ОБЛАСТЬ ТЕХНИКИ
[0001]
Настоящее изобретение относится к способу управления движением и устройству управления движением для транспортного средства.
Уровень техники
[0002]
Известно, что в качестве устройства, используемого для автономного управления движением транспортного средства или тому подобного, устройство генерации маршрута движения генерирует маршрут движения транспортного средства с использованием машины опорных векторов. Устройство генерации маршрута движения получает информацию об окружении рассматриваемого транспортного средства и состояние движения рассматриваемого транспортного средства и распознает пригодную для движения область и непригодную для движения область рассматриваемого транспортного средства по ширине дороги, форме дороги и препятствиям, полученным на основе информации об окружении. Затем в распознанной пригодной для движения области устройство генерации маршрута движения устанавливает кривизну маршрута движения на основе скорости транспортного средства рассматриваемого транспортного средства и целевого поперечного ускорения рассматриваемого транспортного средства. Исходя из этой кривизны, коэффициент радиальной базисной функции, используемой в качестве функции ядра на машине опорных векторов, устанавливается как параметр кривизны. Затем машина опорных векторов устройства генерации маршрута движения генерирует маршрут движения рассматриваемого транспортного средства на основе установленного параметра кривизны (Патентный документ 1).
[Документ предшествующего уровня техники]
[Патентный Документ]
[0003]
[[Патентный Документ 1] JP2015-16799 A
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Задачи, решаемые изобретением
[0004]
В предыдущем уровне техники машина опорных векторов устройства генерации маршрута движения устанавливает характерную точку, ближайшую к плоскости идентификации, среди характерных точек, принадлежащих левой и правой частям дороги, в качестве опорного вектора. Плоскость идентификации генерируется так, чтобы расстояние между опорным вектором и плоскостью идентификации было максимальным, и это устанавливается как маршрут движения. Другими словами, маршрут движения представляет собой приблизительно центр правого и левого направлений по ширине области дороги, распознанной в качестве пригодной для движения области. Таким образом, например, если есть препятствия только с левой стороны относительно широкой дороги, такие как припаркованные транспортные средства, размещенные по левой стороне дороги, маршрут движения генерируется так, чтобы проходить через центр дороги только в том пространстве, в котором нет никаких препятствий. Поэтому генерируется волнистый маршрут движения, который может причинить дискомфорт пассажирам.
[0005]
Задача, которая должна быть решена с помощью настоящего изобретения, состоит в том, чтобы предоставить способ управления движением и устройство управления движением для транспортного средства, способного реализовать плавное автономное управление движением за счет устранения дискомфорта пассажиров.
Средства для решения задач
[0006]
Настоящее изобретение решает указанную выше задачу путем обнаружения пригодной для движения области дороги в области дороги, в которой может двигаться рассматриваемое транспортное средство; генерации поля потенциалов в пространстве пригодной для движения области дороги, в которой значение потенциала левосторонней граничной линии и значение потенциала правосторонней граничной линии устанавливаются на отличающиеся друг от друга значения; вычисления ширины пригодной для движения области дороги с применением метода потенциалов; сравнения поперечного положения маршрута движения, установленного на основе значения потенциала в поле потенциалов, с поперечным положением маршрута движения, установленным заранее в пригодной для движения области дороги на основе левосторонней граничной линии или правосторонней граничной линии; корректировки значения потенциала, если есть разность между двумя вышеуказанными поперечными положениями; повторной генерации поля потенциалов, установленного на скорректированное значение потенциала; генерации маршрута движения посредством скорректированного значения потенциала; и выполнения автономного управления движением рассматриваемого транспортного средства согласно сгенерированному маршруту движения.
Эффект изобретения
[0007]
В соответствии с настоящим изобретением, поскольку маршрут движения генерируется в соответствии с поперечным положением маршрута движения, заданным заранее, возможно реализовать плавное автономное управление движением за счет устранения дискомфорта пассажиров.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0008]
Фиг. 1 является блок-схемой, иллюстрирующей вариант осуществления устройства управления движением для транспортного средства согласно настоящему изобретению.
Фиг. 2 является блок-схемой, иллюстрирующей конфигурацию блока вычисления ширины пригодной для движения области дороги, показанного на фиг. 1.
Фиг. 3 является блок-схемой, иллюстрирующей конфигурацию блока вычисления маршрута движения, показанного на фиг. 1.
Фиг. 4 является блок-схемой последовательности операций, иллюстрирующей процедуру обработки, выполняемую устройством управления движением для транспортного средства, показанным на фиг. 1.
Фиг. 5 является видом сверху пригодной для движения области дороги для объяснения процессов на этапах S1-S4, показанных на фиг. 4.
Фиг. 6 является схемой, иллюстрирующей поле потенциалов и эквипотенциальные линии для объяснения процессов на этапах S5-S6, показанных на фиг. 4.
Фиг. 7 является графиком, иллюстрирующим значение потенциала в сечении по линии VII-VII, показанной на фиг. 6 для объяснения процесса на этапе S7, показанном на фиг. 4.
Фиг. 8 является графиком, иллюстрирующим значение потенциала в сечении по линии VII-VII, показанной на фиг. 6 для объяснения процессов на этапах S8-S10, показанных на фиг. 4.
Фиг. 9 является графиком, иллюстрирующим значение потенциала в сечении по линии VII-VII, показанной на фиг. 6 для объяснения другого примера процессов на этапах S8-S10, показанных на фиг. 4.
Фиг. 10 является схемой, иллюстрирующей пример карты управления, хранящейся в блоке указания поперечного положения, показанном на фиг. 1.
Фиг. 11 является схемой, иллюстрирующей поле потенциалов и эквипотенциальные линии для объяснения процесса на этапе S12, показанном на фиг. 4.
Фиг. 12 является схемой, иллюстрирующей поле потенциалов и эквипотенциальные линии для объяснения процесса на этапе S13, показанном на фиг. 4.
Фиг. 13 является видом сверху, иллюстрирующим пример сцены предварительного условия маршрута движения, сгенерированного с использованием устройства управления движением для транспортного средства согласно настоящему изобретению.
Фиг. 14 является видом сверху (часть 1) для объяснения процесса, выполняемого с использованием устройства управления движением для транспортного средства согласно настоящему изобретению в отношении сцены на фиг. 13.
Фиг. 15 является видом сверху (часть 2) для объяснения процесса, выполняемого с использованием устройства управления движением для транспортного средства согласно настоящему изобретению в отношении сцены на фиг. 13.
Фиг. 16 является видом сверху (часть 3) для объяснения процесса, выполняемого с использованием устройства управления движением для транспортного средства согласно настоящему изобретению в отношении сцены на фиг. 13.
ВАРИАНТЫ(Ы) ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
[0009]
Фиг. 1 является блок-схемой, иллюстрирующей конфигурацию устройства управления движением VTC (контроллера движения транспортного средства) для транспортного средства согласно настоящему варианту осуществления. Устройство VTC управления движением для транспортного средства согласно настоящему варианту осуществления также является вариантом осуществления для выполнения способа управления движением для транспортного средства согласно настоящему изобретению. Как показано на фиг. 1, устройство VTC управления движением для транспортного средства согласно настоящему варианту осуществления содержит блоки 1-5 получения границ пригодной для движения области дороги, блок 6 комбинирования границ пригодной для движения области дороги, блок 7 распознавания дорожной среды, блок 8 указания поперечного положения, блок 9 установки граничных условий, блок 10 вычисления ширины пригодной для движения области дороги, блок 11 вычисления маршрута движения и блок 12 управления отслеживанием маршрута движения.
[0010]
Блоки 1-5 получения границ пригодной для движения области дороги из этих блоков состоят из датчиков различных типов, как будет описано ниже. Блок 6 комбинирования границ пригодной для движения области дороги, блок 7 распознавания дорожной среды, блок 8 указания поперечного положения, блок 9 установки граничных условий, блок 10 вычисления ширины пригодной для движения области дороги, блок 11 вычисления маршрута движения и блок 12 управления отслеживанием маршрута движения конфигурируются одним или более компьютерами и программным обеспечением, установленным на компьютере. Компьютер содержит ПЗУ, в котором хранятся программы для функционирования соответствующих блоков, таких как блок 6 комбинирования границ пригодной для движения области дороги, блок 7 распознавания дорожной среды, блок 8 указания поперечного положения, блок 9 установки граничных условий, блок 10 вычисления ширины пригодной для движения области дороги, блок 11 вычисления маршрута движения и блок 12 управления отслеживанием маршрута движения, ЦП, выполняющий программы, хранящиеся в ПЗУ, и ОЗУ, функционирующее как запоминающее устройство с выборкой. Кроме того, в качестве рабочих схем вместо ЦП или вместе с ним могут использоваться MPU, DSP, ASIC, FPGA и т.п.
[0011]
Блоки 1-5 получения границ пригодной для движения области дороги обнаруживают различные типы информации для получения информации о левосторонней границе пригодной для движения области дороги, относящейся к левосторонней граничной линии, и информации о правосторонней границе пригодной для движения области дороги, относящейся к правосторонней граничной линии пригодной для движения области TA дороги рассматриваемого транспортного средства V, которое должно управляться посредством автономного управления движением.
[0012]
Блок 1 получения границ пригодной для движения области дороги получает информацию о местоположении рассматриваемого транспортного средства с помощью устройства определения местоположения рассматриваемого транспортного средства, установленного на рассматриваемом транспортном средстве, и информацию трехмерной карты высокого разрешения, хранящуюся в базе картографических данных, и выводит эти фрагменты информации в блок 6 комбинирования границ пригодной для движения области дороги и блок 7 распознавания дорожной среды. Это устройство определения местоположения рассматриваемого транспортного средства состоит из блока GPS, гироскопического датчика, датчика скорости транспортного средства и т.д. и обнаруживает радиоволны, передаваемые через передачи нескольких спутников, блоком GPS, периодически получает информацию о местоположении рассматриваемого транспортного средства и определяет информацию о текущем местоположении рассматриваемого транспортного средства на основе полученной информации о местоположении рассматриваемого транспортного средства, информации об изменении угла, полученной от гироскопического датчика, и скорости транспортного средства, полученной от датчика скорости транспортного средства. Информация трехмерной карты высокого разрешения, хранящаяся в базе картографических данных, представляет собой информацию трехмерной карты, основанную на форме дороги, обнаруженной, когда транспортное средство для получения данных используется для движения по реальной дороге. Кроме того, информация трехмерной карты высокого разрешения является картографической информацией, в которой, вместе с картографической информацией, подробная и с высоким разрешением информация о местоположении, такая как точки слияния дорог, точки разветвления, пункты оплаты проезда, местоположения, в которых количество полос движения уменьшается, зона обслуживания (SA)/зона парковки (PA) и т.д. связаны в качестве трехмерной информации.
[0013]
Блок 2 получения границ пригодной для движения области дороги получает информацию о препятствиях (информацию LRF) с помощью лазерного дальномера (LRF), установленного в передней части транспортного средства, и выводит информацию о препятствиях в блок 6 комбинирования границ пригодной для движения области дороги и блок 7 распознавания дорожной среды. Лазерный дальномер излучает лазерный луч, который представляет собой выходную волну для измерения расстояния впереди транспортного средства, и обнаруживает отраженную волну (волну обнаружения), чтобы генерировать сигнал измерения расстояния, указывающий относительное положение между обнаруженным объектом около транспортного средства и транспортным средством. Обнаруженными объектами являются, например, другие транспортные средства на проезжей дороге, по которой движется транспортное средство, двухколесные транспортные средства, велосипеды, пешеходы, разделительные линии на поверхности проезжей дороги, бордюры на краях дороги, ограждения, стены, насыпи и тому подобное.
[0014]
Блок 3 получения границ пригодной для движения области дороги получает информацию о препятствиях (радиолокационную информацию) с помощью радиолокационного устройства, используя миллиметровые волны или ультразвуковые волны, и выводит информацию о препятствиях в блок 6 комбинирования границ пригодной для движения области дороги. Радиолокационное устройство сканирует заданную область вокруг рассматриваемого транспортного средства, излучая миллиметровые волны или ультразвуковые волны впереди транспортного средства, и обнаруживает препятствия, такие как другие транспортные средства, двухколесные транспортные средства, велосипеды, пешеходы, бордюры на краях дороги, ограждения, стены, насыпи и т.д., существующие около рассматриваемого транспортного средства. Например, радиолокационное устройство определяет относительное положение (направление) между препятствиями и рассматриваемым транспортным средством, относительную скорость препятствий и расстояние от рассматриваемого транспортного средства до препятствий или тому подобное в качестве окружающих ситуаций рассматриваемого транспортного средства.
[0015]
Блок 4 получения границ пригодной для движения области дороги получает информацию о препятствиях (информацию камеры) с помощью камеры, установленной в передней части транспортного средства или т.п., и выводит информацию о препятствиях в блок 6 комбинирования границ пригодной для движения области дороги. Камера представляет собой датчик изображения для получения данных изображения путем формирования изображения заранее определенной области перед рассматриваемым транспортным средством, например, широкоугольную камеру на основе прибора с зарядовой связью (CCD), обеспеченную в верхней части переднего лобового стекла в салоне транспортного средства. Камера может быть стереокамерой или всенаправленной камерой и может включать в себя множество датчиков изображения. Из полученных данных изображения камера обнаруживает дорогу, существующую впереди рассматриваемого транспортного средства, и конструкции вокруг дороги, дорожные знаки, знаки, другие транспортные средства, двухколесные транспортные средства, велосипеды, пешеходов и т.п. в качестве окружающих ситуаций рассматриваемого транспортного средства.
[0016]
Блок 5 получения границ пригодной для движения области дороги получает информацию о препятствиях (информацию системы кругового обзора AVM) от камер, расположенных вокруг передней, задней и боковой части транспортного средства, и выводит информацию о препятствиях в блок 6 комбинирования границ пригодной для движения области дороги. Каждая камера представляет собой датчик изображения для получения данных изображения путем формирования изображения области всей периферии рассматриваемого транспортного средства, например, широкоугольную камеру на основе прибора с зарядовой связью (CCD), расположенную в верхней части переднего лобового стекла в салоне транспортного средства, в левом и правом боковых зеркалах, крышке багажника и т.п. Из полученных данных изображения камера обнаруживает дорогу, существующую вокруг рассматриваемого транспортного средства, и конструкции вокруг дороги, дорожные знаки, знаки, другие транспортные средства, двухколесные транспортные средства, велосипеды, пешеходов и т.п. в качестве окружающих ситуаций рассматриваемого транспортного средства.
[0017]
Нет необходимости обеспечивать все вышеупомянутые блоки 1-5 получения границ пригодной для движения области дороги, но могут быть обеспечены по меньшей мере блок 1 получения границ пригодной для движения области дороги и один из блока 2 получения границ пригодной для движения области дороги и блока 3 получения границ пригодной для движения области дороги и один из блока 4 получения границ пригодной для движения области дороги и блока 5 получения границ пригодной для движения области дороги. Поскольку блок 1 получения границ пригодной для движения области дороги получает информацию о текущем местоположении рассматриваемого транспортного средства и информацию трехмерной карты высокого разрешения в его окрестностях, возможно распознавать формы дороги, отличные от препятствий в окрестностях рассматриваемого транспортного средства. Кроме того, блок 2 получения границ пригодной для движения области дороги или блок 3 получения границ пригодной для движения области дороги может распознавать наличие или отсутствие относительно удаленных препятствий, поскольку он сканирует с использованием лазерного луча или тому подобного. В отличие от этого, блок 4 получения границ пригодной для движения области дороги или блок 5 получения границ пригодной для движения области дороги может распознавать не только наличие или отсутствие препятствий, но также их типы, поскольку он формирует изображения, используя датчик изображения или тому подобное.
[0018]
Блок 6 комбинирования границ пригодной для движения области дороги генерирует информацию о левосторонней границе пригодной для движения области дороги, относящуюся к левосторонней граничной линии пригодной для движения области дороги, в которой может двигаться рассматриваемое транспортное средство, и информацию о правосторонней границе пригодной для движения области дороги, относящуюся к правосторонней граничной линии пригодной для движения области дороги, на основе информации, полученной блоками 1-5 получения границ пригодной для движения области дороги. То есть, блок 6 комбинирования границ пригодной для движения области дороги обнаруживает информацию о первой границе пригодной для движения области дороги в горизонтальной плоскости области дороги, в которой может двигаться рассматриваемое транспортное средство. Информация о первой границе пригодной для движения области дороги обнаруживается на основе информации о текущем местоположении рассматриваемого транспортного средства, полученной блоком 1 получения границ пригодной для движения области дороги, и картографической информации, в которой задана информация о границах дороги. В то же время блок 6 комбинирования границ пригодной для движения области дороги получает объекты вокруг рассматриваемого транспортного средства и дорожные ситуации, полученные блоками 2-5 получения границ пригодной для движения области дороги, в качестве информации об окружении. Затем блок 6 комбинирования границ пригодной для движения области дороги обнаруживает информацию о второй границе пригодной для движения области дороги в горизонтальной плоскости области дороги, в которой может двигаться рассматриваемое транспортное средство, на основе информации об окружении.
[0019]
В данном случае, в настоящем описании термин «дорога» означает саму дорогу, которая фактически существует независимо от наличия или отсутствия препятствий и которая приспособлена для проезда транспортных средств или прохода людей и которая включена в картографическую информацию. С другой стороны, в настоящем описании термин «пригодная для движения область дороги» означает область дороги, в которой может двигаться рассматриваемое транспортное средство, то есть, пригодную для движения область дороги, в которой может двигаться рассматриваемое транспортное средство, исключая препятствия. Таким образом, блок 6 комбинирования границ пригодной для движения области дороги обнаруживает информацию о первой границе пригодной для движения области дороги, касающуюся «дороги», полученную блоком 1 получения границ пригодной для движения области дороги, при этом он обнаруживает информацию о второй границе пригодной для движения области дороги, относящуюся к «пригодной для движения области дороги», полученной блоками 2-5 получения границ пригодной для движения области дороги. Затем блок 6 комбинирования границ пригодной для движения области дороги комбинирует или интегрирует информацию о первой границе пригодной для движения области дороги и информацию о второй границе пригодной для движения области дороги для генерирования информации о комбинированных границах пригодной для движения области дороги и дополнительно делит информацию о комбинированных границах пригодной для движения области дороги на информацию о левосторонней границе пригодной для движения области дороги и информацию о правосторонней границе пригодной для движения области дороги. Кроме того, в этом описании термины «левая сторона», «правая сторона» и «поперечное направление» означают левую сторону, правую сторону и поперечное направление, когда направление движения рассматриваемого транспортного средства является направлением вперед.
[0020]
Фиг. 13 является видом сверху, иллюстрирующим пример дороги, по которой движется рассматриваемое транспортное средство V. Фиг. 13 иллюстрирует одну полосу движения слева в стране с законодательством о дорожном движении и правилами движения для левостороннего движения, например, Японии или Великобритании. В этом случае блок 6 комбинирования границ пригодной для движения области дороги получает текущее местоположение рассматриваемого транспортного средства V, в частности информацию о широте/долготе, от блока GPS посредством блока 1 получения границ пригодной для движения области дороги. Кроме того, блок 6 комбинирования границ пригодной для движения области дороги получает дорожную информацию об окружении, в которой существует рассматриваемое транспортное средство V, из информации трехмерной карты высокого разрешения, в частности, окружающую среду или атрибут дороги R (национальную информацию, информацию о местоположении левого края RL дороги, информацию о местоположении правого края RR дороги, ширину дороги R, тип - шоссе/дорога общего назначения и т.д.). В то же время блок 6 комбинирования границ пригодной для движения области дороги получает местоположение препятствий, таких как другие транспортные средства, двухколесные транспортные средства, велосипеды, пешеходы, бордюры на краях дороги, ограждения, стены, насыпи и т.д., которые существуют вокруг рассматриваемого транспортного средства V, посредством блоков 2-5 получения границ пригодной для движения области дороги.
[0021]
Затем блок 6 комбинирования границ пригодной для движения области дороги вычитает область присутствия препятствий, распознанных из информации о местоположении препятствий, полученной блоками 2-5 получения границ пригодной для движения области дороги, из области дороги R, распознанной из информации о текущем местоположении рассматриваемого транспортного средства V, полученной блоком 1 получения границ пригодной для движения области дороги, и информации трехмерной карты высокого разрешения о его окружении, и вычисляет пригодную для движения область TA дороги, в которой может двигаться рассматриваемое транспортное средство V. Затем блок 6 комбинирования границ пригодной для движения области дороги вычисляет информацию о левосторонней границе пригодной для движения области дороги, указывающую левостороннюю граничную линию EL, и информацию о правосторонней границе пригодной для движения области дороги, указывающую правостороннюю граничную линию ER, на основе информации области для пригодной для движения области TA дороги, рассчитанной таким образом. Что касается сцены, проиллюстрированной на фиг. 13, поскольку блоки 2-5 получения границ пригодной для движения области дороги получают наличие трех неподвижных препятствий (припаркованных транспортных средств) V1, V2 и V3 на левой стороне дороги R, левосторонняя граничная линия EL является линией, показанной пунктирной линией. С другой стороны, поскольку на правой стороне дороги R нет препятствий, правосторонняя граничная линия ER совпадает с линией правого края RR дороги. Блок 6 комбинирования границ пригодной для движения области дороги преобразует каждую из информации о левосторонней границе пригодной для движения области дороги, относящейся к левосторонней граничной линии EL, и информации о правосторонней границе пригодной для движения области дороги, относящейся к правосторонней граничной линии ER, в набор информации о последовательных прямых линиях и сохраняет набор информации о последовательных прямых линиях. Поэтому, даже для относительно простых форм дороги, показанных на фиг. 13, даже сложные формы дороги, показанные на фиг. 5, преобразуются в набор информации о последовательных прямых линиях и сохраняются, как показано на фиг. 5.
[0022]
Обращаясь снова к фиг. 1, блок 7 распознавания дорожной среды распознает дорожную среду или тому подобное, в которой рассматриваемое транспортное средство V в настоящее время движется, на основе информации о текущем местоположении рассматриваемого транспортного средства V, полученной блоком 1 получения границ пригодной для движения области дороги, информации трехмерной карты высокого разрешения о его окружении и информации о местоположении препятствий, полученной блоком 2 получения границ пригодной для движения области дороги. В частности, как проиллюстрировано на фиг. 10, в качестве дорожной среды блок 7 распознавания дорожной среды распознает, есть ли множество припаркованных транспортных средств на левой или правой стороне дороги R. Блок 7 распознавания дорожной среды также распознает национальную информацию, такую как являются ли законодательство о дорожном движении и правила движения транспортных средств левосторонним движением или правосторонним движением. Кроме того, блок 7 распознавания дорожной среды распознает частоту информации о левосторонней границе пригодной для движения области дороги для левосторонней граничной линии EL и частоту информации о правосторонней границе пригодной для движения области дороги для правой граничной линии ER. Фиг. 10 является схемой, иллюстрирующей пример карты управления, хранящейся в блоке 8 указания поперечного положения, показанном на фиг. 1.
[0023]
Блок 8 указания поперечного положения представляет собой блок, в котором поперечные положения пригодной для движения области TA дороги, подходящие для движения рассматриваемого транспортного средства V, устанавливаются заранее в соответствии с дорожной средой. Например, в Японии ширина легкового транспортного средства равна 1,4-2,5 м, при этом ширина дороги R в одной полосе движения указана равной около 3,5 м. Однако в некоторых странах, в том числе в Японии, есть дороги шириной около 5-6 м, и парковка часто разрешается на боковой части дороги. Поэтому в блоке 8 указания поперечного положения настоящего варианта осуществления факт, что парковка не запрещена, определяется с помощью информации трехмерной карты высокого разрешения блока 1 получения границ пригодной для движения области дороги, и факт, существуют ли фактически или нет припаркованные транспортные средства, определяется посредством информации LRF блока 2 получения границ пригодной для движения области дороги. Таким образом, в качестве дорожной среды блок 8 указания поперечного положения распознает, существует ли или нет множество припаркованных транспортных средств на боковой части дороги. Кроме того, блок 8 указания поперечного положения получает национальную информацию во время движения рассматриваемого транспортного средства V с помощью информации трехмерной карты высокого разрешения блока 1 получения границ пригодной для движения области дороги и распознает, является ли это левосторонним движением или правосторонним движением. Кроме того, в качестве других условий, блок 8 указания поперечного положения получает частоту информации о левосторонней границе пригодной для движения области дороги для левосторонней граничной линии EL и частоту информации о правосторонней границе пригодной для движения области дороги для правосторонней граничной линии ER, которые получают блоком 6 комбинирования границ пригодной для движения области дороги, и распознает, какая из левосторонней граничной линии EL и правосторонней граничной линии ER имеет больше препятствий. В данном случае, частота информации о левосторонней границе пригодной для движения области дороги и частота информации о правосторонней границе пригодной для движения области дороги означает частоту зигзагообразных линий в поперечном направлении относительно направления движения по дороге R (вертикальное направление на фиг. 13) на левосторонней граничной линии EL, показанной на фиг. 13. Это означает частоту левосторонней граничной линии EL и частоту правосторонней граничной линии ER, когда поперечное изменение принимается за амплитуду, и является частотой поперечного изменения на единицу расстояния в направлении вдоль дороги R. Более высокая частота означает большее количество препятствий, тогда как более низкая частота означает меньшее количество препятствий.
[0024]
Затем блок 8 указания поперечного положения выводит команду на основе дорожной среды, национальной информации и других условий, распознанных блоком 7 распознавания дорожной среды, и карты управления, показанной на фиг. 10, хранящиеся в блоке 8 указания поперечного положения. Когда есть много припаркованных транспортных средств на боковой стороне дороги в качестве дорожной среды, и страна распознается как с левосторонним движением по национальной информации, блок 8 указания поперечного положения выводит команду для выполнения автономного управления движением при установке центра ширины рассматриваемого транспортного средства V в положение 1,5 м от правого края пригодной для движения области TA дороги в левом направлении. Когда есть много припаркованных транспортных средств на боковой стороне дороги в качестве дорожной среды, и страна распознается как с правосторонним движением по национальной информации, блок 8 указания поперечного положения выводит команду для выполнения автономного управления движением при установке центра ширины рассматриваемого транспортного средства V в положение 1,5 м от левого края пригодной для движения области TA дороги в правом направлении. Точно так же, когда есть много припаркованных транспортных средств на боковой части дороги в качестве дорожной среды, и национальная информация не может быть получена, блок 8 указания поперечного положения получает частоту информации о левосторонней границе пригодной для движения области дороги для левосторонней граничной линии EL и частоту информации о правосторонней границе пригодной для движения области дороги для правосторонней граничной линии ER, которые получают блоком 6 комбинирования границ пригодной для движения области дороги. Затем, когда частота информации о левосторонней границе пригодной для движения области дороги меньше, блок 8 указания поперечного положения выводит команду на выполнение автономного управления движением при установке центра ширины рассматриваемого транспортного средства V в положение 1,5 м от левого края пригодной для движения области TA дороги в правом направлении. Когда частота информации о правосторонней границе пригодной для движения области дороги меньше, блок 8 указания поперечного положения выводит команду на выполнение автономного управления движением при установке центра ширины рассматриваемого транспортного средства V в положение 1,5 м от правого края пригодной для движения области TA дороги в левом направлении. В этом случае, когда на боковой части дороги не много припаркованных транспортных средств в качестве дорожной среды, блок 8 указания поперечного положения выводит команду на выполнение автономного управления движением так, что центральное положение пригодной для движения области TA дороги совпадает с центром ширины рассматриваемого транспортного средства V.
[0025]
Обращаясь к фиг. 1, блок 10 вычисления ширины пригодной для движения области дороги получает информацию о комбинированных границах пригодной для движения области дороги, вычисленную блоком 6 комбинирования границ пригодной для движения области дороги (включая информацию о левосторонней границе пригодной для движения области дороги и информацию о правосторонней границе пригодной для движения области дороги), и вычисляет ширину W пригодной для движения области дороги для пригодной для движения области TA дороги впереди рассматриваемого транспортного средства V. Фиг. 2 является блок-схемой, иллюстрирующей конкретную конфигурацию блока 10 вычисления ширины пригодной для движения области дороги, показанного на фиг. 1. Фиг. 5 является видом сверху, иллюстрирующим информацию о комбинированных границах пригодной для движения области дороги (включая информацию о левосторонней границе пригодной для движения области дороги и информацию о правосторонней границе пригодной для движения области дороги), вычисленную блоком 6 комбинирования границ пригодной для движения области дороги.
[0026]
Блок 10 вычисления ширины пригодной для движения области дороги содержит блок 101 вычисления значения потенциала, блок 102 вычисления эквипотенциальной линии и блок 103 вычисления градиента (наклона), как проиллюстрировано на фиг. 2. Блок 10 вычисления ширины пригодной для движения области дороги считывает каждую из информации о левосторонней границе пригодной для движения области дороги, относящейся к левосторонней граничной линии EL, и информации о правосторонней границе пригодной для движения области дороги, относящейся к правосторонней граничной линии ER, вычисляет ширину W пригодной для движения области дороги через заранее определенные интервалы относительно направления движения рассматриваемого транспортного средства V и выводит ширину W пригодной для движения области дороги в блок 9 установки граничных условий.
[0027]
Фиг. 6 является схемой, иллюстрирующей результат вычисления значения потенциала поля потенциалов с использованием метода замещающего заряда (Substitute Charge Method) (также называемого методом суперпозиции зарядов (Charge Superposition Method)). Поле потенциалов, в котором в левосторонняя граничная линия EL информации о левосторонней границе пригодной для движения области дороги является первым значением потенциала (+3 В в примере, показанном на фиг. 6), а правосторонняя граничная линия ER информации о правосторонней границе пригодной для движения области дороги является вторым значением потенциала (-3 В в примере, показанном на фиг.6), отличным от первого значения потенциала (+3 В), генерируется в двумерном пространстве (плоскости xy) пригодной для движения области TA дороги. Между левосторонней граничной линией EL, обозначенной набором последовательных прямых линий, и правосторонней граничной линией ER, также обозначенной набором последовательных прямых линий, находится пригодная для движения область TA дороги. Метод замещающего заряда применяется к двумерному пространству, в котором существует пригодная для движения область TA дороги, с использованием компьютерного моделирования. Затем проиллюстрированы эквипотенциальные линии электрического заряда (эквипотенциальные линии) электрического поля, когда напряжение +3 B приложено к левосторонней граничной линии EL, а напряжение -3 В приложено к правосторонней граничной линии ER. То есть, фиг. 6 показывает результат вычисления значения потенциала, который является решением уравнения Лапласа в двумерном пространстве пригодной для движения области TA дороги, образованной между левосторонней граничной линией EL и правосторонней граничной линией ER, с использованием метода замещающего заряда.
[0028]
Фиг. 7 является графиком, иллюстрирующим значение потенциала (электрического заряда) в сечении по линии VII-VII пригодной для движения области TA дороги, показанной на фиг. 6. Значение «+P» потенциала на вертикальной оси на фиг. 7 соответствует +3 В на фиг. 6, а значение «-P» потенциала на вертикальной оси на фиг. 7 соответствует -3 В на фиг. 6. Затем на фиг. 7, авторами настоящего изобретения было подтверждено, что градиент k значения потенциала от левосторонней граничной линии EL до правосторонней граничной линии ER по существу постоянный. Следовательно, когда значение потенциала является P, ширина пригодной для движения области дороги является W, а градиент является k, уравнение kW = 2P реализуется из графика на фиг. 7, то возможно вычислить ширину W пригодной для движения области дороги на основе уравнения W = 2P/k.
[0029]
Здесь уравнение Лапласа представляет собой дифференциальное уравнение, которое решает поле потенциалов стационарного состояния по характеру (состояния, которое не изменяется со временем, то есть, состояния, в котором нет изменяющейся во времени переменной). Уравнение Лапласа включает в себя, например, электростатический потенциал в однородной среде без распределения заряда, как показано на фиг. 6, уравнение диффузии для теплопроводности относительно распределения температуры в твердом теле, контактирующем с источником тепла, и уравнение для решения гравитационного потенциала в гравитационном поле. В частности, уравнением является (∂2E/∂x2) + (∂2E/∂y2) = 0 для квадратичной функции E в двумерном пространстве (x, y) пригодной для движения области TA дороги, как в настоящем варианте осуществления.
[0030]
Более того, при вычислении решения этого уравнения Лапласа оно может быть вычислено с использованием функции, которая может соответствовать непрерывному дифференцированию второго порядка уравнения Лапласа (далее именуемому гармонической функцией). То есть, для квадратичной функции E в двумерном пространстве (x, y) пригодной для движения области TA дороги, как в настоящем варианте осуществления, E = ax+by+c, E = a ln(√(x2+y2)) становится гармонической функцией. В уравнении a, b и c - константы, а ln - натуральный логарифм. Следует отметить, что предполагается, что гармоническая функция является функцией, которую можно дифференцировать непрерывным дифференцированием второго порядка, но это также функция, которую можно дифференцировать бесконечно. Здесь для двумерного пространства (x, y) пригодной для движения области TA дороги, как в настоящем варианте осуществления, существует пара следующих гармонических функций E, F, удовлетворяющих уравнению (∂E/∂x)(∂F/∂x)+(∂E/∂y)(∂F/∂y) = 0. Комплексная функция G(x, y) = E(x, y)+iF(x, y), полученная с использованием парных функций E и F, является разновидностью гармонической функции, которая удовлетворяет уравнению Лапласа. Она называется регулярной аналитической функцией и имеет удобную для вычислений функцию.
[0031]
Блок 101 вычисления значения потенциала, показанный на фиг. 2, применяет метод замещающего заряда к двумерному пространству (плоскости xy) пригодной для движения области TA дороги и находит решение уравнения Лапласа для электрического поля. В частности, блок 101 вычисления значения потенциала использует гармоническую функцию в качестве базисной функции, которая задана положением, направлением и длиной каждого линейного участка информации о последовательных прямых линиях информации о левосторонней границе пригодной для движения области дороги и информации о правосторонней границе пригодной для движения области дороги, и использует приближенное решение этих линейных комбинаций. Здесь блок 101 вычисления значения потенциала выбирает среднюю точку каждого линейного сегмента информации о последовательных прямых линиях в качестве места, в котором применяются условия Дирихле, и применяет метод замещающего заряда для получения коэффициента линейных комбинаций. Более конкретно, тогда как двумерное пространство (плоскость xy) пригодной для движения области TA дороги используется в качестве комплексной плоскости, информация о границах пригодной для движения области дороги преобразуется в информацию комплексного числа, а базисная функция представляет собой комплексную регулярную аналитическую функцию. Используя комплексный потенциал в качестве приближенного решения этих линейных комбинаций, возможно получить электрический заряд (значение потенциала) во всей или части позиции в двумерном пространстве (плоскости xy). Комплексная регулярная аналитическая функция в качестве базисной функции задается следующим образом: f(z) = ln(z1-z)+ln{(z1-z)/(z0-z)}(z0-z)/(z1-z0), где z представляет собой комплексную переменную. Таким образом, когда пригодная для движения область TA дороги, которая является объектом поля потенциалов, задается как комплексная плоскость, и информация о левой границе левосторонней граничной линии EL и информация о правой границе правосторонней граничной линии ER преобразуется в информацию комплексного числа, легко получить градиент k. Поэтому блок 103 вычисления градиента на основе уравнения W = 2P/k, проиллюстрированного на фиг. 7, вычисляет ширину W пригодной для движения области дороги и выводит ее в блок 9 установки граничных условий.
[0032]
Однако при вычислении всех электрических зарядов (значений потенциала) в плоскости xy пригодной для движения области TA дороги блоком 101 вычисления значения потенциала вычислительная нагрузка велика, и время вычисления также велико. Поэтому блок 102 вычисления эквипотенциальной линии получает эквипотенциальные линии электрического заряда (эквипотенциальные линии) путем поиска опорного положения, в котором электрический заряд (значение потенциала) является равным. Например, в пригодной для движения области TA дороги, показанной на фиг. 6, электрическое поле с +3 В, примененным для левосторонней граничной линии EL, и -3 В, примененным для правосторонней граничной линии ER, генерируется как поле потенциалов. Поэтому положение 0 В как промежуточное значение, то есть центральная точка пригодной для движения области TA дороги, ищется вдоль направления движения рассматриваемого транспортного средства V. Фиг. 11 является видом сверху, поясняющим, как искать такие эквипотенциальные линии.
[0033]
На левой диаграмме фиг. 11 блок 102 вычисления эквипотенциальной линии предварительно устанавливает положение как начальную точку центральной линии пригодной для движения области TA дороги перед положением движения рассматриваемого транспортного средства V и вычисляет центральную точку надлежащей пригодной для движения области TA дороги с использованием метода Ньютона. Метод Ньютона (также называемый методом Ньютона-Рафсона) представляет собой итерационный алгоритм поиска корней для решения системы уравнений путем численного расчета. Вычисляется точка пересечения между касательной функции при предварительно установленном по умолчанию xn и потенциалом P = 0, и это устанавливается как xn+1. Затем вычисляется точка пересечения между касательной функции при значении xn+1 и потенциалом P = 0, и это устанавливается как xn+2. Метод Ньютона представляет собой алгоритм определения положения TR0 начальной точки центральной точки надлежащей пригодной для движения области TA дороги путем повторения этого алгоритма.
[0034]
Блок 102 вычисления эквипотенциальной линии вычисляет правильное начальное положение TR0 центральной линии пригодной для движения области TA дороги с помощью метода Ньютона, описанного выше, а затем, как показано на правой диаграмме фиг. 11, вычисляет центральную точку пригодной для движения области TA дороги в позиции TR1, которая является заранее определенным расстоянием впереди позиции движения рассматриваемого транспортного средства V, с использованием метода Рунге-Кутты четвертого порядка (RK4). Здесь метод Рунге-Кутты четвертого порядка (RK4) представляет собой численный метод решения известного дифференциального уравнения с начальными условиями с использованием члена четвертого порядка, разработанный Тейлором. Например, когда функцией является f(x, y) = dy/dx и значения по умолчанию x = 0, y = 0, ряд Тейлора четвертого порядка y(x0+h) в позиции x0+h впереди на заданное расстояние h равно y(x0+h) = y0+hf(x0, y0)+hf(x0+h/2, y0+k1/2)+hf (x0+h/2, y0+k2/2)+hf(x0+h, y0+k3). В уравнении применяется k1 = hf(x0, y0), k2 = hf (x0+h/2, y0+k1/2), k3 = hf(x0+h/2, y0+k2/2), k4 = hf(x0+h, y0+k3) и k = (k1+2k2+2k3+k4)/6. Блок 102 вычисления эквипотенциальной линии повторяет этот процесс для вычисления центральной точки пригодной для движения области TA дороги в позиции TRn впереди пригодной для движения области TA дороги, как показано на правой диаграмме фиг. 11. Затем блок 102 вычисления эквипотенциальной линии объединяет эти центральные точки, чтобы сформировать центральную линию CL пригодной для движения области TA дороги, и выводит ее в блок 103 вычисления градиента. Блок 103 вычисления градиента вместе с шириной W пригодной для движения области дороги, вычисленной выше, сохраняет информацию о центральной линии CL пригодной для движения области TA дороги и выводит их в блок 9 установки граничных условий.
[0035]
Обращаясь к фиг. 1, блок 9 установки граничных условий устанавливает граничное условие на основе ширины W пригодной для движения области дороги и центральной линии CL пригодной для движения области TA дороги, полученных из блока 10 вычисления ширины пригодной для движения области дороги, и поперечного положения, полученного из блока 8 указания поперечного положения. Фиг. 8 и 9 являются графиками, иллюстрирующими значение потенциала в сечении по линии VII-VII, показанной на фиг. 6. На графиках показано сплошной линией значение потенциала, включая ширину W пригодной для движения области дороги и центральную линию CL пригодной для движения области TA дороги, полученные из блока 10 вычисления ширины пригодной для движения области дороги, и пунктирной линией значение потенциала относительно поперечного положения, полученного из блока 8 указания поперечного положения.
[0036]
То есть в сцене, показанной на фиг. 8, значение потенциала левосторонней граничной линии EL, обозначенной сплошной линией, равно +P, значение потенциала правосторонней граничной линии ER равно -P, центральной линией пригодной для движения области TA дороги является CL. В отличие от этого, команда из блока 8 указания поперечного положения указывает смещение положения на X1 (m) в левом направлении от центральной линии CL пригодной для движения области TA дороги. В этом примере блок 9 установки граничных условий вычисляет значение P1L потенциала левосторонней граничной линии EL и значение -P1R потенциала правосторонней граничной линии ER, которые являются граничными условиями. Как показано пунктирной линией, положение, в котором значение P потенциала становится равным 0, является положением CLa, смещенным на X1 в левом направлении от центральной линии CL пригодной для движения области TA дороги. В частности, градиент k получают из блока 103 вычисления градиента блока 10 вычисления ширины пригодной для движения области дороги, указанный сплошной линией, а P1L и P1R вычисляют с использованием соотношений P1L = +P-kX1, P1R = -P-kX1. Эти значения P1L и P1R потенциала выводят в качестве граничные условия в блок 111 коррекции граничных условий блока 11 вычисления маршрута движения, описанного ниже.
[0037]
В сцене, показанной на фиг. 9, значение потенциала левосторонней граничной линии EL, обозначенной сплошной линией, равно +P, значение потенциала правосторонней граничной линии ER равно -P, центральной линией пригодной для движения области TA дороги является CL. В отличие от этого, команда из блока 8 указания поперечного положения указывает смещение положения на X2 (m) в левом направлении от правосторонней граничной линии ER пригодной для движения области TA дороги. В этом примере блок 9 установки граничных условий вычисляет значение P1L потенциала левосторонней граничной линии EL и значение -P1R потенциала правосторонней граничной линии ER, которые являются граничными условиями. Как показано пунктирной линией, положение, в котором значение P потенциала становится равным 0, является положением CLa, смещенным на X2 в левом направлении от правосторонней граничной линии пригодной для движения области TA дороги. В частности, градиент k получают из блока 103 вычисления градиента блока 10 вычисления ширины пригодной для движения области дороги, указанный сплошной линией, а P1L и P1R вычисляют с использованием соотношений P1L = +P-(2P2/kX2), P1R = -P. Эти значения P1L и P1R потенциала выводят в качестве граничных условий в блок 111 коррекции граничных условий блока 11 вычисления маршрута движения, описанного ниже.
[0038]
Обращаясь к фиг. 1, блок 11 вычисления маршрута движения вычисляет маршрут TR движения рассматриваемого транспортного средства V на основе информации о комбинированных границах пригодной для движения области дороги, полученной из блока 6 комбинирования границ пригодной для проезда области дороги, и граничных условий, полученных из блока 9 установки граничных условий, и выводит его в блок 12 управления отслеживанием маршрута движения. ФИГ. 3 является блок-схемой, иллюстрирующей конкретную конфигурацию блока 11 вычисления маршрута движения, показанного на фиг. 1. Фиг. 12 является видом сверху, иллюстрирующим маршрут TR движения, вычисленный блоком 11 вычисления маршрута движения. Блок 11 вычисления маршрута движения, как показано на фиг. 3, содержит блок 111 коррекции граничных условий, блок 112 вычисления значения потенциала, блок 113 вычисления эквипотенциальной линии и блок 114 вычисления градиента.
[0039]
Блок 111 коррекции граничных условий корректирует значение потенциала левосторонней граничной линии EL, относящейся к информации о левой границе, и значение потенциала правосторонней граничной линии ER, относящейся к информации о правой границе, которая включена в информацию о комбинированных границах пригодной для движения области дороги, на основе информации о комбинированных границах пригодной для движения области дороги, полученной от блока 6 комбинирования границ пригодной для движения области дороги, и граничных условий, полученных от блока 9 установки граничных условий. Как показано на фиг. 8 и 9, коррекция значения потенциала выполняется для участка, в котором существует разность между центральной линией CL пригодной для движения области дороги до коррекции, и поперечным положением, полученным из блока 8 указания поперечного положения (центральной линией CLa пригодной для движения области дороги после коррекции, обозначенной пунктирной линией на фиг. 8 и 9). То есть для участка, в котором граничные условия, установленные блоком 9 установки граничных условий, которые получены из блока 10 вычисления ширины пригодной для движения области дороги и блока 8 указания поперечного положения, отличаются от значения потенциала, первоначально установленного блоком 101 вычисления значения потенциала блока 10 вычисления ширины пригодной для движения области дороги, корректируется соответствующий потенциал. Для других участков значения потенциала, первоначально установленные блоком 101 вычисления значения потенциала, используются как есть.
[0040]
Другими словами, на участке пригодной для движения области TA дороги впереди рассматриваемого транспортного средства V, когда ситуация такая, как проиллюстрировано на фиг. 8, для участка значение +P потенциала левосторонней граничной линии EL корректируется до P1L, а значение -P потенциала правосторонней граничной линии ER корректируется до -P1R. Подобно этому, на участке пригодной для движения области TA дороги впереди рассматриваемого транспортного средства V, когда ситуация такая, как проиллюстрировано на фиг. 9, для участка значение +P потенциала левосторонней граничной линии EL корректируется до P1L, а значение -P потенциала правосторонней граничной линии ER устанавливается без коррекции.
[0041]
Блок 112 вычисления значения потенциала выполняет тот же процесс, что и блок 101 вычисления значения потенциала блока 10 вычисления ширины пригодной для движения области дороги, проиллюстрированного на фиг. 2, за исключением корректировки значения потенциала левосторонней граничной линии EL и значения потенциала правосторонней граничной линии ER относительно информации о правой границе. Для двумерного пространства (плоскости xy) пригодной для движения области TA дороги, показанного на фиг. 5, блок 112 вычисления значения потенциала устанавливает скорректированное значение +P1L, -P1R потенциала для участка, скорректированное блоком 111 коррекции граничных условий, и устанавливает начальное значение +P, -P потенциала для участка, не скорректированное, в качестве значения потенциала левосторонней граничной линии EL и значение потенциала правосторонней граничной линии ER, соответственно. Затем блок 112 вычисления значения потенциала использует метод замещающего заряда (также называемый методом суперпозиции зарядов) для генерации поля потенциалов в двумерном пространстве (плоскости xy) пригодной для движения области TA дороги и вычисляет решение Уравнения Лапласа для электрического поля. В частности, в качестве базисной функции используется гармоническая функция, заданная положением, направлением и длиной каждого линейного участка информации о последовательных прямых линиях информации о левосторонней границе пригодной для движения области дороги и информации о правосторонней границе пригодной для движения области дороги, и используется приближенное решение этих линейных комбинаций. Здесь средняя точка каждого линейного участка информации о последовательных прямых линиях выбирается в качестве места, в котором применяются условия Дирихле, и применяется метод замещающего заряда для получения коэффициента линейных комбинаций. Более конкретно, двумерное пространство (плоскость xy) пригодной для движения области TA дороги используется в качестве комплексной плоскости, информация о границах пригодной для движения области дороги преобразуется в информацию комплексного числа, а базисная функция представляет собой комплексную регулярную аналитическую функцию. Используя комплексный потенциал в качестве приближенного решения этих линейных комбинаций, возможно получить электрический заряд (значение потенциала) во всей или части позиции в двумерном пространстве (плоскости xy). Комплексная регулярная аналитическая функция в качестве базисной функции задается следующим образом: f(z) = ln(z1-z)+ln{(z1-z)/(z0-z)}(z0-z)/(z1-z0), где z представляет собой комплексную переменную.
[0042]
Блок 113 вычисления эквипотенциальной линии получает эквипотенциальные линии электрического заряда (эквипотенциальные линии) путем поиска опорного положения, в котором электрический заряд (значение потенциала) равный, аналогично блоку 102 вычисления эквипотенциальной линии блока 10 вычисления ширины пригодной для движения области дороги, показанного на фиг. 2. Например, в пригодной для движения области TA дороги, показанной на фиг. 6, электрическое поле с +3 В или скорректированным значением потенциала, примененным для левосторонней граничной линии EL, и -3 В или скорректированным значением потенциала, примененным для правосторонней граничной линии ER, генерируется как поле потенциалов. Поэтому положение 0 В как промежуточное значение, то есть центральная точка пригодной для движения области TA дороги, ищется вдоль направления движения рассматриваемого транспортного средства V.
[0043]
То есть, на левом виде фиг. 11 блок 113 вычисления эквипотенциальной линии предварительно устанавливает положение как начальную точку центральной линии пригодной для движения области TA дороги для пригодной для движения области TA дороги перед положением движения рассматриваемого транспортного средства V и вычисляет центральную точку надлежащей пригодной для движения области TA дороги с использованием метода Ньютона. Блок 113 вычисления эквипотенциальной линии вычисляет правильное начальное положение TR0 центральной линии пригодной для движения области TA дороги с помощью метода Ньютона, описанного выше, а затем, как показано на правой диаграмме фиг. 11, вычисляет центральную точку пригодной для движения области TA дороги в позиции TR1, которая является заранее определенным расстоянием впереди направления движения рассматриваемого транспортного средства V, с использованием метода Рунге-Кутты четвертого порядка (RK4). Затем блок 113 вычисления эквипотенциальной линии повторяет этот процесс для вычисления центральной точки пригодной для движения области TA дороги в позиции TRn впереди пригодной для движения области TA дороги, как показано на правой диаграмме фиг. 11. Затем блок 12 вычисления эквипотенциальной линии, как показано на фиг. 12, объединяет эти центральные точки, чтобы сформировать центральную линию CL пригодной для движения области TA дороги в качестве маршрута TR движения, и выводит ее в блок 114 вычисления градиента. Блок 114 вычисления градиента вместе с шириной W пригодной для движения области дороги, вычисленной выше, сохраняет информацию о маршруте TR движения и выводит ее в блок 12 управления отслеживанием маршрута движения.
[0044]
В этом случае, блок 113 вычисления эквипотенциальной линии также вычисляет центральную точку пригодной для движения области TA дороги в позиции TRn впереди пригодной для движения области TA дороги для участка, в котором значение потенциала левосторонней граничной линии EL и/или правосторонней граничной линии ER корректируется блоком 111 коррекции граничных условий. Это потому, что, как показано на фиг. 8 и 9, решение уравнения Лапласа, полученное с использованием значения потенциала скорректированных левосторонней граничной линии EL и/или правосторонней граничной линии ER, соответствует скорректированной центральной линии CLa пригодной для движения области дороги.
[0045]
Блок 12 управления отслеживанием маршрута движения устанавливает маршрут TR движения рассматриваемого транспортного средства V, полученный из блока 11 вычисления маршрута движения, в качестве целевого маршрута. Блок 12 управления отслеживанием маршрута движения управляет устройством рулевого управления, включающим в себя исполнительный механизм рулевого управления, который выполняет управление рулевым управлением рассматриваемого транспортного средства V, устройством ускорения и замедления, включающим в себя исполнительный механизм ускорения (или впрыск топлива, или ток электродвигателя источника привода), который выполняет управление ускорением или замедлением рассматриваемого транспортного средства V, и тормозным устройством, включающим в себя тормозной исполнительный механизм, который выполняет управление торможением рассматриваемого транспортного средства V.
[0046]
Далее, со ссылкой на блок-схему последовательности операций на фиг. 4 описывается процедура управления устройством VTC управления движением транспортного средства согласно настоящему варианту осуществления. Фиг. 4 является блок-схемой последовательности операций, иллюстрирующей процедуру обработки, выполняемую устройством VTC управления движением транспортного средства, показанным на фиг. 1. Конфигурация устройства VTC управления движением транспортного средства согласно настоящему варианту осуществления, описанному выше, основана на обобщенных дорогах, как проиллюстрировано на фиг. 5, 6, 11 и 12. Однако в следующей процедуре управления, чтобы облегчить понимание работы и эффективности настоящего варианта осуществления, будет описана сцена, в которой рассматриваемое транспортное средство V движется по простой дороге R, показанной на фиг. 13. Дорога R, показанная на фиг.13, иллюстрирует одну полосу движения с левой стороны в стране с законодательством о дорожном движении и правилами движения для левостороннего движения, например, Японии или Великобритании. Кроме того, предполагается, что эта дорога R шире, чем общая ширина дороги, равная 3,5 м, например, около 5-6 м, и парковка разрешена на боковой стороне дороги.
[0047]
Сначала на этапе S1 на фиг. 4 обнаруживают информацию о первой границе пригодной для движения области дороги в горизонтальной плоскости области дороги, в которой может двигаться рассматриваемое транспортное средство V. Информацию о первой границе пригодной для движения области дороги обнаруживают на основе информации о текущем местоположении рассматриваемого транспортного средства V, полученной блоком 1 получения границ пригодной для движения области дороги, и картографической информации, в которой задана информация о границах дороги. В то же время, на этапе S2 в качестве информации об окружении получают объекты вокруг рассматриваемого транспортного средства и дорожные ситуации, полученные блоками 2-5 получения границ пригодной для движения области дороги. Затем на основании информации об окружении обнаруживают информацию о второй границе пригодной для движения области дороги в горизонтальной плоскости области дороги, в которой может двигаться рассматриваемое транспортное средство V. Информация о первой границе пригодной для движения области дороги позволяет распознавать формы дороги, отличные от препятствий, в окрестностях рассматриваемого транспортного средства V, а информация о второй границе пригодной для движения области дороги позволяет распознавать наличие или отсутствие и тип как ближних, так и дальних препятствий вокруг рассматриваемого транспортного средства V.
[0048]
На этапе S3 блок 6 комбинирования границ пригодной для движения области дороги комбинирует информацию о первой границе пригодной для движения области дороги и информацию о второй границе пригодной для движения области дороги, полученную блоками 1-5 получения границ пригодной для движения области дороги, для генерации информации о комбинированных границах пригодной для движения области дороги. То есть для сцены, показанной на фиг. 13, блок 6 комбинирования границ пригодной для движения области дороги вычисляет пригодную для движения область TA дороги, в которой может двигаться рассматриваемое транспортное средство V. Пригодную для движения область TA дороги вычисляют путем вычитания области присутствия препятствий V1, V2 и V3, распознанной из информации о местоположении препятствий V1, V2 и V3, полученной блоками 2-5 получения границ пригодной для движения области дороги, из области дороги R, распознанной из информации о текущем местоположении рассматриваемого транспортного средства V, полученной блоком 1 получения границ пригодной для движения области дороги, и информации трехмерной карты высокого разрешения о его окружении.
[0049]
Кроме того, на этапе S4 блок 6 комбинирования границ пригодной для движения области дороги делит информацию о комбинированных границах пригодной для движения области дороги на информацию о левосторонней границе пригодной для движения области дороги, относящуюся к левосторонней граничной линии EL, и информацию о правосторонней границе пригодной для движения области дороги, относящуюся к правосторонней граничной линии ER, в пригодной для движения области дороги, в которой может двигаться рассматриваемое транспортное средство V. Что касается сцены, проиллюстрированной на фиг. 13, поскольку блоки 2-5 получения границ пригодной для движения области дороги получают наличие трех неподвижных препятствий (припаркованных транспортных средств) V1, V2 и V3 на левой стороне дороги R, левосторонняя граничная линия EL является линией, показанной пунктирной линией. С другой стороны, поскольку на правой стороне дороги R нет препятствий, правосторонняя граничная линия ER совпадает с линией правого края RR дороги. Информация о левосторонней границе пригодной для движения области дороги, относящаяся к разделенной левосторонней граничной линии EL, и информация о правосторонней границе пригодной для движения области дороги, относящаяся к разделенной правосторонней граничной линии ER, указаны на левой диаграмме фиг. 14.
[0050]
Как описано в разделе «Уровень техники», когда маршрут движения транспортного средства генерируется на основе установленных параметров кривизны с помощью машины опорных векторов из левосторонней граничной линии EL, правосторонней граничной линии ER и пригодной для движения области TA дороги, заданных как показано на левой диаграмме фиг. 14, это вызовет дискомфорт у пассажиров. Это связано с тем, что, как показано на правой диаграмме фиг. 14, когда участок, на котором нет припаркованных транспортных средств в качестве препятствий, является длинным, маршрут TR движения на этом участке является волнистым. В частности, для дороги R, имеющей ширину около 5-6 м, как показано на фиг. 13, и для которой разрешена парковка в боковой части от дороги, лучше двигаться по правому краю дороги RR в качестве ориентира, а не двигаться вдоль центра пригодной для движения области TA дороги для генерации плавного маршрута движения с транспортными средствами, припаркованными на боковой части дороги, или без них.
[0051]
Поэтому на этапах S5-S13 устройство VTC управления движением для транспортного средства согласно настоящему варианту осуществления вычисляет текущую пригодную для движения область TA дороги, показанную на левой диаграмме фиг. 14, используя решение уравнения Лапласа, так что смещение положения от правосторонней граничной линии ER в левом направлении на X2 (m) становится маршрутом TR движения рассматриваемого транспортного средства V независимо от того, есть ли припаркованные транспортные средства V1, V2 и V3 на левой стороне дороги.
[0052]
То есть на этапе S5 блок 101 вычисления значения потенциала блока 10 вычисления ширины пригодной для движения области дороги использует метод замещающего заряда для генерации поля потенциалов, как проиллюстрировано на левом виде на фиг. 15, для левосторонней граничной линии EL, правосторонней граничной линии ER и пригодной для движения области TA дороги, заданных ими, как определено на этапе S4. Затем блок 101 вычисления значения потенциала генерирует поле потенциалов в двумерном пространстве пригодной для движения области TA дороги (плоскости xy), где левосторонняя граничная линия EL представляет собой первое значение потенциала (например, +3 В), а правосторонняя граничная линия ER представляет собой второе значение потенциала (например, -3 В). На этапе S6 блок 102 вычисления эквипотенциальной линии получает эквипотенциальные линии электрического заряда (эквипотенциальные линии) путем поиска опорного положения, в котором электрический заряд (значение потенциала) является равным. Затем, на этапе S7, блок 103 вычисления градиента вычисляет градиент k из решения поля потенциалов, а затем вычисляет ширину W пригодной для движения области дороги из уравнения W = 2P/k, показанную на фиг. 7, и выводит ее в блок 9 установки граничных условий. В этом случае, ширина W пригодной для движения области дороги, как показано на правой диаграмме фиг. 15, вычисляется с заранее определенными интервалами расстояний для пригодной для движения области TA дороги перед рассматриваемым транспортным средством V. Блок 103 вычисления градиента вместе с вычисленной шириной W пригодной для движения области дороги сохраняет информацию о центральной линии CL пригодной для движения области TA дороги, и выводит ее в блок 9 установки граничных условий.
[0053]
На этапе S8 блок 7 распознавания дорожной среды, блок 8 указания поперечного положения и блок 9 установки граничных условий сравнивают поперечные положения. Другими словами, блок 8 указания поперечного положения определяет, исходя из дорожной среды и национальной информации, полученной блоком 7 распознавания дорожной среды, что дорога R, по которой движется рассматриваемое транспортное средство V, является полосой движения с множеством припаркованных транспортных средств и страна с левосторонним движением, как показано на фиг. 10. Поэтому, блок 8 указания поперечного положения извлекает в качестве содержимого команды поперечного положения команду для установки положения «X2 (например, 1,5м) от правого края пригодной для движения области дороги» на центральную линию маршрута TR движения. Затем, на этапе S9, блок 9 установки граничных условий определяет, существует ли разность между положением центральной линии CL пригодной для движения области TA дороги с шириной W пригодной для движения области дороги, полученной блоком 10 вычисления ширины пригодной для движения области дороги, и положением в «X2 (например, 1,5m) от правого края пригодной для движения области дороги», извлеченной блоком 8 указания поперечного положения, путем сравнения этих положений, как проиллюстрировано на фиг. 9. В этом определении разность не обязательно должна быть 0, и может быть разрешено наличие такой разности, которая не доставляет ощущения дискомфорта пассажирам. Кроме того, определение наличия или отсутствия этой разности выполняется для каждого заданного интервала расстояния, в котором получают ширину W пригодной для движения области дороги, как показано на правой диаграмме фиг. 15.
[0054]
На этапе S9, когда определено, что существует разность, процесс переходит к этапу S10, а когда определено, что нет никакой разности, процесс переходит к этапу S11. На этапе S10, при этом определено, что существует разность, как показано на фиг. 9, положение центральной линии CL пригодной для движения области TA дороги с шириной W пригодной для движения области дороги, полученной блоком 10 вычисления ширины пригодной для движения области дороги, отличается от положения «X2 (например, 1,5 м) от правого края пригодной для движения области дороги», извлеченного блоком 8 указания поперечного положения. Поэтому, как показано пунктирной линией на фиг. 9, блок 9 установки граничных условий вычисляет значение P1L потенциала левосторонней граничной линии EL и значение -P1R потенциала правосторонней граничной линии ER, которое является граничным условием, так что положение, в котором значение P потенциала становится равным 0, является положением CLa, смещенным на X2 в левом направлении от правосторонней граничной линии пригодной для движения области TA дороги. В частности, градиент k получают блоком 103 вычисления градиента блока 10 вычисления ширины пригодной для движения области дороги, указанный сплошной линией, а P1L и P1R вычисляют с использованием соотношений P1L = +P-(2P2/kX2), P1R = -P. Эти значения P1L и P1R потенциала выводят в качестве граничных условий в блок 111 коррекции граничных условий блока 11 вычисления маршрута движения. Блок 111 коррекции граничных условий корректирует значение потенциала левосторонней граничной линии EL, относящейся к информации о левой границе, полученной блоком 9 установки граничных условий, и значение потенциала правосторонней граничной линии ER, относящейся к информации о правой границе. Левая диаграмма фиг. 16 указывает область, в которой значение потенциала корректируется в пригодной для движения области TA дороги перед рассматриваемым транспортным средством V. В этом примере, как проиллюстрировано на фиг. 9, начальное значение +P потенциала корректируется до большего значения +P1L.
[0055]
На этапе S11 блок 11 вычисления маршрута движения устанавливает скорректированные значения потенциала (или начальные значения потенциала для нескорректированного участка), указанные на фиг. 16, на левостороннюю граничную линию EL и правостороннюю граничную линию ER. Затем блок 11 вычисления маршрута движения использует метод замещающего заряда для генерации поля потенциалов в двумерном пространстве (плоскости xy) пригодной для движения области TA дороги. На этапе S12 блок 113 вычисления эквипотенциальной линии получает эквипотенциальные линии электрического заряда (эквипотенциальные линии) путем поиска опорного положения, в котором электрический заряд (значение потенциала) равный (положение, в котором значение потенциала равно 0 В в этом примере) с использованием описанных выше методов Ньютона и Рунге-Кутты четвертого порядка. Поскольку эти эквипотенциальные линии становятся маршрутом TA движения рассматриваемого транспортного средства V, показанным на правой диаграмме фиг. 16, они выводятся в блок 12 управления отслеживанием маршрута движения в качестве маршрута TA движения на этапе S13. На этапе S12 блок 12 управления отслеживанием маршрута движения выполняет автономное управление движением посредством автономного управления устройством рулевого управления, приводным устройством ускорения и замедления и тормозным устройством рассматриваемого транспортного средства в соответствии с информацией о местоположении полученного маршрута TA движения.
[0056]
В вышеописанном варианте осуществления значение потенциала левосторонней граничной линии EL установлено на +P (например, напряжение +3 В), а значение потенциала правосторонней граничной линии ER установлено на -P (например, напряжение -3 В), и решение уравнения Лапласа, относящееся к значению потенциала пригодной для движения области TA дороги, вычисляется методом замещающего заряда. Таким образом, положение, в котором значение потенциала становится равным 0, устанавливается как положение маршрута TR движения. Однако эти +P, -P и 0 являются просто иллюстративными и не ограничивают настоящее изобретение. В способе управления движением и устройстве управления движением для транспортного средства в соответствии с настоящим изобретением, по меньшей мере, поле потенциалов может быть сгенерировано путем установки значения потенциала левосторонней граничной линии EL и значения потенциала правосторонней граничной линии ER на отличающиеся друг для друга значения, и может быть вычислено значение потенциала, которое является решением уравнения Лапласа. Таким образом, например, когда значение потенциала левосторонней граничной линии EL установлено на +2P (например, напряжение +6 В), а значение потенциала правосторонней граничной линии ER установлено на -P (например, напряжение -3 В), решение уравнения Лапласа для значения потенциала пригодной для движения области TA дороги вычисляется методом замещающего заряда, а положение, в котором значение потенциала становится +3, является маршрутом TR движения, результат будет таким же. Кроме того, решение поля потенциалов не ограничено методом замещающего заряда для электрического поля, а также может быть уравнением диффузии для теплопроводности относительно распределения температуры в твердом теле, контактирующем с источником тепла, как описано выше, оно также может быть уравнением для решения гравитационного потенциала в гравитационном поле.
[0057]
Как описано выше, согласно устройству VTC управления движением и способу управления движением для транспортного средства в соответствии с настоящим вариантом осуществления, поперечное положение маршрута движения, установленное заранее, и поперечное положение маршрута движения, установленное на основе вычисленной ширины пригодной для движения области TA дороги, сравнивают для вычисления разности. Затем первое значение потенциала и/или второе значение потенциала корректируют так, чтобы абсолютное значение вычисленных разностей было равно заданному значению или меньше. Затем маршрут движения для рассматриваемого транспортного средства в соответствии с эквипотенциальными линиями поля потенциалов генерируют с помощью скорректированного значения потенциала. Поэтому, независимо от наличия или отсутствия препятствий, возможно сгенерировать маршрут движения по заранее установленному поперечному положению маршрута движения путем вычисления с низкой нагрузкой. Таким образом, можно добиться плавного автономного управления движением, исключив дискомфорт пассажиров.
[0058]
Кроме того, согласно устройству VTC управления движением и способу управления движением для транспортного средства в соответствии с настоящим вариантом осуществления, при получении информации о левосторонней границе пригодной для движения области дороги и информации о правосторонней границе пригодной для движения области дороги, информации о первой границе пригодной для движения области дороги в горизонтальной плоскости области дороги, в которой может двигаться рассматриваемое транспортное средство, обнаруживают на основе информации о текущем местоположении рассматриваемого транспортного средства и картографической информации, в которой задана информация о границах дороги. Затем объекты вокруг рассматриваемого транспортного средства и дорожные ситуации получают в качестве информации об окружении для обнаружения информации о второй границе пригодной для движения области дороги в горизонтальной плоскости дорожной области, в которой может двигаться рассматриваемое транспортное средство, на основе информации об окружении. Затем информацию о комбинированных границах пригодной для движения области дороги генерируют путем комбинирования информации о первой границе пригодной для движения области дороги и информации о второй границе пригодной для движения области дороги, и информацию о комбинированных границах пригодной для движения области дороги разделяют на информацию о левосторонней границе пригодной для движения области дороги и информацию о правосторонней границе пригодной для движения области дороги. Поэтому с помощью информации о первой границе пригодной для движения области дороги возможно распознать формы дороги, отличные от препятствий, в окрестностях рассматриваемого транспортного средства V. Кроме того, с помощью информации о второй границе пригодной для движения области дороги возможно распознать присутствие или отсутствие и тип как ближних, так и дальних препятствий вокруг рассматриваемого транспортного средства V. В результате возможно получить информацию о левосторонней границе пригодной для движения области дороги и информацию о правосторонней границе пригодной для движения области дороги, которые содержат как статическую информацию, так и динамическую информацию высокого разрешения.
[0059]
Кроме того, согласно устройству VTC управления движением и способу управления движением для транспортного средства в соответствии с настоящим вариантом осуществления, заранее установленное поперечное положение маршрута движения является одним из поперечного центрального положения пригодной для движения области дороги, положения, удаленного от правого края пригодной для движения области дороги в левом направлении на первое заданное расстояние, и положения, удаленного от левого края пригодной для движения области дороги в правом направлении на второе заданное расстояние. Таким образом, когда поперечным положением является поперечное центральное положение пригодной для движения области дороги, возможно сгенерировать маршрут движения, который дает пассажирам более высокое чувство безопасности. С другой стороны, когда поперечным положением является положение, удаленное от правого края пригодной для движения области дороги в левом направлении на первое заданное расстояние, или положение, удаленное от левого края пригодной для движения области дороги в правом направлении на второе заданное расстояние, возможно сгенерировать маршрут движения, соответствующий дорожной среде.
[0060]
Кроме того, согласно устройству VTC управления движением и способу управления движением для транспортного средства в соответствии с настоящим вариантом осуществления, поперечные положения маршрута движения и поперечные положения, связанные с информацией о дорожной среде, в которой движется транспортное средство, сохраняются заранее. Затем информацию о дорожной среде, в которой движется рассматриваемое транспортное средство, получают для извлечения поперечного положения маршрута движения, связанного с информацией о дорожной среде, на основе сохраненного поперечного положения. Поэтому маршрут движения, соответствующий дорожной среде, может быть сгенерирован без увеличения вычислительной нагрузки.
[0061]
Кроме того, согласно устройству VTC управления движением и способу управления движением для транспортного средства настоящего варианта осуществления, вычисляется каждая частота в направлении движения информации о левосторонней границе пригодной для движения области дороги и информации о правосторонней границе пригодной для движения области дороги. Затем, поперечное положение маршрута движения извлекают на основе информации о границах пригодной для движения области дороги с меньшей частотой информации о левосторонней границе пригодной для движения области дороги и частотой информации о правосторонней границе пригодной для движения области дороги. Поэтому возможно реализовать плавное автономное управление движением, дополнительно устраняя дискомфорт пассажиров.
[0062]
Кроме того, согласно устройству VTC управления движением и способу управления движением для транспортного средства настоящего варианта осуществления, приближенное решение уравнения Лапласа используется для значения потенциала поля потенциалов. Поэтому генерация волнистого маршрута движения подавляется, возможно реализовать плавное автономное управление движением, дополнительно устраняя дискомфорт пассажиров.
[0063]
Кроме того, согласно устройству VTC управления движением и способу управления движением для транспортного средства в соответствии с настоящим вариантом осуществления информация о левосторонней границе пригодной для движения области дороги и информация о правосторонней границе пригодной для движения области дороги преобразуется в информацию о последовательных прямых линиях соответственно, и гармоническая функция, заданная положением, направлением и длиной каждого линейного участка информации о последовательных прямых линиях, используется в качестве базисной функции, а приближенное решение линейных комбинаций информации о последовательных прямых линиях используется для значения потенциала поля потенциалов. Поэтому, приближенное решение может быть получено путем вычисления с малой нагрузкой.
[0064]
Кроме того, согласно устройству VTC управления движением и способу управления движением для транспортного средства настоящего варианта осуществления информация о границах пригодной для движения области дороги преобразуется в информацию комплексного числа с целевой горизонтальной плоскостью в качестве комплексной плоскости, базисная функция используется как комплексная регулярная аналитическая функция, и комплексный потенциал в качестве приближенного решения линейных комбинаций используются для значения потенциала поля потенциалов. Поэтому градиент значения потенциала может быть получен при малой вычислительной нагрузке.
[0065]
Кроме того, согласно устройству VTC управления движением и способу управления движением для транспортного средства настоящего варианта осуществления, когда z является комплексной переменной, базисная функция задается как f(z) = ln(z1-z)+ln{(z1-z)/(z0-z)}(z0-z)/(z1-z0). Таким образом, можно получить континуум заряда потенциала, взяв только действительную часть. Поэтому скорость вычисления может быть увеличена, и когда левая граничная линия пригодной для движения области дороги и правая граничная линия пригодной для движения области дороги параллельны, ошибка вычисления может быть снижена до 0.
[0066]
Согласно устройству VTC управления движением и способу управления движением для транспортного средства настоящего варианта осуществления, средняя точка каждого линейного участка информации о последовательных прямых линиях выбирается в качестве местоположения применения условий Дирихле, а коэффициенты линейных комбинаций получаются путем применения метода замещающего заряда. Таким образом, возможно получить результаты вычисления с малой вычислительной нагрузкой и малой ошибкой.
Описание ссылочных позиций
[0067]
VTC… Устройство управления движением для транспортного средства
1… Блок получения границ пригодной для движения области дороги (информация карты высокого разрешения)
2… Блок получения границ пригодной для движения области дороги (информация лазерного дальномера)
3… Блок получения границ пригодной для движения области дороги (радиолокационная информация)
4… Блок получения границ пригодной для движения области дороги (информация камеры)
5… Блок получения границ пригодной для движения области дороги (информация системы кругового обзора)
6… Блок 6 комбинирования границ пригодной для движения области дороги
7… Блок распознавания дорожной среды
8… Блок указания поперечного положения
9… Блок установки граничных условий
10… Блок вычисления ширины пригодной для движения области дороги
101… Блок вычисления значения потенциала
102… Блок вычисления эквипотенциальной линии
103… Блок вычисления градиента
11… Блок вычисления маршрута движения
111… Блок коррекции граничных условий
112… Блок вычисления значения потенциала
113… Блок вычисления эквипотенциальной линии
114… Блок вычисления градиента
12… Блок управления отслеживанием маршрута движения
V… Рассматриваемое транспортное средство
R… Дорога
ТА… Пригодная для движения область дороги
TR… Маршрут движения
EL… Левосторонняя граничная линия
EL… Правосторонняя граничная линия
P… Значение потенциала
PF… Поле потенциалов
W… Ширина пригодной для движения области дороги.

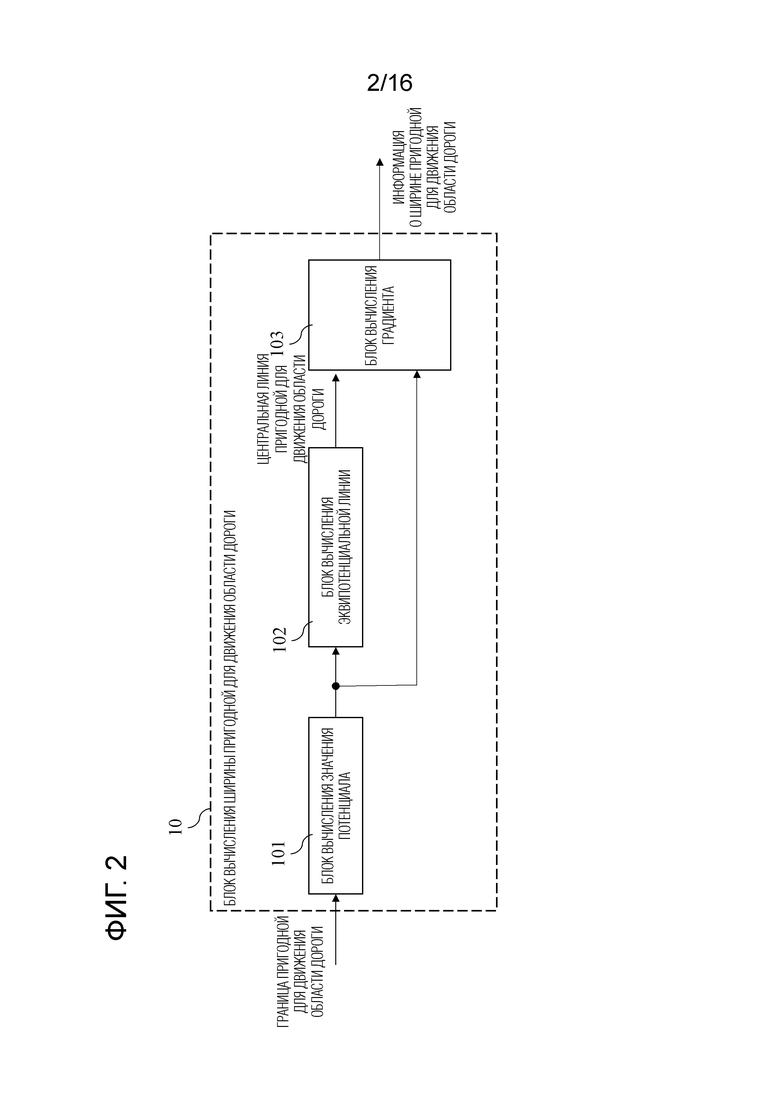

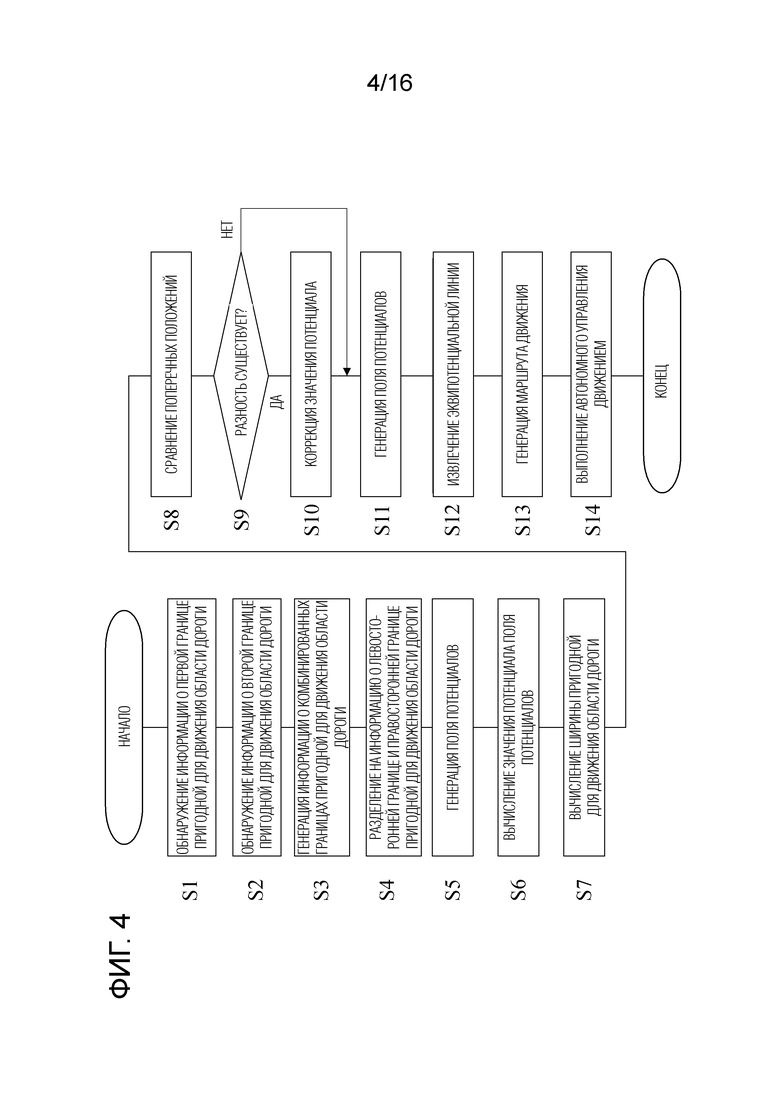
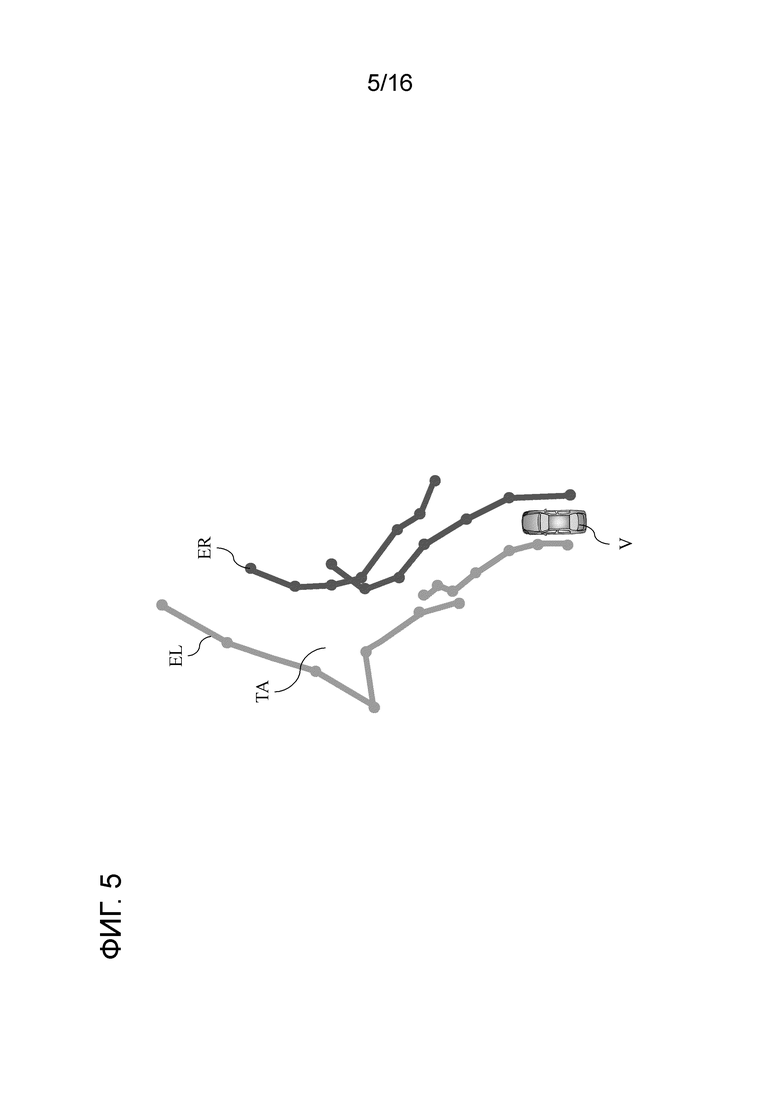

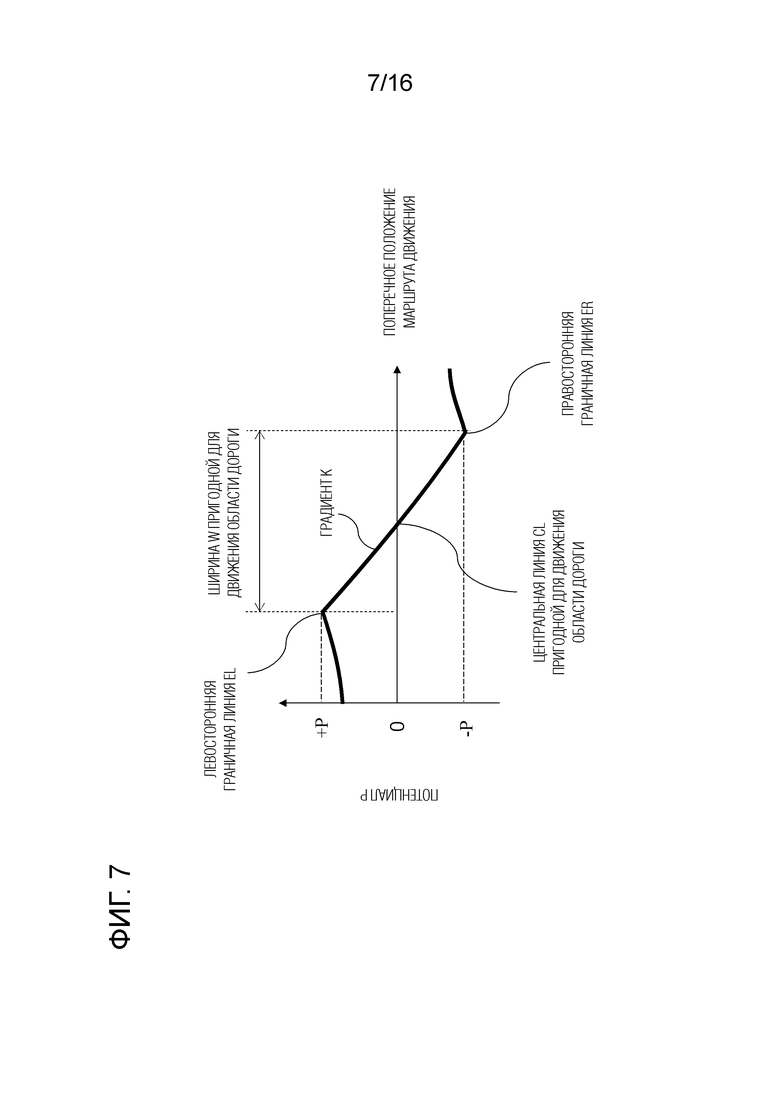
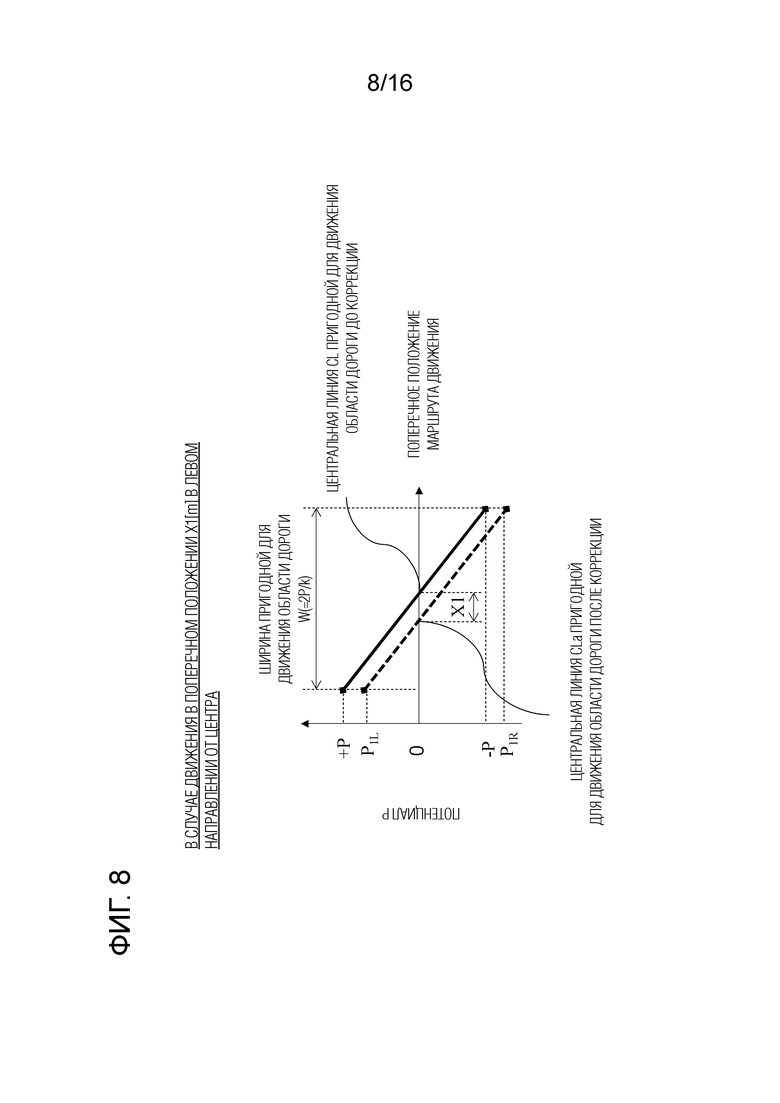
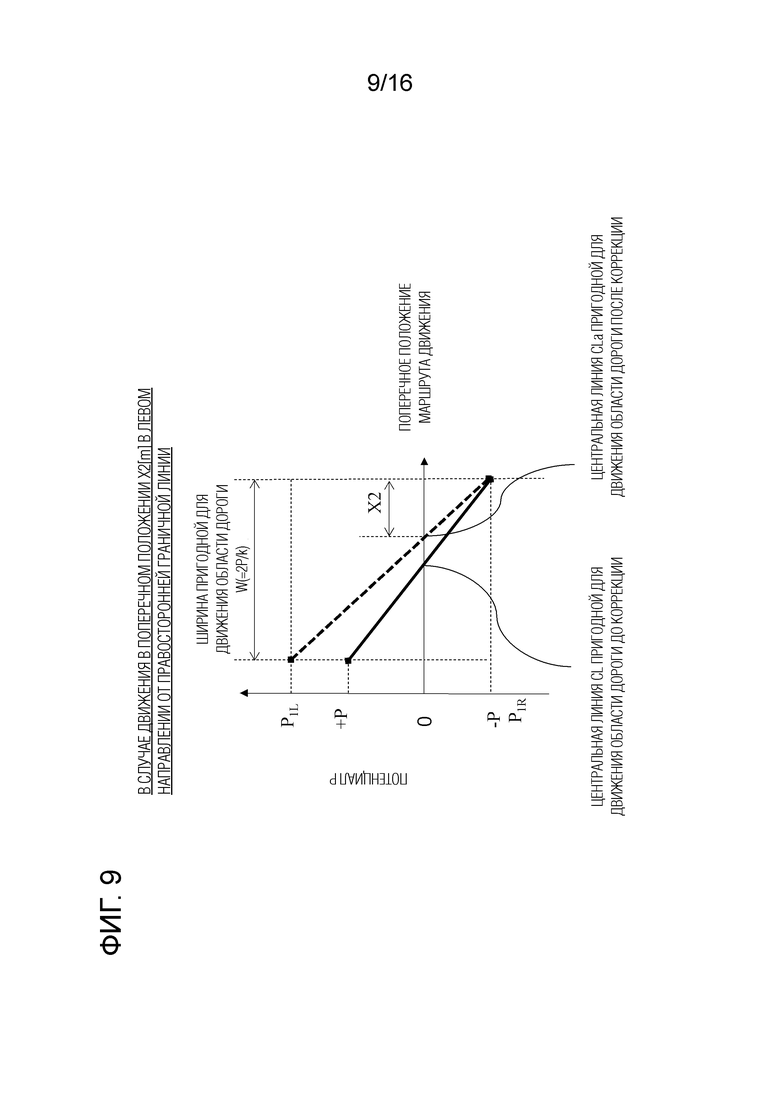
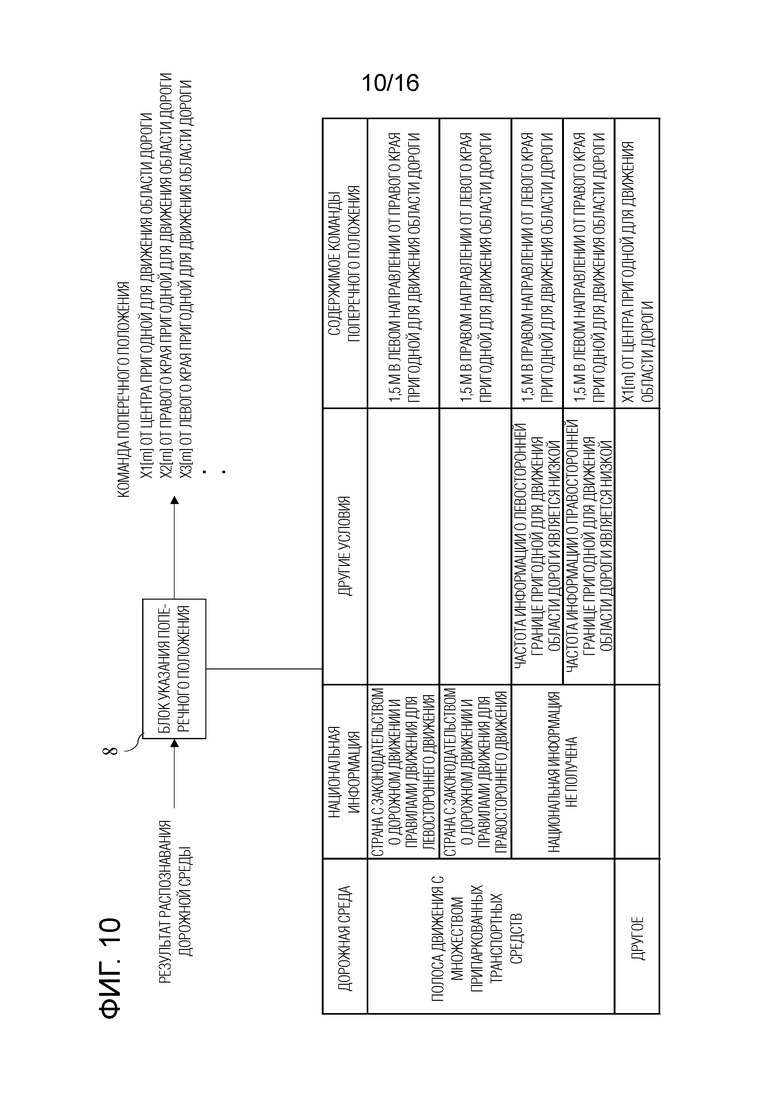


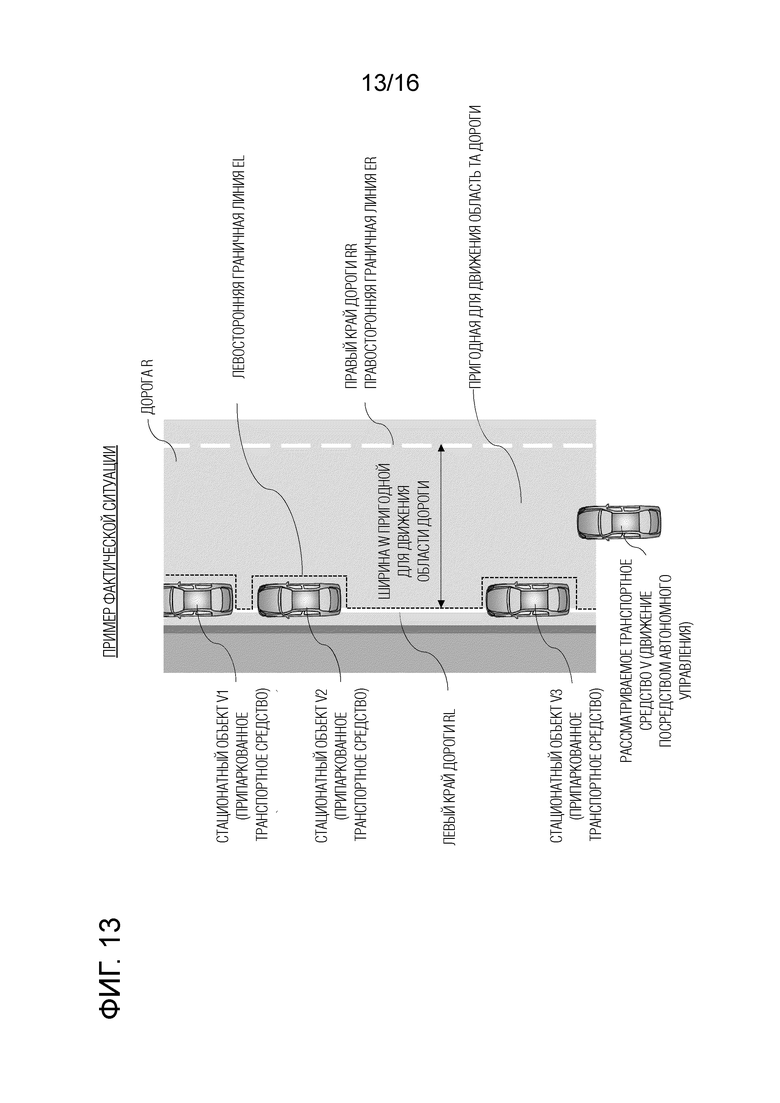

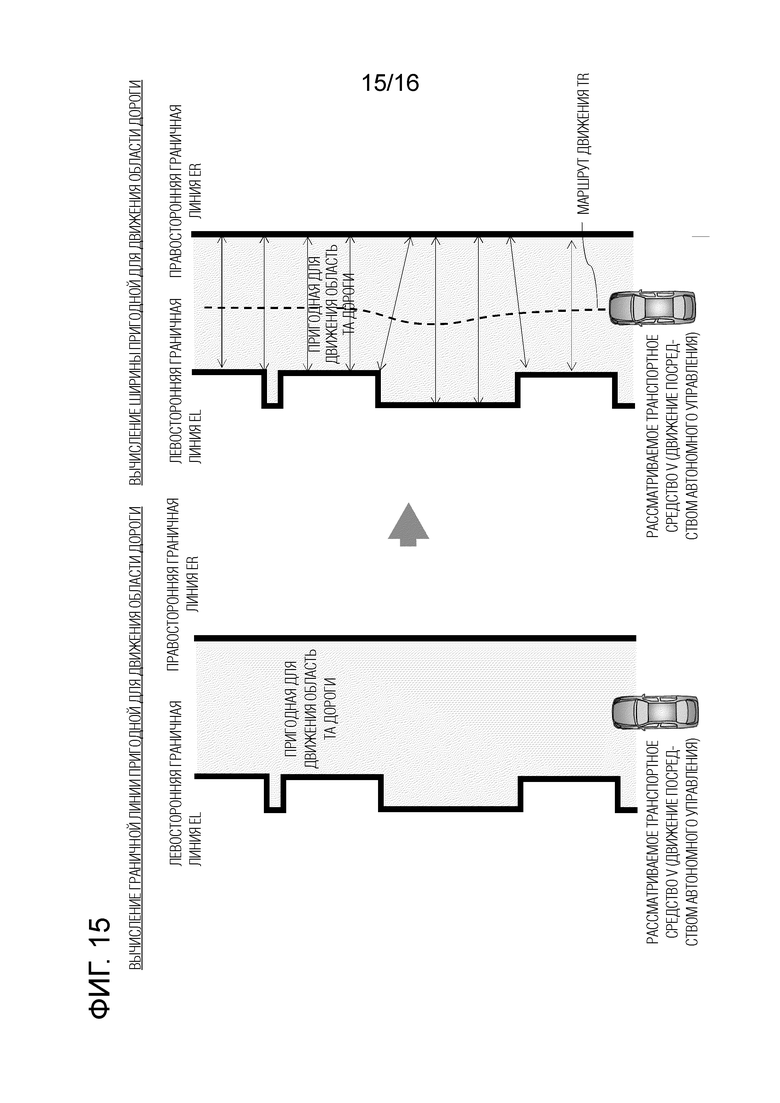
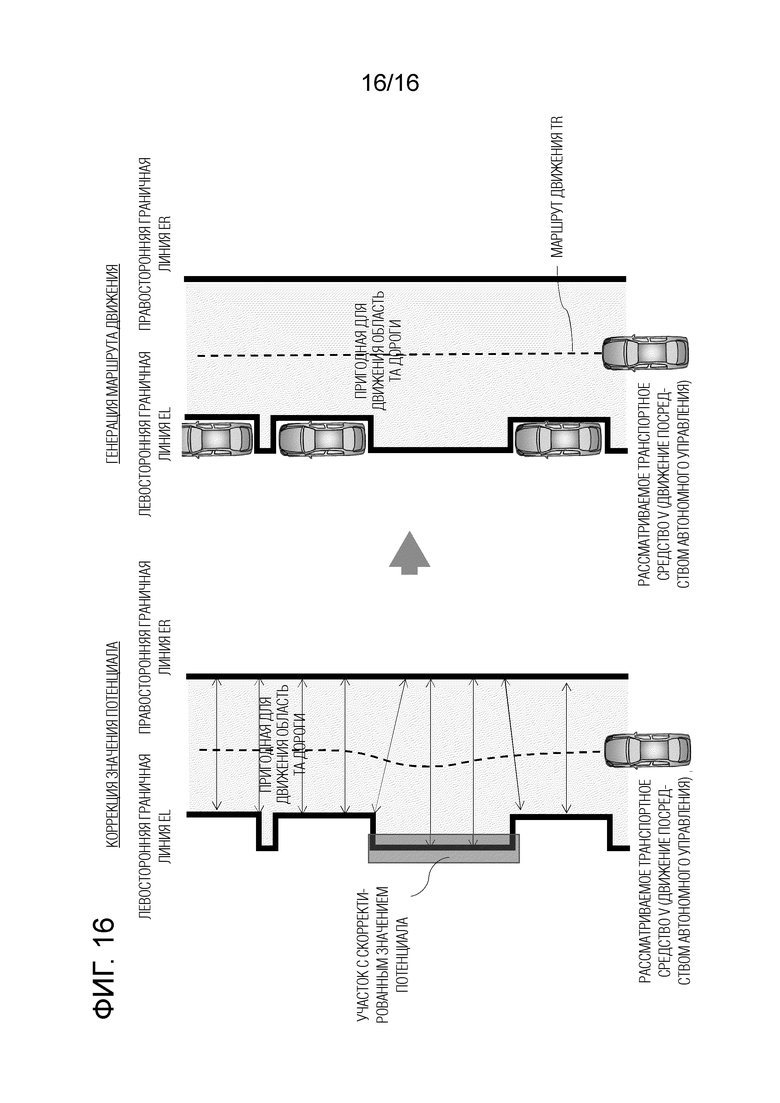
Изобретение относится к способу управления движением. Способ управления движением для транспортного средства содержит этапы, на которых получают информацию о левосторонней границе пригодной для движения области дороги и информацию о правосторонней границе пригодной для движения области дороги, генерируют поле потенциалов в пространстве пригодной для движения области дороги. Левостороннюю граничную линию информации о левосторонней границе пригодной для движения области дороги устанавливают на первое значение потенциала, а правостороннюю граничную линию информации о правосторонней границе пригодной для движения области дороги устанавливают на второе значение потенциала, отличное от первого значения потенциала в поле потенциалов, корректируют первое значение потенциала и/или второе значение потенциала так, чтобы абсолютное значение разности между поперечным положением маршрута движения и поперечным положением маршрута движения было равно заданному значению или меньше. При этом генерируют скорректированное поле потенциалов в пространстве пригодной для движения области дороги, генерируют маршрут движения и выполняют автономное управление движением рассматриваемого транспортного средства в соответствии со сгенерированным маршрутом движения. Достигается повышение плавности автономного управления движением. 2 н. и 9 з.п. ф-лы, 16 ил. 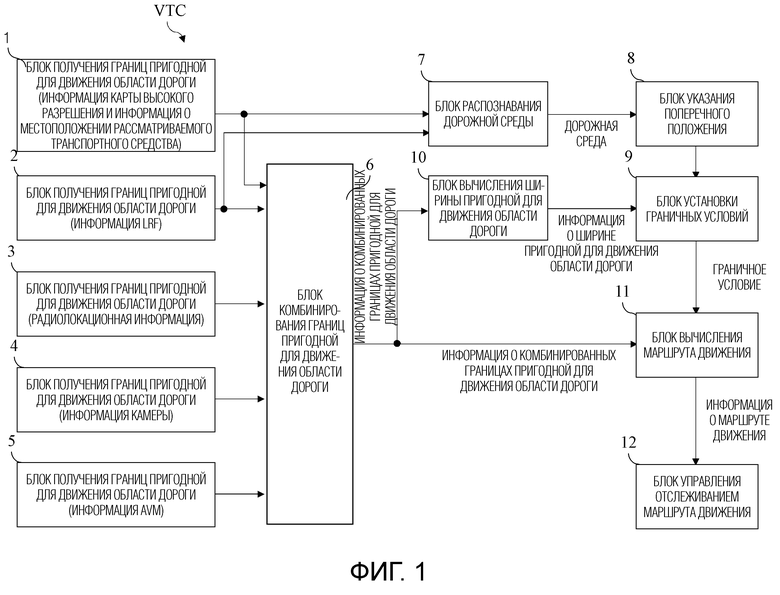
1. Способ управления движением для транспортного средства, содержащий этапы, на которых:
получают информацию о левосторонней границе пригодной для движения области дороги, относящуюся к левосторонней граничной линии пригодной для движения области дороги, в которой может двигаться рассматриваемое транспортное средство, и информацию о правосторонней границе пригодной для движения области дороги, относящуюся к правосторонней граничной линии пригодной для движения области дороги;
генерируют поле потенциалов в пространстве пригодной для движения области дороги, при этом левостороннюю граничную линию информации о левосторонней границе пригодной для движения области дороги устанавливают на первое значение потенциала, а правостороннюю граничную линию информации о правосторонней границе пригодной для движения области дороги устанавливают на второе значение потенциала, отличное от первого значения потенциала в поле потенциалов;
корректируют первое значение потенциала и/или второе значение потенциала так, чтобы абсолютное значение разности между поперечным положением маршрута движения, установленным заранее в пригодной для движения области дороги на основе левосторонней граничной линии или правосторонней граничной линии, и поперечным положением маршрута движения, установленным на основе значения потенциала в поле потенциалов, было равно заданному значению или меньше;
генерируют скорректированное поле потенциалов в пространстве пригодной для движения области дороги, при этом левостороннюю граничную линию информации о левосторонней границе пригодной для движения области дороги устанавливают на скорректированное первое значение потенциала, а правостороннюю граничную линию информации о правосторонней границе пригодной для движения области дороги устанавливают на скорректированное второе значение потенциала в скорректированном поле потенциалов;
генерируют маршрут движения, по которому движется рассматриваемое транспортное средство, на основе эквипотенциальных линий в сгенерированном скорректированном поле потенциалов; и
выполняют автономное управление движением рассматриваемого транспортного средства в соответствии со сгенерированным маршрутом движения.
2. Способ управления движением для транспортного средства по п. 1, в котором:
получение информации о левосторонней границе пригодной для движения области дороги и информации о правосторонней границе пригодной для движения области дороги включает в себя этапы, на которых:
обнаруживают информацию о первой границе пригодной для движения области дороги в горизонтальной плоскости области дороги, в которой может двигаться рассматриваемое транспортное средство, на основе информации о текущем местоположении рассматриваемого транспортного средства и картографической информации, в которой задана информация о границах дороги;
получают в качестве информации об окружении объект около рассматриваемого транспортного средства и дорожную ситуацию для обнаружения информации о второй границе пригодной для движения области дороги в горизонтальной плоскости области дороги, в которой может двигаться рассматриваемое транспортное средство, на основе информации об окружении;
комбинируют информацию о первой границе пригодной для движения области дороги и информацию о второй границе пригодной для движения области дороги для генерации информации о комбинированных границах пригодной для движения области дороги; и
разделяют информацию о комбинированных границах пригодной для движения области дороги на информацию о левосторонней границе пригодной для движения области дороги и информацию о правосторонней границе пригодной для движения области дороги.
3. Способ управления движением для транспортного средства по п. 1 или 2, в котором поперечное положение маршрута движения, установленное заранее в пригодной для движения области дороги, является одним из поперечного центрального положения пригодной для движения области дороги, положения, удаленного от правосторонней граничной линии пригодной для движения области дороги в левом направлении на первое заданное расстояние, и положения, удаленного от левосторонней граничной линии пригодной для движения области дороги в правом направлении на второе заданное расстояние.
4. Способ управления движением для транспортного средства по п. 3, содержащий этапы, на которых:
сохраняют заранее поперечные положения маршрута движения, причем поперечные положения связаны с информацией о дорожной среде, в которой движется рассматриваемое транспортное средство; и
получают информацию о дорожной среде, в которой движется рассматриваемое транспортное средство, для извлечения поперечного положения маршрута движения, связанного с информацией о дорожной среде, на основе сохраненного поперечного положения.
5. Способ управления движением для транспортного средства по п. 3, содержащий этапы, на которых:
вычисляют каждую частоту в направлении движения информации о левосторонней границе пригодной для движения области дороги и информации о правосторонней границе пригодной для движения области дороги; и
извлекают поперечное положение маршрута движения на основе упомянутой информации о границах пригодной для движения области дороги с меньшей частотой информации о левосторонней границе пригодной для движения области дороги и меньшей частотой информации о правосторонней границе пригодной для движения области дороги.
6. Способ управления движением для транспортного средства по пп. 1-5, в котором:
приближенное решение уравнения Лапласа используют для значения потенциала поля потенциалов.
7. Способ управления движением для транспортного средства по п. 6, в котором:
информацию о левосторонней границе пригодной для движения области дороги и информацию о правосторонней границе пригодной для движения области дороги преобразуют в информацию о последовательных прямых линиях, соответственно,
гармоническую функцию, заданную положением, направлением и длиной каждого линейного участка информации о последовательных прямых линиях используют в качестве базисной функции, и
приближенное решение линейных комбинаций информации о последовательных прямых линиях используют для значения потенциала поля потенциалов.
8. Способ управления движением для транспортного средства по п. 7, в котором:
упомянутую информацию о границах пригодной для движения области дороги преобразуют в информацию комплексного числа с целевой горизонтальной плоскостью в качестве комплексной плоскости,
базисную функцию используют как комплексную регулярную аналитическую функцию, и комплексный потенциал в качестве приближенного решения линейных комбинаций используют для значения потенциала поля потенциалов.
9. Способ управления движением для транспортного средства по п. 8, в котором:
когда z является комплексной переменной, базисная функция представляет собой
f(z) = ln(z1-z)+ln{(z1-z)/(z0-z)}(z0-z)/(z1-z0).
10. Способ управления движением для транспортного средства по п. 7, в котором:
среднюю точку каждого линейного участка информации о последовательных прямых линиях выбирают в качестве местоположения применения условий Дирихле, а коэффициент линейных комбинаций получают путем применения метода замещающего заряда.
11. Устройство управления движением для транспортного средства, причем устройство управления движением генерирует маршрут движения рассматриваемого транспортного средства и управляет любым из рулевого устройства, приводного устройства и тормозного устройства в соответствии с маршрутом движения для выполнения автономного управления движением,
выполненное с возможностью:
получения информации о левосторонней границе пригодной для движения области дороги, относящейся к левосторонней граничной линии пригодной для движения области дороги, в которой может двигаться рассматриваемое транспортное средство, и информации о правосторонней границе пригодной для движения области дороги, относящейся к правосторонней граничной линии пригодной для движения области дороги;
генерации поля потенциалов в пространстве пригодной для движения области дороги, при этом левосторонняя граничная линия информации о левосторонней границе пригодной для движения области дороги устанавливается на первое значение потенциала, а правосторонняя граничная линия информации о правосторонней границе пригодной для движения области дороги устанавливается на второе значение потенциала, отличное от первого значения потенциала в поле потенциалов;
коррекции первого значения потенциала и/или второго значения потенциала так, чтобы абсолютное значение разности между поперечным положением маршрута движения, установленным заранее в пригодной для движения области дороги на основе левосторонней граничной линии или правосторонней граничной линии, и поперечным положением маршрута движения, установленным на основе значения потенциала в поле потенциалов, было равно заданному значению или меньше;
генерации скорректированного поля потенциалов в пространстве пригодной для движения области дороги, при этом левосторонняя граничная линия информации о левосторонней границе пригодной для движения области дороги устанавливается на скорректированное первое значение потенциала, а правосторонняя граничная линия информации о правосторонней границе пригодной для движения области дороги устанавливается на скорректированное второе значение потенциала в скорректированном поле потенциалов;
генерации маршрута движения, по которому движется рассматриваемое транспортное средство, на основе эквипотенциальных линий в сгенерированном скорректированном поле потенциалов; и
выполнения автономного управления движением рассматриваемого транспортного средства в соответствии со сгенерированным маршрутом движения.
| JP 6396645 B2, 26.09.2018 | |||
| US 9542846 B2, 10.01.2017 | |||
| СПОСОБ ОБЕСПЕЧЕНИЯ КУРСОВОЙ УСТОЙЧИВОСТИ И БЕЗОПАСНОСТИ АВТОМОБИЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2660977C2 |
| СИСТЕМА И СПОСОБ КОНТРОЛЯ ПОЛОСЫ ДВИЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2014 |
|
RU2572939C9 |

