 122, а секция 112 управления потоком секции 114 управления наклонно-направленным бурением размещены вместе в корпусе 206. В некоторых вариантах реализации изобретения между силовым отсеком 232 и секцией 110 контроля, а также между секцией 112 управления потоком и секцией 114 управления наклонно-направленным бурением могут быть предусмотрены конструктивные соединители 106. Стабилизаторы 62 и 230 (Фиг. 3A), связанные с корпусами 122, 206, явным образом не проиллюстрированы на Фиг. 4.
Флюид или буровой раствор 31 поступает в силовой отсек 232 из бурильной колонны 20 (Фиг. 1). Буровой раствор 31 проходит через турбину 270, которая извлекает энергию из бурового раствора 31 для работы электрического генератора 272. Буровой раствор 31 проходит вокруг электрического генератора 272 и компонентов управления, таких как передающий блок 224 связи. Буровой раствор 31 поступает в первичный проходной канал 264 для потока гибкой утяжеленной бурильной трубы 102 и проходит в секцию 112 управления потоком. Узел 210 клапанов отводит часть бурового раствора 31, чтобы выборочно приводить в движение или выдвигать направляющие опорные подкладки 60, а остальная часть бурового раствора 31 продолжает течь к буровому долоту 50. Отведенная часть бурового раствора 31 вытесняется через корпус 206, а остальная часть бурового раствора выбрасывается через буровое долото 50.
При работе генератор 272 подает электропитание на электронное оборудование в секции 110 контроля, содержащей различные датчики и схемы, которые могут предоставлять команды для узла 210 клапанов. Команды и/или электропитание могут передаваться от передающего блока 224 связи принимающему блоку 218 связи через коммуникационный кабель 222. Затем клапан 210 может работать в соответствии с командами, полученными принимающим блоком 218 связи.
Как указано выше, секция 110 контроля содержит модульный блок 212 электронного оборудования (Фиг. 3A), содержащий комплекты датчиков НН (направления и наклона), ГК (гамма-каротажа) и других устройств, а также ЦП, систему управления параметрами электропитания и модули связи. Модульный силовой отсек 232 выработки/подачи электроэнергии также обычно расположен внутри секции 110 контроля. Для обеспечения простой диагностики и техобслуживания очень желательна высокая степень модульности в сочетании со встроенными средствами диагностики и памятью в каждом модуле 232, 110, 112, 114, чтобы обеспечить обнаружение неисправностей, отслеживание срока службы и накопительный сбор истории запусков.
На Фиг. 5 проиллюстрирован частичный вид сбоку в поперечном сечении РУС 300, содержащей контроллер 302, расположенный внутри ее гибкой утяжеленной бурильной трубы 304. Контроллер 302 может содержать любые датчики и компоненты управления, связанные с модульным блоком 212 датчиков и электронного оборудования (Фиг. 3A). Когда контроллер 302 может выдерживать изгибание гибкой утяжеленной бурильной трубы 304, общая длина РУС 300 может быть сокращена за счет использования свободного пространства гибкой утяжеленной бурильной трубы 304. Гибкую утяжеленную бурильную трубу 304 также могут использовать для установки датчиков для измерения и фиксирования параметров бурения, таких как нагрузка на долото (WOB), крутящий момент на долоте (TOB), изгибающий момент и нагрузки в направлении изгиба; важные данные, которые можно использовать для контроля направления.
В некоторых вариантах реализации изобретения тензодатчик (не проиллюстрирован) может быть включен в контроллер 302 для измерения изгиба гибкой утяжеленной бурильной трубы во время работы. Контроллер 302 проиллюстрирован как расположенный в части 310 с суженным или уменьшенным диаметром между передним и задним концами 312, 314 гибкой утяжеленной бурильной трубы 304. В других вариантах реализации изобретения контроллер 302 или части контроллера 302 могут быть расположены на переднем и заднем концах 312, 314. Контроллер 302 может быть соединен с принимающим блоком 218 связи посредством коммуникационного кабеля 222 и может быть соединен с генератором 272 посредством силового кабеля 320.
На Фиг. 6 проиллюстрирован вид сбоку в поперечном сечении РУС 400, содержащей комплект 402 датчиков динамического каротажа, расположенный под гибкой утяжеленной бурильной трубой 404, и комплект 406 датчиков стационарного каротажа, расположенный над гибкой утяжеленной бурильной трубой 404. Для улучшения управляемости и отклика РУС 400 выбранные датчики направления и наклона могут быть размещены в комплекте 402 датчиков динамического каротажа под гибкой утяжеленной бурильной трубой 404. Размещение комплекта 402 датчиков динамического каротажа под гибкой утяжеленной бурильной трубой 404, например, в секции 410 управления наклонно-направленным бурением, может обеспечить раннюю выдачу показаний в отношении выбираемого направления. Гибкая утяжеленная бурильная труба 404 в составе РУС 400 сделает РУС 400 очень гибкой и обеспечит возможность резкого изгиба. Данные об измерениях наддолотного направления и/или наклона могут быть предоставлены комплектом 402 датчиков динамического каротажа в секции 410 управления наклонно-направленным бурением (или в некоторых вариантах реализации изобретения в гибкой утяжеленной бурильной трубе 404) для измерения наклона и/или направления бурового долота 50 и/или других характеристик операции бурения. Комплект 406 датчиков стационарного каротажа может быть предусмотрен в секции 412 контроля для обеспечения функциональных возможностей ИПБ и/или КПБ и позволит разработать более сложную систему управления и функции автоматизации. Наддолотные измерения, получаемые от комплекта 402 датчиков динамического каротажа, могут быть более низкого качества и могут быть объединены с данными НН более высокого качества от комплекта 406 датчиков стационарного каротажа для принятия решений по управлению наклонно-направленным бурением. Дополнительный комплект 403 датчиков динамического каротажа может быть предусмотрен в секции 412 управления наклонно-направленным бурением для сопоставления во время бурения с данными комплекта 402 датчиков динамического каротажа в секции 410 управления наклонно-направленным бурением. Такое сопоставление может обеспечить раннюю выдачу показаний о локальной жесткости резкого изгиба, локальном направлении резкого изгиба, а также величине изгиба и направлении изгиба гибкой утяжеленной бурильной трубы 404. Добавление комплекта 403 датчиков динамического каротажа также обеспечивает дублирование комплекта 402 датчиков динамического каротажа для повышения надежности при проведении буровых работ.
Аналогичные конструктивные соединители 416 предусмотрены на передних концах гибкой утяжеленной бурильной трубы 404 и корпуса 420 секции 412 контроля. Кроме того, аналогичные электрические соединители 424 могут быть предусмотрены на передних концах гибкой утяжеленной бурильной трубы 404 и секции 412 контроля.
На Фиг. 7 проиллюстрирован вид сбоку в поперечном сечении РУС 400, с удаленной из нее гибкой утяжеленной бурильной трубой 404. Аналогичные конструктивные соединители 416 и электрические соединители 424 в РУС 400 обеспечивают прямое соединение между секцией 412 контроля и секцией 410 управления наклонно-направленным бурением в случае удаления гибкой утяжеленной бурильной трубы 404.
На Фиг. 8 проиллюстрирован схематический вид РУС 500, расположенной в стволе 502 скважины. РУС 500 содержит гибкую утяжеленную бурильную трубу 504, расположенную между ее секцией 508 управления наклонно-направленным бурением и секцией 510 контроля. Двигатель 512 клапана расположен в секции 510 контроля, и вал 514 двигателя клапана проходит через гибкую утяжеленную бурильную трубу 504 между двигателем 512 клапана и клапаном 520. Клапан 520 функционально связан с поршнем 522, который, в свою очередь, функционально связан с направляющей опорной подкладкой 524 для сцепления со стенкой 526 ствола 502 скважины для управления буровым долотом 530. Контроллер 532 управления может быть функционально связан с турбиной 534 и генератором 536 для получения от них электрической энергии. Контроллер 532 управления может управлять двигателем 512 клапана, который, в свою очередь, может передавать команды на клапан 520 в секции 508 управления наклонно-направленным бурением посредством механического перемещения вала 514 двигателя. Контроллер 532 управления может содержать комплект 540 датчиков стационарного каротажа.
На Фиг. 9 проиллюстрирован схематический вид РУС 600, расположенной в стволе 602 скважины. РУС 600 содержит гибкую утяжеленную бурильную трубу 604, расположенную между ее секцией 608 управления наклонно-направленным бурением и секцией 610 контроля. Двигатель 612 клапана расположен в секции 608 управления наклонно-направленным бурением и соединен с контроллером 614 управления через линию 616 питания/управления, проходящую через гибкую утяжеленную бурильную трубу 604. Линия 616 питания/управления может проходить через трубопровод 618, который изолирует линию 616 питания/управления от буровых растворов 31 (Фиг. 1). В контроллере 614 управления может быть предусмотрен комплект датчиков ориентации/каротажа или комплект 620 датчиков стационарного каротажа, а вторичный комплект датчиков ориентации/каротажа или комплект 622 датчиков динамического каротажа может быть расположен на противоположной стороне гибкой утяжеленной бурильной трубы 604 в секции 608 управления наклонно-направленным бурением. Вторичный комплект датчиков ориентации/каротажа или комплект 622 датчиков динамического каротажа является необязательным и может иметь более высокий динамический диапазон, но меньшую точность, чем верхняя компоновка датчиков ориентации/каротажа или комплект 620 датчиков стационарного каротажа в секции 610 контроля. Как правило, вторичная компоновка датчиков ориентации/каротажа может использоваться при вращении бурильной колонны 20 (Фиг. 1) во время бурения для проведения измерений под гибкой утяжеленной бурильной трубой 604. Данные от комплектов 620, 622 датчиков стационарного и динамического каротажа, включая наклон и азимут, можно сопоставить друг с другом, чтобы определить величину разницы между ними, а также определить величину изгиба и, следовательно, кривизну в стволе 602 скважины.
Турбина 634 и генератор 636 могут быть предусмотрены для подачи электрической энергии на контроллер 614 управления, который может распределять мощность между комплектами 620, 622 датчиков стационарного и динамического каротажа и двигателем 612 клапана. Двигатель 612 клапана функционально связан с клапаном 640 посредством вала 642 двигателя клапана. Клапан 640 может быть связан с поршнем 643, который, в свою очередь, функционально связан с направляющей опорной подкладкой 644 для зацепления со стенкой 646 ствола 602 скважины для управления буровым долотом 650.
Аспекты изобретения, описанные ниже, предоставлены для описания в упрощенном виде выбора концепций, которые описаны более подробно выше. Данный раздел не предназначен для определения ключевых признаков или существенных признаков заявленного объекта изобретения и не предназначен для использования в качестве помощи в определении объема заявленного объекта изобретения.
В одном аспекте изобретение относится к роторной управляемой системе. Роторная управляемая система содержит секцию управления наклонно-направленным бурением, соединяемый с буровым долотом. Участок управления наклонно-направленным бурением определяет продольную ось и содержит по меньшей мере одну направляющую опорную подкладку, избирательно выдвигаемую в боковом направлении от продольной оси. Роторная управляемая система также содержит секцию контроля, которая содержит контроллер управления. Контроллер управления выполнен с возможностью формирования команд для выборочного выдвижения по меньшей мере одной опорной подкладки. Роторная управляемая система также содержит гибкую утяжеленную бурильную трубу, присоединенную между секцией управления и секцией контроля. Гибкая утяжеленная бурильная труба имеет пониженную жесткость при изгибе относительно секции управления наклонно-направленным бурением и секции контроля.
В одном или более приведенных в качестве примера вариантах реализации изобретения гибкая утяжеленная бурильная труба содержит центральную часть уменьшенного диаметра между передним и задним концами гибкой утяжеленной бурильной трубы. Центральная часть уменьшенного диаметра определяет наружный диаметр, который меньше наружного диаметра переднего и заднего концов. Гибкая утяжеленная бурильная труба может содержать проходящий через нее первичный проточный канал и продольное отверстие, смещенное в радиальном направлении от первичного проточного канала. Продольное отверстие может проходить через стенку участка уменьшенного диаметра. Гибкая утяжеленная бурильная труба может содержать электрический проводник, проходящий через продольное отверстие, причем электрический проводник функционально соединен между передающим блоком связи в секции контроля и принимающим блоком связи в секции управления наклонно-направленным бурением.
В некоторых вариантах реализации изобретения каждый из секции контроля и гибкой утяжеленной бурильной трубы содержит аналогичные конструктивные соединители на их соответствующих передних концах для избирательного соединения с секцией управления наклонно-направленным бурением. В некоторых вариантах реализации изобретения каждый из секции контроля и гибкой утяжеленной бурильной трубы содержит аналогичные электрические соединители на соответствующих передних концах для избирательного соединения с принимающим блоком связи.
В одном или более приведенных в качестве примера вариантах реализации изобретения секция контроля содержит стабилизатор, проходящий в радиальном направлении от корпуса секции контроля. В некоторых вариантах реализации изобретения секция управления наклонно-направленным бурением также содержит ведущий стабилизатор, проходящий в радиальном направлении от корпуса секции управления наклонно-направленным бурением.
В некоторых вариантах реализации изобретения контроллер управления связывается по беспроводной связи с принимающим блоком связи через гибкую утяжеленную бурильную трубу посредством электромагнитных, радиочастотных сигналов, гидроимпульсной связи, инфракрасного, оптического и/или других типов сигналов. В некоторых вариантах реализации изобретения гибкая утяжеленная бурильная труба содержит блок электронного оборудования, и блок электронного оборудования может использоваться для управления по меньшей мере одной направляющей опорной подкладкой в секции управления наклонно-направленным бурением.
В одном или более приведенных в качестве примера вариантах реализации изобретения секция управления наклонно-направленным бурением содержит комплект датчиков стационарного каротажа для обеспечения функциональных возможностей ИПБ и/или КПБ, а также секция управления наклонно-направленным бурением содержит комплект датчиков динамического каротажа для измерения наклона бурового долота и/или других характеристик буровой операции в процессе эксплуатации. Комплект датчиков динамического каротажа может быть менее точным, чем комплект датчиков стационарного каротажа.
В некоторых вариантах реализации изобретения секция управления наклонно-направленным бурением содержит множество направляющих опорных подкладок, расположенных по окружности на некотором расстоянии друг от друга, и комплект клапанов, предназначенный для отвода части бурового раствора на направляющие опорные подкладки. В некоторых приведенных в качестве примера вариантах реализации изобретения секция контроля содержит двигатель клапана, функционально связанный с контроллером управления, и при этом гибкая утяжеленная бурильная труба содержит гибкий механический вал, проходящий через нее и функционально связанный между двигателем клапана в секции контроля и клапаном, установленным в секции управления наклонно-направленным бурением.
В другом аспекте изобретение относится к системе роторного бурения. Система роторного бурения содержит бурильную колонну, буровое долото и корпус управления, соединенный с передним концом бурильной колонны. Система роторного бурения также содержит контроллер управления, расположенный внутри корпуса управления, причем контроллер управления выполнен с возможностью формирования команд для управления буровым долотом. Система роторного бурения также содержит корпус управления, определяющий продольную ось и соединенный с верхним концом бурового долота, и по меньшей мере одну направляющую опорную подкладку, избирательно выдвигаемую из корпуса управления в ответ на команды от контроллера управления. Система роторного бурения также содержит гибкую утяжеленную бурильную трубу, присоединенную между корпусом контроля и корпусом управления. Гибкая утяжеленная бурильная труба имеет пониженную жесткость при изгибе относительно корпуса контроля и корпуса управления.
В одном или более приведенных в качестве примера вариантах реализации изобретения гибкая утяжеленная бурильная труба содержит передний и задний концы, определяющие первый наружный диаметр, аналогичный наружному диаметру корпусов управления и контроля, и гибкая утяжеленная бурильная труба содержит суженную часть с уменьшенным диаметром между передним и задним концами. Часть с уменьшенным диаметром может определять второй наружный диаметр, который меньше, чем первый наружный диаметр. В некоторых вариантах реализации изобретения гибкая утяжеленная бурильная труба содержит первичный проточный канал, находящийся в гидравлической связи с бурильной колонной, и продольное отверстие, смещенное в радиальном направлении от первичного проточного канала и содержащее электропроводный кабель, проходящий через него для передачи команд от контроллера управления через гибкую утяжеленную бурильную трубу. В некоторых вариантах реализации изобретения система роторного бурения дополнительно содержит комплект датчиков стационарного каротажа, расположенный внутри корпуса контроля, датчик динамического каротажа, расположенный в корпусе управления, и поверхностный блок управления, функционально связанный с комплектами датчиков стационарного и динамического каротажа для приема измерений направления и наклона бурового долота.
В другом аспекте изобретение относится к способу бурения ствола скважины. Способ включает: (а) транспортировку роторной управляемой системы в ствол скважины, (б) формирование команд по управлению буровым долотом, соединенным с нижним концом роторной управляемой системы контроллером управления, расположенным внутри корпуса управления роторной управляемой системы, (в) передачу команд по гибкой утяжеленной бурильной трубе роторной управляемой системы, причем гибкая утяжеленная бурильная труба имеет пониженную жесткость при изгибе относительно корпуса управления, и (г) выдвижение по меньшей мере одной направляющей опорной подкладки из корпуса управления роторной управляемой системы, присоединенной под гибкой утяжеленной бурильной трубой, в ответ на получение команд от контроллера управления под гибкой утяжеленной бурильной трубой.
В некоторых приведенных в качестве примера вариантах реализации изобретения способ дополнительно включает: удаление гибкой утяжеленной бурильной трубы из роторной управляемой системы и соединение корпуса контроля непосредственно с корпусом управления. В некоторых вариантах реализации изобретения способ дополнительно включает: измерение направления и наклона бурового долота с помощью комплекта датчиков стационарного каротажа, расположенного над гибкой утяжеленной бурильной трубой, и измерение направления и наклона бурового долота с помощью комплекта датчиков динамического каротажа, расположенного над гибкой утяжеленной бурильной трубой. В некоторых вариантах реализации изобретения способ дополнительно включает: измерение направления и наклона бурового долота с помощью дополнительного комплекта датчиков динамического каротажа, расположенного над гибкой утяжеленной бурильной трубой, и сопоставление измерений, выполненных над гибкой утяжеленной бурильной трубой, с измерениями, выполненными под гибкой утяжеленной бурильной трубой.
Реферат изобретения предназначен исключительно для того, чтобы предоставить Ведомству по патентам и товарным знакам США и широкой общественности способ быстрого определения путем краткого ознакомления с характером и сущностью технического раскрытия, и он представляет собой только один или более примеров.
Хотя были подробно проиллюстрированы различные примеры, данное изобретение не ограничено проиллюстрированными примерами. Специалистам в данной области техники могут быть очевидны модификации и адаптации вышеприведенных примеров. Такие модификации и адаптации подпадают под объем данного изобретения.
Группа изобретений относится к роторным управляемым системам (РУС), например к буровым системам, используемым для наклонно-направленного бурения стволов скважин при разведке и добыче нефти и газа. РУС содержит секцию управления наклонно-направленным бурением, соединенную с буровым долотом. Секция управления наклонно-направленным бурением содержит по меньшей мере одну направляющую опорную подкладку. Подкладка избирательно выдвигается в боковом направлении от продольной оси. Секция контроля содержит контроллер управления. Гибкая утяжеленная бурильная труба соединяет секцию управления наклонно-направленным бурением и секцию контроля. Для осуществления способа бурения ствола скважины транспортируют роторную управляемую систему в ствол скважины. Формируют команды по управлению буровым долотом с помощью контроллера управления. Передают команды через гибкую утяжеленную бурильную трубу роторной управляемой системы. Обеспечивают выдвижение по меньшей мере одной направляющей опорной подкладки из корпуса управления роторной управляемой системы в ответ на получение команд от контроллера управления под гибкой утяжеленной бурильной трубой. Достигается технический результат – уменьшение изгибов радиуса поворота. 3 н. и 12 з.п. ф-лы, 9 ил.
1. Роторная управляемая система, содержащая:
секцию управления наклонно-направленным бурением, соединяемую с буровым долотом, причем секция управления наклонно-направленным бурением определяет продольную ось и содержит по меньшей мере одну направляющую опорную подкладку, избирательно выдвигаемую в боковом направлении от продольной оси;
секцию контроля, содержащую находящийся в ней контроллер управления, при этом контроллер управления для формирования команд для выборочного выдвижения по меньшей мере одной направляющей опорной подкладки; и
гибкую утяжеленную бурильную трубу, соединенную между секцией управления наклонно-направленным бурением и секцией контроля, причем гибкая утяжеленная бурильная труба имеет меньшую жесткость при изгибе, чем секция управления наклонно-направленным бурением и секция контроля.
2. Роторная управляемая система по п. 1, отличающаяся тем, что гибкая утяжеленная бурильная труба содержит центральную часть уменьшенного диаметра между передним и задним концами гибкой утяжеленной бурильной трубы.
3. Роторная управляемая система по п. 2, отличающаяся тем, что гибкая утяжеленная бурильная труба содержит первичный проточный канал, проходящий через нее, и продольное отверстие, смещенное в радиальном направлении от первичного проточного канала и проходящее через стенку суженной части.
4. Роторная управляемая система по п. 3, отличающаяся тем, что гибкая утяжеленная бурильная труба содержит электрический проводник, проходящий через продольное отверстие, причем электрический проводник функционально связан между передающим блоком связи в секции контроля и принимающим блоком связи в секции управления наклонно-направленным бурением.
5. Роторная управляемая система по любому из предшествующих пунктов, отличающаяся тем, что каждая из секции контроля и гибкой утяжеленной бурильной трубы содержит аналогичные конструктивные соединители на своих соответствующих передних концах для избирательного соединения с секцией управления наклонно-направленным бурением, и при этом каждая из секции контроля и гибкой утяжеленной бурильной трубы содержит аналогичные электрические соединители на своих соответствующих передних концах для выборочного соединения с принимающим блоком связи.
6. Роторная управляемая система по любому из предшествующих пунктов, отличающаяся тем, что секция контроля содержит стабилизатор, проходящий в радиальном направлении от корпуса секции контроля, и необязательно отличающаяся тем, что секция управления наклонно-направленным бурением содержит ведущий стабилизатор, проходящий в радиальном направлении от корпуса секции управления наклонно-направленным бурением.
7. Роторная управляемая система по любому из предшествующих пунктов, отличающаяся тем, что контроллер управления осуществляет беспроводную связь с принимающим блоком связи через гибкую утяжеленную бурильную трубу посредством электромагнитных, радиочастотных сигналов, гидроимпульсов, инфракрасных, оптических и/или других типов сигналов, и/или отличающаяся тем, что гибкая утяжеленная бурильная труба содержит блок электронного оборудования, причем блок электронного оборудования выполнен с возможностью управления по меньшей мере одной направляющей опорной подкладкой в секции управления наклонно-направленным бурением.
8. Роторная управляемая система по любому из предшествующих пунктов, отличающаяся тем, что секция контроля содержит комплект датчиков стационарного каротажа для обеспечения функциональных возможностей ИПБ и/или КПБ, а секция управления наклонно-направленным бурением содержит комплект датчиков динамического каротажа для измерения наклона бурового долота и/или других характеристик операции бурения при эксплуатации, при этом роторная управляемая система необязательно дополнительно содержит дополнительный комплект датчиков динамического каротажа, расположенный в секции контроля над гибкой утяжеленной бурильной трубой, и при этом комплект датчиков динамического каротажа и дополнительный комплект датчиков динамического каротажа менее точны, чем комплект датчиков стационарного каротажа.
9. Роторная управляемая система по любому из предшествующих пунктов, отличающаяся тем, что секция управления наклонно-направленным бурением содержит множество направляющих опорных подкладок, разнесенных друг от друга по окружности, и комплект клапанов, предназначенный для отвода части потока бурового раствора на направляющие опорные подкладки, и необязательно отличающаяся тем, что секция контроля содержит- двигатель клапана, функционально связанный с контроллером управления, и при этом гибкая утяжеленная бурильная труба содержит гибкий механический вал, проходящий через нее и функционально соединенный между двигателем клапана в секции контроля и клапаном, установленным в секции управления наклонно-направленным бурением.
10. Роторная управляемая система, содержащая:
бурильную колонну;
буровое долото;
корпус контроля, соединенный с передним концом бурильной колонны;
контроллер управления, расположенный внутри корпуса контроля, причем контроллер управления выполнен с возможностью формирования команд для управления буровым долотом;
корпус управления, определяющий продольную ось и соединенный с верхним концом бурового долота;
по меньшей мере одну направляющую опорную подкладку, выборочно выдвигаемую из корпуса управления в ответ на команды от контроллера управления; и
гибкую утяжеленную бурильную трубу, соединенную между корпусом контроля и корпусом управления, причем гибкая утяжеленная бурильная труба имеет уменьшенную жесткость при изгибе относительно корпуса контроля и корпуса управления.
11. Роторная управляемая система по п. 10, отличающаяся тем, что гибкая утяжеленная бурильная труба содержит либо (i) передний и задний концы, определяющие первый наружный диаметр, аналогичный наружному диаметру корпусов управления и контроля, и при этом гибкая утяжеленная бурильная труба содержит часть уменьшенного диаметра между передним и задним концами, причем часть уменьшенного диаметра определяет второй наружный диаметр, который меньше, чем первый наружный диаметр, либо (ii) первичный проточный канал, находящийся в гидравлической связи с бурильной колонной, и продольное отверстие, смещенное в радиальном направлении от первичного проточного канала и содержащее электропроводящий кабель, проходящий через него для передачи команд от контроллера управления через гибкую утяжеленную бурильную трубу.
12. Роторная управляемая система по п. 10, дополнительно содержащая комплект датчиков стационарного каротажа, расположенный внутри корпуса контроля, датчик динамического каротажа, расположенный внутри корпуса управления, и поверхностный блок управления, функционально связанный с комплектами датчиков стационарного и динамического каротажа для получения измерений направления и наклона бурового долота.
13. Способ бурения ствола скважины, включающий:
транспортирование роторной управляемой системы в ствол скважины;
формирование команд по управлению буровым долотом, соединенным с нижним концом роторной управляемой системы с помощью контроллера управления, расположенного внутри корпуса контроля роторной управляемой системы;
передачу команд через гибкую утяжеленную бурильную трубу роторной управляемой системы, причем данная гибкая утяжеленная бурильная труба имеет уменьшенную жесткость при изгибе относительно корпуса контроля; и
выдвижение по меньшей мере одной направляющей опорной подкладки из корпуса управления роторной управляемой системы, соединенной под гибкой утяжеленной бурильной трубой, в ответ на получение команд от контроллера управления под гибкой утяжеленной бурильной трубой.
14. Способ по п. 13, дополнительно включающий измерение направления и наклона бурового долота с помощью комплекта датчиков стационарного каротажа, расположенного над гибкой утяжеленной бурильной трубой, и измерение направления и наклона бурового долота с помощью комплекта датчиков динамического каротажа, расположенного под гибкой утяжеленной бурильной трубой.
15. Способ по п. 14, дополнительно включающий измерение направления и наклона бурового долота с помощью дополнительного комплекта датчиков динамического каротажа, расположенного над гибкой утяжеленной бурильной трубой, и сопоставление измерений, выполненных над гибкой утяжеленной бурильной трубой, с измерениями, выполненными под гибкой утяжеленной бурильной трубой.
| US 20110067925 A1, 24.03.2011 | |||
| US 20150107902 A1, 23.04.2015 | |||
| US 20120018225 A1, 26.01.2012 | |||
| НАПРАВЛЕННОЕ БУРЕНИЕ С ПРИМЕНЕНИЕМ ВРАЩАЮЩЕГОСЯ КОРПУСА И СЕЛЕКТИВНО ОТКЛОНЯЮЩЕГОСЯ ПРИВОДНОГО ВАЛА | 2012 |
|
RU2602851C1 |
| Вентиль для пневматических шин | 1930 |
|
SU18610A1 |

