Изобретение относится к сельскому хозяйству, в частности к мобильным сельскохозяйственным роботам-опрыскивателям для обработки плодовых деревьев и кустарников от вредителей и болезней рабочими растворами пестицидов в виде пенных структур.
Известен способ внесения пестицидов(патент KZA4 26988, МПК A01G 13/00, A01B 79/02, A01M 7/ 00, 2013), заключающийся в применении рабочих растворов химических препаратов в виде пенных структур с заданным процентным соотношением пестицида в растворе пенообразующего вещества, что обеспечивает высокую степень обработки пестицидами растений, равномерное распределений рабочего раствора по обрабатываемой площади, предотвращает снос препаратов за пределы обрабатываемых участков, снижает нормы внесения пестицидов при их высокой биологической и экономической эффективности, минимизирует вредное воздействие пестицидов на окружающую среду.
Известен пенный опрыскиватель для защищенного грунта, включающий резервуар с мешалкой, вертикальную штангу с распылителями, компрессор, шланги для подачи раствора и воздуха к барботеру, пены к распылителям (патент SU101285, МПК, А01М 7/00, 1983). Известный опрыскиватель не обеспечивает полную степень покрытия пеной абоксиальной и адаксиальной сторон листьев растений, что снижает качество опрыскивания и, как следствие, эффективное действие химических средств защиты растений.
Известен способ опрыскивания растений вентиляторными распылителями двумя боковыми нижними, верхними и одним верхними устройство для распыления инсектицидов, гербицидов, масел и жидких удобрений для садоводства и сельского хозяйства, содержащее мобильное энергетическое средство, бак для рабочей жидкости средств защиты растений и других агрохимикатов, гидравлический насос для подачи рабочей жидкости к устройству для распыления, электрически управляемый регулятор расхода, датчик расхода, регулятор давления, электронное средство управления работой оборудования, средство управления электрическим приводом цилиндров, датчик наклона и размера кроны дерева, горизонтальную штангу с направляющими и подвешенными на ней распылительными узлам, включающими по два вертикально ориентированных дугообразных рычага, образующих подковообразную форму и закрепленными на них боковыми верхними и нижними распылительными головками вентиляторного типа, а верхние концы рычагов соединены с механизмом поворота, соединенным в свою очередь с вертикальным и горизонтальным штоками управляющих цилиндров с электрическим управлением, связанными с электронным средством управления работой оборудования, при этом система распыления концептуально включает восемь независимых процессов, которые могут выполняются одновременно: управление оператором, управление расходом, положением вентилятора, управления расстоянием между рядами, управление двигателем вентилятора, управление штангой, управления распылением в рядах и мониторинг состояния процесса управления (патент EP 0783376, МПК : B05B 12/04, B05B 15/04, B05D 1/02, A01M 7/00, B05B 7/00 // B05B1/06, A01N3/00, 02.08.1996).
Недостатком известного опрыскивателя является высокая степень полидисперсности распыла рабочей жидкости и недостаточная равномерность покрытия всего объема крон деревьев и кустарников, стекание крупных капель на почву и снос мелких из зоны обработки, что вызывает снижение эффективности опрыскивания, потери пестицидов при обработке крон и, как следствие, загрязнение окружающей среды пестицидами выше предельно допустимых концентраций.
Известен генератор высокократной воздушно-механической пены, содержащий корпус с диффузором, пакет сеток, отражательное кольцо, установленное на внутренней поверхности диффузора, гидромотор с полым валом и крыльчаткой, насаженной на вал, при этом центральный распылитель выполнен в виде стакана, в днище которого имеются два взаимно перпендикулярных щелевых отверстия и на стакане установлены боковые распылители, обеспечивающих реактивную силу струи для вращения вала и, соответственно, вращения крыльчатки.
Недостатком известного пеногенератора является большая полидисперсность диспергируемой пенообразующей жидкости и неравномерное распределение ее по площади пакета сеток как щелевыми, так и боковыми распылителями с отражательным кольцом, что снижает качество и эффективность пенообразования (А.С. СССР № 578071, МПК А62С 5/04, 1976).
Известна центробежно-струйная форсунка, содержащая корпус, завихрительную цилиндрическую камеру с сужающимся коническим отверстием, переходящим в цилиндрическое сопло, цилиндрическую завихривающую вставку с центральным цилиндрическим отверстием и периферийными наклонными каналами, подводящий штуцер, подпирающий вставку, причем периферийные каналы наклонены к продольной оси форсунки под углом, равным 5-30° и выполнены переменного сечения прямоугольной, или круглой, или овальной формы с площадью, уменьшающейся по ходу движения жидкости, а между цилиндрической вставкой и сужающимся коническим отверстием установлено дистанционное кольцо, которое с подводящим штуцером частично перекрывают поперечные сечения каналов соответственно на их входах и выходах, образуя свободные проходные сечения, при этом площадь свободного проходного сечения на входе каждого канала равна площади свободного проходного сечения на его выходе (Патент РФ №2144439, МПК В05В 1/34, F23D 11/04, 2000).
Недостатками известной форсунки является небольшой угол раскрытия струи 30°-80°, излишние гидравлические потери энергии из-за наличия местных сопротивлений виде острых кромок из-за несовершенства центрального канала и завихрительной камеры, низкое качество распыла жидкости, что снижает ее производительность и не обеспечивает равномерное распределение диспергируемых потоков по площади факела распыла.
Наиболее близким по технической сущности к заявляемому устройству является выбранный в качестве прототипа мобильный робот-опрыскиватель для обработки пестицидами пропашных овощных и низкорастущих ягодных культур, содержащий самодвижущееся четырехколесное шасси в виде горизонтальной рамы, заднюю и фронтальную вертикальные прямоугольные рамы с подвижными направляющими, заднюю и фронтальную горизонтальные штанги с механизмами подъема и опускания штанг, систему автономного электропитания в виде блока бортовых аккумуляторных батарей и панель солнечной батареи с множеством объединенных фотоэлементов, выполненную в виде половины поверхности сплюснутого сфероида вращения, систему управления и навигации в виде бортового компьютера, модуль интегрированной навигационной системы, блок управления электроприводами шасси, систему технического зрения, включающую установленные на фронтальной штанге трехмерный сканирующий лазерный оптический дальномер и цифровые оптико-электронные датчики, систему пенообразования и внесения пестицидов, включающую блок автоматического управления подачей, расходом и распределением рабочих растворов пестицидов и сжатого воздуха, связанный интерфейсом с центральным процессором бортового компьютера, гидравлические и пневматические коммуникации, соединенные с модулями пенообразования и внесения пестицидов, ультразвуковые датчики, бак и миксер для рабочих растворов пестицидов, насосный агрегат, источник сжатого воздуха с пневматическим оборудованием, модули пенообразования и внесения пестицидов (RU № 2731082, МПК A01M 7/00, A01C 23/00, A01B 69/00, G05D 1802, 2019).
Недостатком известного робота-опрыскивателя являются ограниченные технологические возможности вследствие обработки пестицидами только низкорастущих пропашных культур, излишние затраты энергии, связанные с подачей воздуха в пеногенераторы.
Технической задачей изобретения является повышение качества и эффективности обработки плодовых деревьев и кустарников рабочими растворами пестицидов в виде пенных структур, снижение норм внесения пестицидов, сведение к минимуму потерь пестицидов, уменьшение рисков загрязнения окружающей среды.
Поставленная техническая задача достигается тем, что у мобильного робота-опрыскивателя плодовых деревьев и кустарников, содержащего включающее платформу с передними направляющими и задними ведущими колесами с приводом от электромоторов, систему электропитания, включающую блоки аккумуляторных батарей и панель солнечной батареи, систему управления и навигации, включающую бортовой компьютер, блок управления электроприводами шасси, модуль интегрированной навигационной системы, систему технического зрения в виде лазерного оптического дальномера и ультразвуковых датчиков, систему размещения, подачи и распределения рабочих жидкостей пестицидов, систему генерирования пены, включающую штанговый модуль с установленными на платформе неподвижной и подвижной вертикальными рамами, симметричные горизонтальные консольно-поворотные фермы с направляющими и с установленными на них модулями генерирования пены, согласно изобретению, подвесные вертикальные штанги каждого модуля генерирования выполнены в виде дуги окружности, ограниченной точками пересечения хорды с окружностью, длина хорды, по крайней мере, больше высоты кроны обрабатываемого дерева, на каждой из вертикальных штанг установлены блоки генерирования воздушно-механической пены, при этом пеногенераторы блоков генерирования пены снабжены электроприводными устройствами перемещения пеногенераторов вдоль штанг, средняя часть диффузоров каждого из которых выполнена в виде гофрированного отражательного кольца, в центральном распылителе пеногенератора установлена центробежно-струйная форсунка с осью симметрии, совпадающей с осью симметрии пеногенератора, причем центральный канал винтового вкладыша форсунки выполнен в виде коноидального насадка, переходящего в цилиндрическое сопло, диаметр которого, по крайней мере, вдвое меньше диаметра выходного сопла центробежно-струйной форсунки, а камера завихрения выполнена в виде половины вытянутого сфероида с главной осью, совпадающей с осью симметрии центробежно-струйной форсунки.
Изобретение поясняется чертежами.
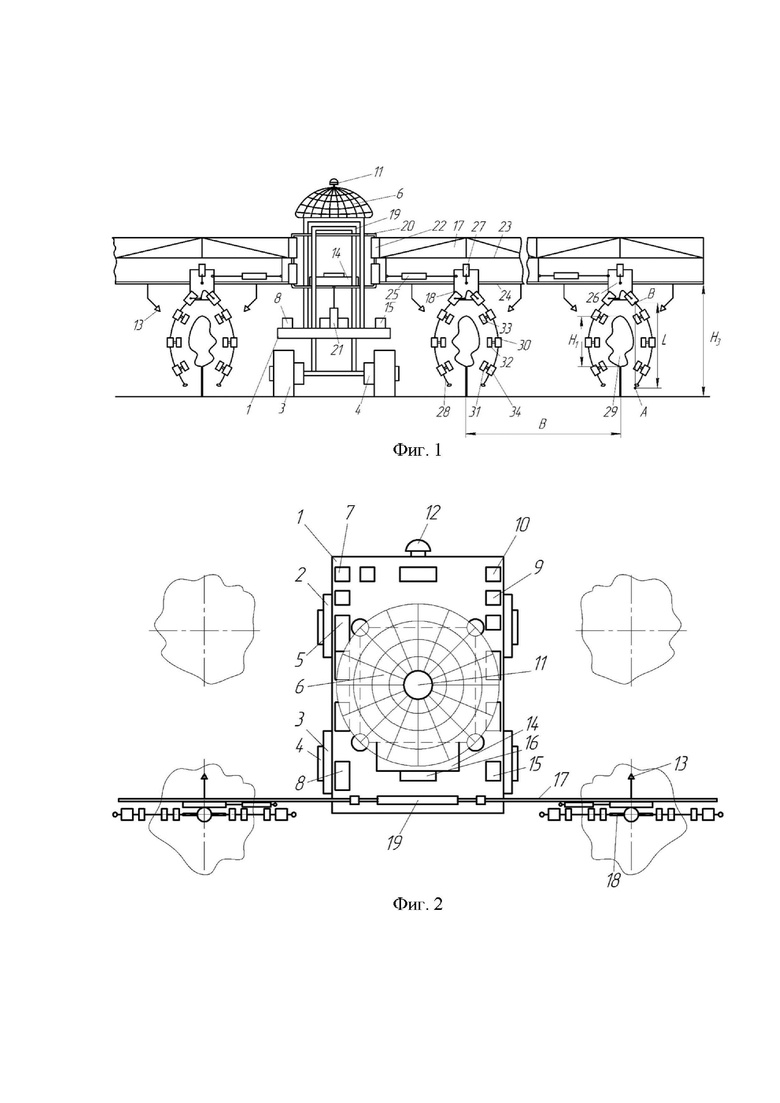
На фиг. 1 представлен мобильный робот-опрыскиватель, вид сзади; на фиг. 2 - то же, вид сверху; на фиг. 3 представлен генератор воздушно-механической пены в продольном разрезе; на фиг. 4 представлена форсунка центрального распылителя в продольном разрезе.
Мобильный робот-опрыскиватель плодовых деревьев и кустарников содержит самоходное шасси, систему электропитания, систему управления и навигации, систему технического зрения, систему размещения, подачи, распределения потоков рабочей жидкости - пенообразующих растворов пестицидов, систему генерирования пены.
Самоходное шасси имеет платформу 1, установленную на раме, с передними направляющими колесами 2 и задними ведущими колесами 3 с приводом от электромоторов 4.
Система электропитания содержит установленные на платформе 1 блоки аккумуляторных батарей 5, панель солнечной батареи 6 с множеством фотоэлементов для подзарядки аккумуляторных батарей 5.
Система управления и навигации содержит бортовой компьютер 7, блок управления 8 электроприводами шасси, интегрированную навигационную систему, включающую блок инерциальной системы 9, приемник 10 ГЛОНАСС с антенной 11, установленной сверху панели солнечной батареи 6.
Система технического зрения содержит лазерный оптический дальномер 12 для пространственной ориентации робота-опрыскивателя, ультразвуковые датчики 13 для определения геометрических размеров деревьев и кустарников, расстояния между деревьями и кустарниками. Компоненты системы технического зрения комплексированы с бортовым компьютером 7.
Система размещения, подачи, расхода и распределения рабочих растворов пестицидов содержит модуль размещения и подачи рабочих растворов, включающий бак 14 для рабочей жидкости - пенообразующего раствора пестицида (инсектицида или фунгицида), с электронным уровнемером, подсоединенные к баку 14 гидравлический насос 15, соединенный гидролинией с блоком 16 автоматического управления подачей, расходом и распределением потоков рабочей жидкости, к которому в свою очередь подсоединена система генерирования пены. Блок 16 и система генерирования пены связанны интерфейсом с центральным процессором бортового компьютера 7.
Система генерирования пены содержит штанговый модуль 17 и, установленные на нем, модули генерирования пены 18.
Штанговый модуль 17 содержит, установленную на платформе 1 вертикальную неподвижную П-образную раму 19, закрепленную в ее пазах вертикальную подвижную прямоугольную раму 20, связанную с вертикально установленным на платформе линейным актуатором 21 со встроенным контроллером, соединенные с рамой 20 посредством поворотных механизмов 22 с электроприводом симметричные относительно продольной оси X-X робота-опрыскивателя консольно-поворотные горизонтальные фермы 23 с подвесными горизонтальными направляющими 24, с установленными на них линейными актуаторами горизонтального перемещения 25.
Каждый модуль генерирования пены 18 содержит корпус 26, соединенный со штоком актуатора 25, обеспечивающего линейное перемещение корпуса 26 по направляющим 24. На корпусе 26 закреплен вертикальный линейный актуатор 27. Актуаторы 21, 25 и 27 снабжены программируемыми контроллерами, интегрируемыми в систему управления роботом-опрыскивателем. Линейные актуаторы 27 связаны системой рычагов с подвесными вертикальными штангами 28. Штанги 28 выполнены в виде дуги окружности, ограниченной точками A и B пересечения хорды A-B с окружностью, при этом длина L хорды А-В дуги окружности штанги 28, по крайней мере, больше высоты H1 кроны каждого обрабатываемого дерева 29.На штангах 28 установлены блоки генерирования пены 30, включающие нижние 31, средние 32 и верхние 33 пеногенераторы воздушно-механической пены, снабженные электроприводными устройствами 34 для перемещения пеногенераторов 31 вдоль штанг 28.
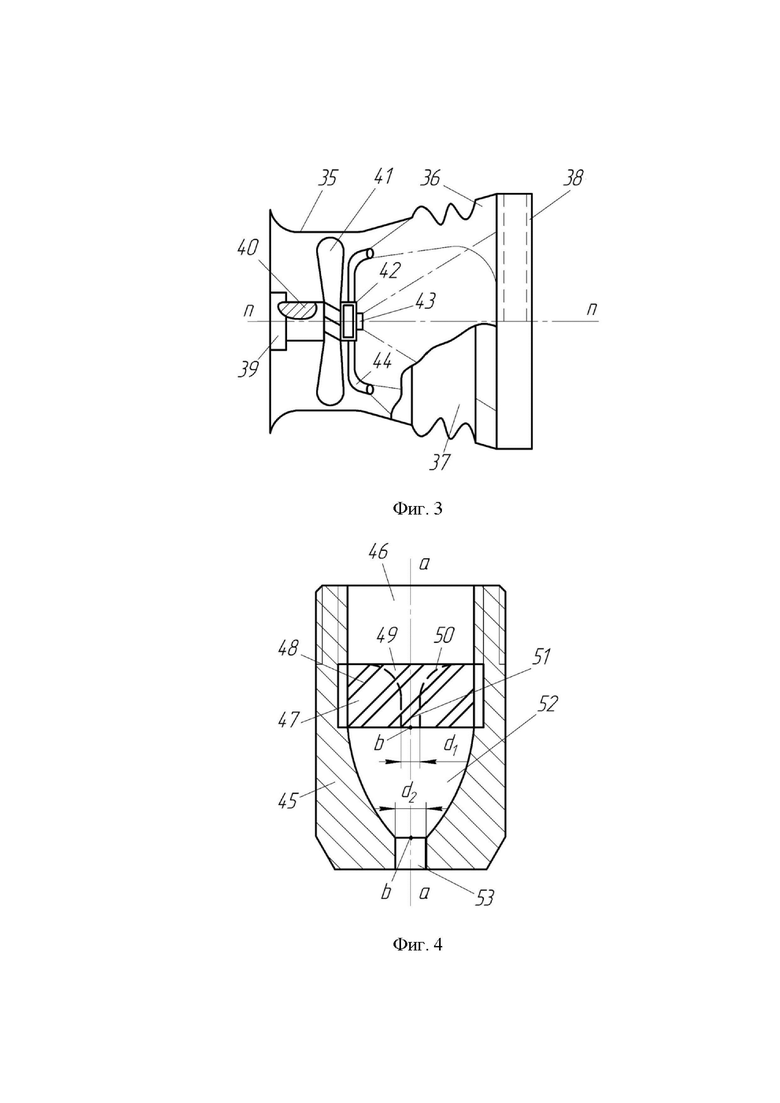
Каждый из пеногенераторов 31, 32, 33 содержит корпус 35, соединенный с корпусом диффузор 36 с врезанным в средней части диффузора 36 гофрированным отражательным кольцом 37, пенообразующий пакет сеток 38, установленный на выходе из диффузора 36, соединительную муфту 39 для подачи пенообразующего раствора, полый вал 40, крыльчатку 41, насаженную на вал 40, центральный распылитель 42, выполненный в виде горизонтального стакана, в дне которого установлена центробежно-струйная форсунка 43, с осью симметрии a-a, совпадающей с осью симметрии n-n пеногенератора, а по окружности боковой поверхности установлены боковые распылители 44 в виде Сегнерова колеса.
Центробежно-струйная форсунка 43 содержит корпус 45, приемную камеру 46, винтовой вкладыш 47 с периферийными наклонными пазами 48, центральный осевой канал 49 винтового вкладыша 47 с коноидальным входом 50, сопло 51 центрального канала 49 винтового вкладыша 47, выходное сопло 53 форсунки. Диаметр сопла 51 центрального канала 49 винтового вкладыша 47 по крайней мере наполовину меньше диаметра выходного сопла 53 центробежно-струйной форсунки 43. Камера завихрения 52 выполнена в виде половины вытянутого сфероида с главной осью b-b, совпадающей с осью симметрии форсунки a-a.
Выполнение штанг в виде дуг окружности, ограниченных точками пересечения хорды с окружностью, с длиной L хорды А-В дуги окружности штанги 28 не менее высоты кроны H1 обрабатываемого дерева 29 и установка на штангах 28 блоков генерирования пены 30, включающих пеногенераторы воздушно-механической пены 31, 32, 30, снабженные электроприводными устройствами 34 для перемещения пеногенераторов 31, 32, 33 вдоль штанг 28, позволяет точно позиционировать пеногенераторы 31, 32, 33 перед обрабатываемой кроной и обеспечивать качественное покрытий абаксиальной и адаксиальной сторон листьев всей обрабатываемой кроны деревьев и кустарников.
Выполнение отражательного кольца 37 в пеногенераторах гофрированным и являющимся частью корпуса диффузора 36, минимизирует диссипацию энергии струйных потоков жидкости при преобразовании кинетической энергии в потенциальную при взаимодействии с отражательным кольцом 37, что обеспечивает более равномерное орошение пакета сеток 38 в пеногенераторах 31, 32, 33.
Установка в центральном распылителе 42 каждого пеногененератора 31, 32, 33 центробежно-струйной форсунки 43 с осью симметрии a-a, совпадающей с осью симметрии n-n пеногенератора, позволяет получить круговой заполненный факел распыла пенообразующего раствора и обеспечить равномерное орошение пакета сеток 38.
Выполнение центрального канала 49 винтового вкладыша 47 центробежно-струйной форсунки 43 в виде коноидального насадка 50, переходящего в цилиндрическое сопло 51, позволяет сфокусировать поток жидкости, поступающий в канал 49, повысить коэффициент расхода, увеличить скорость истечения жидкости из сопла 51 центрального канала 49 винтового вкладыша 47. Выполнение диаметра сопла 51 центрального канала 49 винтового вкладыша 47, по крайней мере наполовину меньше диаметра выходного сопла 53 центробежно-струйной форсунки, обеспечивает плавное преобразование вращательного и струйного потоков в единый сплошной поток с наименьшей потерей энергии потоков при их соединении в сопле 53. Выполнение камеры завихрения 52 в виде половины вытянутого сфероида с главной осью, совпадающей с осью симметрии форсунки 43 обеспечит необходимый уровень завихрения закрученного потока и уменьшения излишнего гидравлического сопротивления потока при его входе в сопло 53. Такое выполнение конструкции форсунки 43 обеспечивает снижение затрат энергии на диспергирование жидкости, оптимальную турбулизацию потоков в камере завихрения, увеличение угла факела распыла в полтора-три раза, и, как следствие, повышение производительности и качества работы форсунки 43.
Робот-опрыскиватель для точного садоводства работает следующим образом.
Перед началом работы в бортовой компьютер 7 робота - опрыскивателя вводится электронная карта - задание на проведение технологического процесса обработки деревьев или кустарников пестицидами, длина квартала, ширина междурядий, расстояние между деревьями, высота обрабатываемых деревьев или кустарников и их координаты, диаметр крон, траектория движения с учетом поворотов и заходов на следующий гон, координаты реперных точек начала и конца обработки, координаты реперных точек разворотов на последующие гоны, координаты места заправки рабочей жидкостью, высота положения штангового модуля, расстояние от пеногенераторов до кроны деревьев, перепад рабочего давления на форсунке пеногенератора, рабочая скорость движения, норма расхода рабочей жидкости пестицида. В соответствии с электронной картой-заданием в бак 14 заливается рабочая жидкость- пенообразующий раствор пестицида с заданным процентным соотношение пестицида (инсектицида или фунгицида) в растворе пенообразующего вещества. По сигналу от компьютера 7 включается в работу система электропитания. Посредством солнечной батареи 6 происходит подзарядка блока аккумуляторных батарей 5. Электропитание подается к системе управления и навигации, системе технического зрения, системе размещения, подачи, расхода, распределения потоков рабочей жидкости пестицидов, системе генерирования пены. Включаются в работу система технического зрения и система управления и навигации. В соответствии с электронной картой - заданием и по данным координат, получаемых приемником 10 ГЛОНАСС, робот - опрыскиватель устанавливается на исходную реперную точку начала обработки. От бортового компьютера 7 по линии связи передается сигнал на электроприводы поворотных механизмов 22, на контроллеры линейных актуаторов 21, 25, 27. Посредством поворотных механизмов 22, горизонтальные фермы 23 штангового модуля 17 поворачиваются и занимают положение, перпендикулярное продольной оси X-X робота-опрыскивателя. Вертикальный линейный актуатор 21 поднимает подвижную раму 20 и соответственно модуль 17 на заданную рабочую высоту H3. Актуаторы 25 устанавливают модули генерирования пены 18 в соответствии с расстоянием B между рядами деревьев и кустарников. Актуаторы 27 устанавливают штанги 28 на заданный обхват крон деревьев 29 с учетом диаметров крон. Электроприводные устройства 34 перемещают пеногенераторы 31, 32, 33 вдоль штанг и устанавливают их в положение, обеспечивающее подачу пены на нижнюю, среднюю и верхнюю поверхности кроны дерева 29.
По сигналу от бортового компьютера 7 через блок управления электроприводами шасси 8 включаются приводные моторы 4. Робот-опрыскиватель начинает движение по маршруту, запрограммированному картой - заданием обработки квартала насаждений. Интегрированная навигационная система посредством приемника 10 ГЛОНАСС с антенной 11 принимает сигналы от глобальной спутниковой навигационной системы, вычисляет текущие значения координат местоположения робота-опрыскивателя с передачей значений его позиционирования в компьютер 7. Компьютер 7 управляет автономным движением робота - опрыскивателя в реальном масштабе времени. Посредством лазерного оптического дальномера 12 осуществляется наблюдение за пространством и обнаружение не запрограммированных препятствий перед роботом-опрыскивателем. Ультразвуковые датчики 13 определяют геометрические размеры и плотность кроны деревьев и кустарников, расстояния между деревьями и кустарниками в ряду. Одновременно включается в работу система подачи, распределения потоков рабочей жидкости - пенообразующего раствора пестицида, который под давлением подается из бака 14 насосом 15 через блок 16 к пеногенераторам 31, 32, 33. Поток пенообразующего раствора, проходя через отверстие вала 40 каждого из пеногенераторов 31, 32, 33, поступает в центральный распылитель 42 и далее одна часть каждого потока поступает в выходные сопла боковых распылителей 44, другая часть потока поступает в приемную камеру 46 форсунок 43. При выходе пенообразующего раствора из сопел распылителей 44 за счет реактивного действия вытекающих из сопел струй жидкости обеспечивается вращение вала 40 крыльчатки 41, механическая энергия от лопастей которой передается воздушной среде, заставляя ее перемещаться внутри корпуса 35 по диффузору 36. Струи жидкости, попадая на гофрированное отражательное кольцо 37, отражаются от него, деформируются в виде широкого факела распыла и направляются на пакет сеток 38. Одновременно поток пенообразующего раствора под давлением поступает в центробежно-струйную форсунку43.
Из приемной камеры 46 часть потока поступает в периферийные наклонные каналы 48 винтового вкладыша 47, посредством которого происходит закручивание жидкости в камере 52. Закрученный поток движется вдоль стенок камеры 52 и поступает в выходное сопло 53. Другая часть потока поступает в центральный осевой канал 49 и выходит из сопла 51 в виде цилиндрической струи, которая, проходя камеру 52, поступает в сопло 53. В выходном сопле 53 происходит сопряжение закрученного и струйного потоков. Жидкость выходит из сопла 53 в виде кругового сплошного факела распыла. Поток воздуха, создаваемый крыльчаткой 41, направляется к пакету сеток 38, при этом нагнетаемый поток воздуха дополнительно захватывается потоком распыленной пенообразующей жидкости. В результате взаимодействия распыленного пенообразующего раствора и воздуха на пенообразующем пакете сеток 38 образуется пена, представляющая собой дисперсную систему, состоящую из множества воздушных пузырьков, разделенных между собой тонкими жидкими перегородками, представляющими собой компоненты растворенного в водном растворе пенообразователя, включающего заданное количество действующего вещества пестицида (инсектицида или фунгицида). Потоки пены, выходящие из пеногенераторов 31, 32 и 33, полностью заполняют весь объем кроны и покрывают как абаксиальную, так и адаксиальную стороны листьев кроны.
Применение мобильного робота-опрыскивателя расширяет технологические возможности внесения пестицидов, обеспечивает повышение эффективности и качества обработки плодовых деревьев и кустарников пестицидами, снижение норм внесения пестицидов, исключает потери пестицидов и загрязнение ими окружающей среды.
| название | год | авторы | номер документа |
|---|---|---|---|
| Робот-опрыскиватель для садоводства | 2022 |
|
RU2790688C1 |
| Мобильный робот-опрыскиватель для обработки пестицидами пропашных овощных и низкорастущих ягодных культур | 2019 |
|
RU2731082C1 |
| Беспилотный летательный аппарат для внесения пестицидов в промышленном садоводстве и питомниководстве | 2023 |
|
RU2811604C1 |
| Беспилотный летательный аппарат для внесения пестицидов в промышленном садоводстве и питомниководстве | 2023 |
|
RU2808008C1 |
| Беспилотный летательный аппарат для внесения пестицидов в точном садоводстве | 2023 |
|
RU2793020C1 |
| Беспилотный летательный аппарат для обработки пестицидами садовых деревьев и кустарников | 2023 |
|
RU2808292C1 |
| Мобильный робот для контактного нанесения пестицидов | 2023 |
|
RU2797047C1 |
| Беспилотный летательный аппарат для обработки пестицидами пропашных культур | 2023 |
|
RU2808295C1 |
| Селекционный мотоблок-опрыскиватель | 2017 |
|
RU2644196C1 |
| Беспилотный вертолет для внесения пестицидов, удобрений и других агрохимикатов в точном земледелии | 2021 |
|
RU2754790C1 |
Изобретение относится к области сельского хозяйства. Мобильный робот-опрыскиватель содержит самоходное шасси, включающее платформу, установленную на раме, с передними направляющими и задними ведущими колесами с приводом от электромоторов, систему электропитания, включающую блоки аккумуляторных батарей и панель солнечной батареи, систему управления и навигации, включающую бортовой компьютер, блок управления электроприводами шасси, модуль интегрированной навигационной системы, систему технического зрения в виде лазерного оптического дальномера и ультразвуковых датчиков, систему размещения, подачи и распределения рабочих жидкостей пестицидов, систему генерирования пены, включающую штанговый модуль с установленными на платформе неподвижной и подвижной вертикальными рамами, симметричные горизонтальные консольно-поворотные фермы с направляющими и с установленными на них модулями генерирования пены. Подвесные вертикальные штанги каждого модуля генерирования выполнены в виде дуги окружности, ограниченной точками пересечения хорды с окружностью. Длина хорды, по крайней мере, больше высоты кроны обрабатываемого дерева. На каждой из вертикальных штанг установлены блоки генерирования воздушно-механической пены. Пеногенераторы блоков генерирования пены снабжены электроприводными устройствами перемещения пеногенераторов вдоль штанг, средняя часть диффузоров каждого из которых выполнена в виде гофрированного отражательного кольца. В центральном распылителе пеногенератора установлена центробежно-струйная форсунка с осью симметрии, совпадающей с осью симметрии пеногенератора. Центральный канал винтового вкладыша форсунки выполнен в виде коноидального насадка, переходящего в цилиндрическое сопло, диаметр которого, по крайней мере, вдвое меньше диаметра выходного сопла центробежно-струйной форсунки. Камера завихрения выполнена в виде половины вытянутого сфероида с главной осью, совпадающей с осью симметрии центробежно-струйной форсунки. Обеспечивается повышение эффективности и качества обработки плодовых деревьев и кустарников пестицидами, снижение норм внесения пестицидов, исключение потери пестицидов и загрязнение ими окружающей среды. 4 ил.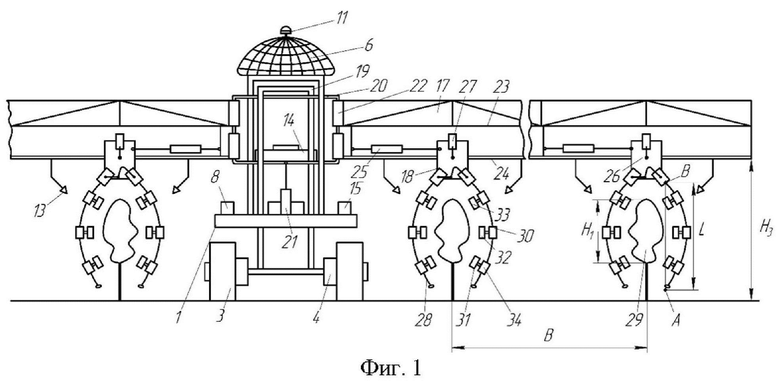
Мобильный робот-опрыскиватель плодовых деревьев и кустарников, содержащий самоходное шасси, включающее платформу, установленную на раме, с передними направляющими и задними ведущими колесами с приводом от электромоторов, систему электропитания, включающую блоки аккумуляторных батарей и панель солнечной батареи, систему управления и навигации, включающую бортовой компьютер, блок управления электроприводами шасси, модуль интегрированной навигационной системы, систему технического зрения в виде лазерного оптического дальномера и ультразвуковых датчиков, систему размещения, подачи и распределения рабочих жидкостей пестицидов, систему генерирования пены, включающую штанговый модуль с установленными на платформе неподвижной и подвижной вертикальными рамами, симметричные горизонтальные консольно-поворотные фермы с направляющими и с установленными на них модулями генерирования пены, отличающийся тем, что подвесные вертикальные штанги каждого модуля генерирования выполнены в виде дуги окружности, ограниченной точками пересечения хорды с окружностью, длина хорды, по крайней мере, больше высоты кроны обрабатываемого дерева, и на каждой из вертикальных штанг установлены блоки генерирования воздушно-механической пены, при этом пеногенераторы блоков генерирования пены снабжены электроприводными устройствами перемещения пеногенераторов вдоль штанг, средняя часть диффузоров каждого из которых выполнена в виде гофрированного отражательного кольца, в центральном распылителе пеногенератора установлена центробежно-струйная форсунка с осью симметрии, совпадающей с осью симметрии пеногенератора, причем центральный канал винтового вкладыша форсунки выполнен в виде коноидального насадка, переходящего в цилиндрическое сопло, диаметр которого, по крайней мере, вдвое меньше диаметра выходного сопла центробежно-струйной форсунки, а камера завихрения выполнена в виде половины вытянутого сфероида с главной осью, совпадающей с осью симметрии центробежно-струйной форсунки.
| Мобильный робот-опрыскиватель для обработки пестицидами пропашных овощных и низкорастущих ягодных культур | 2019 |
|
RU2731082C1 |
| Устройство для разгрузки балластных железнодорожных платформ | 1940 |
|
SU58856A1 |
| Способ приготовления лака | 1924 |
|
SU2011A1 |
| ГЛУШАНКОВ Р.Е | |||
| "УНИВЕРСАЛЬНЫЙ ОПРЫСКИВАТЕЛЬ ДЛЯ УХОДА ЗА РАСТЕНИЯМИ В ПЛОДОВОМ ПИТОМНИКЕ" // АВТОРЕФЕРАТ, МОСКВА, 2013. | |||

