Изобретение относится к области транспортного машиностроения и может быть использовано для реализации привода колес гибридного транспортного средства, в том числе амфибийного, повышенной проходимости как военного, так и гражданского назначения, имеющего, по меньшей мере, две ведущие оси и предназначенного для эксплуатации как по дорогам общего пользования, так и по пересеченной местности, а также в зонах, где требуется минимальный уровень шумовой и тепловой заметности, создаваемый при передвижении.
Известно гибридное транспортное средство, которое содержит двигатель внутреннего сгорания, связанный через блок трансмиссии с одной из осей, электромоторы, связанные с колесами первой и второй осей, накопитель электрической энергии и электронный блок управления, связанный с электромоторами (см. патент США №6295487, МПК G05D 3/00, опубл. 2001 г.). При проскальзывании, по меньшей мере, одного из ведущих колес электромотор, связанный с этим колесом, работает в регенеративном режиме, вырабатывая электрическую энергию, которая поступает в накопитель. Электронный блок управления в автоматическом режиме распределяет запасенную в результате рекуперации электроэнергию между электромоторами, связанными с остальными колесами, имеющими сцепление с дорогой.
Известна комбинированная энергетическая установка гибридного автомобиля, принятая в качестве прототипа, которая содержит двигатель внутреннего сгорания и два электромотора/генератора, причем электромоторы связаны с первой и второй колесными осями, соответственно (см. патент РФ №2457959, МПК В60K 6/44, B60W 20/00, опубл. 2012 г.). Двигатель внутреннего сгорания и первый электромотор/генератор являются тяговыми, связь между ними имеет возможность размыкания, и они подключены к первой колесной оси посредством промежуточных средств. Второй электромотор/генератор выполнен с возможностью независимой работы от первого электромотора и связан с другой колесной осью постоянно.
Однако недостатком известных гибридных транспортных средств с точки зрения требований к современным транспортным средствам повышенной проходимости военного назначения является отсутствие возможности использования двигателя внутреннего сгорания в качестве приводного при выходе из строя электросистемы.
Кроме этого, недостатком реализации известных комбинированных приводов являются высокие массогабаритные параметры электросистемы транспортного средства и, как следствие, низкий показатель отношения полной массы к массе полезной нагрузки транспортного средства.
Техническая задача, на решение которой направлено заявленное изобретение, заключается в расширении функциональных возможностей транспортного средства за счет реализации двигателя внутреннего сгорания в качестве независимого от электрического приводного устройства при обеспечении энергоэффективности и компактности комбинированного привода гибридного транспортного средства в целом.
Решение поставленной технической задачи достигается за счет того, что комбинированный привод гибридного транспортного средства, содержащий двигатель внутреннего сгорания, связанный посредством сцепления, коробки передач и блока трансмиссии с первой колесной осью, электрический привод в виде двух обратимых электромоторов, из которых, по меньшей мере, один связан со второй колесной осью, а также аккумуляторный блок, подключенный к электромоторам, блок датчиков и электронный блок управления, подключенный к электромоторам, аккумуляторному блоку и блоку датчиков, согласно изобретению комбинированный привод снабжен генератором, а вторая колесная ось выполнена в виде двух автономных полуосей, на которых установлены соответствующие электромоторы, связанные с колесами через дополнительные блоки трансмиссии и устройства «включения/выключения», при этом генератор подключен через электронный блок управления к каждому из электромоторов и имеет автоматически подключаемый синхронизированный привод от двигателя внутреннего сгорания, причем отношение номинальной мощности электромоторов к номинальной мощности двигателя внутреннего сгорания составляет не более 0,4, а отношение установочной мощности генератора к номинальной мощности двигателя внутреннего сгорания составляет не более 0,3.
Решение поставленной технической задачи достигается также тем, что электронный блок управления содержит, по меньшей мере, один контроллер, постоянно отслеживающий показания блока датчиков.
Кроме этого, решение технической задачи достигается тем, что электромоторы выполнены вентильными с жидкостным или воздушным охлаждением.
На решение поставленной задачи направлено то, что каждый блок трансмиссии дополнительно снабжен колесными цилиндрическими или планетарными редукторами.
На решение поставленной технической задачи направлено также то, что двигатель внутреннего сгорания связан с генератором через автоматический центробежный конический вариатор.
Применение второй колесной оси в виде двух автономных полуосей, на каждой из которых установлен электромотор, связанный с колесом через дополнительный блок трансмиссии и устройство «включения/выключения», позволяет расширить функциональные возможности гибридного транспортного средства и обеспечить реализацию двигателя внутреннего сгорания в качестве независимого от электросистемы приводного устройства, т.е. обеспечивает дополнительные режимы работы по сравнению с прототипом. Использование генератора с автоматически подключаемым приводом от двигателя внутреннего сгорания, обуславливающим синхронизацию оборотов ротора генератора и выходного вала двигателя внутреннего сгорания, позволяет обеспечить энергоэффективность электросистемы гибридного транспортного средства за счет работы в оптимальном энергетическом режиме. Вместе с этим, обеспечивается быстрая зарядка аккумуляторного блока в различных режимах движения. При этом, применение электромоторов, отношение номинальной мощности которых к номинальной мощности двигателя внутреннего сгорания составляет не более 0,4, а также использование генератора, отношение установочной мощности которого к номинальной мощности двигателя внутреннего сгорания составляет не более 0,3, обеспечивает компактность электросистемы гибридного транспортного средства.
Изобретение поясняется чертежами, где последовательно представлены:
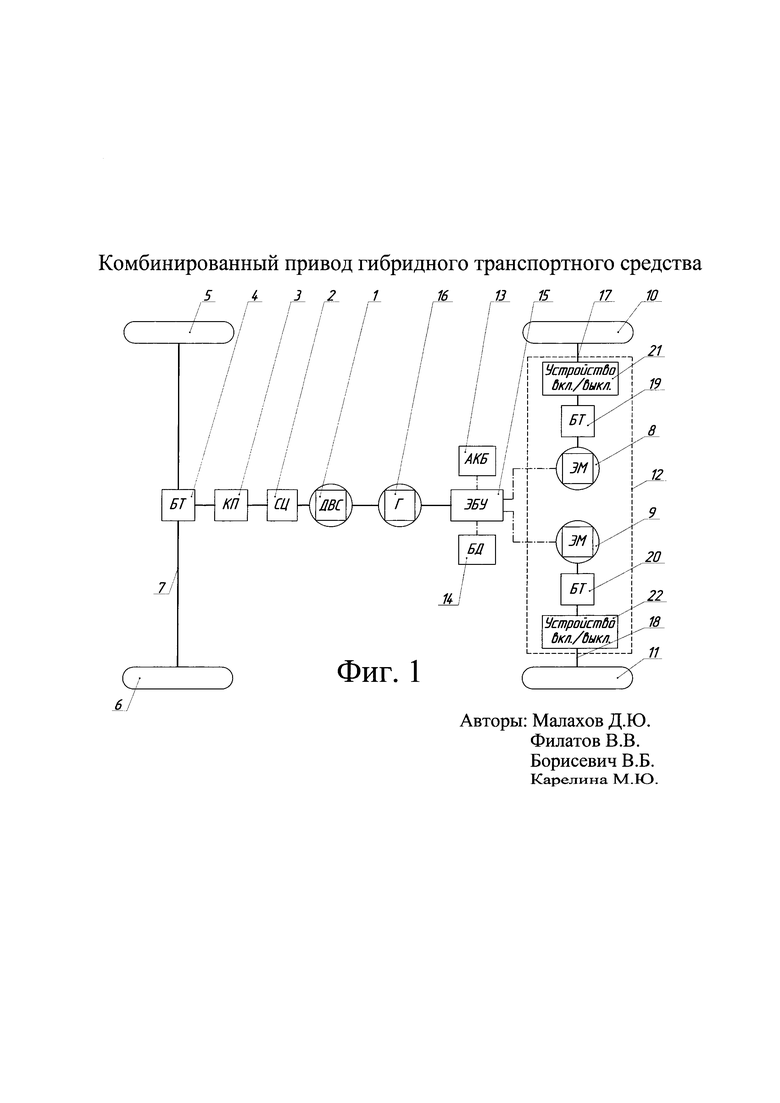
на фиг. 1 - принципиальная схема комбинированного привода гибридного транспортного средства;
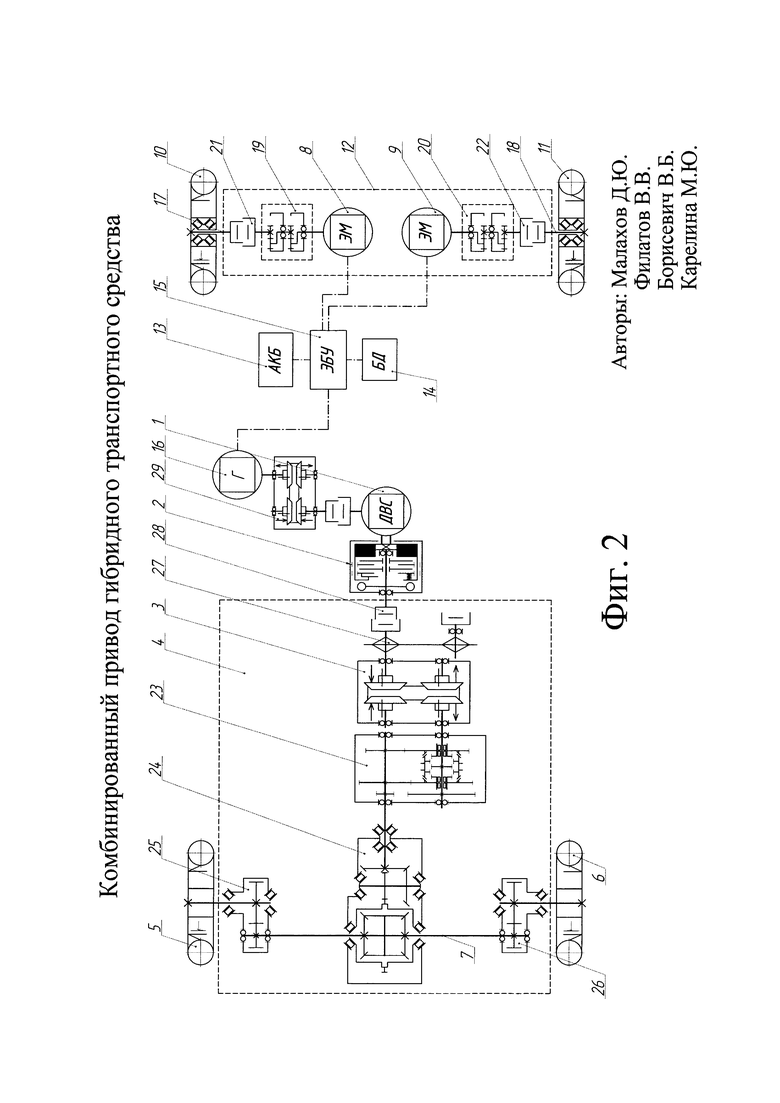
на фиг. 2 - частный случай выполнения комбинированного привода для сухопутного полноприводного четырехколесного гибридного транспортного средства;
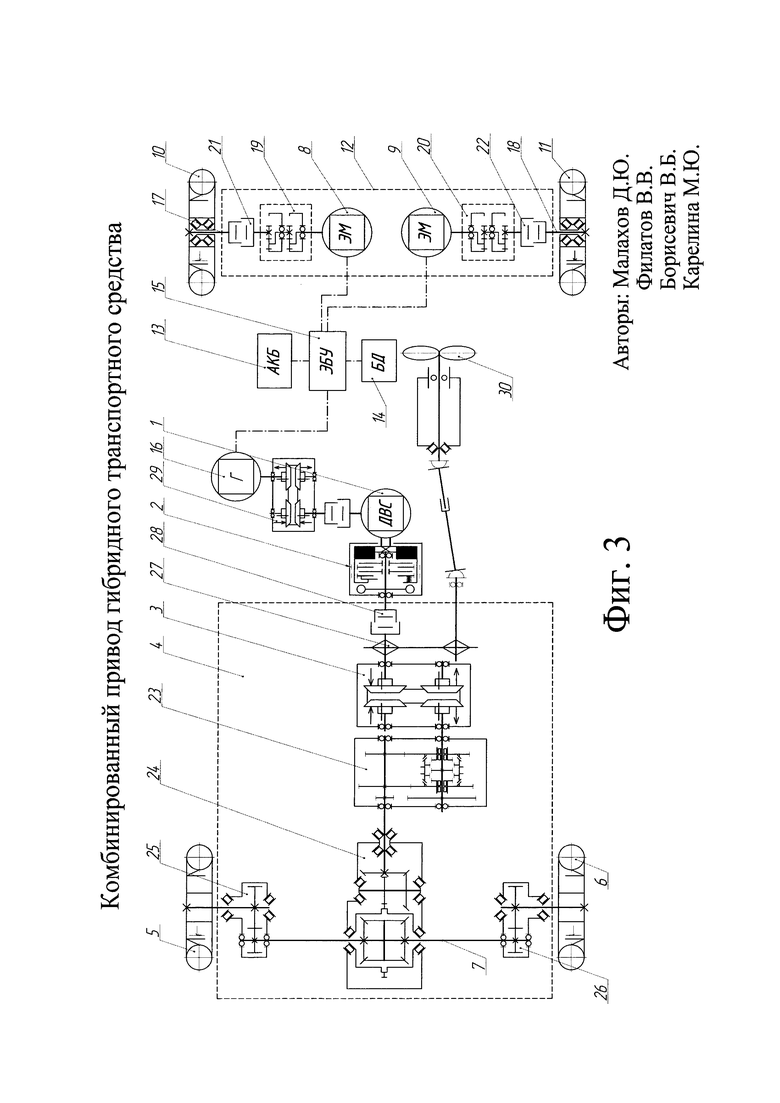
на фиг. 3 - частный случай выполнения комбинированного привода для амфибийного полноприводного четырехколесного гибридного транспортного средства.
На чертежах сплошными линиями обозначены механические связи элементов, штрихпунктирными линиями - электрические связи элементов.
Комбинированный привод (см. фиг. 1, 2 и 3) включает в себя двигатель 1 внутреннего сгорания (ДВС), связанный посредством сцепления 2 (СЦ), коробки 3 передач (КП) и блока 4 трансмиссии (БТ) с колесами 5 и 6 первой колесной оси 7, электрический привод в виде двух обратимых электромоторов 8 и 9 (ЭМ), связанных с колесами 10 и 11 второй колесной оси 12. В состав привода входят также аккумуляторный блок 13 (АКБ), подключенный к каждому из электромоторов 8 и 9, а также блок 14 датчиков (БД) и электронный блок 15 управления (ЭБУ), подключенный к электромоторам 8 и 9, аккумуляторному блоку 13 и блоку 14 датчиков. При этом комбинированный привод снабжен генератором 16 (Г), а вторая колесная ось 12 выполнена в виде двух автономных полуосей 17 и 18, на каждой из которых установлены электромоторы 8 и 9 (ЭМ), соответственно. Каждый из электромоторов 8 и 9 связан с соответствующими колесами 10 и 11 второй колесной оси 12 через дополнительные блоки 19 и 20 трансмиссии (БТ) и устройства 21 и 22 «включения/выключения». Генератор 16 подключен через электронный блок 15 управления к каждому из электромоторов 8 и 9 и имеет автоматически подключаемый синхронизированный привод от двигателя 1 внутреннего сгорания. Причем отношение номинальной мощности электромоторов 8 и 9 к номинальной мощности двигателя 1 внутреннего сгорания таково, что составляет не более 0,4, а отношение установочной мощности генератора 16 к номинальной мощности двигателя 1 внутреннего сгорания составляет не более 0,3.
Управление электромоторами 8 и 9, а также синхронизация их совместной работы с двигателем 1 внутреннего сгорания и генератором 16 на соответствующих режимах движения осуществляется электронным блоком 15 управления, который содержит, по меньшей мере, один контроллер, постоянно отслеживающий показания блока 14 датчиков, например, угловую скорость вращения колес, положение акселератора и т.п.
Электромоторы 8 и 9 комбинированного привода могут быть выполнены вентильными с жидкостным или воздушным охлаждением.
Блоки 4, 19, 20 трансмиссии могут быть дополнительно снабжены колесными цилиндрическими или планетарными редукторами (на фиг. 1 не показаны).
Синхронизированный привод генератора 16 от двигателя 1 внутреннего сгорания может осуществляться посредством автоматического центробежного конического вариатора (на фиг. 1 не показан).
В частном случае использования комбинированного привода для сухопутного полноприводного четырехколесного гибридного транспортного средства (см. фиг. 2) сцепление 2 может быть выполнено центробежным автоматическим, коробка 3 передач - в виде центробежного двухконусного вариатора, а блок 4 трансмиссии, в данном случае, включает в себя коробку 23 скоростей, обеспечивающую повышающую и понижающую передачи, главную передачу 24, содержащую одноступенчатый конический редуктор и дифференциал (на фиг. 2 не обозначены), колесные цилиндрические редукторы 25 и 26, а также элемент 27 отбора мощности и устройство 28 его «включения/выключения». Между двигателем 1 внутреннего сгорания и генератором 16 установлен автоматический центробежный конический вариатор 29, обеспечивающий функцию синхронизации. При этом блоки 19 и 20 трансмиссии выполнены в виде планетарных редукторов с устройствами 21 и 22 «включения/выключения».
В частном случае использования комбинированного привода для полноприводного четырехколесного гибридного транспортного средства в качестве амфибийного (см. фиг. 3) предусмотрена установка водоходного движителя 30, приводимого в движение двигателем 1 внутреннего сгорания через элемент 27 отбора мощности. В качестве водоходного движителя может использоваться, по меньшей мере, один гребной винт или один водомет.
Работа комбинированного привода гибридного транспортного средства обеспечивает пять основных режимов движения, которые осуществляются следующим образом на примере сухопутного полноприводного четырехколесного гибридного транспортного средства:
1. Режим движения «ДВС» с использованием только двигателя внутреннего сгорания независимо от электромоторов.
Движение транспортного средства обеспечивается за счет силового привода колес 5, 6 первой колесной оси 7 от двигателя 1 внутреннего сгорания при отключенных с помощью устройств 21 и 22 «включения/выключения» и не связанных с колесами 10 и 11 второй колесной оси 12 обратимых электромоторах 8 и 9. Передача и преобразование крутящего момента от двигателя 1 внутреннего сгорания к колесам 5, 6 первой колесной оси 7 осуществляется блоком 4 трансмиссии. Питание бортового электрооборудования осуществляется аккумуляторным блоком 13, а его подзарядка производится за счет генератора 16. Данный режим движения предназначен для нормальных дорожных условий при низком коэффициенте сопротивления движению.
2. Режим движения «ЭМ» с использованием только электромоторов независимо от двигателя внутреннего сгорания.
Движение транспортного средства обеспечивается за счет силового привода колес 10, 11 второй колесной оси 12 с автономными полуосями 17 и 18 от обратимых электромоторов 8 и 9 при выключенных сцеплении 2, двигателе 1 внутреннего сгорания и генераторе 16. Передача и преобразование крутящего момента от обратимых электромоторов 8 и 9 к колесам 10, 11 второй колесной оси 12 осуществляется дополнительными блоками 19 и 20 трансмиссии. Питание электромоторов 8 и 9 осуществляется аккумуляторным блоком 13, а координация работы всей электросистемы обеспечивается электронным блоком 15 управления. Продолжительность движения в данном режиме главным образом зависит от скорости движения, дорожных условий и емкости аккумуляторного блока 13. Максимальная скорость движения ограничена диапазоном регулирования обратимых электромоторов 8 и 9. Данный режим движения обеспечивает, главным образом, низкий уровень шумовой и тепловой заметности, создаваемый транспортным средством при перемещении, а также характеризуется нулевым расходом топлива и отсутствием выбросов отработанных газов в атмосферу, что способствует улучшению топливной экономичности и экологичности транспортного средства.
3. Режим движения «Г+ЭМ» с использованием генератора и электромоторов.
Движение транспортного средства обеспечивается за счет силового привода колес 10 и 11 второй колесной оси 12 с автономными полуосями 17 и 18 от обратимых электромоторов 8 и 9, а при нехватке электроэнергии для движения в автоматическом режиме включается двигатель 1 внутреннего сгорания, не связанный с колесами 5 и 6 первой колесной оси 7 (сцепление 2 в трансмиссии отключено) и приводящий в движение только генератор 16. При этом синхронизация оборотов ротора генератора 16 и выходного вала двигателя 1 внутреннего сгорания производится таким образом, что обеспечивается номинальная генерация электроэнергии во всем диапазоне работы двигателя 1 внутреннего сгорания. Передача и преобразование крутящего момента от обратимых электромоторов 8 и 9 к колесам 10 и 11 второй колесной оси 12 с автономными полуосями 17 и 18 осуществляется дополнительными блоками 19 и 20 трансмиссии. Питание электромоторов 8 и 9 осуществляется аккумуляторным блоком 13, а координация работы всей электросистемы обеспечивается электронным блоком 15 управления. Максимальная скорость движения ограничена диапазоном регулирования обратимых электромоторов 8 и 9. Данный режим характеризуется низким расходом топлива и уменьшением выбросов отработанных газов в атмосферу, что способствует улучшению топливной экономичности и экологичности транспортного средства.
4. Режим движения «ДВС+ЭМ» с использованием двигателя внутреннего сгорания и электромоторов.
Движение транспортного средства обеспечивается за счет совместного силового привода колес 5, 6 первой колесной оси 7 от двигателя 1 внутреннего сгорания и колес 10 и 11 второй колесной оси 12 с автономными полуосями 17 и 18 от обратимых электромоторов 8 и 9, соответственно, причем синхронизация совместной работы производится электронным блоком 15 управления, который регулирует режим работы обратимых электромоторов 8 и 9 в зависимости от режима работы двигателя 1 внутреннего сгорания. Передача и преобразование крутящего момента от двигателя 1 внутреннего сгорания к колесам 5 и 6 первой колесной оси 7 осуществляется блоком 4 трансмиссии, а от обратимых электромоторов 8 и 9 к колесам 10 и 11 второй колесной оси 12 с автономными полуосями 17 и 18 осуществляется дополнительными блоками 19 и 20 трансмиссии. Питание электромоторов 8 и 9 осуществляется аккумуляторным блоком 13, а его подзарядка производится за счет генератора 16. При достижении скорости, соответствующей максимальным оборотам обратимых электромоторов 8 и 9, устройства 21 и 22 «включения/выключения» автоматически размыкают их связь с колесами 10 и 11 второй колесной оси 12 с автономными полуосями 17 и 18. Данный режим обеспечивает движение в тяжелых дорожных условиях, буксировку тяжелых прицепов, а также интенсивный разгон на дорогах с хорошим покрытием.
5. Режим движения «ДВС+Г» с использованием двигателя внутреннего сгорания и генератора.
Движение транспортного средства обеспечивается за счет силового привода колес 5,6 первой колесной оси 7 от двигателя 1 внутреннего сгорания с генерацией электроэнергии за счет принудительного вращения обратимых электромоторов 8 и 9, связанных с колесами 10 и 11 второй колесной оси 12 с автономными полуосями 17 и 18 через дополнительные блоки 19 и 20 трансмиссии в дополнение к работающему генератору 16. Передача и преобразование крутящего момента от двигателя 1 внутреннего сгорания к колесам 5 и 6 первой колесной оси 7 осуществляется блоком 4 трансмиссии. При достижении скорости, соответствующей максимальным оборотам обратимых электромоторов 8 и 9, устройства 21 и 22 «включения/выключения» автоматически размыкают их связь с колесами 10 и 11 второй колесной оси 12 с автономными полуосями 17 и 18. Данный режим обеспечивает рекуперацию электрической мощности при движении и ускоренную зарядку аккумуляторного блока 13.
В случае, если комбинированный привод применен в конструкции амфибийного гибридного транспортного средства, как показано на фиг. 3, при выходе из строя основного водоходного движителя 30 или системы его управления в качестве запасного водоходного движителя могут быть применены колеса 5, 6 первой колесной оси 7 или колеса 10, 11 второй колесной оси 12 с автономными полуосями 17 и 18. Поворот при этом осуществляется разностью скоростей вращения колес 10 и 11 второй колесной оси 12 с автономными полуосями 17 и 18, приводимых в движение обратимыми электромоторами 8 и 9. Таким образом, обеспечивается дублирование водоходного движителя и системы его управления, что обуславливает повышенную надежность в случае амфибийного гибридного транспортного средства.
Представленный комбинированный привод гибридного транспортного средства обеспечивает высокие тягово-динамические характеристики в тяжелых дорожных условиях, высокие скоростные характеристики в нормальных дорожных условиях, достаточную скорость и запас хода в малошумном режиме движения за счет обратимых электромоторов 8 и 9 при выключенном двигателе 1 внутреннего сгорания, энергоэффективность и компактность электросистемы, повышенную топливную экономичность и экологичность, а также надежность с точки зрения сохранения мобильности при выходе из строя одного из приводов.
Электронный блок 15 управления содержащий, по меньшей мере, один контроллер, постоянно отслеживающий показания блока 14 датчиков, обеспечивает энергоэффективность электросистемы, а также синхронизацию работы двигателя 1 внутреннего сгорания, генератора 16 и электромоторов 8 и 9.
Вентильные электромоторы 8 и 9 с воздушным охлаждением являются компактными, а при использовании закрытой системы жидкостного охлаждения электромоторов 8 и 9 возможна реализация комбинированного привода для амфибийных машин.
Блоки 4, 19, 20 трансмиссии, снабженные колесными цилиндрическими или планетарными редукторами 25, 26, обеспечивают больший диапазон изменения передаточных отношений трансмиссии, что позволяет улучшить эффективность комбинированного привода в целом, а также повысить дорожный просвет транспортного средства.
Двигатель 1 внутреннего сгорания, связанный с генератором 16 через автоматический центробежный вариатор 29, синхронизирующий обороты ротора генератора 16 и выходного вала двигателя 1 внутреннего сгорания, позволяет повысить энергоэффективность комбинированного привода.
Таким образом, изобретение позволяет расширить функциональные возможности транспортного средства за счет реализации двигателя внутреннего сгорания в качестве независимого от электрического приводного устройства при обеспечении энергоэффективности и компактности комбинированного привода гибридного транспортного средства в целом.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРЕХОСНЫЙ АВТОМОБИЛЬ С КОМБИНИРОВАННОЙ ЭНЕРГЕТИЧЕСКОЙ УСТАНОВКОЙ | 2013 |
|
RU2537931C1 |
| ГИБРИДНЫЙ СИЛОВОЙ АГРЕГАТ КОЛЕСНОГО ТРАНСПОРТНОГО СРЕДСТВА (ВАРИАНТЫ) | 2016 |
|
RU2658243C2 |
| КОМБИНИРОВАННАЯ ЭНЕРГЕТИЧЕСКАЯ УСТАНОВКА ГИБРИДНОГО АВТОМОБИЛЯ | 2010 |
|
RU2457959C2 |
| ГИБРИДНЫЙ СИЛОВОЙ АГРЕГАТ ТРАНСПОРТНОГО СРЕДСТВА (ВАРИАНТЫ) | 2011 |
|
RU2464182C2 |
| Наземный транспортный комплекс с бортовой самоходной эвакокапсулой | 2015 |
|
RU2617016C1 |
| КОМБИНИРОВАННАЯ ДВИГАТЕЛЬНАЯ УСТАНОВКА | 2007 |
|
RU2334891C1 |
| Способ накопления и стабилизации вырабатываемого напряжения бесколлекторным генератором в составе гибридной силовой установки | 2018 |
|
RU2708118C1 |
| ПЛАВАЮЩАЯ ТРАНСПОРТНАЯ ПЛАТФОРМА | 2019 |
|
RU2708497C1 |
| Самоходная машина (варианты) | 2023 |
|
RU2841418C1 |
| СКОРОСТНОЙ ТУРБОЭЛЕКТРИЧЕСКИЙ ВЕРТОЛЕТ | 2013 |
|
RU2521090C1 |
Изобретение относится к транспортному машиностроению. Комбинированный привод гибридного транспортного средства содержит двигатель внутреннего сгорания, связанный посредством сцепления, коробки передач и блока трансмиссии с первой колесной осью, один из двух обратимых электромоторов связан со второй осью. Комбинированный привод снабжен генератором, а вторая колесная ось выполнена в виде двух автономных полуосей, на которых установлены соответствующие электромоторы, связанные с колесами через дополнительные блоки трансмиссии и устройства «включения/выключения». Генератор подключен через электронный блок управления к каждому из электромоторов и имеет автоматически подключаемый синхронизированный привод от двигателя. Отношение мощности электромоторов к мощности двигателя составляет не более 0,4. Отношение установочной мощности генератора к номинальной мощности двигателя - не более 0,3. Расширяются функциональные возможности привода. 4 з.п. ф-лы, 3 ил.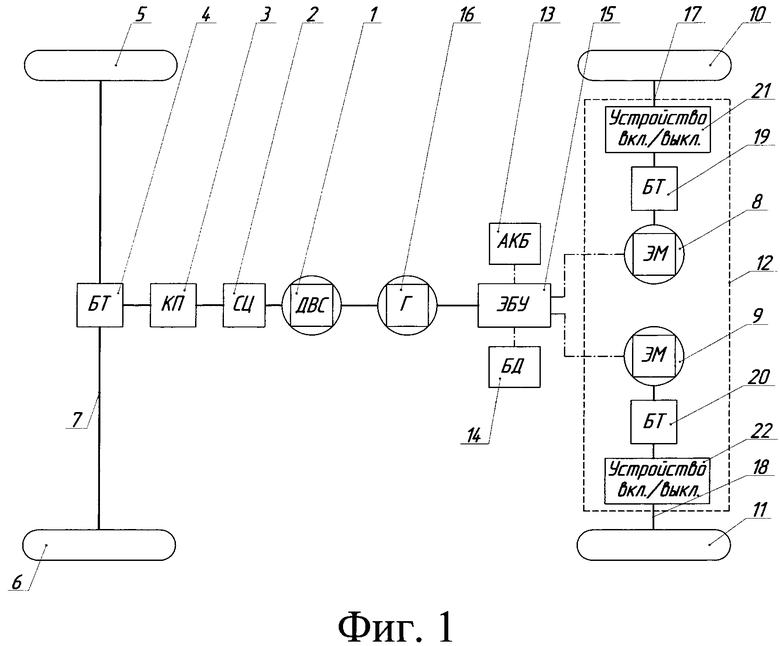
1. Комбинированный привод гибридного транспортного средства, содержащий двигатель внутреннего сгорания, связанный посредством сцепления, коробки передач и блока трансмиссии с первой колесной осью, электрический привод в виде двух обратимых электромоторов, из которых, по меньшей мере, один связан со второй колесной осью, а также аккумуляторный блок, подключенный к электромоторам, блок датчиков и электронный блок управления, подключенный к электромоторам, аккумуляторному блоку и блоку датчиков, отличающийся тем, что комбинированный привод снабжен генератором, а вторая колесная ось выполнена в виде двух автономных полуосей, на которых установлены соответствующие электромоторы, связанные с колесами через дополнительные блоки трансмиссии и устройства «включения/выключения», при этом генератор подключен через электронный блок управления к каждому из электромоторов и имеет автоматически подключаемый синхронизированный привод от двигателя внутреннего сгорания, причем отношение номинальной мощности электромоторов к номинальной мощности двигателя внутреннего сгорания составляет не более 0,4, а отношение установочной мощности генератора к номинальной мощности двигателя внутреннего сгорания составляет не более 0,3.
2. Привод по п. 1, отличающийся тем, что электронный блок управления содержит, по меньшей мере, один контроллер, постоянно отслеживающий показания блока датчиков.
3. Привод по п. 1, отличающийся тем, что электромоторы выполнены вентильными с жидкостным или воздушным охлаждением.
4. Привод по п. 1, отличающийся тем, что каждый блок трансмиссии дополнительно снабжен колесными цилиндрическими или планетарными редукторами.
5. Привод по п. 1, отличающийся тем, что двигатель внутреннего сгорания связан с генератором через автоматический центробежный конический вариатор.
| КОМБИНИРОВАННАЯ ЭНЕРГЕТИЧЕСКАЯ УСТАНОВКА ГИБРИДНОГО АВТОМОБИЛЯ | 2010 |
|
RU2457959C2 |
| Способ получения N1-(4-метилбензосульфонил)-N2-н-бутилмочевины (бутамида) из п-толуолсульфамида | 1959 |
|
SU128015A1 |
| КОМБИНИРОВАННЫЙ СИЛОВОЙ ЭНЕРГЕТИЧЕСКИЙ АГРЕГАТ ДЛЯ АВТОМОБИЛЯ И ТРАКТОРА С ЭЛЕКТРОТРАНСМИССИЕЙ И МОТОР-КОЛЕСАМИ (ВАРИАНТЫ) | 2001 |
|
RU2184040C1 |
| US 2004050598 A1, 18.03.2004 | |||
| Способ определения оптимальных режимов резания | 1987 |
|
SU1433641A1 |

