Область техники
Настоящее изобретение относится к системе управления силовой установкой.
Уровень техники
В силовой установке, которая является управляемым объектом, управление с обратной связью выполняется так, что выходное значение управления приближается к целевому значению. Тем не менее, при фактическом управлении, вследствие аппаратных или управляющих ограничений, зачастую имеются ограничения на выходное значение управления. При разработке системы управления с игнорированием таких ограничений, переходный отклик с большой вероятностью ухудшается, и управление зачастую становится нестабильным.
В качестве технологии для улучшения удовлетворения ограничений известен "эталонный регулятор" (см., например, публикацию не прошедшей экспертизу заявки на патент Японии № 2017-1016271). Эталонный регулятор учитывает удовлетворение ограничений и корректирует целевое значение для выходного значения управления, вычисленное на основе предварительно определенных параметров силовой установки, чтобы вычислять скорректированное целевое значение. В частности, эталонный регулятор выполняет поиск минимального значения предварительно определенной функции объекта, чтобы, тем самым, вычислять скорректированное целевое значение.
В публикации не прошедшей экспертизу заявки на патент Японии № 2017-1016271 описана корректировка целевых значений давления наддува и доли EGR в дизельном двигателе посредством эталонного регулятора. В частности, градиентный метод используется для обновления скорректированных целевых значений, так что значение функции объекта становится меньше, и, таким образом, скорректированные целевые значения вычисляются.
Целевая функция включает в себя член, относящийся к величине корректировки целевого значения, и член, относящийся к степени удовлетворения ограничивающих условий, относящихся к количественным параметрам состояния. Член, относящийся к степени удовлетворения ограничивающих условий, становится тем больше, чем ниже степень удовлетворения ограничивающих условий. Когда член, относящийся к степени удовлетворения ограничивающих условий, является большим, целевое значение корректируется так, что значение целевой функции становится меньше. В результате, степень удовлетворения ограничивающих условий делается большой, и перерегулирование выходного значения управления пресекается.
Техническая задача
В этом отношении, при выполнении управления, чтобы делать выходное значение управления ближе к целевому значению, когда разница между целевым значением и текущим значением для выходного значения управления является большой, по сравнению с тем, когда разница между целевым значением и текущим значением является небольшой, вероятность будущих прогнозных значений количественных параметров состояния силовой установки, граничащих с ограничивающими условиями, становится более высокой. По этой причине, при проведении поиска минимального значения целевой функции, когда разница между целевым значением и текущим значением является большой, величина корректировки целевого значения имеет тенденцию становиться больше. Однако, если величина корректировки целевого значения делается большой, когда разница между целевым значением и текущим значением является большой, скорость, с которой выходное значение управления приближается к целевому значению, становится медленной, и отклик выходного значения управления ухудшается.
Следовательно, в свете вышеописанной технической задачи, целью настоящего изобретения является пресечение перерегулирования выходного значения управления, в то же время пресекая ухудшение отклика выходного значения управления, если выполняется приближение выходного значения управления силовой установкой к целевому значению.
Решение задачи
Краткое изложение настоящего раскрытия сущности заключается в следующем.
(1) Система управления силовой установкой содержит: часть вычисления целевого значения, выполненную с возможностью вычислять целевое значение для выходного значения управления силовой установкой на основе одного или более предварительно определенных параметров силовой установки; часть корректировки целевого значения, выполненную с возможностью корректировать целевое значение в направлении пресечения перерегулирования выходного значения управления с тем, чтобы вычислять скорректированное целевое значение; и контроллер обратной связи, выполненный с возможностью определять входное значение управления силовой установкой, так что выходное значение управления приближается к скорректированному целевому значению, при этом часть корректировки целевого значения конфигурируется, чтобы, если выполняется изменение выходного значения управления в целевое значение, устанавливать скорректированное целевое значение так, что величина корректировки для целевого значения становится равной или меньше предварительно определенного значения, затем изменять скорректированное целевое значение так, что величина корректировки целевого значения становится больше предварительно определенного значения, затем изменять скорректированное целевое значение так, что величина корректировки целевого значения становится равной или меньше предварительно определенного значения, прежде чем выходное значение управления достигает целевого значения.
(2) Система управления силовой установкой, описанная в вышеупомянутом пункте (1), при этом часть корректировки целевого значения конфигурируется, чтобы, если выполняется изменение выходного значения управления в целевое значение, устанавливать скорректированное целевое значение так, что величина корректировки целевого значения становится равной или меньше предварительно определенного значения, когда разница целевого значения и текущего значения для выходного значения управления больше первого контрольного значения, изменять скорректированное целевое значение так, что величина корректировки целевого значения становится больше предварительно определенного значения, когда разница достигает первого контрольного значения, и изменять скорректированное целевое значение так, что величина корректировки целевого значения становится равной или меньше предварительно определенного значения, когда разница достигает второго контрольного значения, и при этом второе контрольное значение меньше первого контрольного значения.
(3) Система управления силовой установкой, описанная в вышеприведенном пункте (1), при этом часть корректировки целевого значения конфигурируется, чтобы выполнять поиск минимального значения целевой функции, чтобы, тем самым, вычислять скорректированное целевое значение, и целевая функция включает в себя член, относящийся к величине корректировки целевого значения, и член, относящийся к степени удовлетворения ограничивающих условий, касающихся количественного параметра состояния силовой установки, и конфигурируется так, что, когда разница целевого значения и текущего значения для выходного значения управления является относительно большой, по сравнению с тем, когда разница является относительно небольшой, степень вклада члена, относящегося к величине корректировки целевого значения, в значение целевой функции становится больше.
(4) Система управления силовой установкой, описанная в вышеприведенном пункте (3), при этом член, относящийся к величине корректировки целевого значения, является значением, полученным умножением компонента, который становится тем больше, чем больше величина корректировки целевого значения, на компонент, который становится тем больше, чем больше разница.
(5) Система управления силовой установкой, описанная в вышеприведенном пункте (3), при этом член, относящийся к степени удовлетворения ограничивающих условий, является значением, полученным делением компонента, который становится тем больше, чем ниже степень удовлетворения ограничивающих условий, на компонент, который становится тем больше, чем больше разница.
(6) Система управления силовой установкой, описанная в вышеприведенных пунктах (4) или (5), при этом компонент, который становится тем больше, чем больше разница, является "n" степенью различия, и "n" больше нуля.
(7) Система управления силовой установкой, описанная в вышеприведенном пункте (6), при этом силовая установка является двигателем внутреннего сгорания, а "n" является значением от 4 до 6.
Полезные результаты изобретения
Согласно настоящему изобретению, возможно пресекать перерегулирование выходного значения управления, в то же время пресекая ухудшение отклика выходного значения управления, если выполняется приближение выходного значения управления силовой установкой к целевому значению.
Краткое описание чертежей
Фиг. 1 - вид, показывающий структуру управления отслеживанием целевого значения системы управления силовой установкой согласно первому варианту осуществления.
Фиг. 2 - структура управления с прогнозированием, полученная посредством эквивалентной модификации структуры управления отслеживанием целевого значения с фиг. 1.
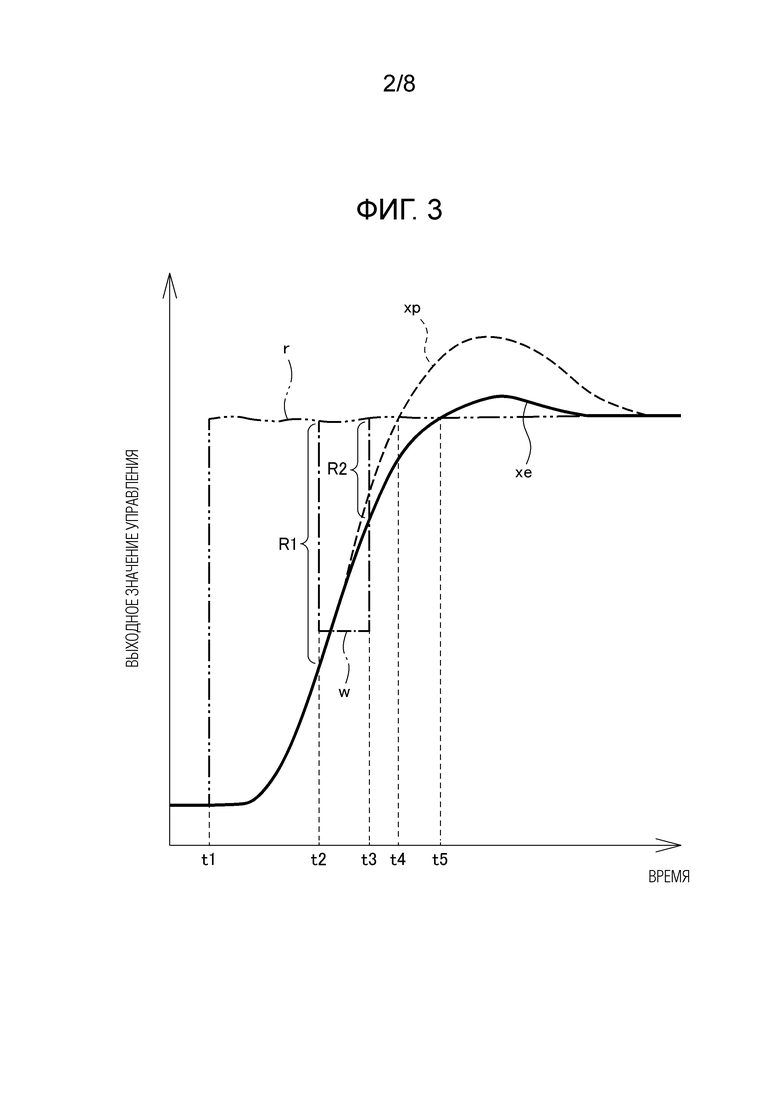
Фиг. 3 - временная диаграмма целевого значения, скорректированного целевого значения и фактического значения для выходного значения управления в случае выполнения изменения выходного значения управления в целевое значение.
Фиг. 4 - блок-схема последовательности операций, показывающая процедуру управления для обработки для корректировки целевого значения в первом варианте осуществления.
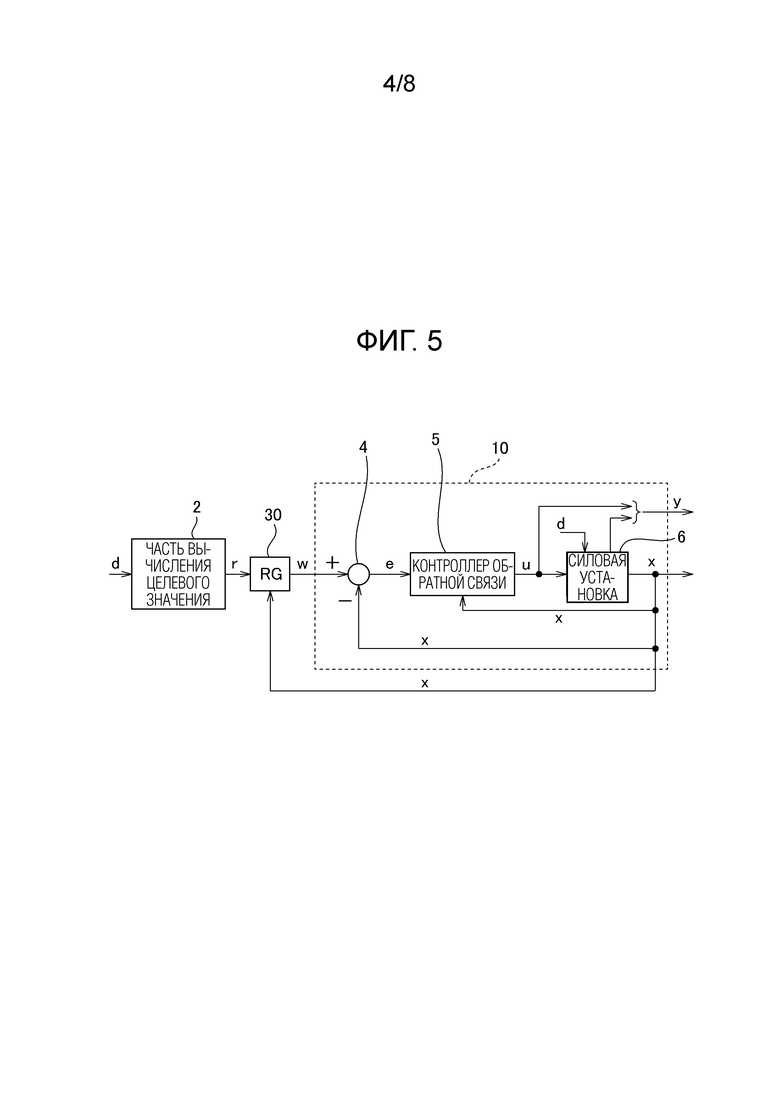
Фиг. 5 - вид, показывающий структуру управления отслеживанием целевого значения системы управления силовой установкой согласно второму варианту осуществления.
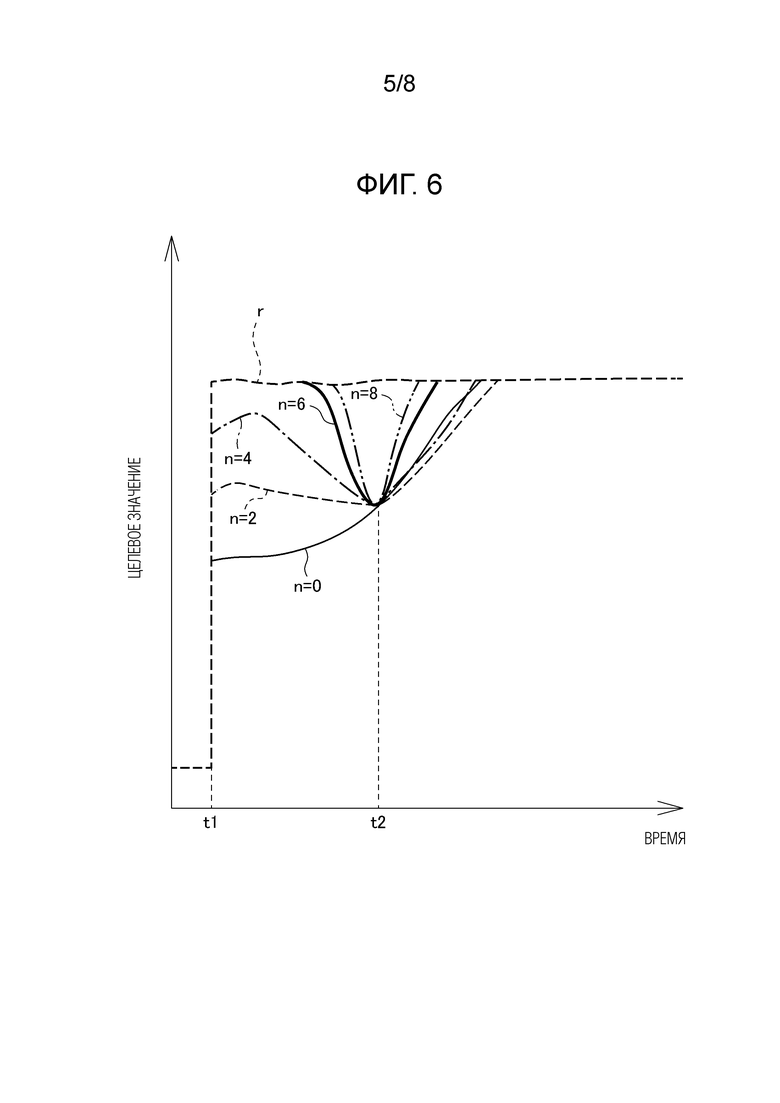
Фиг. 6 - временная диаграмма скорректированного целевого значения, при выполнении изменения значения "n" в целевой функции.
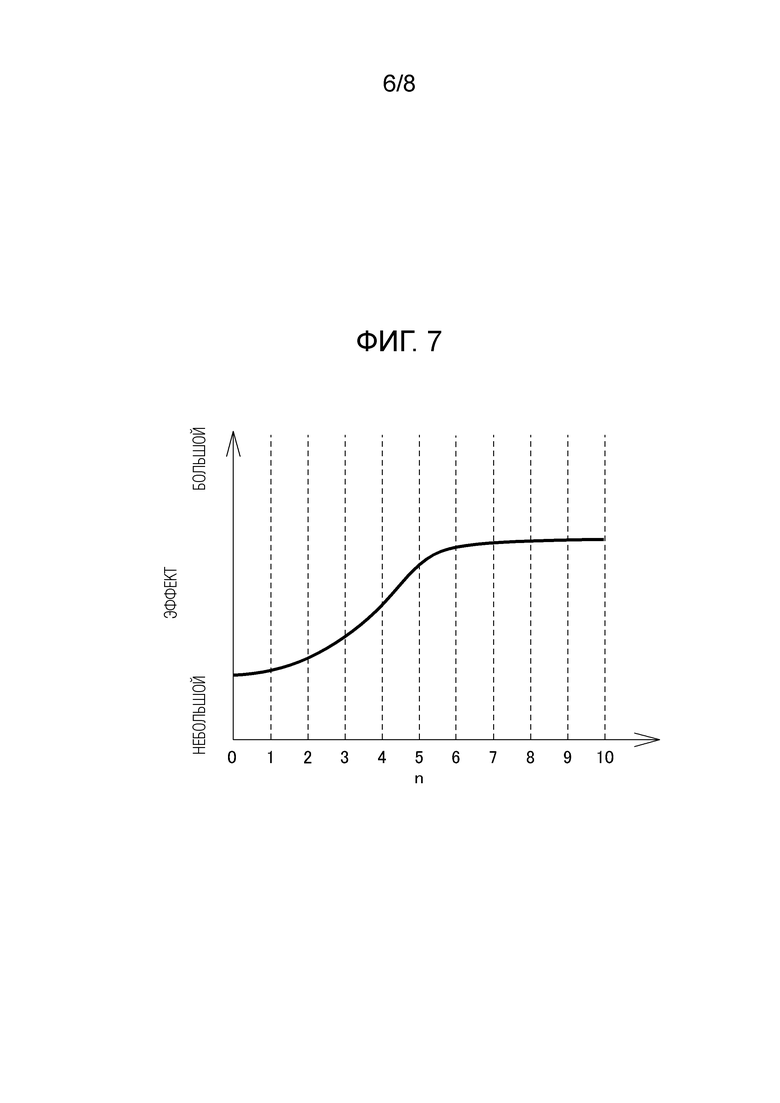
Фиг. 7 - вид, схематично показывающий степень влияния при выполнении изменения значения "n" в целевой функции, когда силовая установка является двигателем внутреннего сгорания.
Фиг. 8 - временная диаграмма целевого значения, скорректированного целевого значения и фактического значения для выходного значения управления в случае выполнения изменения выходного значения управления в целевое значение.
Фиг. 9 - блок-схема последовательности операций, показывающая процедуру управления для обработки для корректировки целевого значения во втором варианте осуществления.
Подробное описание вариантов осуществления изобретения
Ниже, обращаясь к чертежам, варианты осуществления настоящего изобретения будут объяснены подробно. Следует отметить, что в нижеприведенном пояснении, аналогичным компонентам назначаются идентичные ссылки с номерами.
Первый вариант осуществления
Сначала, со ссылкой на фиг. 1-4, будет объяснен первый вариант осуществления настоящего изобретения.
Конфигурация системы управления силовой установкой
Фиг. 1 представляет собой вид, показывающий структуру управления отслеживанием целевого значения системы управления силовой установкой согласно первому варианту осуществления. Система управления силовой установкой снабжается частью 2 вычисления целевого значения, частью 3 корректировки целевого значения, компаратором 4 и контроллером 5 обратной связи. Например, микропроцессор, такой как электронный блок управления (ECU), функционирует в качестве системы управления силовой установкой.
Часть, окруженная прерывистой линией на фиг. 1, функционирует как система 10 с замкнутым контуром, управляющая выходной мощностью силовой установки 6, которая является управляемым объектом. Если система 10 с замкнутым контуром была спроектирована, структура управления отслеживанием целевого значения на фиг. 1 эквивалентно модифицируется, чтобы получать структуру управления с прогнозированием на фиг. 2.
Часть 2 вычисления целевого значения вычисляет целевое значение "r" для выходного значения "x" управления силовой установкой 6 на основе внешнего входного значения "d" и выводит целевое значение "r" в часть 3 корректировки целевого значения. Часть 2 вычисления целевого значения, например, конфигурируется как карта целевого значения, в которой показывается соотношение внешнего входного значения "d" и целевого значения "r". Внешнее входное значение "d" является предварительно определенным параметром силовой установки 6.
Если целевое значение "r" вводится как есть в систему 10 с замкнутым контуром, управление с обратной связью выполняется так, что выходное значение "x" управления приближается к целевому значению "r". В этом случае, выходное значение "x" управления может быть сделано быстро приближающимся к целевому значению "r", но величина перерегулирования выходного значения "x" управления становится больше. По этой причине, в этом варианте осуществления, целевое значение "r" корректируется посредством части 3 корректировки целевого значения. Часть 3 корректировки целевого значения корректирует целевое значение "r" в направлении пресечения перерегулирования выходного значения "x" управления, чтобы вычислять скорректированное целевое значение "w".
Компаратор 4 вычитает выходное значение "x" управления из скорректированного целевого значения w, чтобы вычислять разницу "e" (=w-x), и выводит разницу "e" в контроллер 5 обратной связи. Целевое значение w вводится посредством части 3 корректировки целевого значения в компаратор 4, в то время как выходное значение "x" управления выводится из силовой установки 6, в которую вводятся входное значение "u" управления и внешнее входное значение "d". Выходное значение "x" управления обнаруживается датчиком или другим детектором или оценивается с помощью вычислительной формулы и т.д.
Контроллер 5 обратной связи определяет входное значение "u" управления так, что выходное значение "x" управления приближается к скорректированному целевому значению w. Т.е., контроллер 5 обратной связи определяет входное значение "u" управления так, что разница "e" приближается к нулю. В контроллере 5 обратной связи используется PI-управление, PID-управление или другое известное управление. Контроллер 5 обратной связи вводит входное значение "u" управления в силовую установку 6. Дополнительно, выходное значение "x" управления вводится в контроллер 5 обратной связи в качестве обратной связи по состоянию. Отметим, что ввод выходного значения "x" управления в контроллер 5 обратной связи может быть пропущен. Дополнительно, компаратор 4 может быть встроен в контроллер 5 обратной связи.
Корректировка целевого значения
Как объяснено выше, часть 3 корректировки целевого значения корректирует целевое значение "r" в направлении пресечения перерегулирования выходного значения "x" управления, чтобы вычислять скорректированное целевое значение "w". Отметим, что "направление, пресекающее перерегулирование выходного значения 'x' управления", означает направление выполнения уменьшения скорректированного целевого значения "w" при выполнении увеличения выходного значения "x" управления по направлению к целевому значению "r" и означает направление выполнения увеличения скорректированного целевого значения "w" при выполнении уменьшения выходного значения "x" управления по направлению к целевому значению "r".
Если величина корректировки целевого значения "r" делается большой, когда разница между целевым значением "r" и текущим значением для выходного значения "x" управления является большой, скорость приближения выходного значения "x" управления к целевому значению "r" становится медленнее, и отклик выходного значения "x" управления ухудшается. Дополнительно, чтобы пресекать перерегулирование выходного значения "x" управления, эффективно увеличивать величину корректировки целевого значения "r", когда выходное значение "x" управления приближается к целевому значению "r". Дополнительно, чтобы выполнять сведение выходного значения "x" управления к целевому значению "r", необходимо делать величину корректировки целевого значения "r" меньшей, прежде чем выходное значение "x" управления достигает целевого значения "r".
По этой причине, в настоящем варианте осуществления, часть 3 корректировки целевого значения устанавливает скорректированное целевое значение "w" так, что величина корректировки целевого значения "r" становится равной или меньше предварительно определенного значения при выполнении изменения выходного значения "x" управления в целевое значение "r", затем изменяет скорректированное целевое значение "w" так, что величина корректировки целевого значения "r" становится больше предварительно определенного значения, затем изменяет скорректированное целевое значение "w" так, что величина корректировки целевого значения "r" становится равной или меньше предварительно определенного значения, прежде чем выходное значение "x" управления достигает целевого значения "r". Отметим, что "величина корректировки целевого значения 'r'" является разницей между целевым значением "r" и скорректированным целевым значением "w".
Вследствие этого, если разница между целевым значением "r" и текущим значением для выходного значения "x" управления является относительно большой, возможно делать скорость изменения выходного значения "x" управления быстрее и возможно пресекать ухудшение отклика выходного значения "x" управления. Дополнительно, когда разница между целевым значением "r" и текущим значением для выходного значения "x" управления является относительно небольшой, возможно замедлять скорость изменения выходного значения "x" управления и возможно пресекать перерегулирование выходного значения "x" управления. Следовательно, в настоящем варианте осуществления, при выполнении приближения выходного значения "x" управления к целевому значению "r", возможно пресекать перерегулирование выходного значения "x" управления, в то же время пресекая ухудшение отклика выходного значения "x" управления.
В настоящем варианте осуществления, когда разница между целевым значением "r" и текущим значением для выходного значения "x" управления больше первого контрольного значения, часть 3 корректировки целевого значения устанавливает скорректированное целевое значение "w" так, что величина корректировки целевого значения "r" становится равной или меньше предварительно определенного значения, изменяет скорректированное целевое значение "w" так, что величина корректировки целевого значения "r" становится больше вышеупомянутого предварительно определенного значения, когда разница между целевым значением "r" и текущим значением достигает первого контрольного значения, и изменяет скорректированное целевое значение "w" так, что величина корректировки целевого значения "r" становится равной или меньше вышеупомянутого предварительно определенного значения, когда разница между целевым значением "r" и текущим значением достигает второго контрольного значения. Второе контрольное значение меньше первого контрольного значения.
Например, часть 3 корректировки целевого значения устанавливает скорректированное целевое значение "w" в целевое значение "r", когда разница между целевым значением "r" и текущим значением больше первого контрольного значения, выполняет отделение скорректированного целевого значения "w" от целевого значения "r", когда разница между целевым значением "r" и текущим значением достигает первого контрольного значения, и изменяет скорректированное целевое значение "w" в целевое значение "r", когда разница между целевым значением "r" и текущим значением достигает второго контрольного значения.
Объяснение управления с помощью временной диаграммы
Фиг. 3 представляет собой временную диаграмму целевого значения, скорректированного целевого значения и фактического значения для выходного значения управления в случае выполнения изменения выходного значения управления в целевое значение. Фиг. 3 показывает целевое значение "r" для выходного значения "x" управления штрих-двухпунктирной линией и показывает скорректированное целевое значение "w" для выходного значения "x" управления штрих-пунктирной линией. Дополнительно, фактическое значение (текущее значение) xe для выходного значения "x" управления, когда управление настоящего варианта осуществления выполняется, показано сплошной линией, в то время как фактическое значение (текущее значение) xp для выходного значения "x" управления, когда управление сравнительного примера выполняется, показано прерывистой линией.
В примере на фиг. 3, во время t1, состояние силовой установки 6 изменяется, и целевое значение "r" увеличивается. Целевое значение "r" поддерживается практически в постоянном значении после времени t1. В этом примере управление выполняется, чтобы осуществлять увеличение выходного значения "x" управления по направлению к целевому значению "r".
В управлении сравнительного примера целевое значение "r" не корректируется. Следовательно, входное значение "u" управления определяется контроллером 5 обратной связи так, что выходное значение "x" управления приближается к целевому значению "r". В результате, после времени t1, фактическое значение xp постепенно растет и во время t4 достигает целевого значения "r". После времени t4 происходит перерегулирование выходного значения "x" управления, когда фактическое значение xp сводится к целевому значению "r".
С другой стороны, в управлении настоящего варианта осуществления, скорректированное целевое значение "w" вычисляется, и входное значение "u" управления определяется контроллером 5 обратной связи так, что выходное значение "x" управления приближается к скорректированному целевому значению "w". От времени t1 до времени t2 скорректированное целевое значение "w" равно целевому значению "r". Т.е., целевое значение "r" не корректируется.
Во время t2 разница между целевым значением "r" и фактическим значением xe достигает первого контрольного значения R1, и скорректированное целевое значение "w" изменяется так, что величина корректировки целевого значения "r" становится больше предварительно определенного значения. В этом примере, чтобы пресекать перерегулирование выходного значения "x" управления, скорректированное целевое значение "w" делается меньшим пошагово. Скорректированное целевое значение "w" поддерживается в постоянном значении со времени t2 до времени t3.
Во время t3 разница между целевым значением "r" и фактическим значением xe достигает второго контрольного значения, и скорректированное целевое значение "w" изменяется на целевое значение "r". В этом примере, чтобы выполнять схождение выходного значения "x" управления к целевому значению "r", скорректированное целевое значение "w" делается больше поэтапно. После времени t3 скорректированное целевое значение "w" поддерживается в целевом значении "r". Т.е., целевое значение "r" не корректируется.
После чего, фактическое значение xe достигает целевого значения "r" во время t5. После времени t5 происходит небольшое перерегулирование выходного значения "x" управления, затем фактическое значение xe сводится к целевому значению "r".
В управлении настоящего варианта осуществления, делая скорректированное целевое значение "w" меньше во время t2, возможно применять торможение роста выходного значения "x" управления. По этой причине, по сравнению с управлением сравнительного примера, возможно уменьшать величину перерегулирования выходного значения "x" управления. Дополнительно, скорректированное целевое значение "w" устанавливается в целевое значение "r" до времени t2, таким образом, тем же способом, что и в управлении сравнительного примера, выходное значение "x" управления может быть сделано быстро приближающимся к целевому значению "r". Следовательно, в управлении настоящего варианта осуществления, возможно пресекать перерегулирование выходного значения "x" управления, в то же время пресекая ухудшение отклика выходного значения "x" управления.
Обработка для корректировки целевого значения
Ниже, со ссылкой на блок-схему последовательности операций на фиг. 4, управление для корректировки целевого значения "r", чтобы вычислять скорректированное целевое значение "w" будет объяснено подробно. Фиг. 4 - это блок-схема последовательности операций, показывающая процедуру управления для обработки для корректировки целевого значения в первом варианте осуществления. Настоящая процедура управления циклически выполняется с предварительно определенными интервалами посредством системы управления силовой установкой.
Сначала, на этапе S101, часть 2 вычисления целевого значения получает внешнее входное значение "d". Далее, на этапе S102, часть 2 вычисления целевого значения вычисляет целевое значение "r" на основе внешнего входного значения "d".
Далее, на этапе S103, часть 3 корректировки целевого значения решает, действительно ли абсолютное значение для значения целевого значения "r" минус текущее значение PV выходного значения "x" управления, т.е., разница между целевым значением "r" и текущим значением PV, больше первого контрольного значения R1. Первое контрольное значение R1 предварительно определяется и является значением больше нуля. Если оценивается, что разница между целевым значением "r" и текущим значением PV больше первого контрольного значения R1, настоящая процедура управления переходит к этапу S104.
На этапе S104 часть 3 корректировки целевого значения устанавливает флаг изменения скорректированного целевого значения в "1". Отметим, что флаг F изменения скорректированного целевого значения сбрасывается в ноль, когда управление с обратной связью для выходного значения "x" управления заканчивается. Далее, на этапе S105, часть 3 корректировки целевого значения устанавливает скорректированное целевое значение "w" в целевое значение "r", с тем, чтобы выполнять быстрое изменение выходного значения "x" управления в целевое значение "r". После этапа S105 настоящая процедура управления заканчивается.
С другой стороны, если на этапе S103 оценивается, что разница между целевым значением "r" и текущим значением PV равна или меньше первого контрольного значения R1, текущая процедура управления переходит к этапу S106. На этапе S106, часть 3 корректировки целевого значения оценивает, равен ли "1" флаг F изменения скорректированного целевого значения. Если оценивается, что флаг F обновления скорректированного целевого значения равен "1", настоящая процедура управления переходит к этапу S107.
На этапе S107 часть 3 корректировки целевого значения корректирует скорректированное целевое значение "w" так, что величина корректировки целевого значения "r" становится больше предварительно определенного значения. Предварительно определенное значение предварительно задается так, чтобы пресекать перерегулирование выходного значения "x" управления, и является значением больше нуля. Часть 3 корректировки целевого значения выполняет изменение скорректированного целевого значения "w" пошагово в направлении пресечения перерегулирования выходного значения "x" управления. В частности, часть 3 корректировки целевого значения делает скорректированное целевое значение "w" меньше целевого значения "r" при выполнении увеличения выходного значения "x" управления в сторону целевого значения "r" и делает скорректированное целевое значение "w" больше целевого значения "r" при выполнении уменьшения выходного значения "x" управления в сторону целевого значения "r".
Далее, на этапе S108, часть 3 корректировки целевого значения оценивает, действительно ли разница между целевым значением "r" и текущим значением PV равна или меньше второго контрольного значения R2. Второе контрольное значение R2 является предварительно заданным и больше нуля и меньше первого контрольного значения R1. Если оценивается, что разница между целевым значением "r" и текущим значением PV больше второго контрольного значения R2, настоящая процедура управления заканчивается. В этом случае, скорректированное целевое значение "w" поддерживается в значении, измененном на этапе S107.
С другой стороны, если оценивается, что разница между целевым значением "r" и текущим значением PV равна или меньше второго контрольного значения R2, настоящая процедура управления переходит к этапу S109. На этапе S109 часть 3 корректировки целевого значения изменяет скорректированное целевое значение "w" в целевое значение "r", с тем, чтобы выполнять схождение выходного значения "x" управления в целевое значение "r". Часть 3 корректировки целевого значения выполняет изменение скорректированного целевого значения "w" в целевое значение "r" поэтапно. Далее, на этапе S110, часть 3 корректировки целевого значения устанавливает флаг F изменения скорректированного целевого значения в ноль. После этапа S110 настоящая процедура управления заканчивается.
Дополнительно, если на этапе S106 оценивается, что флаг F изменения скорректированного целевого значения равен нулю, настоящая процедура управления переходит к этапу S111. На этапе S111 часть 3 корректировки целевого значения устанавливает скорректированное целевое значение "w" в целевое значение "r". После этапа S111 настоящая процедура управления заканчивается.
Отметим, что, на этапе S105, этапе S109 и этапе S111, пока скорректированная величина целевого значения "r" равна или меньше предварительно определенного значения, скорректированное целевое значение "w" может быть установлено в значение, отличающееся от целевого значения "r". Дополнительно, часть 3 корректировки целевого значения может постепенно изменять скорректированное целевое значение "w" в измененное значение на этапе S107 и может постепенно изменять скорректированное целевое значение "w" в целевое значение "r" на этапе S109.
Второй вариант осуществления
Конфигурация и управление системы управления силовой установкой во втором варианте осуществления, в основном, являются аналогичными системе управления силовой установкой в первом варианте осуществления за исключением аспектов, объясненных ниже. По этой причине, ниже, второй вариант осуществления настоящего изобретения будет объяснен, фокусируясь на частях, отличных от первого варианта осуществления.
Фиг. 5 представляет собой вид, показывающий структуру управления отслеживанием целевого значения системы управления силовой установкой согласно второму варианту осуществления. Во втором варианте осуществления эталонный регулятор (RG) 30 функционирует в качестве части корректировки целевого значения, корректирующей целевое значение "r", чтобы вычислять скорректированное целевое значение "w". На фиг. 5 "y" являются количественными параметрами состояния силовой установки 6, ограниченными в значении, которое может быть взято.
Как объяснено выше, в системе 10 с замкнутым контуром выполняется управление с обратной связью для выходного значения "x" управления. Однако, в фактическом управлении, вследствие ограничений аппаратных средств или управления, существуют ограничения на количественные параметры "y" состояния. По этой причине, если целевое значение, вычисленное без учета таких ограничений, вводится в систему 10 с замкнутым контуром, количественные параметры "y" состояния могут конфликтовать с ограничениями, таким образом, приводя к ухудшению промежуточного отклика и неустойчивости управления.
По этой причине, эталонный регулятор 30 корректирует целевое значение "r", чтобы вычислять скорректированное целевое значение "w" так, что степень удовлетворения ограничивающих условий, касающихся количественных параметров "y" состояния, становится выше. В частности, эталонный регулятор 30 выполняет поиск минимального значения целевой функции, чтобы, тем самым, вычислять скорректированное целевое значение "w". В поиске минимального значения эталонный регулятор 30 обновляет скорректированное целевое значение "w" предварительно определенное число раз, так что значение целевой функции становится меньше, чтобы, тем самым, вычислять окончательное скорректированное целевое значение "w", вводимое в систему 10 с замкнутым контуром.
Целевая функция включает в себя член, относящийся к величине корректировки целевого значения "r", и член, относящийся к степени удовлетворения ограничивающих условий, относящихся к количественным параметрам "y" состояния. Когда разница между целевым значением "r" и текущим значением для выходного значения "x" управления является относительно большим, по сравнению с тем, когда разница между целевым значением "r" и текущим значением является относительно небольшой, необходимо делать величину корректировки целевого значения "r" большей, с тем, чтобы повышать степень удовлетворения ограничивающих условий.
Однако, если величина корректировки целевого значения "r" увеличивается, когда разница между целевым значением "r" и текущим значением является большим, скорость приближения выходного значения "x" управления к целевому значению "r" становится медленней, и отклик выходного значения "x" управления ухудшается. Дополнительно, чтобы пресекать перерегулирование выходного значения "x" управления, эффективно увеличивать величину корректировки целевого значения "r", когда выходное значение "x" управления приближается к целевому значению "r".
По этой причине, целевая функция конфигурируется так, что величина корректировки целевого значения "r" становится меньше, когда разница между целевым значением "r" и текущим значением для выходного значения "x" управления является относительно большой по сравнению с тем, когда разница между целевым значением "r" и текущим значением для выходного значения "x" управления является относительно небольшой. В частности, целевая функция конфигурируется так, что степень вклада члена, относящегося к величине корректировки целевого значения, в значение целевой функции становится больше, когда разница между целевым значением "r" и текущим значением для выходного значения "x" управления является относительно большой по сравнению с тем, когда разница между целевым значением "r" и текущим значением является относительно небольшой.
При этом, если разница между целевым значением "r" и текущим значением для выходного значения "x" управления является относительно большой, возможно увеличивать скорость изменения выходного значения "x" управления и возможно пресекать ухудшение отклика выходного значения "x" управления. Дополнительно, когда разница между целевым значением "r" и текущим значением для выходного значения "x" управления является относительно небольшим, возможно замедлять скорость изменения выходного значения "x" управления и возможно пресекать перерегулирование выходного значения "x" управления. Следовательно, во втором варианте осуществления, при выполнении приближения выходного значения "x" управления к целевому значению "r", возможно пресекать перерегулирование выходного значения "x" управления, в то же время пресекая ухудшение отклика выходного значения "x" управления.
Например, целевая функция J(w) определяется следующей формулой (1).

где PV является текущим значением для выходного значения "r" управления, а "n" является значением больше нуля. Целевая функция J(w) конфигурируется как сумма члена, относящегося к величине корректировки целевого значения "r" (формула (1), правая сторона, первый член), и члена, относящегося к степени удовлетворения ограничивающих условий, относящихся к количественным параметрам "y" состояния (формула (1), правая сторона, второй член и далее).
Член, относящийся к величине корректировки целевого значения "r", является значением компонента ((r-w)2), который становится тем больше, чем больше величина корректировки целевого значения "r", умноженная на компонент ((|r-PV|)n), который становится тем больше, чем больше разница между целевым значением "r" и текущим значением для выходного значения "x" управления. В этом случае, когда величина корректировки целевого значения "r" является предварительно определенным значением, член, относящийся к величине корректировки целевого значения "r", становится тем больше, чем больше разница между целевым значением "r" и текущим значением для выходного значения "x" управления. По этой причине, если разница между целевым значением "r" и текущим значением для выходного значения "x" управления является относительно большой, по сравнению с тем, когда разница между целевым значением "r" и текущим значением для выходного значения "x" управления является относительно небольшой, степень вклада члена, относящегося к величине корректировки целевого значения "r", в значение целевой функции J(w) становится большей.
В вышеприведенной формуле (1) компонент, который становится тем больше, чем больше величина корректировки целевого значения "r", которая является разницей между целевым значением "r" и скорректированным целевым значением "w", т.е., квадрат величины корректировки целевого значения "r". Однако, этот компонент может быть значением, полученным умножением величины корректировки целевого значения "r" на предварительно определенный коэффициент и т.д.
Дополнительно, в вышеприведенной формуле (1) компонент, который становится тем больше, чем больше разница между целевым значением "r" и текущим значением для выходного значения "x" управления, является n-й степенью разницы между целевым значением "r" и текущим значением PV. Однако, этот компонент может быть значением, полученным умножением разницы между целевым значением "r" и текущим значением PV на предварительно определенный коэффициент.
Член, относящийся к степени удовлетворения ограничивающих условий, включает в себя квадрат первой функции S1 штрафа, квадрат второй функции S2 штрафа и т.д. Число функций штрафа колеблется в зависимости от числа ограничивающих условий. Например, если существуют четыре ограничивающих условия, член, относящийся к степени удовлетворения ограничивающих условий, включает в себя квадрат первой функции S1 штрафа, квадрат второй функции S2 штрафа, квадрат третьей функции S3 штрафа и квадрат четвертой функции S4 штрафа. Функции штрафа становятся тем больше, чем ниже степень удовлетворения ограничивающих условий. Отметим, что функции штрафа могут не быть возведенными в квадрат.
Первая функция S1 штрафа относится к степени удовлетворения ограничивающего условия для выходного значения "x" корректировки, которая является одним из количественных параметров "y" состояния. В первой функции S1 штрафа величина перерегулирования выходного значения "x" управления, не становящегося больше нуля, определяется в качестве ограничивающего условия. При выполнении увеличения выходного значения "x" управления в сторону целевого значения "r", первая функция S1 штрафа определяется по следующей формуле (2):
Математическое выражение 1

где x(k) является будущим прогнозным значением выходного значения "x" управления, в то время как p1 является предварительно определенным весовым коэффициентом. Дополнительно, "k" является дискретным шагом времени, в то время как Nh является числом шагов прогнозирования (горизонтом прогнозирования). Первая функция S1 штрафа конфигурируется так, что, когда будущее прогнозное значение x(k) для выходного значения "x" управления становится больше целевого значения "r", разница между будущим прогнозным значением x(k) и целевым значением "r" для выходного значения "x" управления добавляется в качестве штрафа к целевой функции J(w). По этой причине, первая функция S1 штрафа становится тем больше, чем больше величина перерегулирования будущего прогнозного значения x(k) для выходного значения "x" управления.
С другой стороны, если выходное значение "x" управления принудительно уменьшается в сторону целевого значения "r", первая функция S1 штрафа определяется по следующей формуле (3):
Математическое выражение 2

В этом случае, первая функция S1 штрафа конфигурируется так, что, когда будущее прогнозное значение x(k) для выходного значения "x" управления становится меньше целевого значения "r", разница между будущим прогнозным значением x(k) и целевым значением "r" для выходного значения "x" управления добавляется в качестве штрафа к целевой функции J(w). По этой причине, первая функция S1 штрафа становится тем больше, чем больше величина перерегулирования будущего прогнозного значения x(k) для выходного значения "x" управления.
Эталонный регулятор 30 вычисляет будущее прогнозное значение x(k) для выходного значения "x" управления с помощью модели силовой установки 6. Эталонный регулятор 30, например, вычисляет будущее прогнозное значение x(k) для выходного значения "x" управления по следующей формуле (4):

Здесь, f1 является функцией модели, используемой для вычисления будущего прогнозного значения x(k) для выходного значения "x" управления. Сначала, с помощью выходного значения "x" управления во время вычисления, т.е., x(0), вычисляется прогнозное значение x(1) для выходного значения "x" управления на один шаг впереди от времени вычисления. Выходное значение x(0) управления во время вычисления обнаруживается детектором в качестве датчика или оценивается с помощью формулы вычисления и т.д. После этого, будущее прогнозное значение x(k) для выходного значения "x" управления последовательно вычисляется вплоть до прогнозного значения x(Nh) для выходного значения "x" управления на Nh шагов впереди от времени вычисления. Всего Nh будущих прогнозных значений для выходного значения "x" управления вычисляются. Отметим, что значение, полученное умножением времени, соответствующего одному шагу, на число Nh шагов прогнозирования, становится временным периодом прогнозирования.
Вторая функция S2 штрафа относится к степени удовлетворения ограничивающего условия, относящегося к предварительно определенному количественному параметру y2 состояния. Количественный параметр y2 состояния является, например, давлением, скоростью вращения и т.д. Во второй функции S2 штрафа, например, количественный параметр y2 состояния, не становящийся больше верхнего предельного значения, определяется в качестве ограничивающего условия. В этом случае, вторая функция S2 штрафа определяется по следующей формуле (5).
Математическое выражение 3

где y2(k) является будущим прогнозным значением количественного параметра y2 состояния, y2up является предварительно определенным верхним предельным значением количественного параметра y2 состояния, а p 2 является предварительно определенным весовым коэффициентом. Дополнительно, "k" является дискретным шагом времени, в то время как Nh является числом шагов прогнозирования (горизонтом прогнозирования). Вторая функция S2 штрафа конфигурируется так, что, если будущее прогнозное значение y2(k) количественного параметра y2 состояния становится больше верхнего предельного значения y2up, разница будущего прогнозного значения y2(k) и верхнего предельного значения y2up количественного параметра y2 состояния добавляется в качестве штрафа к целевой функции J(w). По этой причине, вторая функция S2 штрафа становится тем больше, чем больше величина, на которую будущее прогнозное значение y2(k) количественного параметра y2 состояния превышает верхнее предельное значение y2up.
Отметим, что, во второй функции S2 штрафа, если количественный параметр y2 состояния, не становящийся меньше нижнего предельного значения, определяется в качестве ограничивающего условия, вторая функция S2 штрафа определяется по следующей формуле (6):
Математическое выражение 4

где y2low является предварительно определенным нижним предельным значением количественного параметра y2 состояния.
В этом случае, вторая функция S2 штрафа конфигурируется так, что, если будущее прогнозное значение y2(k) количественного параметра y2 состояния становится меньше нижнего предельного значения y2low, разница будущего прогнозного значения y2(k) и нижнего предельного значения y2low количественного параметра y2 состояния добавляется в качестве штрафа к целевой функции J(w). По этой причине, вторая функция S2 штрафа становится тем больше, чем больше величина, на которую будущее прогнозное значение y2(k) количественного параметра y2 состояния падает ниже нижнего предельного значения y2low.
Отметим, что будущее прогнозное значение y2(k) количественного параметра y2 состояния вычисляется тем же способом, что и будущее прогнозное значение x(k) для выходного значения "x" управления, с помощью модели силовой установки 6. Дополнительно, будущее прогнозное значение каждого количественного параметра состояния может быть вычислено другим способом в качестве механического обучения с помощью нейронной сети.
Фиг. 6 представляет собой временную диаграмму скорректированного целевого значения при изменении значения "n" в целевой функции J(w). На фиг. 6 целевое значение "r" показано прерывистой линией. Дополнительно, скорректированное целевое значение "w", когда "n" равно нулю, показано сплошной линией, скорректированное целевое значение "w", когда "n" равно 2, показано прерывистой линией, скорректированное целевое значение "w", когда "n" равно 4, показано штрих-пунктирной линией, скорректированное целевое значение "w", когда "n" равно 6, показано сплошной линией, и скорректированное целевое значение "w", когда "n" равно 8, показано штрих-двухпунктирной линией. Отметим, что скорректированное целевое значение "w", когда "n" равно нулю, показано в качестве сравнительного примера.
В примере на фиг. 6, во время t1, состояние силовой установки 6 изменяется, и целевое значение "r" увеличивается. Целевое значение "r" поддерживается практически в постоянном значении после времени t1. Если "n" равно нулю, когда выходное значение "x" управления приближается к целевому значению "r", величина корректировки целевого значения "r" постепенно делается меньшей.
С другой стороны, если "n" равно от 2 до 8, в периоде времени от времени t1 до времени t2, если разница между целевым значением "r" и текущим значением для выходного значения "x" управления является относительно большой, по сравнению с тем, когда разница между целевым значением "r" и текущим значением для выходного значения "x" управления является относительно небольшой, величина корректировки целевого значения "r" становится меньшей. Это обусловлено тем, что, если разница между целевым значением "r" и текущим значением для выходного значения "x" управления является относительно большой, по сравнению с тем, если разница между целевым значением "r" и текущим значением является относительно небольшой, целевая функция конфигурируется так, что степень вклада члена, относящегося к величине корректировки целевого значения, в значение целевой функции становится больше. Дополнительно, от времени t2 и далее, величина корректировки целевого значения "r" становится постепенно меньшей вместе с членом, относящимся к степени удовлетворения ограничивающего условия, которое становится меньше, даже без корректировки целевого значения "r".
Если "n" равно от 2 до 8, чем больше число "n", тем позже момент увеличения величины корректировки целевого значения и быстрее скорость изменения скорректированного целевого значения "w" при увеличении величины корректировки целевого значения. Фиг. 7 - это вид, схематично показывающий степень эффекта при изменении значения "n" в целевой функции J(w), если силовая установка является двигателем внутреннего сгорания. Эффект становится тем большим, чем меньше величина перерегулирования выходного значения "x" управления, и становится тем большим, чем более улучшается отклик выходного значения "x" управления. Т.е., эффект становится наибольшим, если перерегулирование и отклик выходного значения "x" управления улучшаются с наилучшим балансом.
Как показано на фиг. 7, когда "n" равно или больше 6, эффект становится насыщенным, и даже при увеличении "n" эффект не станет гораздо большим. Дополнительно, нагрузка обработки эталонного регулятора 30 становится тем больше, чем больше "n". По этой причине, если силовая установка 6 является двигателем внутреннего сгорания, "n" предпочтительно устанавливается в значение 4-6. Вследствие этого, возможно уменьшать нагрузку обработки эталонного регулятора 30, в то же время эффективно улучшая перерегулирование и отклик выходного значения "x" управления.
Объяснение управления с помощью временной диаграммы
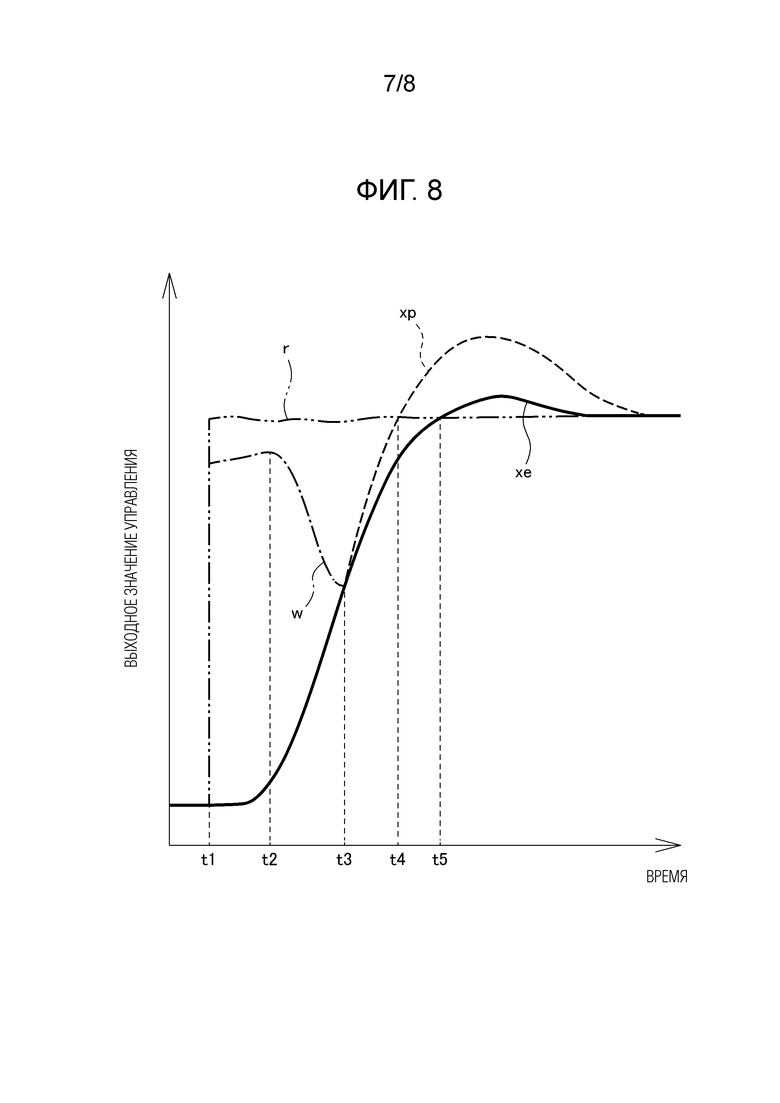
Фиг. 8 представляет собой временную диаграмму целевого значения, скорректированного целевого значения и фактического значения для выходного значения управления в случае выполнения изменения выходного значения управления в целевое значение. На фиг. 8 целевое значение "r" для выходного значения "x" управления показано штрих-двухпунктирной линии, в то время как скорректированное целевое значение "w" для выходного значения "x" управления показано штрих-пунктирной линией. Дополнительно, фактическое значение (текущее значение) xe для выходного значения "x" управления, когда управление настоящего варианта осуществления выполняется, показано сплошной линией, в то время как фактическое значение (текущее значение) xp для выходного значения "x" управления, когда управление сравнительного примера выполняется, показано прерывистой линией.
В примере на фиг. 8 целевая функция вышеприведенной формулы (1) используется для вычисления скорректированного целевого значения "w". "n" было задано в 7. В примере на фиг. 8, во время t1, состояние двигателя внутреннего сгорания изменяется, и целевое значение "r" увеличивается. Целевое значение "r" поддерживается практически в постоянном значении после времени t1. В этом примере управление выполняется, чтобы осуществлять увеличение выходного значения "x" управления по направлению к целевому значению "r".
В управлении сравнительного примера целевое значение "r" не корректируется. Следовательно, входное значение "u" управления определяется контроллером 5 обратной связи так, что выходное значение "x" управления приближается к целевому значению "r". В результате, после времени t1, фактическое значение xp постепенно растет и достигает целевого значения "r" во время t4. После времени t4 происходит перерегулирование выходного значения "x" управления, когда фактическое значение xp сводится к целевому значению "r".
С другой стороны, в управлении настоящего варианта осуществления, скорректированное целевое значение "w" вычисляется эталонным регулятором 30, и входное значение "u" управления определяется контроллером 5 обратной связи так, что выходное значение "x" управления приближается к скорректированному целевому значению "w". В результате скорректированного целевого значения "w", вычисляемого так, что значение целевой функции становится меньшим, со времени t2 до времени t3, скорректированное целевое значение "w" делается постепенно меньшим, и величина корректировки целевого значения "r" делается постепенно большей.
Дополнительно, со времени t3 до времени t5, скорректированное целевое значение "w" постепенно увеличивается до целевого значения "r", и величина корректировки целевого значения "r" постепенно уменьшается. После времени t5 скорректированное целевое значение "w" поддерживается в целевом значении "r". Фактическое значение xe постепенно увеличивается и достигает целевого значения "r" во время t5. Отметим, что, во время t3 и далее, фактическое значение xe увеличивается вместе со скорректированным целевым значением "w". После времени t5 происходит небольшое перерегулирование выходного значения "x" управления, затем фактическое значение xe сводится к целевому значению "r".
В управлении настоящего варианта осуществления, делая скорректированное целевое значение "w" постепенно меньшим со времени t2, возможно применять торможение роста выходного значения "x" управления. По этой причине, по сравнению с управлением сравнительного примера, возможно уменьшать величину перерегулирования выходного значения "x" управления. Дополнительно, величина корректировки целевого значения "r" является небольшой перед временем t2, таким образом, тем же способом, что и управление сравнительного примера, выходное значение "x" управления может быть сделано быстро достигающим целевого значения "r". Следовательно, в управлении настоящего варианта осуществления, возможно пресекать перерегулирование выходного значения "x" управления, в то же время пресекая ухудшение отклика выходного значения "x" управления.
Обработка для корректировки целевого значения
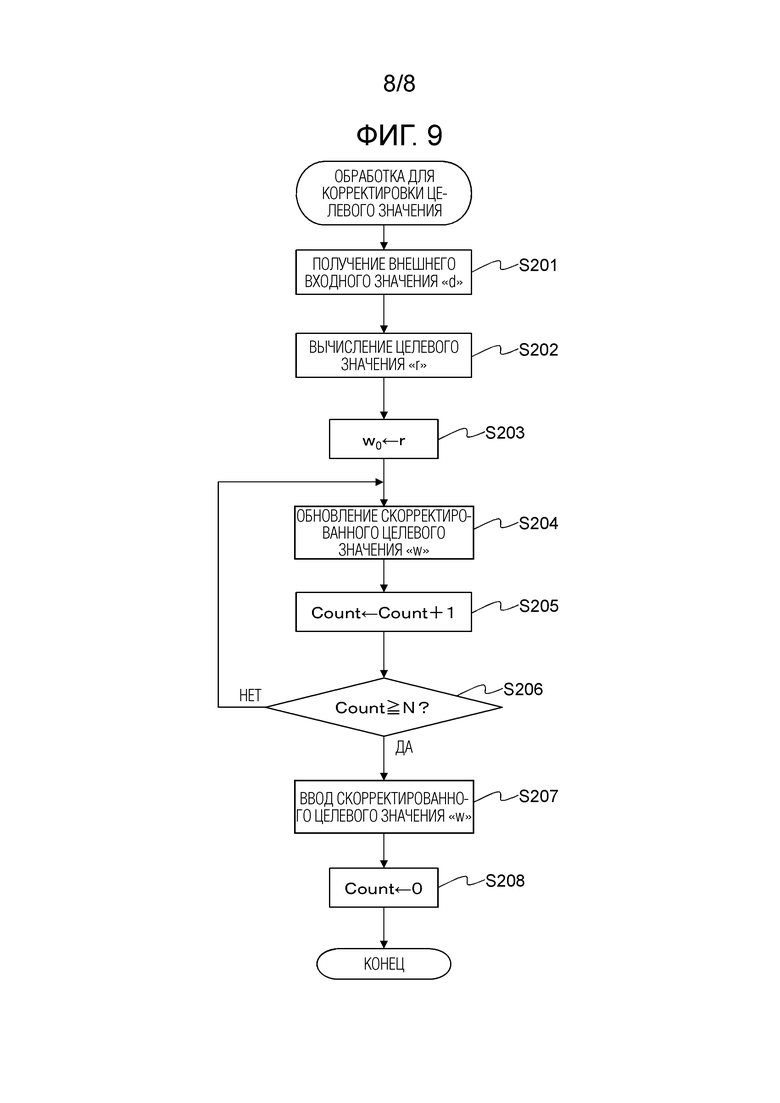
Фиг. 9 представляет собой блок-схему последовательности операций, показывающую процедуру управления для обработки для корректировки целевого значения во втором варианте осуществления. Настоящая процедура управления циклически выполняется с предварительно определенными интервалами посредством системы управления силовой установкой.
Сначала, на этапе S201, часть 2 вычисления целевого значения получает внешнее входное значение "d". Далее, на этапе S202, часть 2 вычисления целевого значения вычисляет целевое значение "r" на основе внешнего входного значения "d".
Далее, на этапе S203, эталонный регулятор 30 устанавливает первоначальное значение w0 для скорректированного целевого значения "w" в целевое значение "r". Далее, на этапах S204-S206, эталонный регулятор 30 выполняет поиск минимального значения целевой функции.
В частности, на этапе S204, эталонный регулятор 30 обновляет скорректированное целевое значение "w" так, что значение целевой функции становится меньшим. Например, эталонный регулятор 30 обновляет скорректированное целевое значение "w" методом двоичного поиска. Отметим, что скорректированное целевое значение "w" может быть обновлено другим известным способом. Например, если число выходных значений "x" управления и скорректированных целевых значений "w" равно или больше двух, эталонный регулятор 30 может обновлять скорректированное целевое значение "w" градиентным методом.
Далее, на этапе S205, эталонный регулятор 30 добавляет 1 к числу обновлений Count. Число обновлений Count показывает число раз, которое скорректированное целевое значение "w" обновляется при поиске минимального значения. Первоначальное значение числа обновлений Count равно "0".
Далее, на этапе S206, эталонный регулятор 30 оценивает, действительно ли число обновлений Count равно или больше предварительно определенного числа N. Предварительно определенное число Count, например, равно 5-200. Если на этапе S206 оценивается, что число обновлений Count меньше предварительно определенного числа, настоящая процедура управления возвращается к этапу S204. Следовательно, в поиске минимального значения, скорректированное целевое значение "w" многократно обновляется до тех пор, пока число обновлений Count не достигнет предварительно определенного числа N.
Если на этапе S206 оценивается, что число обновлений Count равно или больше предварительно определенного числа N, настоящая процедура управления переходит к этапу S207. На этапе S207 эталонный регулятор 30 вводит окончательное скорректированное целевое значение "w" в систему 10 с замкнутым контуром. Далее, на этапе S208, эталонный регулятор 30 сбрасывает число обновлений Count в ноль. После этапа S208 настоящая процедура управления заканчивается.
Другие варианты осуществления
Выше были объяснены предпочтительные варианты осуществления согласно настоящему изобретению, но настоящее изобретение не ограничивается этими вариантами осуществления и может быть скорректировано и изменено различными способами на языке формулы изобретения.
Например, во втором варианте осуществления, целевая функция J(w) может быть определена следующей формулой (7):

Здесь, PV является текущим значением для выходного значения "r" управления, в то время как "n" является значением больше нуля. Целевая функция J(w) конфигурируется как сумма члена, относящегося к величине корректировки целевого значения "r" (формула (1), правая сторона, первый член), и члена, относящегося к степени удовлетворения ограничивающих условий количественных параметров "y" состояния (формула (1), правая сторона, второй член).
В этом случае, член, относящийся к величине корректировки целевого значения "r", является компонентом, который становится тем больше, чем больше величина корректировки целевого значения "r", и равен квадрату величины корректировки целевого значения "r". Отметим, что этот компонент может быть значением, полученным умножением величины корректировки целевого значения "r" на предварительно определенный коэффициент.
С другой стороны, член, относящийся к степени удовлетворения ограничивающих условий, является значением, полученным делением компонента, который становится тем больше, чем ниже степень удовлетворения ограничивающих условий (S12+S22+...), на компонент, который становится тем больше, чем больше разница между целевым значением "r" и текущим значением для выходного значения "x" управления ((|r-PV|)n). В этом случае, если разница между целевым значением "r" и текущим значением для выходного значения "x" управления является относительно большой, по сравнению с тем, если разница между целевым значением "r" и текущим значением для выходного значения "x" управления является относительно небольшой, степень вклада члена, относящегося к степени удовлетворения ограничивающих условий, в значение целевой функции J(w) становится меньшей. Другими словами, если разница между целевым значением "r" и текущим значением для выходного значения "x" управления является относительно большой, по сравнению с тем, когда разница между целевым значением "r" и текущим значением для выходного значения "x" управления является относительно небольшой, степень вклада члена, относящегося к величине корректировки целевого значения "r", в значение целевой функции J(w) становится большей.
В вышеприведенной формуле (7) компонент, который становится тем больше, чем ниже степень удовлетворения ограничивающих условий, является суммой квадратов функций штрафа. Однако, этот компонент может быть суммой функций штрафа и т.д.
Дополнительно, в вышеприведенной формуле (7) компонент, который становится тем больше, чем больше разница между целевым значением "r" и текущим значением для выходного значения "x" управления, является "n" степенью разницы между целевым значением "r" и текущим значением PV. Однако, этот компонент может быть значением, полученным умножением разницы между целевым значением "r" и текущим значением PV на предварительно определенный коэффициент.
Дополнительно, если силовая установка 6 является двигателем внутреннего сгорания, степень эффекта при изменении значения "n" в вышеприведенной формуле (7) является аналогичной результату, такому как показан на фиг. 7. По этой причине, даже когда целевая функция вышеприведенной формулы (7) используется с тем, чтобы вычислять скорректированное целевое значение "w", предпочтительно устанавливать "n" в значение от 4 до 6. При этом, возможно уменьшать нагрузку обработки эталонного регулятора 30, в то же время эффективно улучшая перерегулирование и отклик выходного значения "x" управления.
Дополнительно, система управления силовой установкой в настоящем варианте осуществления может быть применена к любому типу силовой установки, предоставляющей возможность оценки будущего прогнозного значения количественного параметра состояния выходного значения управления. Например, силовая установка 6 может быть дизельным двигателем, а выходное значение "x" управления может быть давлением наддува. В этом случае, внешнее входное значение "d" является скоростью двигателя и объемом впрыска топлива, в то время как входное значение "u" управления является степенью открытия регулируемого сопла, предусмотренного в турбине турбонагнетателя.
Дополнительно, силовая установка 6 может быть дизельным двигателем, а выходное значение "x" управления может быть давлением наддува и EGR-пропорцией. В этом случае, внешнее входное значение "d" является скоростью двигателя и объемом впрыска топлива, в то время как входное значение "u" управления является степенью открытия регулируемого сопла, степенью открытия дроссельной заслонки и степенью открытия EGR-клапана. Дополнительно, силовая установка может быть двигателем внутреннего сгорания, отличным от дизельного двигателя, таким как бензиновый двигатель, транспортное средство, станок и т.д.
Перечень ссылочных позиций
2 - часть вычисления целевого значения
3 - часть корректировки целевого значения
5 - контроллер обратной связи
6 - силовая установка


Изобретение относится к управлению транспортным средством, в частности, для определения целевого значения параметра управления, например отношения рециркуляции отработавших газов (EGR). Техническим результатом является пресечение перерегулирования выходного значения управления, в то же время пресекая ухудшение отклика выходного значения управления, если выполняется приближение выходного значения управления к целевому значению. Предложена система управления силовой установкой транспортного средства, содержащая средство (2) вычисления целевого значения (r) для выходного значения (x) управления силовой установкой (6), средство (3) корректировки целевого значения с тем, чтобы вычислять скорректированное целевое значение (w), и контроллер (5) обратной связи, определяющий входное значение управления. Средство (3) корректировки целевого значения, если выполняется изменение выходного значения управления в целевое значение, устанавливает скорректированное целевое значение так, что величина корректировки целевого значения становится равной или меньше предварительно определенного значения, затем изменяет скорректированное целевое значение так, что величина корректировки целевого значения становится больше предварительно определенного значения, затем изменяет скорректированное целевое значение так, что величина корректировки целевого значения становится равной или меньше предварительно определенного значения, прежде чем выходное значение управления достигает целевого значения. 6 з.п. ф-лы, 9 ил.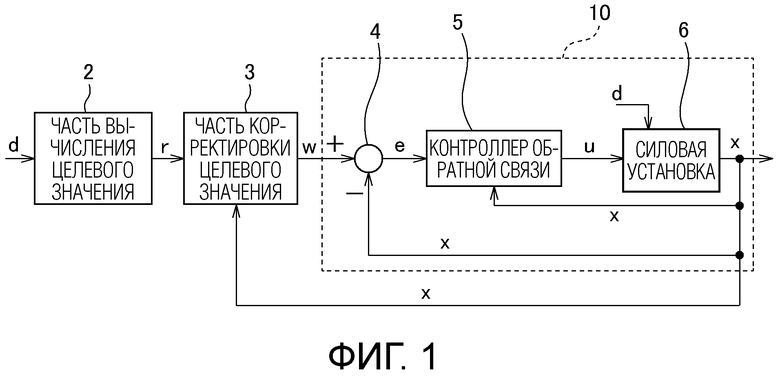
1. Система управления силовой установкой, содержащая:
часть вычисления целевого значения, выполненную с возможностью вычисления целевого значения для выходного значения управления силовой установкой на основе одного или более предварительно определенных параметров силовой установки;
часть корректировки целевого значения, выполненную с возможностью корректирования целевого значение в направлении пресечения перерегулирования выходного значения управления, чтобы вычислять скорректированное целевое значение; и
контроллер обратной связи, выполненный с возможностью определения входного значения управления силовой установкой таким образом, чтобы выходное значение управления приближалось к скорректированному целевому значению;
при этом часть корректировки целевого значения выполнена с возможностью, если выполняется изменение выходного значения управления в целевое значение, установки скорректированного целевого значения таким образом, что величина корректировки целевого значения становится равной или меньше предварительно определенного значения, затем изменения скорректированного целевого значения таким образом, что величина корректировки целевого значения становится больше указанного предварительно определенного значения, затем изменения скорректированного целевого значения таким образом, что величина корректировки целевого значения становится равной или меньше указанного предварительно определенного значения, прежде чем выходное значение управления достигает целевого значения.
2. Система управления силовой установкой по п. 1, в которой часть корректировки целевого значения выполнена с возможностью, если выполняется изменение выходного значения управления в целевое значение, установления скорректированного целевого значения таким образом, что величина корректировки целевого значения становится равной или меньше предварительно определенного значения, когда разница целевого значения и текущего значения для выходного значения управления больше первого контрольного значения, изменения скорректированного целевого значения таким образом, что величина корректировки целевого значения становится больше предварительно определенного значения, когда разница достигает первого контрольного значения, и изменения скорректированного целевого значения таким образом, что величина корректировки целевого значения становится равной или меньше предварительно определенного значения, когда разница достигает второго контрольного значения, при этом второе контрольное значение меньше первого контрольного значения.
3. Система управления силовой установкой по п. 1, в которой
часть корректировки целевого значения выполнена с возможностью выполнения поиска минимального значения целевой функции, чтобы тем самым вычислять скорректированное целевое значение, и
целевая функция включает в себя член, относящийся к величине корректировки целевого значения, и член, относящийся к степени удовлетворения ограничивающих условий, относящихся к количественному параметру состояния силовой установки, и конфигурируется так, что, когда разница целевого значения и текущего значения для выходного значения управления является относительно большой, по сравнению с тем, когда разница является относительно небольшой, степень вклада члена, относящегося к величине корректировки целевого значения, в значение целевой функции становится больше.
4. Система управления силовой установкой по п. 3, в которой член, относящийся к величине корректировки целевого значения, является значением, полученным умножением компонента, который становится тем больше, чем больше величина корректировки целевого значения, на компонент, который становится тем больше, чем больше разница.
5. Система управления силовой установкой по п. 3, в которой член, относящийся к степени удовлетворения ограничивающих условий, является значением, полученным делением компонента, который становится тем больше, чем ниже степень удовлетворения ограничивающих условий, на компонент, который становится тем больше, чем больше разница.
6. Система управления силовой установкой по п. 4 или 5, в которой компонент, который становится тем больше, чем больше разница, является "n" степенью различия, и "n" больше нуля.
7. Система управления силовой установкой по п. 6, в которой силовая установка является двигателем внутреннего сгорания, а "n" является значением от 4 до 6.
| US 2015356413 A1, 2015-12-10 | |||
| US 2017260920 A1, 2017-09-14 | |||
| JP 2015113804 A, 2015-06-22 | |||
| СИСТЕМА УПРАВЛЕНИЯ ДВИГАТЕЛЕМ И СПОСОБ УПРАВЛЕНИЯ ДАННОЙ СИСТЕМОЙ | 2005 |
|
RU2383758C2 |

