Изобретение относится к электрогидравлическим системам управления изменением положения инерционной нагрузки, а именно, к электрогидравлическим системам подъема и опускания.
Известна электрогидравлическая система управления (ЭГСУ) по патенту РФ №2272181, которая наиболее близка по технической сущности к заявляемому техническому решению и принята за прототип.
Данная ЭГСУ содержит гидробак, насос, вал которого кинематически соединен с валом регулируемого электродвигателя, всасывающая гидролиния насоса соединена с гидробаком, блок управления, исполнительный гидродвигатель, гидрораспределитель.
Недостатком данной ЭГСУ является то, что при изменения положения инерционной нагрузки в режиме, когда вектор скорости перемещения совпадет по направлению с вектором момента неуравновешенности (режим попутной нагрузки), инерционная нагрузка с гидродвигателем образует колебательное звено (инерционная масса на гидравлической пружине). Кроме того, дросселирующий гидрораспределитель также представляет собой колебательное звено (золотник с возвратной пружиной) и при наличии нестабильного трения в золотниковой паре дросселирующего гидрораспределителя, например, при загрязнении рабочей жидкости, вышеуказанные причины приводят к возникновению автоколебаний инерционной нагрузки в ЭГСУ, что сказывается на надежности ЭГСУ.
Недостатком ЭГСУ также является сложность ее конструкции.
Целью заявляемого изобретения является повышение надежности ЭГСУ за счет исключения вышеуказанных автоколебаний и упрощение ее конструкции.
Указанная цель достигается тем, что в электрогидравлическую систему управления, содержащую гидробак, насос, вал которого кинематически соединен с валом регулируемого электродвигателя, всасывающая гидролиния насоса соединена с гидробаком, блок управления, исполнительный гидродвигатель, гидрораспределитель, введены датчик относительного положения инерционной нагрузки, гидродроссель, пульт управления для выдачи команд на изменение положения инерционнной нагрузки, обратный клапан, причем гидрораспределитель выполнен двухлинейным двухпозиционным с электромагнитным управлением, при этом первый и второй выходы пульта управления соединены с первым и вторым входами блока управления, первый выход блока управления соединен с управляющим входом гидрораспределителя, второй выход блока управления соединен с первым входом регулируемого электродвигателя, второй вход регулируемого электродвигателя соединен с общей шиной питания, третий вход блока управления соединен с выходом датчика относительного положения, четвертый вход блока управления соединен с положительной шиной питания, выход насоса через обратный клапан соединен с первым входом исполнительного гидродвигателя и с гидравлическим входом гидрораспределителя, выход гидрораспределителя соединен со вторым входом исполнительного гидродвигателя и через гидродроссель с гидробаком.
При этом блок управления содержит сумматор, компаратор, интегратор с ограничением выходного напряжения, широтно-импульсный модулятор (ШИМ), импульсный усилитель, первый, второй и третий ключи, причем вход компаратора соединен с третьим входом блока управления, выход компаратора соединен с управляющим входом первого ключа, вход первого ключа соединен с источником опорного напряжения, выход первого ключа соединен с входом интегратора с ограничением выходного напряжения, выход интегратора с ограничением выходного напряжения соединен с первым инвертирующим входом сумматора, второй неинвертирующий вход сумматора соединен с выходом второго ключа, вход второго ключа соединен с источником опорного напряжения, управляющий вход второго ключа соединен с первым входом блока управления, выход сумматора соединен с входом ШИМ, выход ШИМ соединен с первым управляющим входом импульсного усилителя, второй силовой вход импульсного усилителя соединен с четвертым входом блока управления, выход импульсного усилителя является вторым выходом блока управления, второй вход блока управления соединен с управляющим входом третьего ключа, вход третьего ключа соединен с четвертым входом блока управления, выход третьего ключа является первым выходом блока управления.
Материалы заявки поясняются графическими материалами, где:
- на Фиг. 1 представлена структурно-функциональная схема заявляемой системы.
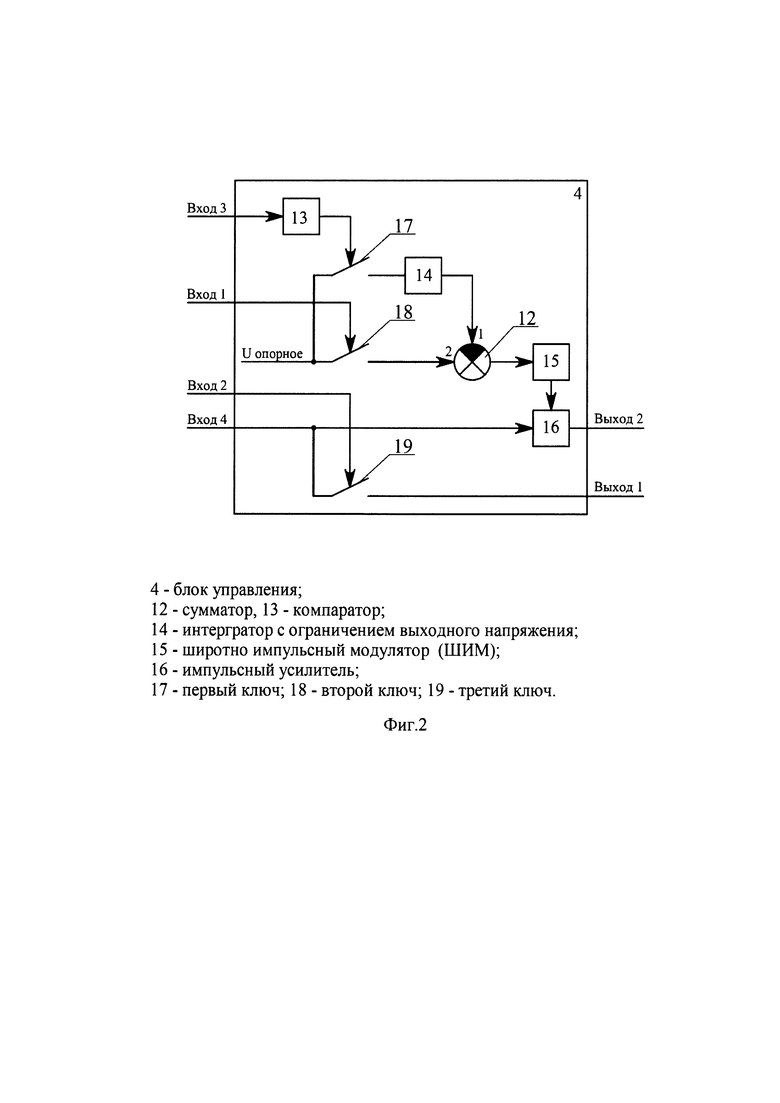
- на Фиг. 2 представлена структурно-функциональная схема блока управления.
Электрогидравлическая система управления (фиг. 1) содержит гидробак 1, насос 2, вал которого кинематически соединен с валом регулируемого электродвигателя 3, всасывающая гидролиния насоса 2 соединена с гидробаком 1, блок управления 4, исполнительный гидродвигатель 5, гидрораспределитель 6, датчик относительного положения 7 инерционной нагрузки 8, гидродроссель 9, пульт управления 10 для выдачи команд на изменив положения нагрузки, обратный клапан 11, причем гидрораспределитель 6 выполнен двухлинейным двухпозиционным с электромагнитным управлением, при этом первый и второй выходы пульта управления 10 соединены с первым и вторым входами блока управления 4, первый выход блока управления 4 соединен с управляющим входом гидрораспределителя 6, второй выход блока управления 4 соединен с первым входом регулируемого электродвигателя 3, второй вход регулируемого электродвигателя 3 соединен с общей шиной питания, третий вход блока управления 4 соединен с выходом датчика относительного положения 7, четвертый вход блока управления 4 соединен с положительной шиной питания, выход насоса 2 через обратный клапан 11 соединен с первым входом исполнительного гидродвигателя 5 и с гидравлическим входом гидрораспределителя 6, выход гидрораспределителя 6 соединен со вторым входом исполнительного гидродвигателя 5 и через гидродроссель 9 с гидробаком 3.
Блок управления 4 (фиг. 2) содержит сумматор 12, компаратор 13, интегратор с ограничением выходного напряжения 14, ШИМ 15, импульсный усилитель 16, первый 17, второй 18 и третий 19 ключи, причем вход компаратора 13 соединен с третьим входом блока управления 4, выход компаратора 13 соединен с управляющим входом первого 17 ключа, вход первого 17 ключа соединен с источником опорного напряжения, выход первого 17 ключа соединен с входом интегратора с ограничением выходного напряжения 14, выход интегратора с ограничением выходного напряжения 14 соединен с первым инвертирующим входом сумматора 12, второй неинвертирующий вход сумматора 12 соединен с выходом второго 18 ключа, вход второго 18 ключа соединен с источником опорного напряжения, управляющий вход второго 18 ключа соединен с первым входом блока управления 4, выход сумматора 12 соединен с входом ШИМ 15, выход ШИМ 15 соединен с первым управляющим входом импульсного усилителя 16, второй силовой вход импульсного усилителя 16 соединен с четвертым входом блока управления 4, выход импульсного усилителя 16 является вторым выходом блока управления 4, второй вход блока управления 4 соединен с управляющим входом третьего 19 ключа, вход третьего 19 ключа соединен с четвертым входом блока управления 4, выход третьего ключа 19 является первым выходом блока управления 4.
ЭГСУ работает следующим образом.
Для подъема инерционной нагрузки 8 (фиг. 1) оператор с пульта управления 10 подает команду «ПОДЪЕМ». Сигнал с первого выхода пульта управления 10 поступает на первый вход блока управления 4 (фиг. 2), при этом замыкается второй 18 ключ, сигнал с выхода сумматора 12 обеспечивает состояние ШИМ 15, соответствующее полному открытию импульсного усилителя 16. Приводной двигатель 3 (фиг. 1), один из входов которого соединен с общей шиной питания, а другой соединен со вторым выходом блока управления 4, развивает номинальные обороты, а насос 2 - номинальный расход рабочей жидкости. С выхода насоса 2 рабочая жидкость через обратный клапан 11 поступает на первый вход исполнительного гидродвигателя 5, при этом начинается подъем инерционной нагрузки 8 со скоростью, определяемой производительностью насоса 2, параметрами исполнительного гидродвигателя 5 и кинематикой инерционной нагрузки 8.
При изменении положения инерционной нагрузки 8 сигнал с выхода датчика положения 7 поступает на третий вход блока управления 4. При подъеме инерционной нагрузки 8 за несколько градусов до предельного угла подъема сигнал с датчика положения 7, поступающий на третий вход блока управления 4, становится достаточным для переключения компаратора 13 (фиг. 2) в блоке управления 4, при этом происходит замыкание первого 17 ключа, опорное напряжение поступает на вход интегратора 14, с выхода которого плавно изменяющееся напряжение поступает на первый инвертирующий вход сумматора 12. Уменьшающееся напряжение на выходе сумматора 12 приводит к изменению скважности ШИМ 15, соответственно происходит плавное снижение напряжения на приводном двигателе 3 (фиг. 1), плавное снижение скорости вращения вала приводного двигателя 3 и производительности насоса 2 и как следствие скорости изменения положения инерционной нагрузки 8. При этом величина скорости подхода инерционной нагрузки 8 к предельному углу подъема определяется остаточной скважностью ШИМ 15, которая, в свою очередь, определяется соотношением опорного напряжения (U опорное (фиг. 2)) и напряжения насыщения интегратора 14. Снижение скорости инерционной нагрузки 8 при подходе к предельному углу подъема реализовано с целью снижения динамических нагрузок на конструктивные элементы.
Для режима опускания инерционной нагрузки 8 (фиг. 1) в исходное (походное) положение с пульта управления 10 подается команда «ОПУСКАНИЕ», при этом с второго выхода пульта управления 10 поступает сигнал на второй вход блока управления 4, в блоке управления 4 замыкается третий 19 (фиг. 2) ключ и подается напряжение на электромагнит гидрораспределителя 6 (фиг. 1). Гидрораспределитель 6 переводится в открытое состояние, рабочая жидкость с первого входа исполнительного гидродвигателя 5 под действием попутной нагрузки через гидрораспределитель 6 и гидродроссель 9 вытесняется в гидробак 1, а также с учетом перепада давления на гидродросселе 9 частично на второй вход исполнительного гидродвигателя 5 для восполнения рабочей жидкости.
Скорость опускания инерционной нагрузки 8 определяется параметрами гидродросселя 9 и параметрами самой инерционной нагрузки 8. В связи с тем, что гидрораспределитель 6 выполнен двухлинейным двухпозиционным с электромагнитным управлением релейного типа, и отсутствием в схеме других регулируемых элементов упрощают схему и исключаются автоколебания.
Тем самым повышается надежность ЭГСУ. Экспериментальные испытания ЭГСУ в составе стенда, имитирующего подъем и опускание инерционной нагрузки, подтвердили ее надежность и работоспособность.
| название | год | авторы | номер документа |
|---|---|---|---|
| Электрогидравлическая система управления | 2018 |
|
RU2708477C1 |
| Электрогидравлическая система управления | 2016 |
|
RU2641192C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ | 2007 |
|
RU2347950C1 |
| Электрогидравлическая система | 2021 |
|
RU2797330C2 |
| Электрогидравлическая система управления | 2018 |
|
RU2682052C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ | 2002 |
|
RU2215911C1 |
| Система наведения и стабилизации пакета направляющих боевой машины реактивной системы залпового огня | 2017 |
|
RU2669903C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ | 2004 |
|
RU2272181C1 |
| Электрогидравлическая система управления | 2020 |
|
RU2761503C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ (ВАРИАНТЫ) | 1999 |
|
RU2162551C2 |

Система предназначена для управления изменением положения инерционной нагрузки. Система содержит гидробак, насос, вал которого кинематически соединен с валом регулируемого электродвигателя, всасывающая гидролиния насоса соединена с гидробаком, блок управления, исполнительный гидродвигатель, гидрораспределитель, введены датчик относительного положения инерционной нагрузки, гидродроссель, пульт управления для выдачи команд на изменение положения инерционнной нагрузки, обратный клапан, причем гидрораспределитель выполнен двухлинейным двухпозиционным с электромагнитным управлением. Технический результат - повышение надежности системы и упрощение ее конструкции. 1 з.п. ф-лы, 2 ил.
1. Электрогидравлическая система управления, содержащая гидробак, насос, вал которого кинематически соединен с валом регулируемого электродвигателя, всасывающая гидролиния насоса соединена с гидробаком, блок управления, исполнительный гидродвигатель, гидрораспределитель, отличающаяся тем, что в нее введены датчик относительного положения инерционной нагрузки, гидродроссель, пульт управления, для выдачи команд на изменение положения нагрузки, обратный клапан, причем гидрораспределитель выполнен двухлинейным двухпозиционным с электромагнитным управлением, при этом первый и второй выходы пульта управления соединены с первым и вторым входами блока управления, первый выход блока управления соединен с управляющим входом гидрораспределителя, второй выход блока управления соединен с первым входом регулируемого электродвигателя, второй вход регулируемого электродвигателя соединен с общей шиной питания, третий вход блока управления соединен с выходом датчика относительного положения, четвертый вход блока управления соединен с положительной шиной питания, выход насоса через обратный клапан соединен с первым входом исполнительного гидродвигателя и с гидравлическим входом гидрораспределителя, выход гидрораспределителя через гидродроссель соединен с гидробаком и со вторым входом исполнительного гидродвигателя.
2. Электрогидравлическая система по п. 1, отличающаяся тем, что блок управления содержит сумматор, компаратор, интегратор с ограничением выходного напряжения, широтно импульсный модулятор, импульсный усилитель, первый, второй и третий ключи, причем вход компаратора соединен с третьим входом блока управления, выход компаратора соединен с управляющим входом первого ключа, вход первого ключа соединен с источником опорного напряжения, выход первого ключа соединен с входом интегратора с ограничением выходного напряжения, выход интегратора с ограничением выходного напряжения соединен с первым инвертирующим входом сумматора, второй неинвертирующий вход сумматора соединен с выходом второго ключа, вход второго ключа соединен с источником опорного напряжения, управляющий вход второго ключа соединен с первым входом блока управления, выход сумматора соединен с входом широтно импульсного модулятора, выход широтно-импульсного модулятора соединен с первым управляющим входом импульсного усилителя, второй силовой вход импульсного усилителя соединен с четвертым входом блока управления, выход импульсного усилителя является вторым выходом блока управления, второй вход блока управления соединен с управляющим входом третьего ключа, вход третьего ключа соединен с четвертым входом блока управления, выход третьего ключа является первым выходом блока управления.
| Электрогидравлическая система управления | 2016 |
|
RU2641192C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ | 2007 |
|
RU2347950C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ | 2004 |
|
RU2272181C1 |
| DE 10319484 B4, 03.07.2008 | |||
| US 20150075148 A1,19.03.2015. | |||

