Область техники
[0001]
Настоящее изобретение относится к способу и устройству помощи при вождении для транспортного средства с автоматизированным вождением, которое способно переключаться между ручным вождением водителем и автоматизированным вождением, изучает характеристики вождения водителя во время ручного вождения и отражает результат изучения на характеристики вождения под управлением автоматизированного вождения.
УРОВЕНЬ ТЕХНИКИ
[0002]
В предшествующем уровне техники патентная литература 1 была раскрыта как устройство управления вождением, которое изучает операции вождения водителем во время ручного вождения, чтобы подавить чувство дискомфорта водителя во время автоматизированного вождения. Устройство управления вождением, раскрытое в патентной литературе 1, устанавливает элементы окружающей среды, такие как число полос движения и погода. Затем, во время ручного вождения, устройство управления вождением идентифицирует среду вождения на основе элементов окружающей среды и изучает операции вождения водителя в связи со средой вождения.
СПИСОК БИБЛИОГРАФИЧЕСКИХ ССЫЛОК
ПАТЕНТНАЯ ЛИТЕРАТУРА
[0003]
Патентная литература 1: Публикация заявки на патент Японии № 2015–89801
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
ТЕХНИЧЕСКАЯ ПРОБЛЕМА
[0004]
Однако вышеописанное традиционное устройство управления вождением непосредственно применяет результат изучения от водителя к управлению автоматизированным вождением и не учитывает характеристики вождения области движения. В этом случае, если характеристики вождения водителя отличаются от характеристик вождения области, в которой используется автоматизированное вождение, или если область, в которой изучаются характеристики вождения, отличается от области, в которой используется автоматизированное вождение, транспортное средство с автоматизированным вождением ведет себя иначе, чем окружающие транспортные средства. Это создает проблему, когда пользователь транспортного средства с автоматизированным вождением чувствует себя неуверенно.
[0005]
Настоящее изобретение предлагается в свете вышеописанных обстоятельств, и задача настоящего изобретения состоит в том, чтобы предоставить способ помощи при вождении и устройство помощи при вождении, которые могут препятствовать тому, чтобы пользователь чувствовал себя неуверенно из–за поведения транспортного средства с автоматизированным вождением, отличающегося от тех окружающих транспортных средств.
РЕШЕНИЕ ПРОБЛЕМЫ
[0006]
Чтобы решить вышеописанную проблему, способ помощи при вождении и устройство помощи при вождении в соответствии с аспектом настоящего изобретения обнаруживают характеристики вождения области, в которой движется транспортное средство с автоматизированным вождением, корректируют результат изучения в соответствии с обнаруженными характеристиками вождения области, и выполняют управление автоматизированным вождением на основе скорректированного результата изучения.
ПРЕИМУЩЕСТВА ИЗОБРЕТЕНИЯ
[0007]
В соответствии с настоящим изобретением можно предотвращать чувство неуверенности пользователя, подавляя поведение транспортного средства с автоматизированным вождением, отличающееся от окружающих транспортных средств.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0008]
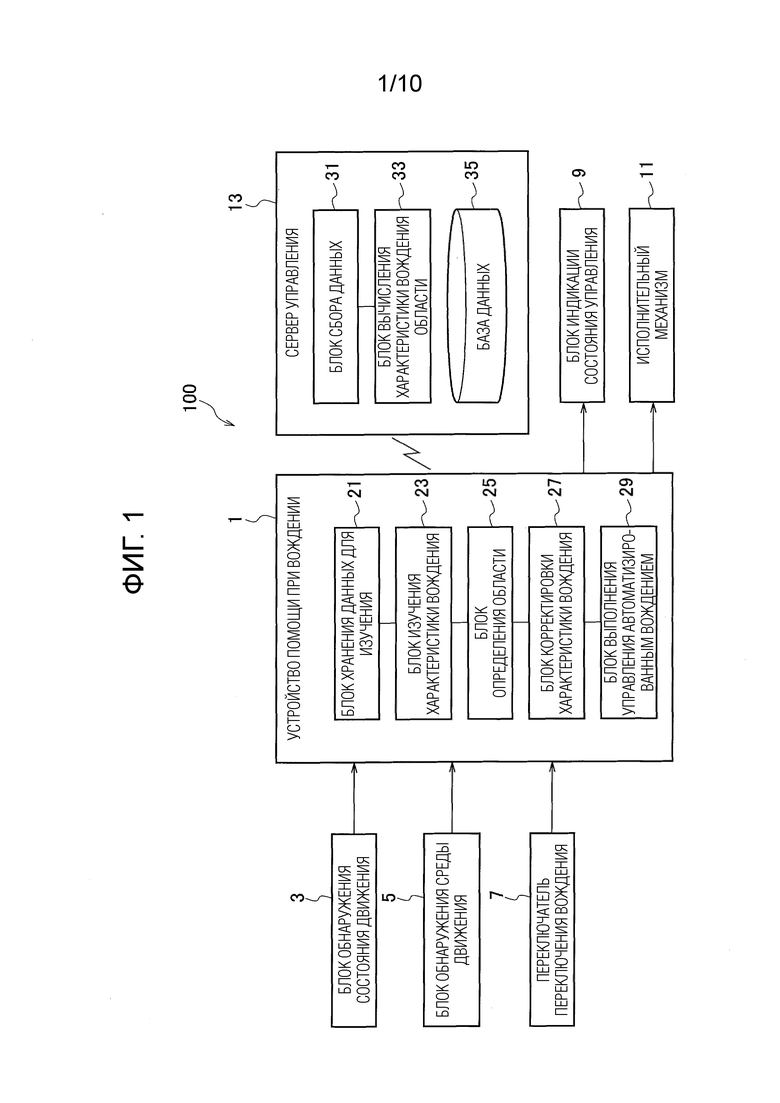
[Фиг. 1] Фиг. 1 является блок–схемой, показывающей конфигурацию системы помощи при вождении, которая включает в себя устройство помощи при вождении согласно варианту осуществления настоящего изобретения.
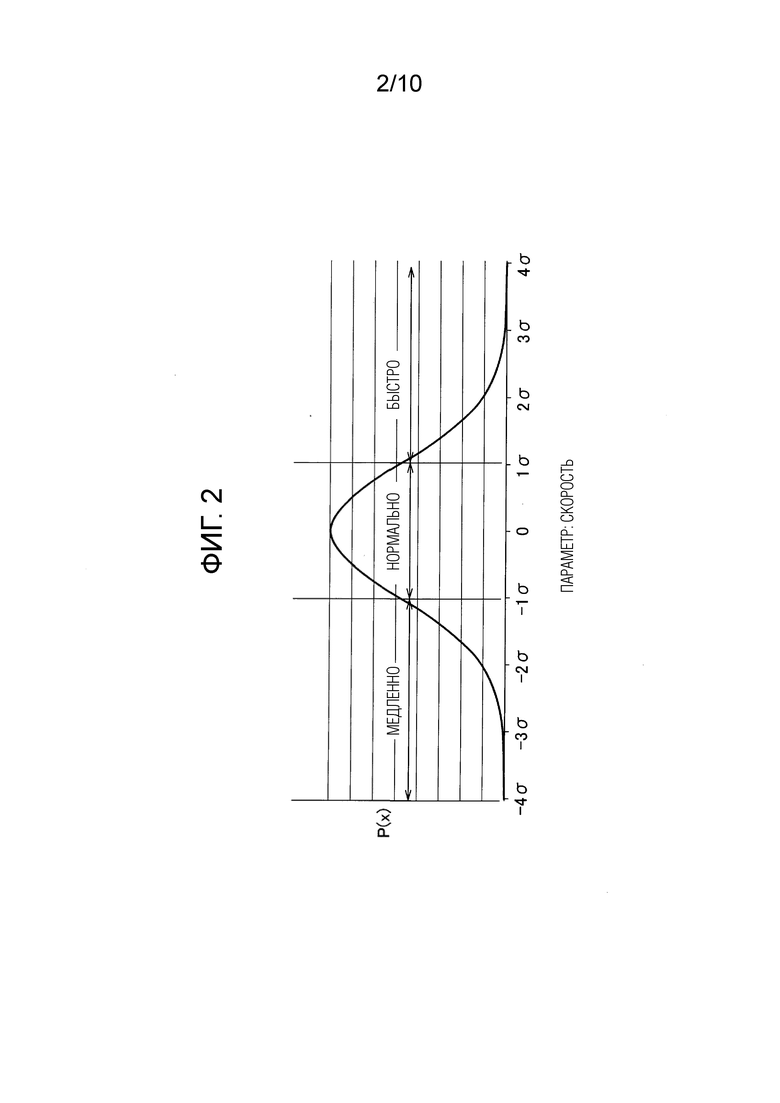
[Фиг. 2] Фиг. 2 - схема, представляющая пример характеристик вождения области, вычисленных системой помощи при вождении в соответствии с вариантом осуществления настоящего изобретения.
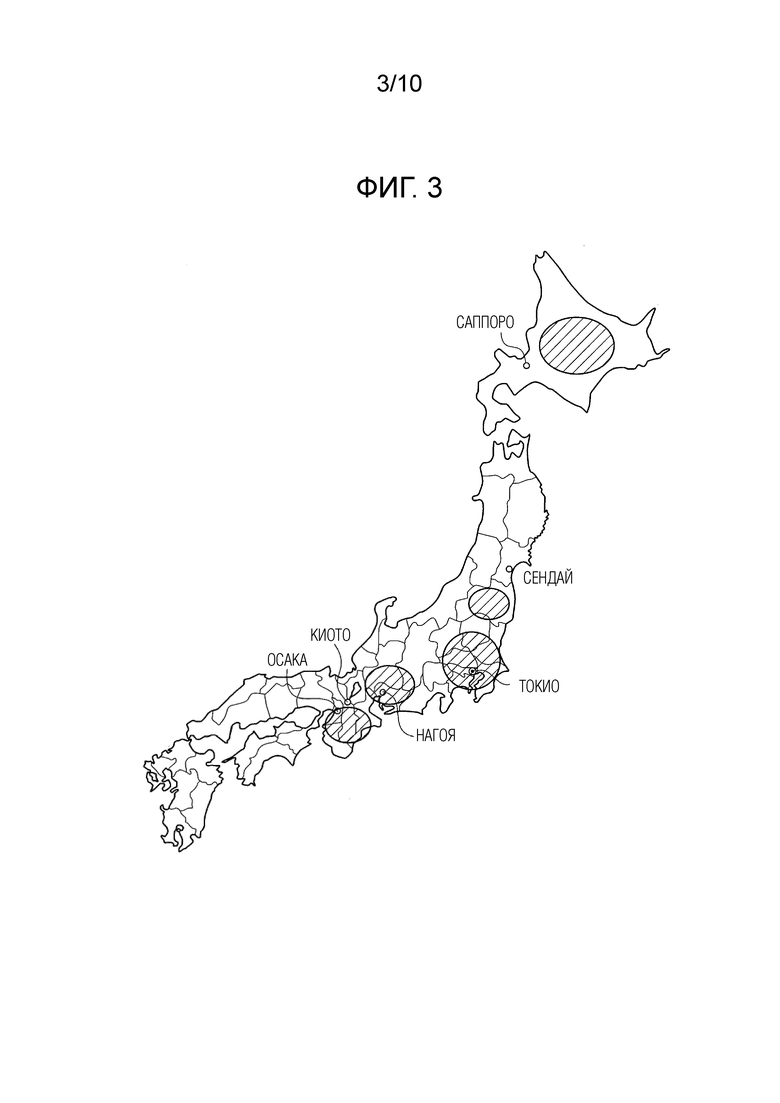
[Фиг. 3] Фиг. 3 – схема для описания того, как делить области посредством системы помощи при вождении согласно варианту осуществления настоящего изобретения.
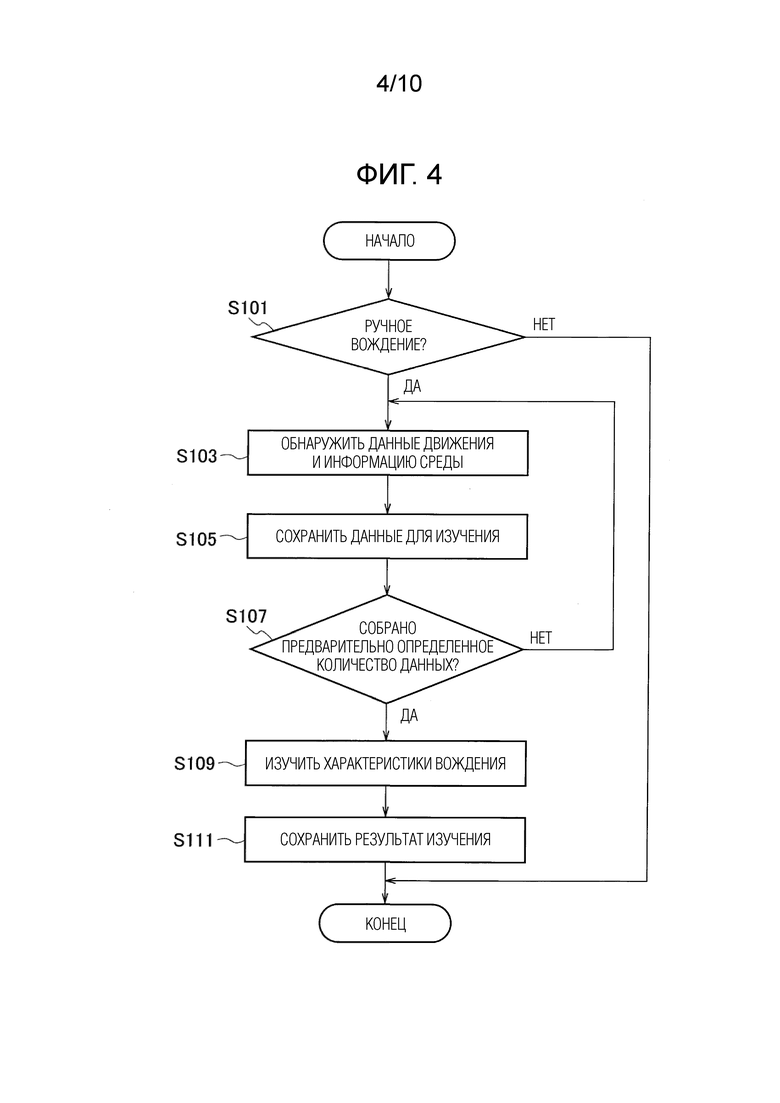
[Фиг. 4] Фиг. 4 – блок–схема последовательности операций, показывающая процедуру обработки изучения характеристики вождения устройством помощи при вождении в соответствии с вариантом осуществления настоящего изобретения.
[Фиг. 5] Фиг. 5 - схема, представляющая пример данных, введенных посредством обработки изучения характеристики вождения в соответствии с вариантом осуществления настоящего изобретения.
[Фиг. 6] Фиг. 6 – схема для описания коэффициентов множественного регрессионного анализа, выполняемого при обработке изучения характеристики вождения согласно варианту осуществления настоящего изобретения.
[Фиг. 7] Фиг.7 - схема, представляющая пример данных, введенных посредством обработки изучения характеристики вождения в соответствии с вариантом осуществления настоящего изобретения.
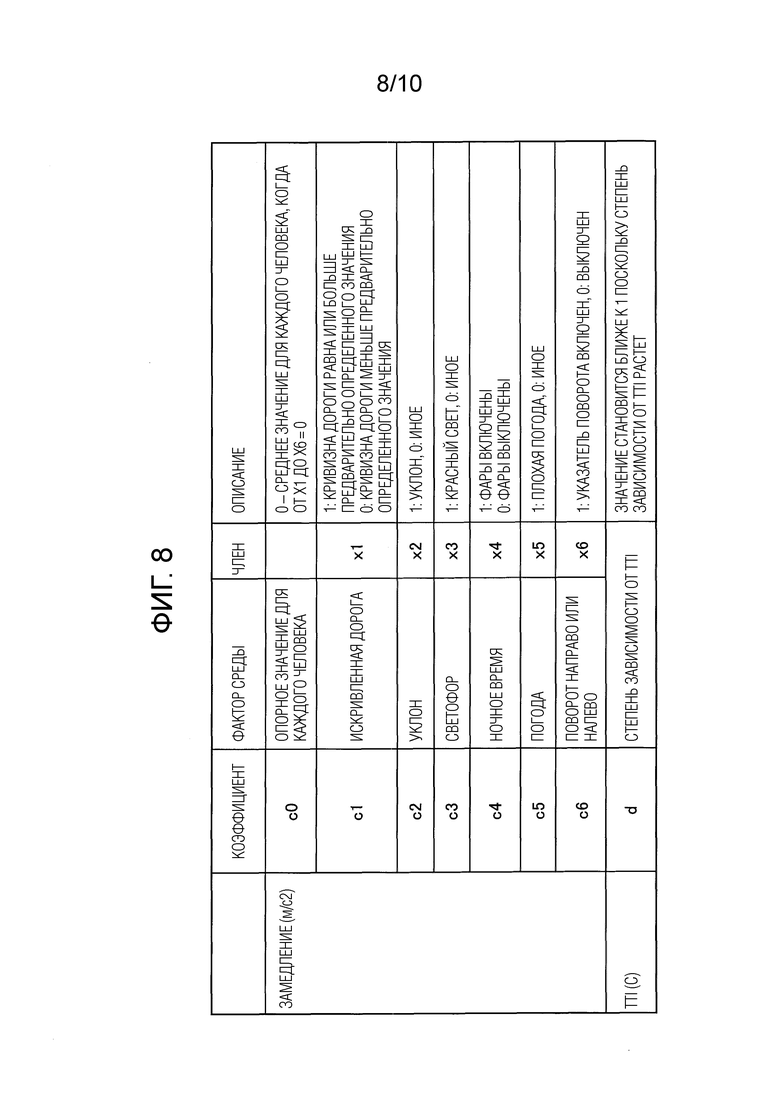
[Фиг. 8] Фиг. 8 – схема для описания коэффициентов множественного регрессионного анализа, выполняемого при обработке изучения характеристики вождения согласно варианту осуществления настоящего изобретения.
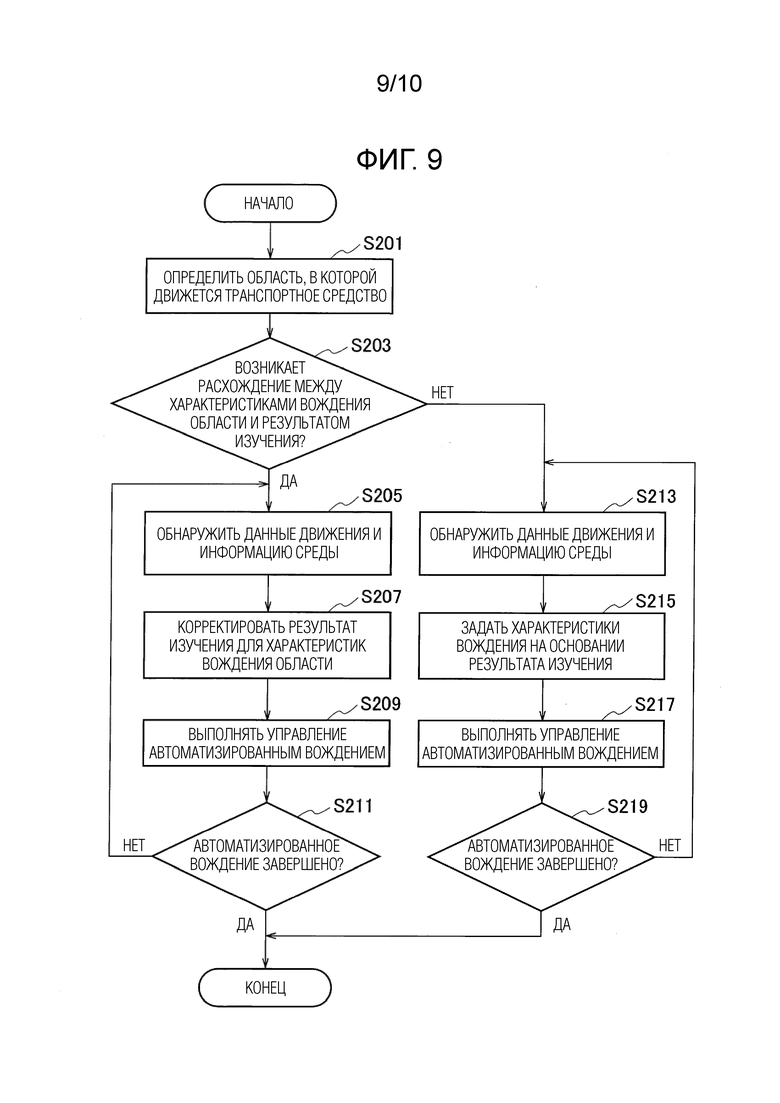
[Фиг. 9] Фиг.9 – это блок–схема последовательности операций, показывающая процедуру обработки управления автоматизированным вождением устройством помощи при вождении согласно варианту осуществления настоящего изобретения.
[Фиг. 10] Фиг. 10 - схема, предназначенная для описания обработки корректировки результата изучения при обработке изучения характеристики вождения в соответствии с вариантом осуществления настоящего изобретения для характеристик вождения области.
Описание вариантов осуществления
[0009]
Вариант осуществления, к которому применяется настоящее изобретение, описан ниже со ссылкой на чертежи.
[0010]
[Конфигурация системы помощи при вождении]
Фиг.1 – это блок–схема, показывающая конфигурацию системы помощи при вождении, которая включает в себя устройство помощи при вождении согласно этому варианту осуществления. Как показано на фиг.1, система 100 помощи при вождении в соответствии с этим вариантом осуществления установлена в транспортном средстве с автоматизированным вождением и включает в себя устройство 1 помощи при вождении, блок 3 обнаружения состояния движения, блок 5 обнаружения среды движения, переключатель 7 переключения вождения и блок 9 индикации состояния управления. Кроме того, система 100 помощи при вождении соединена с исполнительным механизмом 11, установленным в транспортном средстве, и подключена к серверу 13 управления через сеть связи.
[0011]
Устройство 1 помощи при вождении представляет собой контроллер, который способен переключаться между ручным вождением водителем и управлением автоматизированным вождением и который выполняет обработку изучения характеристик вождения водителя во время ручного вождения и отражает результат изучения на характеристики вождения под управлением автоматизированным вождением. В частности, устройство 1 помощи при вождении обнаруживает характеристики вождения области, в которой движется транспортное средство с автоматизированным управлением, корректирует результат изучения в соответствии с обнаруженными характеристиками вождения области и выполняет управление автоматизированным вождением на основе скорректированного результата изучения. Устройство 1 помощи при вождении в данном документе включает в себя блок 21 хранения данных для изучения, блок 23 изучения характеристики вождения, блок 25 определения области, блок 27 корректировки характеристики вождения и блок 29 выполнения управления автоматизированным вождением. В этом варианте осуществления описан случай, когда устройство 1 помощи при вождении установлено в транспортном средстве с автоматизированным вождением; однако устройство 1 помощи при вождении может быть расположено на внешнем сервере с устройством связи, расположенным в транспортном средстве.
[0012]
Следует отметить, что ручное вождение в этом варианте осуществления является вождением, которое позволяет транспортному средству двигаться с операциями водителя. С другой стороны, автоматизированное вождение в этом варианте осуществления заключается в том, что транспортное средство движется с чем–то, кроме водителя, участвующим в рулевом управлении, акселераторе и тормозе. Автоматизированное вождение включает в себя не только управление автоматизированным вождением, которое позволяет путешествовать без операций со стороны водителя, но также управление поддержанием скорости транспортного средства, управление предотвращением выезда с полосы движения и управление следованием за предыдущим транспортным средством. Кроме того, автоматизированное вождение также включает в себя управление для принятия вмешательства вождения пользователя (перекрытие).
[0013]
Вождение в случае, когда функция содействия операции вождения активна посредством управления динамикой транспортного средства (VDC) или электроусилителем рулевого управления (EPS), может быть задано как ручное вождение или нет. Если вождение в случае, когда функция помощи операции вождения активна посредством VDC или EPS, установлено как ручное вождение, объемы операций водителем и значения команд управления, основанные на объемах операций водителем, могут быть использованы в качестве характеристик вождения водителя. И наоборот, объемы операций и значения команд управления посредством помощи при операции вождения могут использоваться в качестве характеристик вождения водителя. Кроме того, объемы операций и значений команд управления как водителем, так и посредством помощи при операции вождения, или характеристики вождения транспортного средства могут быть изучены как характеристики вождения водителя. С другой стороны, если вождение в случае, когда функция помощи при операции вождения активна, не установлено как ручное вождение, можно отдельно изучить случай, когда функция помощи при операции вождения неактивна. В этом случае выбирается сцена, в которой возможно стабильное изучение, что позволяет точно изучить характеристики вождения водителя.
[0014]
Блок 3 обнаружения состояния движения обнаруживает данные о движении, указывающие состояние движения транспортного средства, такие как скорость транспортного средства, угол поворота при рулении, ускорение, расстояние между транспортными средствами до предыдущего транспортного средства, скорость относительно предыдущего транспортного средства, текущее местоположение состояние освещения фар, состояние отображения указателя поворота, состояние работы дворников и так далее. Например, блок 3 обнаружения состояния движения является сетью в транспортном средстве, такой как сеть контроллеров (CAN), навигационное устройство, лазерный радар, камера или тому подобное.
[0015]
Блок 5 обнаружения среды движения обнаруживает информацию среды, указывающую среду, в которой движется транспортное средство, такую как количество полос движения по дороге, по которой движется транспортное средство, ограничение скорости, уклон дороги, состояние отображения светофора впереди транспортного средства, расстояние до перекрестка впереди транспортного средства, количество транспортных средств, движущихся впереди транспортного средства, запланированный курс на перекрестке впереди транспортного средства и т.д. Кроме того, кривизна дороги, наличие или отсутствие ограничения остановки и тому подобное могут быть обнаружены в качестве информации среды. Например, блок 5 обнаружения среды движения представляет собой камеру, лазерный радар или навигационное устройство, установленное в транспортном средстве. Запланированный курс на перекрестке впереди транспортного средства получается, например, из навигационного устройства или состояния отображения указателя поворота. Кроме того, освещенность, температура и состояние погоды вокруг транспортного средства получаются из датчика освещенности, датчика температуры окружающей среды и переключателя стеклоочистителей соответственно. Обратите внимание, что освещенность также может быть получена от переключателя фар.
[0016]
Переключатель 7 переключения вождения является переключателем, который установлен в транспортном средстве и управляется пользователем транспортного средства для выполнения переключения между управлением автоматизированным вождением и ручным вождением. Например, переключатель 7 переключения вождения расположен на рулевом колесе транспортного средства.
[0017]
Блок 9 индикации состояния управления отображает, является ли текущее состояние управления ручным вождением или управлением автоматизированным вождением на блоке отображения измерителя, экране дисплея навигационного устройства, дисплее на ветровом стекле или тому подобном. Кроме того, блок 9 индикации состояния управления также выводит звуки уведомлений, чтобы сообщить начало и конец управления автоматизированным вождением, чтобы указать, заканчивается ли изучение характеристик вождения.
[0018]
Исполнительный механизм 11 принимает инструкцию по выполнению от устройства 1 помощи при вождении и приводит в движение такие детали, как акселератор, тормоз, рулевое управление и т.п. транспортного средства.
[0019]
Сервер 13 управления является сервером зондов, расположенным в центре обработки данных системы зондирующих автомобилей, и собирает данные зондов от многих транспортных средств для вычисления и накопления характеристик вождения каждой области.
[0020]
Сервер 13 управления включает в себя блок 31 сбора данных, блок 33 вычисления характеристики вождения области и базу 35 данных. Блок 31 сбора данных собирает данные зонда от многих транспортных средств через сеть связи. В этом процессе, поскольку блок 31 сбора данных обнаруживает область данных, которые должны быть собраны, можно классифицировать данные в соответствии с областью при сборе.
[0021]
Блок 33 вычисления характеристики вождения области использует данные, собранные блоком 31 сбора данных, для расчета характеристик вождения каждой области. На основе собранных данных блок 33 вычисления характеристики вождения области вычисляет статистическое значение, такое как средние значения и стандартные отклонения параметров, таких как расстояние между транспортными средствами, время торможения (тормозной путь), скорость, ускорение, временной интервал и так далее для каждой области. Характеристики вождения области обозначены распределением вероятностей, как показано на фиг. 2, и рассчитаны для каждого параметра и каждой области. Например, характеристики движения на фиг. 2 являются характеристиками вождения в случае, когда параметром является скорость, и в этом случае диапазон ± 1σ является нормальным диапазоном, диапазон +1σ или более является диапазоном, в котором водитель имеет тенденцию двигаться в спешке, и диапазон –1σ или меньше – это диапазон, в котором водитель имеет тенденцию двигаться медленно. Области могут быть разделены на административные единицы. Например, единица – это страна, штат, префектура, город, деревня или тому подобное. Кроме того, области, имеющие сходные характеристики вождения, могут быть определены как одна область. Например, в результате вычисления характеристик вождения области, имеющие тенденцию к нетерпеливому вождению, могут быть определены как одна область.
[0022]
База 35 данных накапливает собранные данные зонда, а также хранит характеристики вождения области, вычисленные блоком 33 вычисления характеристик вождения области.
[0023]
Далее описаны блоки, составляющие устройство 1 помощи при вождении. Блок 21 хранения данных для изучения получает данные движения о состоянии движения транспортного средства и информацию среды о среде движения вокруг транспортного средства из блока 3 обнаружения состояния движения и блока 5 обнаружения среды движения и сохраняет данные, требуемые для обработки изучения характеристики вождения. В частности, блок 21 хранения данных для изучения сохраняет данные движения, используемые для изучения расстояния между транспортными средствами, тормозного пути и т.д. во время ручного вождения. В этом процессе блок 21 хранения данных для изучения сохраняет данные движения в связи с состоянием движения и средой движения транспортного средства. В дополнение к скорости и расстоянию между транспортными средствами, данные движения, которые должны быть сохранены, включают в себя такие данные, как текущее местоположение, скорость относительно предыдущего транспортного средства, угол поворота при рулении, замедление, продолжительность времени следования за предыдущим транспортным средством, скорость в начале замедления, тормозной путь, объемы операций педали тормоза и педали акселератора, расстояние до линии остановки и т.д. Кроме того, блок 21 хранения данных для изучения также хранит информацию среды. Информация среды включает в себя количество полос движения дороги, по которой движется транспортное средство, ограничение скорости, уклон дороги или состояние отображения светофора, расстояние от транспортного средства до перекрестка, количество транспортных средств впереди транспортного средства, состояние отображения указателя поворота, кривизну дороги, наличие или отсутствие ограничения остановки, погоду, температуру или освещенность вокруг транспортного средства и так далее.
[0024]
Блок 23 изучения характеристики вождения считывает данные движения, хранящиеся в блоке 21 хранения данных для изучения, и изучает характеристики вождения водителя во время ручного вождения с учетом степени влияния состояния движения и среды движения. В дополнение к расстоянию между транспортными средствами до предыдущего транспортного средства и времени торможения (тормозной путь) изучаемые характеристики вождения включают в себя скорость, ускорение, временной интервал и так далее. Временной интервал представляет собой разницу между временем, в которое рассматриваемое транспортное средство начинает поворачивать направо на перекрестке, и временем, в которое встречное транспортное средство достигает перекрестка, или представляет собой разницу между временем, в которое рассматриваеоме транспортное средство въезжает на перекресток, имеющий ограничение остановки, и временем, в которое пересекающееся транспортное средство въезжает на перекресток. Рассчитанные таким образом результаты изучения сохраняются в блоке 23 изучения характеристики вождения всякий раз, когда это необходимо.
[0025]
Блок 25 определения области получает текущее местоположение транспортного средства из блока 21 хранения данных для изучения и определяет область, в которой транспортное средство в настоящее время движется, на основании текущего местоположения транспортного средства. Область, подлежащая определению, может быть разделена на административные единицы. Например, единица – это страна, штат, префектура, город, деревня или тому подобное. В частности, ограничение скорости может быть изменено при пересечении границы стран. В таком случае, поскольку характеристики вождения, вероятно, будут изменены в зависимости от стран, для области, включающей в себя несколько соседних стран, эффективно определять страны как одну область. Области, имеющие сходные характеристики вождения, могут быть определены как одна область. Например, в Японии область Канто, область Нагоя, область Кансай и т.п. может быть определена как одна область, как показано на фиг.3. При таком способе деления в результате изучения характеристик вождения области, не имеющие различий в распределении поведения при вождении, определяются как одна область.
[0026]
Блок 27 корректировки характеристики вождения обнаруживает характеристики вождения для области, которая определена блоком 25 определения области, в качестве области, в которой в данный момент движется транспортное средство с автоматизированным вождением, и корректирует результат изучения характеристик вождения, полученных с помощью блока 23 изучения характеристики вождения в соответствии с обнаруженными характеристиками вождения области. Например, когда между характеристиками вождения области и результатом изучения возникает предварительно определенное расхождение, результат изучения характеристик вождения области корректируется так, чтобы он был ближе к характеристикам вождения области. Характеристики вождения области могут быть получены с сервера 13 управления, который является внешним сервером, через устройство связи или могут быть заранее сохранены в блоке 27 корректировки характеристики вождения. Вычисление характеристик вождения области может быть выполнено в устройстве 1 помощи при вождении вместо использования сервера 13 управления.
[0027]
Корректировка результата изучения не ограничивается прямой корректировкой характеристик вождения (например, изменением значения команды управления для изменения средней скорости транспортного средства с 30 км/ч до 40 км/ч), и характеристики вождения могут быть скорректированы косвенно путем обработки данных движения (данные движения обрабатываются, например, путем выбора данных для генерации характеристик вождения или корректировки диапазона данных, который должен использоваться для генерирования значения команды управления для изменения средней скорости транспортного средства с 30 км/ч до 40 км/ч).
[0028]
При въезде на участок автоматизированного вождения или когда водитель выбирает управление автоматизированным вождением с помощью переключателя 7 переключения вождения, блок 29 выполнения управления автоматизированным вождением выполняет управление автоматизированным вождением. В этом процессе блок 29 выполнения управления автоматизированным вождением выполняет управление автоматизированным вождением на основе результата изучения, откорректированного блоком 27 корректировки характеристики вождения.
[0029]
Устройство 1 помощи при вождении включает в себя электронную схему общего назначения, включающую в себя микрокомпьютер, микропроцессор, центральный процессор и периферийное устройство, такое как память. При выполнении конкретной программы устройство 1 помощи при вождении работает как вышеописанный блок 21 хранения данных для изучения, блок 23 изучения характеристики вождения, блок 25 определения области, блок 27 корректировки характеристики вождения и блок 29 выполнения управления автоматизированным вождением. Функции устройства 1 помощи при вождении могут быть реализованы одной или несколькими схемами обработки. Например, схемы обработки включают в себя запрограммированное устройство обработки, такое как устройство обработки, включающее в себя электрическую схему, и схемы обработки также включают в себя устройства, такие как специализированная интегральная схема (ASIC), адаптированная для выполнения функций, описанных в варианте осуществления, и обычный схемный компонент.
[0030]
[Процедура обработки изучения характеристики вождения]
Далее со ссылкой на блок–схему последовательности операций на фиг.4 описана процедура обработки изучения характеристики вождения устройством 1 помощи при вождении согласно этому варианту осуществления. Обработка изучения характеристики вождения, показанная на фиг.4, начинается, когда зажигание транспортного средства включено.
[0031]
Как показано на фиг.4, сначала на этапе S101 блок 21 хранения данных для изучения определяет, находится ли транспортное средство в режиме ручного вождения, на основании состояния переключателя 7 переключения вождения. Когда транспортное средство находится в режиме ручного вождения, процесс переходит к этапу S103, и когда транспортное средство находится в режиме автоматизированного вождения, обработка изучения характеристики вождения заканчивается, и выполняется управление автоматизированным вождением.
[0032]
На этапе S103 блок 21 хранения данных для изучения обнаруживает данные движения о состоянии движения транспортного средства и информацию среды о среде движения вокруг транспортного средства из блока 3 обнаружения состояния движения и блока 5 обнаружения среды движения. Данные движения, которые должны быть обнаружены, включают в себя скорость транспортного средства, угол поворота при рулении, ускорение, замедление, расстояние между транспортными средствами до предыдущего транспортного средства, скорость относительно предыдущего транспортного средства, текущее местоположение, запланированный курс на перекрестке впереди транспортного средства, количества операций педали тормоза и педали акселератора, продолжительность следования после предыдущего транспортного средства, рабочего состояния дворников и так далее. Для информации среды: число полос движения по дороге, по которой движется транспортное средство, ограничение скорости, уклон дороги или состояние отображения светофора, расстояние от транспортного средства до перекрестка, количество транспортных средств впереди транспортного средства, состояние отображения указателя поворота транспортного средства, погода, температура или освещенность вокруг транспортного средства и так далее.
[0033]
На этапе S105 блок 21 хранения данных для изучения сохраняет данные движения и информацию среды, обнаруженные на этапе S103, в качестве данных для изучения.
[0034]
Пример данных для изучения, хранящихся в блоке 21 хранения данных для изучения, показан на фиг.5. Как показано на фиг.5, фрагменты данных расстояния D между транспортными средствами, скорости V транспортного средства, от x1 до x6 и y1 записываются в данные для изучения. x1–x6 и y1 – данные, которые устанавливаются на основе информации среды, а значение 0 или 1 устанавливается в соответствии со способом настройки, показанным на фиг.6. Например, в случае, когда получены данные расстояния D между транспортными средствами и скорости V транспортного средства, показанные на фиг.5, для x1 значение 1 устанавливается, когда транспортное средство движется по дороге с двумя или более полосами движения на одной стороне, и значение 0 устанавливается, когда транспортное средство движется по дороге с одной полосой движения на одной стороне или уже.
[0035]
Для x2 значение 1 устанавливается, когда транспортное средство движется в гору, и значение 0 устанавливается в других случаях (ровная дорога или спуск), а для x3 значение 1 устанавливается, когда светофор впереди транспортного средства горит красным, а значение 0 устанавливается в других случаях (зеленый свет или отсутствие светофора). Стоит отметить, что красный свет может включать в себя желтый свет. Для x4 значение 1 устанавливается, когда расстояние от транспортного средства до перекрестка короче, чем предварительно определенное значение J [м], и значение 0 устанавливается, когда расстояние равно или превышает предварительно определенное значение J [м], и для x5 значение 1 устанавливается, когда количество транспортных средств в пределах L [m] впереди транспортного средства равно или превышает предварительно определенное значение N, и значение 0 устанавливается, когда количество транспортных средств равно или меньше предварительно определенного значения N–1. Для x6 значение 1 устанавливается, когда указатель поворота, используемый для поворота транспортного средства вправо или влево, включен, а значение 0 устанавливается, когда указатель поворота выключен. Кроме того, для y1 значение 1 устанавливается, когда расстояние от остановленного транспортного средства до линии остановки равно или превышает предварительно определенное значение K [m], и значение 0 устанавливается, когда расстояние короче, чем предварительно определенное значение K [m]. Как описано выше, в данных для изучения, показанных на фиг.5, фрагменты информации среды от x1 до x6 и y1 связаны с данными движения из расстояния D между транспортными средствами и скорости V транспортного средства.
[0036]
Другой пример данных для изучения, хранящихся в блоке 21 хранения данных для изучения, показан на фиг.7. Как показано на фиг.7, фрагменты данных тормозного пути Db, скорости в начале замедления Vb и от x1 до x6 записываются в данные для изучения. Тормозной путь Db – это тормозной путь в случае, когда транспортное средство останавливается на перекрестке, а скорость в начале замедления Vb – это скорость в начале замедления в случае, когда транспортное средство останавливается на перекрестке.
[0037]
х1–х6 на фиг.7 – данные, которые устанавливаются на основе информации среды, а значение 0 или 1 устанавливается в соответствии со способом настройки, показанным на фиг.8. Например, в случае, когда получены данные тормозного пути Db и скорости в начале замедления Vb, показанные на фиг.7, для x1 значение 1 устанавливается, когда кривизна дороги, по которой движется транспортное средство, равна или больше, чем заданное значение, и значение 0 устанавливается, когда кривизна меньше, чем заданное значение.
[0038]
Для x2 значение 1 устанавливается, когда транспортное средство движется под уклон, и значение 0 устанавливается в других случаях (ровная дорога или в гору), а для x3 значение 1 устанавливается, когда светофор впереди транспортного средства горит красным, а значение 0 устанавливается в других случаях (зеленый свет или отсутствие светофора). Стоит отметить, что красный свет может включать в себя желтый свет. Для x4 значение 1 устанавливается, когда это ночное время, и значение 0 устанавливается, когда это не ночное время. Определение того, наступило ли это в ночное время, может быть выполнено на основе состояния освещения фар. Для x5 значение 1 устанавливается, когда погода вокруг транспортного средства плохая, а 0 устанавливается, когда погода не плохая. Для способа определения того, является ли погода плохой, определяют, что это не плохая погода, когда стеклоочистители транспортного средства выключены или настроены на прерывистость, и определяют, что это плохая погода, когда стеклоочистители включены. Для x6 значение 1 устанавливается, когда указатель поворота, используемый для поворота транспортного средства вправо или влево, включен, а значение 0 устанавливается, когда указатель поворота выключен. Как описано выше, в данных для изучения, показанных на фиг.7, фрагменты информации среды от х1 до х6 связаны с данными о движении из тормозного пути Db и скорости в начале замедления Vb.
[0039]
На этапе S107 блок 21 хранения данных для изучения определяет, может ли быть сохранено заранее определенное количество данных для изучения, и когда хранимые данные для изучения меньше предварительно определенного количества, процесс возвращается к этапу S103, и когда предварительно определенное количество или более данных для изучения может быть накоплено, процесс переходит к этапу S109.
[0040]
На этапе S109 блок 23 изучения характеристики вождения изучает характеристики вождения водителя во время ручного вождения. Например, при изучении расстояния между транспортными средствами изучение выполняется путем создания модели множественной регрессии, выраженной следующим выражением (1), с использованием набора данных, показанного на фиг. 5.
[Мат. 1]
Df = (a0 + a1x1 + a2x2 + a3x3 + a4x4 + a5x5 + a6x6) Vf + (b0 + b1y1) (1)
В выражении (1) Vf – текущая скорость транспортного средства, а Df – расстояние между транспортными средствами до предыдущего транспортного средства, вычисленное из модели, x1–x6 и y1 – факторы среды, а a0–a6, b0 и b1 – коэффициенты, полученные в результате изучения. Член (от a0 до a6x6) в выражении (1) – это время между рассматриваемым транспортным средством и предыдущим движущимся транспортным средством (временной интервал без расстояния между остановленными транспортными средствами). Член (b0+b1y1) представляет собой расстояние между остановленными транспортными средствами, которое представляет собой расстояние между транспортными средствами между транспортным средством и предыдущим транспортным средством, когда скорости транспортных средств становятся равными нулю. Как описано выше, модель множественной регрессии, выраженная выражением (1), указывает, что расстояние между транспортными средствами до предыдущего транспортного средства и расстояние между остановленными транспортными средствами изменяются в зависимости от факторов среды.
[0041]
Среди коэффициентов в выражении (1), как показано на фиг. 6, а0 - опорное значение, которое устанавливается для каждой поездки, и это среднее значение временного интервала в поездке, когда значения от x1 до х6 равны 0. b0 – это опорное значение, которое устанавливается для каждого водителя и представляет собой расстояние между остановленными транспортными средствами в случае, когда значение y1 равно 0. Например, может использоваться среднее значение расстояния между остановленными транспортными средствами.
[0042]
Таким образом, блок 23 изучения характеристики вождения выполняет множественный регрессионный анализ, используя данные для изучения, как показано на фиг. 5, для вычисления коэффициентов от a0 до a6, b0 и b1 в выражении (1).
[0043]
При изучении тормозного пути изучение выполняется путем создания модели множественной регрессии, выраженной следующим выражением (2), с использованием набора данных, показанного на фиг. 7.
[Мат. 2]
Db = (c0 + c1x1 + c2x2 + c3x3 + c4x4 + c5x5 + c6x6) Vb2 + dVb (2)
В выражении (2) Vb – это скорость в начале замедления, а Db – тормозной путь, вычисленный из модели, x1–x6 – факторы среды, а c0–c6 и d – коэффициенты, полученные в результате изучения. Как описано выше, модель множественной регрессии, выраженная выражением (2), указывает, что тормозной путь транспортного средства, которое должно остановиться на перекрестке, варьируется в зависимости от факторов среды.
[0044]
Модель множественной регрессии выражения (2) может быть применена к другому типу поведения начала замедления. Как показано ниже, выражение (2) может быть выражено как выражение (3), а выражение (4) может быть получено из выражения (2) и выражения (3).
[Мат. 3]
Db=Vb2/2a+dVb (3)
[Мат. 4]
a=1/2(c0 + c1x1 + c2x2 + c3x3 + c4x4 + c5x5 + c6x6) (4)
[0045]
a представляет среднее замедление (м/с2) в выражениях (3) и (4), а d представляет TTI (время до пересечения: время до достижения пересечения при условии, что транспортное средство продолжает двигаться со скоростью в начале торможение) в выражениях (2) и (3).
[0046]
Среди коэффициентов в выражении (2), как показано на рис. 8, c0 и d являются опорными значениями, которые установлены для каждого человека. c0 – это среднее значение замедления, когда значения от x1 до x6 равны 0, а d – степень зависимости от TTI (то есть степень изменения замедления в зависимости от скорости). Значение, близкое к 1, устанавливается для d, поскольку степень зависимости от TTI выше.
[0047]
Таким образом, блок 23 изучения характеристики вождения выполняет множественный регрессионный анализ, используя данные для изучения, как показано на фиг. 7, для вычисления коэффициентов от c0 до c6 и d в выражении (2). Блок 23 изучения характеристики вождения вычисляет стандартные отклонения и средние значения параметров, чтобы получить распределение вероятности.
[0048]
На этапе S111 блок 23 изучения характеристики вождения сохраняет вычисленные коэффициенты от a0 до a6, b0 и b1 выражения (1) или вычисленные коэффициенты от c0 до c6 и d выражения (2) и распределения вероятностей параметров в качестве результата вычисления и завершает обработку изучения характеристики вождения согласно этому варианту осуществления.
[0049]
[Процедура обработки управления автоматизированным вождением]
Далее со ссылкой на блок–схему последовательности операций на фиг.9 описана процедура обработки управления автоматизированным вождением устройством 1 помощи при вождении согласно этому варианту осуществления.
[0050]
Как показано на фиг.9, на этапе S201 блок 25 определения области получает текущее местоположение транспортного средства из блока 21 хранения данных для изучения и определяет область, в которой транспортное средство в настоящее время движется, на основе текущего местоположения транспортного средства. Определяемая область может быть либо областью, разделенной на административные единицы, либо областью, имеющей сходные характеристики вождения.
[0051]
На этапе S203 блок 27 корректировки характеристики вождения обнаруживает характеристики вождения области, определенные на этапе S201, и сравнивает обнаруженные характеристики вождения области и результат изучения обработки изучения характеристики вождения, чтобы определить, возникает ли между ними предварительно определенное расхождение. Когда возникает предварительно определенное расхождение, процесс переходит к этапу S205, а когда расхождение не возникает, процесс переходит к этапу S213.
[0052]
Сначала описывается случай, когда возникает предварительно определенное расхождение. На этапе S205 блок 27 корректировки характеристики вождения обнаруживает данные движения о состоянии движения транспортного средства и информацию среды о среде движения вокруг транспортного средства из блока 3 обнаружения состояния движения и блока 5 обнаружения среды движения.
[0053]
На этапе S207 блок 27 корректировки характеристики вождения корректирует результат изучения обработки изучения характеристики вождения в соответствии с характеристиками вождения области. Например, как показано на фиг.10, приемлемый диапазон A устанавливается заранее для обнаруженной характеристики X вождения области. На фиг.10 диапазон от –1,5σ до +1,5σ установлен в качестве приемлемого диапазона. Затем, когда результаты изучения Y1 и Y2 находятся за пределами приемлемого диапазона A, и определяется, что возникает предварительно определенное расхождение, блок 27 корректировки характеристики вождения корректирует результаты изучения Y1 и Y2, чтобы сделать их ближе к характеристике X вождения области. В частности, корректировка выполняется так, что вершина y1, указывающая среднее значение результата изучения Y1, находится в приемлемом диапазоне A. В то же время, также для результата изучения Y2, корректировка выполняется так, что вершина y2, указывающая на среднее значение результата изучения Y2, находится в приемлемом диапазоне A. В этом процессе можно выполнить корректировку так, чтобы вершины y1 и y2 результатов изучения Y1 и Y2 совпадали с вершиной x, указывающей среднее значение характеристики Х вождения области. В этом случае результаты изучения Y1 и Y2 совпадают с характеристикой X вождения области, и управление автоматизированным вождением выполняется с характеристикой X вождения области.
[0054]
На фиг.10 показан пример случая, когда параметром является скорость, а результат изучения Y1 показывает, что водитель имеет тенденцию слишком быстро двигаться со скоростью намного большей, чем характеристика X вождения области. Если управление автоматизированным вождением выполняется с результатом изучения Y1 без корректировки результата изучения Y1, окружающие транспортные средства, движущиеся в этой области, могут чувствовать, что за ними следуют вплотную, и они чувствуют себя некомфортно и неуверенно. Однако в этом варианте осуществления результат изучения Y1 корректируется так, чтобы он был ближе к характеристике X вождения области; таким образом, можно предотвратить ощущение дискомфорта и незащищенности окружающих транспортных средств, выполняя управление автоматизированным вождением на основе скорректированного результата изучения.
[0055]
С другой стороны, результат изучения Y2 показывает, что водитель имеет тенденцию слишком медленно двигаться со скоростью намного меньшей, чем характеристика X вождения области. Если управление автоматизированным вождением выполняется с результатом изучения Y2 без корректировки результата изучения Y2, это может препятствовать движению и создавать проблемы для окружающих транспортных средств. Кроме того, пользователи могут чувствовать себя некомфортно и неуверенно из–за гудков, издаваемых окружающими транспортными средствами. Однако в этом варианте осуществления результат изучения Y2 корректируется так, чтобы он был ближе к характеристике X вождения области; таким образом, можно предотвратить беспокойство окружающих транспортных средств и неприятные и неуверенные ощущения пользователя, выполняя управление автоматизированным вождением на основе скорректированного результата изучения.
[0056]
Приемлемый диапазон A всегда может использовать постоянные значения; однако приемлемый диапазон A также может быть установлен на основе характеристик поведения водителей в этой области. Например, приемлемый диапазон устанавливается на основе степени изменения поведения водителей в этой области. Когда изменение поведения водителей в этой области невелико, приемлемый диапазон может быть сужен до диапазона от –1σ до +1σ, а когда изменение велико, приемлемый диапазон может быть расширен до диапазона между –2σ и +2σ. Например, в случае, когда параметром является скорость, приемлемый диапазон A расширяется, если существует множество водителей, таких как быстрые водители и медленные водители, и приемлемый диапазон A сужается, если почти все водители едут со схожей скоростью.
[0057]
Приемлемый диапазон A может изменяться в зависимости от окружающей обстановки. Например, когда транспортное средство с автоматизированным вождением движется по шоссе, окружающие транспортные средства движутся со скоростью около 100 км/ч, и разница незначительна; таким образом, приемлемый диапазон A может быть сужен. С другой стороны, в случае движения по обычной дороге колебания скоростей окружающих транспортных средств велики; таким образом, предпочтительно расширить приемлемый диапазон А.
[0058]
Как описано выше, блок 27 корректировки характеристики вождения корректирует результат изучения обработки изучения характеристики вождения в соответствии с характеристиками вождения области. Результаты изучения Y1 и Y2, показанные на фиг.10, соответственно представляют результаты изучения, рассчитанные для коэффициентов a0–a6, b0 и b1 в выражении (1) и коэффициентов c0–c6 и d в выражении (2), рассчитанных посредством обработки изучения характеристики вождения. Таким образом, эти коэффициенты соответственно корректируются так, чтобы они были ближе к характеристикам вождения в этом районе.
[0059]
Однако, когда нет окружающих транспортных средств, корректировка в соответствии с характеристиками вождения области не требуется; таким образом, результат изучения обработки изучения характеристики вождения может быть непосредственно применен к характеристикам вождения при управлении автоматизированным вождением без использования скорректированного результата изучения.
[0060]
На этапе S209 блок 29 выполнения управления автоматизированным вождением выполняет управление автоматизированным вождением на основе скорректированного таким образом результата изучения. В частности, блок 29 выполнения управления автоматизированным вождением передает инструкцию выполнения управления на исполнительный механизм 11 и выполняет операции акселератора, тормоза, рулевого управления и т.п., требуемые для автоматизированного вождения.
[0061]
На этапе S211 блок 29 выполнения управления автоматизированным вождением определяет, завершено ли автоматизированное вождение, и когда автоматизированное вождение не завершено, процесс возвращается к этапу S205, и управление автоматизированным вождением продолжается. С другой стороны, когда автоматизированное вождение переключается на ручное вождение, и автоматизированное вождение завершается, обработка управления автоматизированным вождением в соответствии с этим вариантом осуществления завершается.
[0062]
Далее описывается случай, когда предварительно определенное расхождение не возникает на этапе S203. На этапе S213 блок 29 выполнения управления автоматизированным вождением обнаруживает данные движения о состоянии движения транспортного средства и информацию среды о среде движения вокруг транспортного средства из блока 3 обнаружения состояния движения и блока 5 обнаружения среды движения.
[0063]
На этапе S215 блок 29 выполнения управления автоматизированным вождением устанавливает характеристики вождения на основе результата изучения обработки изучения характеристики вождения. В частности, коэффициенты a0–a6, b0 и b1 выражения (1) и коэффициенты c0–c6 и d выражения (2) в качестве результата изучения устанавливаются в выражения (1) – (4) и вычисляются характеристики вождения, такие как расстояние Df между транспортными средствами и тормозной путь Db. Блок 29 выполнения управления автоматизированным вождением затем устанавливает вычисленные характеристики вождения в качестве характеристик вождения при управлении автоматизированным вождением.
[0064]
На этапе S217 блок 29 выполнения управления автоматизированным вождением выполняет управление автоматизированным вождением, используя установленные таким образом характеристики вождения. В частности, блок 29 выполнения управления автоматизированным вождением передает инструкцию выполнения управления на исполнительный механизм 11 и выполняет операции акселератора, тормоза, рулевого управления и т.п., требуемые для автоматизированного вождения.
[0065]
На этапе S219 блок 29 выполнения управления автоматизированным вождением определяет, завершено ли автоматизированное вождение, и когда автоматизированное вождение не завершено, процесс возвращается к этапу S213, и управление автоматизированным вождением продолжается. С другой стороны, когда автоматизированное вождение переключается на ручное вождение, и автоматизированное вождение завершается, обработка управления автоматизированным вождением в соответствии с этим вариантом осуществления завершается.
[0066]
[Эффекты варианта осуществления]
Как подробно описано, способ помощи при вождении согласно этому варианту осуществления включает в себя обнаружение характеристики вождения области, в которой движется транспортное средство с автоматизированным вождением, и корректировку результата изучения в соответствии с обнаруженной характеристикой вождения области и выполнение управления автоматизированным вождением на основе скорректированного результата изучения. Следовательно, транспортное средство с автоматизированным вождением не ведет себя иначе, чем окружающие транспортные средства, даже когда результат изучения отличается от характеристики вождения области, и это может предотвратить ощущение незащищенности пользователя. Кроме того, поскольку поведение транспортного средства с автоматизированным вождением, отличное от окружающих транспортных средств, может быть подавлено, можно предотвратить возникновение незащищенного ощущения для окружающих транспортных средств.
[0067]
В способе помощи при вождении согласно этому варианту осуществления, когда возникает предварительно определенное расхождение между характеристикой вождения области и результатом изучения, результат изучения корректируется так, чтобы он был ближе к характеристике вождения области. Следовательно, даже когда есть расхождение между результатом изучения и характеристикой вождения области, можно приблизить результат изучения к характеристике вождения области. Это позволяет двигаться в соответствии с уникальным способом передвижения в области даже в сцене, где пользователь транспортного средства, вероятно, будет чувствовать себя неуверенно в отношении способа движения в области движения, и, таким образом, можно подавить неуверенное чувство пользователя и обеспечение неуверенного чувства для окружающих транспортных средств в надлежащее время.
[0068]
Кроме того, в способе помощи при вождении согласно этому варианту осуществления приемлемый диапазон задается для характеристики вождения области, причем приемлемый диапазон устанавливается на основе характеристики поведения вождения водителей в этой области. Следовательно, результат изучения может быть скорректирован в соответствии с характеристикой поведения водителей в области, и, таким образом, можно корректно корректировать результат изучения.
[0069]
В способе помощи при вождении согласно этому варианту осуществления приемлемый диапазон может изменяться в зависимости от окружающей обстановки транспортного средства с автоматизированным вождением. Следовательно, результат изучения можно гибко корректировать в соответствии с окружающей обстановкой, и, таким образом, можно корректно корректировать результат изучения.
[0070]
Кроме того, в способе помощи при вождении согласно этому варианту осуществления, характеристикой вождения, которая должна быть изучена, является по меньшей мере одно из расстояния между транспортными средствами, момента торможения, скорости, ускорения и временного интервала. Следовательно, можно корректировать результат изучения в соответствии с каждым параметром.
[0071]
В способе помощи при вождении согласно этому варианту осуществления область делится на административные единицы. Следовательно, поскольку области четко разделены, пользователь при переходе в другую зону может уверенно распознать изменение области.
[0072]
Кроме того, в способе помощи при вождении согласно этому варианту осуществления область делится на регионы, имеющие сходную характеристику вождения. Следовательно, поскольку характеристики вождения схожи в данной области, можно выполнить управление автоматизированным вождением, соответствующее способу движения в области, более надежно, корректируя результат изучения каждой области.
[0073]
В способе помощи при вождении в соответствии с этим вариантом осуществления характеристика вождения области сохраняется в транспортном средстве с автоматизированным вождением заранее. Следовательно, можно быстро корректировать характеристику вождения в момент времени, когда область движения изменяется, или момент времени, когда возникает предварительно определенное расхождение.
[0074]
Кроме того, в способе помощи при вождении согласно этому варианту осуществления характеристика вождения области вычисляется внешним сервером. Следовательно, можно уменьшить нагрузку по обработке в транспортном средстве с автоматизированным вождением, а также можно снизить стоимость, выполняя обработку внешним сервером сразу.
[0075]
В способе помощи при вождении согласно этому варианту осуществления транспортное средство с автоматизированным вождением получает характеристику вождения области от внешнего сервера через блок связи. Следовательно, можно уменьшить нагрузку по обработке в транспортном средстве с автоматизированным вождением, а также можно уменьшить емкость для сохранения характеристик вождения области.
[0076]
Вышеописанный вариант осуществления является примером настоящего изобретения. Следовательно, настоящее изобретение не ограничено вышеописанным вариантом осуществления, и нет необходимости говорить, что даже для режима, отличного от вышеупомянутого варианта осуществления, различные изменения в зависимости от конструкций и т.п. могут быть сделаны без отклонения от технической идеи согласно настоящему изобретению.
СПИСОК ССЫЛОЧНЫХ ОБОЗНАЧЕНИЙ
[0077]
1 устройство помощи при вождении
3 блок обнаружения состояния движения
5 блок обнаружения среды движения
7 переключатель переключения вождения
9 блок индикации состояния управления
11 исполнительный механизм
13 сервер управления
21 блок хранения данных для изучения
23 блок изучения характеристики вождения
25 блок определения области
27 блок регулировки характеристики вождения
29 блок выполнения управления автоматизированным вождением
31 блок сбора данных
33 блок вычисления характеристики вождения области
35 база данных
100 система помощи при вождении.




Изобретение относится к способу и устройству помощи при вождении. Способ помощи при вождении для транспортного средства с автоматизированным вождением. Транспортное средство способно переключаться между ручным вождением водителем и автоматизированным вождением, изучает характеристику вождения водителя во время ручного вождения и отражает результат изучения на характеристику вождения под управлением автоматизированного вождения. Способ содержит этапы, на которых обнаруживают характеристику вождения области, в которой движется транспортное средство с автоматизированным вождением и корректируют результат изучения в соответствии с обнаруженной характеристикой вождения области и выполняют управление автоматизированного вождения на основе скорректированного результата изучения. Достигается повышение безопасности управления транспортным средством. 2 н. и 9 з.п. ф-лы. 10 ил.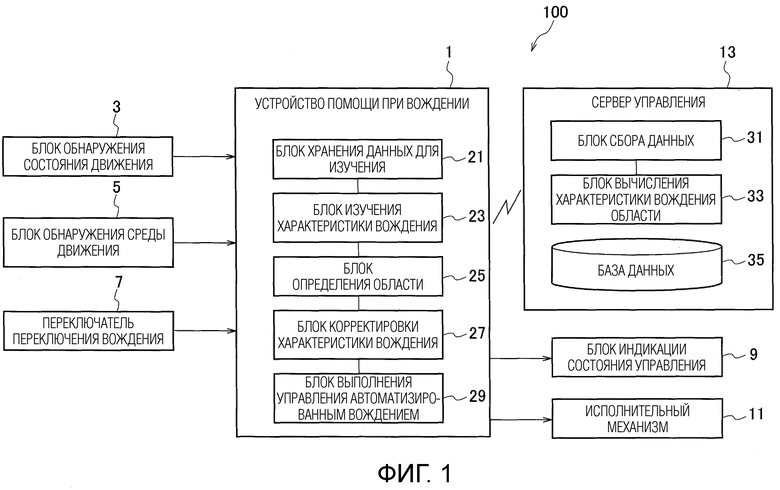
1. Способ помощи при вождении для транспортного средства с автоматизированным вождением, которое способно переключаться между ручным вождением водителем и автоматизированным вождением, изучает характеристику вождения водителя во время ручного вождения и отражает результат изучения на характеристику вождения под управлением автоматизированного вождения, включающий в себя этапы, на которых:
обнаруживают характеристику вождения области, в которой движется транспортное средство с автоматизированным вождением; и
корректируют результат изучения в соответствии с обнаруженной характеристикой вождения области и выполняют управление автоматизированного вождения на основе скорректированного результата изучения.
2. Способ помощи при вождении по п.1, в котором
когда между характеристикой вождения области и результатом изучения возникает предварительно определенное расхождение, результат изучения корректируется так, чтобы он был ближе к характеристике вождения области.
3. Способ помощи при вождении по п.1 или 2, в котором
приемлемый диапазон устанавливается для характеристики вождения области, причем приемлемый диапазон устанавливается на основе характеристики поведения вождения водителей в области.
4. Способ помощи при вождении по п.3, в котором
приемлемый диапазон может изменяться в зависимости от окружающей обстановки транспортного средства с автоматизированным вождением.
5. Способ помощи при вождении по п.1 или 2, в котором
характеристика вождения, которая должна быть изучена, представляет собой по меньшей мере одно из расстояния между транспортными средствами, времени торможения, скорости, ускорения и временного интервала.
6. Способ помощи при вождении по п.1 или 2, в котором
область делится на административные единицы.
7. Способ помощи при вождении по п.1 или 2, в котором
область делится на регионы, имеющие сходную характеристику вождения.
8. Способ помощи при вождении по п.1 или 2, в котором
характеристика вождения области заранее сохраняется в транспортном средстве с автоматизированным вождением.
9. Способ помощи при вождении по п.1 или 2, в котором
характеристика вождения области вычисляется внешним сервером.
10. Способ помощи при вождении по п.9, в котором
транспортное средство с автоматизированным вождением получает характеристику вождения области от внешнего сервера через блок связи.
11. Устройство помощи при вождении для транспортного средства с автоматизированным вождением, которое способно переключаться между ручным вождением водителем и управлением автоматизированного вождения, изучает характеристику вождения водителя во время ручного вождения и отражает результат изучения на характеристику вождения под управлением автоматизированного вождения, при этом
устройство помощи при вождении обнаруживает характеристику вождения области, в которой движется транспортное средство с автоматизированным вождением, корректирует результат изучения в соответствии с обнаруженной характеристикой вождения области и выполняет управление автоматизированного вождения на основе скорректированного результата изучения.
| Многоступенчатая активно-реактивная турбина | 1924 |
|
SU2013A1 |
| US 5521823 A, 28.05.1996 | |||
| АВТОМОБИЛЬНАЯ СИСТЕМА РЕКОМЕНДАЦИЙ ДЛЯ ВОДИТЕЛЯ | 2012 |
|
RU2599593C2 |

