Изобретение относится к радиотехническим средствам определения направления, местоположения, измерения расстояния или скорости с использованием разнесенных антенн и измерением фазового сдвига или временного запаздывания снимаемых с них сигналов (системы определения разности пути, пройденного сигналом) и, в частности, к способам определения координат передатчиков в системах спутниковой связи с ретранслятором на геостационарном Искусственном Спутнике Земли.
Известен способ, описанный в патенте США №5008679, Н 04 В 7/185 (G 01 S 5/02), опубл. 16.04.91.
Способ определения координат неизвестного передатчика состоит в приеме и переизлучении сигнала передатчика, координаты которого предстоит определить, ретрансляторами, расположенными на борту двух близко расположенных на геостационарной орбите Искусственных Спутников Земли (ИСЗ), приеме переизлученных сигналов двумя Земными Станциями и вычислении искомых координат в точке пересечения кривой постоянной временной задержки принятых сигналов с кривой постоянного доплеровского смещения частоты принятых сигналов.
Недостаток данного способа состоит в невысокой точности определения координаты неизвестного передатчика.
Наиболее близким по технической сущности к предлагаемому решению является способ, описанный в патенте США №5570096, G 01 S 5/02, опубл. 29.10.96.
Способ определения координат неизвестного передатчика в системе спутниковой связи состоит в излучении передатчиком трассировочного сигнала на спутник и приеме, как минимум, одним Земным приемником сигнала, ретранслированного аппаратурой спутника с определением скорости и позиции спутника по принятому сигналу с последующим определением координат неизвестного передатчика в точке пересечения на поверхности Земли кривой постоянной разности времени прихода сигналов неизвестного передатчика с двух спутников и кривой постоянного значения Доплеровского смещения частоты.
Недостаток способа-прототипа характеризуется низкой точностью определения координат неизвестного передатчика, причиной чего является методическая погрешность, которая увеличивается с ростом удаления неизвестного передатчика от подспутниковой точки [С.П.Панько, В.В.Сухотин. Фазовая пеленгация в спутниковой связи. Электронный журнал "Исследовано в России", 35, стр.380-388, 2003 г., http://zhumal.gpi.ru], а также погрешность, связанная с суточными, сезонными и пр. измененями электромагнитных характеристик трассы распространения сигналов.
Предлагаемым изобретением достигается технический результат - повышение точности определения координат неизвестного передатчика в системе спутниковой связи с ретранслятором на геостационарном Искусственном Спутнике Земли.
Для получения такого технического результата в предлагаемом способе определения координат неизвестного передатчика в системе спутниковой связи с ретранслятором на геостационарном Искусственном Спутнике Земли, включающем излучение передатчиком трассировочного сигнала на спутник и приеме Земным приемником трассировочного сигнала, ретранслированного аппаратурой спутника, с определением позиции спутника по принятому сигналу, согласно изобретению формируют массив кластеров, каждый в составе 3+n элементов, первый, второй и третий элементы каждого кластера представляют, соответственно, значения координат спутника: дальности, угла места и азимута, четвертый элемент представляет значение фазы сигнала неизвестного передатчика на момент определения координат спутника, а последующие элементы каждого кластера представляют фазы сигналов легитимных передатчиков, координаты которых известны, также на момент определения координат спутника, выбирают, как минимум, четыре наилучших кластера, сгруппированных в пары, из которых формируют, как минимум, две виртуальные базы, соответственно, для вычисления координат легитимных и неизвестного передатчиков, по известным координатам легитимных передатчиков и результатам вычисления их координат вычисляют погрешности измерения, которые учитывают при вычислении координат неизвестного передатчика.
Отличительные признаки предлагаемого способа заключаются в следующем: формируют массив кластеров, каждый в составе 3+n элементов, первый, второй и третий элементы каждого кластера представляют, соответственно, значения координат спутника: дальности, угла места и азимута, четвертый элемент представляет значение фазы сигнала неизвестного передатчика на момент определения координат спутника, а последующие элементы каждого кластера представляют фазы сигналов легитимных передатчиков, координаты которых известны, также на момент определения координат спутника, выбирают, как минимум, четыре наилучших кластера, сгруппированных в пары, из которых формируют, как минимум, две виртуальные базы, соответственно, для вычисления координат легитимных и неизвестного передатчиков, по известным координатам легитимных передатчиков и результатам вычисления их координат вычисляют погрешности измерения, которые учитывают при вычислении координат неизвестного передатчика.
Предлагаемый способ определения координат неизвестного передатчика осуществляют в следующей последовательности: излучение передатчиком трассировочного сигнала на спутник с целью точного определения текущих координат ИСЗ (азимута, угла места и дальности), прием Земным приемником трассировочного сигнала, ретранслированного аппаратурой спутника для измерения текущей дальности спутника, прием сигналов неизвестного передатчика и легитимных передатчиков, координаты которых известны, формируют массив кластеров, каждый в составе 3+n элементов, первый, второй и третий элементы каждого кластера представляют, соответственно, значения координат спутника: дальности, угла места и азимута, четвертый элемент представляет значение фазы сигнала неизвестного передатчика на момент определения координат спутника, а последующие элементы каждого кластера представляют фазы сигналов легитимных передатчиков, координаты которых известны, также на момент определения координат спутника, выбирают, как минимум, четыре наилучших кластера, сгруппированных в пары, из которых формируют, как минимум, две виртуальные базы, соответственно, для вычисления координат легитимных и неизвестного передатчиков, по известным координатам легитимных передатчиков и результатам вычисления их координат вычисляют погрешности измерения, которые учитывают при вычислении координат неизвестного передатчика.
На фиг.1 представлена структурная схема устройства, реализующего заявляемый способ. На фиг.2. приведена расчетная зависимость погрешности определения одной из координат ΔY (градусов) от значения самой координаты Y (градусов).
Устройство на фиг.1, реализующее заявляемый способ, содержит: приемопередающую антенну 1, контроллер антенны 2, фильтр прием/передача 3, усилитель мощности 4, модулятор 5, синтезатор частот 6, генератор псевдослучайной последовательности 7, приемный блок трассировочного сигнала 8, коррелятор 9, приемный блок сигнала неизвестного передатчика 101, приемные блоки сигналов легитимных передатчиков 102...10n, блок измерения дальности 11, буфер данных 12, блок выбора как минимум 4-х кластеров 13, блок вычисления координат легитимных передатчиков 14, узел постоянного хранения координат легитимных передатчиков 15, блок вычисления координат неизвестного передатчика 16.
Способ определения координат неизвестного передатчика реализуется следующим образом. Приемопередающая антенна 1 служит для передачи и приема трассировочного сигнала, а также приема сигналов неизвестного и легитимных передатчиков. По трассировочному сигналу определяется дальность ИСЗ. Измерение дальности ИСЗ производится путем оценки времени запаздывания сигнала, формируемого генератором псевдослучайной последовательности (ПСП) 7. В прототипе это сигнал назван трассировочньм. ПСП модулирует в модуляторе 5 несущую частоту, формируемую в синтезаторе частот 6. Модулированный сигнал усиливается в усилителе мощности 4 и через фильтр прием/передача 3 излучается с помощью приемопередающей антенны в сторону ИСЗ. Сигнал ПСП, ретранслированный аппаратурой ИСЗ, преобразуется приемопередающей антенной 1, проходит фильтр прием/передача 3 и принимается приемным блоком трассировочного сигнала 8. В корреляторе 9 производится сравнение по времени излученной и принятой ПСП, что позволяет вычислить задержку по времени принятой ПСП относительно излученной ПСП и далее в блоке измерения дальности 11 измерить дальность ИСЗ. Приемопередающая антенна 1 работает в режиме слежения за перемещениями ИСЗ. Это необходимо потому, что угловая ширина диаграммы направленности антенн спутниковой связи, как правило, значительно меньше углового размера траектории суточного перемещения ИСЗ, которая очертанием напоминает цифру «8». Слежение приемопередающей антенны за перемещением ИСЗ осуществляет контроллер антенны 2, который таким образом обеспечивает измерение азимута и угла места ИСЗ относительно Земной Станции. Данные об азимуте, угле места и дальности исчерпывающим образом описывают положение ИСЗ. Эти данные заносятся в буфер данных 12. Сигнал неизвестного передатчика поступает на приемный блок сигнала неизвестного передатчика 101. Сигналы легитимных передатчиков поступают на приемные блоки 102...10n. Функции всех приемных блоков 101...10n состоят в приеме сигналов, компенсации Доплеровского смещения частоты, оценке и запоминании мгновенного значения фазы несущих частот сигналов, поступающих на входы приемных блоков, т.е. сигналов неизвестного и легитимных передатчиков. Значения трех координат ИСЗ, а также фаз сигналов неизвестного и легитимных передатчиков группируют в кластеры. Параметры элементов каждого кластера определяются в один момент времени. На приемные блоки 101...10n поступают гетеродинные сигналы от синтезатора частот 6. В буфере данных 12 производится накопление достаточно большого количества кластеров, значения элементов которых изменяются в процессе движения ИСЗ. Периодичность формирования кластеров определяется требуемой точностью оценки координат неизвестного передатчика. После накопления в буфере данных 12 большого количества кластеров в блоке 13 производится выбор, как минимум, 4-х кластеров, сгруппированных в пары. Обе пары представляют собой две эквивалентные виртуальные базы. Координаты концов двух виртуальных баз заданы первыми тремя элементами (угловыми координатами и дальностью спутника в момент произведения измерений) в выбранных кластерах. Зная эти координаты, легко вычислить пространственное расположение виртуальной базы относительно экваториально-меридиональной плоскости и длину базы. Критерием выбора кластеров из накопленного массива является степень близости угла пересечения виртуальных баз к 90°, при котором минимизируется погрешность определения координат неизвестного передатчика и координат легитимных передатчиков. Из элементов выбранных кластеров в блоке 14 вычисляются координаты легитимных передатчиков с погрешностью, вызванной, в частности, состоянием трассы распространения сигналов и методической погрешностью. В узле постоянного хранения 15 хранятся точные значения координат легитимных передатчиков. Это позволяет вычислить в блоке 14 также текущее значение реальной погрешности путем вычисления разности между точным и измеренным значением. В блоке 16 производится вычисление координат неизвестного передатчика и учитывается значение погрешности с выхода блока 14.
Применение данного изобретения дает возможность высокоточного определения координат неизвестного передатчика, расположенного в любой точке поверхности Земного шара в зоне обслуживания коммуникационного ИСЗ, расположенного на геостационарной орбите.
Повышение точности определения координат может быть доказано следующим образом на примере только одной географической координаты неизвестного передатчика. На фиг.2 приведена расчетная зависимость погрешности определения одной из координат ΔY (градусов) от значения самой координаты Y (градусов) [см. цитированное выше]. Значение Y=0 соответствует подспутниковой точке, когда расстояние между спутником и поверхностью Земли минимально. Если неизвестный передатчик расположен в подспутниковой точке, то методическая погрешность равна нулю. Погрешность, вызванная состоянием трассы распространения сигнала, неизвестна и может быть существенной для любого расположения неизвестного передатчика. Пусть также легитимные передатчики расположены в позициях Y1, Y2, Y3. Поскольку координаты легитимных передатчиков известны, то по результатам измерения легко вычислить погрешности ΔY1, ΔY2, ΔY3. Наиболее просто использовать ступенчатую аппроксимацию кривой реальной погрешности (жирная линия на фиг.2) и вычислять искомую координату по правилам, приведенным в таблице.
Здесь Y1изм, Y2изм - измеренные значения координат легитимных передатчиков.
Пусть неизвестный передатчик расположен в позиции Yнп. Тогда, как видно из фиг.2, погрешность по прототипу составляет 0,75°. Погрешность определения координат по предлагаемому способу не превышает 0,25°. Использование других методов аппроксимации, например линейной или с помощью сплайн-функций, с узлами в точках размещения легитимных передатчиков позволит еще более повысить эффективность предложенного способа.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ НЕИЗВЕСТНОГО ПЕРЕДАТЧИКА В СИСТЕМЕ СПУТНИКОВОЙ СВЯЗИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2218579C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ КООРДИНАТ НЕИЗВЕСТНОГО ПЕРЕДАТЧИКА | 2001 |
|
RU2215300C2 |
| Способ определения местоположения земной станции спутниковой связи | 2017 |
|
RU2653866C1 |
| СПОСОБ ВЫСОКОТОЧНЫХ ИЗМЕРЕНИЙ ТРАЕКТОРНЫХ КООРДИНАТ ЛЕТАТЕЛЬНОГО АППАРАТА В ЛЕТНЫХ ИССЛЕДОВАНИЯХ НА ТРАССАХ БОЛЬШОЙ ПРОТЯЖЕННОСТИ | 2008 |
|
RU2393430C1 |
| СИСТЕМА СПУТНИКОВОЙ СВЯЗИ | 1994 |
|
RU2124270C1 |
| Способ определения местоположения земной станции спутниковой связи по ретранслированному сигналу | 2024 |
|
RU2837386C1 |
| УСТРОЙСТВО И СПОСОБ СПУТНИКОВОГО РАДИООПРЕДЕЛЕНИЯ | 1996 |
|
RU2181490C2 |
| Способ определения местоположения земной станции спутниковой связи по ретранслированному сигналу | 2024 |
|
RU2834416C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ VSAT-СТАНЦИИ В СПУТНИКОВОЙ СЕТИ | 2010 |
|
RU2450284C2 |
| СПОСОБ СОВМЕЩЕННОЙ РАДИОСВЯЗИ И РАДИОНАВИГАЦИИ И УСТРОЙСТВО, ЕГО РЕАЛИЗУЮЩЕЕ, ДЛЯ ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТА | 2004 |
|
RU2278047C1 |
Изобретение относится к радиотехническим средствам определения направления, местоположения, измерения расстояния или скорости с использованием разнесенных антенн и измерением фазового сдвига или временного запаздывания снимаемых с них сигналов. Техническим результатом является повышение точности определения координат неизвестного передатчика в системе спутниковой связи с ретранслятором на геостационарном Искусственном Спутнике Земли. Для этого предлагаемый способ определения координат неизвестного передатчика основан на излучении передатчиком трассировочного сигнала на спутник, приеме Земным приемником трассировочного сигнала, приеме сигналов неизвестного передатчика и легитимных передатчиков, координаты которых известны, формировании массива кластеров, выборе наилучших кластеров, из которых формируются виртуальные базы для вычисления координат легитимных и неизвестного передатчиков, по известным координатам легитимных передатчиков и результатам вычисления их координат вычисляются погрешности измерения, которые учитываются при вычислении координат неизвестного передатчика. 2 ил., 1 табл.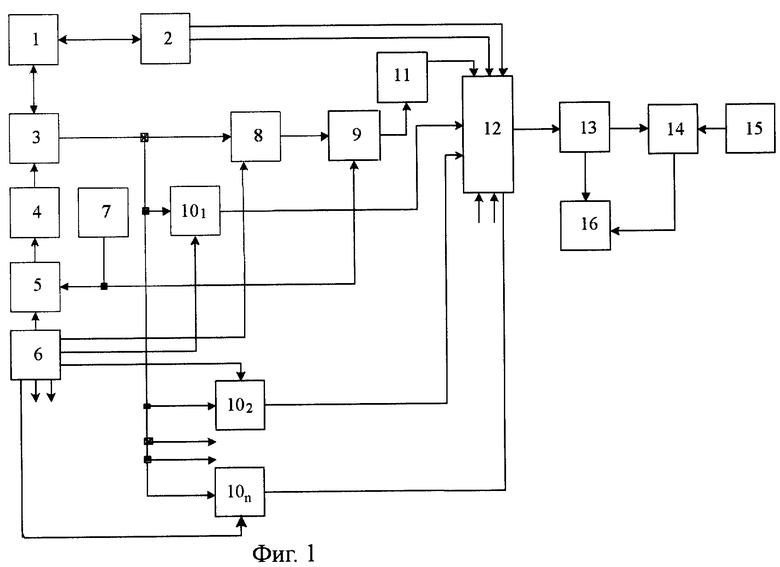
Способ определения координат неизвестного передатчика в системе спутниковой связи, включающий излучение передатчиком трассировочного сигнала на спутник и приеме земным приемником трассировочного сигнала, ретранслированного аппаратурой спутника, с определением позиции спутника по принятому сигналу, отличающийся тем, что формируют массив кластеров, каждый в составе 3+n элементов, первый, второй и третий элементы каждого кластера представляют соответственно значения координат спутника: дальности, угла места и азимута, четвертый элемент представляет значение фазы сигнала неизвестного передатчика на момент определения координат спутника, а последующие элементы каждого кластера представляют фазы сигналов легитимных передатчиков, координаты которых известны, также на момент определения координат спутника выбирают, как минимум, четыре наилучших кластера, сгруппированных в пары, из которых формируют, как минимум, две виртуальные базы для вычисления координат легитимных и неизвестного передатчиков, по известным координатам легитимных передатчиков и результатам вычисления их координат вычисляют погрешности измерения, которые учитывают при вычислении координат неизвестного передатчика.
| US 5570096 А, 29.10.1996 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ ДИФФЕРЕНЦИАЛЬНЫХ ПОПРАВОК | 1990 |
|
RU2012012C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ЗЕМНОЙ СТАНЦИИ СПУТНИКОВОЙ СВЯЗИ ПО РЕТРАНСЛИРОВАННОМУ СИГНАЛУ | 2000 |
|
RU2172495C1 |
| ОБМОТКА ОДНОФАЗНОГО ДВИГАТЕЛЯ К ИЗМЕНЯЕМЫМ ЧИСЛОМ ПОЛЮСОВ | 1996 |
|
RU2101833C1 |
| Магнитный импульсный генератор | 1971 |
|
SU450325A1 |
| СПОСОБ (ВАРИАНТЫ) И СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ОБЪЕКТА | 1990 |
|
RU2084916C1 |

