Область техники
Настоящее изобретение относится погрузочно-разгрузочной технике, а именно к устройствам управления контейнером, таким как спредеры, и предназначено для захвата, удержания и перемещения контейнеров, а также выгрузки контейнеров, перевозящих сыпучие грузы, в частности, контейнеров с нижней выгрузкой (выгрузкой вниз).
Уровень техники
Известны устройства для захвата и перемещения контейнеров, в том числе крупнотоннажных контейнеров ISO, называемые спредерами. Спредеры могут обеспечивать выполнение дополнительных операций, таких как открытие крышки (люка) контейнера для доступа к его содержимому и выгрузки контейнера посредством его переворота вокруг горизонтальной оси, проходящей по существу параллельно длинной стороне контейнера, или путем наклона контейнера.
Так, в заявке WO2013006141 описан спредер, осуществляющий захват и перемещение контейнера, дополнительно содержащий устройство зацепления крышки верхней крышки, включающее, в свою очередь, твистлоки и механизмы вертикального перемещения твистлоков. Твистлоки входят в зацепление с выступами на крышке, расположенной сверху контейнера, и последующее вертикальное перемещение твистлоков в верхнее положение позволяет поднять крышку. Данный спредер не осуществляет переворот контейнера; эта функция выполняется другим устройством, либо контейнер разгружается захватом его содержимого еще одним, дополнительным устройством. Очевидно, что скорость выгрузки такого контейнера низкая, а кроме того, требует использования дополнительных устройств и, соответственно, дополнительного пространства.
Из заявок AU2017201522, WO2017196260 известны спредеры, которые помимо захвата и подъема крышки, расположенной сверху контейнера, осуществляют еще и переворот контейнера, что ускоряет выгрузку контейнера. Для этого известные спредеры содержат механизмы поворота контейнера вокруг горизонтальной оси, по существу параллельной длинной стороне контейнера. Такой спредер ускоряет выгрузку контейнера и не требует применения дополнительных устройств или ручных операций.
Из патента RU2667206 известен спредер осуществляющий, кроме захвата и удержания контейнера, его выгрузку путем наклона контейнера вокруг горизонтальной оси, по существу параллельной короткой стороне контейнера, и ссыпки груза через люк (дверь) расположенный на торце контейнера. В известных спредерах этого типа операция отпирания и запирания люка (двери) реализована не механизмами спредера, а выполняется вручную, что замедляет скорость работы.
Известные технические решения, используемые для выгрузки и реализованные в известных спредерах, включая перечисленные выше, имеют следующие существенные недостатки.
Прежде всего, накладываются повышенные требования к жесткости и прочности конструкции спредера, а также усложняется его конструкция, поскольку требуются дополнительные усиливающие элементы и элементы удержания контейнера в частично или полностью повернутом (наклонном) состоянии. Использование стандартных для контейнерной индустрии механизмов захвата и удержания контейнера (твистлоков) также неочевидно, поскольку все они рассчитаны на нагрузки вдоль продольной оси твистлока и не предусматривают нагрузок на изгиб (излом).
Также накладываются повышенные требования к жесткости и прочности конструкции контейнера. Требования Международной конвенции по безопасным контейнерам (КБК) (Женева, 2 декабря 1972 г.) и соответствующих стандартов ISO не содержат нормативов, а также методов испытаний на нагрузки фитингов и рамы (кузова) контейнера для его наклона или переворота. Это может привести к необходимости трудоемкого и долгого создания и утверждения таких нормативов и методов испытаний или, в случае их отсутствия, ограничениям на применение таких контейнеров.
Также не существует универсальных спредеров, которые можно было бы применять для обслуживаемых контейнеров разных размеров и разного положения центров массы груза контейнеров. При изменении высоты контейнера и/или переходе на груз с иной насыпной плотностью и соответственно центром масс в контейнере часто требуется изготовить и применять другой спредер.
Еще одним недостатком указанных известных спредеров является их ограниченная функциональность при работе с новыми контейнерами, выгрузка из которых осуществляется снизу, а не через верхнюю крышку или люк (дверь) в торце. Примером такого нового контейнера является контейнер согласно патенту РФ RU2673991. Его особенностью является размещение в нижней части корпуса контейнера открываемых и фиксируемых люков (створок) для выгрузки груза вниз, или нижней выгрузки. Используя известные спредеры, разблокировка, открытие, закрытие и блокировка расположенных внизу контейнера створок потребует либо применения дополнительного оборудования, либо, что более вероятно на данный момент, применения рабочей силы, что влечет за собой известные сложности.
Таким образом, существует задача по созданию спредера, способного управлять указанными контейнерами с нижней выгрузкой, позволяющего не только захватывать, удерживать и перемещать контейнеры с нижней выгрузкой, но и управлять люками таких контейнеров, а именно, обеспечивать разблокировку, открытие, закрытие и блокировку люков. В этом смысле спредер согласно настоящему изобретению также может быть назван устройством управления контейнером, поскольку обеспечивает выполнение дополнительных функций, обычно не присущих спредерам, известным из уровня техники. В рамках данной заявки понятия «спредер» и «устройство управления контейнером» следует рассматривать как эквивалентные.
Раскрытие сущности изобретения
Настоящее изобретение направлено на устранение недостатков известных спредеров и создание устройства управления контейнером, позволяющего захватывать, удерживать и перемещать контейнеры, а также управлять люками (створками) контейнеров с нижней выгрузкой, в том числе в полностью автоматическом режиме, используя только механизмы такого устройства, именуемого дальше также спредером.
Заявленный спредер выполняет по крайней мере следующие основные функции:
- захват и удержание любого контейнера, в том числе стандартного контейнера стандарта ISO, например, размерностью 20 футов, для его перемещения;
- управление люками (створками) контейнеров с нижней выгрузкой. В общем случае с люками контейнера с нижней выгрузкой могут осуществляться следующие операции: разблокировка, открытие, закрытие, блокировка люков. Люки приводятся в движение тягами; один конец тяг закреплен на люке, а второй конец тяг выведен, предпочтительно, в верхнюю часть контейнера и может через подходящий для этих целей соединительный элемент (в частности, стандартный контейнерный фитинг) присоединяться к исполнительному механизму на спредере для выполнения этих операций.
Указанные функции могут выполняться заявленным спредером при изменении в широком диапазоне высоты контейнера, размеров и формы люков, характеристик груза, распределения груза в контейнере и др.
Для разблокировки, открытия, закрытия и блокировки люков их перемещают, воздействуя на тяги. При этом величина перемещения тяг может быть значительной и превышать 1,7 метра. При общеизвестном подходе, т.е. когда исполнительные механизмы располагаются вертикально вдоль боковых сторон спредера, спредер получится достаточно высоким, до 2 и более метров в высоту, что по многим причинам является нежелательным.
Таким образом, еще одной задачей, решаемой настоящим изобретением, является обеспечение компактности конструкции предлагаемого спредера, прежде всего по его высоте.
Наконец, еще одна возможность, предусмотренная в конструкции заявляемого спредера, – это возможность эксплуатации двух спредеров одновременно путем их подвешивания на специальную траверсу, что вдвое увеличит производительность работы. Конструкция спредера этому никак не препятствует благодаря компоновке его элементов конструкции и соответствующему подбору используемых в заявленном спредере элементов конструкции.
Техническими результатами настоящего изобретения являются расширение арсенала технических средств, используемых для захвата, удержания и перемещения контейнеров, а также управления контейнерами для их выгрузки, обеспечение возможности выгрузки контейнеров с нижней выгрузкой, автоматизация, упрощение и ускорение процесса выгрузки таких контейнеров.
Поставленные задачи решаются, а заявленные технические результаты достигаются в устройстве управления контейнером, или спредере, содержащем раму с установленными на ней стандартными средствами зацепления контейнера, например твистлоками, служащими для захвата и удержания контейнера, силовым приводом, подвижным механизмом зацепления с дополнительными средствами зацепления, и средствами передачи усилия, соединяющими силовой привод и подвижный механизм зацепления. Силовой привод и средства передачи усилия могут быть размещены по существу вдоль длинных сторон рамы, а подвижный механизм зацепления размещен по существу на коротких сторонах рамы. При этом силовой привод выполнен с возможностью придания подвижному механизму зацепления возвратно-поступательного движения преимущественно в направлении, перпендикулярном плоскости рамы, т.е. в вертикальном направлении, в том числе с выходом за габариты (контур, нижнюю плоскость рамы) спредера.
Заявленное устройство управления контейнером может использоваться с любыми известными контейнерами и предназначено, в том числе, для автоматизированного управления контейнером с нижней выгрузкой, в частности, известного из патента РФ RU2673991.
В части удержания и перемещения контейнера спредер не отличается от большинства аналогов и включает силовую раму с размещенными на ней твистлоками, средствами их силового привода (гидравлическими или электрическими), а также соответствующее устройство управления, сигнализации и связи с оператором.
В части управления люками контейнера спредер оснащен, прежде всего, специальным устройством управления люками контейнера для захвата и удержания тяг управления люками. Это устройство – подвижный механизм зацепления – содержит дополнительное средство зацепления (например, твистлок) для соединения с тягами люков контейнера и может перемещаться относительно спредера в плоскости, параллельной торцевым стенкам контейнера, на расстояние, превышающее высоту спредера, для чего подвижный механизм зацепления через гибкую силовую связь (трос, цепь) прикреплен к силовому приводу.
Силовой привод может быть выполнен как электромотор и гидропривод, при необходимости – с редуктором. Силовой привод может располагаться непосредственно над подвижным механизмом зацепления в торцевой раме спредера или в середине спредера. Предпочтительно, силовой привод через передающее усилие устройство (например, поворотный блок) соединен с расположенным ближе к середине спредера линейным силовым механизмом (например, гидроцилиндром), усилие от которого передается на трос (или цепь), соединенный с подвижным механизмом зацепления.
За счет использования средств передачи усилия, которые преобразуют возвратно-поступательное движение от силового привода преимущественно в горизонтальной плоскости (плоскости рамы, параллельно длинной стороне контейнера) в возвратно-поступательное движение подвижного механизма зацепления преимущественно в вертикальной плоскости (перпендикулярно плоскости рамы, перпендикулярно длинной стороне контейнера), удалось достичь небольшой высоты заявленного спредера, а также без дополнительных устройств обеспечить передачу усилия, требуемого для управления люками контейнера с нижней выгрузкой, в том числе когда люки находятся под высокой нагрузкой. Дополнительное обеспечение спредера силовым приводом, средствами передачи усилия и подвижным механизмом зацепления, очевидно, позволяет полностью автоматизировать процесс управления контейнером с нижней выгрузкой, исключить необходимость применения рабочей силы и, как следствие, ускорить процесс выгрузки такого контейнера.
Поставленные задачи решаются, а заявленные технические результаты достигаются также в предпочтительных вариантах исполнения устройства управления контейнером, согласно которым:
- спредер содержит фитинги, размещенные на раме для установки или подвешивания спредера на крановое оборудование, непосредственно или через промежуточную раму (траверсу);
- силовой привод является гидравлическим приводом и включает по меньшей мере один гидроцилиндр, при этом гидравлический привод может быть расположен по существу в средней части рамы;
- спредер дополнительно содержит блок управления для управления силовым приводом и/или твистлоками для установки в фитинги контейнера;
- блок управления содержит устройство создания давления для гидравлического привода. Альтернативно блок управления может содержать средства подвода давления для гидравлического привода, например, от кранового оборудования;
- средства передачи усилия могут являться тросово-блочным механизмом, причем предпочтительно, если тросово-блочный механизм содержит полиспаст;
- подвижный механизм зацепления содержит поворотный механизм, а дополнительные средства зацепления представляют собой твистлок, входящий в зацепление с ответной частью контейнера.
Далее изобретение и его преимущества над известными аналогами будет подробно описано со ссылками на приложенные чертежи.
Краткое описание чертежей
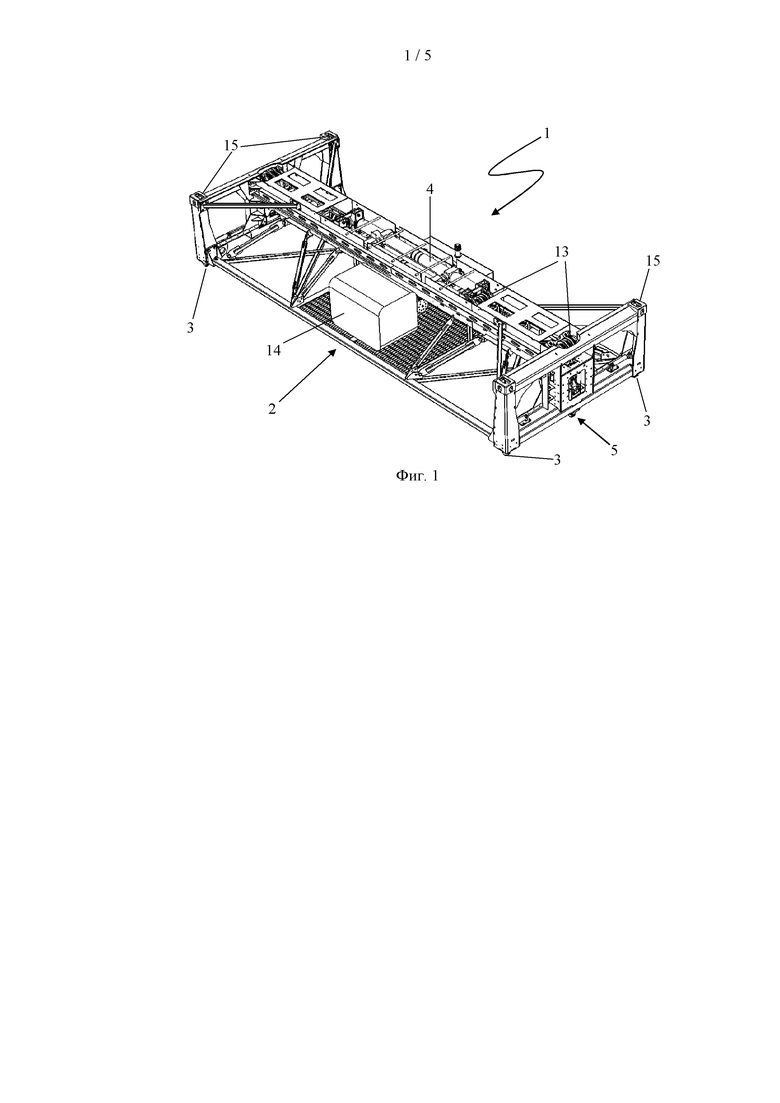
На фиг. 1 показано устройство управления контейнером согласно изобретению.
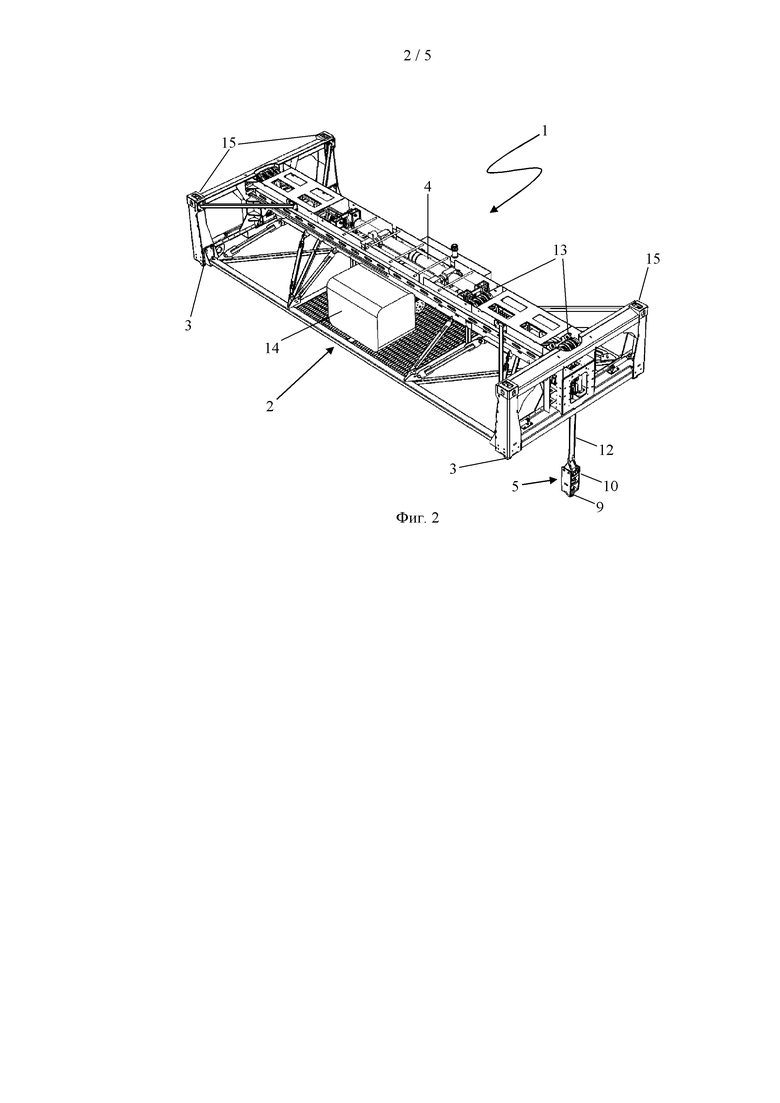
На фиг. 2 показано устройство управления контейнером согласно изобретению с выдвинутым подвижным механизмом зацепления.
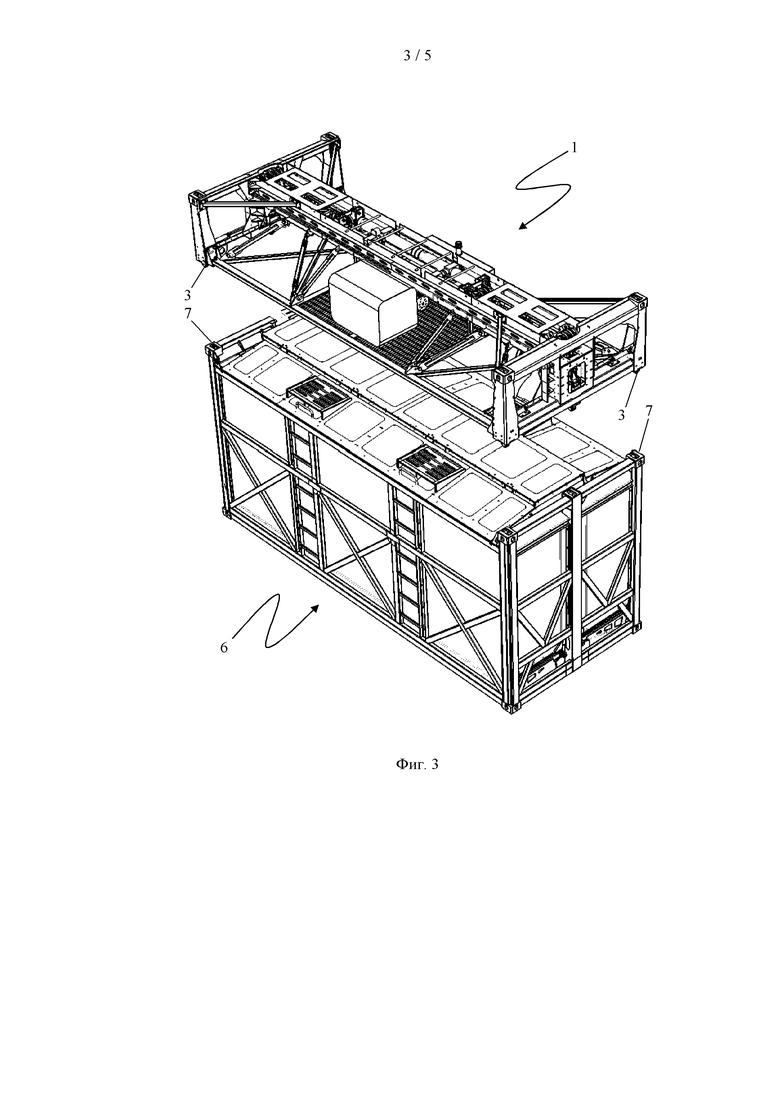
На фиг. 3 схематично показана установка устройства управления контейнером на контейнер.
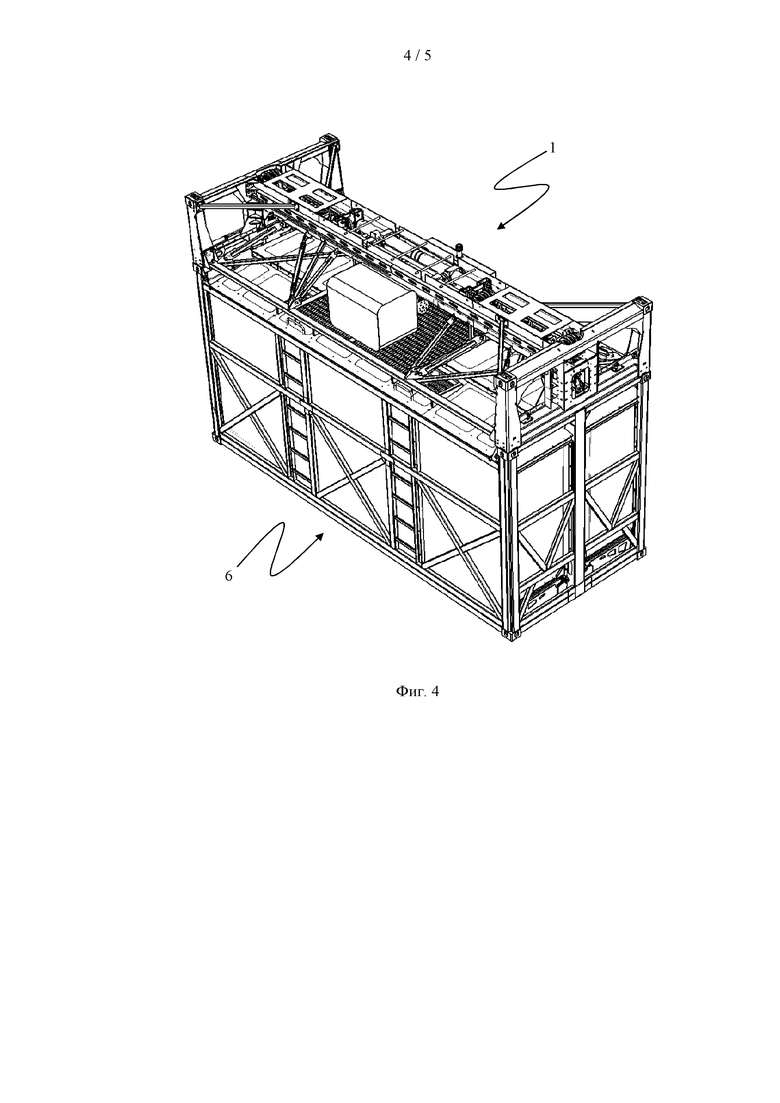
На фиг. 4 показано устройство управления контейнером, установленное на контейнер.
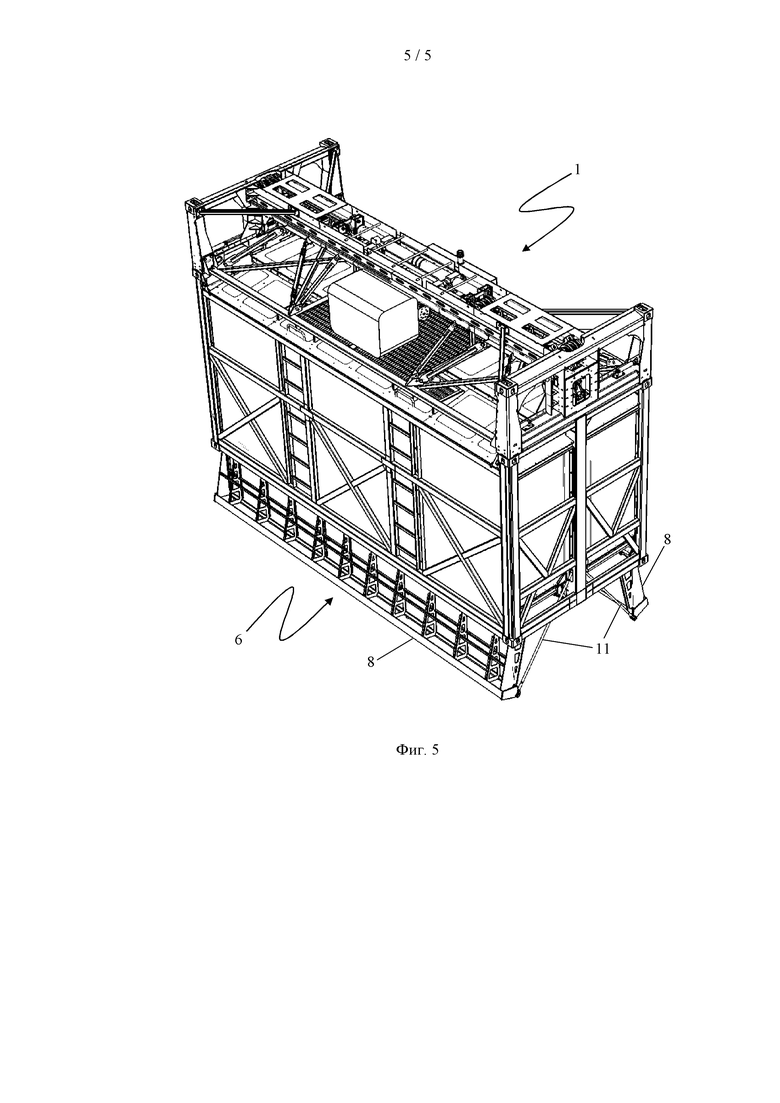
На фиг. 5 схематично показано управление люками контейнера с использованием устройства управления контейнером.
Осуществление изобретения
Заявленное устройство управления контейнером, или спредер 1, схематично показано на фиг. 1, 2 и включает раму 2 с установленными на ней твистлоками 3, силовым приводом 4, подвижным механизмом 5 зацепления и средствами передачи усилия, соединяющими силовой привод 4 и подвижный механизм зацепления 5.
Как и в известных спредерах и других средствах перемещения контейнеров, твистлоки 3 служат для зацепления и удержания контейнера 6, входя в соответствующие фитинги 7 контейнера, размещенные на верхней части контейнера 6 (фиг. 3). Для удобства совмещения твистлоков 3 с фитингами 7 контейнера на раме 2 могут быть дополнительно установлены направляющие (на фигурах не показаны).
Силовой привод 4 предназначен для перемещения подвижного механизма 5 зацепления и, соответственно, управления люками контейнера 6, как будет описано далее. Силовой привод 4 может представлять собой любой известный силовой привод, например, электрический, магнитный, гидравлический и т.п. Учитывая высокие требования, предъявляемые к устройствам управления контейнером, такие как обеспечиваемая мощность и надежность, силовой привод 4, предпочтительно, выполняют в виде гидропривода. В этом случае силовой привод 4 может включать один или более гидроцилиндров в зависимости от той мощности, которую он должен обеспечивать, а также габаритных размеров контейнеров, управление которыми осуществляется посредством заявленного спредера 1.
Предпочтительно, если силовой привод 4 располагается по существу вдоль (параллельно или близко к параллельному положению) длинных сторон рамы 2, как это показано на фиг. 1, 2, и, соответственно, вдоль длинных сторон контейнера 1, или горизонтально. Во-первых, это обеспечивает компактность конструкции заявленного устройства управления контейнером. Во-вторых, такое расположение силового привода 4 позволяет сделать его размерами больше, чем если бы силовой привод 4 располагался, например, вертикально на торцевых сторонах спредера 1. А большой размер силового привода 4 означает и более высокую мощность, которую он может обеспечить, что также повышает его надежность. Кроме того, целесообразно размещать силовой привод 4 по существу в средней части рамы 2, как показано на фиг. 1, 2, чтобы обеспечить лучший баланс спредера 1 и достаточное место для размещения на раме 2 средств передачи усилия.
Подвижный механизм 5 зацепления выполнен с возможностью вхождения в зацепление с соответствующими средствами управления люками, управляющими положением люков 8 контейнера 6 (фиг. 5). Для этого подвижный механизм 5 зацепления может содержать, например, дополнительный твистлок 9 и, предпочтительно, поворотный механизм 10 (фиг. 2) для поворота указанного дополнительного твистлока 9, когда дополнительный твистлок 9 совмещен со средствами управления люками 8 для взаимной фиксации дополнительного твистлока 9 с указанными средствами управления люками 8.
Указанными средствами управления люками 8 могут являться тяги 11, первые концы которых соединены с соответствующим люком 8, а вторые концы входят в зацепление с подвижным механизмом 5 зацепления. Такое зацепление может осуществляться, например, посредством дополнительного твистлока 9 и ответного фитинга (на фигурах не показан), размещенного на указанных вторых концах тяг 11.
Подвижный механизм 5 зацепления располагается на коротких, или торцевых, сторонах рамы 2. Это позволяет размещать его максимально близко к средствам управления люками контейнера 6.
Поскольку направления перемещения силового привода 4 и подвижного механизма 5 зацепления по существу взаимно перпендикулярны, средства передачи усилия, соединяющие силовой привод 4 и подвижный механизм 5 зацепления, должны обеспечивать смену направления приложения усилия. Для этого средства передачи усилия могут быть выполнены любым известным специалисту способом, например, являться тросово-блочным механизмом.
Для примера на фиг. 1 приведен вариант исполнения средств передачи усилия в виде тросово-блочного механизма, включающего по меньшей мере тросы 12 (или цепи, или другие подходящие средства) и роликовые механизмы 13 (или блоки). Тросы 12 одними своими концами соединены с силовым приводом 4, а другими – с подвижным механизмом 5 зацепления, а роликовые механизмы 13 используются для указанного изменения направления перемещения. Дополнительно, особенно для работы с большим, сильно нагруженным контейнером 6, тросово-блочный механизм может также содержать полиспаст (на фигурах не показан), который позволяет или увеличить передаваемое усилие, или, что предпочтительнее, увеличить ход подвижного механизма 5 зацепления (при использовании обратного полиспаста).
Таким образом, согласно изобретению подвижный механизм 5 зацепления по существу перемещается в вертикальном направлении, перпендикулярном плоскости рамы 2, входит в зацепление с ответными средствами управления люками и передает усилие от силового привода 4 на люки 8 контейнера 6. Для удобства изображения, на фиг. 2 подвижный механизм 5 зацепления показан в выдвинутом положении, выходя за границу нижней плоскости рамы 2. Такое положение подвижного механизма 5 зацепления может соответствовать максимальному открытию люков 8. Понятно, что подвижный механизм 5 зацепления может подниматься и выше нижней плоскости рамы 2, как показано на фиг. 1, например, при закрытии люков 8.
Кроме того, средства передачи усилия могут обеспечивать передачу от силового привода 4 не только возвратно-поступательного движения подвижному механизму 5 зацепления, но также усилия поворотному механизму 10 с целью обеспечения вращательного движения дополнительного твистлока 9 для его зацепления с ответным фитингом на вторых концах тяг 11. Альтернативно, поворотный механизм 10 может сам являться приводом, обеспечивающим вращательное движение твистлока 9. В любом случае это позволяет полностью автоматизировать процесс управления люками 8 контейнера 6.
На раме 2 может дополнительно размещаться блок 14 управления силовым приводом 4, а также приводами твистлоков 3 для захвата и удержания контейнера 6. В частности, если силовой привод 4 является электрическим или магнитным, блок 14 управления может быть электрическим генератором или, например, распределительным щитом, к которому подводится электропитание извне. Если же силовой привод 4 является гидравлическим, блок 14 управления может содержать устройство создания давления для гидравлического привода или же просто содержать средства подвода давления для гидравлического привода извне, например, от внешнего компрессора. Кроме того, собственно блок 14 управления или другое дополнительное устройство может содержать электронные системы контроля, диагностики, управления спредером 1, связи с оператором или другим внешним оборудованием.
Аналогично силовому приводу 4, предпочтительно, чтобы средства передачи усилия располагались по существу вдоль (параллельно или близко к параллельному положению) длинных сторон рамы 2 и, соответственно, вдоль длинных сторон контейнера 6, или горизонтально. Это обеспечивает компактность спредера 1, а также позволяет передавать большую мощность (усилие) на люки 8 и обеспечивает надежность заявленного устройства управления контейнером.
Заявленное устройство управления контейнером подвешивают любым известным способом непосредственно на кране или ином известном устройстве для подъема и перемещения грузов, например, за дополнительные твистлоки 15.
Заявленное устройство управления контейнером работает следующим образом.
Спредер 1 подвешивают (устанавливают) на кране или ином известном устройстве для подъема и перемещения грузов, например, за раму 2 или дополнительные твистлоки 15.
Далее спредер 1 перемещают к контейнеру 6 (фиг. 3) и опускают на контейнер 6 (фиг. 4). Твистлоки 3 входят в зацепление с фитингами 7 верхней части контейнера 6, и их зацепление фиксируется, например, поворотом твистлоков 3 посредством поворотного механизма 10.
После указанной фиксации зацепления твистлоков 3 с фитингами 7, кран или устройство для подъема и перемещения грузов может перемещать спредер 1 и присоединенный к нему контейнер 6.
Для открытия и закрытия люков 8 контейнера 6, например, при выгрузке контейнера 6, подвижный механизм 5 зацепления посредством силового привода 4 и средств передачи усилия перемещают к ответным средствам управления люками и приводят их во взаимное зацепление. Дальнейшее перемещение подвижного механизма 5 зацепления вызывает перемещение ответных средств управления люками и, соответственно, самих люков 8.
Например, подвижный механизм 5 зацепления содержит поворотный механизм 10 и дополнительный твистлок 9, а ответные средства управления люками – ответный фитинг (на фигурах не показан) и тяги 11, соединяющие ответный фитинг и люки 8 как было описано выше. Силовой привод 4 через средства передачи усилия (например, включающие тросы 12 и роликовые механизмы 13) перемещает подвижный механизм 5 зацепления к ответному фитингу, так что дополнительный твистлок 9 входит в ответный фитинг. Далее поворотный механизм 10 приводит во вращение дополнительный твистлок 9 (например, посредством встроенного привода, или при передаче соответствующего усилия от силового привода 4, или вручную), так что дополнительный твистлок 9 входит в зацепление с ответным фитингом. После этого перемещение подвижного механизма 5 зацепления вверх или вниз вызывает аналогичное перемещение ответного фитинга, а через него и соответствующее перемещение вверх или вниз тяг 11, которые управляют открытием и закрытием люков 8.
Следует отметить, что для открытия люков 8 может потребоваться как просто однонаправленное перемещения тяг 11 вниз, так и более сложное движение, например, сначала небольшое смещение тяг 11 вверх, а потом более длинное смещение вниз. Такое двухступенчатое перемещение тяг 11 может потребоваться, например, когда люки 8 для их разблокировки необходимо сначала немного приподнять, и только после этого люки 8 могут быть открыты перемещением тяг 11 вниз. Очевидно, что с помощью силового привода 4 и/или блока 14 управления можно реализовать любой алгоритм перемещения подвижного механизма 5 зацепления, требуемый для разблокировки, открытия, закрытия и блокировки люков 8.
Более того, посредством силового привода 4 и/или блока 14 управления можно также реализовать дополнительные или сервисные функции, такие как очистку люков 8 или всего контейнера 6, например, посредством придания им низкочастотного колебания, что легко реализуется известными специалисту способами при использовании заявленного устройства управления контейнером.
Таким образом, заявленное устройство управления контейнером позволяет существенно расширить функционал известных спредеров, используемых для захвата, удержания, перемещения и выгрузки контейнеров, обеспечивает возможность выгрузки контейнера с нижней выгрузкой, а также автоматизацию, упрощение и ускорение процесса выгрузки такого контейнера.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОНТЕЙНЕР И СПОСОБ ВЫГРУЗКИ КОНТЕЙНЕРА | 2017 |
|
RU2673991C1 |
| КОНТЕЙНЕР С КРЫШКОЙ, УСТРОЙСТВО И СПОСОБ УПРАВЛЕНИЯ КРЫШКОЙ УКАЗАННОГО КОНТЕЙНЕРА | 2017 |
|
RU2674709C2 |
| СПОСОБ УСТАНОВКИ КОНТЕЙНЕРОВ ДЛЯ ПЕРЕВОЗКИ ЖЕЛЕЗНОДОРОЖНЫМ ТРАНСПОРТОМ | 2016 |
|
RU2644056C1 |
| СПРЕДЕР НАКЛОННЫЙ ДЛЯ КОНТЕЙНЕРОВ | 2017 |
|
RU2667206C1 |
| СПОСОБ ПЕРЕГРУЗКИ КОНТЕЙНЕРОВ | 2018 |
|
RU2703365C1 |
| СПОСОБ ПРИЧАЛИВАНИЯ ДИРИЖАБЛЯ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2024 |
|
RU2840302C1 |
| УНИВЕРСАЛЬНЫЙ КОНТЕЙНЕР ДЛЯ ПЕРЕВОЗКИ ТАРНО-ШТУЧНЫХ И СЫПУЧИХ ГРУЗОВ | 2017 |
|
RU2664089C1 |
| Устройство для кантования контейнеров | 1978 |
|
SU740668A1 |
| Устройство для погрузки на судно и выгрузки группы контейнеров | 1979 |
|
SU887351A1 |
| Контейнер для сыпучих и наливных грузов | 1990 |
|
SU1761632A1 |
Изобретение относится к устройствам управления контейнером, таким как спредеры. Спредер (1) включает раму (2) с установленными на ней твистлоками (3), силовым приводом (4), подвижным механизмом (5) зацепления и средствами передачи усилия, соединяющими силовой привод (4) и подвижный механизм (5) зацепления. Силовой привод (4) и средства передачи усилия размещены по существу вдоль длинных сторон рамы 2, а подвижный механизм (5) зацепления размещен по существу на коротких сторонах рамы 2. Силовой привод (4) обеспечивает подвижному механизму (5) зацепления возвратно-поступательное движение преимущественно в направлении, перпендикулярном плоскости рамы (2). Достигается расширение функциональных устройств, используемых для захвата, удержания, перемещения и выгрузки контейнеров, обеспечение возможности выгрузки контейнера с нижней выгрузкой, а также автоматизации, упрощение и ускорение процесса выгрузки такого контейнера. 8 з.п. ф-лы, 5 ил.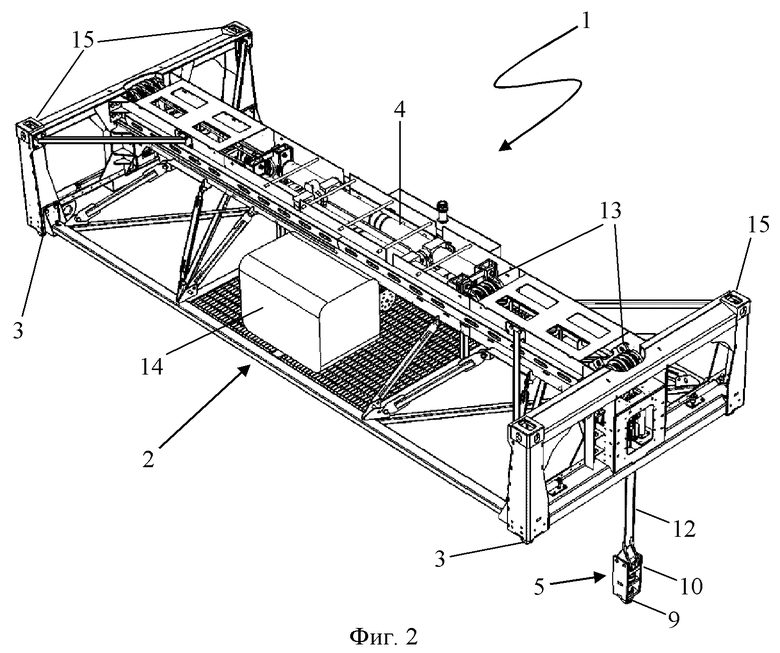
1. Устройство управления контейнером, включающее раму с установленными на ней твистлоками, силовым приводом, подвижным механизмом зацепления и средствами передачи усилия, соединяющими силовой привод и подвижный механизм зацепления, при этом силовой привод и средства передачи усилия размещены по существу вдоль длинных сторон рамы, подвижный механизм зацепления размещен по существу на коротких сторонах рамы, и силовой привод выполнен с возможностью придания подвижному механизму зацепления возвратно-поступательного движения преимущественно в направлении, перпендикулярном плоскости рамы.
2. Устройство управления контейнером по п. 1, в котором силовой привод расположен по существу в средней части рамы.
3. Устройство управления контейнером по п. 1 или 2, в котором силовой привод является гидравлическим приводом, включающим по меньшей мере один гидроцилиндр.
4. Устройство управления контейнером по п. 3, дополнительно содержащее устройство создания давления для гидравлического привода.
5. Устройство управления контейнером по п. 3, дополнительно содержащее средства подвода давления для гидравлического привода.
6. Устройство управления контейнером по п. 1, в котором средства передачи усилия являются тросово-блочным механизмом.
7. Устройство управления контейнером по п. 6, в котором тросово-блочный механизм содержит полиспаст.
8. Устройство управления контейнером по п. 1, в котором подвижный механизм зацепления включает поворотный механизм и дополнительный твистлок, входящий в зацепление с ответной частью контейнера.
9. Устройство управления контейнером по п. 8, в котором силовой привод и средства передачи усилия выполнены с возможностью придания вращательного движения дополнительному твистлоку.
| ТРАНСПОРТНЫЙ КОНТЕЙНЕР СО СДВИЖНЫМ ДНИЩЕМ И СПОСОБ ЕГО ЭКСПЛУАТАЦИИ | 2018 |
|
RU2681233C1 |
| СПРЕДЕР НАКЛОННЫЙ ДЛЯ КОНТЕЙНЕРОВ | 2017 |
|
RU2667206C1 |
| US 5630635 A1, 20.05.1997. | |||

