Предлагаемое изобретение относится к способам продольного управления самолетами комбинированной схемы, имеющими как заднее, так и переднее горизонтальное оперение.
Известен способ непосредственного управления подъемной силой, при котором в дополнение к заднему горизонтальному оперению используют переднее; он реализован на самолетах F-4CCV и YF-16CCV (см.: Цихош Э. Сверхзвуковые самолеты. - М.: Мир, 1983. - Стр. 72-75).
Указанный способ позволяет осуществлять нетрадиционные формы продольного движения самолета - изолированный тангаж, изолированное вертикальное перемещение и поворот фюзеляжа относительно вектора скорости (см.: Гуськов Ю.П., Загайнов Г.И. Управление полетом самолетов. - М: Машиностроение, 1980. - Стр. 141-144), - однако вопросы, связанные с повышением несущих свойств самолета за счет балансировки, при этом не рассматриваются.
Известны также способы управления самолетами схемы «бесхвостка с передним горизонтальным оперением», при которых переднее горизонтальное оперение используют в качестве вспомогательного органа управления продольным движением, а основным органом управления являются элевоны, представляющие собой функциональный аналог заднего горизонтального оперения с меньшим плечом, и способы управления самолетами схемы «утка», на которых переднее горизонтальное оперение является основным органом управления продольным движением (см.: Бауэрc П. Летательные аппараты нетрадиционных схем. - М.: Мир, 1991. - Стр. 8-10).
Недостатком указанных способов является то, что для самолетов схем «утка» и «бесхвостка с передним горизонтальным оперением» характерна тенденция к так называемому «клевку на нос», связанная с возможностью более раннего срыва потока на переднем горизонтальном оперении, чем на крыле; это не позволяет полностью реализовать установленный для самолета диапазон углов атаки.
Наиболее близким аналогом - прототипом является способ продольного управления самолетом Су-27М (обозначаемом также как Су-35) комбинированной схемы, созданным на базе самолета Су-27 нормальной схемы (см.: Современные боевые самолеты: Справочное пособие // Автор-составитель Н.И. Рябинкин. - Минск: «Элайда», 1997. - Стр. 53-56), при котором в систему управления передают сигнал от отклонения рычага управления по тангажу и сигналы по параметрам движения, а в системе управления формируют управляющие сигналы на переднее горизонтальное оперение и на заднее горизонтальное оперение, при этом в качестве основного органа управления продольным движением используют заднее горизонтальное оперение, угол отклонения которого формируют при суммировании входного сигнала от летчика и сигналов по параметрам движения, как на базовом самолете Су-27 (см.: Шенфинкель Ю.И. Система управления самолета Су-27. - Техника воздушного флота. - 1990. №2. - Стр. 49-54), а переднее горизонтальное оперение отклоняют на отрицательный угол с увеличением угла атаки самолета в целом (см.: Чернов Л.Г., Милованов А.Г. Основы методологии аэродинамического проектирования маневренного многорежимного самолета-истребителя. - М.: МАИ, 2004. - Стр. 130-132).
Недостатком указанного способа является то, что при его реализации повышение несущих свойств самолета за счет балансировки возможно при наличии статической неустойчивости, достижимой только на дозвуковых скоростях. Со смещением аэродинамического фокуса назад, наблюдаемым при сверхзвуковых скоростях, самолет становится статически устойчивым, что снижает его несущие свойства по сравнению со случаем нейтральной центровки.
Техническим результатом предлагаемого изобретения является повышение несущих свойств статически устойчивого самолета комбинированной схемы за счет балансировки при возможности избежать срыва потока на переднем горизонтальном оперении, являющемся основным органом управления продольным движением, и сохранить установленный диапазон эксплуатационных углов атаки.
Поставленный технический результат достигается тем, что в способе продольного управления самолетом комбинированной схемы, при котором в систему управления передают сигнал от отклонения рычага управления по тангажу и сигналы по параметрам движения, а в системе управления формируют управляющие сигналы на переднее горизонтальное оперение и на заднее горизонтальное оперение, формирование управляющего сигнала на переднее горизонтальное оперение осуществляют суммированием сигнала от отклонения рычага управления по тангажу с соответствующими сигналами по параметрам движения и ограничивают суммарный управляющий сигнал установленным допустимым значением угла атаки на переднем горизонтальном оперении, а формирование управляющего сигнала на заднее горизонтальное оперение осуществляют суммированием соответствующих сигналов по параметрам движения с остаточным сигналом, определяемым из соотношения:ϕост=Kго/пго(ϕпго-ϕпго упр), где Kго/пго - отношение абсолютных величин производных момента тангажа по углам отклонения переднего горизонтального оперения и заднего горизонтального оперения ϕпго - сигнал, соответствующий фактическому углу отклонения переднего горизонтального оперения при наличии ограничения по углу атаки на нем, ϕпго упр - управляющий сигнал на переднее горизонтальное оперение, получаемый суммированием сигнала от отклонения рычага управления по тангажу с сигналами по параметрам движения.
Перечень фигур:
 фиг.1 - блок-схема, реализующая предлагаемый способ продольного управления самолетом комбинированной схемы;
фиг.1 - блок-схема, реализующая предлагаемый способ продольного управления самолетом комбинированной схемы;
 фиг.2 - графики зависимостей несущих свойств самолета, а также углов отклонения органов продольного управления и угла атаки на переднем горизонтальном оперении от угла атаки самолета.
фиг.2 - графики зависимостей несущих свойств самолета, а также углов отклонения органов продольного управления и угла атаки на переднем горизонтальном оперении от угла атаки самолета.
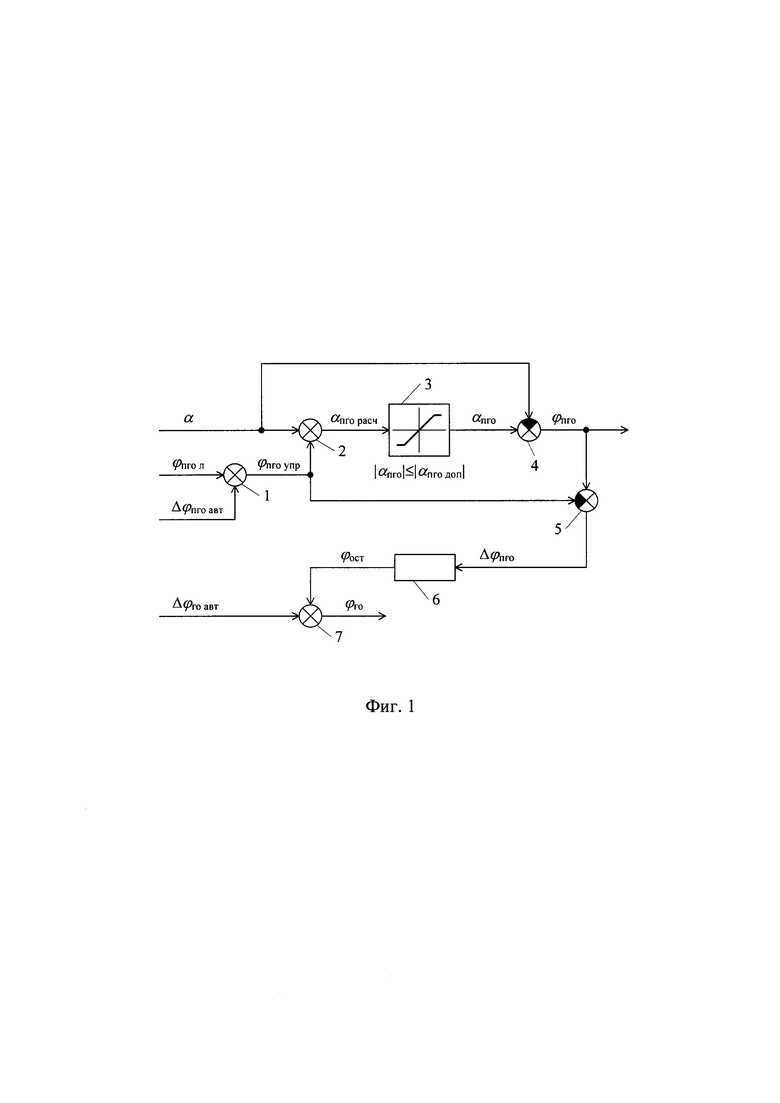
На фиг. 1 показана блок-схема, реализующая предлагаемый способ продольного управления самолетом комбинированной схемы, при котором переднее горизонтальное оперение используется в качестве основного органа управления продольным движением.
На блок-схеме обозначено:
1 - блок суммирования сигнала от отклонения рычага управления по тангажу, задаваемого летчиком, с сигналами по параметрам движения, поступающими на переднее горизонтальное оперение;
2 - блок суммирования управляющего сигнала на переднее горизонтальное оперение, получаемого в блоке 1, с сигналом, соответствующим текущему значению угла атаки;
3 - блок ограничения угла атаки на переднем горизонтальном оперении;
4 - блок формирования сигнала, соответствующего фактическому углу отклонения переднего горизонтального оперения;
5 - блок рассогласования между сигналом, соответствующим фактическому углу отклонения переднего горизонтального оперения, и управляющим сигналом на него;
6 - блок формирования остаточного сигнала;
7 - блок суммирования остаточного сигнала с сигналами по параметрам движения, поступающими на заднее горизонтальное оперение.
Предлагаемый способ продольного управления самолетом комбинированной схемы осуществляют следующим образом. В блоке 1 суммируют сигнал ϕпго л от отклонения рычага управления по тангажу, задаваемого летчиком, с результирующим сигналом по параметрам движения(т.е. суммой различных сигналов), поступающим на переднее горизонтальное оперение, от автоматизации управления самолетом Δϕпго авт, и тем самым получают управляющий сигнал на переднее горизонтальное оперение ϕпго упр. Этот сигнал, имеющий размерность угла, в блоке 2 суммируют с сигналом, соответствующим текущему значению угла атаки α и измеряемым в полете, в результате чего получают расчетный угол атаки на переднем горизонтальном оперении αпго расч. Поскольку величина угла атаки на переднем горизонтальном оперении αпго должна быть ограничена в пределах |αпго|≤|αпго доп| из условия недопущения срыва потока, то полученное значение αпго расч пропускают через блок 3, предусматривающий указанное ограничение как при положительных, так и при отрицательных углах атаки. Далее в блоке 4 путем вычитания α из ограниченного значения αпго формируют сигнал ϕпго, соответствующий фактическому углу отклонения переднего горизонтального оперения, который поступает на соответствующий привод. Этот сигнал в блоке 5 сравнивают со значением ϕпго упр и тем самым получают рассогласование Δϕпго=ϕпго-ϕпго упр. Если такое рассогласование не равно нулю, то это означает, что часть момента тангажа, связанная с отклонением переднего горизонтального оперения, недостаточна для достижения заданного значения α, а кроме того, для указанного случая всегда выполняется условие: sign(Δϕпго)=-sign(α). Поэтому рассогласование Δϕпго поступает в блок 6, где путем его умножения на передаточный коэффициент Kго/пго формируют остаточный сигнал ϕост, величина которого должна быть потребной для компенсации снижения момента тангажа от переднего горизонтального оперения, а кроме того, должно выполняться условие: sign(ϕост)=-sign(α). Именно для реализации указанных требований значение передаточного коэффициента Kго/пго должно быть положительным и представлять собой отношение абсолютных величин производных момента тангажа по углам отклонения переднего горизонтального оперения и заднего горизонтального оперения. Далее в блоке 7 величину ϕост суммируют с результирующим сигналом по параметрам движения (т.е. суммой различных сигналов), поступающим на заднее горизонтальное оперение, от автоматизации управления самолетом Δϕго авт, и тем самым получают фактический угол отклонения заднего горизонтального оперения ϕго, который поступает на соответствующий привод. Распределение сигналов по параметрам движения между передним горизонтальным оперением и задним горизонтальным оперением возможно различными способами для каждого конкретного самолета.
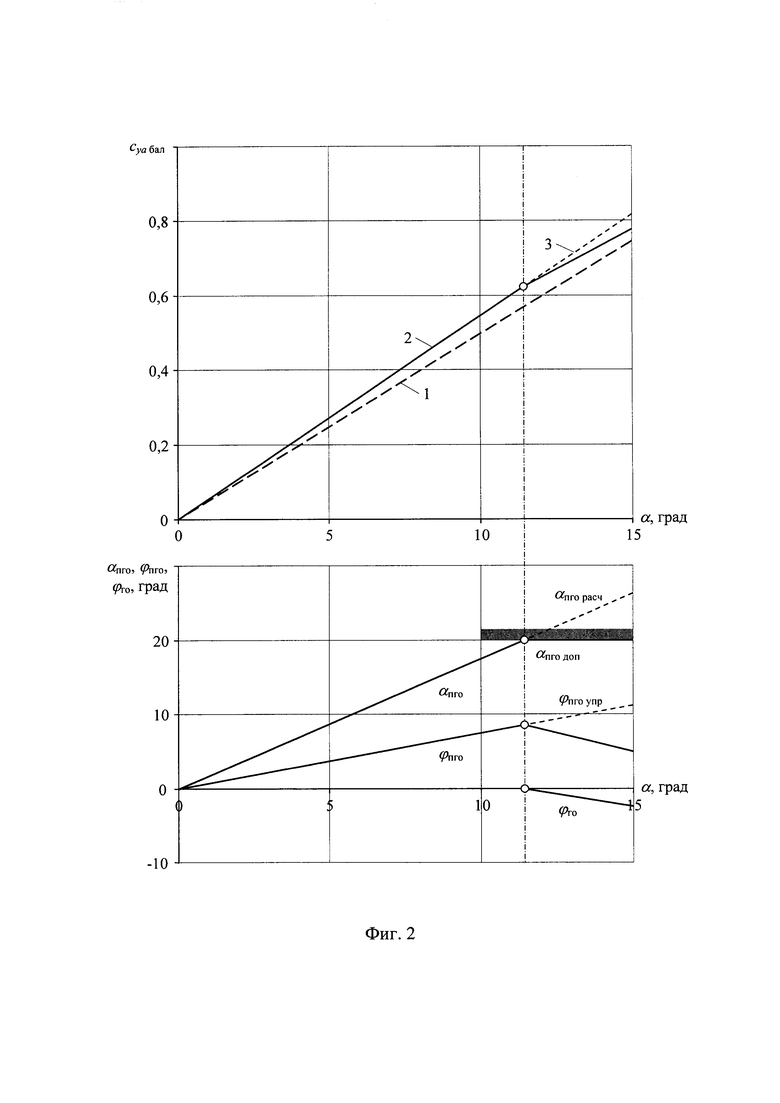
На фиг. 2 в качестве примера приведены расчетные зависимости несущих свойств самолета, а также углов отклонения органов продольного управления и угла атаки на переднем горизонтальном оперении от угла атаки самолета. На верхнем графике обозначены соответствующие зависимости балансировочного значения коэффициента подъемной силы:
1 - при использовании заднего горизонтального оперения в качестве основного органа управления продольным движением;
2 - при использовании переднего горизонтального оперения в качестве основного органа управления продольным движением и наличии на нем ограничений по углу атаки;
3 - при использовании переднего горизонтального оперения в качестве основного органа управления продольным движением и отсутствии на нем ограничений по углу атаки.
Видно, что при использовании предлагаемого способа продольного управления самолетом комбинированной схемы (зависимость 2) происходит повышение несущих свойств такого самолета по сравнению со случаем использования заднего горизонтального оперения в качестве основного органа управления продольным движением (зависимость 1). При выходе на ограничение по αпго несущие свойства несколько снижаются по сравнению со случаем отсутствия указанного ограничения (зависимость 3) за счет уменьшения ϕпго и роста абсолютной величины ϕго с противоположным знаком, что в итоге приводит к уменьшению подъемной силы. Все указанные зависимости рассчитаны для линейной области изменения аэродинамических характеристик всего самолета и его переднего горизонтального оперения. Поэтому в расчетах было принято, что α=0÷15°, αпго доп=20°.
Предлагаемое техническое решение позволяет на заданном значении угла атаки совершать, например: взлет и посадку с меньшей скоростью - для самолета любого назначения; маневр с большей перегрузкой на требуемой скорости или с той же перегрузкой на меньшей скорости - для маневренного самолета. Это подтверждает достижение технического результата, который заключается в повышении несущих свойств статически устойчивого самолета комбинированной схемы за счет балансировки при использовании переднего горизонтального оперения в качестве основного органа управления продольным движением. При этом степень повышения несущих свойств самолета возрастает с увеличением степени его продольной статической устойчивости.
| название | год | авторы | номер документа |
|---|---|---|---|
| Игнорирующий турбулентность самолет и датчик изменения угла атаки самолета | 2019 |
|
RU2710955C1 |
| КОМПЛЕКС АДАПТИВНЫЙ РАКЕТНО-АВИАЦИОННЫЙ | 2019 |
|
RU2720592C1 |
| КОМПЛЕКС АВИАЦИОННО-РАКЕТНЫЙ АДАПТИВНЫЙ | 2019 |
|
RU2720569C1 |
| БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2009 |
|
RU2409504C1 |
| УПРАВЛЕНИЕ "УТКА" (ВАРИАНТЫ) | 2012 |
|
RU2531706C2 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ СХЕМЫ "ФЛЮГЕРНАЯ УТКА" (КРАСНОВ-УТКА) | 2015 |
|
RU2609644C1 |
| БЕСПИЛОТНЫЙ АВИАЦИОННЫЙ РАКЕТНЫЙ КОМПЛЕКС И СПОСОБ ЕГО ПРИМЕНЕНИЯ | 2018 |
|
RU2690142C1 |
| КОНВЕРТОПЛАН | 2004 |
|
RU2282566C2 |
| УПРАВЛЕНИЕ "УТКА" -2 /ВАРИАНТЫ/ | 2012 |
|
RU2515817C2 |
| Многоцелевая сверхтяжелая транспортная технологическая авиационная платформа укороченного взлета и посадки | 2019 |
|
RU2714176C1 |
Изобретение относится к способу управления самолетом комбинированной схемы. Для управления самолетом в систему управления передают сигнал от отклонения рычага управления по тангажу и сигналы по параметрам движения, в системе управления формируют определенным образом управляющие сигналы на переднее и заднее горизонтальное оперение. Обеспечивается повышение несущих свойств статически устойчивого самолета комбинированной схемы, сохранение установленного диапазона эксплуатационных углов атаки. 2 ил. 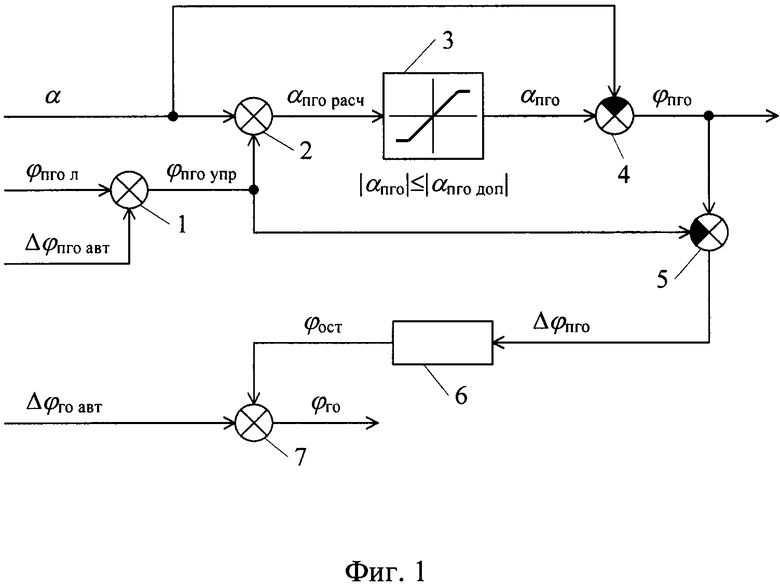
Способ продольного управления самолетом комбинированной схемы, при котором в систему управления передают сигнал от отклонения рычага управления по тангажу и сигналы по параметрам движения, а в системе управления формируют управляющие сигналы на переднее горизонтальное оперение и на заднее горизонтальное оперение, отличающийся тем, что формирование управляющего сигнала на переднее горизонтальное оперение осуществляют суммированием сигнала от отклонения рычага управления по тангажу с соответствующими сигналами по параметрам движения и ограничивают суммарный управляющий сигнал установленным допустимым значением угла атаки на переднем горизонтальном оперении, а формирование управляющего сигнала на заднее горизонтальное оперение осуществляют суммированием соответствующих сигналов по параметрам движения с остаточным сигналом, определяемым из соотношения: ϕост=Kго/пго(ϕпго-ϕпго упр), где Kго/пго - отношение абсолютных величин производных момента тангажа по углам отклонения переднего горизонтального оперения и заднего горизонтального оперения, ϕпго - сигнал, соответствующий фактическому углу отклонения переднего горизонтального оперения при наличии ограничения по углу атаки на нем, ϕпго упр _ управляющий сигнал на переднее горизонтальное оперение, получаемый суммированием сигнала от отклонения рычага управления по тангажу с сигналами по параметрам движения.
| СВЕДЕНИЕ К МИНИМУМУ ДИНАМИЧЕСКИХ НАГРУЗОК НА КОНСТРУКЦИЮ САМОЛЕТА | 2007 |
|
RU2401219C2 |
| МЕХАНИЗМ ДЛЯ ПОДАЧИ ПОСУДЫ В ОБЖИГАТЕЛЬНУЮ ПЕЧЬ | 1929 |
|
SU18251A1 |
| СПОСОБ УПРАВЛЕНИЯ САМОЛЕТОМ | 2003 |
|
RU2235042C1 |
| WO 2018224565 A2, 13.12.2018. | |||

