ПЕРЕКРЕСТНАЯ ССЫЛКА НА РОДСТВЕННУЮ(ЫЕ) ЗАЯВКУ(И)
Данная заявка испрашивает приоритет по предварительной заявке на патент США №62/513,365, поданной 31 мая 2017 г., озаглавленной «Strategic Flexible Section for a Rotary Steerable System», раскрытие которой полностью включено в данный документ посредством ссылки.
УРОВЕНЬ ТЕХНИКИ
Данное изобретение в целом относится к роторным управляемым системам (РУС), например, к буровым системам, используемым для направленного бурения стволов скважин при разведке и добыче нефти и газа. Более конкретно, варианты реализации изобретения относятся к роторным управляемым системам, имеющим гибкую муфту для достижения требуемых радиусов управления направлением бурения.
Операции направленного бурения включают контроль направления ствола скважины во время бурения. Обычно целью направленного бурения является достижение целевого подземного пункта назначения с помощью бурильной колонны, и часто буровую колонну необходимо будет поворачивать на строго заданный радиус, чтобы достичь целевого пункта назначения. Как правило, РУС изменяет направление либо путем толкания одной стороны стенки ствола скважины с помощью направляющих опорных подкладок, чтобы тем самым заставить буровое долото отклоняться на противоположную сторону (в системе отклонения долота), либо путем изгиба основного вала, проходящего через невращающийся корпус для направления бурового долота в определенном направлении относительно остальной части инструмента (в системе направления долота). В системе отклонения долота стенка ствола скважины обычно находится в контакте с буровым долотом, направляющими опорными подкладками и стабилизатором. Способность управления направлением бурения такой системы преимущественно определяется кривой, которая может быть установлена через каждое из бурового долота, направляющих опорных подкладок и стабилизатора.
КРАТКОЕ ОПИСАНИЕ ГРАФИЧЕСКИХ МАТЕРИАЛОВ
Данное изобретение подробно описано далее только в качестве примера на основе примеров, представленных на прилагаемых фигурах, в которых:
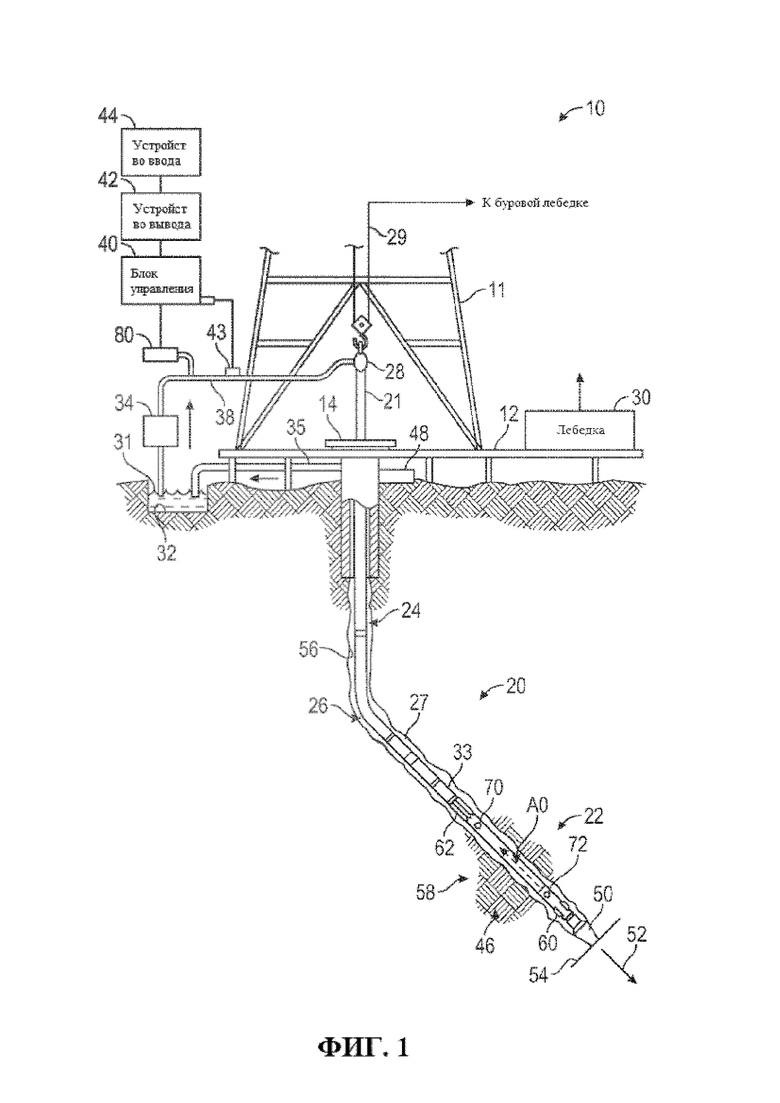
на фиг. 1 проиллюстрирован частичный вид сбоку в поперечном сечении направленного ствола скважины, пробуренного с помощью компоновки низа бурильной колонны, содержащей РУС;
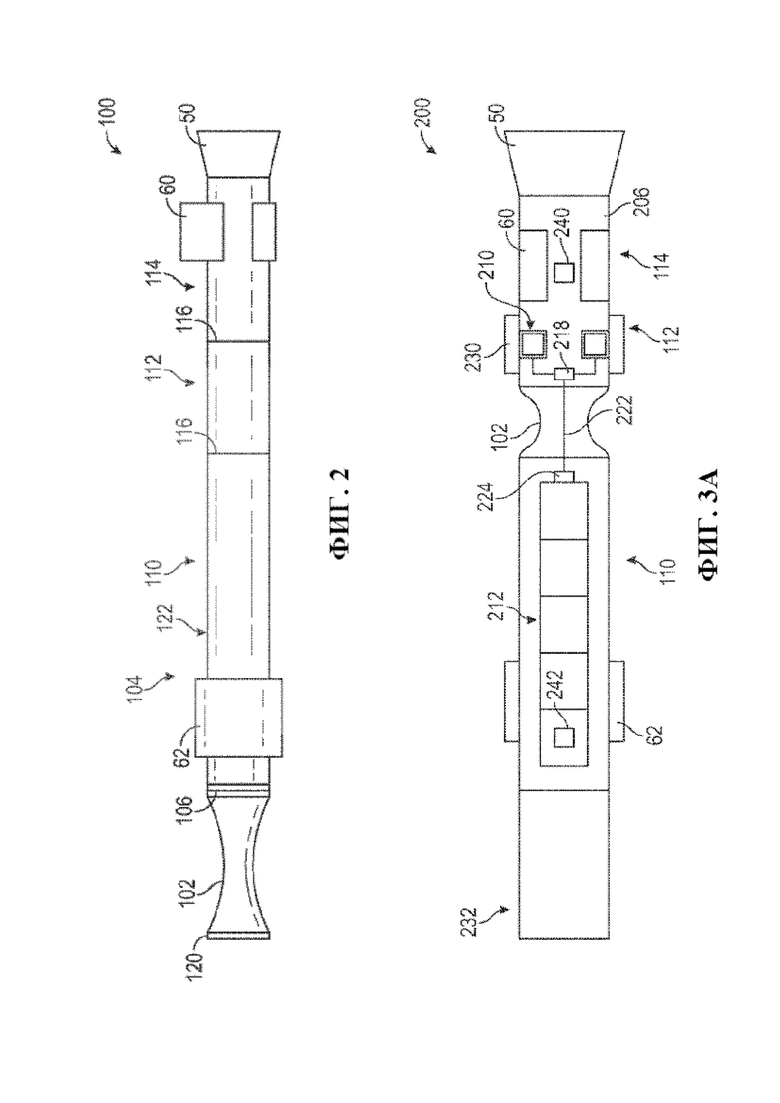
на фиг. 2 проиллюстрирован схематический вид компоновки низа бурильной колонны, содержащей гибкую муфту, соединенную с расположенным выше по стволу концом РУС;
на фиг. 3А проиллюстрирован схематический вид РУС, имеющей гибкую муфту, соединенную между секцией управления направлением бурения и секцией управления;
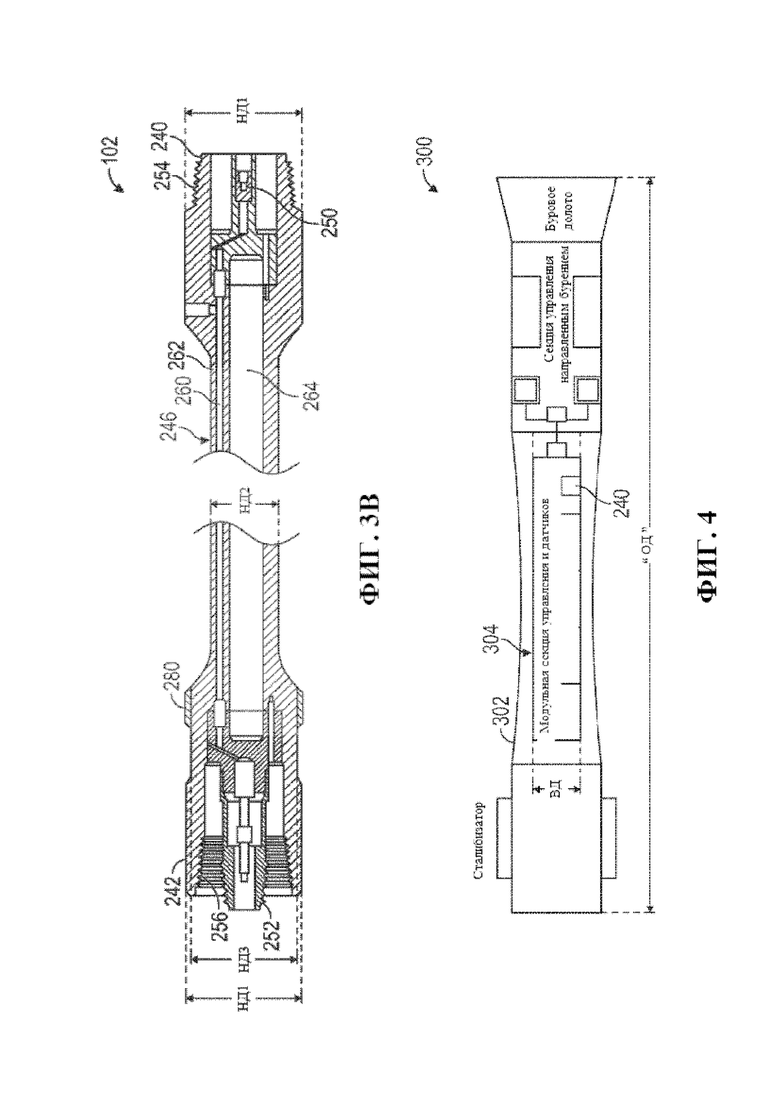
на фиг. 3В проиллюстрирован вид в поперечном сечении гибкой муфты в соответствии с фиг. 3А
на фиг. 4 проиллюстрирован схематический вид РУС, имеющей гибкую муфту, при этом компоненты управления расположены внутри гибкой муфты;
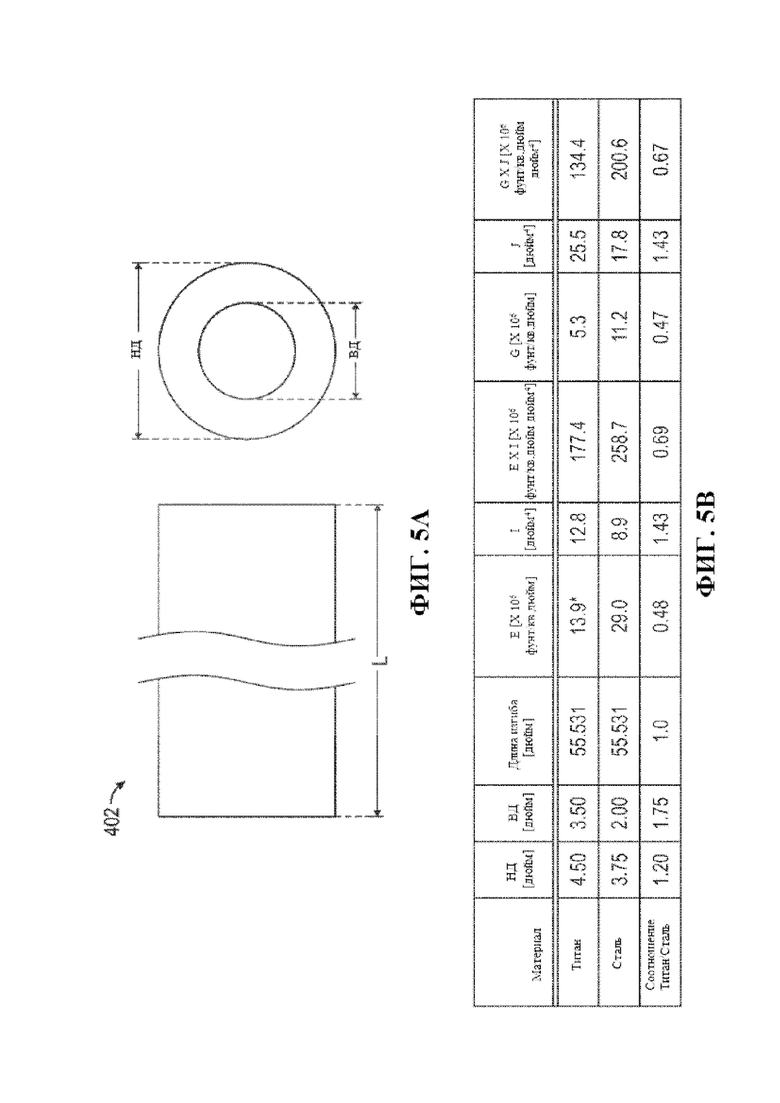
на фиг. 5А проиллюстрирован схематический вид приведенной в качестве примера гибкой муфты, имеющей преимущественно цилиндрическую конфигурацию;
на фиг. 5В показана таблица, иллюстрирующая геометрические характеристики и характеристики жесткости двух приведенных в качестве примера гибких муфт, выполненных как гибкая муфта в соответствии с фиг. 5А и изготовленных из разных материалов (стали и титана);
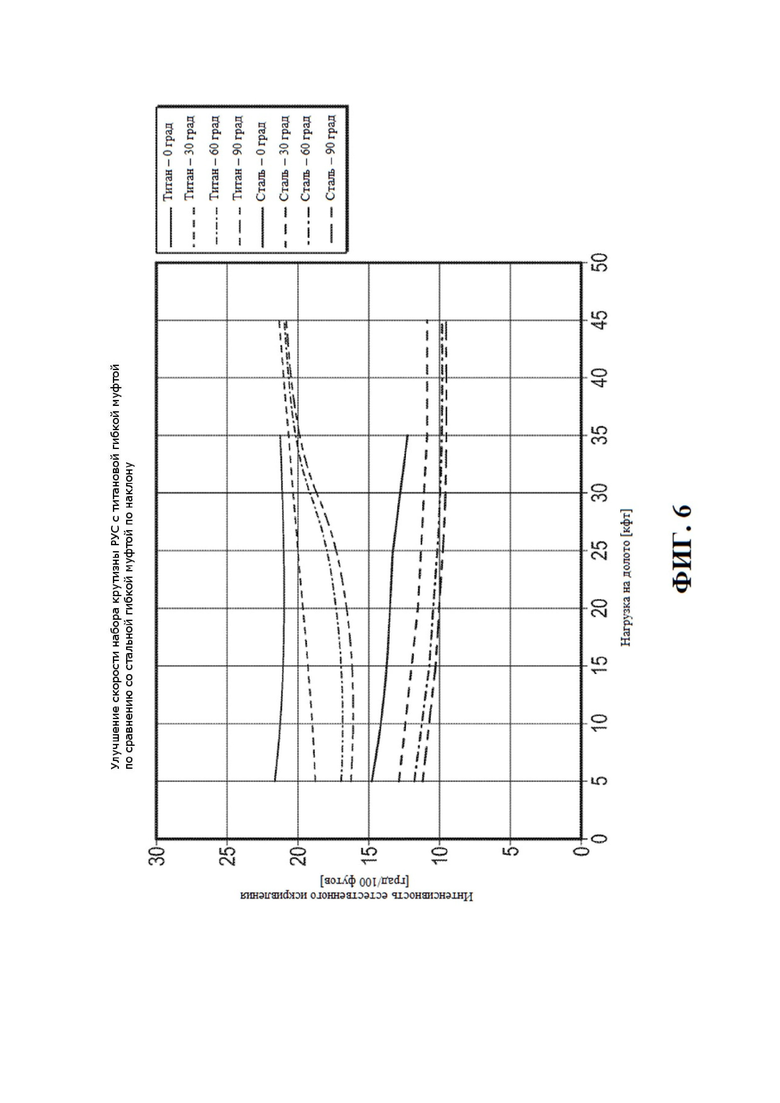
на фиг. 6 представлено графическое изображение, иллюстрирующее интенсивность искривления, достижимую с помощью двух приведенных в качестве примера гибких муфт в соответствии с фиг. 5В как функция нагрузки на долото при различных наклонах, показывающих улучшенные возможности темпа набора кривизны ствола скважины;
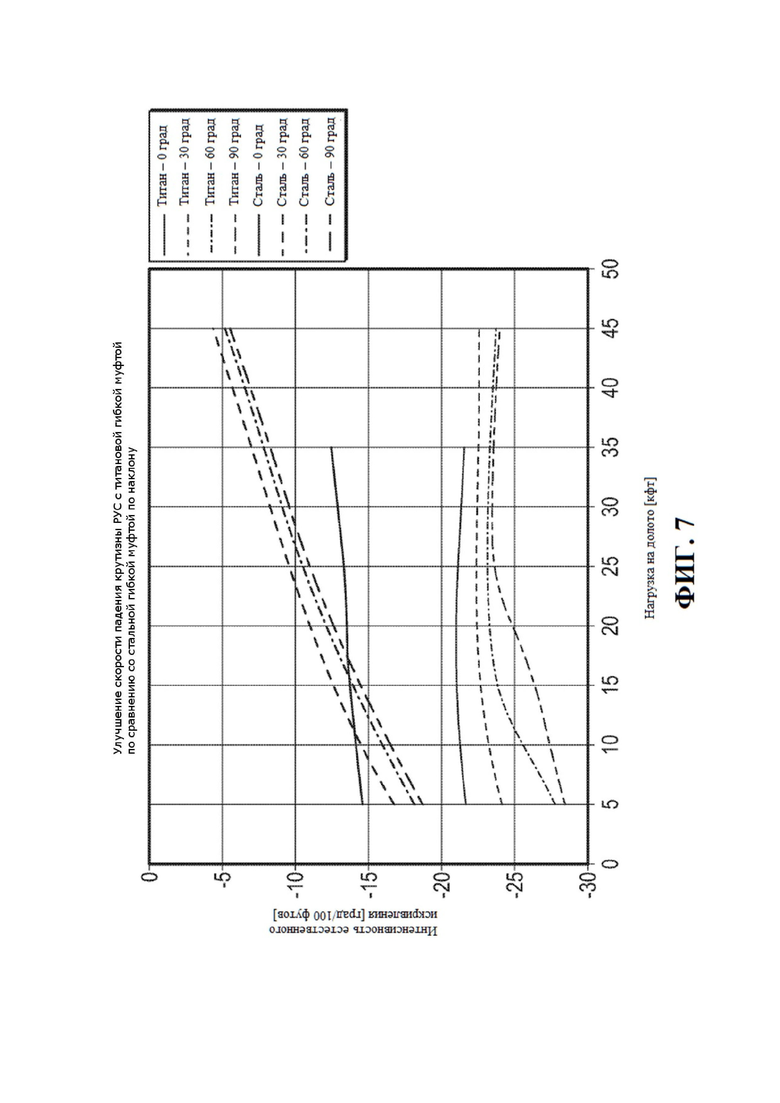
на фиг. 7 представлено графическое изображение, иллюстрирующее интенсивность искривления, достижимую с помощью двух приведенных в качестве примера гибких муфт в соответствии с фиг. 5В, как функция нагрузки на долото при различных наклонах, иллюстрирующих улучшенные возможности темпа снижения кривизны ствола скважины; а также
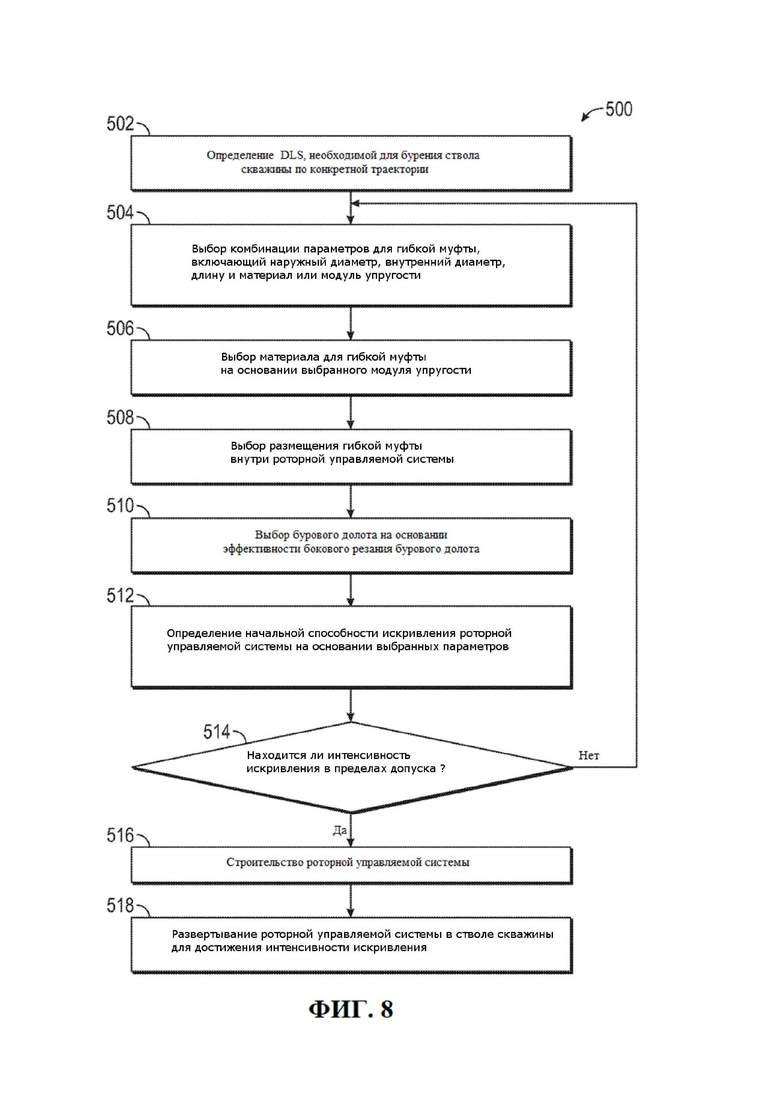
на фиг. 8 представлена блок-схема последовательности операций, показывающая процесс конфигурации и конструирования роторной управляемой системы.
ПОДРОБНОЕ ОПИСАНИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
Данное изобретение включает РУС, имеющую гибкую муфту, соединенную внутри нее, которая позволяет достичь требуемого радиуса поворота. Гибкая муфта может быть расположена на расположенном выше по стволу конце компоновки низа бурильной колонны, содержащем РУС, или, альтернативно, гибкая муфта может быть расположена между секцией управления направлением бурения и контроллером РУС. Параметры, влияющие на геометрические характеристики и характеристики жесткости гибкой муфты, могут быть выбраны стратегически, чтобы соответствовать требованиям конкретного ствола скважины. Кроме того, буровое долото для роторной управляемой системы может быть выбрано таким образом, чтобы эффективность бокового резания бурового долота вместе с характеристиками размещения и жесткости гибкой муфты была выбрана стратегически для соответствия требованиям бурения конкретного ствола скважины. При стратегическом выборе этих параметров могут быть достигнуты улучшения, связанные с длиной инструмента, жесткостью при изгибе, напряжением при изгибе, жесткостью при кручении, напряжением при сдвиге из-за скручивания и увеличенным допуском интенсивности искривления.
На фиг. 1 проиллюстрирован частичный вид сбоку в поперечном сечении направленного ствола скважины, пробуренного компоновкой низа бурильной колонны (КНБК), содержащей РУС. Показана приведенная в качестве примера система 10 направленного бурения, содержащая башню или «буровую вышку» 11, которая опирается на пол 12 буровой вышки. Пол 12 буровой вышки поддерживает роторный стол 14, который приводится в движение с требуемой скоростью вращения, например, посредством системы цепного привода через работу первичного двигателя (не показан). Роторный стол 14, в свою очередь, обеспечивает необходимую вращательную силу для бурильной колонны 20. Бурильная колонна 20, которая содержит секцию 24 бурильной трубы, проходит вниз от роторного стола 14 в направленную буровую скважину или ствол 26 скважины. Ствол 26 скважины может иметь многомерный путь или «траекторию». Трехмерное направление забоя 54 ствола 26 скважины на фиг. 1 представлено стрелкой 52.
Буровое долото 50 прикреплено к дистальному скважинному концу бурильной колонны 20. При вращении, например, посредством роторного стола 14 буровое долото 50 действует для разрушения и, как правило, измельчения геологического пласта 46. Бурильная колонна 20 соединена с подъемным устройством 30 «буровой лебедки», например, посредством ведущей бурильной трубы 21, вертлюжного соединения 28 и линии 29 через талевую систему (не показана). Во время операции бурения буровая лебедка 30 может работать, в некоторых вариантах реализации изобретения, для управления нагрузкой на буровое долото 50 и скоростью проходки бурильной колонны 20 в ствол 26 скважины.
Во время операций бурения подходящая буровая жидкость или «буровой раствор» 31 может циркулировать под давлением из емкости 32 для хранения бурового раствора в ствол 26 скважины через бурильную колонну 20 с помощью гидравлического «бурового насоса» 34. Буровой раствор 31 поступает из бурового насоса 34 в бурильную колонну 20 через трубопровод для подачи жидкости (обычно называемый «трубопроводом для бурового раствора») 38 и ведущую бурильную трубу 21. Буровой раствор 31 выпускается в забое 54 ствола скважины через отверстие или насадку в буровом долоте 50 и циркулирует в направлении «вверх по стволу скважины» к поверхности через кольцевое пространство 27 между бурильной колонной 20 и стенкой 56 ствола 26 скважины. Когда буровой раствор 31 приближается к роторному столу 14, он выпускается через возвратный трубопровод 35 в емкость 32 для хранения бурового раствора. Различные наземные датчики 48, которые соответственно развернуты на поверхности ствола 26 скважины, работают отдельно или в сочетании со скважинными датчиками 70, 72, развернутыми внутри ствола 26 скважины, для предоставления информации о различных связанных с бурением параметрах, таких как скорость потока флюида, нагрузка на долото, нагрузка на крюк и т.д.
наземный блок 40 управления может принимать сигналы от наземных и скважинных датчиков (например, датчиков 48, 70, 72) и устройств через датчик или преобразователь 43, который может быть размещен на трубопроводе 38 для подачи жидкости. Наземный блок 40 управления может работать для того, чтобы обрабатывать такие сигналы в соответствии с запрограммированными инструкциями, предоставленными наземному блоку 40 управления. Наземный блок 40 управления может представлять оператору требуемые параметры бурения и другую информацию через одно или более устройств 42 вывода, таких как дисплей, монитор компьютера, динамики, индикаторы и т.д., которые могут использоваться оператором для управления операциями бурения. Наземный блок 40 управления может содержать компьютер, запоминающее устройство для хранения данных, регистратор данных и другие известные и в дальнейшем разработанные периферийные устройства. Наземный блок 40 управления может также содержать модели и может обрабатывать данные в соответствии с запрограммированными инструкциями и реагировать на пользовательские команды, введенные через подходящее устройство 44 ввода, которое может быть в виде клавиатуры, сенсорного экрана, микрофона, мыши, джойстика и т.д.
В некоторых вариантах реализации данного изобретения вращающееся буровое долото 50 прикреплено на дистальном конце компоновки низа бурильной колонны (КНБК) 22, содержащей роторную управляемую систему (РУС) 58. В проиллюстрированном варианте реализации изобретения КНБК 22 соединена между буровым долотом 50 и секцией 24 бурильной трубы колонны 20 насосно-компрессорных труб. КНБК 22 и/или РУС 58 может содержать систему измерения в процессе бурения (ИПБ) с различными датчиками, например датчиками 70, 72, для предоставления информации о пласте 46 и параметров скважинного бурения. Датчики ИПБ в КНБК 22 могут включать, но не ограничиваются этим, устройство для измерения удельного сопротивления пласта вблизи бурового долота, устройство для измерения гамма-излучения для измерения естественной радиоактивности пласта 46, устройства для определения наклона и азимута колонны 20 насосно-компрессорных труб и датчики давления для измерения давления бурового раствора в забое скважины. Датчики ИПБ также могут содержать дополнительные/альтернативные чувствительные устройства для измерения импульса, вибрации, крутящего момента, телеметрии и т.д. Вышеуказанные устройства могут передавать данные в скважинный коммуникатор 33, который, в свою очередь, передает данные вверх по стволу скважины на наземный блок 40 управления. В некоторых вариантах реализации изобретения КНБК 22 также может содержать систему каротажа в процессе бурения (КПБ).
Датчик 43 может быть размещен в трубопроводе 38 для подачи бурового раствора для обнаружения импульсов бурового раствора в ответ на данные, передаваемые скважинным коммуникатором 33. Датчик 43, в свою очередь, генерирует электрические сигналы, например, в ответ на колебания давления бурового раствора, и передает такие сигналы на наземный блок 40 управления. В качестве альтернативного варианта могут использоваться другие методы телеметрии, такие как электромагнитные и/или акустические методы или любые другие подходящие методы, известные или разработанные в дальнейшем. В качестве примера, жесткопроводная бурильная труба может использоваться для связи между поверхностью и скважинными устройствами. В другом примере могут быть использованы комбинации описанных методов. Наземный передатчик/приемник 80 связывается со скважинными инструментами, используя, например, любой из описанных методов передачи, таких как метод гидроимпульсной телеметрии. Это может обеспечить двустороннюю связь между наземным блоком 40 управления и скважинным коммуникатором 33, а также другими скважинными инструментами.
КНБК 22 и/или РУС 58 могут обеспечить некоторое или все необходимое усилие, чтобы долото 50 пробивало пласт 46 (известное как «нагрузка на долото»), и обеспечить необходимое управление направлением бурения ствола 26 скважины. РУС 58 может содержать секцию управления направлением бурения с направляющими опорными подкладками 60, выдвигаемыми в боковом направлении от продольной оси АО РУС 58, чтобы давить на геологический пласт 46. Направляющие опорные подкладки 60 могут содержать навесные опорные подкладки, рычаги, ребра, стержни, лопасти стабилизатора под напряжением или любой другой элемент, выдвигаемый из РУС 58 для контакта со стенкой 56 ствола 26 скважины. Направляющие опорные подкладки 60 могут быть разнесены по окружности вокруг РУС 58 и могут по отдельности выдвигаться для контакта со стенкой 56 ствола 26 скважины, чтобы изменять угол продольной оси РУС 58 относительно ствола 26 скважины во время бурения и/или приложения бокового усилия к буровому долоту 50. Направляющие опорные подкладки 60 могут содержать комплект по меньшей мере из трех установленных снаружи направляющих опорных подкладок 60 для приложения усилия в управляемой ориентации, чтобы отклонить буровое долото 50 в требуемом направлении для управления направлением бурения. В некоторых вариантах реализации изобретения на направляющие опорные подкладки 60 подается небольшое количество буровой жидкости или бурового раствора 31, закачиваемого через бурильную колонну 20 и буровое долото 50 для удаления шлама, охлаждения и управления скважиной. Таким образом, РУС 58 использует «свободную» гидравлическую энергию буровой жидкости или бурового раствора 31 для управления наклонно-направленным бурением. Для обычных электроприводных/соленоидных систем привода потребляемая мощность составляет порядка 100-300 Вт. Направляющие опорные подкладки 60 могут обеспечивать регулируемое усилие или выдвижение для помощи в управлении направлением ствола 26 скважины. РУС 58 также содержит стабилизатор 62, соединенный с ее секцией управления.
На фиг. 2 проиллюстрирован схематический вид компоновки низа бурильной колонны 100, содержащей гибкую секцию или гибкую муфту 102, соединенную с расположенным вверх по стволу скважины концом РУС 104. Гибкая муфта 102 преимущественно может быть сконструирована так, чтобы демонстрировать меньшую жесткость на изгиб, чем РУС 104 и другие компоненты КНБК 100. Гибкая муфта 102 может содержать конструктивный соединитель 106, такой как резьбы, защелки и т.д. на своем переднем или нижнем конце, для выборочного соединения с задним или расположенным вверх по стволу скважины концом РУС 104. РУС 104 содержит секцию 110 управления, секцию 112 управления потоком и секцию 114 управления направлением бурения, каждая из которых может быть размещена в одном корпусе с большей жесткостью на изгиб, чем гибкая муфта 102. В качестве альтернативного варианта, между секцией 110 управления, секцией 112 управления потоком и секцией 114 управления направлением бурения могут быть предусмотрены конструктивные соединители 116. Гибкая муфта 102 может содержать соединитель 120 бурильной колонны на своем расположенном выше по стволу скважины конце для соединения КНБК 100 с секцией 24 бурильной трубы (фиг. 1) бурильной колонны 20. Затем компоновка низа бурильной колонны 100 может демонстрировать большую гибкость, чем одна лишь РУС 104.
В других вариантах реализации изобретения гибкая муфта 102 может быть расположена внутри РУС (см. фиг. 3) или в других местах внутри бурильной колонны 20. Когда гибкая муфта 102 расположена внутри РУС, гибкая муфта 102 может содержать конструктивный соединитель 116, резьбы, защелки и т.д. на своем переднем или расположенном ниже по стволу скважины конце для выборочного соединения с задним или расположенным выше по стволу скважины концом секции 114 управления направлением бурения РУС 104. В некоторых вариантах реализации изобретения секция 114 управления направлением бурения может содержать секцию 112 управления потоком (см. фиг. ЗА), например, секция 114 управления направлением бурения и секция 112 управления потоком могут быть размещены вместе без конструктивного соединителя между ними. Гибкая муфта 102 также может содержать конструктивный соединитель 116, резьбы, защелки и т.д. на своем заднем или расположенном выше по стволу скважины конце для выборочного соединения с передним или расположенным ниже по стволу скважины концом секции 110 управления РУС.
Гибкая муфта 102 может быть стратегически спроектирована для достижения требуемой характеристики искривления ствола скважины (desired dogleg severity - DLS) со стороны РУС 104 с заданным размещением гибкой муфты среди других компонентов гибкой муфты 102. Могут быть выбраны геометрические размеры, выбор материала и характеристики физической конструкции композитных или других неметаллических материалов для гибкой муфты 102, чтобы позволить РУС 104 удовлетворять определенным требованиям в отношении характеристик. Как правило, определение размера гибкой муфты 102 включает в себя выбор наружного диаметра (НД), внутреннего диаметра (ВД) и длины гибкой муфты. Одним из свойств материала, рассматриваемых при выборе материала, является модуль упругости (Е). Другое свойство материала, рассматриваемое при выборе материала, - это модуль жесткости (G). Стратегический размер и выбор материала для гибкой муфты 102 могут быть использованы для увеличения или максимального усиления характеристики DLS, когда это необходимо, например, для бурения участка с высоким темпом набора, темпом снижения DLS или участком поворота ствола 26 скважины (фиг. 1). Аналогичным образом, стратегический размер и выбор материала могут быть использованы для ограничения или сведения к минимуму характеристики DLS, когда это необходимо, например, для бурения участка с более низким темпом набора, темпом снижения DLS или участком поворота или для бурения вертикальных, прямолинейных, боковых или горизонтальных участков ствола 26 скважины в случаях, когда желательна более низкая характеристика DLS и/или когда высокая характеристика DLS может быть проблематичной. Стратегический размер и выбор материала гибкой муфты 102 позволяют оптимизировать другие характеристики РУС 104 и гибкой муфты 102, включающие: длину инструмента, изгибающий момент, напряжение изгиба, жесткость при кручении, напряжение сдвига из-за кручения и повышенный допуск DLS.
Буровое долото 50 соединено с расположенным ниже по стволу скважины концом секции 114 управления направлением бурения, которая содержит множество направляющих опорных подкладок 60 или других толкающих устройств для управления буровым долотом 50. Направляющие опорные подкладки 60 могут быть выполнены в виде навесных толкателей опорных подкладок, поршней управления направлением или аналогичных поршней, таких как поршни, которые установлены на регулируемых стабилизаторах контрольно-измерительных приборов (не показаны). Секция 112 управления потоком соединена над секцией 114 управления направлением бурения (или содержит расположенную выше по стволу скважины часть секции 114 управления направлением бурения) и предназначена для отвода части всей буровой жидкости или бурового раствора 31 (фиг. 1), закачиваемого через КНБК 100. Как правило, секция 112 управления потоком может содержать комплект 210 клапанов (фиг. 3), который отклоняется примерно на 1-4% от основного потока бурового раствора. Отклоненная часть проходит через фильтрующий элемент перед тем, как направиться на соответствующую направляющую опорную подкладку 60 или толкающее устройство через пути потока, определенные в секции 114 управления направлением бурения. Отклонение потока обычно достигается с помощью узлов 210 клапанов с механическим приводом/управлением, но возможны и другие устройства, например, отдельный вращающийся клапан, который распределяет отведенную часть потока на соответствующую направляющую опорную подкладку 60 или толкающее устройство через пути потока, определенные в секции 114 управления направлением бурения. Для управления узлами 210 механических клапанов и приведения их в действие, обычно используются серводвигатели, редукторы и/или подшипниковые узлы. Эти редукторы и/или подшипниковые узлы могут нуждаться в системах компенсации объема, если требуется заливка масла, и уплотняющих растворах для предотвращения попадания буровой жидкости или бурового раствора 31.
Секция управления содержит блок 212 электронного оборудования (фиг. ЗА), содержащий комплекты датчиков направления и наклона (Directional and Inclination -D&I), комплекты датчиков гамма-излучения (Gamma Ray - GR) и другие типы датчиков ИПБ или КПБ. Секция 110 управления также может содержать ЦП, устройство электропитания и устройство связи (например, скважинный коммуникатор 33 (фиг. 1)). Компоненты выработки и/или подачи питания также обычно расположены внутри секции 110 управления. Компоненты выработки и/или подачи питания должны иметь достаточные размеры для питания блока 212 электронного оборудования, приведения в действие блоков 210 механических клапанов или отдельного вращающегося клапана и преодоления любых потерь на трение, создаваемых уплотнениями, подшипниками, редукторами и т.д. или самим клапаном. Стабилизатор 62 соединен с наружным корпусом 122 секции 110 управления.
Теоретическая способность КНБК 100 осуществлять управление направлением бурения обычно определяется кривой, которая может подогнана с использованием стабилизатора 62, направляющих опорных подкладок 60 и бурового долота 50. Это те компоненты, которые обычно контактируют с геологическим пластом 46 (фиг. 1) при формировании ствола скважины 26. Изгиб секции 110 управления, секции 112 управления потоком и секций 114 управления направлением бурения может увеличить отклик управления направлением бурения КНБК 100 при работе, но изгиб этих секций 110, 112, 114 обычно ограничен, чтобы предотвратить повреждение или нарушение работы внутренних компонентов этих секций 110, 112, 114, что может привести к снижению точности управления направлением бурения (например, управления углом установки отклонителя).
На фиг. ЗА проиллюстрирован схематический вид РУС 200, содержащей гибкую муфту 102 между секцией 114 управления направлением бурения и секцией 110 управления РУС 200. Эта схема может быть особенно полезной, когда для увеличения размера используются стратегические размеры и выбор материала для гибкой муфты 102 или максимального усиления характеристики DLS РУС 200. Секция 114 управления направлением бурения размещена вместе с секцией 112 управления потоком в корпусе 206. Узлы 210 клапанов или отдельный вращающийся клапан секции 112 управления потоком расположены в части корпуса 206 преимущественно в расположенной выше по стволу скважины части направляющих опорных подкладок 60. Секция 110 управления содержит модульный узел 212 датчика и управляющего электронного оборудования.
В компоновке на фиг. 3 узлы 210 клапанов, отдельный вращающийся клапан или другие устройства управления потоком в секции 112 управления потоком могут требовать электрического соединения с модульным узлом 212 датчика и управляющего электронного оборудования. Когда узлы 210 клапанов содержат аккумулятор или другой источник питания (не показаны), содержащиеся в корпусе 206 секции 114 управления направлением бурения, узлам 210 клапанов могут потребоваться только инструкции для передачи через гибкую муфту 102. Инструкции может получать блок 218 приема сообщений секции 114 управления направлением бурения. Когда узлы 210 клапанов не содержат источник питания, узлы 210 клапанов могут нуждаться в получении инструкций, а также питания через гибкую муфту 102. Инструкции и данные могут передаваться через многожильный коммуникационный кабель 222, провод или другой электрический проводник, проходящий через гибкую муфту 102. Блок 224 передачи связи может быть функционально соединен с модульным узлом 212 электронного оборудования для получения от него инструкций и может быть функционально соединен с коммуникационным кабелем 222 для передачи инструкций через него. Поскольку только электрический коммуникационный кабель 222 должен проходить через нее (например, может не потребоваться механический приводной вал), гибкая муфта 102 с уменьшенной жесткостью на изгиб может быть добавлена в непосредственной близости к буровому долоту 50, то есть непосредственно над направляющими опорными подкладками 60.
Передний стабилизатор 230 может быть предусмотрен в секции 114 управления направлением бурения и проходит в поперечном направлении от корпуса 206. Передний стабилизатор 230 может предотвращать воздействие части изгибающих моментов, приложенных к бурильной колонне 20 (фиг. 1), проходящей через изогнутый ствол скважины, на направляющие опорные подкладки 60. Было обнаружено, что в некоторых случаях эти изгибающие моменты заставляют направляющие опорные подкладки 60 втягиваться в корпус 206, тем самым предотвращая эффективное управление направлением бурового долота 50. Передний стабилизатор 230 может быть расположен рядом с или над направляющими опорными подкладками 60 и может выступать из того же корпуса 206, что и направляющие опорные подкладки 60.
Секция 232 питания предусмотрена над секцией 110 управления. Секция 232 питания может содержать лопатки турбины (не показаны), которые извлекают энергию из бурового раствора 31 (фиг. 1), закачиваемого в бурильную колонну (фиг. 1), для выработки электроэнергии для узла 212 электронного оборудования, блока 224 передачи связи, блока 218 приема связи и узлов 210 клапанов. Узлы 210 клапанов или отдельный вращающийся клапан могут опираться на электродвигатель (не показан) для выборочной подачи бурового раствора на направляющие опорные подкладки 60.
В случае, когда изгибание не требуется, гибкая муфта 102 может стать возможным в будущем обновленным вариантом. В некоторых вариантах реализации изобретения гибкая муфта 102 также может использоваться для установки датчиков для измерения и записи параметров бурения, таких как нагрузка на долото (weight on bit - WOB), крутящий момент на долоте (torque on bit - ТОВ) и изгибающие нагрузки; важных данных, которые можно использовать для управления направлением бурения. Чтобы повысить управляемость и отклик РУС 200, выбранные датчики направления и наклона могут быть размещены ниже гибкой муфты 102, например, в секции 114 управления направлением бурения, чтобы обеспечить раннюю индикацию результатов направленного бурения. Гибкая муфта 102 может быть спроектирована, сконструирована и размещена в РУС 200, чтобы сделать РУС 200 весьма гибкой и обеспечить высокую характеристику DLS. Данные в направлении вблизи долота и/или данные измерения наклона могут предоставляться комплектом 240 приборов динамических измерений в секции 114 управления направлением бурения или гибкой муфте 102 (см. фиг. 4) для измерения направления и/или наклона бурового долота 50 и/или других характеристик операции бурения. Комплект 242 датчиков уровня разведки может быть предусмотрен в секции 110 управления для обеспечения характеристик ИПБ и/или КПБ. Измерения вблизи долота могут быть более низкого качества и будут объединяться с данными направления и наклона (D&I) более высокого качества из секции управления для принятия решений по управлению направлением бурения.
Как указано выше, секция 110 управления имеет модульный узел 212 электронного оборудования, содержащий комплекты датчиков для D&I, GR и других данных, а также ЦП, устройства стабилизации питания и связи. Секция модуля выработки/подачи питания также обычно расположена внутри секции 110 управления. Чтобы обеспечить простую диагностику и техническое обслуживание, очень желательна высокая степень модульности в сочетании со встроенными средствами диагностики и памяти на каждом модуле, что позволяет обнаруживать неисправности и отслеживать срок службы, а также регистрацию накопительной истории эксплуатации.
Секция 114 управления направлением бурения может содержать комплект по меньшей мере из трех установленных снаружи узлов исполнительных механизмов или направляющих опорных подкладок 60, которые прикладывают усилие к стволу 26 скважины (фиг. 1) в управляемой ориентации, чтобы отклонять буровое долото 50 в требуемом направлении для управления направлением бурения. На направляющие опорные подкладки 60 может подаваться небольшой процент буровой жидкости или бурового раствора 31 (фиг. 1), закачиваемого через бурильную колонну 20 (фиг. 1) и буровое долото 50 для удаления шлама, охлаждения скважины и управления скважиной. Таким образом, РУС 200 использует «свободную» гидравлическую энергию бурового раствора для управления направлением бурения. Узлы исполнительного механизма или направляющие опорные подкладки 60 могут быть поршневыми узлами, подвешенными опорными подкладками или лопастями стабилизатора под напряжением в различных вариантах реализации изобретения. Используя «свободную» гидравлическую энергию бурового раствора, закачиваемого через бурильную колонну 20, требуется только энергия для управления потоком жидкости. В случае обычных электроприводных/соленоидных систем привода потребляемая мощность составляет порядка 100-300 Вт. Электромеханические приводы на основе материалов предусматривают значительно сниженную потребляемую мощность, низкое тепловыделение, конструкцию без движущихся частей, для которых требуется герметичное уплотнение и заправка маслом, и соответствующие системы компенсации, низкие скорости износа, высокую жесткость, пропорциональный отклик и очень компактную конструкцию. По сравнению с требованиями к мощности обычных систем электропривода (100-300 Вт) требования к мощности устройства 210 управления потоком на основе электромеханического материала могут составлять всего 10 Вт или меньше. Низкое энергопотребление в сочетании с компактной конструкцией должно позволять устанавливать устройства 210 управления потоком снаружи секции 114 управления направлением бурения в непосредственной близости от направляющих опорных подкладок 60. Это уменьшает необходимость дорогостоящей операции бурения с использованием перфораторов для создания путей потока в РУС 200 для подачи буровой жидкости или бурового раствора на направляющие опорные подкладки 60. В качестве альтернативного варианта, отдельный вращающийся клапан может распределять поток на направляющие опорные подкладки 60 через коллектор и отверстия, пробуренные перфоратором.
В другом варианте реализации изобретения устройства 210 управления потоком расположены внутри направляющих опорных подкладок, например, внутри поршневого узла, предназначенного для приведения в действие направляющих опорных подкладок 60. Компактная конструкция обеспечивает ключевое преимущество в том, что она позволяет использовать управляющую электронику и датчики 240 для управления направлением бурения для перемещения гораздо ближе к буровому долоту 50, что позволяет лучше контролировать направление бурения. В других вариантах реализации изобретения РУС 200 может быть оснащена компактным и автономным модулем для обычной секции 112 управления потоком, который находится внутри или прикреплен к секции 114 управления направлением бурения.
На фиг. ЗВ проиллюстрирован вид в поперечном сечении гибкой муфты 102. Гибкая муфта 102 обычно определяет первый наружный диаметр НД1 на своем переднем конце 240 и заднем конце 242. Первый наружный диаметр НД1 может быть аналогичен наружным диаметрам корпусов 122 (фиг. 2) и 206 (фиг. 3А) секции 110 управления и секции 114 управления направлением бурения. Суженная часть 246 между передним и задним концами 240, 242 определяет второй наружный диаметр НД2, который меньше, чем первый наружный диаметр НД1. Суженная нижняя часть 246 обеспечивает уменьшенную жесткость на изгиб гибкой муфты 102. В других вариантах реализации изобретения гибкая муфта 102 может быть выполнена в формах, отличных от обычной, суженной муфты. Например, гибкая муфта 102 может быть преимущественно цилиндрическим трубчатым элементом, например, первый и второй наружные диаметры НД1, НД2 (и третий наружный диаметр НДЗ) могут быть одинаковыми. На НДЗ может быть предусмотрена износостойкая лента или стабилизатор (280) для предотвращения чрезмерного износа в случае контакта со стволом 26 скважины или для ограничения бокового отклонения заднего конца 242 гибкой муфты 102 внутри ствола 26 скважины. В других вариантах реализации изобретения гибкая муфта может быть выполнена в виде полностью шарнирного универсального шарнира. В случае полностью шарнирного универсального шарнира шарнир может быть определен на наружной стороне корпуса так, что весь наружный диаметр гибкой муфты под шарниром сочленяется. Чем ниже жесткость при изгибе гибкой муфты 102 или гибкой секции, тем больше РУС 200 (фиг. ЗА) ведет себя как роторная управляемая система с направлением долота с потенциалом достижения очень высоких степеней интенсивности искривления.
Передача данных и питания через гибкую муфту 102 может быть достигнута различными способами, например через проводной удлинитель, проходящий через гибкую муфту 102, электрические проводники, присоединенные к гибкой муфте 102 или интегрированные с ней, или же посредством беспроводной передачи питания/данных на короткие расстояния. Как проиллюстрировано на фиг. 3В, гибкая муфта 102 содержит электрические соединители 250, 252 на переднем и заднем концах 240, 242 для облегчения соединения гибкой муфты 102 с другими секциями 110, 112, 114, 232 РУС 200. Соединители 250, 252 могут содержать вращающиеся соединители, например соединители, которые могут входить в зацепление с соответствующими соединителями в других секциях 110, 112, 114, 232 РУС посредством относительного вращательного движения между ними. В некоторых вариантах реализации изобретения конструктивные соединители 254, 256, такие как резьбы, могут быть предусмотрены для соединения гибкой муфты 102 с другими секциями 110, 112, 114, 232, так что относительное вращательное движение устанавливает как конструкционные, так и электрические соединения между гибкой муфтой 102 и другими секциями 110, 112, 114, 232. В некоторых вариантах реализации изобретения соединители 250, 252 могут содержать 8-контактные вращающиеся соединители для размещения передачи данных и питания через гибкую муфту 102. В зависимости от требований к питанию секции управления потоком может быть включен небольшой аккумулятор или компактный модуль выработки питания, например, на основе вибрации. В этом случае потребуется только передача данных, что облегчает беспроводную гибкую муфту 102.
Соединители 250, 252 могут быть функционально связаны друг с другом с помощью электрического кабеля 222 (фиг. 3А). В некоторых вариантах реализации изобретения продольное отверстие 260, пробуренное с помощью перфоратора, может быть выполнено через стенку 262 гибкой муфты 102. Продольное отверстие 260 может быть радиально смещено от основного проходного канала 264, проходящего через гибкую муфту 102.
Гибкая муфта 102 может быть выполнена сменной и/или перемещаемой среди секций 110, 112, 114, 232 РУС 200, чтобы конфигурировать РУС 200 на основании требуемого отклика управления направлением бурения. Может быть выполнено детальное моделирование, чтобы определить, необходима ли конкретная гибкая муфта 102 или гибкая секция для достижения требуемой интенсивности искривления для конкретного проекта. Например, требуемая интенсивность искривления может учитываться при выборе гибкой муфты из источника доступных гибких муфт 102, или гибкая муфта 102 может быть сконструирована в соответствии с размерами и выбором материала на основе требуемой интенсивности искривления для данного проекта. В некоторых вариантах реализации изобретения буровое долото 50 (фиг. 3А) также может быть выбрано и/или сконструировано для обеспечения необходимой эффективности бокового резания для размещения или дополнения конкретной конфигурации и расположения гибкой муфты 102 в РУС 200. Эффективность бокового резания бурового долота относится к способности бурового долота выполнять бурение в поперечном направлении как отношение способности бурового долота выполнять бурение в осевом направлении. Эффективность бокового резания (Side-cutting efficiency - SCE) может быть определена следующим образом:

Типичный диапазон SCE для бурового долота типа PDC составляет от 0,01 до 0,50. В некоторых примерах, если определено, что РУС 200, имеющая конкретную компоновку, способна обеспечить более высокую характеристику DLS, чем необходимо, можно выбрать буровое долото 50, имеющее относительно низкую эффективность бокового резания, чтобы ограничить характеристику DLS для улучшения долговечности или надежности РУС 200. Например, буровое долото 50, имеющее относительно низкую эффективность бокового резания, может быть выбрано для обеспечения того, чтобы гибкая муфта 102 изгибалась только до заданного процента своей характеристики вдоль заданного пути ствола 26 скважины (фиг. 1). В качестве альтернативного варианта, если определено, что РУС 200, имеющая конкретную компоновку, не может обеспечить требуемую характеристику DLS, буровое долото 50, имеющее относительно высокую эффективность бокового резания, может быть выбрано для выполнения задач бурения.
На фиг. 4 проиллюстрирован схематический вид РУС 300, имеющей гибкую муфту 302, в которой компоненты 304 управления расположены внутри гибкой муфты 302.
Компоненты 304 управления могут содержать любое из оборудования, описанного выше для узла 212 электронного оборудования (фиг. 3А), и любые другие модульные узлы управления для работы РУС 300. Благодаря применению некоторых из методов выбора материала и стратегического определения размеров, описанных ниже, внутренний диаметр 111 гибкой муфты 302 может быть достаточно увеличен для некоторых вариантов применения, чтобы приспособить модульные узлы 304 управления, а также обеспечить достаточный поток жидкости через него. Эта компоновка может уменьшить общую длину ОД 300 РУС для некоторых вариантов применения. Как проиллюстрировано на фиг. 4, гибкая муфта 302 схематически показана как содержащая сужающуюся секцию, но, как описано выше, в общем также предусмотрены цилиндрические или другие конфигурации.
В некоторых вариантах реализации изобретения, раскрытых в данном документе, описывается концепция роторного управляемого устройства с отклонением долота с гибкой муфтой 102, 302 между секцией 114 управления направлением бурения и секцией 110 управления РУС для улучшения характеристики радиуса поворота. Стратегический размер и выбор материала гибкой муфты 102, 302 могут дополнительно улучшить характеристику радиуса поворота или при необходимости ограничить эту характеристику. По мере того как гибкая муфта 102, 302 становится более гибкой, увеличивается характеристика РУС в отношении интенсивности искривления (DLS). Высокая характеристика DLS является желательной для многих нефтяных и/или газовых скважин 26 (фиг. 1). Например, короткая длина кривой на участке набора кривизны может максимально увеличить степень воздействия на пласт в последующем боковом участке добычи. Другие варианты применения могут требовать высокой характеристики DLS, например: обход других стволов скважин; достижения требуемой характеристики DLS в проблематичном пласте путем выбора конфигурации, которая обычно обеспечивает более высокую, чем необходимая, характеристику DLS, для компенсации неуплотненной породы, низкой прочности породы, перепад ствола скважины, тренды пласта, трещины гидроразрыва пласта или другие проблемы пласта; обход или выход из проблемных или нежелательных геологических формаций; или бурение участков бокового ствола из существующего ствола 26 скважины.
Многие нефтяные и/или газовые скважины не требуют высокой характеристики DLS. В этих случаях гибкая муфта 102, 302 может быть сделана более жесткой (и, следовательно, более устойчивой), и характеристика DLS РУС может быть уменьшена. Может быть желательно ввести более жесткую РУС с более низкой характеристикой DLS, чтобы избежать создания или уменьшить создание уступов или коротких сегментов локально высокой DLS, которые иногда создаются с помощью инструментов с высокой DLS, при попытке пробурить сегмент с низкой DLS, например, прямо в вертикальных, тангенциальных, боковых или горизонтальных участках ствола скважины. Кроме того, системы с высокой характеристикой DLS менее стабильны и могут создавать колебания или закручивание ствола скважины, чего можно избежать, используя относительно жесткую гибкую муфту 102, 302.
Стратегический выбор эффективности бокового резания бурового долота 50 может использоваться в сочетании с выбором размеров и материала гибкой муфты 102, 302 для достижения требуемых результатов. В некоторых случаях буровое долото 50 с относительно высокой эффективностью бокового резания может быть выбрано для использования с конкретной гибкой муфтой 102, 302. Например, когда требуется максимальная характеристика DLS, гибкая муфта 102, 302 с максимальной гибкостью может сочетаться с буровым долотом 50, имеющим максимальное значение SCE, с учетом других ограничений, таких как напряжение, скорость проходки и т.д. В некоторых случаях буровое долото 50 с относительно низкой эффективностью бокового резания может быть выбрано для использования с конкретной компоновкой гибкой муфты 102, 302 для ограничения характеристики DLS РУС 58, 200, 300. Например, может быть выбрано буровое долото 50, имеющее относительно низкую эффективность бокового резания, для предотвращения изгиба гибкой муфты 102, 302 до ее функциональной возможности в операции. Это может увеличить стабильность РУС 58, 200, 300 и ограничить многие нежелательные свойства стволов скважин. Выступы, локальные высокие DLS, а также колебания или закручивание ствола скважины создают сопротивление, ограничивающее длину тангенциальных, боковых или горизонтальных участков ствола скважины. Эти нежелательные свойства могут также затруднять спуск потайных обсадных колонн, обсадных колонн и оборудования для заканчивания скважин в ствол скважины или их извлечение из ствола скважины. В некоторых случаях может быть выбрано буровое долото 50 с относительно высокой эффективностью бокового резания для повышения характеристики DLS относительно жесткой гибкой муфты 102, 302. Относительно жесткая гибкая муфта 102, 302 может быть желательной для ограничения вибрации или крутильных колебаний и все же возможного достижения требуемого целевого значения DLS с помощью бурового долота 50 с более высокой характеристикой SCE. Полный диапазон жесткости гибкой муфты 102, 302 вместе с полным диапазоном SCE бурового долота 50 можно рассматривать вместе при стратегическом выборе НД, ВД, длины и материала гибкой муфты 102, 302 и SCE бурового долота 50 для достижения требуемой DLS и других задач, связанных со стволом скважины.
По меньшей мере по причинам, изложенным выше, желательно стратегически выбирать конфигурацию 58, 200, 300 РУС и SCE бурового долота 50, чтобы соответствовать потребностям бурения ствола 26 скважины. Благодаря выбору подходящей комбинации наружного диаметра, ВД, длины, материала гибкой муфты, положения гибкой муфты 102, 302 в КНБК 22 и/или эффективности бокового резания бурового долота 50 для использования с КНБК 22, могут быть удовлетворены потребности в связи со стволом 26 скважины. Выбор этих параметров может также обеспечить другие преимущества, включая обеспечение более желательной длины, жесткости при изгибе, напряжения изгиба, крутильной жесткости, напряжения сдвига из-за кручения и увеличенного допуска DLS, как обсуждается ниже.
Со ссылкой на фиг. 5А описана приведенная в качестве примера гибкая муфта 402, имеющая преимущественно цилиндрическую конфигурацию. Гибкая муфта имеет длину (Д), внутренний диаметр (ВД) и наружный диаметр (НД). Хотя гибкая муфта 402 имеет упрощенную геометрическую конфигурацию, принципы, обсуждаемые ниже со ссылкой на гибкую муфту 402, также учитывают более сложные геометрические конфигурации гибких муфт 102, 302, описанных выше. В более широком смысле, увеличение гибкости гибкой муфты 402 может быть достигнуто одним или более из следующих действий: (1) уменьшение наружного диаметра (НД), (2) увеличение внутреннего диаметра (ВД), (3) увеличение длины (Д) и (4) уменьшение модуля упругости (Е) гибкой муфты 402. И наоборот, увеличение жесткости гибкой муфты 402 может быть достигнуто одним или более из следующих действий: (1) увеличение наружного диаметра НД, (2) уменьшение внутреннего диаметра ВД, (3) уменьшение длины (Д) и (4) увеличение модуля упругости (Е) гибкой муфты 402.
Создание требуемого наружного диаметра (НД), внутреннего диаметра (ВД) и длины (Д) может быть достигнуто с помощью обычно применяемых технологий механической обработки, литья или ковки, когда выбирается металлический материал. Неметаллические материалы, такие как композиты, стекловолокно, пластмассы и т.д., также могут быть применены с комбинацией требуемого наружного диаметра (НД), внутреннего диаметра (ВД), длины (Д) и модуля упругости (Е). Модуль упругости (Е) является физико-механическим свойством материала и, таким образом, может быть выбран путем выбора материала. В случае композитов или некоторых других неметаллических материалов физическая структура самого материала может изменяться для обеспечения требуемого модуля упругости (Е).
Неограничивающие примеры обычных металлических материалов, используемых в скважинных приборах с репрезентативными значениями модуля упругости, включают в себя: сталь или нержавеющую сталь (28-30×106 фунтов на квадратный дюйм); бериллиевую медь (19,5×106 фунтов на квадратный дюйм); титан (13,9-19×106 фунтов на квадратный дюйм); а также алюминий (10×106 фунтов на квадратный дюйм), аустенитные сплавы на основе никеля и хрома, такие как Inconel 718 (29,6×106 фунтов на квадратный дюйм). В некоторых случаях могут быть выбраны магниевые материалы.
На фиг. 5 В представлена таблица, иллюстрирующая геометрические характеристики и характеристики жесткости двух приведенных в качестве примера гибких муфт 402титан, 402сталь, изготовленных из разных материалов (стали и титана), показывающие, как конкретная характеристика DLS РУС 58 (фиг. 1) может быть обеспечена путем соответствующего выбора доступных конструктивных параметров. В примере, проиллюстрированном на фиг. 5В, гибкие муфты 402ТИТан, 402сталь из титана и стали имеют одинаковую длину (Д). Титановая гибкая муфта 402титан, тем не менее, обладает гораздо большими (НД) и (ВД), чем стальная гибкая муфта 402сталь, и, следовательно, обеспечивает гораздо больший момент площади инерции (I). Если бы два материала имели одинаковый модуль упругости (Е), момент площади инерции (I) указывает на то, что гибкая титановая муфта 402титан была бы на 43% более жесткой, чем стальная гибкая муфта 402. Однако модуль упругости (Е) титановой муфты 402титан составляет всего 48% от стальной гибкой муфты 402сталь. Поскольку длина (Д) гибких муфт 402ТИТан, 402сталь одинакова, чистая жесткость может быть представлена как Е×I. Суммарный эффект состоит в том, что гибкая титановая муфта 402титан всего на 69% жестче, чем стальная гибкая муфта 402сталь. Стальная гибкая муфта 402сталь намного жестче, чем титановая гибкая муфта 402титан, даже несмотря на то, что наружный диаметр (НД) и внутренний диаметр (ВД) намного меньше.
На фиг. 6 и 7 проиллюстрировано воздействие этих двух гибких муфт 402титан, 402сталь и неодинаковая связанная жесткость на характеристику DLS РУС 58. На фиг. 6 показана скорость набора кривизны или интенсивность искривления (DLS) для двух гибких муфт различной жесткости в зависимости от нагрузки на долото (WOB) при различных наклонах (0 градусов, 30 градусов, 60 градусов и 90 градусов). На фиг. 7 скорость падения кривизны показана как функция WOB. Скорость набора кривизны обычно относится к DLS в вертикальной плоскости, поскольку наклон увеличивается с глубиной, а скорость падения кривизны обычно относится к DLS в вертикальной плоскости, поскольку наклон уменьшается с глубиной.
В примере, проиллюстрированном на фиг. 6, титановая гибкая муфта 402ТИТан обеспечивает скорость набора кривизны, больше приблизительно на 5-11 градусов на 100 футов, чем стальная гибкая муфта 402сталь, в диапазоне WOB, и наклоне, потому что она более гибкая (она на 69% более жесткая, чем стальная гибкая муфта 402сталь). Как проиллюстрировано на фиг. 7, для этого конкретного примера титановая гибкая муфта 402титан имеет скорость падения кривизны больше на 7-18 градусов на 100 футов по сравнению со стальной гибкой муфтой 402сталь в диапазоне WOB и наклоне, потому что она более гибкая и обладает всего 69% жесткости.
Из примеров, проиллюстрированных на фиг. 5А-7, можно продемонстрировать, что выбор материала для гибкой муфты с более низким модулем упругости (Е), чем у стального варианта, может обеспечить большую гибкость для достижения более высоких характеристик DLS. Материалы с более низким модулем упругости (Е), чем стальной вариант, включают, но не ограничиваются ими, титан, бериллиевую медь и алюминий. Дополнительные улучшения по сравнению со стальной гибкой муфтой также могут быть реализованы при выборе титанового материала, как проиллюстрировано на фиг. 5-7.
Например, может быть реализована уменьшенная общая длина «ОД» (см. фиг. 4) инструмента, или относительно короткая РУС 58 может быть снабжена титановой гибкой муфтой 402титан или гибкой муфтой, изготовленной из разнородных материалов относительно секции управления направлением бурения РУС 58. Титановая гибкая муфта 402титан в примере на фиг. 5-7 обеспечивает больший внутренний диаметр (ВД), чем стальная гибкая муфта 402сталь. При меньшем внутреннем диаметре (ВД) стальной гибкой муфты 402сталь может быть нецелесообразно запускать электронные компоненты/модули управления, например, компоненты управления 304 (см. фиг. 4) в гибкой муфте 402сталь, из-за размера, необходимого для модулей, пространства, необходимое для опор/центраторов между модулями и внутреннего диаметра (ВД) муфты 402сталь, и площади потока, необходимой между модулями, а также внутреннего диаметра (ВД) муфты 402сталь (и, в частности, площади потока через опоры/центраторы). Таким образом, со стальной гибкой муфтой 402сталь провода или кабели 222 могут проходить по длине гибкой муфты, чтобы электрически соединять секцию модуля управления и секцию управления направлением бурения (см., например, фиг. 3А, не в масштабе). При большем внутреннем диаметре (ВД), который обеспечивает гибкая титановая муфта 402титан, может оказаться целесообразным спускать компоненты 304 электронного оборудования/средств управления внутри гибкой муфты 402титан (см., например, фиг. 4, не в масштабе). Длина, которая перекрывается проводами или кабелями 222, может использоваться управляющими компонентами 304 или любым другим модулем электронного оборудования. Общая длина «ОД» РУС 300 может быть значительно уменьшена.
При выборе титана для изготовления гибкой муфты 402титан также может быть реализована пониженная жесткость при изгибе и напряжение при изгибе. Изгибающий момент пропорционален (Е×1)/радиусу кривизны, например, чем меньше радиус кривизны, тем больше изгибающий момент.Радиус кривизны обратно пропорционален DLS, например, чем больше DLS, тем меньше радиус кривизны. Следовательно, изгибающий момент пропорционален (Е×I)×DLS. Для заданной DLS снижение (Е×I) обеспечивается титановой гибкой муфтой 402титан, следовательно, уменьшается изгибающий момент.
Напряжение изгиба пропорционально изгибающему моменту×(НД/2) / I. Таким образом, напряжение изгиба пропорционально (Е×I)×DLS×(НД/2) / I. Поскольку «I» появляется как в числителе, так и в знаменателе, оно делится и, следовательно, напряжение изгиба пропорционально Е×DLS×(НД/2). В этом примере титановая гибкая муфта 402титан снижает модуль упругости (Е), но увеличивает наружный диаметр (НД). Пока уменьшение модуля упругости (Е) пропорционально больше, чем увеличение наружного диаметра (НД), изгибающее напряжение уменьшается, что обеспечивается титановой гибкой муфтой 402титан. Низкое напряжение изгиба очень желательно в вариантах применения РУС.
При выборе титановой гибкой муфты 402титан также может быть реализована пониженная жесткость на кручение и уменьшенное напряжение сдвига из-за кручения. Жесткость при кручении пропорциональна (J×G) / длину гибкой муфты 402титан, где J представляет полярный момент инерции, a G представляет модуль жесткости. Для заданной длины (Д) в этом конкретном примере титановая гибкая муфта 402титан снижает жесткость на кручение (например, J×G ниже для титановой гибкой муфты 402титан), что не обязательно желательно во всех случаях. Некоторая оптимизация может происходить с длиной (Д) путем уменьшения длины (Д) гибкой титановой муфты 402титан, чтобы увеличить жесткость при кручении, сбалансированную с увеличением жесткости на изгиб и напряжения при изгибе.
Однако напряжение сдвига из-за кручения пропорционально крутящему моменту×(НД/2) / J. Титановая гибкая муфта 402ТИТан допускает большее значение J, следовательно, более низкое напряжение сдвига из-за кручения, даже когда увеличивается НД, потому что J является функцией НД4. Снижение напряжения сдвига из-за кручения очень желательно в вариантах применения РУС.
Увеличенный допуск DLS также может быть реализован путем выбора титановой гибкой муфты 402титан. Как показано в примере на фиг. 5-7, уменьшение жесткости с использованием титановой гибкой муфты 402титан увеличивает характеристику DLS. Но из-за более низкого напряжения изгиба при заданной DLS титановая гибкая муфта 402титан дает возможность допускать более высокую DLS.
Со ссылкой на фиг. 8 описан способ 500 конфигурации и построения роторной управляемой системы. Хотя этапы, описанные ниже, могут выполняться в порядке, показанном на фиг. 8, по меньшей мере некоторые из этапов могут выполняться в другом порядке без отхода от объема данного изобретения. На этапе 502 определяется максимальная DLS, необходимая для бурения ствола скважины. Требуемая или максимальная DLS может включать, например, наибольшую скорость набора крутизны или скорость падения крутизны по заданному пути ствола скважины или траектории ствола скважины.
На этапе 504 выбор комбинации параметров для гибкой муфты выполняется на основании требуемой DLS. Например, комбинация параметров может быть выбрана так, чтобы обеспечить роторную управляемую систему достаточной гибкостью для достижения максимальной скорости набора крутизны. Параметры включают геометрические параметры, например, наружный диаметр (НД), внутренний диаметр (ВД), длину (Д) гибкой муфты. Параметры могут также включать параметры материала, например модуль упругости (Е). Материал выбирают для гибкой муфты, основываясь по меньшей мере частично на выбранном модуле упругости (Е) (этап 506). В некоторых вариантах реализации изобретения материал, выбранный для гибкой муфты, может отличаться от материала других секций РУС. Например, корпуса для секции 110 управления, секции 112 управления потоком и секции 114 управления направлением бурения могут быть выполнены из стали, в то время как для гибкой муфты можно выбрать титан или Inconel 718.
На этапе 508 выбирают размещение гибкой муфты внутри роторной управляемой системы. В тех случаях, когда требуемая DLS является относительно высокой, можно предусмотреть размещение гибкой муфты между секцией управления направлением бурения и секцией управления. В тех случаях, когда требуемая DLS является относительно низкой или когда стабильность представляет значительную проблему, можно предусмотреть размещение гибкой муфты на расположенном вверх по стволу скважины конце секции 110 управления. Затем может быть выбрано долото для использования с РУС (этап 510). При выборе можно учитывать эффективность бокового резания бурового долота. В тех случаях, когда требуемая DLS является относительно высокой, может быть выбрана относительно высокая эффективность бокового резания, которая может позволить гибкой муфте достигать своей способности к изгибу в процессе работы. Когда требуемая DLS является относительно низкой, может быть выбрано буровое долото, имеющее относительно низкую эффективность бокового резания, что может ограничивать изгиб гибкой муфты в процессе работы. Характеристика DLS с относительно жесткой гибкой муфтой может быть улучшена с помощью бурового долота с относительно высоким значением SCE. Характеристика DLS с относительно гибкой муфтой может быть ограничена долотом с относительно низким значением SCE.
После того как выбраны все параметры и компоновка РУС, на этапе 512 может быть определена начальная способность искривления РУС на основании выбранного размещения, материала и комбинации параметров для гибкой муфты. В некоторых вариантах реализации изобретения начальная характеристика DLS определяется математически, например, с помощью моделей и методов анализа методом конечных элементов. В других вариантах реализации изобретения характеристика DLS определяется эмпирически путем построения РУС в соответствии с выбранными параметрами и наблюдения за характеристикой, достигнутой в испытательном или фактическом рабочем стволе скважины.
Затем выполнение способа 500 переходит к решению 514, в котором начальная характеристика DLS сопоставляется с предварительно определенным допуском для характеристики DLS. Если определено, что начальная характеристика DLS достаточно близка к требуемой интенсивности искривления DLS, выполнение способа 500 может перейти к этапу 516, на котором РУС и/или буровое долото конструируются на основании начального выбранного размещения и параметров гибкой муфты, и/или SCE бурового долота, с последующим развертыванием РУС в стволе скважины (этап 518) с выбранным буровым долотом.
Если в решении 514 определено, что начальная характеристика DLS не находится в пределах предварительно определенного допуска, выполнение способа 500 может вернуться к этапу 504 (или любому из этапов 506, 508, 510), на котором могут быть сделан скорректированный выбор. Может быть выполнено скорректированное размещение, материал и комбинация параметров, которые дают возможность добиться скорректированной способности искривления, которая является более приближенной к требуемой интенсивности искривления, чем начальная характеристика способности искривления. В некоторых вариантах реализации изобретения, в которых характеристика DLS, определенная на этапе 512, является недостаточной, может быть выбран скорректированный модуль упругости (Е), который меньше, чем начальный модуль упругости (Е), выбранный для получения более гибкой РУС.И наоборот, если характеристика DLS, определенная на этапе 512, больше, чем необходимо для учета требуемой интенсивности искривления DLS, может быть выбрано буровое долото, имеющее более низкую эффективность бокового резания, для повышения стабильности и/или долговечности РУС. Выполнение способа 500 может повторяться итеративно до тех пор, пока определенная характеристика DLS не окажется в пределах допуска.
После этого РУС и/или буровое долото могут быть сконструированы на основании скорректированного размещения, материала и комбинации параметров (этап 516), и РУС может быть развернута в стволе скважины для достижения интенсивности искривления, требуемой для скорректированного бурового долота.
Аспекты изобретения, описанные ниже, предоставлены для описания выбора концепций в упрощенном виде, которые описаны более подробно выше. Данный раздел не предназначен для определения ключевых признаков или существенных признаков заявленного объекта изобретения и не предназначен для использования в качестве помощи в определении объема заявленного объекта изобретения.
В одном аспекте изобретение относится к способу конфигурации роторной управляемой системы. Способ включает в себя: (а) определение максимальной интенсивности искривления, необходимой для бурения ствола скважины по запланированной траектории ствола скважины, (b) определение комбинации параметров для гибкой муфты, чтобы обеспечить роторную управляемую систему достаточной гибкостью для достижения максимальной интенсивности искривления, причем параметры включают в себя наружный диаметр, внутренний диаметр, длину и модуль упругости, (с) выбор материала для гибкой муфты на основании определенного модуля упругости и (d) сборку роторной управляемой системы с гибкой муфтой с учетом комбинации параметров и выбранного материала.
В некоторых вариантах реализации изобретения способ дополнительно включает в себя выбор бурового долота, обладающего эффективностью бокового резания, определенной для того, чтобы заставить гибкую муфту изгибаться на заданный процент способности к изгибу или способности гибкой муфты при максимальной интенсивности искривления вдоль заданной траектории ствола скважины, а также сборку роторной управляемой системы с буровым долотом. Выбранная эффективность бокового резания может быть определена для ограничения характеристики DLS роторной управляемой системы.
В одном или более приведенных в качестве примера вариантах реализации изобретения способ может дополнительно включать в себя выбор размещения гибкой муфты относительно секции управления направлением бурения и секции управления роторной управляемой системы. В некоторых вариантах реализации изобретения размещение гибкой муфты выбирается так, чтобы она находилось между секцией управления направлением бурения и секцией управления роторной управляемой системы. Материал, выбранный для гибкой муфты, может отличаться от материалов секции управления направлением бурения и секции управления. В некоторых вариантах реализации изобретения выбранный материал содержит по меньшей мере одно из группы, состоящей из: титана, аустенитных сплавов на основе никеля и хрома и беррилиевой меди.
В некоторых приведенных в качестве примера вариантах реализации изобретения комбинация параметров определяется для обеспечения требуемой длины инструмента для РУС.Комбинация параметров также может быть определена для обеспечения изгибной жесткости или напряжения изгиба, требуемого для гибкой муфты, крутильной жесткости или напряжения сдвига из-за кручения, требуемого для гибкой муфты, или достижимого допуска DLS.
В другом аспекте изобретение относится к способу конфигурации и развертывания роторной управляемой системы. Способ включает в себя: (а) определение максимальной интенсивности искривления, необходимой для бурения ствола скважины по запланированной траектории ствола скважины, (b) выбор комбинации параметров для гибкой муфты, причем параметры включают наружный диаметр, внутренний диаметр, длину и модуль упругости, (с) выбор материала для гибкой муфты на основании выбранного модуля упругости, (d) выбор размещения гибкой муфты в роторной управляемой системе (е) определение начальной способности искривления роторной управляемой системы, имеющая выбранное размещение, материал и комбинацию параметров для гибкой муфты, (f) выбор скорректированного размещения, материала и комбинации параметров, определенных для получения скорректированной способности искривления, которая более приближена к максимальной требуемой интенсивности искривления, чем начальная способность искривления, (g) построение роторной управляемой системы на основании скорректированного размещения, материала и комбинации параметров и (h) развертывание роторной управляемой системы в стволе скважины для достижения максимальной интенсивности искривления, требуемой на заданной траектории ствола скважины.
В одном или более приведенных в качестве примера вариантах реализации изобретения способ дополнительно включает в себя выбор бурового долота, обладающего эффективностью бокового резания, определяемой для того, чтобы заставить гибкую муфту изгибаться на заданный процент от скорректированной способности искривления при максимальной интенсивности искривления, требуемой вдоль заданной траектории ствола скважины. В некоторых вариантах реализации изобретения выбор бурового долота включает в себя выбор бурового долота, которое демонстрирует эффективность бокового резания, определенную для уменьшения или ограничения скорректированной способности РУС в отношении интенсивности искривления. Способ также может включать в себя выбор размещения гибкой муфты, которая находится между секцией управления направлением бурения и секцией управления роторной управляемой системы, или выбор размещения гибкой муфты на расположенном вверх по стволу скважины конце секции управления роторной управляемой системы.
В некоторых вариантах реализации изобретения выбирают скорректированный модуль упругости и выбирают скорректированный наружный диаметр, при этом скорректированный модуль упругости ниже, чем начальный модуль упругости, а наружный диаметр больше, чем начальный наружный диаметр, так что скорректированная способность искривления больше, чем первоначальная способность искривления. В некоторых вариантах реализации изобретения внутренний диаметр гибкой муфты выбирают для размещения в нем модульного блока управления и датчиков. В некоторых вариантах реализации изобретения начальный наружный диаметр гибкой муфты выбирают таким образом, чтобы в нем находился суженный вниз участок. Скорректированное размещение, материал и комбинация параметров могут быть определены для обеспечения требуемой длины инструмента для РУС, жесткости на изгиб или напряжения изгиба, требуемой для гибкой муфты, жесткости на кручение или напряжения сдвига из-за кручения, требуемого для гибкой муфты.
В другом аспекте изобретение относится к роторной управляемой системе. Роторная управляемая система содержит буровое долото и секцию управления направлением бурения, соединенную с верхним концом бурового долота. Секция управления направлением бурения содержит по меньшей мере одну направляющую опорную подкладку, выдвигающуюся в боковом направлении для прижимания к стенке ствола скважины во время работы. Секция управления содержит электронное оборудования по меньшей мере для одного из параметров измерения операции бурения и для передачи инструкций в секцию управления направлением бурения. Гибкая муфта соединена между секцией управления направлением бурения и секцией управления, и гибкая муфта имеет более низкую жесткость на изгиб, чем секция управления направлением бурения, и изготовлена из материала, выбранного таким образом, чтобы отличаться от материала, выбранного для секции управления направлением бурения.
В некоторых вариантах реализации изобретения секция управления направлением бурения может быть изготовлена из стального материала, а гибкая муфта может быть изготовлена из аустенитного сплава на основе никеля и хрома, титана, бериллиевой меди или алюминия. Секция управления может содержать модульный блок управления и датчиков, причем модульный блок управления и датчиков может проходить по меньшей мере частично в гибкую муфту.
Реферат данного изобретения предназначен исключительно для того, чтобы предоставить Ведомству по патентам и товарным знакам США и широкой общественности способ, благодаря которому на основании краткого ознакомления можно быстро определить характер и сущность технического изобретения, и он представляет только один или несколько примеров.
Хотя были подробно проиллюстрированы различные примеры, данное изобретение не ограничено показанными примерами. Модификации и адаптации вышеприведенных примеров могут быть очевидны для специалистов в данной области техники. Такие модификации и адаптации находятся в пределах объема данного изобретения.
Группа изобретений относится к области наклонно-направленного бурения. Способ конфигурации роторной управляемой системы включает определение максимальной интенсивности искривления, необходимой для бурения ствола скважины по заданной траектории ствола скважины, определение комбинации параметров для гибкой муфты для обеспечения роторной управляемой системы достаточной гибкостью для достижения указанной максимальной интенсивности искривления, причем эти параметры включают наружный диаметр, внутренний диаметр, длину и модуль упругости, выбор материала для гибкой муфты на основании определенного модуля упругости и сборку роторной управляемой системы с гибкой муфтой с учетом комбинации параметров и выбранного материала. Обеспечиваются требуемые радиусы управления направлением бурения. 2 н. и 10 з.п. ф-лы, 10 ил.
1. Способ конфигурации роторной управляемой системы, включающий: определение максимальной интенсивности искривления, необходимой для бурения ствола скважины по заданной траектории ствола скважины;
определение комбинации параметров для гибкой муфты для обеспечения роторной управляемой системы достаточной гибкостью для достижения указанной максимальной интенсивности искривления, причем эти параметры включают наружный диаметр, внутренний диаметр, длину и модуль упругости;
выбор материала для гибкой муфты на основании определенного модуля упругости;
и сборку роторной управляемой системы с гибкой муфтой с учетом комбинации параметров и выбранного материала.
2. Способ по п. 1, дополнительно включающий выбор бурового долота, обладающего эффективностью бокового резания, определенной для того, чтобы заставить гибкую муфту сгибаться на заданный процент от ее способности при максимальной интенсивности искривления по заданной траектории ствола скважины, и сборку роторной управляемой системы с буровым долотом, и необязательно при этом эффективность бокового резания определяют для ограничения характеристики DLS роторной управляемой системы.
3. Способ по п. 1 или 2, дополнительно включающий выбор размещения гибкой муфты относительно секции управления направлением бурения и секции управления роторной управляемой системы, и необязательно при этом размещение гибкой муфты выбирают так, чтобы она находилась между секцией управления направлением бурения и секцией управления роторной управляемой системы.
4. Способ по п. 3, отличающийся тем, что материал, выбранный для гибкой муфты, отличается от материалов секции управления направлением бурения и секции управления, и необязательно при этом выбранный материал содержит по меньшей мере одно из группы, состоящей из: титана, аустенитных сплавов на основе никеля и хрома и беррилиевой меди.
5. Способ по любому из предшествующих пунктов, отличающийся тем, что комбинацию параметров определяют для обеспечения требуемой длины инструмента для РУС, жесткости на изгиб или напряжения изгиба, требуемого для гибкой муфты, жесткости на кручение или напряжения сдвига из-за кручения, требуемого для гибкой муфты или допуска DLS.
6. Способ конфигурации и развертывания роторной управляемой системы, включающий:
определение максимальной интенсивности искривления, необходимой для бурения ствола скважины по заданной траектории ствола скважины;
выбор комбинации параметров для гибкой муфты, причем параметры включают наружный диаметр, внутренний диаметр, длину и модуль упругости;
выбор материала для гибкой муфты на основании выбранного модуля упругости;
выбор размещения гибкой муфты внутри роторной управляемой системы;
определение начальной способности искривления роторной управляемой системы с учетом выбранного размещения, материала и комбинации параметров для гибкой муфты;
выбор скорректированного размещения, материала и комбинации параметров, определенных для получения скорректированной способности искривления, которая более приближена к максимальной требуемой интенсивности искривления, чем первоначальная способность искривления;
построение роторной управляемой системы на основании заданного размещения, материала и комбинации параметров
и развертывание роторной управляемой системы в стволе скважины для достижения максимальной интенсивности искривления, требуемой вдоль заданной траектории ствола скважины.
7. Способ по п. 6, дополнительно включающий выбор бурового долота с эффективностью бокового резания, определенной для того, чтобы заставить гибкую муфту сгибаться на заданный процент от скорректированной способности искривления при максимальной интенсивности искривления, требуемой вдоль заданной траектории ствола скважины, и необязательно при этом выбор бурового долота включает выбор бурового долота, которое демонстрирует эффективность бокового резания, определенную для уменьшения или ограничения скорректированной способности искривления роторной управляемой системы.
8. Способ по п. 7, дополнительно включающий выбор размещения гибкой муфты, которая находится между секцией управления направлением бурения и секцией управления роторной управляемой системы.
9. Способ по п. 6 или 7, дополнительно включающий выбор размещения гибкой муфты на расположенном вверх по стволу скважины конце секции управления роторной управляемой системы.
10. Способ по любому из пп. 6-8, отличающийся тем, что выбирают скорректированный модуль упругости и выбирают скорректированный наружный диаметр, при этом скорректированный модуль упругости ниже, чем начальный модуль упругости, а наружный диаметр больше, чем начальный наружный диаметр, так что скорректированная способность искривления больше, чем начальная способность искривления.
11. Способ по любому из пп. 6-8, отличающийся тем, что либо внутренний диаметр гибкой муфты выбирают так, чтобы в нем размещался модульный блок управления и датчиков, и/либо начальный наружный диаметр гибкой муфты выбирают так, чтобы в нем размещался сужающийся участок.
12. Способ по любому из пп. 6-8, отличающийся тем, что выбор скорректированного размещения, материала и комбинации параметров по меньшей мере частично основывается на требуемой длине инструмента для РУС, жесткости при изгибе или напряжении изгиба, требуемом для гибкой муфты, жесткости на кручение или напряжении сдвига из-за кручения, требуемом для гибкой муфты.
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |
| СПОСОБ БУРЕНИЯ НАКЛОННО НАПРАВЛЕННЫХ СКВАЖИН И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1994 |
|
RU2114273C1 |
| US 4699224 A, 13.10.1987 | |||
| US 5538091 A, 23.07.1996 | |||
| Способ приготовления лака | 1924 |
|
SU2011A1 |
| СПОСОБ ХИРУРГИЧЕСКОЙ КОРРЕКЦИИ СОЧЕТАННОГО ПОРАЖЕНИЯ СОННЫХ АРТЕРИЙ | 2010 |
|
RU2445019C1 |

