Изобретение относится к ракетной технике, в которой создание жидкостных ракетных двигателей с минимально возможными массой, продольными и радиальными габаритами, что является всегда актуальным, особенно для жидкостных ракетных двигателей верхних ступеней ракет-носителей, а более конкретно к устройству жидкостного ракетного двигателя с управляемым вектором тяги, например однокамерного.
Известны жидкостные ракетные двигатели с управляемым вектором тяги, содержащие с возможностью качания вдоль главных плоскостей стабилизации сопла камер и карданный узел с цапфами в ортогональных плоскостях между траверсами и рамой, смонтированным между карданным узлом и наружным корпусом сопла камеры в районе минимального сечения сопла.
На таких двигателях управление вектором тяги обеспечивается за счет качания камеры в двух плоскостях посредством рулевых приводов, расположенных в плоскостях стабилизации ракеты, то есть, в вертикальных плоскостях, проходящих через оси карданного подвеса (см. справочник под редакцией Шустова И.Г. «Двигатели 1944-2000: авиационные, ракетные, морские, наземные», М., изд. «АКС - Конверсалт, 2000 г., стр. 96, РД-0120 и стр. 272, РД-191»).
Если для двигателей малых и средних тяг возможно использование прототипов из-за небольшого различия в их нагружении и перемещении несущих частей, то для двигателей больших тяг простое заимствование конструктивного исполнения узла качания приводит к значительному увеличению габаритов и массы за счет того, что при равенстве относительных перемещений абсолютные перемещения имеют значительную величину и для уменьшения перемещений приходится значительно увеличивать жесткость узлов, что приводит к увеличению массы.
В жидкостных ракетных двигателях больших тяг при увеличении тяги камеры увеличивается диаметр минимального сечения сопла камеры. При выполнении цапф даже на корпусе сопла в его минимальном сечении с помощью сварки из-за увеличения диаметра минимального сечения сопла камеры все линейные размеры увеличиваются пропорционально увеличению диаметра минимального сечения сопла, в том числе цапфы, кардан и участок корпуса имеют значительную массу, что не всегда целесообразно и приводит к росту общей массы камеры и двигателя в целом.
Известен также жидкостный ракетный двигатель с управляемым вектором тяги, содержащий с возможностью качания вдоль главных плоскостей стабилизации сопло камеры и карданный узел с с цапфами в ортогональных плоскостях между траверсами и рамой и смонтированным между карданным узлом и наружным корпусом сопла камеры в районе минимального сечения сопла разъемным бандажом с цапфами, установленным торцевыми частями на торцах кольцевых буртов корпуса сопла (см. патент РФ №2160376 от 21.12.1998 г. по МПК F02K 9/66) - прототип.
В приведенном жидкостном ракетном двигателе за счет применения разъемного бандажа между корпусом камеры и карданом можно снизить массу жидкостного ракетного двигателя, применяя более легкий титановый или алюминиевый сплав разъемного бандажа по сравнению со стальным корпусом сопла камеры в минимальном сечении, что позволяет избежать сварки разнородных материалов: стального корпуса камеры и разъемного бандажа из другого более легкого материала, например алюминиевого сплава или сплава из титана. Сварка легких сплавов разъемного бандажа и наружного корпуса сопла не всегда целесообразна, особенно при многократном использовании камеры в многоразовом жидкостном ракетном двигателе большой тяги с управляемым вектором тяги.
Указанное техническое решение обеспечивает уменьшение радиальных габаритов двигателя и уменьшение массы узла камеры, бандажа и кардана в целом при применении двигателя в стесненных условиях модернизируемых ракет-носителей при их форсировании в прежних размерах, что очень важно с точки зрения удешевления форсирования. Однако, на нестационарном режиме запуска камеры корпус сопла камеры нагревается и температура его повышается, в то время как бандаж нагревается с отставанием уровня температур от температуры корпуса из-за замедления передачи тепла теплопроводностью от корпуса сопла камеры, в связи с чем абсолютные линейные значения температурных расширений корпуса камеры, пропорциональные размеру диаметра минимального сечения сопла камеры, особенно для двигателей больших тяг вдоль продольной оси, и бандажа на нестационарном режиме так же получаются разные, в связи, с чем может нарушаться целостность разъемного их соединения даже с применением предварительного линейного натяга вдоль продольной оси.
Задачей предполагаемого изобретения является устранение вышеуказанных недостатков и расширения номенклатуры применяемых материалов для уменьшения массы и обеспечения гарантированного сопряжения бандажа с корпусом камеры, повышения надежности особенно для жидкостных ракетных двигателей больших тяг, уменьшение радиальных габаритов жидкостного ракетного двигателя, уплотнение компоновки двигателя и за счет этого уменьшение массы двигателя.
Приведенные выше недостатки исключены в предполагаемом изобретении.
Указанная задача изобретения достигается тем, что в известном жидкостном ракетном двигателе между разъемным бандажом и корпусом камеры и соосно им установлены конические втулки, ориентированные минимальными диаметрами первая на входное, а вторая на выходное от минимального сечение сопла, причем минимальными диаметрами закрепленными на торцах корпуса сопла, а максимальными -, первая на разъемном бандаже со стороны входной части сопла, а вторая - на разъемном бандаже со стороны выходной части сопла, причем в конусных стенках конических втулок выполнены сквозные радиальные пазы, образующие проушины, установленные последними в пазах втулок без взаимного соприкосновения проушин.
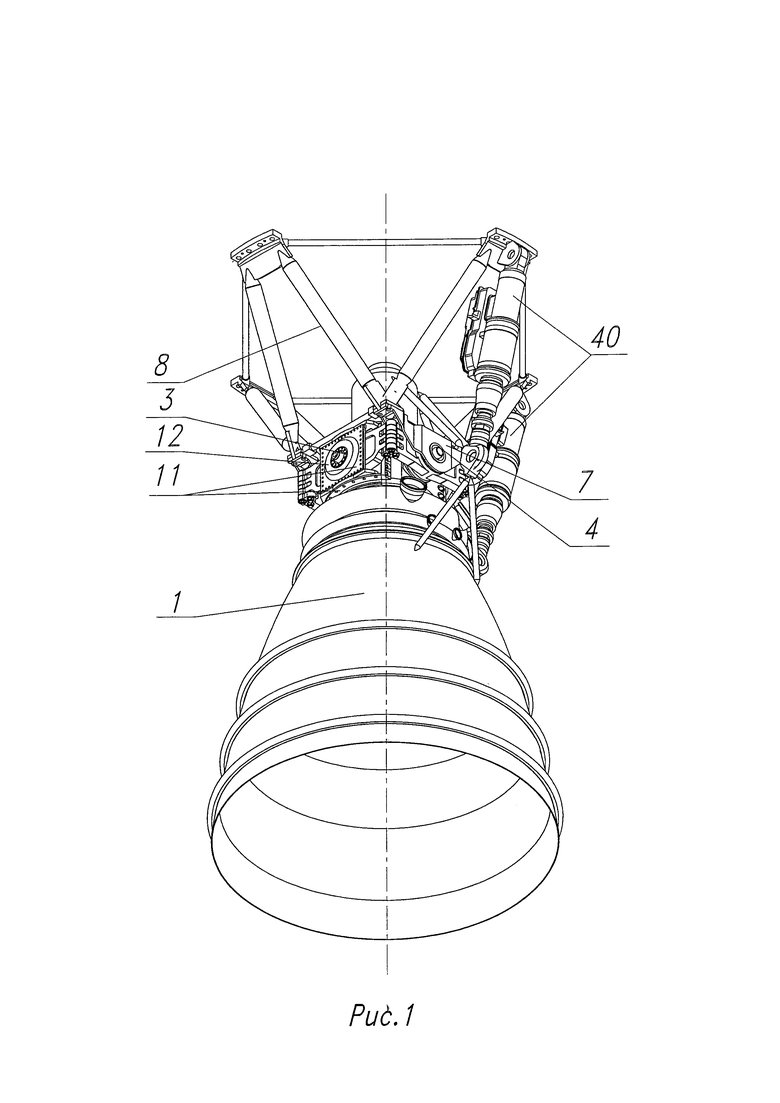
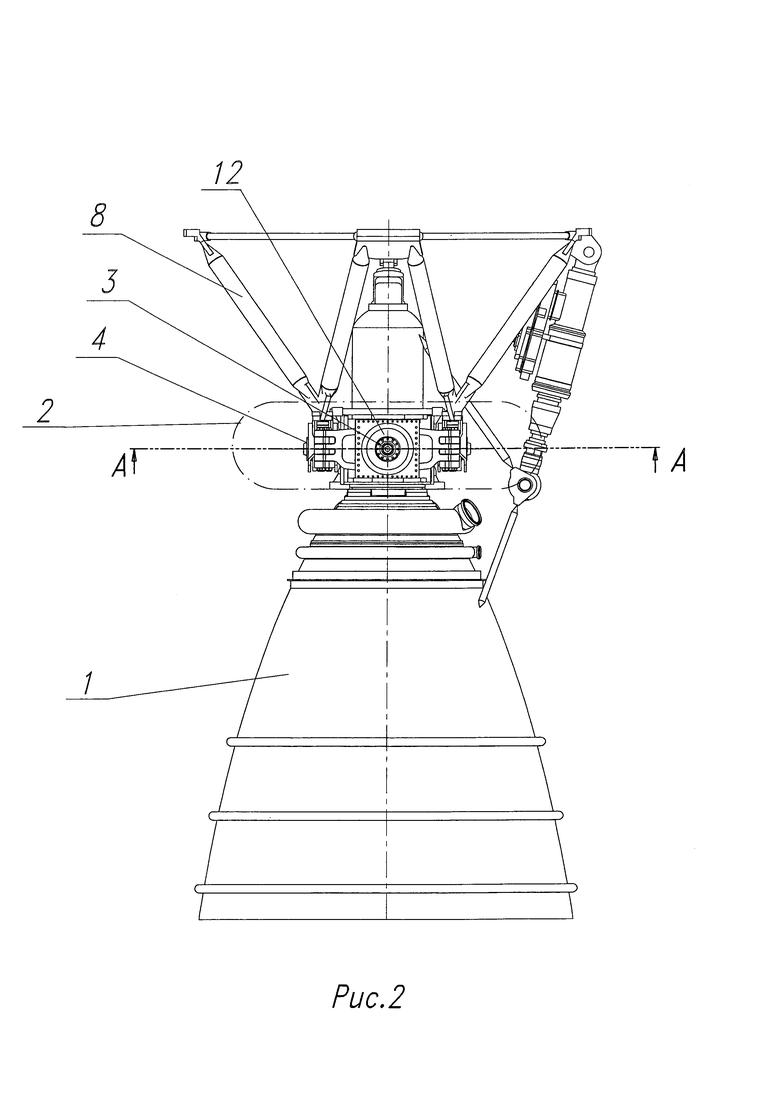
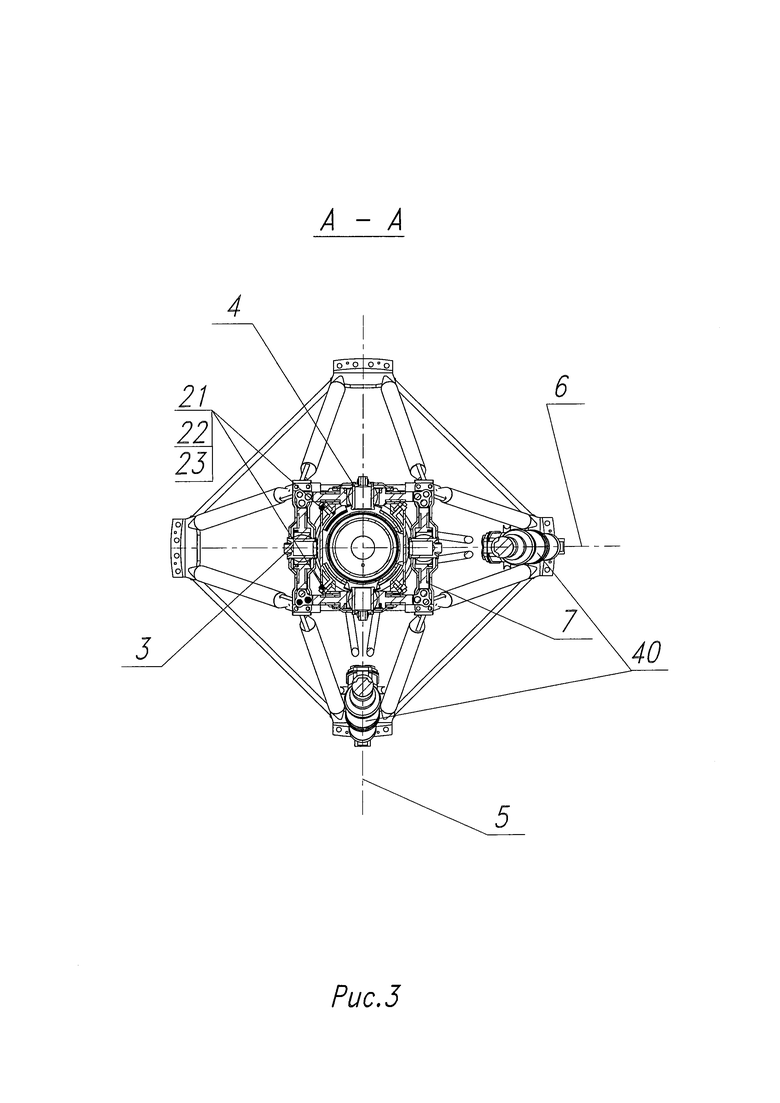
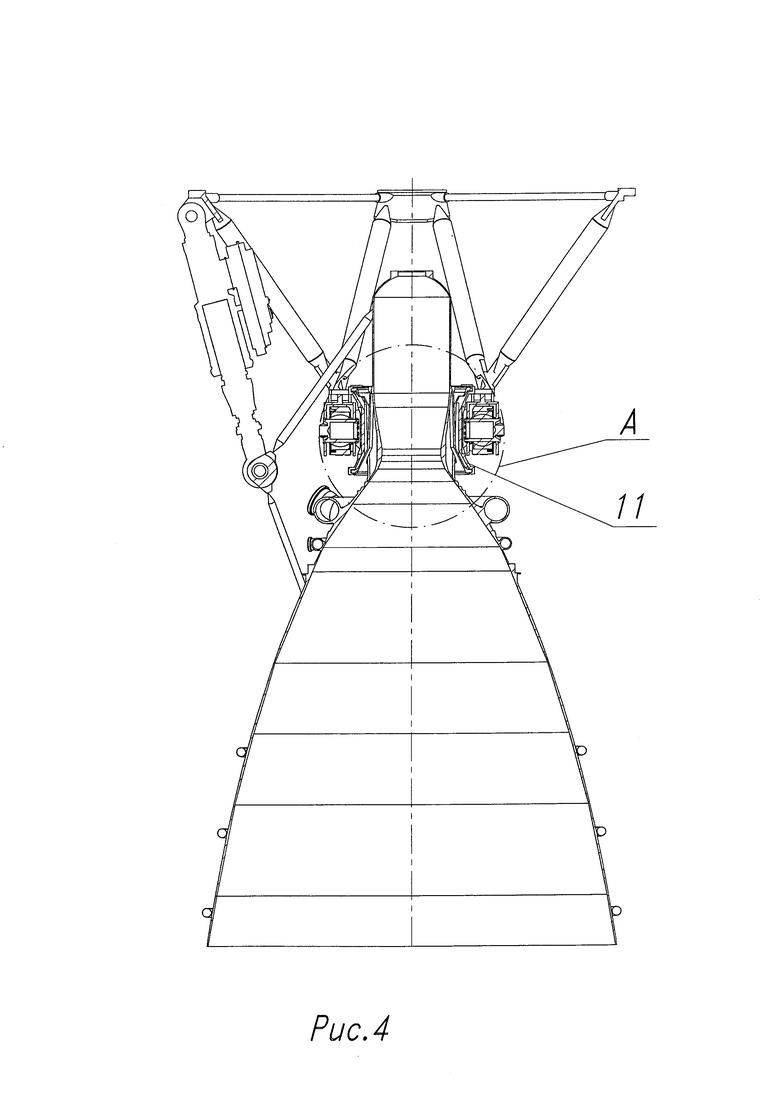
Предполагаемое изобретение представлено на чертеже фиг. 1-8, где показаны следующие узлы и детали:
1. Сопло камеры;
2. Карданный узел;
3. Цапфа;
4. Цапфа;
5. Плоскость стабилизации сопла;
6. Плоскость стабилизации сопла;
7. Траверса;
8. Рама;
9. Наружный корпус сопла камеры;
10. Минимальное сечение сопла камеры;
11. Разъемный бандаж;
12. Цапфа разъемного бандажа;
13. Первая торцевая часть разъемного бандажа;
14. Вторая торцевая часть разъемного бандажа;
15. Первый торец кольцевого бурта корпуса сопла;
16. Второй торец кольцевого бурта корпуса сопла;
17. Первый кольцевой бурт корпуса сопла;
18. Второй кольцевой бурт корпуса сопла;
19. Первая часть разъемного бандажа;
20. Вторая часть разъемного бандажа;
21. Болт;
22. Шайба;
23. Гайка;
24. Первая коническая втулка;
25. Вторая коническая втулка;
26. Первая часть первой конической втулки с минимальным диаметром сечения;
27. Входной участок сопла камеры;
28. Первая часть второй конической втулки с минимальным диаметром сечения;
29. Выходной участок сопла камеры;
30. Вторая часть первой конической втулки с максимальным диаметром сечения;
31. Выходной участок минимального сечения сопла;
32. Вторая часть второй конической втулки с максимальным диаметром сечения;
33. Входной участок минимального сечения сопла камеры;
34. Конусная стенка первой конической втулки;
35. Сквозной радиальный паз;
36. Проушина;
37. Конусная стенка второй конической втулки;
38. Сквозной радиальный паз;
39. Проушина;
40. Рулевой привод
Жидкостный ракетный двигатель с управляемым вектором тяги содержит сопло камеры 1 и карданный узел 2 цапфами 3 и 4 с возможностью качания вдоль главных плоскостей стабилизации 5 и 6 между траверсами 7 и рамой 8 и смонтированным между карданным узлом 2 и наружным корпусом 9 сопла камеры 1 в районе минимального сечения 10 сопла камеры 1 разъемным бандажом 11 с цапфами 12, соосными с цапфами карданного узла 3, установленным торцевыми частями 13 и 14 на торцах 15 и 16 кольцевых буртов 17 и 18 корпуса сопла 9 до минимального сечения 10 по потоку газов в сопле и после минимального сечения 10. Между разъемным бандажом 11, состоящим из двух частей 19 и 20 и более и корпусом сопла камеры 9, скрепленных друг с другом с помощью болтового соединения из болтов 21, шайб 22 и гаек 23, и соосно корпусу 9 сопла камеры 1 установлены конические втулки 24 и 25, ориентированные таким образом, что первая коническая втулка 24 своей первой частью с минимальным диаметром сечения 26 закреплена за корпус сопла 9 на входном участке 27 сопла камеры. Вторая коническая втулка 25 своей второй частью с минимальным диаметром сечения 28 закреплена за корпус сопла 9 на выходном участке 29. Первая коническая втулка 24 своей второй частью с максимальным диаметром сечения 30 закреплена за корпус разъемного бандажа 11 в его торцевой части 13 со стороны выходного участка 29 минимального сечения сопла камеры. Вторая коническая втулка 25 своей частью с максимальным диаметром сечения 32 закреплена за корпус разъемного бандажа 11 в его торцевой части 14 на входном участке 33 минимального сечения сопла камеры. В конусной стенке 34 первой конической втулки 24 выполнены сквозные радиальные пазы 35, образующие проушины 36. В конусной стенке 37 второй конической втулки 25 выполнены сквозные радиальные пазы 38, образующие проушины 39. Проушины 36 первой конической втулки 24 установлены в радиальных пазах 38 второй конической втулки 25 без соприкосновения проушин 36 и 39. Проушины 39 второй конической втулки 25 установлены в радиальных пазах 35 первой конической втулки 24 без соприкосновения проушин 39 и 36. Один из вариантов сборки конической втулок 24 и 25 с наружным корпусом сопла 9 и разъемным бандажом 11 заключается в следующем. Перед сборкой выходной части сопла с входной частью сопла на входную часть сопла монтируется первая коническая втулка 24 первой частью с минимальным диаметром сечения 26. После сборки выходного участка сопла 29 и входного участка сопла 27 с помощью сварки посредством накладки (из двух частей) монтируется вторая коническая втулка 25 своей первой частью с минимальным диаметром 28 за участок выходной части сопла 29, а второй частью с максимальным диаметром сечения 30 ориентирована в сторону входной части сопла 27. Разъемный бандаж 11 и конические втулки 24 и 25 на второй части первой конической втулки 30 и второй части второй конической втулки 32 с максимальными диаметрами сечения имеют фиксаторы, например в виде пазов и ответных выступов, препятствующих окружному проворачиванию корпуса сопла камеры 1 относительно разъемного бандажа 11. В разъемном бандаже 11 в одной плоскости стабилизации 5 выполнены цапфы 3 для соединения с карданным узлом 2, а в перпендикулярной плоскости стабилизации 6 в карданном узле 2 выполнены цапфы 4. Цапфы 4 далее соединены с посадочными местами в траверсах 7, соединенных с рамой 8. В жидкостном ракетном двигателе установлены рулевые приводы 40 для качания сопла камеры 1 в плоскостях стабилизации 5 и 6.
Жидкостный ракетный двигатель с управляемым вектором тяги работает следующим образом. При запуске жидкостного ракетного двигателя с управляемым вектором тяги высокотемпературные продукты сгорания поступают во входной участок сопла камеры 27, проходя минимальное сечение сопла камеры 10 и далее поступая в выходное сечение сопла камеры 29, нагревая наружный корпус сопла камеры 9 от нагреваемого охладителя и через ребра двухслойной оболочки (на фиг. 1 - не показаны) в нестационарном режиме до температуры, превышающей по величине температуру нагрева первой конической втулки 24 и температуру нагрева второй конической втулки 25, контактирующими с корпусом сопла камеры 9 только через первую часть первой конической втулки с минимальным диаметром сечения 26 и первую часть второй конической втулки с минимальным диаметром сечения 28 и тем более превышающей по величине температуру нагрева разъемного бандажа 11. За счет продольного температурного расширения наружного корпуса сопла 9 первая коническая втулка 24 первой частью первой конической втулки с минимальным диаметром сечения 26 и второй частью первой конической втулки с максимальным диаметром сечения 30 получает продольное встречное перемещение к второй части второй конической втулки с максимальным диаметром сечения 34 навстречу друг к другу, сжимая разъемный бандаж 11 со стороны первой торцевой части 13 разъемного бандажа 11 и второй торцевой части 14 разъемного бандажа 11, из-за чего в соединении отсутствует образование зазора и обеспечивается гарантированный натяг. В процессе дальнейшего разогрева всех составляющих соединения их температуры приближаются к стационарному распределению с сохранением гарантированного натяга между разъемным бандажом 11 и наружным корпусом сопла камеры 9. Как показали результаты расчетов нестационарного разогрева наружного корпуса сопла, конических втулок 24 и 25, разъемного бандажа 11 получен гарантированный натяг между сопрягаемыми разъемным бандажом 11 и коническими втулками 24 и 25, обеспечивающий возможность выполнения разъемного бандажа из материала с меньшей массой, отличающегося от материала корпуса сопла, например из титанового или алюминиевого сплава с меньшей массой, что снижает массу жидкостного ракетного двигателя и его радиальные габариты. Это позволяет уменьшить радиальные габариты и массу жидкостного ракетного двигателя и ракеты-носителя в целом.
Предварительные проработки предлагаемого технического решения для вновь разрабатываемого двигателя показали эффективность предлагаемого технического решения для значительного уменьшения радиальных габаритов и массы жидкостного ракетного двигателя, особенно для жидкостного ракетного двигателя большой тяги.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КОМПЛЕКТАЦИИ ЖИДКОСТНОГО РАКЕТНОГО ДВИГАТЕЛЯ С ДОЖИГАНИЕМ С УПРАВЛЯЕМЫМ ВЕКТОРОМ ТЯГИ | 2019 |
|
RU2708014C1 |
| МНОГОКАМЕРНЫЙ ЖИДКОСТНЫЙ РАКЕТНЫЙ ДВИГАТЕЛЬ | 2019 |
|
RU2703860C1 |
| ЖИДКОСТНЫЙ РАКЕТНЫЙ ДВИГАТЕЛЬ С ДОЖИГАНИЕМ ГЕНЕРАТОРНОГО ГАЗА | 2012 |
|
RU2490508C1 |
| ДВУХКАМЕРНЫЙ ЖИДКОСТНЫЙ РАКЕТНЫЙ ДВИГАТЕЛЬ С УПРАВЛЯЕМЫМ ВЕКТОРОМ ТЯГИ | 2016 |
|
RU2626618C1 |
| ЖИДКОСТНЫЙ РАКЕТНЫЙ ДВИГАТЕЛЬ | 2013 |
|
RU2524483C1 |
| КАРДАННАЯ ПОДВЕСКА | 2009 |
|
RU2444652C2 |
| ЖИДКОСТНЫЙ РАКЕТНЫЙ ДВИГАТЕЛЬ С ДОЖИГАНИЕМ | 1999 |
|
RU2173785C2 |
| ЖИДКОСТНЫЙ РАКЕТНЫЙ ДВИГАТЕЛЬ С ВЫДВИЖНЫМ СОПЛОМ | 2016 |
|
RU2612691C1 |
| ЖИДКОСТНЫЙ РАКЕТНЫЙ ДВИГАТЕЛЬ С ДОЖИГАНИЕМ С УПРАВЛЯЕМЫМ ВЕКТОРОМ ТЯГИ | 2020 |
|
RU2739660C1 |
| ЖИДКОСТНЫЙ РАКЕТНЫЙ ДВИГАТЕЛЬ С ДОЖИГАНИЕМ | 2022 |
|
RU2784462C1 |
Изобретение относится к ракетной технике. Жидкостный ракетный двигатель с управляемым вектором тяги, содержащий с возможностью качания вдоль главных плоскостей стабилизации сопло камеры и карданный узел с цапфами в ортогональных плоскостях между траверсами и рамой и смонтированным между карданным узлом и наружным корпусом сопла камеры в районе минимального сечения сопла разъемным бандажом с цапфами, установленным торцевыми частями на торцах кольцевых буртов корпуса сопла до минимального по потоку газов в сопле и после минимального сечения, при этом между разъемным бандажом и корпусом камеры и соосно им установлены конические втулки, ориентированные минимальными диаметрами первая - на входное, а вторая - на выходное от минимального сечение сопла, причем минимальными диаметрами, закрепленными на торцах корпуса сопла, а максимальными первая - на бандаже со стороны входной части сопла, а вторая - на бандаже со стороны выходной части сопла, причем в конусных стенках втулок выполнены сквозные радиальные пазы, образующие проушины, установленные последними в пазах втулок без взаимного соприкосновения проушин. Изобретение обеспечивает повышения надежности для жидкостных ракетных двигателей больших тяг, уменьшение радиальных габаритов жидкостного ракетного двигателя, уплотнение компоновки двигателя и за счет этого уменьшение массы двигателя. 8 ил.
Жидкостный ракетный двигатель с управляемым вектором тяги, содержащий с возможностью качания вдоль главных плоскостей стабилизации сопло камеры и карданный узел с цапфами в ортогональных плоскостях между траверсами и рамой и смонтированным между карданным узлом и наружным корпусом сопла камеры в районе минимального сечения сопла разъемным бандажом с цапфами, установленным торцевыми частями на торцах кольцевых буртов корпуса сопла до минимального по потоку газов в сопле и после минимального сечения, отличающийся тем, что в нем между разъемным бандажом и корпусом камеры и соосно им установлены конические втулки, ориентированные минимальными диаметрами первая - на входное, а вторая - на выходное от минимального сечение сопла, причем минимальными диаметрами, закрепленными на торцах корпуса сопла, а максимальными первая - на бандаже со стороны входной части сопла, а вторая - на бандаже со стороны выходной части сопла, причем в конусных стенках втулок выполнены сквозные радиальные пазы, образующие проушины, установленные последними в пазах втулок без взаимного соприкосновения проушин.
| УЗЕЛ КАЧАНИЯ КАМЕРЫ ЖИДКОСТНОГО РАКЕТНОГО ДВИГАТЕЛЯ (ЖРД) | 1998 |
|
RU2160376C2 |
| СПОСОБ УПРАВЛЕНИЯ ВЕКТОРОМ ТЯГИ ЖИДКОСТНОГО РАКЕТНОГО ДВИГАТЕЛЯ | 2008 |
|
RU2391546C1 |
| ЖИДКОСТНЫЙ РАКЕТНЫЙ ДВИГАТЕЛЬ С УПРАВЛЯЕМЫМ ВЕКТОРОМ ТЯГИ И БЛОК СОПЕЛ КРЕНА | 2010 |
|
RU2431756C1 |
| FR 2073451 A1, 01.10.1971 | |||
| Способ лечения травм спинного мозга | 1982 |
|
SU1326277A1 |

