Изобретение относится к области слежения (контроля) за транспортными средствами (ТС) с помощью радиосредств, а более конкретно к использованию спутниковых систем для повышения безопасности движения ТС за счет регулярного автоматического контроля в реальном масштабе времени точных значений текущих координат траекторий движения ТС в воздухе, на суше и на море при нормальных условиях эксплуатации (режим "Мониторинг") и немедленного оповещения о точных значениях координат мест возникновения на них экстремальных ситуаций (аварий, катастроф, нападений и т. п.) (режим "Авария").
В настоящее время каждая из этих двух задач ("Мониторинг" и "Авария") решается независимо в рамках двух автономных спутниковых систем, каждая из которых содержит "свой" автономный аппаратный комплекс, включающий наряду с капитальным оборудование (ИСЗ, наземные пункты приема информации - ППИ), комплекты из многих десятков тысяч единиц бортового оборудования (автоматических радиомаяков - АРМ), размещаемого на каждом из воздушных, морских и речных судов, а также наземных ТС мирового парка.
Единственной действующей специализированной автономной спутниковой системой поиска мест аварий является международная система КОСПАС-САРСАТ, которая и была выбрана в качестве прототипа решения одного из аспектов общей задачи. Эта система предусматривает размещение на морских и воздушных судах аварийных радиомаяков (АРМ). После ручной или автоматической активации эти АРМ излучают на специально выделенной "космической" аварийной частоте 406,025 МГц сигналы бедствия. Для ретрансляции же этих сигналов на наземные ППИ используются шесть низкоорбитальных искусственных спутников земли (НО ИСЗ) (см. "Мобильная спутниковая связь", Л.М. Невдяев, М. МЦТИ, 1998 г., стр. 41-44) [1].
Однако время ожидания появления в зоне бедствия хотя бы одного из указанных НО ИСЗ может превышать 1,5 ч. Координаты места излучения АРМ с точностью до 3000 м. "вычисляет" бортовой процессор ИСЗ по доплеровскому сдвигу частоты, но на это дополнительно уходит еще 10-15 минут. Столь длительный поиск в какой то мере терпимый при бедствиях на суше или на море, в принципе исключает возможность использования этой системы для поиска мест скоротечных (5-50 с) авиакатастроф.
Не увенчались успехом попытки решить в рамках этой системы проблему таких катастроф за счет сохранения работоспособности АРМ после разрушения воздушного судна (ВС), например, с помощью:
- катапультирования АРМ перед катастрофой и мягкого его приземления на парашюте. Однако при этом точность и надежность определения места катастрофы резко снижаются, а стоимость АРМ значительно увеличивается;
- размещения на внешней обшивки корпуса ВС неотделяемого АРМ особо высокой прочности, выдерживающего удар ВС о землю (практически неразрешимая задача).
Второй важный аспект общей задачи - "Мониторинг" - в настоящее время частично обеспечивается (применительно к авиации) сетью радаров сопровождения, строительство и эксплуатация которых весьма дорогостоящи, а также сетью ретрансляционных радиостанций на суше и арендуемыми радиоканалами морской спутниковой системы ИНМАРСАТ-Е над океанами (см. [1] стр. 69). Это решение, за неимением других, взято в качестве прототипа для решения второго аспекта общей задачи. К недостаткам этого прототипа следует отнести значительные затраты на создание и эксплуатацию разветвленной наземной сети ретрансляционных радиостанций и высокие тарифы за пользование радиоканалами системы ИНМАРСАТ-Е, что делает этот способ не менее сложным и дорогостоящим, чем при применении системы следящих радаров. Кроме того, используемые в рамках ИНМАРСАТ-Е геостационарные (ГС) ИСЗ, расположенные на широте экватора, не обеспечивают уверенной связи с воздушными и морскими судами, находящимися в приполярной зоне (нет прямой видимости, а эффект огибания Земли на рабочей частоте этой системы - 1500 МГц - еще не проявляется).
Заявляемое изобретение направлено на комплексное решение задачи по автоматическому отслеживанию траектории движения и обнаружению места катастрофы ТС. Предлагаемое решение может применяться для всех видов ТС, однако, в связи с тем, что проблема наиболее трудно разрешаема в области авиации, будем рассматривать практическое решение именно в отношении ВС.
Применительно к быстротечным авиакатастрофам в основу изобретения положен принципиально новый подход, исключающий необходимость решать практически неразрешимую известными методами задачу сохранения АРМ после разрушения ВС. Изобретение предусматривает сохранение не АРМ после катастрофы ВС, а информации о точных значениях координат места падения ВС, которые АРМ успеет передать до разрушения ВС.
Изобретение предусматривает реализацию спутниковой системы мгновенного действия, время реагирования которой (до 0,5 с) на порядок меньше даже самых быстротечных (5 с) авиакатастроф. В такой системе АРМ за считанные секунды до гибели ВС, пока оно еще находится в воздухе, успеет многократно передать, а центры управления воздушным движением (УВД) тут же (в реальном масштабе времени) надежно и достоверно принять и сохранить информацию о точных значениях текущих координат траектории падения ВС вплоть до момента прекращения его работы, т.е. до места его разрушения.
Естественно, что для реализации системы мгновенного реагирования необходимо использовать "неподвижные" ГС ИСЗ, всегда готовые к мгновенной ретрансляции аварийной информации от АРМ на наземные ППИ. Изобретение предусматривает использование для этой цели пяти ГС ИСЗ и сопряженных с ними ППИ, созданные и введенные в опытную эксплуатацию при первой модернизации системы КОСПАС-САРСАТ.
Мгновенное же "срабатывание" устанавливаемого на борту ВС АРМ нового типа достигается за счет размещения в нем постоянно включенных в полете:
- радиоприемника сигналов спутниковых навигационных систем GPS/ГЛОНАСС, обеспечивающего без задержки дискретную фиксацию текущих значений координат ВС (широту и долготу) с точностью до 100 м;
- передатчика повышенной мощности, всегда готового всего лишь за 0,5 с надежно передать аварийную информацию, при которой не требуется времени накопления сигнала на приемном конце.
Таким образом, изобретение предусматривает применение ГС ИСЗ, высота орбиты которых (R2 = 40000 км) в 11 раз превышает наклонную дальность (R1 = 3500 км) НО ИСЗ действующей системы КОСПАС-САРСАТ. По этой причине обычно полагают, что требуемая мощность (P2) передатчика АРМ нового типа должна основательно превышать мощность (P1 = 5 Вт) АРМ действующей системы КОСПАС-САРСАТ, что приведет к существенному увеличению габаритов и стоимости АРМ. Покажем, что такое предположение не имеет основания. Действительно P2 = P1•G1/G2•(R2/R1)2, где G1 = 2 (3 дБ) - усиление антенны НО ИСЗ; G2 = 50 (17 дБ) - усиление антенны ГС ИСЗ, а следовательно, P2 = 5•2/50•(40000/3500)2 = 20 Вт.
По предварительным оценкам габариты и стоимость АРМ нового типа повышенной мощности будут примерно такими же, как АРМ системы КОСПАС-САРСАТ на базе НО ИСЗ.
Таким образом, предусмотренная изобретением очередная модернизация систем КОСПАС-САРСАТ сводится в основном к созданию и размещению на ВС таких же, как прежде простых и дешевых АРМ. Тем не менее она обеспечит радикальное повышение ее возможностей:
- полное решение до сих пор в принципе не решенной проблемы определения мест авиакатастроф;
- сокращение времени (на 3-4 порядка) и увеличение точности (в 20-30 раз) определения мест неразрушительных аварийных посадок ВС.
Таким образом, в заявленном изобретении для решения проблемы аварийного оповещения в полном объеме необходимо на каждом ВС разместить АРМ. Возникает вопрос относительно рациональности оснащения многих десятков тысяч ВС мирового парка постоянно включенными в полете АРМ лишь для того, чтобы в редчайших случаях определить место авиапроисшествия на одном из них. Негативный ответ на этот вопрос становится очевидным, если учесть, что при нормальных условиях эксплуатации работоспособность АРМ редко контролируется. Поэтому вероятность его надежного срабатывания в экстремальных условиях не может быть высокой. В предусмотренной изобретением совмещенной системе данная проблема решается без затрат естественным путем. Для этого предлагается использовать один и тот же АРМ как для передачи аварийных сигналов, так и сигналов мониторинга. При этом постоянная работа АРМ в режиме "Мониторинг" гарантирует его работоспособность при переключении на режим "Авария". Выбор смежных узких полос излучения сигналов в едином диапазоне частот (400 МГц) для обоих режимов ("Мониторинг" и "Авария") позволяет использовать в АРМ единый широкополосный передатчик. В итоге в совмещенной системе можно не только ограничиться одним АРМ, но и одним находящимся в пределах видимости ГС ИСЗ (см. фиг. 1) и сопряженным с ним ППИ, что почти в два раза сокращает затраты на реализацию системы и основательно повышает ее надежность.
Чтобы обеспечить обслуживание полярной зоны необходимо выбрать такие рабочие частоты, которые позволяют за счет явления дифракции (огибания Земли) преодолеть недостатки, присущие системе ИНМАРСАТ-Е, где используется относительно высокая частота (1500 МГц). В предложенном решении для реализации обоих режимов - "Мониторинг" и "Авария" - выбраны смежные полосы в едином, относительно низкочастотном для спутниковых систем диапазоне 400 МГц, на котором эффект дифракции существенно увеличивается.
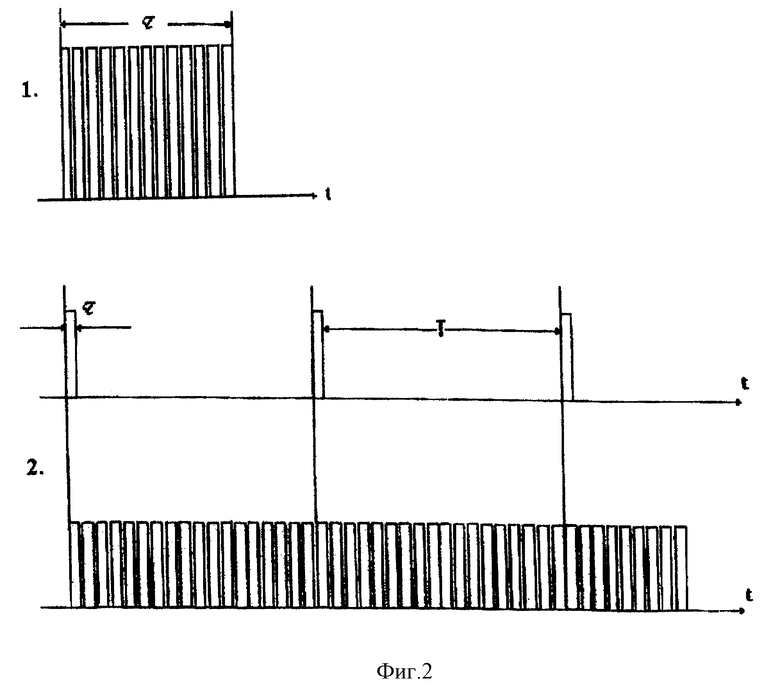
Вариант практической реализации системы глобального автоматического контроля ТС при нормальных (режим "Мониторинг") и экстремальных условиях (режим "Авария") приведен на фиг. 1, где:
1 - размещенный на ВС постоянно включенный в полете АРМ (1), содержащий:
- передатчик (1A), работающий в обоих режимах в едином диапазоне частот (400 МГц) для передачи соответственно сигналов: "Авария" в полосе частот 406,1 - 406,0 МГц = 100 кГц; выделенной в настоящее время для работы международной модернизированной (на базе ГС ИСЗ) аварийной спутниковой системы КОСПАС-САРСАТ, а сигналов "Мониторинг" - в смежной полосе частот той же ширины (100 кГц),
- единый навигационный приемник (1B) сигналов спутниковых навигационных систем GPS и/или ГЛОНАСС;
2 - пять ГС ИСЗ действующей международной спутниковой метеосистемы, обеспечивающих глобальный охват Земли, или ГС ИСЗ других спутниковых систем, на которых могут размещаться бортовые ретрансляторы 3A и 3B;
3 - ретрансляторы сигналов "Авария" (3A) и "Мониторинг" (3B);
4 - навигационные ИСЗ систем GPS и ГЛОНАСС;
5 - пять наземных ППИ, сопряженных со своими ГС ИСЗ;
6 - центры управления воздушным движением (УВД), сопряженные со своими ППИ.
На фиг. 2 даны характеристики передачи информации в режиме "Мониторинг", где:
1 - пакет импульсов сигнала;
2 - диаграммы следования пакетов при синхронном методе передачи.
Заявляемая система реализуется следующим образом.
На борту ВС размещают АРМ 1 (фиг. 1), содержащий:
- приемник 1B (фиг. 1) сигналов спутниковых навигационных систем GPS и/или ГЛОНАСС 4 (фиг. 1), что позволяет постоянно получать дискретную информацию о текущих координатах ВС в реальном масштабе времени с точностью до 100 м. В большинстве случаев такой приемник является штатным бортовым устройством ВС, однако, в случае его отсутствия он должен быть вмонтирован в АРМ (альтернативно);
- передатчик 1А (фиг. 1), на который поступают сигналы от навигационного приемника 1B (фиг. 1), постоянно включенный в режиме передачи информации о текущих значениях координат ("Мониторинг") на весь период полета, при этом для обеспечения уверенной связи с ГС ИСЗ мощность единого передатчика АРМ должна быть повышенной (более 20 Вт);
На выделенной для УВД узкой полосе частот (до 100 кГц) в диапазоне 400 МГц информацию о текущих значениях координат передают со стандартной скоростью 400 бит/с пакетами длительностью τ = 0,52 с (см. фиг. 2) на ретранслятор 3B (фиг. 1) ГС ИСЗ международной метеорологической системы или на ГС ИСЗ альтернативной системы.
Усиленные ретранслятором 3B пакетные сигналы принимают на сопряженных с ГС ИСЗ ППИ 5 (фиг. 1), фиксируют и передают на центры УВД 6 (фиг. 1).
Если же на ВС возникает чрезвычайная ситуация, то специальный бортовой анализатор мгновенно переключает АРМ на работу в режиме "Авария".
Таким образом, в соответствии с изобретением для реализации обоих режимов используют смежные узкие полосы в едином диапазоне частот (400 МГц), единую скорость передачи (400 бит/с), мощность передатчика увеличивают до 20 Вт или более, стандартную структуру пакета информации равной длительностью ( τ = 0,52 с). Единые требования к электрическим параметрам системы предопределили возможность реализовать оба режима не двумя, а одним аппаратным комплексом (АРМ, ГС ИСЗ, ППИ) двойного применения.
Несмотря на малую длительность пакета ( τ = 0,52 с), в каждом из них (см. фиг. 2) закодированы пять текущих значений полетных параметров ВС: широта и долгота с точностью до 100 м, высота, курс и скорость полета, а также данные от датчиков о техническом состоянии ВС и его идентификационный номер. Эти параметры поступают на вход передатчика от размещенного в АРМ (или на борту ВС) навигационного приемника сигналов спутниковых систем GPS и/или ГЛОНАСС.
Но если при катастрофах излучение пакетов информации следует практически непрерывно (T ≈ 0,5 с), то в режиме "Мониторинг" - с интервалами T > 10 с.
Из фиг. 2 также следует, что в режиме "Мониторинг", т.е. при нормальных условиях эксплуатации, работоспособность АРМ постоянно контролируется (идет сигнал "Мониторинга" или нет) через малые интервалы времени и поэтому надежная работа АРМ при возникновении экстремальных условий гарантируется. Следовательно, работа АРМ в совмещенной системе содействует значительному повышению его надежности, т.е. его срабатывания при авиапроисшествиях.
Как уже отмечалось, для переключения АРМ на аварийную полосу частот (406,0 - 406,1 МГц) при авиапроисшествиях используется бортовой анализатор ВС, создание которого сопряжено с трудностями. В совмещенной системе данная задача может быть решена и без бортового анализатора - за счет экстраполяции эволюции изменения значений полетных параметров ВС в режиме "Мониторинг", предшествующей пропаданию сигнала (фиг. 2).
Из изложенного также следует, что совмещенная система может решить проблему поиска мест авиакатастроф при любой, сколь угодно малой длительности, и даже при взрыве.
Что касается режима "Мониторинг", то регулярное поступление данных о текущих координатах ВС в компьютеры на центрах УВД создает предпосылку для принципиально нового подхода к решению проблемы авиационной безопасности. Мгновенная обработка полученных данных, поступающих от всех находящихся в зоне действия центра УВД ВС, позволит прогнозировать развитие ситуации и предупреждать ВС (по обычным каналам связи) об угрозе столкновения с воздушными и наземными объектами с целью его предотвращения.
В предлагаемой системе сбор данных от ВС центрами УВД осуществляется непосредственно через космос без участия Земли. При этом отпадает необходимость в создании и эксплуатации сложного дорогостоящего наземного комплекса радаров сопровождения, ретрансляционных радиостанций и традиционной для УВД инфраструктуры.
Главное отличие предложенного в изобретении подхода к решению данной проблемы в том, что в его основе положено решение обеих составляющих задач безопасности полетов в рамках одной совмещенной системы двойного применения, содержащей лишь один аппаратный комплекс. За счет этого затраты на реализацию и эксплуатацию совмещенной системы значительно ниже, чем при применении двух автономных систем. Вместе с тем, как это следует из приводимых ниже сопоставлений, эффективность решения совмещенной системой каждой из составляющих задач ("Авария" и "Мониторинг") безопасности полетов будут значительно выше, чем у двух автономных систем вместе взятых.
Следует иметь ввиду, что число ВС, которые одновременно могут оказаться в одной из подспутниковых зон (зоне видимости одного ГС ИСЗ), исчисляется многими сотнями единиц, а режим "Мониторинг" должен обеспечиваться без взаимных помех. При случайном (асинхронном) времени излучения в любом частотно-разделенном канале (ЧРК) пакетов информации от АРМ каждого ВС велика вероятность их взаимной "аннигиляции" (взаимоуничтожения). Чтобы исключить взаимные помехи и при этом обеспечить максимальную пропускную способность каждого радиоканала ЧРК, выделенного для "Мониторинга", изобретение, как это следует из фиг. 2, предусматривает синхронную (организованную) передачу, при которой индивидуальные пакеты сигналов от АРМ каждого ВС следуют один за другим с минимальными зазорами (интервалами). В соответствии с изобретением, требуемая синхронизация обеспечивается сигналами единого времени (точность до 5 мс), содержащиеся в сигналах спутниковых систем GPS/ГЛОНАСС, принимаемых навигационными приемниками АРМ (или бортовыми приемниками). Из фиг. 2 следует, что максимальное число ВС, работающих в одном канале (пропускная способность канала), определяется как n = k•T/ τ . Так, например, при коэффициенте заполнения k = 0,8, T = 20 с, τ - 0,52 с, получаем n = 30.
Для обеспечения системой глобального охвата Земли необходимо использовать 5 ГС ИСЗ, поэтому для одновременного обслуживания до 600 ВС в каждой из 5 подспутниковых зон (всего 3000 ВС) требуется всего лишь 20 радиоканалов. Если учесть, что в предлагаемой системе применяется частотное разделение каналов (ЧРК) с шагом сетки Δf = 2 кГц, то для реализации глобального "Мониторинга" потребуется незначительная полоса частот в 40 кГц. С учетом же других видов ТС и необходимого запаса, требуемая для работы системы полоса частот не превысит 100 кГц.
Для сопоставления отметим, что выделенная в настоящее время для международной спутниковой метеосистемы (5 ГС ИСЗ) полоса частот Δf = 403-401 МГц = 2 МГц, что в 50 раз шире полосы частот, требуемой для реализации глобального "Мониторинга".
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ГЛОБАЛЬНОГО АВТОМАТИЧЕСКОГО КОНТРОЛЯ В РЕЖИМЕ РЕАЛЬНОГО ВРЕМЕНИ ПАРАМЕТРОВ СОСТОЯНИЯ ОБЪЕКТОВ | 2007 |
|
RU2340004C1 |
| СПОСОБ НЕПРЕРЫВНОГО КОНТРОЛЯ ЦЕЛОСТНОСТИ ВОЗДУШНЫХ СУДОВ НА ВСЕХ УЧАСТКАХ ПОЛЕТА | 2013 |
|
RU2542746C2 |
| МАЛОГАБАРИТНАЯ СИСТЕМА СБОРА И РЕГИСТРАЦИИ ПОЛЕТНОЙ ИНФОРМАЦИИ | 2012 |
|
RU2558610C2 |
| Станция (система) приёма и обработки информации от среднеорбитального сегмента космической системы поиска и спасания и способ управления наведением антенн этой станции | 2015 |
|
RU2622390C2 |
| СИСТЕМА ДЛЯ ОБНАРУЖЕНИЯ И ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ЧЕЛОВЕКА, ТЕРПЯЩЕГО БЕДСТВИЕ НА ВОДЕ | 2010 |
|
RU2449917C1 |
| СПУТНИКОВАЯ СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ СУДОВ И САМОЛЁТОВ, ПОТЕРПЕВШИХ АВАРИЮ | 2001 |
|
RU2201601C2 |
| АВАРИЙНЫЙ РАДИОМАЯК | 1999 |
|
RU2157546C1 |
| СПУТНИКОВАЯ СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ СУДОВ И САМОЛЕТОВ, ПОТЕРПЕВШИХ АВАРИЮ | 2016 |
|
RU2629000C1 |
| АВАРИЙНО-СПАСАТЕЛЬНЫЙ РАДИОМАЯК | 2010 |
|
RU2438144C1 |
| СПУТНИКОВАЯ СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ СУДОВ И САМОЛЕТОВ, ПОТЕРПЕВШИХ АВАРИЮ | 1992 |
|
RU2027195C1 |
Изобретение относится к системам контроля координат и состояния транспортных средств (ТС) при нормальных (режим "Мониторинг") и экстремальных (режим "Авария") условиях эксплуатации. Технический результат состоит в реализации обоих режимов единым аппаратным комплексом, включающим размещение на каждом ТС постоянно включенного в процессе эксплуатации радиомаяка (РМ) совмещенного типа мгновенного действия, сигналы которого ретранслируются через геостационарные ИСЗ совмещенного типа на сопряженные с ними наземные пункты приема информации (ППИ) также совмещенного типа. При возникновении на ТС экстремальных условий передача информации от РМ осуществляется практически непрерывно пакетами сигналов с зазорами между ними до 1 с в узкой полосе частот в диапазоне 400 МГц в специально выделенной для передачи через ИСЗ аварийных сигналов, а в нормальных условиях - в смежной узкой полосе частот с интервалами между пакетами более 10 с. Система характеризуется тем, что время ее реагирования (0,5 с) на порядок меньше даже самых быстротечных (5 с) авиакатастроф. При этом время поиска мест возникновения экстремальных условий сокращается на 2-3 порядка, а в нормальных условиях пропускная способность системы увеличивается на 1-2 порядка. Дополнительное увеличение пропускной способности системы в 20-30 раз обеспечивается за счет того, что пакеты информации от РМ, размещенных на каждой из групп ТС и работающих в одном радиоканале, передаются синхронно (организованно) один за другим через малые временные зазоры (до 0,1 с), причем синхронизация обеспечивается метками точного (до 0,5 мс) времени, выделяемыми приемниками РМ из навигационных сигналов спутниковых систем GPS и/или ГЛОНАСС. 1 з.п. ф-лы, 2 ил.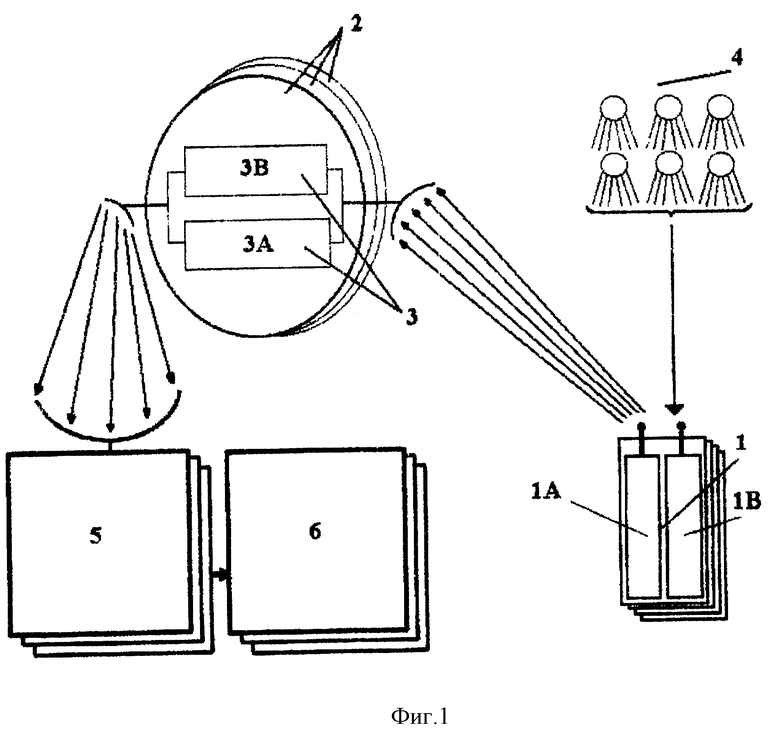
| НЕВДЯЕВ Л.М | |||
| Мобильная спутниковая связь | |||
| - М.: МЦТИ, 1998, с.41-44 и 69 | |||
| Международная космическая радиотехническая система обнаружения терпящих бедствие/Под ред | |||
| В.С.ШЕБШАЕВИЧА | |||
| - М.: Радио и связь, 1987, с.13, 14, 69 и 70 | |||
| СПУТНИКОВАЯ СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ СУДОВ И САМОЛЕТОВ, ПОТЕРПЕВШИХ АВАРИЮ | 1992 |
|
RU2027195C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ИНФОРМАЦИОННОГО ОБЕСПЕЧЕНИЯ ПОИСКА И СПАСЕНИЯ ПРИ БЕДСТВИЯХ НА МОРЕ | 1997 |
|
RU2117959C1 |
| US 4884208, 28.11.1989 | |||
| US 5414432 A, 09.05.1995. | |||

