Изобретение относится к сельскому хозяйству, в частности к способам обработки почвы вокруг деревьев и кустарников в садовых насаждениях.
Известен садовый гербицидный опрыскиватель (http://www.agroserver.ru/b/sadovye-navesnye-gerbitsidnye-opryskivateli-zubr-nsh-g-ds-2-457063.htm), у которого имеется рама, бак и боковые штанги с распылителями.
Наиболее близким по технической сущности к заявленному автоматизированному устройству для гидравлического удаления сорной растительности, является прицепная машина для гидравлического удаления сорной растительности с помощью струй воды высокого давления (http://www.caffini.com/en/products/boom-sprayers/grass-killer), состоящая из рамы, колес, бака для рабочей жидкости, насоса, регулятора давления, фильтров, отклоняющей штанги, привода вала отбора мощности (ВОМ), головки распылителя с защитным кожухом и форсунками.
Недостатком известных прицепных машин является то, что они предназначены для удаления сорной растительности и рыхления почвы только на установленном режиме работы, не имеют возможности автоматического изменения давления подачи рабочей жидкости в зависимости от степени засорённости почвы сорной растительностью и комковатости почвы, а также копирования рельефа почвы.
Технической задачей предлагаемого изобретения, является повышение качества, эффективности и экологической безопасности процесса удаления сорной растительности в садовых насаждениях, а также снижение энергозатрат на проведение технологической операции.
Поставленная техническая задача достигается тем, что автоматизированное устройство для гидравлического удаления сорной растительности, включающее раму, колеса, бак для рабочей жидкости, насос, регулятор давления, фильтр, отклоняющуюся штангу, привод вала отбора мощности, головку распылителя с защитным кожухом и форсунки снабжено закрепленными на головке распылителя микроконтроллером, ультразвуковым датчиком и датчиками контроля сорной растительности и комковатости почвы, а отклоняющая штанга снабжена актуаторами.
Изобретение поясняется чертежами.
На фиг. 1 схематично представлено автоматизированное устройство для удаления сорной растительности; на фиг. 2 – отклоняющаяся штанга с головкой распылителя.
Устройство для гидравлического удаления сорной растительности с помощью струй воды высокого давления состоит из рамы 1, колес 2, бака 3 для рабочей жидкости, насоса, регулятора давления и фильтра (на фиг. не показано), отклоняющейся штанги 4 с актуаторами 5, привода вала отбора мощности (ВОМ) 6, головки распылителя 7 с защитным кожухом 8 и форсунками 9. С помощью актуаторов 5 по показаниям ультразвукового датчика 10 поддерживается требуемый угол наклона и заданное расстояние между сорной растительностью и головкой распылителя 7. Микроконтроллер 11, обработав информацию от датчиков контроля сорной растительности 12 и комковатости почвы 13, подает управляющий сигнал на насос на установку требуемого давления подачи рабочей жидкости.
Устройство работает следующим образом.
Тяговая машина в агрегате с автоматизированным устройством для гидравлического удаления сорной растительности (мобильный агрегат) заезжает в рядки садовых насаждений и, двигаясь с постоянной скоростью, обрабатывает приствольные зоны растений с помощью струй воды высокого давления. Копирование рельефа почвы происходит в автоматическом режиме с помощью актуаторов 5 путем изменения горизонтального и вертикального угла наклона головки распылителя 7 по сигналу от ультразвукового датчика 10 и микроконтрорллера 11, закреплённых на кожухе 8 головки распылителя 7.
Продолжая движение, мобильный агрегат обрабатывает приствольные зоны рабочей жидкостью (водой) под высоким давлением. Требуемое давление подачи форсунками 9 рабочей жидкости в зависимости от комковатости почвы и степени засоренности почвы сорной растительностью устанавливается автоматически по сигналам от микроконтроллера 11 на насос в зависимости от показаний датчиков комковатости почвы 13 и степени её засоренности сорной растительностью 12. Если в рядке отсутствует сорная растительность, то по сигналам от контроллера 11 подача воды прекращается и возобновляется только там, где есть сорная растительность. Питание микроконтроллера 11 с датчиками 10, 12 и 13 осуществляется от бортовой сети мобильного агрегата.
При необходимости оператор имеет возможность подкорректировать работу устройства из кабины трактора, с помощью пульта дистанционного управления, увеличивая или снижая давление подачи рабочей жидкости.
Повышение качества и эффективности процесса удаления сорной растительности и рыхления почвы достигается за счет возможности автоматического копирования рельефа почвы (горизонтального и вертикального отклонения штанги с головкой распылителя) с помощью актуаторов и регулировки давления распыла рабочей жидкости форсунками в зависимости от показаний датчиков о степени комковатости почвы и степени её засоренности сорной растительностью по сигналу от микроконтроллера. С помощью актуаторов в зависимости от показаний датчиков по сигналу от микроконтроллера автоматически поддерживается угол наклона и заданное расстояние между почвой с сорной растительностью и головкой распылителя.
Повышение экологической безопасности выполнения технологической операции удаления сорной растительности достигается за счет использования в качестве рабочей жидкости струй воды высокого давления.
Снижение энергозатрат достигается за счет возможности контроля дозы подачи рабочей жидкости в зависимости от степени засоренности почвы сорной растительностью и её комковатости.
Применение устройства для гидравлического удаления сорной растительности позволит повысить качество, эффективность, экологическую безопасность удаления сорной растительности, а также снизить энергозатраты на проведение технологической операции на 15-25%.
| название | год | авторы | номер документа |
|---|---|---|---|
| Робот-опрыскиватель для садоводства | 2022 |
|
RU2790688C1 |
| Устройство для внесения гербицидов в приствольную зону плодового сада | 2016 |
|
RU2636400C1 |
| Мобильный робот для контактного нанесения пестицидов | 2023 |
|
RU2797047C1 |
| Мобильный робот-опрыскиватель плодовых деревьев и кустарников | 2022 |
|
RU2794786C1 |
| Беспилотный летательный аппарат для внесения пестицидов в точном садоводстве | 2023 |
|
RU2793020C1 |
| Беспилотный летательный аппарат для внесения пестицидов в промышленном садоводстве и питомниководстве | 2023 |
|
RU2808008C1 |
| АВТОЖИР ДЛЯ ДИФФЕРЕНЦИРОВАННОГО ВНЕСЕНИЯ ЖИДКИХ СРЕДСТВ ХИМИЗАЦИИ | 2014 |
|
RU2589801C1 |
| Беспилотный летательный аппарат для внесения пестицидов в промышленном садоводстве и питомниководстве | 2023 |
|
RU2811604C1 |
| Беспилотный привязной авиационный комплекс для внесения пестицидов и агрохимикатов в точном земледелии | 2020 |
|
RU2769411C1 |
| Беспилотный вертолет для внесения пестицидов, удобрений и других агрохимикатов в точном земледелии | 2021 |
|
RU2754790C1 |

Изобретение относится к области сельскохозяйственного машиностроения. Автоматизированное устройство для гидравлического удаления сорной растительности содержит раму (1), колеса (2), бак (3) для рабочей жидкости, насос, регулятор давления, фильтр, отклоняющуюся штангу (4) с актуаторами, привод вала отбора мощности (6), головку распылителя с защитным кожухом и форсунки. На головке распылителя закреплены микроконтроллер, ультразвуковой датчик и датчики контроля сорной растительности и комковатости почвы. Обеспечивается повышение качества, эффективности и экологической безопасности процесса удаления сорной растительности в садовых насаждениях, снижение энергозатрат. 2 ил.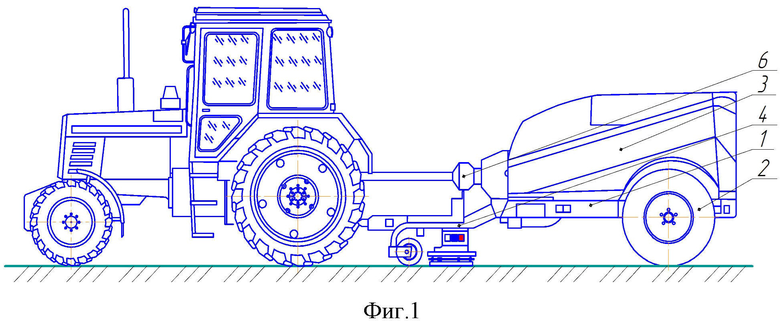
Автоматизированное устройство для гидравлического удаления сорной растительности, включающее раму, колеса, бак для рабочей жидкости, насос, регулятор давления, фильтр, отклоняющуюся штангу, привод вала отбора мощности, головку распылителя с защитным кожухом и форсунки, отличающееся тем, что оно снабжено закрепленными на головке распылителя микроконтроллером, ультразвуковым датчиком и датчиками контроля сорной растительности и комковатости почвы, а отклоняющаяся штанга снабжена актуаторами.
| Устройство для смачивания приствольных зон гербицидами | 1986 |
|
SU1358805A1 |
| Фрезерный культиватор для обработки почв в садах и виноградниках | 1987 |
|
SU1563603A1 |
| CN 104521931 A, 22.04.2015 | |||
| WO 9704879 A1, 13.02.1997 | |||
| US 6585056 B2, 01.07.2003. | |||

