Изобретение относится к медицинской системе.
В частности, изобретение относится к медицинской системе, предназначенной для проникновения в анатомическую структуру пациента, причем указанная анатомическая структура содержит ткани, обладающие разными способностями проводить электрический ток. Медицинская система содержит:
- корпус, выполненный с возможностью проникновения в анатомическую структуру, причем корпус имеет наружную поверхность,
- по меньшей мере один первый электрод, содержащий первую контактную поверхность, расположенную на наружной поверхности корпуса, для вхождения в контакт с тканями анатомической структуры,
- по меньшей мере один второй электрод, содержащий вторую контактную поверхность, расположенную на наружной поверхности корпуса, для вхождения в контакт с тканями анатомической структуры на расстоянии от первой контактной поверхности,
- электрический генератор, выполненный с возможностью подачи электрического тока между первой и второй контактными поверхностями,
- устройство обработки, выполненное с возможностью определять электрическую характеристику, отображающую способность ткани анатомической структуры проводить электрический ток между первой и второй контактными поверхностями, и с возможностью выдавать предупредительный сигнал, соответствующий определенной электрической характеристике, при этом предупредительный сигнал имеет по меньшей мере один параметр, меняющийся в зависимости от определенной электрической характеристики.
В патентной заявке WO 03/068076 описана медицинская система вышеупомянутого типа в виде хирургического инструмента, в которой предупредительный сигнал является прерывистым и имеет темп предупреждения, при котором участки предупреждения, воспринимаемые пользователем, передаются последовательно с интервалом времени между двумя последовательными участками предупреждения.
Этот хирургический инструмент, выпускаемый в продажу под названием PediGuard®, используют, в частности, в ортопедической хирургии для обеспечения надлежащего позиционирования педикулярных винтов в ножке позвонка пациента для крепления протеза или имплантата. Действительно, очень важно обеспечивать точное позиционирование педикулярных винтов в губчатой кости ножек позвонков, чтобы нормально закрепить протез или имплантат, избегая при этом повреждения или пробоя внутреннего слоя кортикальной кости, ограничивающего позвонковое отверстие, в котором проходит спинной мозг, или наружного слоя кортикальной кости, вблизи которого проходят корешки нервов. Изменения предупредительного сигнала дают информацию о тканях вблизи первой и второй контактных поверхностей, при этом кортикальная кость имеет меньшую электропроводность, чем губчатая кость, которая, в свою очередь, имеет меньшую электропроводность, чем текучие среды, такие как кровь, или чем мягкие ткани.
Хирургический инструмент является простым и интуитивным в применении и обеспечивает показательные коэффициенты успеха при установке педикулярных винтов.
Вместе с тем, в некоторых конкретных ситуациях, в частности, когда встречаемые ткани имеют многочисленные локальные неоднородности, чувствительность хирургического инструмента к сугубо точечным изменениям способности проводить электрический ток может привести к некоторым трудностям в интерпретации предупредительного сигнала. В частности, эти точечные изменения могут выражаться несвоевременными изменениями предупредительного сигнала, прерывающими ожидаемую врачом последовательность участков предупреждения и интервалов времени. Изменения способности проводить электрический ток, происходящие многократно за короткий интервал времени, могут также привести к появлению искажений в предупредительном сигнале, которые дают врачу непонятную или трудно интерпретируемую информацию.
В этих частных ситуациях нормальное использование хирургического инструмента может быть основано на опыте врача, позволяющем ему выделять информацию, которую он должен учитывать.
Изобретение призвано решить эту проблему за счет повышения надежности медицинской системы, независимо от ее использования.
В связи с этим изобретением предложена медицинская система вышеупомянутого типа, в которой устройство обработки выполнено с возможностью обнаруживать изменение электрической характеристики и изменять указанный по меньшей мере один переменный параметр предупредительного сигнала после истечения времени задержки, следующего за изменением электрической характеристики.
Таким образом, согласно изобретению, период, определяемый временем задержки, предшествует передаче предупредительного сигнала с параметром или параметрами, соответствующими определенной электрической характеристике. Таким образом, передача предупредительного сигнала с параметром или параметрами, соответствующими определенной электрической характеристике, происходит с запаздыванием относительно обнаружения изменения электрической характеристики. Время задержки позволяет ограничить или модулировать чувствительность медицинской системы к точечным изменениям способности встречаемых тканей проводить электрический ток. За счет этого уменьшаются несвоевременные изменения предупредительного сигнала, снижаются риски появления искажений и повышается надежность медицинской системы.
Время задержки может быть равно по меньшей мере части периода предупреждения, соответствующего темпу предупреждения, в частности равно по меньшей мере части интервала времени, предпочтительно составляет от 30% до 100% интервала времени, в частности от 50% до 100%, например от 60% до 90%.
Согласно альтернативному варианту, устройство обработки может определять электрическую характеристику с частотой измерения, причем электрический ток имеет период измерения, соответствующий частоте измерения, при этом время задержки может быть равно по меньшей мере части периода измерения, предпочтительно составляет от 10% до 500% периода измерения.
Время задержки может в два раза превышать период измерения, и устройство обработки может быть выполнено с возможностью вычисления средней электрической характеристики на основании электрических характеристик, определяемых в каждый из периодов измерения, происходящих в течение времени задержки, и с возможностью изменения параметра предупредительного сигнала в зависимости от вычисленной средней электрической характеристики.
Период измерения может составлять от 50 мс до 250 мс, предпочтительно 200мс.
Указанный по меньшей мере один переменный параметр предупредительного сигнала может включать темп предупреждения, при этом устройство обработки выполнено с возможностью изменять темп предупреждения после истечения времени задержки.
Темп предупреждения может составлять от 1 Гц до 20 Гц.
Указанный по меньшей мере один переменный параметр предупредительного сигнала может включать частоту предупреждения, на которой передается каждый из участков предупреждения, при этом устройство обработки выполнено с возможностью изменять частоту предупреждения после истечения времени задержки.
Частота предупреждения может составлять от 470 Гц до 2600 Гц.
Указанный по меньшей мере один переменный параметр предупредительного сигнала может включать амплитуду предупреждения, при этом устройство обработки выполнено с возможностью изменять амплитуду предупреждения после истечения времени задержки.
Устройство обработки может быть выполнено с возможностью определять электропроводимость в качестве электрической характеристики и с возможностью:
- увеличивать параметр предупредительного сигнала, когда электропроводимость увеличивается,
- уменьшать параметр предупредительного сигнала, когда электропроводимость уменьшается.
В альтернативном варианте устройство обработки может быть выполнено с возможностью определять удельное сопротивление в качестве электрической характеристики и с возможностью:
- увеличивать параметр предупредительного сигнала, когда удельное сопротивление уменьшается,
- уменьшать параметр предупредительного сигнала, когда удельное сопротивление увеличивается.
Устройство обработки может быть выполнено с возможностью поддерживать постоянным указанный по меньшей мере один переменный параметр предупредительного сигнала, пока электрическая характеристика остается ниже порога и с возможностью изменять параметр предупредительного сигнала, когда электрическая характеристика достигает порога.
Другие задачи и преимущества изобретения будут более очевидны из нижеследующего описания частного варианта осуществления изобретения, представленного в качестве не ограничительного примера со ссылками на прилагаемые чертежи.
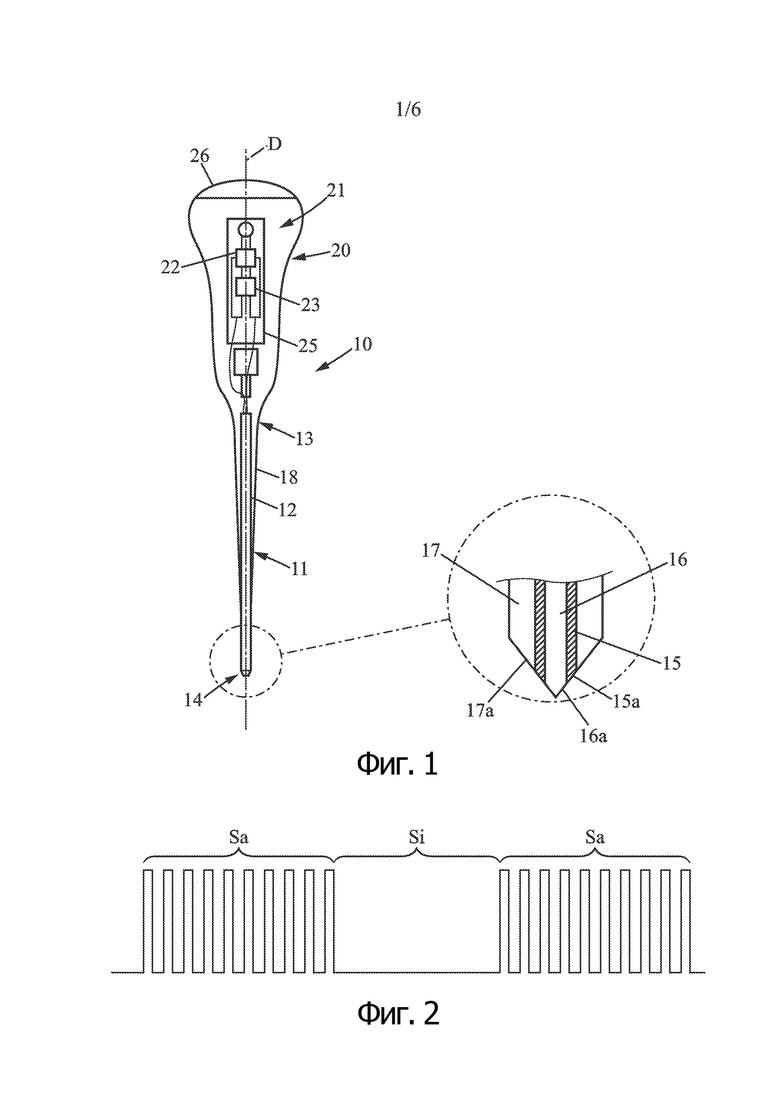
На фиг. 1 показан схематичный вид медицинской системы согласно варианту осуществления изобретения, при этом медицинская система содержит устройство обработки, выполненное с возможностью выдавать предупредительный сигнал, соответствующий электрической характеристике, отображающей способность ткани анатомической структуры проводить электрический ток между первой и второй контактными поверхностями;
на фиг. 2 - изображение прерывистого предупредительного сигнала, имеющего темп предупреждения, при котором участки предупреждения, воспринимаемые пользователем, передаются последовательно с интервалом времени между двумя последовательными участками предупреждения, при этом каждый участок предупреждения имеет частоту предупреждения и амплитуду предупреждения;
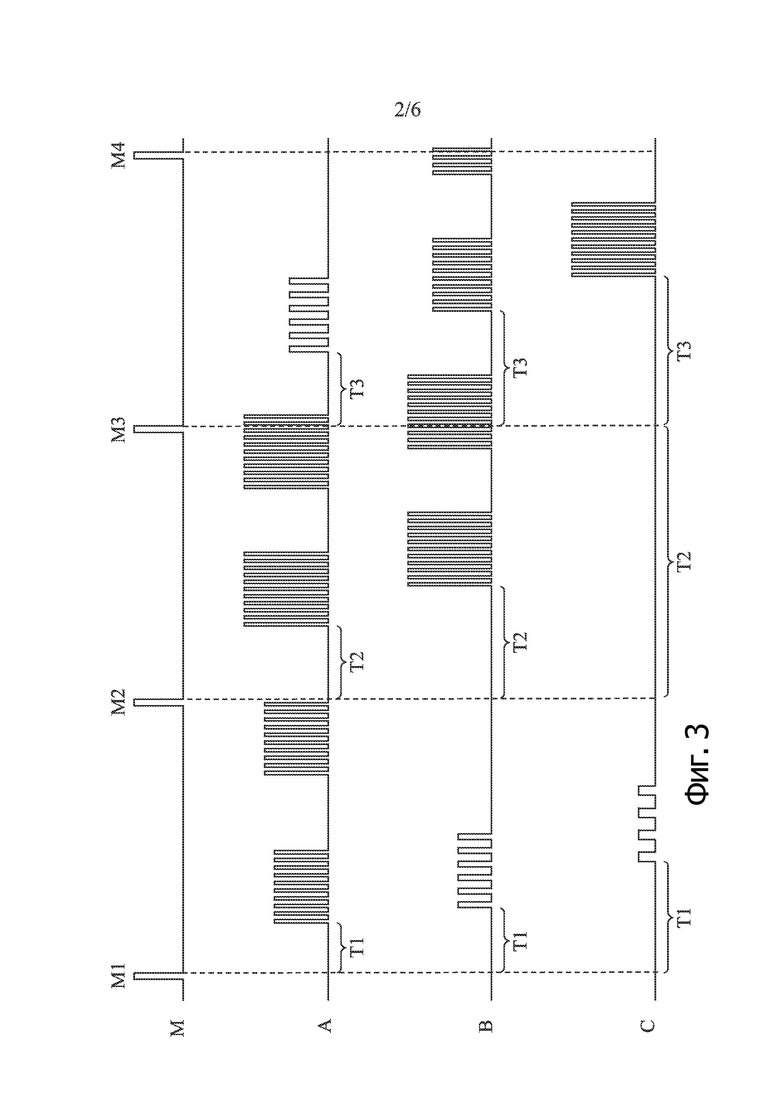
на фиг. 3 - изображение сигнала измерения (М) и трех предупредительных сигналов (А, В, С), передаваемых соответственно во время проникновения медицинской системы в три разные анатомические структуры, при этом темп предупреждения, частота предупреждения и амплитуда предупреждения меняются после истечения времени задержки в зависимости от изменения электрической характеристики;
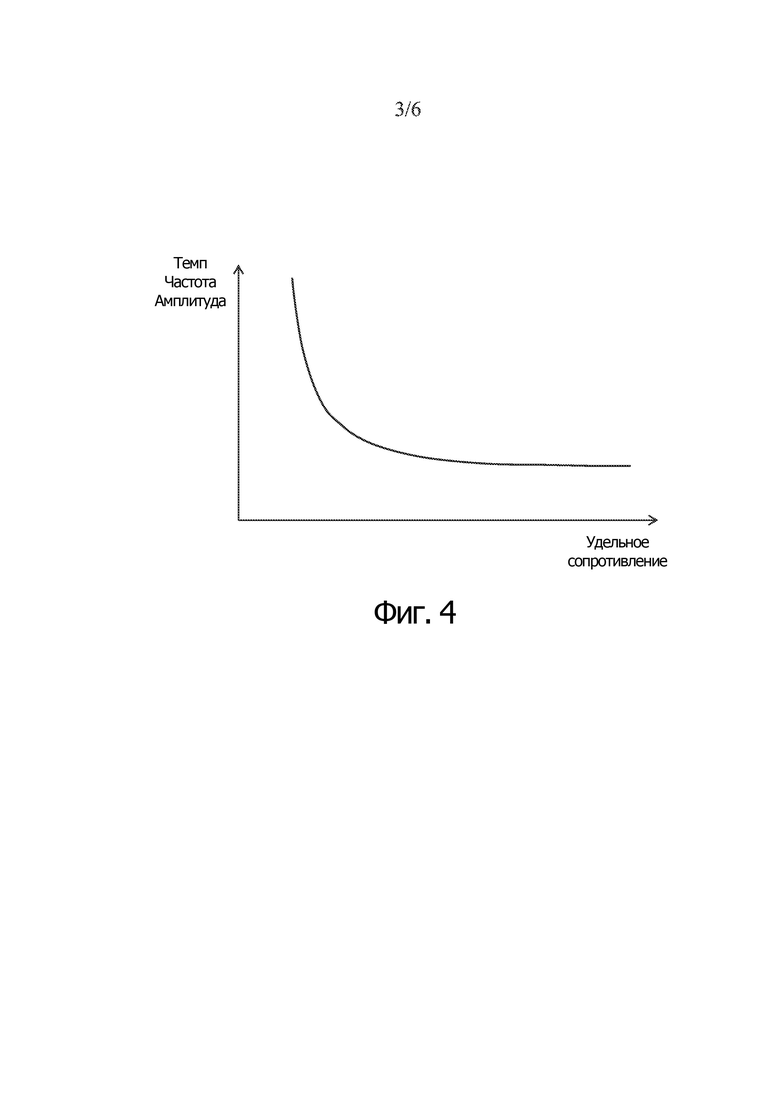
на фиг. 4 - изображение переходной функции, записанной в устройстве обработки и связывающей значение темпа предупреждения, частоты предупреждения и/или амплитуды предупреждения с каждым из значений электрической характеристики;
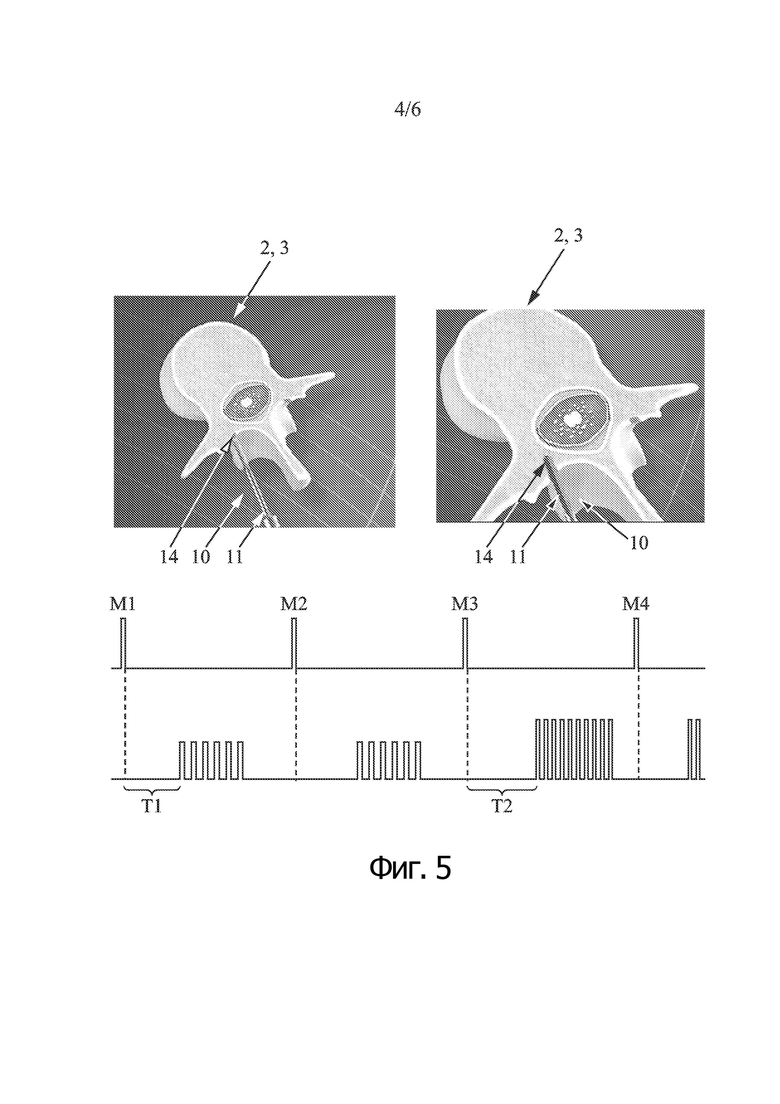
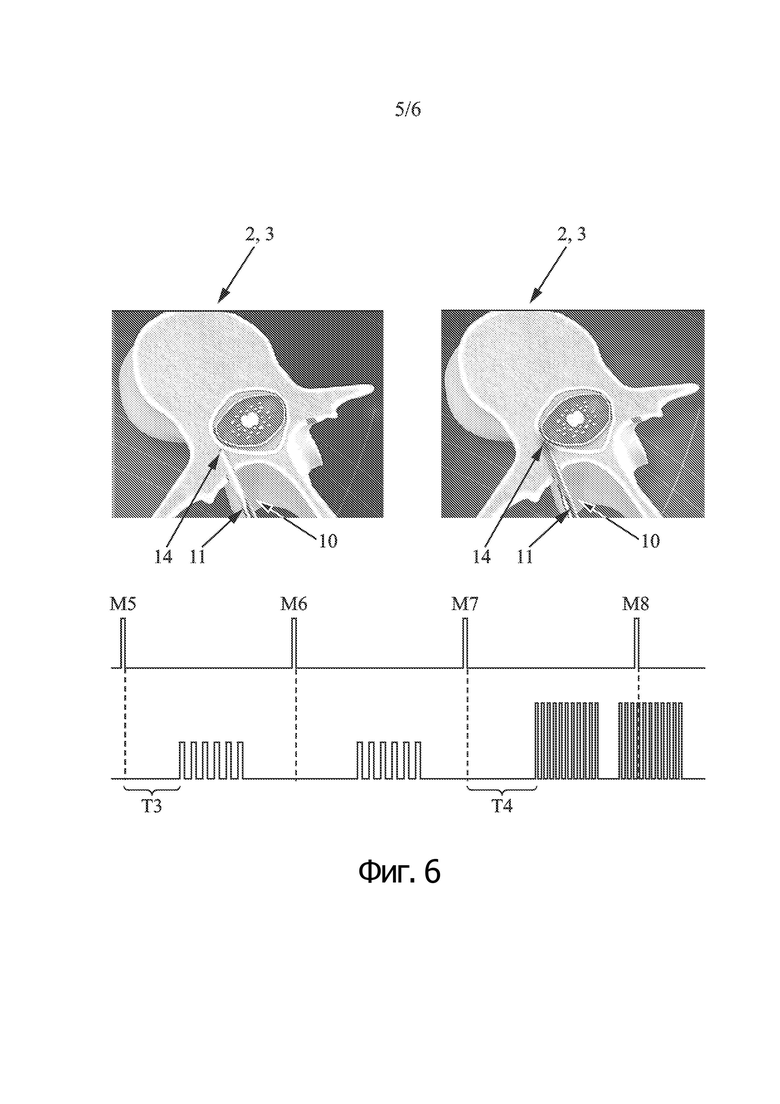
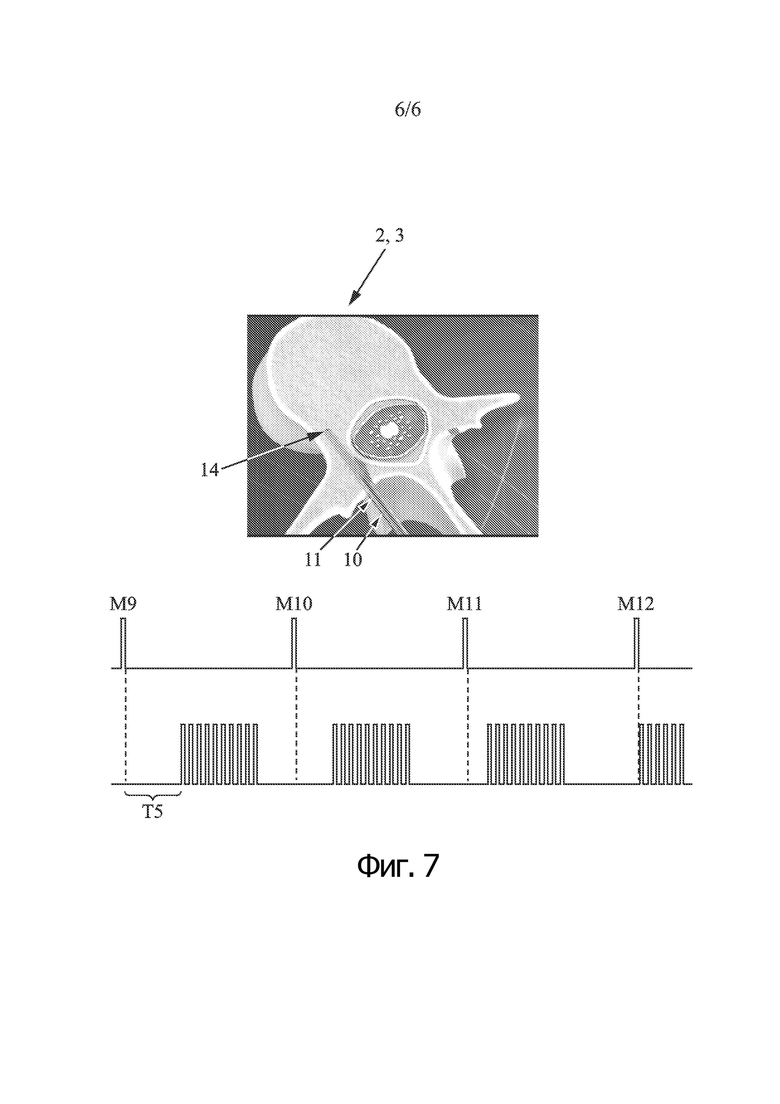
на фиг. 5, 6 и 7 - изображения сигнала измерения и предупредительного сигнала во время проникновения медицинской системы в позвонок позвоночника пациента.
На фигурах идентичные или аналогичные элементы имеют одинаковые обозначения.
На фиг. 1 схематично показана медицинская система в виде хирургического инструмента 10, манипулируемого врачом вручную для сверления костной структуры 3, такой как позвонок 2 позвоночника пациента. Вместе с тем, изобретение не ограничивается этим типом хирургического инструмента и применением для костной структуры. В частности, изобретение можно применять для любого типа анатомической структуры с любым типом медицинской системы, манипулируемой вручную или при помощи робота-манипулятора. Медицинская система может содержать хирургический или медицинский инструмент любого типа, ручной или механизированный, и, в частности, зонд, квадратный наконечник, сверло, шпатель или кюретку. Она может также содержать имплантат, такой как винт, в частности педикулярный винт.
Инструмент 10 содержит корпус 11, выполненный с возможностью проникновения в костную структуру 3, и кожух 20, образующий ручку, соединенную с корпусом 11 и выполненную с возможностью удержания в руке врача. В зависимости от применения кожух 20 может быть также выполнен с возможностью соединения с концом роботизированного манипулятора.
Корпус 11 имеет наружную поверхность 12, которая служит держателем для первого 16 и второго 17 электродов, имеющих соответственно первую 16а и вторую 17а контактные поверхности, выполненные с возможностью вхождения в контакт с костной структурой 3 на расстоянии друг от друга.
В представленном варианте осуществления изобретения корпус 11 является конусным с круглым сечением вокруг центральной оси D и проходит от проксимального конца 13, соединенного, возможно разъемно, с ручкой 20, до дистального конца 14, образующего проникающий конец в виде усеченного конуса или пирамиды. Однако корпус 11 может иметь любую другую форму, в частности конусную или цилиндрическую с многоугольным или другим сечением.
Первый электрод 16, имеющий цилиндрическую форму и выполненный из проводящего материала, проходит внутри корпуса 11 параллельно центральной оси D. В частности, первый электрод 16 расположен в центральном отверстии корпуса 11 и проходит коаксиально с центральной осью D до свободного конца, образующего первую контактную поверхность 16а. Первая контактная поверхность 16а доходит до наружной поверхности 12 корпуса 11 на его дистальном конце 14.
Второй электрод 17, являющийся кольцевым и выполненный из проводящего материала, проходит вдоль центральной оси D вокруг первого электрода 16. В частности, второй электрод 17 может быть образован самим корпусом 11, который в этом случае выполнен из проводящего материала. Вторая контактная поверхность 17а второго электрода 17 состоит из цилиндрического участка, параллельного центральной оси D и соответствующего боковой поверхности корпуса 11, и из кольцевого участка, поперечного относительно центральной оси D и соответствующего дистальной поверхности корпуса 11.
Между первым 16 и вторым 17 электродами расположен слой электроизолирующего материала 15. Слой электроизолирующего материала 15 проходит вдоль корпуса 11 от проксимального конца 13 корпуса 11 до дистального конца 14 корпуса 11, до которого он доходит свободной концевой поверхностью 15а. В представленном варианте осуществления изобретения кольцевой слой электроизолирующего материала 15 расположен вдоль центральной оси D вокруг первого электрода 16 и внутри второго электрода 17.
Изобретение не ограничивается описанными выше выполнением и расположением корпуса 11, первого 16 и второго 17 электродов и слоя электроизолирующего материала 15. В целом, первый 16 и второй 17 электроды не обязательно расположены коаксиально. В частности, эти первый 16 и второй 17 электроды могут быть выполнены, каждый, в виде стержня из проводящего материала, погруженного в корпус 11. Кроме того, первый электрод 16 и второй электрод 17 могут иметь, каждый, изолированную контактную поверхность 16а, 17а, доходящую до боковой поверхности или дистальной поверхности корпуса 11. Кроме того, корпус 11 может служить для крепления двух или более двух первых электродов 16 и двух или более двух вторых электродов 17.
Ручка 20, выполненная в виде цилиндрического тела вращения, расположена по существу коаксиально с центральной осью D корпуса 11. Ручка 20 имеет форму, облегчающую удержание в руке и манипулирование инструментом 10. Ручка 20, выполненная из пластического материала, неподвижно соединена с муфтой 18 из пластического материала, расположенной на части наружной поверхности 12 корпуса 11.
Ручка 20 содержит гнездо 21, выполненное с возможностью размещения в нем электрического генератора 22 и устройства 23 обработки, например, расположенных на электронной плате 25, вставленной в гнездо 21 через отверстие, выполненное на конце ручки 20, противоположном корпусу 11. Съемная крышка 26 позволяет закрывать гнездо 21.
Электрический генератор 22 выполнен с возможностью подавать электрический ток М между первой 16а и второй 17а контактными поверхностями. В частном варианте осуществления изобретения, показанном на фиг. 3, но не ограничиваясь этим вариантом, электрический генератор выдает электрический ток М в виде импульсов напряжения 1,2 В с частотой измерения 5 Гц. При этом электрический ток М имеет период измерения, соответствующий частоте измерения, 200 мс. В качестве альтернативы напряжение электрического тока может быть любым напряжением ниже 2 В, предпочтительно от 1 В до 2 В, в частности от 1,1 В до 1,5 В. Частота измерения может составлять от 4 Гц до 20 Гц, при этом период измерения составляет от 50 мс до 250 мс.
Устройство 23 обработки выполнено с возможностью определять электрическую характеристику, отображающую способность костной структуры 3 проводить электрический ток М между первой 16а и второй 17а контактными поверхностями. В частности, на основании напряжения электрического тока М устройство 23 обработки может измерять силу электрического тока М, проходящего через ткань между первой 16а и второй 17а контактными поверхностями. На основании известного напряжения и измеренной силы электрического тока устройство 23 обработки может определить электрическую характеристику, такую как удельное сопротивление. Это измерение силы электрического тока М и определение удельного сопротивления можно осуществлять в соответствии с частотой измерения, при этом измерение производят при каждом импульсе электрического тока М. В качестве альтернативы электрический генератор 22 может выдавать электрический ток М, сила которого известна, и устройство 23 обработки может быть выполнено с возможностью измерять напряжение электрического тока, чтобы определить электрическую характеристику на основании известной силы и измеренного напряжения электрического тока.
Ткани костной структуры 3 имеют разные способности проводить электрический ток. Например, кортикальная кость имеет удельное сопротивление, превышающее удельное сопротивление губчатой кости, которая, в свою очередь, имеет удельное сопротивление, превышающее удельное сопротивление текучих сред, таких как кровь. Такое устройство 23 обработки позволяет сравнительным образом обнаруживать изменение ткани на основании изменения удельного сопротивления и даже абсолютно идентифицировать ткань на основании значения удельного сопротивления.
Устройство 23 обработки выполнено также с возможностью выдавать предупредительный сигнал, соответствующий определенному удельному сопротивлению. Предупредительный сигнал может представлять собой звуковой предупредительный сигнал, световой предупредительный сигнал, тактильный предупредительный сигнал (вибрации) или комбинацию таких предупредительных сигналов.
Показанный на фиг. 2 предупредительный сигнал, например звуковой сигнал, является прерывистым. Он имеет темп предупреждения, в соответствии с которым воспринимаемые врачом участки Sa предупреждения последовательно передаются с интервалом времени Si между двумя последовательными участками Sa предупреждения. В частности, темп предупреждения может составлять от 1 Гц до 20 Гц. Темп предупреждения характеризует скорость, с которой передаются участки Sa предупреждения, например, соответствующие коротким гудкам в случае звукового предупредительного сигнала. В частном варианте осуществления изобретения каждый участок Sa предупреждения имеет одинаковую продолжительность, например 35,5 мс, при этом интервал времени Si, соответствующий времени тишины, меняется в зависимости от темпа предупреждения. Определяют также период предупреждения, соответствующий темпу предупреждения и содержащий участок Sa предупреждения и интервал времени Si.
Кроме того, каждый участок Sa предупреждения является периодическим и имеет частоту предупреждения. В частности, частота предупреждения может составлять от 470Гц до 2600 Гц. Частота предупреждения характеризует тональность каждого из участков Sa предупреждения, при этом участок предупреждения переходит от низкой к высокой тональности при увеличении частоты предупреждения. В частном варианте осуществления изобретения каждый участок предупреждения содержит серию импульсов, каждый из которых имеет одинаковую продолжительность, например 230 мкс.
Каждый участок Sa предупреждения может также иметь амплитуду предупреждения, характеризующую интенсивность, с которой передается участок Sa предупреждения.
В варианте осуществления изобретения, показанном на фиг. 3, устройство 23 обработки выполнено с возможностью изменять все параметры предупредительного сигнала, а именно темп предупреждения, частоту предупреждения и амплитуду предупреждения в зависимости от удельного сопротивления. В частности, устройство 23 обработки:
- увеличивает темп предупреждения, частоту предупреждения и амплитуду предупреждения предупредительного сигнала, когда удельное сопротивление уменьшается, и
- уменьшает темп предупреждения, частоту предупреждения и амплитуду предупреждения предупредительного сигнала, когда удельное сопротивление увеличивается.
Альтернативно, устройство 23 обработки выполнено с возможностью определять электропроводимость в качестве электрической характеристики и с возможностью:
- увеличивать один или несколько параметров предупредительного сигнала, выбранных среди темпа предупреждения, частоты предупреждения и амплитуды предупреждения, когда электропроводимость увеличивается,
- уменьшать один или несколько параметров предупредительного сигнала, выбранных среди темпа предупреждения, частоты предупреждения и амплитуды предупреждения, когда электропроводимость уменьшается.
Кроме того, как вытекает из всего вышесказанного, только один или два из параметров, выбранных среди темпа предупреждения, частоты предупреждения и амплитуды предупреждения, могут меняться в зависимости от определенной электрической характеристики.
Кроме того, как показано на фиг. 3, при обнаружении изменения удельного сопротивления устройство 23 обработки меняет параметр или параметры предупредительного сигнала только по истечении времени задержки Т. Это время задержки можно выбирать любым соответствующим образом, чтобы избегать возмущений предупредительного сигнала. Оно может быть фиксированным или переменным.
Как показано на фиг. 3, производят последовательно четыре измерения в трех разных анатомических структурах. После первого измерения можно произвольно выбрать первое время задержки Т1, в частности, как часть периода измерения. Для следующих измерений значения времени задержки соответствуют не истекшим частям периода предупреждения предупредительного сигнала, соответствующего удельному сопротивлению, определенному при предыдущем измерении.
Таким образом, во время проникновения корпуса 11 в первую анатомическую структуру выдается первый предупредительный сигнал А. При первом измерении М1 устройство 23 обработки определяет первое удельное сопротивление. После произвольного первого времени задержки Т1 оно выдает предупредительный сигнал с соответствующими первыми темпом предупреждения, частотой предупреждения и амплитудой предупреждения. При втором измерении М2 устройство 23 обработки определяет второе удельное сопротивление, меньшее первого удельного сопротивления. После второго времени задержки Т2, по существу соответствующего интервалу времени предупредительного сигнала первого измерения, оно выдает предупредительный сигнал с соответствующими вторыми темпом предупреждения, частотой предупреждения и амплитудой предупреждения, превышающими первые темп предупреждения, частоту предупреждения и амплитуду предупреждения. При третьем измерении М3 устройство 23 обработки определяет третье удельное сопротивление, превышающее первое и второе удельные сопротивления. После третьего времени задержки Т3, соответствующего части периода предупреждения, содержащего импульсы участка предупреждения и интервал времени предупредительного сигнала второго измерения, оно выдает предупредительный сигнал с соответствующими третьими темпом предупреждения, частотой предупреждения и амплитудой предупреждения, меньшими первых и вторых темпа предупреждения, частоты предупреждения и амплитуды предупреждения.
Точно так же, во время проникновения корпуса 11 во вторую анатомическую структуру, выдается второй предупредительный сигнал В. При первом измерении М1 устройство 23 обработки определяет первое удельное сопротивление. После произвольного первого времени задержки Т1 оно выдает предупредительный сигнал с соответствующими первыми темпом предупреждения, частотой предупреждения и амплитудой предупреждения. При втором измерении М2 устройство 23 обработки определяет второе удельное сопротивление, меньшее первого удельного сопротивления. После второго времени задержки Т2, соответствующего части интервала времени предупредительного сигнала первого измерения, оно выдает предупредительный сигнал с соответствующими вторыми темпом предупреждения, частотой предупреждения и амплитудой предупреждения, превышающими первые темп предупреждения, частоту предупреждения и амплитуду предупреждения. При третьем измерении М3 устройство 23 обработки определяет третье удельное сопротивление, меньшее, чем первое удельное сопротивление, и превышающее второе удельное сопротивление. После третьего времени задержки Т3, по существу соответствующего части периода предупреждения, содержащего импульсы участка предупреждения и интервал времени предупредительного сигнала второго измерения, оно выдает предупредительный сигнал с соответствующими третьими темпом предупреждения, частотой предупреждения и амплитудой предупреждения, превышающими первые темп предупреждения, частоту предупреждения и амплитуду предупреждения и меньшими вторых темпа предупреждения, частоты предупреждения и амплитуды предупреждения.
Во время проникновения корпуса 11 в третью анатомическую структуру, выдается третий предупредительный сигнал С. При первом измерении М1 устройство 23 обработки определяет первое удельное сопротивление. После произвольного первого времени задержки Т1 оно выдает предупредительный сигнал с соответствующими первыми темпом предупреждения, частотой предупреждения и амплитудой предупреждения. При втором измерении М2 устройство 23 обработки определяет второе удельное сопротивление. Однако это измерение происходит в течение второго времени задержки, соответствующего части интервала времени первого измерения. При этом не выдается никакой предупредительный сигнал, соответствующий второму измерению, пока не будет осуществлено третье измерение М3. При третьем измерении М3 устройство 23 обработки определяет третье удельное сопротивление, меньшее первого удельного сопротивления. После третьего времени задержки Т3, соответствующего части интервала времени первого измерения, оно выдает предупредительный сигнал с соответствующими вторыми темпом предупреждения, частотой предупреждения и амплитудой предупреждения, превышающими первые темп предупреждения, частоту предупреждения и амплитуду предупреждения.
В качестве альтернативы время задержки Т можно выбирать любым другим соответствующим образом. В частности, время задержки может составлять от 30% до 100% интервала времени Si, в частности от 50% до 100% интервала времени Si и, например, от 60% до 90% интервала времени Si.
Согласно другому варианту, время задержки может быть равно по меньшей мере части периода измерения, предпочтительно может составлять от 10% до 500% периода измерения. В этом другом варианте, если время задержки в два раза превышает период измерения, устройство обработки может вычислить среднюю электрическую характеристику на основании электрических характеристик, определенных в каждый из периодов измерения, произошедших в течение времени задержки. При этом параметр или параметры предупредительного сигнала можно модулировать в зависимости от вычисленной средней электрической характеристики. Это позволяет ограничить чувствительность хирургического инструмента 10 к локальным неоднородностям.
Далее со ссылками на фиг. 4-7 следует описание применения хирургического инструмента 10 во время выполнения отверстия в одной из ножек позвонков. Кортикальная кость имеет удельное сопротивление, превышающее удельное сопротивление губчатой кости, а губчатая кость имеет удельное сопротивление, превышающее удельное сопротивление крови.
На фиг. 4 представлен пример переходной функции, записанной в устройстве 23 обработки и связывающей значение темпа предупреждения, частоты предупреждения и/или амплитуды предупреждения с каждым из значений удельного сопротивления. Когда ткань, с которой входят в контакт первая 16а и вторая 17а контактные поверхности, меняется, происходит изменение удельного сопротивления, которое выражается изменением по меньшей мере одного из параметров среди темпа предупреждения, частоты предупреждения и/или амплитуды предупреждения.
Переходную функцию выбирают таким образом, чтобы уменьшать темп предупреждения, частоту предупреждения и/или амплитуду предупреждения по мере увеличения удельного сопротивления.
Таким образом, когда первая 16а и вторая 17а контактные поверхности хирургического инструмента 10 входят в контакт с кровью или с мягкими тканями, имеющими низкое удельное сопротивление, предупредительный сигнал имеет повышенные темп предупреждения, частоту предупреждения и амплитуду предупреждения. Когда первая 16а и вторая 17а контактные поверхности хирургического инструмента 10 входят в контакт с губчатой костью, удельное сопротивление которой находится в пределах между удельным сопротивлением крови или мягких тканей и удельным сопротивлением кортикальной кости, предупредительный сигнал имеет промежуточные темп предупреждения, частоту предупреждения и амплитуду предупреждения. И когда первая 16а и вторая 17а контактные поверхности хирургического инструмента 10 входят в контакт с кортикальной костью, имеющей высокое удельное сопротивление, предупредительный сигнал имеет низкие темп предупреждения, частоту предупреждения и/или амплитуду предупреждения.
Переходную функцию выбирают также так, чтобы изменять темп предупреждения, частоту предупреждения и/или амплитуду предупреждения в более значительной степени при низких значениях удельного сопротивления, чем при повышенных значениях удельного сопротивления.
Таким образом, хирургический инструмент позволяет отображать с более высокой чувствительностью изменения удельного сопротивления в ситуациях, представляющих наибольший риск для пациента, то есть когда первая 16а и вторая 17а контактные поверхности хирургического инструмента 10 входят в контакт или находятся вблизи крови или мягких тканей.
Как показано на фиг. 5, производят два первых измерения М1, М2, когда дистальный конец 14 корпуса 11 хирургического инструмента с первой 16а и второй 17а контактными поверхностями входит в контакт с наружным слоем кортикальной кости. После первого времени задержки Т1, следующего за первым измерением М1, выдается первый предупредительный сигнал, соответствующий удельному сопротивлению кортикальной кости, и продолжает передаваться после второго измерения М2, при этом не обнаруживают никакого изменения удельного сопротивления. При третьем измерении М3 дистальный конец 14 корпуса 11 хирургического инструмента 10 проник в губчатую кость. После второго времени задержки Т2, следующего за третьим измерением М3, выдают второй предупредительный сигнал, соответствующий удельному сопротивлению губчатой кости, и продолжают выдавать его после четвертого измерения М4, при этом не обнаруживают никакого изменения удельного сопротивления.
Как показано на фиг. 6, при пятом измерении М5 дистальный конец 14 корпуса 11 хирургического инструмента 10 находится вблизи внутреннего слоя кортикальной кости, окружающего позвонковое отверстие. После третьего времени задержки Т3, следующего за пятым измерением М5, выдают первый предупредительный сигнал, соответствующий удельному сопротивлению кортикальной кости, и продолжают выдавать его после шестого измерения М6, при этом не обнаруживают никакого изменения удельного сопротивления. При седьмом измерении М7, дистальный конец 14 корпуса 11 хирургического инструмента 10 пробил кортикальную кость, и кровь поступает в полость, образованную корпусом 11. После четвертого времени задержки Т4, следующего за седьмым измерением М7, выдают третий предупредительный сигнал, соответствующий удельному сопротивлению крови, и продолжают выдавать его после восьмого измерения М8, при этом не обнаруживают никакого изменения удельного сопротивления.
Как показано на фиг. 7, перед девятым измерением М9 врач скорректировал траекторию после восприятия третьего предупредительного сигнала. Дистальный конец 14 корпуса 11 хирургического инструмента 10 был возвращен в губчатую кость, и после пятого времени задержки Т5, следующего за девятым измерением М9, выдают второй предупредительный сигнал, соответствующий удельному сопротивлению губчатой кости, и продолжают выдавать его после десятого М10, одиннадцатого М11 и двенадцатого М12 измерений, при этом не обнаруживают никакого изменения удельного сопротивления.
В качестве альтернативы, чтобы ограничить чувствительность хирургического инструмента к локальным неоднородностям, на основании порогов можно определить диапазоны удельного сопротивления. Для каждого диапазона удельного сопротивления можно выбирать соответствующие параметры предупредительного сигнала. При этом параметр или параметры предупредительного сигнала остаются постоянными, пока определенное удельное сопротивление остается в определенном диапазоне, меньшем определенного порога. Когда определенное удельное сопротивление меняет диапазон удельного сопротивления и переходит через соответствующий порог, один или несколько параметров, выбранных среди темпа предупреждения, частоты предупреждения и амплитуды предупреждения, могут меняться.
В частности, при использовании хирургического инструмента, аналогичного описанному выше хирургическому инструменту, позволяющему определять абсолютное значение удельного сопротивления вместо простого изменения этого удельного сопротивления, можно определить три диапазона удельного сопротивления. Так, можно определить:
- первый диапазон удельного сопротивления для кортикальной кости, с которым связывают первый предупредительный сигнал с низкими и постоянными темпом предупреждения, частотой предупреждения и амплитудой предупреждения,
- второй диапазон удельного сопротивления для кортикальной кости, с которым связывают второй предупредительный сигнал с промежуточными и постоянными темпом предупреждения, частотой предупреждения и амплитудой предупреждения,
- третий диапазон удельного сопротивления для кортикальной кости, с которым связывают третий предупредительный сигнал с высокими и постоянными темпом предупреждения, частотой предупреждения и амплитудой предупреждения.
Изобретение относится к медицинской технике, а именно к медицинской системе для проникновения в анатомическую структуру пациента, которая содержит ткани с разными способностями проводить электрический ток. Система содержит корпус, первый и второй электроды, электрический генератор и устройство обработки. Корпус выполнен с возможностью проникновения в анатомическую структуру и имеет наружную поверхность. Первый электрод содержит первую контактную поверхность на наружной поверхности корпуса для вхождения в контакт с тканями анатомической структуры. Второй электрод содержит вторую контактную поверхность на наружной поверхности корпуса для вхождения в контакт с тканями анатомической структуры на расстоянии от первой контактной поверхности. Электрический генератор выполнен с возможностью подачи электрического тока между первой и второй контактными поверхностями. Устройство обработки выполнено с возможностью определять электрическую характеристику, отображающую способность ткани анатомической структуры между первой и второй контактными поверхностями проводить электрический ток, и с возможностью выдавать предупредительный сигнал, соответствующий определенной электрической характеристике. Параметр предупредительного сигнала меняется в зависимости от определенной электрической характеристики. Предупредительный сигнал является прерывистым и имеет темп предупреждения, при котором участки предупреждения передаются последовательно с интервалом времени между двумя последовательными участками предупреждения. Устройство обработки выполнено с возможностью обнаруживать изменение электрической характеристики и изменять указанный параметр после истечения времени задержки, следующего за изменением электрической характеристики. Достигается повышение надежности медицинской системы и снижение риска появления искажений за счет уменьшения несвоевременных изменений предупредительного сигнала посредством времени задержки и передачи предупредительного сигнала с запаздыванием для ограничения или модулирования чувствительности медицинской системы к точечным изменениям измеряемых параметров. 12 з.п. ф-лы, 7 ил.
1. Медицинская система (10), предназначенная для проникновения в анатомическую структуру (2, 3) пациента, причем анатомическая структура (2, 3) содержит ткани, обладающие разными способностями проводить электрический ток, при этом медицинская система (10) содержит:
- корпус (11), выполненный с возможностью проникновения в анатомическую структуру (2, 3), причем корпус (11) имеет наружную поверхность (12),
- по меньшей мере один первый электрод (16), содержащий первую контактную поверхность (16а), расположенную на наружной поверхности (12) корпуса (11), для вхождения в контакт с тканями анатомической структуры (2, 3),
- по меньшей мере один второй электрод (17), содержащий вторую контактную поверхность (17а), расположенную на наружной поверхности (12) корпуса (11), для вхождения в контакт с тканями анатомической структуры (2, 3) на расстоянии от первой контактной поверхности (16а),
- электрический генератор (22), выполненный с возможностью подачи электрического тока (М) между первой (16а) и второй (17а) контактными поверхностями,
- устройство (23) обработки, выполненное с возможностью определять электрическую характеристику, отображающую способность ткани анатомической структуры (2, 3) между первой (16а) и второй (17а) контактными поверхностями проводить электрический ток (М), и с возможностью выдавать предупредительный сигнал, соответствующий определенной электрической характеристике, причем предупредительный сигнал имеет по меньшей мере один параметр, меняющийся в зависимости от определенной электрической характеристики,
при этом предупредительный сигнал является прерывистым и имеет темп предупреждения, при котором участки (Sa) предупреждения, воспринимаемые пользователем, передаются последовательно с интервалом времени (Si) между двумя последовательными участками (Sa) предупреждения,
отличающаяся тем, что устройство (23) обработки выполнено с возможностью обнаруживать изменение электрической характеристики и изменять указанный по меньшей мере один переменный параметр предупредительного сигнала после истечения времени задержки (Т), следующего за изменением электрической характеристики.
2. Медицинская система (10) по п. 1, в которой время задержки (Т) равно по меньшей мере части периода предупреждения, соответствующего темпу предупреждения, в частности равно по меньшей мере части интервала времени (Si), предпочтительно составляет от 30% до 100% интервала времени (Si), в частности от 50% до 100%, например от 60% до 90%.
3. Медицинская система (10) по п. 1, в которой устройство (23) обработки определяет электрическую характеристику с частотой измерения, при этом электрический ток (М) имеет период измерения, соответствующий частоте измерения, причем время задержки (Т) равно по меньшей мере части периода измерения, предпочтительно составляет от 10% до 500% периода измерения.
4. Медицинская система (10) по п. 3, в которой время задержки (Т) в два раза превышает период измерения, при этом устройство (23) обработки выполнено с возможностью вычисления средней электрической характеристики на основании электрических характеристик, определенных в каждый из периодов измерения, происходящих в течение времени задержки (Т), и с возможностью изменения параметра предупредительного сигнала в зависимости от вычисленной средней электрической характеристики.
5. Медицинская система (10) по п. 3 или 4, в которой период измерения составляет от 50 мс до 250 мс, предпочтительно 200 мс.
6. Медицинская система (10) по любому из пп. 1-5, в которой указанный по меньшей мере один переменный параметр предупредительного сигнала включает темп предупреждения, при этом устройство (23) обработки выполнено с возможностью изменять темп предупреждения после истечения времени задержки (Т).
7. Медицинская система (10) по любому из пп. 1-6, в которой темп предупреждения составляет от 1 Гц до 20 Гц.
8. Медицинская система (10) по любому из пп. 1-7, в которой указанный по меньшей мере один переменный параметр предупредительного сигнала включает частоту предупреждения, на которой передается каждый из участков предупреждения, при этом устройство (23) обработки выполнено с возможностью изменять частоту предупреждения после истечения времени задержки (Т).
9. Медицинская система (10) по п. 8, в которой частота предупреждения составляет от 470 Гц до 2600 Гц.
10. Медицинская система (10) по любому из пп. 1-9, в которой указанный по меньшей мере один переменный параметр предупредительного сигнала включает амплитуду предупреждения, при этом устройство (23) обработки выполнено с возможностью изменять амплитуду предупреждения после истечения времени задержки (Т).
11. Медицинская система (10) по любому из пп. 1-10, в которой устройство (23) обработки выполнено с возможностью определять электропроводимость в качестве электрической характеристики и с возможностью:
- увеличивать параметр предупредительного сигнала, когда электропроводимость увеличивается,
- уменьшать параметр предупредительного сигнала, когда электропроводимость уменьшается.
12. Медицинская система (10) по любому из пп. 1-10, в которой устройство (23) обработки выполнено с возможностью определять удельное сопротивление в качестве электрической характеристики и с возможностью:
- увеличивать параметр предупредительного сигнала, когда удельное сопротивление уменьшается,
- уменьшать параметр предупредительного сигнала, когда удельное сопротивление увеличивается.
13. Медицинская система (10) по любому из пп. 1-12, в которой устройство (23) обработки выполнено с возможностью поддерживать постоянным указанный по меньшей мере один переменный параметр предупредительного сигнала, пока электрическая характеристика остается ниже порога и с возможностью изменять параметр предупредительного сигнала, когда электрическая характеристика достигает порога.
| US 2008269645 A1, 30.10.2008 | |||
| WO 03068076 A1, 21.08.2003 | |||
| US 5774055 A, 30.06.1998 | |||
| US 6047201 A, 04.04.2000 | |||
| US 6544200 B1, 08.04.2003 | |||
| US 3858192 A, 31.12.1974 | |||
| Устройство для захвата магистрали ЭВМ | 1982 |
|
SU1075247A1 |
| СПОСОБ УСТРАНЕНИЯ ЛОЖНЫХ СРАБАТЫВАНИЙ ПРИ ВКЛЮЧЕНИИ ЗАЩИЩЕННЫХ ВОЛОКОННО-ОПТИЧЕСКИХ СИСТЕМ | 2006 |
|
RU2350019C2 |

