Изобретение относится к области космонавтики, а именно к технике выполнения траекторных измерений и определения параметров орбиты искусственного спутника Земли (ИСЗ), и может быть использовано на наземных и бортовых комплексах управления полетом ИСЗ для точного определения текущих параметров движения ИСЗ.
Известен способ определения координат навигационных ИСЗ [1], заключающийся в том, что:
выбирают группу из четырех навигационных ИСЗ, находящихся в зоне прямой видимости, состоящей из первой пары навигационных ИСЗ, находящихся на одной орбите, и второй пары навигационных ИСЗ, находящихся на другой орбите;
одновременно измеряют линейные межспутниковые расстояния между всеми четырьмя навигационными ИСЗ группы;
передают измеренные значения линейных расстояний от каждого ИСЗ группы к каждому;
вычисляют на каждом навигационном ИСЗ сферические расстояния между ним и координаты точки пересечения орбит выбранных навигационных ИСЗ;
определяют значения координат навигационных ИСЗ на основе значений сферических расстояний между ними и координат точки пересечения орбит.
К недостаткам способа определения координат навигационных ИСЗ [1] относят:
длительное время определения координат навигационных ИСЗ, связанное с необходимостью циркуляции информации между соседними ИСЗ;
высокую стоимость устройства, реализующего способ, обусловленную необходимостью размещения на борту навигационных ИСЗ дополнительных передатчиков, приемников, а также аппаратуры обработки информации.
Известен способ определения параметров орбиты геостационарного ИСЗ [2], заключающийся в том, что:
размещают приемо-излучающую наземную радиотехническую станцию (НРТС) на позиции с известными координатами с известными координатами;
выбирают начальные (априорные) значения параметров орбиты геостационарного ИСЗ;
измеряют наклонную дальность от НРТС до геостационарного ИСЗ;
многократно, в течении мерного интервала, составляющего не менее двух суток, измеряют наклонную дальность от НРТС до геостационарного ИСЗ с интервалом 2…3 часа;
делят полученную совокупность измерений на две части: обучаемую и контрольную;
делят определяемые параметры орбиты ИСЗ на две группы: внутриплоскостные и внеплоскостные;
производят серию оценок внутриплоскостных параметров орбиты ИСЗ при различных фиксированных значениях внеплоскостных параметров;
выбирают параметры орбиты геостационарного ИСЗ на основе серии произведенных оценок.
Недостатком способа определения параметров орбиты геостационарного ИСЗ [2] является большая продолжительность мерного интервала проведения измерений дальностей, которая должна составлять не менее двух последовательных суток.
Из известных способов наиболее близким аналогом (прототипом) предлагаемого способа по технической сущности является способ определения параметров орбиты искусственного спутника Земли [3]. Для реализации данного способа последовательно выполняют следующие этапы:
излучают тестовые радиосигналы НРТС на средней частоте f0 и N ИОРС на средних частотах fn, в момент времени t0;
принимают тестовые радиосигналов после их ретрансляции ИЗС с помощью НРТС в моменты времени  и
и  на средних частотах
на средних частотах  и
и  соответственно;
соответственно;
измеряют наклонные дальности от ИСЗ до НРСТ RSK и до каждой из N ИОРС 
вычисляют координаты ИСЗ х0, у0, z0 по известным координатам НРСТ, известным координатам N ИОРС и измеренным наклонным дальностям RSК, и 
вычисляют ортогональные составляющие вектора скорости ИСЗ  по известным координатам НРСТ, известным координатам N ИОРС, вычисленным координатам ИСЗ x0, у0, z0, запомненным номиналам средних частот переданных f0, fn и принятых
по известным координатам НРСТ, известным координатам N ИОРС, вычисленным координатам ИСЗ x0, у0, z0, запомненным номиналам средних частот переданных f0, fn и принятых  тестовых радиосигналов, предварительно заданной частоте сдвига fG рабочей частоты ИСЗ;
тестовых радиосигналов, предварительно заданной частоте сдвига fG рабочей частоты ИСЗ;
в качестве параметров орбиты ИСЗ принимают совокупность координат ИСЗ х0, у0, z0 и ортогональных составляющих вектора его скорости  в момент времени t0.
в момент времени t0.
Недостатками способа прототипа [3] являются относительно-невысокая точность определения параметров орбиты ИСЗ.
Целью изобретения является повышение точности определения параметров орбиты ИСЗ.
Поставленная цель достигается тем, что в известном способе определения параметров орбиты ИСЗ включающим: размещение НРТС на позиции с известными координатами хK, yK, zK, установку на земной поверхности М≥2 опорных реперных станций (ОРС) на позициях с известными координатами xIm, yIm, zlm, где m = 1…М - номер ОРС, выбор начальных значений параметров орбиты ИСЗ, однократное излучение в момент времени t0 тестовых радиосигналов НРСТ на средней частоте f0 и М ОРС на средних частотах fm соответственно, прием в НРТС тестового радиосигнала, переданного НРТС и ретранслированного ИСЗ, вычисление задержки во времени  и частотного сдвига
и частотного сдвига  между переданным и принятым тестовым радиосигналом НРТС, измерение наклонной дальности от ИСЗ до НРСТ RSK на основе временной задержки
между переданным и принятым тестовым радиосигналом НРТС, измерение наклонной дальности от ИСЗ до НРСТ RSK на основе временной задержки  измерение наклонных дальности от ИСЗ до каждой из М ОРС
измерение наклонных дальности от ИСЗ до каждой из М ОРС  вычисление координат ИСЗ х0, у0, z0 по известным координатам НРСТ, и М ОРС и измеренным наклонным дальностям RSK и
вычисление координат ИСЗ х0, у0, z0 по известным координатам НРСТ, и М ОРС и измеренным наклонным дальностям RSK и  вычисление ортогональных составляющих вектора скорости ИСЗ
вычисление ортогональных составляющих вектора скорости ИСЗ  по известным координатам НРСТ и М ОРС, вычисленным координатам ИСЗ, номиналам средних частот переданных тестовых радиосигналов НРСТ f0 и М ОРС fm, частотному сдвигу Δf0 и предварительно заданной частоте сдвига fG рабочей частоты ИСЗ, принятие в качестве параметров орбиты ИСЗ совокупности координат ИСЗ х0, у0, z0, и ортогональных составляющих вектора его скорости
по известным координатам НРСТ и М ОРС, вычисленным координатам ИСЗ, номиналам средних частот переданных тестовых радиосигналов НРСТ f0 и М ОРС fm, частотному сдвигу Δf0 и предварительно заданной частоте сдвига fG рабочей частоты ИСЗ, принятие в качестве параметров орбиты ИСЗ совокупности координат ИСЗ х0, у0, z0, и ортогональных составляющих вектора его скорости  в момент времени t0, в качестве ОРС используют приемо-передающие опорные реперные станции (ППОРС).
в момент времени t0, в качестве ОРС используют приемо-передающие опорные реперные станции (ППОРС).
Для измерения наклонных дальностей от ИСЗ до М ППОРС  и радиальных скоростей ИСЗ относительно ППОРС
и радиальных скоростей ИСЗ относительно ППОРС  дополнительно принимают каждой из М ППОРС свои же тестовые радиосигналы, ретранслированные ИСЗ.
дополнительно принимают каждой из М ППОРС свои же тестовые радиосигналы, ретранслированные ИСЗ.
Вычисляют в каждой из М ППОРС с помощью корреляционной обработки радиосигналов значения взаимных временных задержек Δtm и частотных сдвигов Δfm между переданными и принятыми тестовыми радиосигналами.
Измеряют в каждой из М ППОРС значения наклонных дальностей от ИСЗ до М ППОРС  на основе взаимных временных задержек
на основе взаимных временных задержек  а также значения радиальных скоростей ИСЗ относительно каждой из М ППОРС
а также значения радиальных скоростей ИСЗ относительно каждой из М ППОРС  на основе частотных сдвигов Δfm.
на основе частотных сдвигов Δfm.
Измеряют в НРСТ значение радиальной скорости ИСЗ относительно НРСТ  на основе частотного сдвига
на основе частотного сдвига 
Передают от каждой из М ППОРС на НРСТ значения  и
и 
В НРСТ вычисляют координаты ИСЗ x0, у0, z0 по известным координатам НРСТ и М ППОРС и измеренным наклонным дальностям RSК и 
Вычисляют ортогональные составляющие вектора скорости ИСЗ  по известным координатам НРСТ и М ППОРС, вычисленным координатам ИСЗ, измеренным радиальным скоростям
по известным координатам НРСТ и М ППОРС, вычисленным координатам ИСЗ, измеренным радиальным скоростям  и
и 
В качестве параметров орбиты ИСЗ принимают совокупность координат ИСЗ х0, у0, и z0 ортогональных составляющих вектора его скорости  в момент времени t0.
в момент времени t0.
Благодаря перечисленной новой совокупности существенных признаков, за счет использования НРТС в приемо-передающим режиме, размещенной на позиции с известными координатами хK, уK, zK и М≥2 приемо-передающих опорных реперных станции (ППОРС) на позициях с известными координатами xIm, yIm, zIm, где m=1…М - номер ППОРС достигается цель изобретения: повышение точности определения параметров орбиты ИСЗ.
Заявленный способ поясняется чертежами, на которых показаны:
на фиг. 1 - система трех возмущающих тел: Земли, Солнца и Луны,
на фиг. 2 - схема алгоритма прогноза координат ИСЗ,
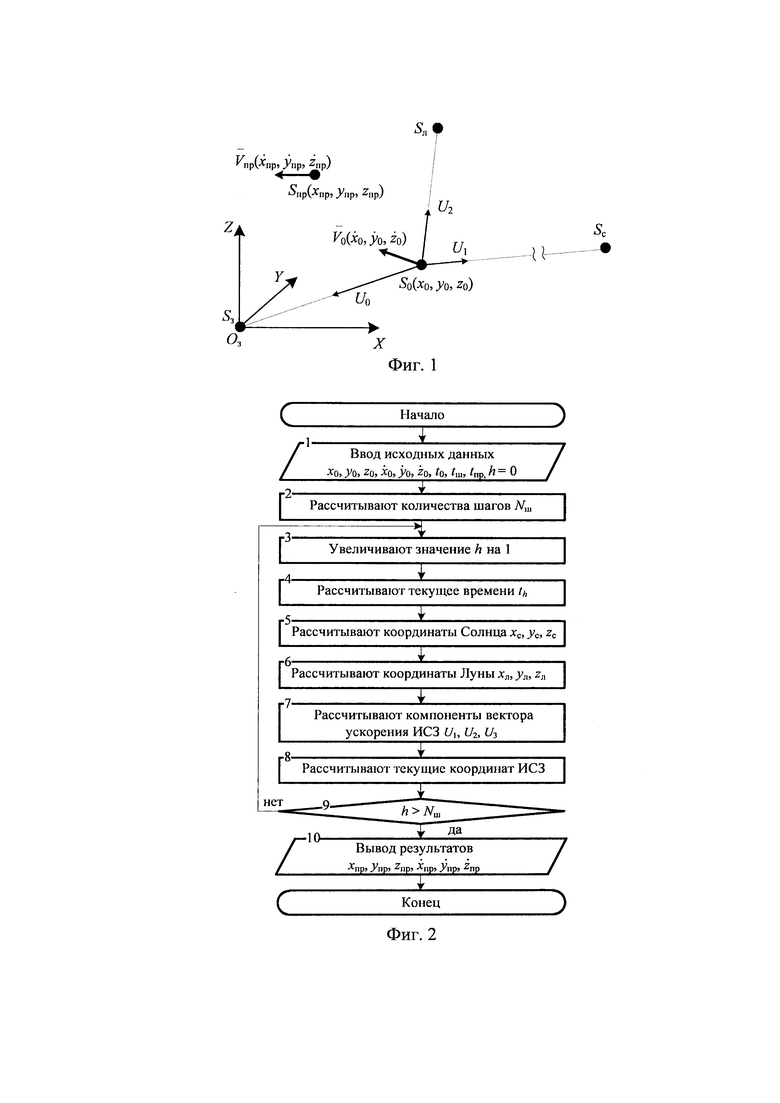
на фиг. 3 - структурная схема подсистемы определения координат ИСЗ,
на фиг. 4 - схема алгоритма расчета координат ИСЗ,
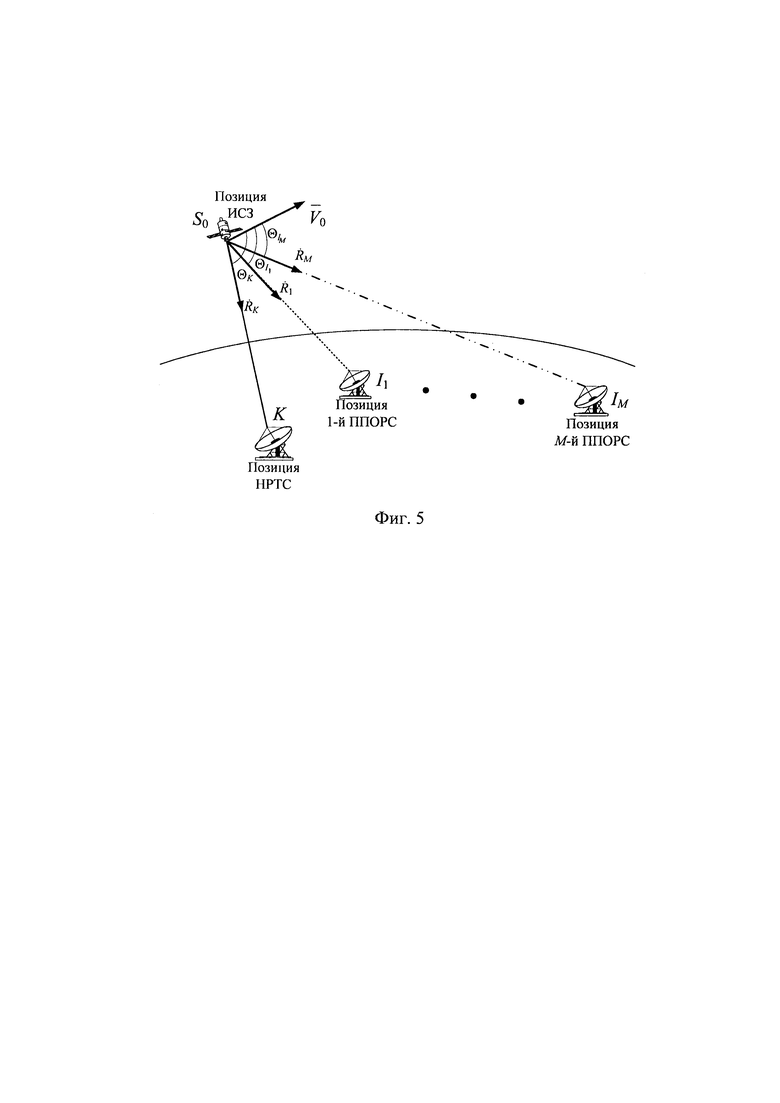
на фиг. 5 - структурная схема подсистемы определения ортогональных составляющих вектора скорости ИСЗ.
Теория полета ИСЗ, или, как ее еще называют, астродинамика, небесная механика, космическая баллистика, основана на законах И. Кеплера и законе всемирного тяготения И. Ньютона.
В первом приближении движение ИСЗ представляется как невозмущенное - такое движение, которое происходило бы только под влиянием силы притяжения Земли по закону Ньютона, т.е. точно соответствует задаче двух тел (Земля - ИСЗ) в небесной механике. Это движение называется движением по Кеплеровой орбите, так как подчиняется трем законам Кеплера [4].
Достоинством Кеплеровой орбиты является простота вычисления координат и вектора скорости ИСЗ в прогнозируемый момент времени. Это предопределило широкое использование элементов Кеплеровой орбиты. В настоящем изобретении элементы Кеплеровой орбиты ИСЗ выступают в качестве априорных данных об ИСЗ. С помощью этих элементов ориентируют приемные антенны НРСТ и М ППОРС на ИСЗ, Кроме того элементы Кеплеровой орбиты ИСЗ служат для устранения двузначности определения координат ИСЗ.
Недостатком Кеплеровой орбиты является относительно низкая точность определения координат и вектора скорости ИСЗ, которая недостаточна для выполнения ряда прикладных задач, например, для корректировки движения ИСЗ.
Более точно движение ИСЗ описывается с помощью возмущенной орбиты [4, 5], которая задается:
каноническими параметрами ИСЗ, включающими координаты ИСЗ x0, y0, z0 и ортогональные составляющие вектора его скорости  в начальный момент времени t0,
в начальный момент времени t0,
факторами, приводящими к отклонениям ИСЗ от идеальной (Кеплеровой) орбиты и называемыми возмущающими факторами.
Например, для геостационарного ИСЗ достаточно учитывать только три фактора, приводящих к отклонениям ИСЗ от идеальной (Кеплеровой) орбиты, - влияние Солнца, Луны и нецентральности гравитационного поля Земли. Схема трех возмущающих тел: Земли Sз, Солнца Sc и Луны Sл отображена на фиг. 1. Точками S0 (х0, у0, z0) и Sпр (хпр, упр, znp) показаны координаты, а стрелками  и
и  - векторы скоростей ИСЗ в начальный момент времени t0 и в прогнозируемый момент времени tпр соответственно в геоцентрической декартовой системе координат OзXYZ.
- векторы скоростей ИСЗ в начальный момент времени t0 и в прогнозируемый момент времени tпр соответственно в геоцентрической декартовой системе координат OзXYZ.
В качестве примера в приложении А представлен алгоритм прогноза координат геостационарного ИСЗ, при этом процедуры расчета координат Солнца и Луны вынесены в приложение Б.
Прогноз канонических параметров ИСЗ хпр, упр, zпр,  в нужный (прогнозируемый) момент времени tпр осуществляют на основе исходных данных x0, y0, z0, в момент t0 и рассчитанных силовых функций (ускорений) U1, U2, U3, действующих на ИСЗ со стороны Земли, Солнца и Луны соответственно на основе решения системы дифференциальных уравнений (А.2).
в нужный (прогнозируемый) момент времени tпр осуществляют на основе исходных данных x0, y0, z0, в момент t0 и рассчитанных силовых функций (ускорений) U1, U2, U3, действующих на ИСЗ со стороны Земли, Солнца и Луны соответственно на основе решения системы дифференциальных уравнений (А.2).
Прогноз координат других (не геостационарных) ИСЗ проводят на основе алгоритма аналогичного рассмотренному, с той лишь разницей, что учитывают больше факторов, приводящих к отклонениям ИСЗ от идеальной (Кеплеровой) орбиты. В качестве таких факторов, например, для ИСЗ на низких орбитах выступают: влияние сопротивления атмосферы Земли, светового давления, притяжения планет.
Система определения канонических параметров ИСЗ S0 содержит одну НРТС K и М≥2 ППОРС Im, m=1…М (см. фиг. 3) на позициях с известными координатами, принимающие радиосигналы ИСЗ [6].
Для обеспечения синхронности работы приемников НРТС и М ПОРС используют метки времени высокостабильного генератора частот.
Для определения координат ИСЗ х0, у0, z0 в момент времени t0 используют временные задержки между передачей и приемом тестовых радиосигналов НРТС и М ППОРС. Для получения таких задержек предварительно излучают в момент времени t0 тестовые радиосигналы НРСТ и М ППОРС. Далее принимают в НРТС и М ППОРС свои же тестовые радиосигналы ретранслированные ИСЗ. Вычисляют в НРСТ и в каждой из М ППОРС с помощью корреляционной обработки радиосигналов значения взаимных временных задержек Δt0, Δtm между переданными и принятыми тестовыми радиосигналами [7].
На основе полученных задержек во времени Δt0, Δtm рассчитывают дальности RSK и  от НРТС и m-й ППОРС до ИСЗ:
от НРТС и m-й ППОРС до ИСЗ:


где с - 3×108 м/с - скорость света в вакууме.
Полученные дальности RSK и RSIm являются координатно-информативными параметрами ИСЗ, а поверхностями положения ИСЗ будут сферы, центры которых совпадают с известными координатами НРТС и соответствующей m-й ППОРС.
Координаты точки пересечения полученных сфер соответствуют искомым координатам ИСЗ х0, у0, z0 в момент времени t0.
Для одномоментного определения координат ИСЗ необходимо наличие трех сфер а, следовательно, НРТС K и 2-х ППОРС I1 и I2. Дальнейшее увеличение количества ППОРС будет приводить к повышению точности определения координат ИСЗ и сопутствующим увеличением суммарной стоимости устройства, реализующего способ. Двузначность определения координат ИСЗ, обусловленная тем, что три сферы в общем случае пересекаются в двух точках, устраняется априорными данными о координатах ИСЗ, в качестве которых выступают известные элементы Кеплеровой орбиты ИСЗ.
Для определения координат ИСЗ возможно использование и одной ППОРС. Однако, в таком случае время, необходимое для определения координат ИСЗ будет значительно возрастать.
В качестве примера в приложении В представлена аналитическая интерпретация алгоритма построения трех поверхностей положения в виде сфер, а также нахождения точки пересечения таких поверхностей. В качестве выходных результатов представленного алгоритма выступают координат ИСЗ х0, у0, и z0 в момент времени t0.
Для определения ортогональных составляющих вектора скорости ИСЗ  в момент времени t0 используют частотные Δf0 и Δfm сдвиги между переданными в направлении на ИСЗ и принятыми от ИСЗ тестовыми радиосигналами НРТС и М ППОРС.
в момент времени t0 используют частотные Δf0 и Δfm сдвиги между переданными в направлении на ИСЗ и принятыми от ИСЗ тестовыми радиосигналами НРТС и М ППОРС.
Для одномоментного и однозначного определения ортогональных составляющих вектора скорости ИСЗ необходимо использование НРТС и двух ППОРС. Дальнейшее увеличение количества ППОРС будет приводить к повышению точности определения ортогональных составляющих вектора скорости ИСЗ, но с сопутствующим увеличением суммарной стоимости устройства, реализующего способ.
Для определения ортогональных составляющих вектора скорости ИСЗ возможно использование и одной ППОРС. Однако, в таком случае время, необходимое для определения ортогональных составляющих вектора скорости ИСЗ неизбежно будет существенно возрастать.
В качестве примера в приложении Г представлена аналитическая интерпретация алгоритма определения ортогональных составляющих вектора скорости ИСЗ на основе частотных сдвигов между переданными в направлении на ИСЗ и принятыми от ИСЗ радиосигналами НРТС и М ППОРС для частного случая, когда М = 2.
Окончательно, в качестве параметров орбиты ИСЗ принимают координаты ИСЗ х0, у0, z0 и ортогональные составляющие вектора его скорости 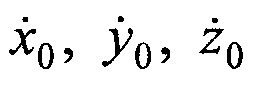 в момент времени t0.
в момент времени t0.
Имитационное моделирование [8, 9] заявленного способа показывает возможность повышения точности определения параметров орбиты ИСЗ по сравнению со способом прототипом на 10…20%.
Источники информации
1. Каменский В.В., Кучеренко П.А., Соколов С.В., Акперов А.И., Крамаров CO., Лукасевич В.И. Способ определения координат навигационных спутников Патент на изобретение №2615634, опубл. 06.04.2017 Бюл. №10.
2. Урличич Ю.М., Балуевский Ю.Н., Ганженко В.П., Ежов С.А., Жодзишский А.И., Измайлов Ю.Д., Круглов А.В., Махненко Ю.Ю., Поповкин В.А. Способ определения параметров орбиты геостационарного спутника Патент RU №2313104, опубл. 20.12.2007 Бюл. №8.
3. Балабанов В.В., Беспалов В.Л., Кельян А.Х., Пономарев А.А., Севидов В.В., Чемаров А.О. Способ определения параметров орбиты искусственного спутника Земли. Патент на изобретение №2652603, опубл. 27.04.2018 Бюл. №12.
4. Машбиц Л.М. Компьютерная картография и зоны спутниковой связи, - 2-е изд., перераб и доп.- М.: Горячая линия - Телеком, 2009. - 236 с.
5. Волков Р.В., Малышев СР., Симонов А.Н., Севидов В.В. Определение канонических параметров спутников-ретрансляторов по радиосигналам опорных реперных станций // Труды Военно-космической академии им. А.Ф. Можайского. 2016. Вып. 655. С. 88-92.
6. Богдановский С.В., Волков Р.В., Севидов В.В., Теслевич С.Ф. Модель поверхности Земли при определении местоположения земной станции по сигналам спутников-ретрансляторов // Наукоемкие технологии. 2016. №12. С. 44-50.
7. Волков Р.В., Саяпин В.Н., Севидов В.В. Модель измерения временной задержки и частотного сдвига радиосигнала, принятого от спутника-ретранслятора при определении местоположения земной станции // T-Comm: Телекоммуникации и транспорт. 2016. Том 10. №9. С. 14-18.
8. Волков Р.В., Саяпин В.Н., Севидов В.В. Модель движения искусственного спутника Земли // Программы для ЭВМ. Базы данных. Топологии интегральных микросхем. 2016. №2. С. 112.
9. Севидов В.В. Определение координат и параметров движения источника радиоизлучения на основе разностно-временных и разностно-доплеровских измерений // Программы для ЭВМ. Базы данных. Топологии интегральных микросхем. 2015. №11. С. 2.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ОРБИТЫ ИСКУССТВЕННОГО СПУТНИКА ЗЕМЛИ | 2017 |
|
RU2652603C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ОРБИТЫ ИСКУССТВЕННОГО СПУТНИКА ЗЕМЛИ С ИСПОЛЬЗОВАНИЕМ ПРИЕМНЫХ ОПОРНЫХ РЕПЕРНЫХ СТАНЦИЙ | 2018 |
|
RU2702098C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОРТОГОНАЛЬНЫХ СОСТАВЛЯЮЩИХ ВЕКТОРА СКОРОСТИ И СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ КОСМИЧЕСКОГО АППАРАТА С ИСПОЛЬЗОВАНИЕМ ЗЕМНЫХ СТАНЦИЙ | 2020 |
|
RU2750228C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОРТОГОНАЛЬНЫХ СОСТАВЛЯЮЩИХ ВЕКТОРОВ СКОРОСТЕЙ И СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ДВУХ КОСМИЧЕСКИХ АППАРАТОВ С ИСПОЛЬЗОВАНИЕМ ЗЕМНЫХ СТАНЦИЙ | 2020 |
|
RU2749878C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОРТОГОНАЛЬНЫХ СОСТАВЛЯЮЩИХ ВЕКТОРА СКОРОСТИ И СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ КОСМИЧЕСКОГО АППАРАТА С ИСПОЛЬЗОВАНИЕМ ЗЕМНЫХ СТАНЦИЙ | 2020 |
|
RU2750753C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОРТОГОНАЛЬНЫХ СОСТАВЛЯЮЩИХ ВЕКТОРОВ СКОРОСТЕЙ И СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ДВУХ КОСМИЧЕСКИХ АППАРАТОВ С ИСПОЛЬЗОВАНИЕМ ЗЕМНЫХ СТАНЦИЙ | 2020 |
|
RU2750983C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ КОСМИЧЕСКОГО АППАРАТА С ИСПОЛЬЗОВАНИЕМ ЗЕМНЫХ СТАНЦИЙ И ИЗЛУЧАЮЩЕЙ ОПОРНОЙ РЕПЕРНОЙ СТАНЦИИ | 2023 |
|
RU2805667C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ДВУХ КОСМИЧЕСКИХ АППАРАТОВ С ИСПОЛЬЗОВАНИЕМ ЗЕМНЫХ СТАНЦИЙ И ИЗЛУЧАЮЩЕЙ ОПОРНОЙ РЕПЕРНОЙ СТАНЦИИ | 2022 |
|
RU2787890C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОРТОГОНАЛЬНЫХ СОСТАВЛЯЮЩИХ ВЕКТОРОВ СКОРОСТИ ДВУХ КОСМИЧЕСКИХ АППАРАТОВ С ИСПОЛЬЗОВАНИЕМ ЗЕМНЫХ СТАНЦИЙ И ИЗЛУЧАЮЩЕЙ ОПОРНОЙ РЕПЕРНОЙ СТАНЦИИ | 2022 |
|
RU2791153C1 |
| Способ определения координат космического аппарата с использованием земных станций и излучающей опорной реперной станции | 2023 |
|
RU2803662C1 |
Изобретение относится к области космонавтики, а именно к технике выполнения траекторных измерений и определения параметров орбиты искусственного спутника Земли (ИСЗ), и может быть использовано на наземных и бортовых комплексах управления полетом ИСЗ для точного определения текущих параметров движения ИСЗ. Технический результат состоит в повышении точности определения параметров орбиты ИСЗ. Для этого используют наземную радиотехническую станцию (НРТС) в приемо-передающим режиме, размещенную на позиции с известными координатами приемо-передающих опорных реперных станций (ППОРС) на позициях с известными координатами. Способ основан на излучении тестовых радиосигналов НРТС и М ППОРС и последующего приема этих тестовых радиосигналов после ретрансляции ИЗС с помощью НРТС и МППОРС. В НРТС и каждой из М ППОРС измеряют наклонные дальности от ИСЗ до НРТС и М ППОРС, а также радиальные скорости ИСЗ относительно НРТС и М ППОРС. В качестве параметров орбиты ИСЗ принимают совокупность координат ИСЗ и ортогональных составляющих вектора его скорости в момент времени t0, вычисленных в НРТС на основе измеренных дальностей, а также радиальных скоростей. 5 ил. 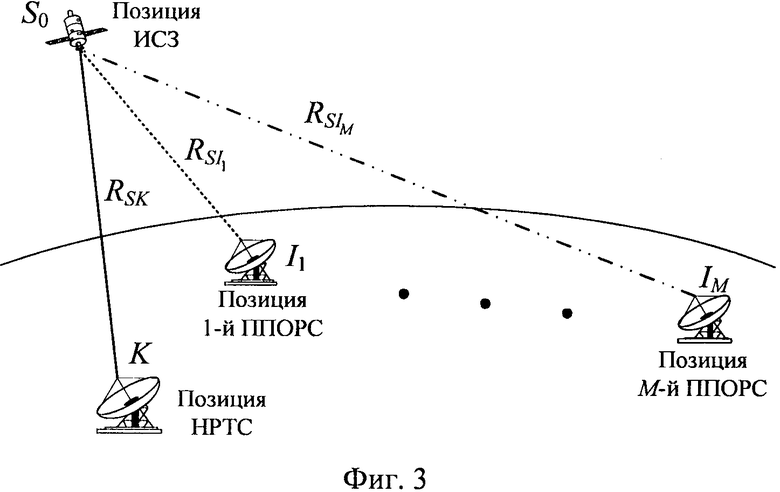
1. Способ определения параметров орбиты искусственного спутника Земли (ИСЗ) с использованием приемо-передающих опорных реперных станций (ППОРС), заключающийся в том, что размещают приемо-передающую наземную радиотехническую станцию (НРТС) на позиции с известными координатами xK, yK, zK, устанавливают на земной поверхности М≥2 опорных реперных станций (ОРС) на позициях с известными координатами хIm, уIm, zIm, где m=1…М - номер ОРС, выбирают начальные значения параметров орбиты ИСЗ, однократно излучают в момент времени t0 тестовые радиосигналы НРСТ на средней частоте ƒ0 и М ОРС на средних частотах ƒm соответственно, принимают в НРТС тестовый радиосигнал, переданный НРТС и ретранслированный ИСЗ, вычисляют задержку во времени Δt0 и частотный сдвиг Δƒ0 между переданным и принятым тестовым радиосигналом НРТС, измеряют наклонную дальность от ИСЗ до НРСТ RSK на основе временной задержки Δt0, измеряют наклонные дальности от ИСЗ до каждой из М ОРС  , вычисляют координаты ИСЗ х0, у0, z0 по известным координатам НРСТ, и М ОРС и измеренным наклонным дальностям RSK и , вычисляют ортогональные составляющие вектора скорости ИСЗ
, вычисляют координаты ИСЗ х0, у0, z0 по известным координатам НРСТ, и М ОРС и измеренным наклонным дальностям RSK и , вычисляют ортогональные составляющие вектора скорости ИСЗ  ,
,  ,
,  по известным координатам НРСТ и М ОРС, вычисленным координатам ИСЗ, номиналам средних частот переданных тестовых радиосигналов НРСТ ƒ0 и М ОРС ƒm, частотному сдвигу Δƒ0 и предварительно заданной частоте сдвига ƒG рабочей частоты ИСЗ, а в качестве параметров орбиты ИСЗ принимают совокупность координат ИСЗ х0, у0, z0 и ортогональных составляющих вектора его скорости , , в момент времени t0, отличающийся тем, что в качестве ОРС используют ППОРС, а для измерения наклонных дальностей от ИСЗ до М ППОРС и радиальных скоростей ИСЗ относительно ППОРС
по известным координатам НРСТ и М ОРС, вычисленным координатам ИСЗ, номиналам средних частот переданных тестовых радиосигналов НРСТ ƒ0 и М ОРС ƒm, частотному сдвигу Δƒ0 и предварительно заданной частоте сдвига ƒG рабочей частоты ИСЗ, а в качестве параметров орбиты ИСЗ принимают совокупность координат ИСЗ х0, у0, z0 и ортогональных составляющих вектора его скорости , , в момент времени t0, отличающийся тем, что в качестве ОРС используют ППОРС, а для измерения наклонных дальностей от ИСЗ до М ППОРС и радиальных скоростей ИСЗ относительно ППОРС  , дополнительно принимают каждой из М ППОРС свои же тестовые радиосигналы, ретранслированные ИСЗ, вычисляют в каждой из М ППОРС с помощью корреляционной обработки радиосигналов значения взаимных временных задержек Δtm и частотных сдвигов Δƒm между переданными и принятыми тестовыми радиосигналами, измеряют в каждой из М ППОРС значения наклонных дальностей от ИСЗ до М ППОРС на основе взаимных временных задержек Δtm, а также значения радиальных скоростей ИСЗ относительно каждой из М ППОРС
, дополнительно принимают каждой из М ППОРС свои же тестовые радиосигналы, ретранслированные ИСЗ, вычисляют в каждой из М ППОРС с помощью корреляционной обработки радиосигналов значения взаимных временных задержек Δtm и частотных сдвигов Δƒm между переданными и принятыми тестовыми радиосигналами, измеряют в каждой из М ППОРС значения наклонных дальностей от ИСЗ до М ППОРС на основе взаимных временных задержек Δtm, а также значения радиальных скоростей ИСЗ относительно каждой из М ППОРС  на основе частотных сдвигов Δƒm, измеряют в НРСТ значение радиальной скорости ИСЗ относительно НРСТ
на основе частотных сдвигов Δƒm, измеряют в НРСТ значение радиальной скорости ИСЗ относительно НРСТ  на основе частотного сдвига Δƒ0, передают от каждой из М ППОРС на НРСТ значения и
на основе частотного сдвига Δƒ0, передают от каждой из М ППОРС на НРСТ значения и  , в НРСТ вычисляют координаты ИСЗ х0, у0, z0 по известным координатам НРСТ и М ППОРС и измеренным наклонным дальностям RSK и , вычисляют ортогональные составляющие вектора скорости ИСЗ , , по известным координатам НРСТ и М ППОРС, вычисленным координатам ИСЗ, измеренным радиальным скоростям
, в НРСТ вычисляют координаты ИСЗ х0, у0, z0 по известным координатам НРСТ и М ППОРС и измеренным наклонным дальностям RSK и , вычисляют ортогональные составляющие вектора скорости ИСЗ , , по известным координатам НРСТ и М ППОРС, вычисленным координатам ИСЗ, измеренным радиальным скоростям  и , а в качестве параметров орбиты ИСЗ принимают совокупность координат ИСЗ х0, у0, z0 и ортогональных составляющих вектора его скорости
и , а в качестве параметров орбиты ИСЗ принимают совокупность координат ИСЗ х0, у0, z0 и ортогональных составляющих вектора его скорости  ,
,  ,
,  в момент времени t0.
в момент времени t0.
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ОРБИТЫ ИСКУССТВЕННОГО СПУТНИКА ЗЕМЛИ | 2017 |
|
RU2652603C1 |
| СИСТЕМА ОЦЕНИВАНИЯ ТОЧНОСТИ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ИСЗ | 2009 |
|
RU2391265C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ НЕИЗВЕСТНОГО ПЕРЕДАТЧИКА В СИСТЕМЕ СПУТНИКОВОЙ СВЯЗИ | 2003 |
|
RU2254589C2 |
| СИСТЕМА ГЛОБАЛЬНОГО АВТОМАТИЧЕСКОГО КОНТРОЛЯ ТРАНСПОРТНЫХ СРЕДСТВ ПРИ НОРМАЛЬНЫХ И ЭКСТРЕМАЛЬНЫХ УСЛОВИЯХ | 2000 |
|
RU2158003C1 |
| US 7535402 B1, 19.05.2009 | |||
| Магнитный импульсный генератор | 1971 |
|
SU450325A1 |
| US 5570096 A, 29.10.1996. | |||

