Изобретение относится к управлению рулями высоты пилотажных или боевых самолетов и других летательных аппаратов с аэродинамическими рулями.
Известно управление самолетам «Управление “утка” (варианты)», см. патент № RU 2410286, которое предусматривает флюгерное управление цельноповоротным ПГО (переднее горизонтальное оперение), в том числе - регрессивное. Это управление позволяет получить лучшую маневренность по тангажу, чем обычное управление, а регрессивный вариант обладает повышенной продольной устойчивостью.
Задача и технический результат изобретения - повышение противоштопорных свойств управления, точнее - их «смягчение», то есть более плавный самостоятельный уход самолета с опасных с точки зрения срыва потока на крыле режимов.
Как известно, центр масс самолета с нормальной устойчивостью во избежание неконтролируемого штопора должен быть впереди аэродинамического фокуса. И для уравновешивания этого пикирующего момента ЗГО создает отрицательную подъемную силу, причем - довольно большую. То есть ЗГО крадет у основного крыла его подъемную силу - около 10-15% в зависимости от центровки. В отличие от него ПГО (то есть «утка») свободно от этого недостатка, но обладает плохой продольной устойчивостью, особенно при отклонении центровки. Изобретение «Регрессивная флюгерная утка» (вариант упомянутого патента) сочетает достоинства обоих вариантов и свободно от обоих недостатков.
Более того, регрессивная флюгерная утка прощает все ошибки летчика - при заданной предельной разнице угла между флюгером и цельноповоротным ПГО летчик при всем желании не сможет вывести ПГО на закритические углы атаки (допустим, 12 градусов), какой бы неопытный он ни был. При поставке самолетов в малоразвитые страны это не последний фактор.
А при установке определенной степени регрессивности управления летчик при всем желании не сможет вывести и крыло на закритические углы атаки (например, при обнулении угла ПГО относительно потока при его положении относительно фюзеляжа вниз на 14-15 градусов).
Противоштопорные качества «утки» хорошо известны. Можно еще применить положительную или отрицательную крутку ПГО, это дополнительно придает ему другие противоположные качества. Обычно применяют уменьшение угла атаки у корня руля - это оттягивает момент срыва потока.
ВАРИАНТ 1. Но если сделать наоборот, то срыв потока будет наступать раньше, но зато постепенно. А это в сочетании с большей удельной нагрузкой рулей, чем у основного крыла, позволит усилить противоштопорные качества - если летчик, не считаясь с возможностями тяги, начнет лихачить и тупо задирать нос, то самолет постепенно, именно постепенно, опустит нос и сам наберет безопасную скорость. Такие действия самолета, кстати, дают сигнал летчику увеличить тягу двигателя и уменьшить тангаж.
Итак, данное управление имеет следующую крутку ПГО: у корневой части консолей рулей положительный угол атаки больше, чем на концах консолей. Величина крутки может достигать 10-11 градусов.
Конечно, если задаться целью - разбить самолет и на малой высоте и на приличной скорости резко взять штурвал на себя, то самолет уже ничто не спасет (летчика может спасти парашют).
ПРИМЕР: у корневой части консолей передних рулей самолета положительный угол атаки больше, чем на концах консолей.
Работает этот вариант так: при слишком большом отклонении рулей вверх (именно этот режим опасен с точки зрения сваливания) у корневой части рулей происходит срыв потока, который, однако, не распространяется на всю поверхность рулей. Подъемная сила рулей несколько уменьшается, что препятствует дальнейшему росту вертикального скольжения. Таким образом самолет исправляет ошибку летчика.
ВАРИАНТ 2. Можно «смягчить» противоштопорные качества по-другому: выбрать профиль ПГО переменной относительной толщины - с концов больше. Тогда срыв потока сначала наступит на более тонком профиле - у корня руля - и лишь затем постепенно начнет переходить на все большую часть руля.
ВАРИАНТ 3. Можно «смягчить» противоштопорные качества и так: выбрав форму в плане флюгера такой, чтобы срыв потока не очень сказывался на его подъемной силе, - например, форму правильного треугольника (возможны и более экзотические формы: равнобедренного треугольника, косостороннего треугольника, косостороннего ромба и т.п.). А удельную нагрузку на нем выбрать больше, чем на ПГО. Тогда срыв потока начнется с флюгера и самолет плавно опустит нос.
ВАРИАНТ 4. При электродистанционном управлении можно «смягчить» противоштопорные качества еще и так: электронно вмешавшись в передачу сигнала от задатчика летчика в орган исполнения «угол между ПГО и флюгером», можно с падением скорости уменьшать коэффициент передачи или вводить отрицательное смещение. Разумеется, делать это надо плавно, иначе самолет клюнет носом, что недопустимо.
Принцип действия любой следящей системы в том, что на входе в усилитель сравниваются сигналы от задатчика управления и от датчика положения управляемого органа (в данном случае - угла между флюгером и рулями) и получившийся положительный или отрицательный разностный сигнал усиливается и поступает на исполнительный механизм, который своим действием приводит в соответствие сигнал датчика с сигналом задатчика. В связи с этим в данном варианте возможно два подварианта.
ВАРИАНТ 4-а. Между задатчиком и усилителем находится управляемый делитель сигнала (например, обычный управляемый резистивный делитель напряжения). В этом случае усилителю «кажется», что задатчик выдает более слабый сигнал, и он уменьшает угол установки рулей так, чтобы сигнал от датчика уменьшился соответственно.
ВАРИАНТ 4-б. Между датчиком и усилителем находится управляемый усилитель сигнала (например, обычный усилитель напряжения). В этом случае усилителю «кажется», что датчик выдает более сильный сигнал, и он уменьшает угол установки рулей так, чтобы сигнал от датчика уменьшился соответственно.
ВАРИАНТ 4-в. Предыдущие два подварианта уменьшали угол установки флюгера относительно рулей в N раз в зависимости от падения скорости, причем это N с падением скорости росло от нуля до значительного максимума, почти обнуляя сигнал управления. То есть система управления вообще отстраняла неопытного летчика от управления по тангажу - как бы летчик ни дергал штурвалом, рули встанут в нейтральное положение (которое заранее выбирается при установке датчика) и самолет начнет плавно опускать нос и набирать скорость.
В данном подварианте с падением скорости подается сигнал смещения, для чего на тот же вход усилителя, на который подается сигнал с датчика, дополнительно подается сигнал с управляемого источника сигнала (например, от управляемого делителя напряжения, если сигнал с датчика постоянного тока, или от управляемого генератора, если сигнал с датчика переменного тока). В этом случае самолет слушается рулей, но только в одну сторону - в сторону уменьшения тангажа. Эта система управления лучше для опытного летчика, который при этом может очень резко опустить нос, а при хорошем угле атаки крыла - вновь резко поднять нос до приемлемого уровня. А вот для малоквалифицированного летчика лучше системы 4-а и 4-б.
ВАРИАНТ 5. И наконец, все функции по предупреждению штопора может взять на себя компьютер. В этом случае на вход процессора подаются уже упомянутые сигнал от задатчика управления, сигнал от датчика угла между флюгером и рулями, сигналы тангажа, скорости, высоты и, возможно, датчиков вертикального скольжения и тангажа, а выход процессора соединен с исполнительным механизмом вертикальных рулей. Чем больше скорость и высота (желательно, не над уровнем моря, а над поверхностью земли), тем больше свободы может позволить компьютер (процессор) по тангажу. При этом возможны два варианта обработки процессором сигналов скорости и высоты.
ВАРИАНТ 5-а. Сигналы скорости и высоты складываются, причем один из сигналов может иметь положительный или отрицательный коэффициент.
ВАРИАНТ 5-б. Сигналы скорости и высоты перемножаются, причем один из сигналов может возводиться в степень больше или меньше единицы.
Вертикальное скольжение носит скорее отрицательный характер, поэтому сигнал от датчика скольжения, если датчик есть, должен с небольшим коэффициентом вычитаться из суммы по варианту 5-а или из произведения по варианту 5-б. Или наоборот - умножается на сумму или прибавляется к произведению.
Наличие тангажа может вносить разное влияние - если он отрицательный (вниз), то резкое движения штурвала на себя только приветствуется и наоборот. Поэтому его влияние на результаты вычислений по вариантам 5-а, 5-б таково: сигнал датчика тангажа вычитается со своим знаком из суммы по варианту 5-а (тангаж вниз - отрицательный, тангаж вверх - положительный), или умножается на произведение по варианту 5-б с коэффициентом больше единицы, если тангаж отрицательный, и с коэффициентом меньше единицы, если тангаж положительный (горизонтальное положение, естественно, дает коэффициент, равный единице). Возможно и наоборот - умножается на сумму или прибавляется к произведению.
Возможно сочетание вариантов 5-а и 5-б.
Все варианты «смягчения» противоштопорных качеств можно сочетать, кроме варианта 5, - он в сочетаниях не нуждается. Зато он нуждается в дублировании, желательно - тройном.
На фиг. 1 показано, какой прихотливой может оказаться оптимальная форма флюгера 1 (подобная расширяющаяся к концам форма в авиации называется «крыло бабочки»). Причем, возможно, относительная толщина сечения флюгера непостоянна - за штангой 2, где поток возмущен, относительная толщина меньше и срыв потока там наступит раньше, в то время как концы «крыла бабочки» будут еще работать в режиме безотрывного обтекания.
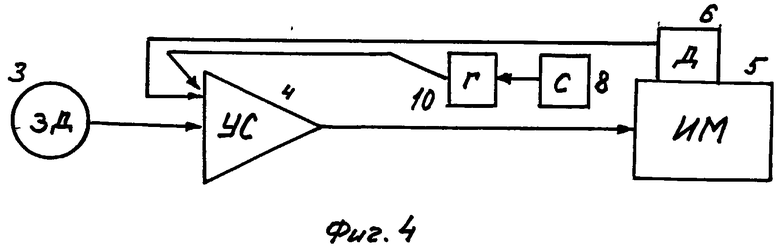
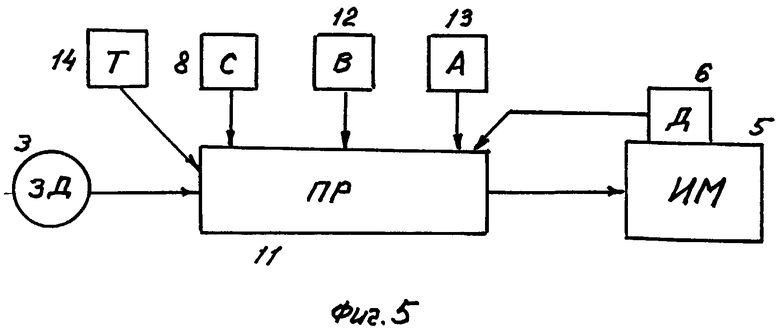
На фиг. 2, 3, 4, 5 показаны соответственно варианты 4-а, 4-б, 4-в и 5. На этих блок-схемах 3-ЗД - задатчик управления, связанный со штурвалом летчика, 4-УС - усилитель управления, 5-ИМ - исполнительный механизм (рулевая машинка), 6-Д - датчик угла между флюгером и рулями (если предусмотрены «ножницы» рулей, то на усилитель подаются сигнала с двух рулей в наполовину ослабленном виде). Это общие элементы для всех схем.
На фиг. 2 выход задатчика 3-ЗД соединен со входом делителя 7-ДЛ, который управляется датчиком скорости 8-С. Сигнал с делителя дальше идет на усилитель 4-УС, а с него - на исполнительный механизм 5-ИМ, причем датчик 6-Д сообщает усилителю информацию об угле между флюгером и рулями.
Работает схема так: при безопасной скорости усилитель по сигналу рассогласования между задатчиком и датчиком выдает напряжение на исполнительный механизм. При падении скорости делитель ослабляет сигнал задатчика и угол отклонения рулей уменьшается (вверх или вниз - все равно).
На фиг. 3 датчик 6-Д соединен со входом усилителя 4-УС через промежуточный управляемый усилитель 9-У, сигнал с которого в свою очередь поступает на вход усилителя 4-УС, а сигнал с задатчика 3-ЗД поступает на усилитель непосредственно.
Работает эта схема так: при падении скорости сигнал с датчика 6-Д увеличивается, как будто рули отклонены слишком сильно, и усилитель и исполнительный механизм уменьшают угол установки рулей относительно флюгера.
На фиг. 4 на вход усилителя подается сигнал с управляемого генератора 10-Г, который при падении скорости вводит смещение, соответствующее отклонению рулей вверх. И рули на самом деле отклоняются ниже того положения, которое задал им летчик.
На фиг. 5 показано управление с помощью процессора 11-ПР, на вход которого кроме упомянутых на предыдущих схемах сигналов с задатчика 3-ЗД, датчика 6-Д и датчика скорости 8-С поступают также сигналы с датчика высоты 12-В, датчика скольжения 13-А (угол атаки) и с датчика тангажа 14-Т. Процессор обрабатывает их по указанным выше алгоритмам и выдает управляющий сигнал на исполнительный механизм.
| название | год | авторы | номер документа |
|---|---|---|---|
| УПРАВЛЕНИЕ "УТКА" - 3 | 2012 |
|
RU2515818C2 |
| УПРАВЛЕНИЕ "УТКА" -2 /ВАРИАНТЫ/ | 2012 |
|
RU2515817C2 |
| УПРАВЛЕНИЕ "УТКА" (ВАРИАНТЫ) | 2007 |
|
RU2410286C2 |
| САМОЛЕТ СТАРОВЕРОВА (ВАРИАНТЫ) | 2011 |
|
RU2490169C2 |
| ЭЛЕКТРОДИСТАНЦИОННОЕ УПРАВЛЕНИЕ "УТКА" | 2015 |
|
RU2586741C1 |
| КОСМОЛЕТ СТАРОВЕРОВА (ВАРИАНТЫ) И АЛГОРИТМ ЕГО РАБОТЫ | 2012 |
|
RU2503592C1 |
| ПРОТИВОСАМОЛЕТНАЯ РАКЕТА | 2009 |
|
RU2439476C2 |
| САМОЛЕТ СТАРОВЕРОВА -2 | 2013 |
|
RU2544453C1 |
| СИСТЕМА НАВЕДЕНИЯ ПРОТИВОСАМОЛЕТНЫХ РАКЕТ | 2009 |
|
RU2400690C1 |
| СПОСОБ УПРАВЛЕНИЯ САМОЛЕТОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2504815C2 |


Управление «утка» относится к авиации. Управление содержит цельноповоротное флюгерное переднее горизонтальное оперение (ПГО). В первом варианте ПГО имеет следующую крутку рулей: у корневой части консолей рулей положительный угол атаки больше, чем на концах консолей. Во втором варианте ПГО имеет профиль рулей переменной относительной толщины - у корневой части рулей он меньше, а у концов консолей - больше. В третьем варианте ПГО имеет флюгер по форме в плане правильного треугольника, равнобедренного треугольника, косостороннего треугольника, косостороннего ромба. В четвертом варианте ПГО имеет электродистанционное управление с возможностью при снижении скорости плавно уменьшать коэффициент передачи в линии передачи сигнала от задатчика летчика в орган исполнения «угол между ПГО и флюгером» или плавно вводить отрицательное смещение в этот угол. В пятом варианте управление ПГО снабжено компьютерной системой, на вход процессора которой подаются сигнал от задатчика управления, сигнал от датчика угла между флюгером и рулями, сигналы тангажа, скорости и высоты, а выход процессора соединен с исполнительным механизмом вертикальных рулей. Группа изобретений направлена на повышение противоштопорных свойств. 5 н. и 9 з.п. ф-лы, 5 ил.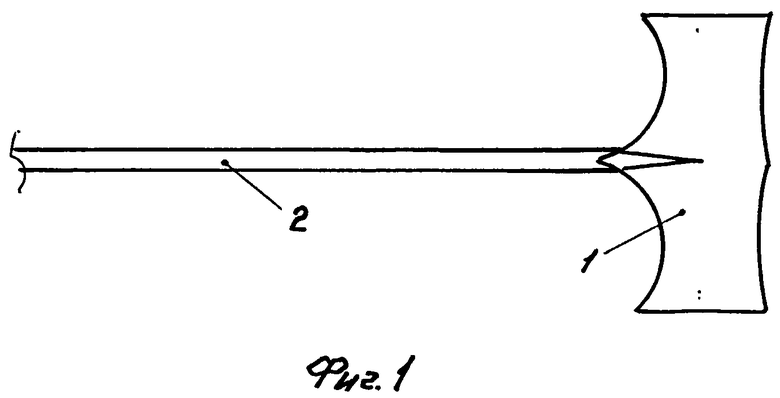
1. Управление «утка», содержащее цельноповоротное флюгерное переднее горизонтальное оперение (ПГО) и отличающееся тем, что имеет следующую крутку рулей: у корневой части консолей рулей положительный угол атаки больше, чем на концах консолей.
2. Управление «утка», содержащее цельноповоротное флюгерное ПГО и отличающееся тем, что профиль рулей переменной относительной толщины - у корневой части рулей он меньше, а у концов консолей - больше.
3. Управление «утка», содержащее цельноповоротное флюгерное ПГО и отличающееся тем, что имеет форму в плане флюгера такой, чтобы срыв потока мало сказывался на его подъемной силе - например, форму правильного треугольника, равнобедренного треугольника, косостороннего треугольника, косостороннего ромба.
4. Управление «утка», содержащее цельноповоротное флюгерное ПГО и отличающееся тем, что при электродистанционном управлении можно с падением скорости плавно уменьшать коэффициент передачи в линии передачи сигнала от задатчика летчика в орган исполнения «угол между ПГО и флюгером» или плавно вводить отрицательное смещение в этот угол.
5. Управление по п.4, отличающееся тем, что между задатчиком и усилителем находится управляемый делитель сигнала.
6. Управление по п.4, отличающееся тем, что между датчиком и усилителем находится управляемый усилитель сигнала.
7. Управление по п.4, отличающееся тем, что на тот же вход усилителя, на который подается сигнал с датчика, дополнительно подается сигнал с управляемого источника сигнала, например от управляемого делителя напряжения, если сигнал с датчика постоянного тока, или от управляемого генератора, если сигнал с датчика переменного тока.
8. Управление «утка», содержащее цельноповоротное флюгерное ПГО и отличающееся тем, что управление снабжено компьютерной системой, на вход процессора которой подаются сигнал от задатчика управления, сигнал от датчика угла между флюгером и рулями, сигналы тангажа, скорости и высоты, а выход процессора соединен с исполнительным механизмом вертикальных рулей.
9. Управление по п.8, отличающееся тем, что на вход процессора дополнительно подаются сигналы датчика вертикального скольжения и датчика тангажа.
10. Управление по п.8, отличающееся тем, что сигналы скорости и высоты складываются, причем один из сигналов может иметь положительный или отрицательный коэффициент.
11. Управление по п.10, отличающееся тем, что сигнал датчика тангажа вычитается со своим знаком из суммы по п.10 или умножается на эту сумму.
12. Управление по п.8, отличающееся тем, что сигналы скорости и высоты перемножаются, причем один из сигналов может возводиться в степень больше или меньше единицы.
13. Управление по п.12, отличающееся тем, что сигнал датчика тангажа умножается на произведение по п.12 с коэффициентом больше единицы, если тангаж отрицательный, и с коэффициентом меньше единицы, если тангаж положительный, или прибавляется к произведению со своим знаком.
14. Управление по п.8, отличающееся тем, что сигнал от датчика скольжения с некоторым коэффициентом вычитается из суммы сигналов скорости и высоты, причем один из этих сигналов может иметь положительный или отрицательный коэффициент, или же сигнал от датчика скольжения с некоторым коэффициентом вычитается из произведения сигналов скорости и высоты или наоборот - умножается на упомянутую сумму или прибавляется к упомянутому произведению.
| УПРАВЛЕНИЕ "УТКА" (ВАРИАНТЫ) | 2007 |
|
RU2410286C2 |
| Сплошная шина для автомобильных колес | 1925 |
|
SU8818A1 |
| Пресс-форма | 1977 |
|
SU680877A1 |

