[0001] Данное изобретение касается усовершенствованного управления электродвигателем, соединенного во время работы с частотно-регулируемым электроприводом. В частности, изобретение предлагает контроллеры, системы и способы для улучшения рабочей характеристики электродвигателя, получающего электропитание от частотно-регулируемого электропривода.
Предпосылки создания изобретения
[0002] Множество обычных систем оборудования с приводом от электродвигателя приводятся в действие частотно-регулируемыми электроприводами. Во многих применениях частотно-регулируемый электропривод не может быть расположен рядом с приводимым в действие оборудованием. Например, погружной насос с электродвигателем, используемый в добыче углеводородов, может быть отделен от связанного с ним частотно-регулируемого электропривода тысячами футов электрического кабеля. Такой большой разнос обычно требует использование фильтра на выходе частотно-регулируемого электропривода. Кроме того, трансформатор обычно используется, чтобы повысить напряжение с целью минимизировать сечение кабеля. Цель поиска в течение длительного времени состояла в том, чтобы увеличить удельную мощность электродвигателя (мощность на единицу длины) и кпд оборудования. Одним способом реализовать такие более высокие коэффициенты полезного действия оборудования является использование электродвигателей с постоянными магнитами, которые развивают более высокую удельную мощность по сравнению с асинхронным электродвигателем соответственного размера. По сравнению с асинхронным электродвигателем электродвигатели с постоянными магнитами вызывают особенно трудные проблемы управления. Например, эффективная работа электродвигателя с постоянными магнитами требует знания положения ротора для надлежащей синхронизации с токами статора. Обычно электродвигатель с постоянными магнитами будет использовать датчик углового положения, такой как энкодер или резольвер, чтобы контролировать положение ротора, иногда называемое углом поворота ротора. Данные о положении ротора передаются от электродвигателя на частотно-регулируемый электропривод, который использует эти данные, чтобы поддерживать надлежащую синхронизацию ротора. Однако для оборудования, расположенного на расстоянии от частотно-регулируемого электропривода, и вследствие жестких условий, в которых часто должно работать оборудование, физический датчик является непривлекательным и необходимы дополнительной варианты, так как при таких обстоятельствах не является практичным использовать физический датчик положения ротора.
[0003] Альтернативой использования датчика обратной связи по положению, расположенного в электродвигателе, является использование детального знания эксплуатационных характеристик электродвигателя вместе с измерениями тока и напряжения электродвигателя для оценки угла поворота ротора. Эти способы известны как "бессенсорные" способы управления и на практике обычно очень трудно реализуемы. Кроме того, различные модели частотно-регулируемых электроприводов показывают различные уровни способности осуществлять бессенсорное управление. В некоторых случаях электродвигатель должен составлять пару с определенным типом частотно-регулируемого электропривода, так как только некоторые частотно-регулируемые электроприводы, имеющиеся на рынке, могут быть совместимыми с конкретным электродвигателем. В результате, рабочие характеристики электродвигателя могут значительно изменяться в зависимости от выбранного частотно-регулируемого электропривода. С практической точки зрения, так как предполагаемый срок службы электродвигателя, применяемого в жестоких условиях окружающей среды, может быть значительно короче, чем предполагаемый срок службы частотно-регулируемого электропривода, который приводит в действие электродвигатель, операторы нефтяных месторождений извлекли бы выгоду, если бы большая взаимозаменяемость могла быть достигнута между различными электродвигателями и имеющимися на рынке частотно-регулируемыми электроприводами. Хотя рассмотренные здесь технические сложные проблемы распространяются на электродвигатели в целом, они особенно трудны, когда применяются электродвигатели с постоянными магнитами, из-за потребности синхронизации токов статора с положением ротора. Такая неопределенность представляет собой препятствие распространению на рынке оборудования, содержащего электродвигатели с постоянными магнитами, несмотря на выигрыш в эффективности эксплуатации, обеспечиваемой электродвигателем с постоянными магнитами. Таким образом, остается потребность в дальнейшем улучшении удобства использования частотно-регулируемого электропривода для снабжения энергией электродвигателя.
Сущность изобретения
[0004] В одной форме осуществления данного изобретения предлагается контроллер, сконфигурированный для сопряжения с частотно-регулируемым электроприводом и электродвигателем, и содержащий: (а) один или более датчиков напряжения и тока, сконфигурированных для связи с линией электропитания, соединяющей частотно-регулируемый электропривод и электродвигатель; и (b) модуль интерфейса сигналов, сконфигурированный для приема одного или более электрических сигналов, связанных с состоянием работы электродвигателя, от одного или более датчиков напряжения и тока, причем модуль интерфейса сигналов сконфигурирован для сопоставления принимаемых электрических сигналов с положением ротора электродвигателя, и передачи сигналов, соответствующих положению ротора, или команд управления работой частотно-регулируемого электропривода на частотно-регулируемый электропривод.
[0005] В другой форме осуществления данного изобретения предлагается система, содержащая: частотно-регулируемый электропривод, соединенный с помощью линии электропитания с электродвигателем; контроллер, сопряженный с частотно-регулируемым электроприводом и электродвигателем, причем контроллер содержит: (а) один или более датчиков напряжения и тока, связанных с линией электропитания, соединяющей частотно-регулируемый электропривод и электродвигатель; и (b) модуль интерфейса сигналов, сконфигурированный для приема одного или более электрических сигналов, связанных с состоянием работы электродвигателя, от одного или более датчиков напряжения и тока, причем модуль интерфейса сигналов сконфигурирован для сопоставления принимаемых электрических сигналов с положением ротора электродвигателя, и передачи сигналов, соответствующих положению ротора, или команд управления работой частотно-регулируемого электропривода на частотно-регулируемый электропривод.
[0006] В еще одной форме осуществления данного изобретения предлагается способ работы электродвигателя, приводимого в действие частотно-регулируемым электроприводом, включающий: (а) прием в модуле интерфейса сигналов контроллера, сопряженного с частотно-регулируемым электроприводом и электродвигателем, одного или более электрических сигналов, связанных с состоянием работы электродвигателя, от одного или более датчиков напряжения и тока линии электропитания, связанных с линией электропитания, соединяющей частотно-регулируемый электропривод и электродвигатель, причем модуль интерфейса сигналов сконфигурирован для сопоставления принимаемых электрических сигналов с положением ротора электродвигателя и передачи сигналов, соответствующих положению ротора, или команд управления работой частотно-регулируемого электропривода на частотно-регулируемый электропривод; и (b) изменение одного или более параметров режима работы частотно-регулируемого электропривода в ответ на сигнал, переданный контроллером на частотно-регулируемый электропривод.
Краткое описание чертежей
[0007] Различные особенности, аспекты и преимущества данного изобретения станут более понятны после прочтения нижеследующего подробного описания, приводимого со ссылкой на приложенные чертежи, на которых одинаковые позиции могут представлять аналогичные части на всех чертежах. Если не указано иное, приведенные здесь чертежи предназначены для иллюстрации, чтобы пояснять ключевые признаки изобретения. Эти ключевые признаки изобретения применимы к большому разнообразию систем, которые включают одну или несколько форм осуществления изобретения. В связи с этим чертежи не предназначены для того, чтобы включать все обычные детали, которые известны специалистам средней квалификации в данной области техники и необходимы для применения изобретения на практике.
[0008] Фиг. 1 поясняет систему, предлагаемую данным изобретением.
[0009] Фиг. 2 поясняет контроллер, предлагаемый данным изобретением.
[0010] Фиг. 3 поясняет модуль подачи сигнала, используемый согласно одной или нескольким формам осуществления данного изобретения.
[0011] Фиг. 4 поясняет модуль подачи сигнала, используемый согласно одной или нескольким формам осуществления данного изобретения.
[0012] Фиг. 5 поясняет модуль подачи сигнала, используемый согласно одной или нескольким формам осуществления данного изобретения.
[0013] Фиг. 6 поясняет модуль подачи сигнала, используемый согласно одной или нескольким формам осуществления данного изобретения.
[0014] Фиг. 7 поясняет модуль подачи сигнала, используемый согласно одной или нескольким формам осуществления данного изобретения.
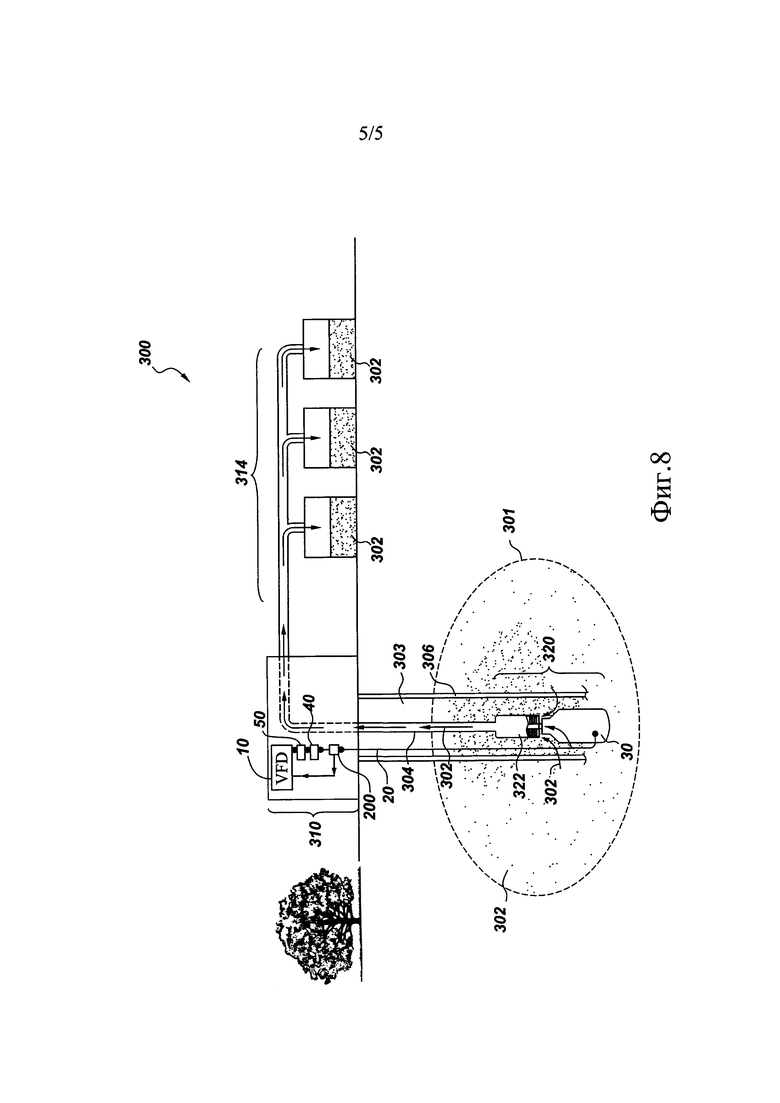
[0015] Фиг. 8 поясняет применение одной или нескольких форм осуществления данного изобретения.
Подробное описание
[0016] В нижеследующем описании и формуле изобретения будут сделаны ссылки на ряд терминов, которые должны быть определены имеющими следующие значения.
[0017] Формы единственного числа включают множественные объекты ссылки, если контекст ясно не предписывает иное.
[0018] "Необязательный" или "необязательно" означает, что вслед за этим описанное событие или обстоятельство может произойти или не произойти, и что описание включает случаи, где событие происходит, и случаи, где не происходит.
[0019] Формулировка приблизительности, используемая в описании и формуле изобретения, может применяться, чтобы изменять любое количественное представление, которое допустимо изменять, без того, чтобы это приводило к изменению основной функции, с которой оно связано. Соответственно, значение, изменяемое термином или терминами, такими как "около" и "по существу", не должно быть ограничено указанным точным значением. По меньшей мере в некоторых случаях формулировка приблизительности может соответствовать точности измерительного прибора для измерения величины. Здесь и всюду в описании и формуле изобретения пределы диапазона могут быть объединены и/или поменяны местами, такие диапазоны идентифицируются и включают все поддиапазоны, содержащиеся в них, если контекст или формулировка не указывают иное.
[0020] Частотно-регулируемые электроприводы имеют различные возможности бессенсорного определения и управления в зависимости от конструкции частотно-регулируемого электропривода и приводимого электродвигателя. Тем не менее, частотно-регулируемые электроприводы типично показывают соответствующие регулирующие отклики, когда предоставляются данные о положении ротора от физического датчика, подключенного к электродвигателю или расположенного в нем. В одной или нескольких формах осуществления данного изобретения предлагается контроллер, способный к бессенсорному определению характеристики электродвигателя, такой как положение ротора, и передачи полученной характеристики электродвигателя на частотно-регулируемый электропривод. Частотно-регулируемый электропривод затем реагирует, прикладывая соответствующие регулирующие воздействия (иногда называемые здесь командами регулирующего отклика) к силовому кабелю, соединяющему частотно-регулируемый электропривод с электродвигателем. Таким образом, эффективность эксплуатации электродвигателя не ограничена бессенсорными возможностями определения частотно-регулируемого электропривода, которые могут значительно изменяться. Вместо этого, улучшенная эффективность эксплуатации опирается на контроллер, предлагаемый в данном изобретении как компонент для бессенсорного определения и подачи необходимых данных электродвигателя, на которых основаны команды управления частотно-регулируемым электроприводом, в формате, понимаемом частотно-регулируемым электроприводом.
[0021] В одной или нескольких формах осуществления изобретения контроллер связывается с помощью интерфейса с силовым кабелем (иногда называемым здесь линией электропитания), соединяющим частотно-регулируемый электропривод и электродвигатель. Контроллер использует алгоритмы бессенсорного управления совместно с измерениями тока и/или напряжения, принятыми от силового кабеля, для определения положения ротора. Контроллер затем транслирует эту информацию о положении на частотно-регулируемый электропривод в формате, понимаемом частотно-регулируемым электроприводом. В одной или нескольких формах осуществления изобретения данные о положении ротора транслируются на частотно-регулируемый электропривод в формате, имитирующем выходной сигнал резольвера или энкодера. Во время работы частотно-регулируемый электропривод реагирует, как если бы он приводил в действие электродвигатель, используя датчик положения с обратной связью, когда фактически он является контроллером, который определяет положение ротора и затем действует как "виртуальный энкодер" (или "виртуальный резольвер").
[0022] В одной или нескольких формах осуществления изобретения контроллер содержит один или более датчиков напряжения и тока, сконфигурированных для связи с линией электропитания, и эти датчики обеспечивают измерения напряжения и тока, необходимые для определения положения ротора. Датчики помещены достаточно близко к линии электропитания так, что изменения в токе и напряжении линии легко обнаруживаются. Широкий ассортимент таких датчиков коммерчески доступен и известен специалистам в данной области техники. Подходящие датчики напряжения и тока включают оптические устройства и устройства на эффекте Холла, которые обеспечивают информацию при поддержании гальванической развязки. Датчики напряжения и тока могут быть соединены с другими компонентами контроллера любыми средствами, с помощью которых могут передаваться электрические сигналы, обнаруженные датчиками, например, кабелем для передачи аналогового сигнала, таким как коаксиальный кабель.
[0023] Контроллер содержит модуль интерфейса сигналов, соединенный с датчиками напряжения и тока. Модуль интерфейса сигналов принимает один или более электрических сигналов, связанных с состоянием работы электродвигателя, от одного или более датчиков напряжения и тока. Как правило, состоянием работы, представляющим основной интерес, является положение ротора, хотя другие условия эксплуатации электродвигателя могут быть и обнаруживаемыми и представляющими интерес, например, крутящий момент электродвигателя или магнитный поток в воздушном зазоре. Модуль интерфейса сигналов сконфигурирован для сопоставления сигналов, принятых от датчика напряжения и тока, с положением ротора и для передачи одного или более сигналов, соответствующих положению ротора, на частотно-регулируемый электропривод.
[0024] В одной или нескольких формах осуществления изобретения сопоставление сигналов, принятых от датчиков напряжения и тока, с положением ротора выполняется с использованием одной или нескольких методов "отслеживания противоэлектродвижущей силы" или "оценки противоэлектродвижущей силы". Например, контроллер, функционирующий как виртуальный энкодер, измеряет токи и напряжения линии электропитания, вычисляет разность между оцененным током и фактическим током, чтобы определить напряжение противоэлектродвижущей силы электродвигателя. Напряжение по продольной оси (d-оси) вследствие поля статора тогда корректируется. Так как контроллер предполагает, что магнитное поле проходит вдоль продольной оси независимо от того, что остатки напряжения по продольной оси должны быть вследствие погрешности в угле поворота ротора. Компенсатор тогда применяется, чтобы привести скорректированное напряжение по продольной оси к нулю посредством регулировки угла. Информация об угле поворота ротора затем передается на частотно-регулируемый электропривод как один или более квадратурных выходных сигналов контроллера. Соответствующий пример алгоритма оценки противоэлектродвижущей силы дан в статье S. Morimotto et al, "Sensorless Control Strategy for Salient-Pole PMSM Based on Extended EMF in Rotating Reference Frame," IEEE Trans. Ind. Appl, vol. 38, pp. 1054-1061, 2002. Как правило, способы отслеживания противоэлектродвижущей силы не могут давать информацию о положении ротора при низкой и нулевой скорости, потому что имеется недостаточный сигнал. Чтобы сделать возможным определение положения ротора при низкой и нулевой скорости, контроллер может быть оборудован модулем подачи сигнала, сконфигурированным для подачи одного или более измерительных сигналов в линию электропитания, соединяющую частотно-регулируемый электропривод и электродвигатель. В одной или нескольких формах осуществления изобретения модуль подачи сигнала содержит схему коммутации и емкостный или индуктивный элемент связи с линией электропитания. Возможны различные конфигурации модуля подачи сигнала, и они включают, но не ограничены, конфигурации, позволяющие одно или несколько из следующего: параллельный индуктивный ввод сигнала, последовательный индуктивный ввод сигнала, параллельный емкостной ввод сигнала, последовательный прямой ввод (то есть, без элемента связи) и параллельный прямой ввод, по отдельности или в комбинации. В одной или нескольких дополнительных формах осуществления изобретения модуль подачи сигнала сконфигурирован для прямой подачи измерительного сигнала в линию электропитания.
[0025] Таким образом, в одной или нескольких формах осуществления изобретения модуль подачи сигнала сконфигурирован так, что измерительный сигнал, имеющий известные характеристики напряжения и частоты, может вводиться в линию электропитания с частотой намного большей, чем основная частота электрического тока (и ее гармоники низкого порядка), питающего электродвигатель. Это создает сигнал тока высокой частоты, который может быть измерен, когда часть блока датчиков напряжения и тока связывается с линией электропитания. Индуктивность электродвигателя таким образом может быть вычислена и вследствие явнополюсности электродвигателя может быть получена информация об угле поворота ротора благодаря сопоставлению сигнала тока высокой частоты, принимаемого от электродвигателя, с положением ротора. Контроллер может содержать один или более фильтров для предотвращения влияния на частотно-регулируемый электропривод или связанные с ним компоненты системы измерительных сигналов, вводимых в линию электропитания модулем подачи сигнала контроллера. В одной или нескольких формах осуществления изобретения контроллер содержит по меньшей мере один заградительный фильтр высокой частоты. В одной или нескольких формах осуществления изобретения контроллер содержит множество фильтров высокой частоты, установленных в линии электропитания между модулем подачи сигнала и интерфейсом контроллера с частотно-регулируемым электроприводом или другим компонентом системы. Эта конфигурация гарантирует, что измерительные сигналы напряжения высокой частоты возбуждают токи только в электродвигателе, а не в частотно-регулируемом электроприводе или другом компоненте системы, таком как фильтр нижних частот. Подходящий пример алгоритма на основе высокочастотной подачи дан в статье M.J. Corley and R.D. Lorenz, "Rotor Position and Velocity Estimation for a Salient-Pole Permanent Magnet Synchronous Machine at Standstill and High Speeds, "IEEE Trans. Ind. Appl, vol. 34, pp. 784-789, 1998.
[0026] Как отмечено, в одной или нескольких формах осуществления изобретения контроллер оборудован для вычисления угла поворота ротора и передачи такой информации о положении на частотно-регулируемый электропривод в формате, понимаемым частотно-регулируемым электроприводом. В таких формах осуществления изобретения сам частотно-регулируемый электропривод предварительно запрограммирован так, чтобы реагировать на информацию о положении ротора надлежащим образом для сохранения синхронности между положением ротора и токами статора. Соответствующие форматы сигнала включают сигналы, подобные сигналам резольвера (sin/cos), и сигналы, подобные сигналам энкодера (квадратурные), которые могут передаваться на частотно-регулируемый электропривод через выходной субмодуль интерфейса сигналов. (См., например, элемент, обозначенный 236 и 236а-с на фиг. 2.) Когда информация о положении ротора передается на частотно-регулируемый электропривод как синусоидальный выходной сигнал контроллера, можно сказать, что контроллер имитирует резольвер. Когда информация о положении ротора передается на частотно-регулируемый электропривод как квадратурный выходной сигнал контроллера, можно сказать, что контроллер имитирует энкодер. При таких обстоятельствах частотно-регулируемый электропривод может быть запрограммирован для работы в режиме управления "с замкнутым контуром" или "с обратной связью по сигналам датчика".
[0027] В одной или нескольких формах осуществления контроллер, предлагаемый данным изобретением, может использоваться для управления частотно-регулируемым электроприводом, который не сконфигурирован для применения надлежащих реакций на управляющее воздействие, когда снабжается одними данными положения ротора. При таких обстоятельствах контроллер может быть запрограммирован для передачи команд работы привода, соответствующих данным положения ротора, прямо на частотно-регулируемый электропривод, и контроллер действует по существу как главный контроллер, выполняющий как функцию восприятия положения ротора, так и управления вводом мощности частотно-регулируемым электроприводом в линию электропитания, соединенную с электродвигателем. В одной или нескольких формах осуществления изобретения, в которых контроллер действует по существу как главный контроллер, модуль интерфейса сигналов может содержать один или более выходных субмодулей, сконфигурированных для передачи одного или более аналоговых или цифровых выходных сигналов контроллера на частотно-регулируемый электропривод (см., например, элемент 236с на фиг. 2.)
[0028] Как отмечено, в одной или нескольких формах осуществления данное изобретение предлагает систему, содержащую один или более контроллеров, описанных здесь. Система содержит частотно-регулируемый электропривод, соединенный с помощью линии электропитания с электродвигателем. В одной или нескольких формах осуществления изобретения электродвигатель является электродвигателем с постоянными магнитами. В одной или нескольких дополнительных формах осуществления изобретения электродвигатель является асинхронным электродвигателем. Контроллер взаимодействует с частотно-регулируемым электроприводом и электродвигателем через линию питания и содержит модуль интерфейса сигналов, сконфигурированный так, чтобы принимать один или более электрических сигналов, связанных с состоянием работы электродвигателя, от одного или более датчиков напряжения и тока контроллера. Модуль интерфейса сигналов сконфигурирован для сопоставления принимаемых электрических сигналов с положением ротора электродвигателя и передачи сигналов, соответствующих положению ротора, на частотно-регулируемый электропривод. В одной или нескольких формах осуществления изобретения система включает фильтр и трансформатор, расположенные между частотно-регулируемым электроприводом и контроллером.
[0029] В одной или нескольких формах осуществления система, предлагаемая данным изобретением, используются совместно с погружным насосом с электроприводом, электродвигатель системы является компонентом погружного насоса с электроприводом. В одной или нескольких формах осуществления изобретения механическая энергия подается на погружной насос от электродвигателя с постоянными магнитами, соединенного с частотно-регулируемым электроприводом посредством контроллера. В одной или нескольких дополнительных формах осуществления изобретения механическая энергия подается на погружной насос от асинхронного двигателя, соединенного с частотно-регулируемым электроприводом посредством контроллера.
[0030] В одной или нескольких формах осуществления данное изобретение предлагает способ эксплуатации электродвигателя, питаемого частотно-регулируемым электроприводом. Способ использует один или более новых контроллеров, раскрытых здесь. Таким образом, в одной или нескольких формах осуществления изобретения модуль интерфейса сигналов контроллера принимает один или более электрических сигналов, связанных с состоянием работы электродвигателя, от датчика напряжения и тока контроллера, сопряженного с линией электропитания, соединяющей частотно-регулируемый электропривод с электродвигателем. Модуль интерфейса сигналов тогда сопоставляет один или более электрических сигналов, принимаемых от датчика напряжения и тока, с положением ротора, как подробно описывается здесь, и передает один или более сигналов, соответствующих положению ротора, на частотно-регулируемый электропривод. В ответ на один или более сигналов, принимаемых от контроллера, изменяются один или более параметров режима работы частотно-регулируемого электропривода. Изменения в параметрах режима работы частотно-регулируемого электропривода могут осуществляться самим частотно-регулируемым электроприводом в ответ на прием информации о положении ротора от контроллера, при этом контроллер действует как виртуальный энкодер или виртуальный резольвер. Альтернативно, изменения в параметрах режима работы частотно-регулируемого электропривода могут осуществляться в ответ на команды управления работой частотно-регулируемого электропривода, образующиеся в контроллере. В одной или нескольких формах осуществления изобретения, команды управления работой частотно-регулируемого электропривода принимаются от выходного субмодуля контроллера как один или более цифровых выходных сигналов контроллера. В одной или нескольких формах осуществления способ, предлагаемый данным изобретением, используются для эксплуатации электродвигателя с постоянными магнитами. В одной или нескольких дополнительных формах осуществления способ, предлагаемый данным изобретением, используются для эксплуатации асинхронного двигателя. В еще одном ряде форм осуществления способ, предлагаемый данным изобретением, используется для эксплуатации электродвигателя, сконфигурированного для подачи механической энергии на насос, например, погружной насос с электроприводом.
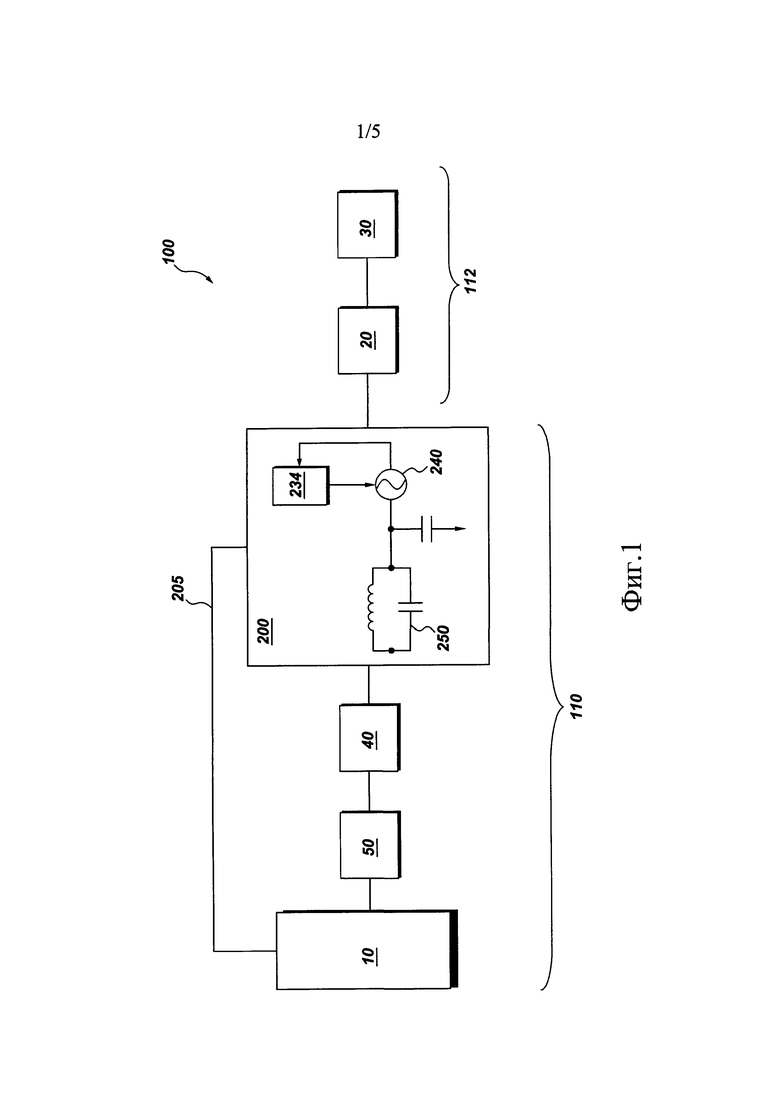
[0031] Обратимся теперь к чертежам, где фиг. 1 поясняет систему 100, предлагаемую данным изобретением, в которой контроллер 200 используется совместно с электродвигателем 30, получающим электропитание от частотно-регулируемого электропривода 10. Контроллер 200 содержит один или более датчиков напряжения и тока (см. элемент 210 на фиг. 2) и интерфейсы с силовым соединением, соединяющим частотно-регулируемый электропривод и электродвигатель. В показанной форме осуществления изобретения цифровой процессор 234 сигналов служит как модуль интерфейса сигналов, который принимает электрические сигналы, связанные с состоянием работы электродвигателя, от одного или более датчиков напряжения и тока контроллера (см. элемент поз.210 на фиг. 2) и сопоставляет принятые электрические сигналы с положением ротора электродвигателя. В показанной форме осуществления изобретения цифровой процессор 234 сигналов также передает сигналы, соответствующие положению ротора, на частотно-регулируемый электропривод через выходной субмодуль модуля интерфейса сигналов и линию 205 передачи сигналов контроллера. Подходящие линии передачи включают кабели, сконфигурированные для передачи аналоговых сигналов, когда контроллер действует как виртуальный энкодер или виртуальный резольвер, и кабели, сконфигурированные для передачи цифровых сигналов, когда вывод из модуля интерфейса сигналов выполняется в цифровой форме. Широкий ассортимент кабелей, несущих аналоговые сигналы, и кабелей, несущих цифровые сигналы, коммерчески доступен и известен специалистам в данной области техники.
Альтернативно, связь между контроллером и частотно-регулируемым электроприводом может быть сделана беспроводной с использованием радиосвязи.
[0032] По-прежнему обращаясь к фиг. 1, в показанной форме осуществления системы контроллер 200 содержит модуль 240 подачи сигнала и связанный с ним заграждающий фильтр 250. Как отмечено, модуль 240 подачи сигнала может использоваться для определения положения ротора при низких или нулевых скоростях вращения ротора. Заграждающий фильтр 250 служит для предотвращения передачи измерительных сигналов контроллера, формируемых модулем подачи сигнала, через силовое соединение в смежные компоненты системы, такие как трансформатор 40, фильтр 50 нижних частот и частотно-регулируемый электропривод 10. В одной или нескольких формах осуществления изобретения частотно-регулируемый электропривод, фильтр нижних частот и контроллер упоминаются как поверхностная электрическая сеть, обозначенная как элемент поз.110 в форме осуществления изобретения, показанной на фиг. 1. При таких обстоятельствах силовой кабель 20 и электродвигатель 30 могут упоминаться как подземная электрическая сеть, обозначенная как элемент поз. 112 в форме осуществления изобретения, показанной на фиг. 1.
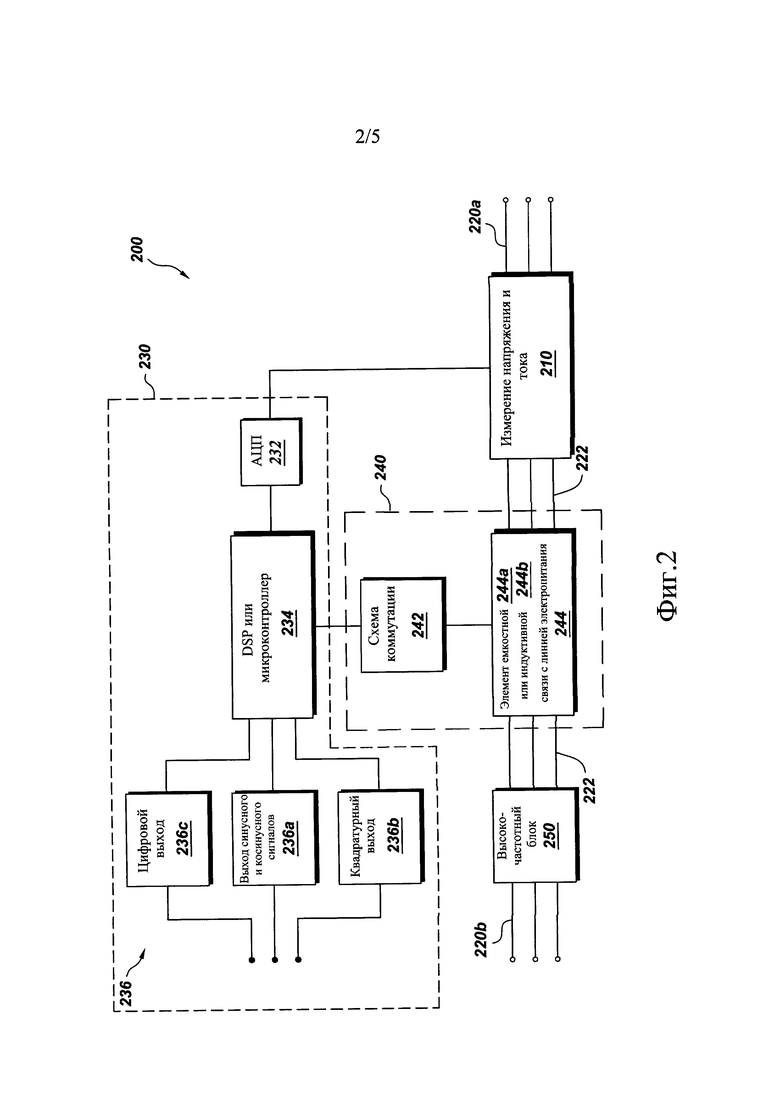
[0033] Обратимся теперь к фиг. 2, которая иллюстрирует одну или несколько форм осуществления контроллера 200, предлагаемых данным изобретением. В показанной форме осуществления контроллер сконфигурирован для связи с линией электропитания через электрический интерфейс 220а и с частотно-регулируемым электроприводом через электрический интерфейс 220b и служит как электрическое соединение между частотно-регулируемым электроприводом и связанными с ним компонентами системы с одной стороны и электродвигателем, получающим электропитание от частотно-регулируемого электропривода, с другой. Один или более датчиков 210 напряжения и/или тока присоединены к кабелю 222 передачи энергии контроллера, который проходит от интерфейса 220b на стороне частотно-регулируемого электропривода контроллера до интерфейса 220а на стороне электродвигателя контроллера. Датчик 210 напряжения и/или тока определяет напряжения и токи линии, связанные с состоянием работы электродвигателя. Как отмечено, эти электрические сигналы могут включать характеристику напряжений противоэлектродвижущей силы от положения ротора, и сигналы тока высокой частоты, возникающие вследствие вводимых контроллером одного или более измерительных сигналов. Как отмечено, эти сигналы тока высокой частоты, могут быть измерены датчиком 210 напряжения и тока, и такие сигналы могут использоваться цифровым процессором 234 сигналов контроллера, чтобы вычислять информацию об индуктивности электродвигателя и угле поворота ротора.
[0034] По-прежнему обращаясь к фиг. 2, контроллер содержит модуль 230 интерфейса сигналов, содержащий вышеупомянутый цифровой процессор 234 сигналов. В одной или нескольких формах осуществления изобретения процессор сигналов служит в качестве микроконтроллера. Во время работы электрические сигналы, связанные с одним или несколькими состояниями электродвигателя, включая положение ротора, передаются через аналого-цифровой преобразователь 232 на процессор 234 сигналов. Цифровой процессор сигналов соединен с субмодулем 236 вывода сигналов. В показанной форме осуществления изобретения субмодуль 236 вывода содержит блоки 236а, 236b и 236 с вывода сигналов, которые сконфигурированы для передачи синусоидальных выходных сигналов контроллера, квадратурных выходных сигналов контроллера и цифровых выходных сигналов контроллера, соответственно, к органам регулирования частотно-регулируемого электропривода через одну или несколько линий передачи сигналов. (См., например, элемент поз. 205 на фиг. 1.) В одной или нескольких формах осуществления изобретения контроллер содержит один или более блоков 236а-236с вывода сигналов. Например, в одной или нескольких формах осуществления контроллер, предлагаемый данным изобретением, может содержать только блоки 236а вывода сигналов и не содержать блоки выводов сигналов типов 236b и 236с. В одной или нескольких дополнительных формах осуществления контроллер, предлагаемый данным изобретением, может содержать только блоки 236b вывода сигналов и не содержать блоки вывода сигналов типов 236а и 236с. В еще одном ряде форм осуществления изобретения присутствуют блоки вывода сигналов всех трех типов. Как отмечено, синусоидальные выходные сигналы контроллера и квадратурные выходные сигналы контроллера могут содержать данные о положении ротора, которые могут обрабатываться прямо частотно-регулируемым электроприводом и запускать соответствующие реакции на управляющие сигналы. Точно так же цифровые выходные сигналы контроллера, переданные блоком 236с сигнала, могут содержать данные о положении ротора в цифровом формате, или команды частотно-регулируемого электропривода в цифровом формате, как тогда, когда контроллер функционирует как главный контроллер.
[0035] По-прежнему обращаясь к фиг. 2, контроллер 200 содержит модуль 240 подачи сигнала, включающий схему 242 коммутации и схему 244 связи с линией электропитания. Во время работы измерительный сигнал, генерируемый цифровым процессором 234 сигналов, передается через схему 242 коммутации на схему 244 связи с линией электропитания, которая вводит измерительный сигнал в кабель 222 подачи энергии контроллера, и через интерфейс 220а линии электропитания и линию 20 питания (см. поз.20 на фиг. 1) к электродвигателю, приводимому в действие частотно-регулируемым электроприводом. В одной или нескольких формах осуществления изобретения схема 244 связи с линией электропитания осуществляет емкостную связь (244а). В одной или нескольких дополнительных формах осуществления изобретения схема 244 связи с линией электропитания осуществляет индуктивную связь (244b). В еще одном ряде форм осуществления изобретения схема 244 связи с линией электропитания способна осуществлять и емкостную и индуктивную связь с кабелем 222 передачи контроллера. Схема 250 блокирования сигнала высокой частоты предотвращает поступление измерительного сигнала в частотно-регулируемый электропривод или связанные с ним компоненты через интерфейс 220b питания частотно-регулируемого электропривода. В одной или нескольких формах осуществления изобретения схема 250 блокирования сигнала высокой частоты выполнена в виде заграждающего фильтра. Следует отметить, что не все контроллеры, предусматриваемые данным изобретением, требуют модуль подачи сигнала, но такие функциональные возможности улучшают универсальность контроллера.
[0036] В одной или нескольких формах осуществления изобретения модуль 240 подачи сигнала сконфигурирован для одного или более из следующего: параллельной индуктивной подачи сигнала, последовательной индуктивной подачи сигнала, параллельной емкостной подачи сигнала, прямой последовательной подачи сигнала и прямой параллельной подачи сигнала по отдельности или в комбинации. Фиг. 3-7 иллюстрируют выбранные формы осуществления изобретения.
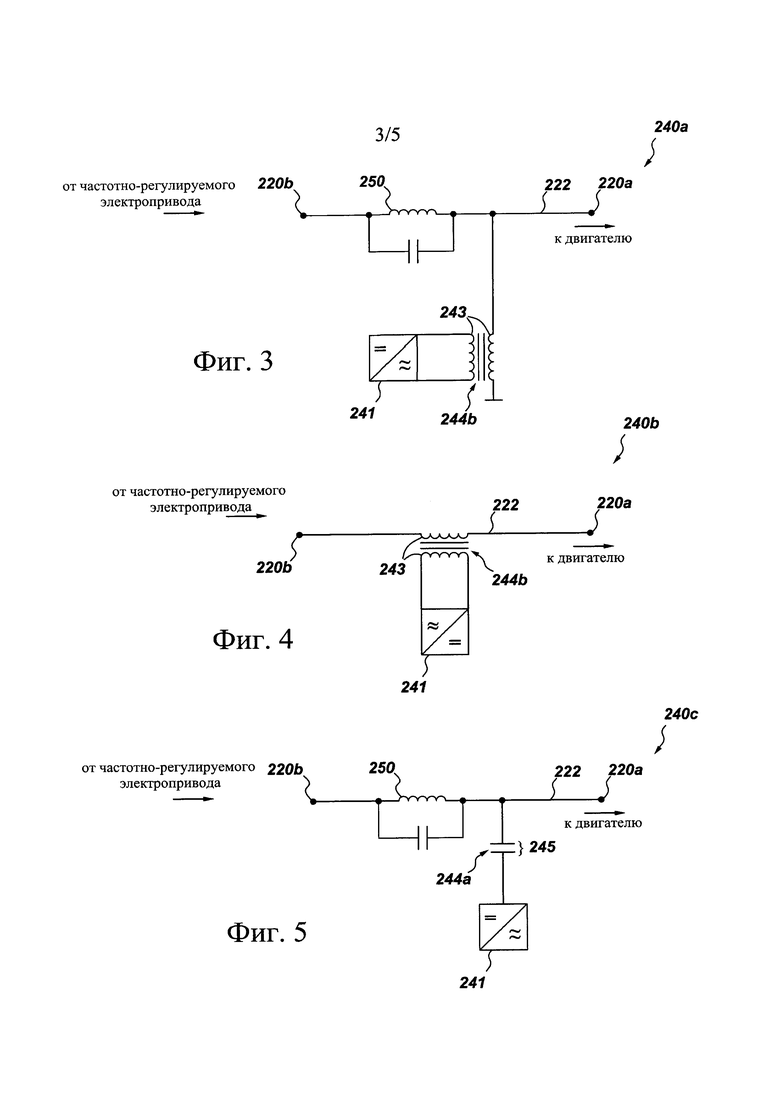
[0037] На фиг. 3 представлена часть модуля 240а подачи сигнала, сконфигурированного для параллельного индуктивного ввода. В показанной форме осуществления изобретения источник 241 напряжения соединен с кабелем 222 передачи контроллера с помощью катушек 243 индуктивности, которые создают индуктивную связь 244b между модулем подачи сигнала и кабелем 222 передачи энергии контроллера. Заграждающий фильтр 250 предотвращает попадание подаваемых сигналов в частотно-регулируемый электропривод через интерфейс 220b.
[0038] На фиг. 4 представлена часть модуля 240b подачи сигнала, сконфигурированного для последовательного индуктивного ввода. В показанной форме осуществления изобретения источник 241 напряжения соединен с кабелем 222 передачи контроллера с помощью катушек 243 индуктивности, которые создают индуктивную связь 244b между модулем подачи сигнала и кабелем 222 передачи энергии контроллера.
[0039] На фиг. 5 представлена часть модуля 240с подачи сигнала, сконфигурированного для параллельного емкостного ввода. В показанной форме осуществления изобретения источник 241 напряжения соединен с кабелем 222 передачи контроллера с помощью конденсатора 245, создающего емкостную связь 244а между модулем подачи сигнала и кабелем 222 передачи энергии контроллера.
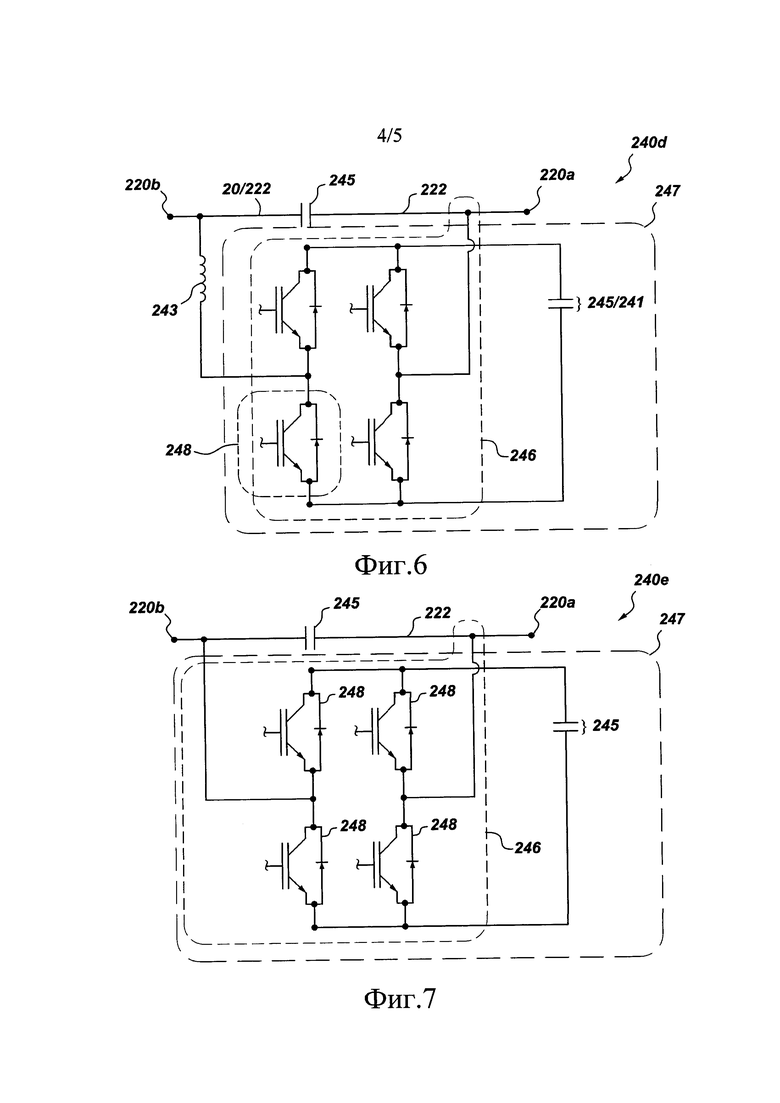
[0040] На фиг. 6 представлен модуль 240d подачи сигнала, сконфигурированный для прямого (кондуктивного) последовательного ввода измерительного сигнала в кабель 222 передачи. В показанной форме осуществления изобретения модуль подачи сигнала включает электрическую схему 246 непосредственного ввода и электрическую схему 247 накопления энергии и соединен непосредственно с кабелем 222 передачи контроллера. Необязательные фильтрирующие элементы - катушка 243 индуктивности и конденсатор 245 кабельной линии передачи, препятствуют высокочастотным помехам переключения передаваться в кабель 222 передачи. Второй конденсатор 245 является компонентом электрической схемы 247 накопления энергии и служит источником электрической энергии для ввода сигнала посредством схемы 246 подачи сигнала. В показанной форме осуществления изобретения биполярные транзисторы 248 с изолированным затвором (Insulated Gate Bipolar Transistors, IGBTs) предусматриваются для управления напряжением и частотой измерительного сигнала.
[0041] На фиг. 7 представлена разновидность модуля подачи сигнала, показанного на фиг. 6. В показанной форме осуществления модуль 240е подачи сигнала сконфигурирован для прямой последовательной подачи измерительного сигнала в кабель 222 передачи, но не имеет фильтрующее элемента - катушки индуктивности, показанной на фиг. 6. Модуль 240е подачи сигнала включает электрическую схему 246 непосредственного ввода и электрическую схему 247 накопления энергии и соединен прямо с кабелем 222 передачи контроллера. Необязательные фильтрирующие элементы включают только конденсатор 245 кабельной линии передачи. Второй конденсатор 245 является компонентом электрической схемы 247 накопления энергии и служит источником электрической энергии для ввода сигнала посредством электрической схемы 246 подачи сигнала. В показанной форме осуществления изобретения множество транзисторов IGBTs 248 предусмотрено для управления напряжением и частотой измерительного сигнала.
[0042] На фиг. 8 представлена система и способ 300, предлагаемые данным изобретением, для добычи геологического флюида 302 из геологического пласта 301. Геологический флюид может быть любым полезным геологическим флюидным ресурсом, например, горячим флюидом, таким как пар, вода или смесь пара и жидкой фазы воды, извлекаемая из месторождения геотермальных вод. В одной или нескольких формах осуществления изобретения геологический флюид является флюидом, содержащим углеводородный флюид из коллектора углеводородов, например, многофазным флюидом, состоящим из газообразных и жидких углеводородов.
[0043] В форме осуществления изобретения, показанной на фиг. 8, комбинация 320 насоса с электродвигателем расположена в стволе 303 скважины, обсаженной обсадной колонной 306. Ствол скважины и обсадная колонна проникают в продуктивную зону геологического коллектора 301. В продуктивной зоне обсадная колонна перфорирована, что позволяет геологическому флюиду поступать в ствол скважины. В показанной форме осуществления геологический флюид 302 поднимается секцией 322 насоса через трубопровод 304 нагнетания флюида на поверхностное оборудование 314 для хранения. В одной или нескольких формах осуществления изобретения комбинация 320 насос-электродвигатель представляет собой погружной насос с приводом от электродвигателя с постоянными магнитами. В ряде дополнительных форм осуществления изобретения погружной насос с электроприводом включает асинхронный электродвигатель. В показанной форме осуществления изобретения электродвигатель получает энергию от частотно-регулируемого электропривода (VFD) 10 с помощью силового кабеля 20. Частотно-регулируемый электропривод и связанные с ним компоненты - фильтр 50 нижних частот и трансформатор 40, вместе с контроллером 200, предлагаемые данным изобретением, составляют поверхностную электрическую сеть 310, соединенную с погружным насосом с электроприводом через силовой кабель 20.
[0044] Вышеприведенные примеры являются просто иллюстративными, используемыми для пояснения только некоторых из признаков изобретения. Хотя фигуры иллюстрируют в основном однофазные системы переменного тока, многофазные систем также входят в объем изобретения. Прилагаемая формула изобретения характеризует изобретение так широко, как оно было задумано, а представленные здесь примеры являются иллюстративными формами осуществления, выбранными из многообразия всех возможных форм осуществления изобретения. Соответственно, прилагаемая формула изобретения не ограничена выбором примеров, используемых для пояснения признаков данного изобретения. Используемое в формуле изобретения слово "содержит" и его грамматические варианты логически также подразумевают, например, но не ограничиваясь этим, "состоящий по существу из" и "состоящий из". Где необходимо, были заданы диапазоны, эти диапазоны являются включающими все поддиапазоны между ними. Следует ожидать, что изменения в этих диапазонах будут очевидны среднему специалисту в данной области техники и, если они уже не стали известными, эти изменения должны, где возможно, рассматриваться как охваченные прилагаемой формулой изобретения. Также ожидается, что прогресс в науке и технике сделает возможными эквиваленты и замены, которые в настоящее время не охвачены из-за неточности формулировок, и эти изменения также должны рассматриваться, где возможно, как охваченные прилагаемой формулой изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления грузопассажирским лифтом | 2022 |
|
RU2791781C1 |
| УСТРОЙСТВО ДЛЯ ПИТАНИЯ ВЕНТИЛЬНО-ИНДУКТОРНОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2007 |
|
RU2368059C2 |
| Система и способ векторного управления электродвигателем с постоянными магнитами | 2020 |
|
RU2760227C1 |
| СПОСОБ УПРАВЛЕНИЯ УСТАНОВКОЙ ИЛИ ЭЛЕКТРИЧЕСКОЙ НАГРУЗКОЙ, НА КОТОРУЮ ПОДАЕТСЯ ЭЛЕКТРОЭНЕРГИЯ ПО ПРОТЯЖЕННОЙ ЛИНИИ ПЕРЕДАЧИ | 2010 |
|
RU2550143C2 |
| Инвертор транспортного исполнения | 2022 |
|
RU2788306C1 |
| Корпус электропривода трубопроводной арматуры и электропривод трубопроводной арматуры | 2024 |
|
RU2835273C1 |
| СИСТЕМА И СПОСОБ ОПРЕДЕЛЕНИЯ МОМЕНТА ДОСТИЖЕНИЯ ЛИНЕЙНЫМ ДВИГАТЕЛЕМ КОНЦЕВЫХ УПОРОВ | 2016 |
|
RU2652266C2 |
| РЕГУЛИРУЕМЫЙ ЭЛЕКТРОПРИВОД ГОРНОГО КОМБАЙНА | 2001 |
|
RU2204715C1 |
| ИСПОЛНИТЕЛЬНЫЙ МЕХАНИЗМ СИСТЕМЫ УПРАВЛЕНИЯ | 2015 |
|
RU2601368C1 |
| ИНТЕЛЛЕКТУАЛЬНАЯ СИСТЕМА УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ ТРУБОПРОВОДНОЙ АРМАТУРЫ | 2021 |
|
RU2780757C1 |
Изобретение относится к области электротехники и касается усовершенствованного управления электродвигателем, соединенного во время работы с частотно-регулируемым электроприводом. Предлагается контроллер, который сопряжен с частотно-регулируемым электроприводом и электродвигателем, причем контроллер имеет (а) один или более датчиков напряжения и тока, которые связаны с линией электропитания, соединяющей частотно-регулируемый электропривод и электродвигатель; и (b) модуль интерфейса сигналов, который может принимать электрические сигналы, связанные с состоянием работы электродвигателя, от одного или более датчиков напряжения и тока. Модуль интерфейса сигналов может сопоставлять принятые электрические сигналы с положением ротора электродвигателя и передавать сигналы, соответствующие положению ротора, на частотно-регулируемый электропривод. Данные, предоставляемые контроллером, если передаются как положение ротора, могут заставлять частотно-регулируемый электропривод изменять один или более его параметров режима работы, чтобы поддерживать надлежащую синхронизацию ротора и связанных с ним токов статора. Альтернативно, контроллер может прямо регулировать параметры режима работы частотно-регулируемого электропривода. 3 н. и 23 з.п. ф-лы, 8 ил.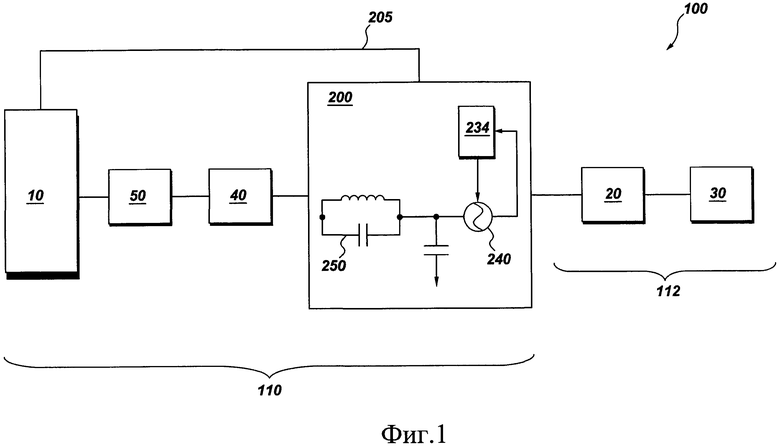
1. Контроллер, сконфигурированный для сопряжения с частотно-регулируемым электроприводом и электродвигателем и содержащий:
(a) один или более датчиков напряжения и тока, сконфигурированных для связи с линией электропитания, соединяющей частотно-регулируемый электропривод и электродвигатель; и
(b) модуль интерфейса сигналов, сконфигурированный для приема одного или более электрических сигналов, связанных с состоянием работы электродвигателя, от одного или более датчиков напряжения и тока, причем модуль интерфейса сигналов сконфигурирован для сопоставления принимаемых электрических сигналов с положением ротора электродвигателя и передачи сигналов, соответствующих положению ротора, или команд управления работой на частотно-регулируемый электропривод.
2. Контроллер по п. 1, в котором электродвигатель является электродвигателем с постоянными магнитами.
3. Контроллер по п. 1, в котором электродвигатель является асинхронным электродвигателем.
4. Контроллер по п. 1, в котором модуль интерфейса сигналов сконфигурирован для формирования одного или более синусоидальных выходных сигналов контроллера.
5. Контроллер по п. 1, в котором модуль интерфейса сигналов сконфигурирован для формирования одного или более квадратурных выходных сигналов контроллера.
6. Контроллер по п. 1, в котором модуль интерфейса сигналов содержит аналого-цифровой преобразователь и сконфигурирован для формирования одного или более цифровых выходных сигналов контроллера.
7. Контроллер по п. 1, дополнительно содержащий модуль подачи сигнала, сконфигурированный для ввода измерительного сигнала в линию электропитания, соединяющую частотно-регулируемый электропривод и электродвигатель.
8. Контроллер по п. 7, в котором модуль подачи сигнала содержит схему коммутации и элемент для прямой, емкостной или индуктивной связи с линией электропитания.
9. Контроллер по п. 7, в котором модуль подачи сигнала сконфигурирован для одного или более из следующего: прямого последовательного ввода, прямого параллельного ввода, параллельного индуктивного ввода сигнала, последовательного индуктивного ввода сигнала и параллельного емкостного ввода сигнала, по отдельности или в комбинации.
10. Контроллер по п. 9, дополнительно содержащий по меньшей мере один фильтр, сконфигурированный для предотвращения передачи введенных сигналов на частотно-регулируемый электропривод.
11. Контроллер по п. 9, содержащий по меньшей мере один заграждающий фильтр.
12. Контроллер по п. 1, в котором сигнал, передаваемый модулем интерфейса сигналов на частотно-регулируемый электропривод, содержит данные о положении ротора.
13. Контроллер по п. 1, в котором сигнал, передаваемый модулем интерфейса сигналов на частотно-регулируемый электропривод, содержит команды управления работой частотно-регулируемого электропривода.
14. Система привода для электродвигателя, содержащая: частотно-регулируемый электропривод, соединенный с помощью линии электропитания с электродвигателем; и контроллер, сопряженный с частотно-регулируемым электроприводом и электродвигателем, причем контроллер содержит:
(a) один или более датчиков напряжения и тока, связанных с линией электропитания, соединяющей частотно-регулируемый электропривод и электродвигатель;
(b) модуль интерфейса сигналов, сконфигурированный для приема одного или более электрических сигналов, связанных с состоянием работы электродвигателя, от одного или более датчиков напряжения и тока, причем модуль интерфейса сигналов сконфигурирован для сопоставления принимаемых электрических сигналов с положением ротора электродвигателя, и передачи сигналов, соответствующих положению ротора, или команд управления работой на частотно-регулируемый электропривод.
15. Система по п. 14, в которой электродвигатель является электродвигателем с постоянными магнитами.
16. Система по п. 14, в которой электродвигатель является асинхронным электродвигателем.
17. Система по п. 14, в которой электродвигатель является компонентом погружного насоса с электроприводом.
18. Система по п. 14, дополнительно содержащая фильтр и трансформатор, расположенные между частотно-регулируемым электроприводом и контроллером.
19. Система по п. 14, в которой контроллер дополнительно содержит модуль подачи сигнала, сконфигурированный для ввода измерительного сигнала в линию электропитания, соединяющую частотно-регулируемый электропривод и электродвигатель.
20. Система по п. 14, в которой сигнал, передаваемый модулем интерфейса сигналов на частотно-регулируемый электропривод, содержит данные о положении ротора.
21. Система по п. 14, в которой сигнал, передаваемый модулем интерфейса сигналов на частотно-регулируемый электропривод, содержит команды управления работой частотно-регулируемого электропривода.
22. Способ работы электродвигателя, приводимого в действие частотно-регулируемым электроприводом, включающий:
(a) прием в модуле интерфейса сигналов контроллера, сопряженного с частотно-регулируемым электроприводом и электродвигателем, одного или более электрических сигналов, связанных с состоянием работы электродвигателя, от одного или более датчиков напряжения и тока линии электропитания, связанных с линией электропитания, соединяющей частотно-регулируемый электропривод и электродвигатель, причем модуль интерфейса сигналов сконфигурирован для сопоставления принимаемых электрических сигналов с положением ротора электродвигателя и передачи сигналов, соответствующих положению ротора, или команд управления работой частотно-регулируемого электропривода на частотно-регулируемый электропривод; и
(b) изменение одного или более параметров режима работы частотно-регулируемого электропривода в ответ на сигнал, переданный контроллером на частотно-регулируемый электропривод.
23. Способ по п. 22, в котором электродвигатель является электродвигателем с постоянными магнитами.
24. Способ по п. 22, в котором электродвигатель является асинхронным электродвигателем.
25. Способ по п. 22, в котором электродвигатель является компонентом погружного насоса с электроприводом.
26. Способ по п. 25, в котором погружной насос с электроприводом предназначен для добычи углеводородного флюида.
| US2011012544 A1, 20.01.2011 US 2004052217 A1, 18.03.2004 US 2014361715 A1, 11.12.2014 EP 2709263 A1, 19.03.2014 US 2011050144 A1, 03.03.2011 RU 2428784 C1, 10.09.2011 . |

