Изобретение относится к системам автоматического управления, конкретнее к приводам наведения вооружением боевых машин (БМ).
Известны приводы наведения изделия 9П616, с устройством данных приводов можно ознакомиться в техническом описании и инструкции по эксплуатации ПБ1.342.053 ТО. Привод качающейся части (КЧ) данного изделия выполнен объемным гидроприводом замкнутого типа, причем приводным двигателем для насоса привода КЧ является электродвигатель постоянного тока. Данные приводы кроме режима наведения на заданные координаты цели используются для согласования направляющей с досылателем транспортно-заряжающей машины в режиме загрузки и разгрузки. Применение приводного электродвигателя постоянного тока для вращения насоса привода КЧ существенно ограничивает мощность привода, что снижает скорость наведения КЧ и приводит к увеличению времени наведения на заданные координаты и является недостатком изделия 9П616.
Известна также электрогидравлическая система (ЭГС) по патенту №2641192, которая наиболее близка по технической сущности к заявляемому техническому решению и принята в качестве прототипа. Прототип содержит гидробак, регулируемый насос с регулятором давления, электрогидравлический привод который включает в себя пропорциональный гидрораспределитель, пульт управления, сумматор, широтно-импульсный модулятор, дифференцирующее звено, датчик относительного положения, установленный на объекте управления, датчик положения золотника пропорционального гидрораспределителя, гидрозамок, исполнительный гидродвигатель, кинематически соединенный с объектом управления, напорная магистраль регулируемого насоса гидравлически соединена со входом электрогидравлического привода, всасывающая полость насоса и сливная магистраль электрогидравлического привода соединены с гидробаком, выход пульта управления соединен с неинвертирующим входом сумматора, первый инвертирующий вход которого соединен с выходом датчика положения золотника пропорционального гидрораспределителя, а выход датчика относительного положения объекта управления через дифференцирующее звено соединен со вторым инвертирующим входом сумматора, выход которого соединен с входом широтно-импульсного модулятора, выходы которого соединены с управляющими входами пропорционального гидрораспределителя, гидравлический вход электрогидравлического привода соединен с первым входом пропорционального гидрораспределителя, сливная гидролиния электрогидравлического привода соединена со вторым входом пропорционального гидрораспределителя, первый и второй выходы пропорционального гидрораспределителя гидравлически соединены через гидрозамок с входами исполнительного гидродвигателя.
Прототипу присущ недостаток, связанный с режимом работы объекта. Насос ЭГС приводится во вращение от маршевого двигателя шасси через коробку отбора мощности, при этом подключение насоса производится оператором после прибытия на заданную позицию. Для работы ЭГС необходима работа маршевого двигателя. При длительной работе вырабатывается ресурс двигателя и насоса ЭГС, а также увеличивается расход топлива, что является недостатком прототипа. Кроме того, наличие постоянно работающего маршевого двигателя объекта в совокупности с достаточно мощным насосом ЭГС является дополнительным источником шума и тепловыделения, что также является недостатком.
Целью заявляемого изобретения является повышение надежности ЭГС, оптимизация ее режимов работы и снижение тепловыделения.
Указанная цель достигается тем, что в ЭГС, содержащую гидробак, регулируемый насос с регулятором давления, электрогидравлический привод, который включает в себя пропорциональный гидрораспределитель, пульт управления, сумматор, широтно-импульсный модулятор, дифференцирующее звено, датчик относительного положения, установленный на объекте управления, датчик положения золотника пропорционального гидрораспределителя, гидрозамок, исполнительный гидродвигатель, кинематически соединенный с объектом управления, введены вспомогательный регулируемый насос, устройство управления, электроуправляемый релейный гидрораспределитель, датчик давления, блок тепловой защиты, датчик положения люльки, электрогидравлический регулятор положения люльки, обратные клапана, причем напорные магистрали регулируемого и вспомогательного регулируемого насосов через обратные клапаны соединены с гидравлическим входом пропорционального гидрораспределителя, с гидравлическим входом датчика давления и гидравлическим входом электроуправляемого релейного гидрораспределителя, выход релейного электроуправляемого гидрораспределителя соединен с гидробаком, выход пульта управления соединен с первым входом блока тепловой защиты и входом устройства управления, выход устройства управления соединен с управляющим входом электроуправляемого релейного гидрораспределителя, второй вход блока тепловой защиты электродвигателя соединен с выходом датчика положения люльки, третий вход блока тепловой защиты электродвигателя соединен с выходом датчика давления, выход блока тепловой защиты электродвигателя соединен с входом электрогидравлического регулятора положения люльки.
При этом блок тепловой защиты содержит последовательно соединенные умножитель, звено тепловой модели электродвигателя, звено с зоной нечувствительности, а также суммирующее звено, причем инвертирующий вход суммирующего звена соединен с выходом звена с зоной нечувствительности, первый неинвертирующий вход суммирующего звена является первым входом блока тепловой защиты, выход суммирующего звена является выходом блока тепловой защиты, первый вход умножителя является вторым входом блока тепловой защиты, второй вход умножителя является третьим входом блока тепловой защиты.
Материалы заявки поясняются графическими материалами:
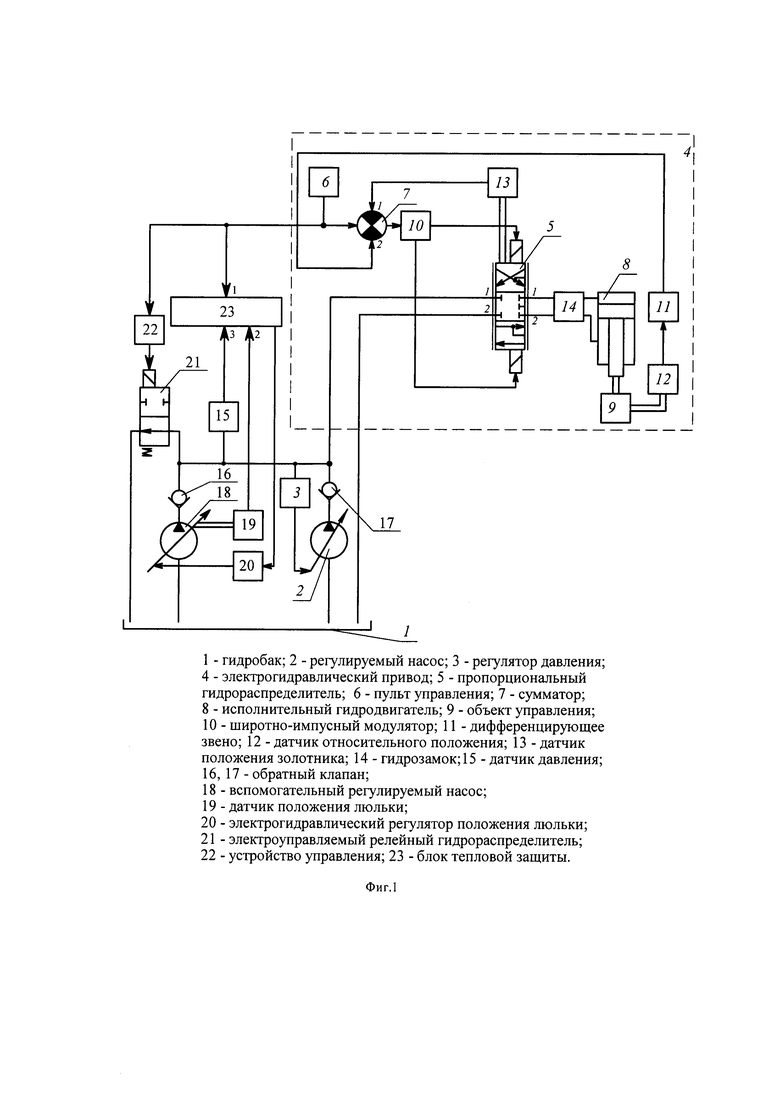
- на фиг. 1 представлена структурно-функциональная схема заявляемой системы;
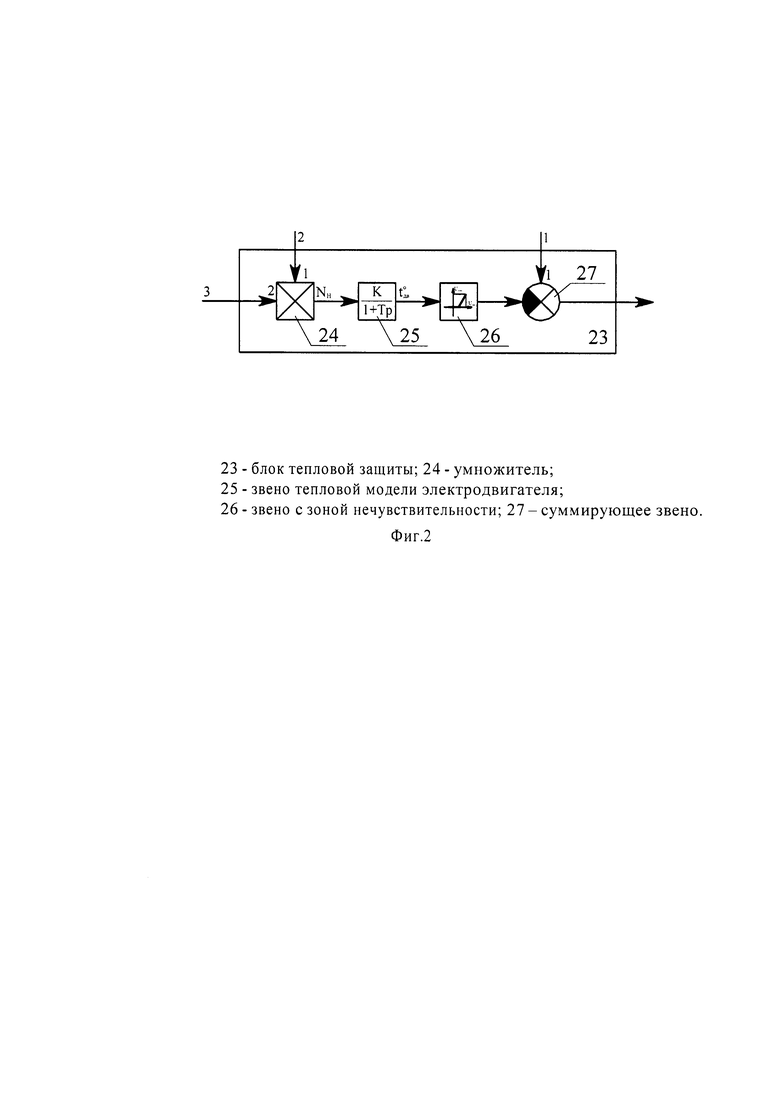
- на фиг. 2 представлена структурно-функциональная схема блока тепловой защиты.
Электрогидравлическая система (фиг. 1) содержит гидробак 1, регулируемый насос 2 с регулятором давления 3, электрогидравлический привод 4, содержащий пропорциональный гидрораспределитель 5, пульт управления 6, сумматор 7, исполнительный гидродвигатель 8, кинематически соединенный с объектом управления 9, а гидравлически соединенный с выходами пропорционального гидрораспределителя 5 через гидрозамок 14, широтно-импульсный модулятор 10, дифференцирующее звено 11, датчик относительного положения 12, датчик положения золотника 13, а также датчик давления 15, два обратных клапана 16 и 17, вспомогательный регулируемый насос 18 с датчиком положения люльки 19 и электрогидравлическим регулятором положения люльки 20, электроуправляемый релейный гидрораспределитель 21, устройство управления 22, блок тепловой защиты 23, причем всасывающие полости регулируемого насоса 2 и вспомогательного регулируемого насоса 18, и сливная магистраль пропорционального гидрораспределителя 5 соединены с гидробаком 1, напорные магистрали регулируемого насоса 2 и вспомогательного регулируемого насоса 18 через обратные клапаны 16 и 17 соединены с гидравлическим входом пропорционального гидрораспределителя 5, с гидравлическим входом регулятора давления 3, с гидравлическим входом датчика давления 15 и гидравлическим входом электроуправляемого релейного гидрораспределителя 21, выход которого соединен с гидробаком 1, выход пульта управления 6 соединен с неинвертирующим входом сумматора 7, с первым входом блока тепловой защиты 23 и входом устройства управления 22, выход устройства управления 22 соединен с управляющим входом электроуправляемого релейного гидрораспределителя 21, второй вход блока тепловой защиты 23 соединен с выходом датчика положения люльки 19, третий вход блока тепловой защиты 23 соединен с выходом датчика давления 15, выход блока тепловой защиты 23 соединен со входом электрогидравлического регулятора положения люльки 20, датчик относительного положения 12 кинематически связан с объектом управления 9, выход датчика относительного положения 12 соединен со входом дифференцирующего звена 11, выход дифференцирующего звена 11 соединен со вторым инвертирующим входом сумматора 7, первый инвертирующий вход сумматора 7 соединен с выходом датчика положения золотника 13, кинематически связанного с золотником пропорционального гидрораспределителя 5, выход сумматора 7 соединен со входом широтно-импульсного модулятора 10, выходы широтно-импульсного модулятора 10 соединены с управляющими входами пропорционального гидрораспределителя 5.
При этом блок тепловой защиты 23 (фиг. 2) содержит последовательно соединенные умножитель 24, звено тепловой модели электродвигателя 25, звено с зоной нечувствительности 26, а также суммирующее звено 27, причем инвертирующий вход суммирующего звена 27 соединен с выходом звена с зоной нечувствительности 26, первый неинвертирующий вход суммирующего звена 27 является первым входом блока тепловой защиты 23, выход суммирующего звена 27 является выходом блока тепловой защиты 23, первый вход умножителя 24 является вторым входом блока тепловой защиты 23, второй вход умножителя 23 является третьим входом блока тепловой защиты 23.
ЭГС работает в нескольких режимах. Основной режим - режим наведения. По прибытии на заданную позицию оператор БМ включает регулируемый насос 2 (фиг. 1), обеспечивающий высокую производительность и быстрое наведение пакета направляющих на заданные координаты. Наведение осуществляется по сигналам от пульта управления 6, при появлении на входе устройства управления 22 сигналов управления на его выходе формируется релейный сигнал, который поступает на управляющий вход электроуправляемого релейного гидрораспределителя 22, электроуправляемый релейный гидрораспределитель 22 переводится в закрытое положение и рабочая жидкость с выхода регулируемого насоса 2 через обратный клапан 17 поступает на гидравлический вход пропорционального гидрораспределителя 5, на вход датчика давления 15, на вход регулятора давления 3 и на вход электроуправляемого релейного гидрораспределителя 21. Сигнал управления с пульта управления 6 поступает на вход сумматора 7, затем на вход широтно-импульсного модулятора 10, в котором в соответствии с величиной и фазой сигнала управления поступает на один из управляющих входов пропорционального гидрораспределителя 5, отклоняя его золотник в соответствии с величиной и фазой сигнала управления, при этом на выходе пропорционального гидрораспределителя 5 формируется заданный поток рабочей жидкости, который через гидрозамок 14 поступает в исполнительный гидродвигатель 8, задавая скорость перемещения выходного органа исполнительного гидродвигателя 8 и соответственно объекта управления 9. По окончании наведения на заданные координаты возможен пуск снарядов и быстрая смена позиции, либо режим ожидания и перенаведения по результатам корректировки координат цели.
В случае получения команды на работу с управляемыми снарядами и корректировкой координат цели оператор отключает регулируемый насос 2 и производит включение вспомогательного регулируемого насоса 18.
При отсутствии сигналов управления от пульта управления 6 электроуправляемый релейный гидрораспределитель 21 находится в открытом состоянии и остаточный поток рабочей жидкости вспомогательного регулируемого насоса 18 через электроуправляемый релейный гидрораспределитель 21 поступает в гидробак 1, при этом потребляемая мощность вспомогательного регулируемого насоса 18 минимальна. При появлении управляющих сигналов от пульта управления 6 процесс наведения пакета направляющих при работе от вспомогательного регулируемого насоса 18 аналогичен описанному выше режиму наведения от регулируемого насоса 2, только поток рабочей жидкости с выхода вспомогательного регулируемого насоса 18 поступает в систему через обратный клапан 16.
Кроме того, поток рабочей жидкости, сформированный по сигналу от пульта управления 6, ограничивается блоком тепловой защиты 23 в зависимости от сигналов поступающих на первый, второй и третий входы блока тепловой защиты 23. Сигнал управления с пульта управления 6 поступает на первый вход блока тепловой защиты 23 и далее на неинвертирующий вход суммирующего звена 27 (фиг. 2), с выхода которого поступает на вход электрогидравлического регулятора положения люльки 20 (фиг. 1), при этом люлька вспомогательного регулируемого насоса 18 отклоняется на угол, соответствующий сигналу управления. На второй вход блока тепловой защиты 23 поступает сигнал датчика положения люльки 19, на третий вход блока тепловой защиты 23 поступает сигнал датчика давления 15, в блоке тепловой защиты 23 эти сигналы поступают на первый и второй входы умножителя 24 (фиг. 2).
Как известно, гидравлическая мощность насоса определяется, как произведение давления на расход рабочей жидкости, фактически эта же мощность с учетом КПД может быть использована для определения теплового состояния электродвигателя по его тепловой модели. Давление на выходе вспомогательного регулируемого насоса 18 (фиг. 1) определяется по датчику давления 15, расход вспомогательного регулируемого насоса 18 определяется исходя из текущего рабочего объема насоса, определяемого по датчику положения люльки 19 с учетом известной скорости вращения приводного вала вспомогательного регулируемого насоса 18.
С выхода умножителя 24 (фиг. 2) сигнал, имитирующий развиваемую мощность вспомогательного регулируемого насоса 18, поступает на вход звена тепловой модели электродвигателя 25, которая в первом приближении может быть представлена в виде апериодического звена с постоянной времени, равной тепловой постоянной электродвигателя. С выхода звена тепловой модели электродвигателя 25 сигнал, имитирующий температуру электродвигателя, поступает на звено с зоной нечувствительности 26. При превышении уровня сигнала на выходе звена тепловой модели электродвигателя 25 более величины зоны нечувствительности звена с зоной нечувствительности 26, то есть при достижении определенной температуры электродвигателя, с выхода звена с зоной нечувствительности 26 будет поступать дополнительный сигнал на инвертирующий вход суммирующего звена 27, уменьшая тем самым сигнал управления вспомогательным регулируемым насосом 18 (фиг. 1) на выходе блока тепловой защиты 23, поступающий на электрогидравлический регулятор положения люльки 20, и соответственно ограничивающий расход вспомогательного регулируемого насоса 18, тем самым предотвращающий перегрев за счет снижения потребляемой мощности.
Блок тепловой защиты 23 может быть выполнен в микропроцессорном варианте (АЦП, вычислитель, ЦАП, и программный алгоритм, в котором реализованы звено тепловой защиты, звено с зоной нечувствительности, умножитель, суммирующее звено и коэффициенты сопряжения уровней сигналов датчика давления, датчика положения люльки и сигналов устройства управления).
С учетом изложенного, построение ЭГС с наличием блока тепловой защиты по приведенной выше структуре позволяет производить форсированные режимы наведения без перегрева и обеспечивает снижение потребляемой мощности в режимах ожидания.
Еще один режим работы ЭГС, который целесообразно проводить от вспомогательного регулируемого насоса 18 - режим заряжания БМ. В этом режиме производится поочередное согласование всех направляющих БМ с лотком досылателя транспортно-заряжающей машины при загрузке и разгрузке БМ. Полная загрузка БМ занимает длительный промежуток времени, при котором только 10% времени занимает наведение на линию заряжания, остальное время вспомогательный регулируемый насос 18 работает в режиме, при котором электроуправляемый релейный гидрораспределитель 21 находится в открытом состоянии и вспомогательный регулируемый насос 18 работает в разгруженном режиме.
Таким образом, заявляемое техническое решение по оптимизации режимов работы за счет использования тепловой модели электродвигателя и шунтирования нагнетающей магистрали насосов позволяет повысить надежность электрогидравлической системы и обеспечить благоприятный тепловой режим работы без применения дополнительных систем охлаждения.
Данная система реализована в БМ 9А54-1 при модернизации привода 9П616 БМ 9А54.
| название | год | авторы | номер документа |
|---|---|---|---|
| Электрогидравлическая система управления | 2018 |
|
RU2708477C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ | 2007 |
|
RU2347950C1 |
| Электрогидравлическая система управления | 2018 |
|
RU2708004C1 |
| СИСТЕМА СТАБИЛИЗАЦИИ ПАКЕТА НАПРАВЛЯЮЩИХ БОЕВОЙ МАШИНЫ РЕАКТИВНОЙ СИСТЕМЫ ЗАЛПОВОГО ОГНЯ | 2011 |
|
RU2503908C2 |
| Система наведения и стабилизации пакета направляющих боевой машины реактивной системы залпового огня | 2017 |
|
RU2669903C1 |
| Электрогидравлическая система управления | 2016 |
|
RU2641192C1 |
| Система наведения и стабилизации пакета направляющих боевой машины реактивной системы залпового огня | 2017 |
|
RU2681913C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ | 2004 |
|
RU2272181C1 |
| СИСТЕМА СТАБИЛИЗАЦИИ ПАКЕТА НАПРАВЛЯЮЩИХ БОЕВОЙ МАШИНЫ РЕАКТИВНОЙ СИСТЕМЫ ЗАЛПОВОГО ОГНЯ | 2009 |
|
RU2387943C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ ПОВОРОТНЫМ КОЛЬЦОМ СТАРТОВОГО РАКЕТНОГО КОМПЛЕКСА | 2017 |
|
RU2748156C1 |
Изобретение относится к системам автоматического управления, конкретнее к приводам наведения вооружением боевых машин. Технический результат заключается в повышении надежности системы за счет оптимизации режимов работы и снижения тепловыделения. Указанная цель достигается введением в известную электрогидравлическую систему управления вспомогательного регулируемого насоса, устройства управления, электроуправляемого релейного гидрораспределителя, датчика давления, блока тепловой защиты, датчика положения люльки, электрогидравлического регулятора положения люльки, двух обратных клапанов. 1 з.п. ф-лы, 2 ил.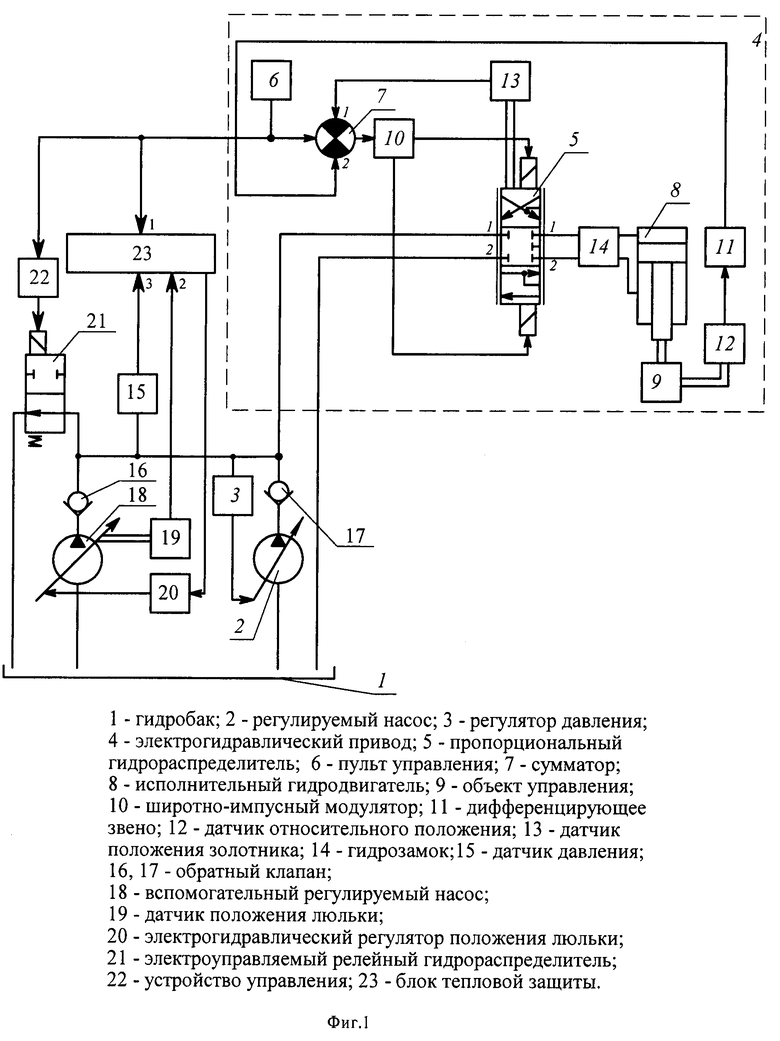
1. Электрогидравлическая система, содержащая гидробак, регулируемый насос с регулятором давления, электрогидравлический привод, который включает в себя пропорциональный гидрораспределитель, пульт управления, сумматор, широтно-импульсный модулятор, дифференцирующее звено, датчик относительного положения, установленный на объекте управления, датчик положения золотника пропорционального гидрораспределителя, гидрозамок, исполнительный гидродвигатель, кинематически соединенный с объектом управления, всасывающая полость регулируемого насоса и второй вход пропорционального гидрораспределителя соединены с гидробаком, выход пульта управления соединен с неинвертирующим входом сумматора, первый инвертирующий вход которого соединен с выходом датчика положения золотника пропорционального гидрораспределителя, а выход датчика относительного положения объекта управления через дифференцирующее звено соединен со вторым инвертирующим входом сумматора, выход которого соединен с входом широтно-импульсного модулятора, выходы которого соединены с управляющими входами пропорционального гидрораспределителя, первый вход пропорционального гидрораспределителя соединен с напорной магистралью регулируемого насоса, первый и второй выходы пропорционального гидрораспределителя гидравлически соединены через гидрозамок с входами исполнительного гидродвигателя, отличающаяся тем, что в электрогидравлическую систему введены вспомогательный регулируемый насос, устройство управления, электроуправляемый релейный гидрораспределитель, датчик давления, блок тепловой защиты, датчик положения люльки, электрогидравлический регулятор положения люльки, два обратных клапана, причем напорные магистрали регулируемого и вспомогательного регулируемого насосов через обратные клапаны соединены с гидравлическим входом пропорционального гидрораспределителя, гидравлическим входом датчика давления, гидравлическим входом регулятора давления и гидравлическим входом электроуправляемого релейного гидрораспределителя, выход релейного электроуправляемого гидрораспределителя и всасывающая полость вспомогательного регулируемого насоса соединены с гидробаком, выход пульта управления соединен с первым входом блока тепловой защиты и входом устройства управления, выход устройства управления соединен с управляющим входом электроуправляемого релейного гидрораспределителя, второй вход блока тепловой защиты электродвигателя соединен с выходом датчика положения люльки, третий вход блока тепловой защиты электродвигателя соединен с выходом датчика давления, выход блока тепловой защиты электродвигателя соединен с входом электрогидравлического регулятора положения люльки.
2. Электрогидравлическая система по п. 1, отличающаяся тем, что блок тепловой защиты содержит последовательно соединенные умножитель, звено тепловой модели электродвигателя, звено с зоной нечувствительности, а также суммирующее звено, причем инвертирующий вход суммирующего звена является выходом звена с зоной нечувствительности, первый неинвертирующий вход суммирующего звена является первым входом блока тепловой защиты, выход суммирующего звена является выходом блока тепловой защиты, первый вход умножителя является вторым входом блока тепловой защиты, второй вход умножителя является третьим входом блока тепловой защиты.
| ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ | 2007 |
|
RU2347950C1 |
| Электрогидравлическая система управления | 2016 |
|
RU2641192C1 |
| Электрогидравлическая система управления | 2018 |
|
RU2708004C1 |
| DE 10319484 B4, 03.07.2008 | |||
| US 20150075148 A1, 19.03.2015. | |||
