ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
[0001] Настоящее изобретение относится к транспортным системам и, более конкретно, к системам и способам, которые обнаруживают опасные ветровые условия рядом с транспортным средством.
УРОВЕНЬ ТЕХНИКИ
[0002] Автомобили и другие транспортные средства обеспечивают значительную долю перевозок для коммерческих, правительственных и частных организаций. Транспортные средства, такие как автономные транспортные средства, движутся по дорогам, которые могут испытывать структурное разрушение и другие проблемы, которые подвергают транспортные средства, и их пассажиров, риску. В некоторых ситуациях транспортное средство может быть подвержено риску в условиях движения, когда присутствуют сильные ветровые условия, такие как боковые ветра и условия сдвига ветра. Например, сильный боковой ветер или сдвиг ветра может выталкивать транспортное средство с дороги или на другое транспортное средство на соседней полосе движения, тем самым, вызывая аварию. В отдельных ситуациях сильные ветровые условия могут вынуждать транспортное средство опрокидываться на проезжей части. Раннее обнаружение сильных ветровых условий дает транспортному средству время, чтобы предпринимать действие, чтобы устранять или смягчать воздействие ветра.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Согласно одному аспекту предложен способ, содержащий этапы, на которых:
принимают данные от установленного в транспортном средстве датчика;
определяют, посредством системы обнаружения ветра, идентифицированы ли взвешенные в воздухе частицы в принятых данных; и
в ответ на определение того, что взвешенные в воздухе частицы идентифицированы в принятых данных:
определяют скорость ветра и направление ветра на основе движения взвешенных в воздухе частиц; и
определяют, посредством системы обнаружения ветра, оптимальное действие, чтобы избегать или смягчать воздействие ветра.
Опционально, установленный в транспортном средстве датчик включает в себя один или более из лидарного датчика, радиолокационного датчика и камеры.
Способ дополнительно может содержать этап, на котором реализуют оптимальное действие, чтобы избегать или смягчать воздействие ветра.
Способ дополнительно может содержать этап, на котором сообщают скорость ветра, направление ветра и оптимальное действие другим ближайшим транспортным средствам.
Способ дополнительно может содержать этап, на котором сообщают скорость ветра, направление ветра и оптимальное действие системе на основе инфраструктуры.
Опционально, установленный в транспортном средстве датчик является лидарной системой.
Опционально, установленный в транспортном средстве датчик включает в себя одну или более из лидарной системы, радиолокационной системы и системы камеры.
Опционально, взвешенные в воздухе частицы включают в себя одно или более из частиц грязи, частиц растительности, частиц мусора и небольших объектов.
Опционально, оптимальное действие, чтобы избегать или смягчать воздействие ветра, включает в себя, по меньшей мере, одно из уменьшения скорости транспортного средства, парковки транспортного средства рядом с естественными защитами от ветра, маневрирования транспортного средства близко к созданным человеком защитам от ветра и позиционирования транспортного средства обращенным к ветру.
Способ дополнительно может содержать этап, на котором формируют звуковые или визуальные предупреждения, касающиеся ветровых условий.
Способ дополнительно может содержать этап, на котором формируют звуковые или визуальные инструкции вождения, чтобы осуществлять маневрирование транспортного средства, чтобы избегать или смягчать воздействие ветра.
Опционально, транспортное средство является автономным транспортным средством.
Согласно второму аспекту предложен способ, содержащий этапы, на которых:
принимают, посредством системы обнаружения ветра, данные датчика от датчика, установленного на транспортное средство;
принимают, посредством системы обнаружения ветра, картографические данные, ассоциированные с текущим географическим местоположением транспортного средства;
принимают, посредством системы обнаружения ветра, метеорологические данные, ассоциированные с текущим географическим местоположением транспортного средства;
определяют, посредством системы обнаружения ветра, ветровое условие рядом с транспортным средством на основе данных датчика, картографических данных и метеорологических данных; и
в ответ на определение того, что ветровое условие рядом с транспортным средством является суровым, определяют, посредством системы обнаружения ветра, оптимальное действие, чтобы избегать или смягчать воздействие ветра.
Опционально, датчик, установленный на транспортное средство, включает в себя, по меньшей мере, одно из лидарного датчика, радиолокационного датчика и камеры.
Опционально, оптимальное действие, чтобы избегать или смягчать воздействие ветра, включает в себя, по меньшей мере, одно из уменьшения скорости транспортного средства, парковки транспортного средства рядом с естественными защитами от ветра, маневрирования транспортного средства близко к созданным человеком защитам от ветра и позиционирования транспортного средства обращенным к ветру.
Способ дополнительно может содержать этап, на котором формируют звуковые или визуальные предупреждения, касающиеся ветровых условий.
Способ дополнительно может содержать этап, на котором сообщают ветровые условия другим ближайшим транспортным средствам.
Опционально, транспортное средство является автономным транспортным средством.
Согласно третьему аспекту предложено устройство, содержащее:
датчик, установленный на транспортное средство и сконфигурированный с возможностью захватывать данные датчика; и
систему обнаружения ветра, соединенную с датчиком и сконфигурированную с возможностью принимать и анализировать данные датчика, чтобы идентифицировать взвешенные в воздухе частицы рядом с транспортным средством, причем система обнаружения ветра дополнительно сконфигурирована, в ответ на идентификацию взвешенных в воздухе частиц, с возможностью:
определять скорость ветра и направление ветра на основе движения взвешенных в воздухе частиц; и
определять оптимальное действие, чтобы избегать или смягчать воздействие ветра.
Опционально, множество датчиков включают в себя один или более из лидарного датчика, радиолокационного датчика и камеры.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0003] Неограничивающие и неисчерпывающие варианты осуществления настоящего изобретения описываются со ссылкой на последующие чертежи, на которых одинаковые ссылочные позиции ссылаются на одинаковые части на всех различных чертежах, пока не указано иное.
[0004] Фиг. 1 - это блок-схема, иллюстрирующая вариант осуществления системы управления транспортным средством, которая включает в себя систему обнаружения ветра.
[0005] Фиг. 2 - это блок-схема, иллюстрирующая вариант осуществления системы обнаружения ветра.
[0006] Фиг. 3 иллюстрирует вариант осуществления проезжей части с множеством транспортных средств, движущихся в одинаковом направлении.
[0007] Фиг. 4 иллюстрирует вариант осуществления способа для обнаружения опасных ветровых условий.
[0008] Фиг. 5 иллюстрирует другой вариант осуществления способа для обнаружения опасных ветровых условий.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
[0009] Последующее раскрытие обращается к сопровождающим чертежам, которые формируют его часть, и на которых показаны в качестве иллюстрации конкретные реализации, в которых изобретение может быть применено на практике. Следует понимать, что могут использоваться другие реализации, и могут вноситься структурные изменения без отступления от объема настоящего раскрытия. Ссылки в описании на "один вариант осуществления", "вариант осуществления", "примерный вариант осуществления" и т.д. указывают, что описанный вариант осуществления может включать в себя конкретный признак, структуру или характеристику, но каждый вариант осуществления может необязательно включать в себя конкретный признак, структуру или характеристику. Кроме того, такие фразы необязательно ссылаются на один и тот же вариант осуществления. Дополнительно, когда конкретный признак, структура или характеристика описывается в соединении с вариантом осуществления, представляется, что он находится в рамках знания специалистов в родственной области(ях) техники, чтобы реализовывать такой признак, структуру или характеристику в соединении с другими вариантами осуществления, явно или неявно описанными.
[0010] Реализации систем, устройств и способов, раскрытых в данном документе, могут содержать или использовать специализированный компьютер или компьютер общего назначения, включающий в себя аппаратные средства компьютера, такие как, например, один или более процессоров и системная память, которые обсуждаются в данном документе. Реализации в области применения настоящего изобретения могут также включать в себя физические или другие машиночитаемые носители для передачи или хранения компьютерно-исполняемых инструкций и/или структур данных. Такими машиночитаемыми носителями могу быть любые доступные носители, к которым можно осуществлять доступ посредством компьютерной системы общего назначения или специализированной компьютерной системы. Машиночитаемые носители, которые хранят компьютерно-исполняемые инструкции, являются компьютерными носителями (устройствами) хранения. Машиночитаемые носители, которые переносят компьютерно-исполняемые инструкции, являются средой передачи. Таким образом, в качестве примера, но не ограничения, реализации изобретения могут содержать, по меньшей мере, два определенно разных вида машиночитаемых носителей: компьютерные носители (устройства) хранения и среду передачи.
[0011] Компьютерные носители (устройства) хранения включают в себя RAM, ROM, EEPROM, CD-ROM, твердотельные накопители ("SSD") (например, на основе RAM), флэш-память, память с фазовым переходом ("PCM"), другие типы памяти, другой накопитель на оптическом диске, накопитель на магнитном диске или другие магнитные запоминающие устройства или любой другой носитель, который может использоваться, чтобы хранить желаемое средство кодирования программы в форме компьютерно-исполняемых инструкций или структур данных, и к которому может обращаться компьютер общего назначения или специализированный компьютер.
[0012] Реализация устройств, систем и способов, раскрытых в данном документе, может передаваться через компьютерную сеть. "Сеть" определена как одна или более линий передачи данных, которые предоставляют возможность передачи электронных данных между компьютерными системами и/или модулями и/или другими электронными устройствами. Когда информация передается или предоставляется по сети или другому коммуникационному соединению (либо проводному, беспроводному, либо комбинации проводного или беспроводного) в компьютер, компьютер надлежащим образом рассматривает соединение как среду передачи. Среда передачи может включать в себя сеть и/или линии передачи данных, которые могут использоваться, чтобы переносить желаемое средство кодирования программы в форме компьютерно-исполняемых инструкций или структур данных, и к которым может обращаться компьютер общего назначения или специализированный компьютер. Комбинации вышеперечисленного также следует включить в число машиночитаемых носителей.
[0013] Компьютерно-исполняемые инструкции содержат, например, инструкции и данные, которые, когда выполняются в процессоре, инструктируют компьютеру общего назначения, специализированному компьютеру или специализированному устройству обработки выполнять определенную функцию или группу функций. Компьютерно-исполняемые инструкции могут быть, например, двоичным кодом, инструкциями промежуточного формата, такими как на языке ассемблера, или даже исходным кодом. Хотя предмет изобретения описан на языке, характерном для структурных признаков и/или методологических действий, следует понимать, что предмет изобретения, заданный в прилагаемой формуле изобретения, необязательно ограничен описанными признаками или действиями, описанными в данном документе. Скорее, описанные признаки и действия раскрыты как примерные формы реализации формулы изобретения.
[0014] Специалисты в данной области техники поймут, что изобретение может быть применено на практике в сетевых вычислительных окружениях со многими типами конфигураций компьютерной системы, включающими в себя бортовой компьютер транспортного средства, персональные компьютеры, настольные компьютеры, портативные компьютеры, процессоры для обработки сообщений, карманные устройства, многопроцессорные системы, микропроцессорную или программируемую бытовую электронную аппаратуру, сетевые ПК, миникомпьютеры, мейнфреймы, мобильные телефоны, PDA, планшеты, пейджеры, маршрутизаторы, коммутаторы, различные запоминающие устройства и т.п. Изобретение также может быть применено на практике в распределенных системных окружениях, где локальная и удаленная компьютерные системы, которые связаны (либо проводными линиями передачи данных, беспроводными линиями передачи данных, либо комбинацией проводных и беспроводных линий передачи данных) через сеть, обе выполняют задачи. В распределенном системном окружении программные модули могут размещаться как на локальных, так и на вытесненных запоминающих устройствах.
[0015] Дополнительно, когда это целесообразно, функции, описанные в данном документе, могут быть выполнены в одном или более из следующего: аппаратные средства, программное обеспечение, программно-аппаратные средства, цифровые компоненты или аналоговые компоненты. Например, одна или более специализированных интегральных микросхем (ASIC) могут быть запрограммированы, чтобы выполнять одну или более из систем и процедур, описанных в данном документе. Некоторые термины используются по всему последующему описанию и в формуле изобретения, чтобы ссылаться на конкретные компоненты системы. Как поймет специалист в области техники, компоненты могут называться различными названиями. Этот документ не предназначен, чтобы делать различие между компонентами, которые отличаются по названию, но не по функции.
[0016] Должно быть отмечено, что варианты осуществления датчиков, обсуждаемые в данном документе, могут содержать компьютерные аппаратные средства, программное обеспечение, программно-аппаратные средства или любую комбинацию их, чтобы выполнять, по меньшей мере, часть их функций. Например, датчик может включать в себя компьютерный код, сконфигурированный с возможностью исполняться в одном или более процессорах, и может включать в себя аппаратную логику/электрические схемы, управляемые посредством компьютерного кода. Эти примерные устройства предоставляются в данном документе в целях иллюстрации и не предназначены быть ограничивающими. Варианты осуществления настоящего изобретения могут быть реализованы в дополнительных типах устройств, которые будут известны специалистам в соответствующей области(ях) техники.
[0017] По меньшей мере, некоторые варианты осуществления изобретения направлены на компьютерные программные продукты, содержащие такую логику (например, в форме программного обеспечения), сохраненные на любом компьютерно-используемом носителе. Такое программное обеспечение, когда исполняется в одном или более устройствах обработки данных, инструктирует устройству работать, как описано в данном документе.
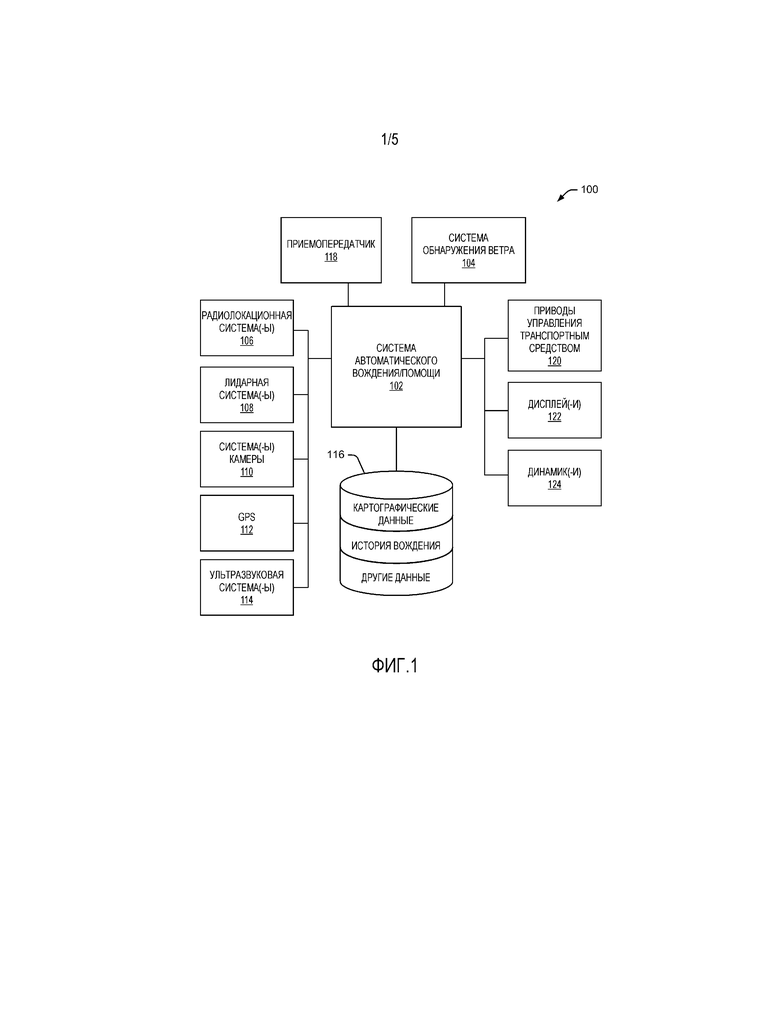
[0018] Фиг. 1 является блок-схемой, иллюстрирующей вариант осуществления системы 100 управления транспортным средством в транспортном средстве, которая включает в себя систему 104 обнаружения ветра. Система 102 автоматического вождения/помощи может быть использована, чтобы автоматизировать или управлять работой транспортного средства или предоставлять помощь водителю-человеку. Например, система 102 автоматического вождения/помощи может управлять одним или более из торможения, руления, натяжения ремня безопасности, ускорения, световых сигналов, предупредительных сигналов, оповещений водителя, радио, замков транспортного средства или любых других вспомогательных систем транспортного средства. В другом примере система 102 автоматического вождения/помощи может не иметь возможности обеспечивать какое-либо управление вождением (например, руление, ускорение или торможение), но может предоставлять оповещения и предупреждения, чтобы помогать водителю-человеку в безопасном вождении. Система 100 управления транспортным средством включает в себя систему 104 обнаружения ветра, которая взаимодействует с различными компонентами в системе управления транспортным средством, чтобы обнаруживать и реагировать на опасные ветровые ситуации. В одном варианте осуществления система 104 обнаружения ветра обнаруживает опасное ветровое условие рядом с транспортным средством (например, сильный боковой ветер или сдвиг ветра впереди транспортного средства) и регулирует одно или более действий транспортного средства, чтобы избегать или смягчать воздействие сильных ветров, таких как замедление транспортного средства или маневрирование транспортного средства рядом с естественной или созданной человеком защитой от ветра. Хотя система 104 обнаружения ветра показана как отдельный компонент на фиг. 1, в альтернативных вариантах осуществления система 104 обнаружения ветра может быть включена в систему 102 автоматического вождения/помощи или любой другой компонент транспортного средства.
[0019] Система 100 управления транспортным средством также включает в себя одну или более систем/устройств датчиков для обнаружения присутствия близких объектов или определения местоположения рассматриваемого транспортного средства (например, транспортного средства, которое включает в себя систему 100 управления транспортным средством). Например, система 100 управления транспортным средством может включать в себя радиолокационные системы 106, одну или более лидарных систем 108, одну или более систем 110 камер, систему глобального позиционирования (GPS) 112 и/или ультразвуковые системы 114. Одна или более систем 110 камер может включать в себя обращенную назад камеру, установленную на транспортное средство (например, задний фрагмент транспортного средства), обращенную вперед камеру и обращенную вбок камеру. Системы 110 камер могут также включать в себя одну или более камер салона, которые захватывают изображения пассажиров и других объектов внутри транспортного средства. Система 100 управления транспортным средством может включать в себя хранилище 116 данных для хранения релевантных или полезных данных для навигации и безопасности, таких как картографические данные, история вождения или другие данные. Система 100 управления транспортным средством может также включать в себя приемопередатчик 118 для беспроводной связи с мобильной или беспроводной сетью, другими транспортными средствами, инфраструктурой или любой другой системой связи.
[0020] Система 100 управления транспортным средством может включать в себя приводы 120 для управления транспортным средством, чтобы управлять различными аспектами вождения транспортного средства, такие как электромоторы, переключатели или другие приводы, чтобы управлять торможением, ускорением, рулевым управлением, натяжением ремня безопасности, замками дверей или т.п. Система 100 управления транспортным средством может также включать в себя один или более дисплеев 122, динамиков 124 или другие устройства, так что могут быть предоставлены оповещения водителю-человеку или пассажиру. Дисплей 122 может включать в себя индикатор на ветровом стекле, дисплей или индикатор приборной панели, экран отображения или любой другой визуальный индикатор, который может быть виден водителю или пассажиру транспортного средства. Динамики 124 могут включать в себя один или более динамиков звуковой системы транспортного средства или могут включать в себя динамик, специально предназначенный для оповещения водителя или пассажира.
[0021] Следует принимать во внимание, что вариант осуществления по фиг. 1 приводится только в качестве примера. Другие варианты осуществления могут включать в себя меньшее или большее число компонентов без отступления от объема раскрытия. Дополнительно, проиллюстрированные компоненты могут комбинироваться или включаться в другие компоненты без ограничения.
[0022] В одном варианте осуществления система 102 автоматического вождения/помощи конфигурируется, чтобы управлять вождением или навигацией рассматриваемого транспортного средства. Например, система 102 автоматического вождения/помощи может управлять исполнительными механизмами 120 управления транспортным средством, чтобы ехать по маршруту по дороге, площадке для парковки, проезжей части или другому местоположению. Например, система 102 автоматического вождения/помощи может определять маршрут на основе информации или данных восприятия, предоставляемых какими-либо из компонентов 106-118. Маршрут может также быть определен на основе маршрута, который осуществляет маневрирование транспортного средства, чтобы избегать или смягчать воздействие сильных ветров рядом с транспортным средством. Системы/устройства 106-110 и 114 датчиков могут быть использованы, чтобы получать данные датчиков в реальном времени, так что система 102 автоматического вождения/помощи может помогать водителю или управлять транспортным средством в реальном времени.
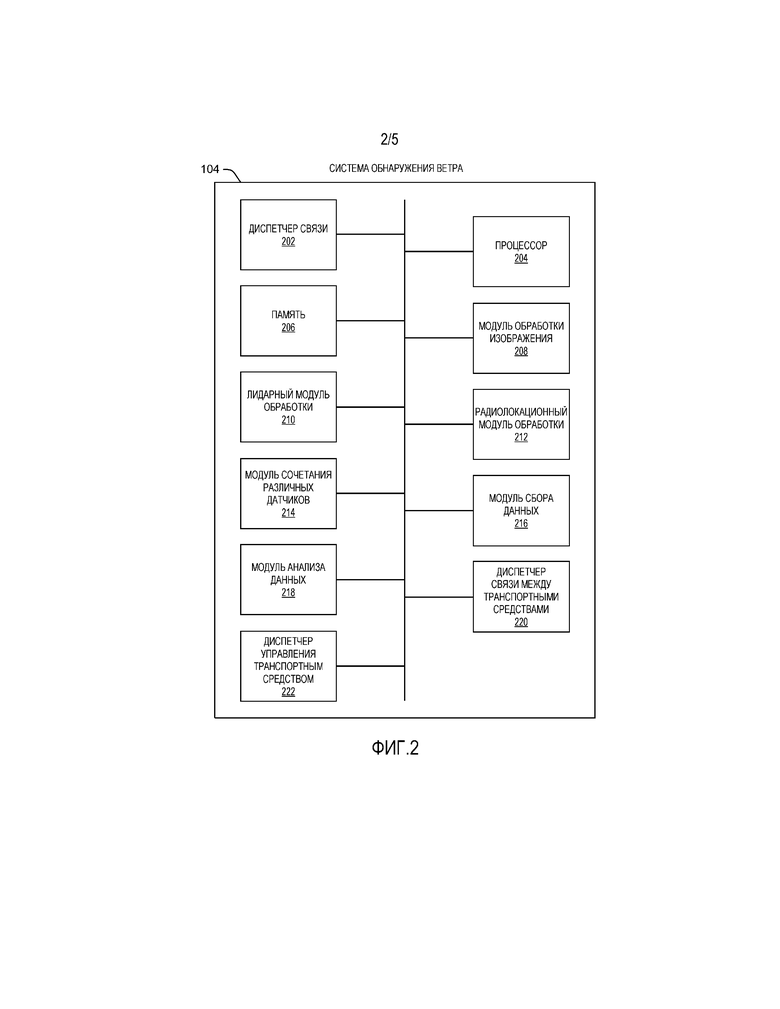
[0023] Фиг. 2 - это блок-схема, иллюстрирующая вариант осуществления системы 104 обнаружения ветра. Как показано на фиг. 2, система 104 обнаружения ветра включает в себя диспетчер 202 связи, процессор 204 и память 206. Диспетчер 202 связи предоставляет возможность системе 104 обнаружения ветра связываться с другими системами, такими как система 102 автоматического вождения/помощи. Процессор 204 выполняет различные инструкции, чтобы реализовывать функциональность, предоставляемую системой 104 обнаружения ветра, как обсуждается в данном документе. Память 206 хранит эти инструкции, также как и другие данные, используемые процессором 204 и другими модулями и компонентами, содержащимися в системе 104 обнаружения ветра.
[0024] Дополнительно, система 104 обнаружения ветра включает в себя модуль 208 обработки изображения, который принимает данные изображения от одной или более систем 110 камер и идентифицирует, например, другие транспортные средства, движущиеся по проезжей части, или взвешенные в воздухе частицы, движущиеся в ветре. В некоторых вариантах осуществления модуль 208 обработки изображения включает в себя алгоритм обнаружения взвешенной в воздухе частицы, который идентифицирует направление и скорость взвешенных в воздухе частиц рядом с транспортным средством. Лидарный модуль 210 обработки принимает лидарные данные от одной или более лидарных систем 108 и идентифицирует, например, взвешенные в воздухе частицы. В некоторых вариантах осуществления алгоритм обнаружения взвешенной в воздухе частицы обнаруживает скорость и направление взвешенных в воздухе частиц на основе лидарных данных. Дополнительно, радиолокационный модуль 212 обработки принимает радиолокационные данные от одной или более радиолокационных систем 106, чтобы идентифицировать, например, взвешенные в воздухе частицы рядом с транспортным средством. В некоторых вариантах осуществления алгоритм обнаружения взвешенной в воздухе частицы использует радиолокационные данные, чтобы обнаруживать скорость и направление взвешенных в воздухе частиц.
[0025] Система 104 обнаружения ветра также включает в себя модуль 214 сочетания различных датчиков, который объединяет данные от множества датчиков, камер и источников данных, как обсуждается в данном документе. Например, модуль 214 сочетания различных данных может объединять данные от одной или более камер 110, радиолокационных систем 106 и лидарных систем 108, чтобы обнаруживать взвешенные в воздухе частицы и другие показатели сильных ветровых условий рядом с транспортным средством. Модуль 216 сбора данных собирает данные из множества источников, таких как модуль 208 обработки изображения, лидарный модуль 210 обработки, радиолокационный модуль 212 обработки, модуль 214 сочетания различных датчиков и другие компоненты транспортного средства, такие как акселерометр, гироскоп и т.п. Информация акселерометра и гироскопа является полезной, например, чтобы обнаруживать перемещения относительно поперечной и вертикальной оси, которые могут быть вызваны сильными ветрами рядом с транспортным средством. Дополнительно, модуль 216 сбора данных может принимать (или осуществлять доступ) данные из дополнительных источников данных, такие как картографические данные, ассоциированные с областью рядом с текущим географическим местоположением, погодные данные в текущем географическом местоположении и любой другой тип данных из какого-либо источника данных. Картографические данные являются полезными, чтобы идентифицировать, например, предстоящую ориентацию дороги, ближайшие ветрозащитные ограждения (как природные, так и созданные человеком) и географические области, которые обычно подвергаются сильным ветровым условиям. Метеорологические данные, например, предоставляют информацию о погодных условиях рядом с транспортным средством, которые могут включать в себя сильные ветровые условия. Другие данные могут включать в себя, например, данные от других транспортных средств или инфраструктурных систем, которые сообщают о высоких ветровых условиях в области рядом с текущим географическим местоположением транспортного средства.
[0026] Система 104 обнаружения ветра дополнительно включает в себя модуль 218 анализа данных, который выполняет различные операции над данными, принятыми от любого числа датчиков и/или источников данных, чтобы обнаруживать опасные ветровые ситуации, как обсуждается в данном документе. Например, модуль 218 анализа данных может анализировать один или более типов данных от модуля 208 обработки изображения, лидарного модуля 210 обработки, радиолокационного модуля 212 обработки, модуля 214 сочетания различных датчиков, модуля 216 сбора данных или любого другого источника данных. В некоторых вариантах осуществления опасные ветровые ситуации определяются на основе скорости ветра, направления ветра (например, практически перпендикулярного направлению движения транспортного средства), обнаруженных порывов ветра или сдвига ветра и т.п.
[0027] Дополнительно, система 104 обнаружения ветра включает в себя диспетчер 220 связи между транспортными средствами, который предоставляет возможность множеству транспортных средств связываться друг с другом. Например, транспортное средство может сообщать об опасном ветровом условии другим ближайшим транспортным средствам. В некоторых вариантах осуществления транспортное средство может сообщать опасные ветровые условия инфраструктурной системе с помощью системы V2X-связи (транспортное средство-инфраструктура).
[0028] Система 104 обнаружения ветра также включает в себя диспетчер 222 управления транспортным средством, который организует управление транспортным средством на основе обнаружения опасного ветрового условия. В некоторых вариантах осуществления транспортное средство может маневрировать на обочину дороги и останавливаться, чтобы избегать движения сквозь резкий боковой ветер. В других вариантах осуществления диспетчер 222 управления транспортным средством формирует рекомендации для маневрирования транспортного средства, чтобы находить естественную или созданную человеком защиту от ветра. В других ситуациях диспетчер 222 управления транспортным средством может осуществлять маневр транспортного средства так, что оно обращается к ветру, тем самым, уменьшая вероятность опрокидывания транспортного средства вследствие резкого бокового ветра. Диспетчер 222 управления транспортным средством может инструктировать транспортному средству возобновлять обычные действия движения, после того как опасные ветровые условия стихают.
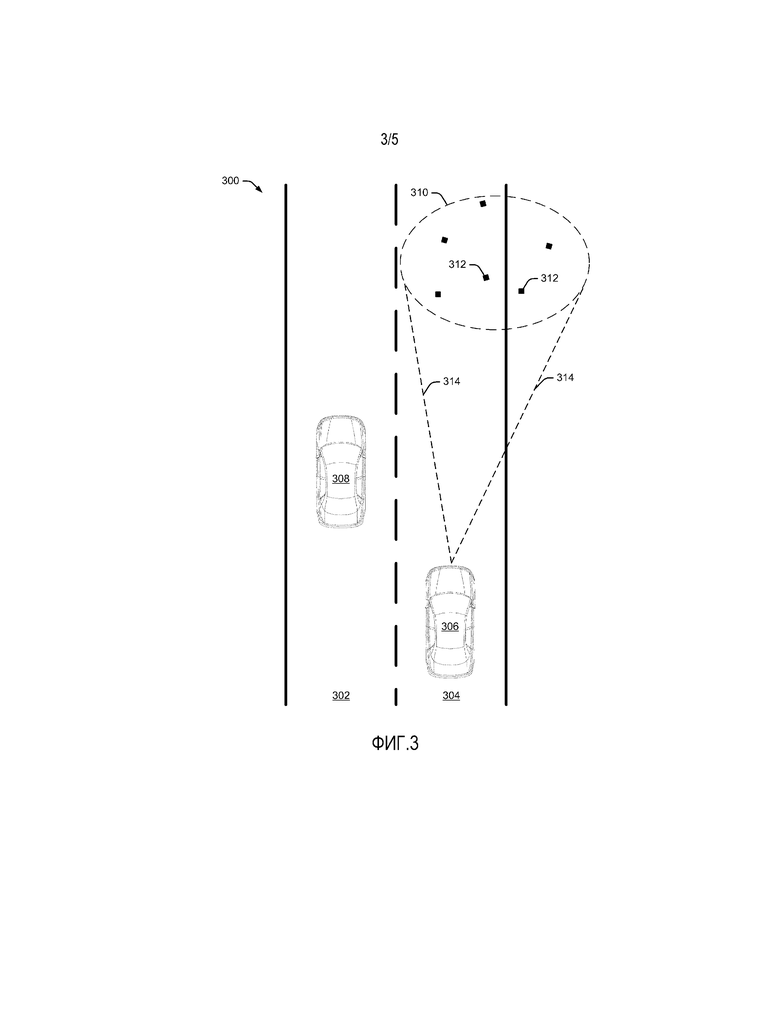
[0029] Фиг. 3 иллюстрирует вариант осуществления проезжей части 300 с множеством транспортных средств, движущихся в одинаковом направлении. В примере на фиг. 3 проезжая часть 300 имеет две полосы 302 и 304 с потоком транспорта, движущегося в одинаковом направлении. Два транспортных средства 306 и 308 движутся по дороге 300. Транспортное средство 306 движется по полосе 304, а транспортное средство 308 движется по полосе 302. Как показано на фиг. 3, область 310 впереди транспортного средства 306 включает в себя множество взвешенных в воздухе частиц 312. Эти взвешенные в воздухе частицы 312 могут быть любого размера и иметь любую форму. Дополнительно, область 310 может иметь любое число взвешенных в воздухе частиц 312. Примерные взвешенные в воздухе частицы 312 включают в себя частицы грязи, частицы растительности, частицы мусора, небольшие объекты и любой другой предмет или частицу, которая может гнаться или перемещаться ветром. Как обсуждается в данном документе, транспортное средство 306 имеет один или более датчиков, которые могут обнаруживать взвешенные в воздухе частицы. В некоторых вариантах осуществления лидарный датчик, установленный на транспортное средство 306, принимает данные (указанные прерывистыми линиями 314), ассоциированные с взвешенными в воздухе частицами 312. Принятые данные предоставляют возможность системе 104 обнаружения ветра определять скорость ветра и направление ветра на основе перемещения взвешенных в воздухе частиц 312 со временем. Как обсуждается в данном документе, скорость ветра и направление ветра используется, чтобы идентифицировать опасные ветровые условия, которые могут негативно влиять на транспортное средство.
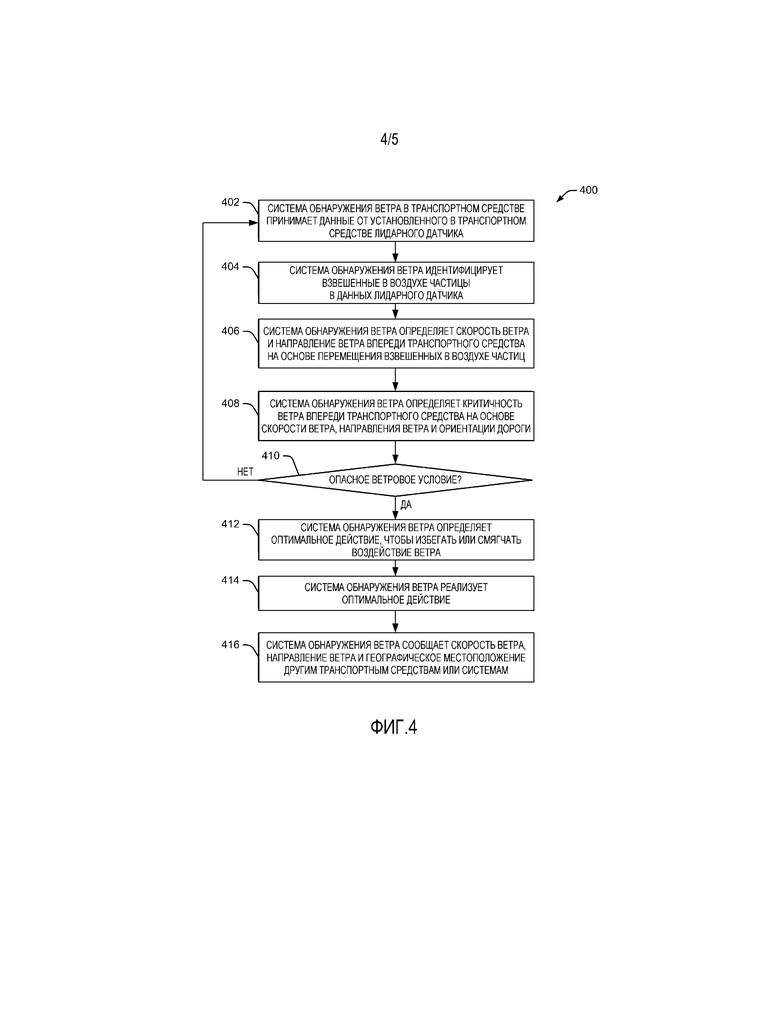
[0030] Фиг. 4 иллюстрирует вариант осуществления способа 400 для обнаружения опасных ветровых условий. Первоначально, система обнаружения ветра в транспортном средстве принимает 402 данные от установленной в транспортном средстве лидарной системы. Система обнаружения ветра идентифицирует 404 взвешенные в воздухе частицы в данных лидарной системы. На основе перемещения взвешенных в воздухе частиц со временем система обнаружения ветра определяет 406 скорость ветра и направление ветра впереди транспортного средства (т.е., области, к которой транспортное средство движется). На основе скорости ветра и направления ветра впереди транспортного средства система обнаружения ветра определяет 408 критичность ветровых условий. Критичность ветровых условий может быть дополнительно основана на типе транспортного средства (например, насколько чувствительным является транспортное средство к боковым ветрам или сдвигу ветра) и угле ветра относительно направления, в котором транспортное средство движется. Например, направление ветра, которое перпендикулярно направлению движения транспортного средства, более вероятно должно вызывать опрокидывание транспортного средства или подталкивание транспортного средства на другую полосу движения. Критичность ветровых условий может быть ранжирована по числовой шкале, такой как 0-10, где "0" представляет отсутствие ветра, а "10" представляет чрезвычайно опасное ветровое условие.
[0031] В некоторых вариантах осуществления ранжирование критичности ветровых условий учитывает перемещение других транспортных средств, вызванное сильными ветрами, обнаружение аварий или транспортных средств, которые качаются или переворачиваются, метеорологические сводки о сильных ветрах, уведомления от других транспортных средств о сильных ветровых условиях и т.п.
[0032] Способ 400 продолжается определением 410 того, является ли ветровое условие опасным (например, превышает пороговое значение или пороговый рейтинг критичности). Если ветровое условие не определяется 410 как опасное, способ 400 продолжает принимать данные, чтобы наблюдать за ветровой ситуацией впереди транспортного средства. Если ветровое условие определяется 410 как опасное, система обнаружения ветра определяет 412 оптимальное действие, чтобы избегать или смягчать воздействие ветра. Например, оптимальное действие может включать в себя одно или более из: уменьшения скорости транспортного средства, парковки транспортного средства рядом с естественной защитой от ветра, маневрирования транспортного средства близко к созданной человеком защите от ветра, позиционирование транспортного средства обращенным к ветру (или направления задней части транспортного средства к ветру) и т.п.
[0033] В некоторых вариантах осуществления система обнаружения ветра может использовать дифференциал с электронным ограничением проскальзывания транспортного средства, чтобы противодействовать нежелательным скоростям поворота вокруг вертикальной оси, вызванным боковыми ветрами. Дополнительно, система обнаружения ветра может использовать фрикционные тормоза, чтобы противодействовать скоростям поворота вокруг вертикальной оси на основе существующей электронной системы управления устойчивостью. Например, система обнаружения ветра может быть сконфигурирована, чтобы активировать дифференциал с электронным ограничением проскальзывания транспортного средства при первом пороговом значении поворота вокруг вертикальной оси и активировать фрикционные тормоза при втором пороговом значении поворота вокруг вертикальной оси, где второе пороговое значение поворота вокруг вертикальной оси больше первого порогового значения поворота вокруг вертикальной оси. В отдельных реализациях система обнаружения ветра может использовать различные данные, как обсуждается в данном документе, чтобы соединять дифференциал с электронным ограничением проскальзывания транспортного средства в ожидании встречающихся боковых ветров, которые вероятно вызовут нежелательные скорости поворота вокруг вертикальной оси. В некоторых реализациях фрикционные тормоза могут быть использованы независимо от дифференциала с электронным ограничением проскальзывания, чтобы противодействовать нежелательным скоростям поворота вокруг вертикальной оси, вызванным боковыми ветрами.
[0034] В других вариантах осуществления система обнаружения ветра может использовать систему AWD (привода на все колеса) транспортного средства, чтобы помогать противодействовать нежелательным скоростям поворота вокруг вертикальной оси, вызванным боковыми ветрами. Например, система обнаружения ветра может инструктировать приводу управления транспортным средством прикладывать крутящий момент ко вторичной оси системы AWD по требованию. Дополнительно, система обнаружения ветра может соединять вспомогательную линию привода (если в настоящее время не соединена) в AWD-системе, имеющей быстродействующую систему соединения/разъединения.
[0035] Система обнаружения ветра затем реализует 414 оптимальное действие и сообщает 416 скорость ветра, направление ветра и географическое местоположение другим транспортным средствам или системам (например, с помощью систем V2V или V2X-связи). Дополнительно, система обнаружения ветра может формировать звуковые и/или визуальные предупреждения пассажирам транспортного средства, касающиеся опасного ветрового условия. Дополнительно, система обнаружения ветра может формировать звуковые и/или визуальные инструкции вождения, чтобы осуществлять маневрирование транспортного средства с помощью оптимального действия, чтобы избегать или смягчать воздействие ветра.
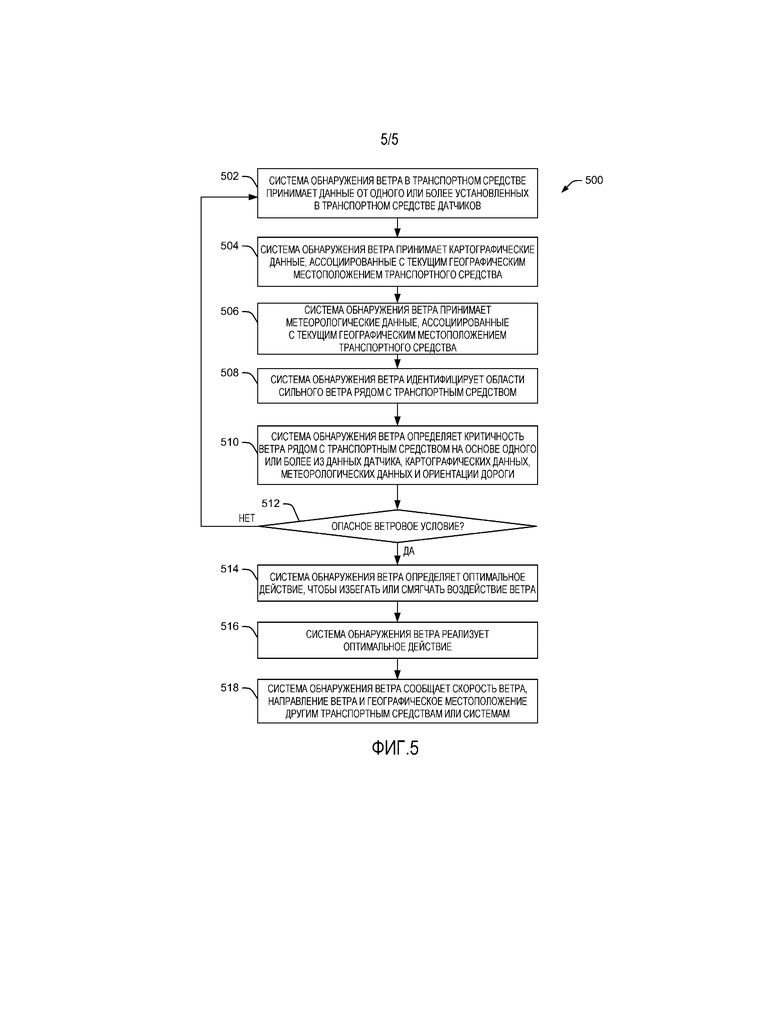
[0036] Фиг. 5 иллюстрирует другой вариант осуществления способа 500 для обнаружения опасных ветровых условий. Первоначально, система обнаружения ветра принимает 502 данные от одного или более установленных в транспортном средстве датчиков, таких как лидарные датчики, радиолокационные датчики, датчики камеры, ультразвуковые датчики и т.п. Система обнаружения ветра также принимает 504 картографические данные, ассоциированные с текущим географическим местоположением транспортного средства. Эти картографические данные предоставляют информацию, такую как ориентация дороги впереди транспортного средства, местоположения естественных или созданных человеком защит от ветра, области известных сильных ветровых условий и т.п. Картографические данные могут быть доступны из собственной картографической информации транспортного средства (например, как части навигационной системы транспортного средства) или из внешнего источника картографических данных. Система обнаружения ветра также принимает 506 метеорологические данные, ассоциированные с текущим географическим местоположением транспортного средства. Метеорологические данные могут быть приняты из одного или более метеорологических источников, систем слежения за погодой и т.п. На основе различных принятых данных (или к которым осуществлен доступ), обсужденных выше, система обнаружения ветра идентифицирует 508 области сильного ветра рядом с транспортным средством.
[0037] Способ 500 продолжается, когда система обнаружения ветра определяет 510 критичность ветра рядом с транспортным средством на основе, например, одного или более из данных датчиков, картографических данных, метеорологических данных и ориентации дороги. Если способ 500 определяет на этапе 512, что опасное ветровое условие не существует, способ продолжает наблюдать за областью впереди транспортного средства.
[0038] Если способ 500 определяет на этапе 512, что опасное ветровое условие существует, система обнаружения ветра определяет 514 оптимальное действие, чтобы избегать или смягчать воздействие ветра. Как обсуждается в данном документе, оптимальное действие может включать в себя одно или более из: уменьшения скорости транспортного средства, парковки транспортного средства рядом с естественной защитой от ветра, маневрирования транспортного средства близко к созданной человеком защите от ветра, позиционирования транспортного средства обращенным к ветру и т.п. Система обнаружения ветра затем реализует 516 оптимальное действие и сообщает 518 скорость ветра, направление ветра и географическое местоположение другим транспортным средствам или системам (например, с помощью систем V2V или V2X-связи). Дополнительно, система обнаружения ветра может формировать звуковые и/или визуальные предупреждения пассажирам транспортного средства, касающиеся опасного ветрового условия. Дополнительно, система обнаружения ветра может формировать звуковые и/или визуальные инструкции вождения, чтобы осуществлять маневрирование транспортного средства с помощью оптимального действия, чтобы избегать или смягчать воздействие ветра.
[0039] В некоторых вариантах осуществления система обнаружения ветра может обнаруживать сильные ветровые условия на основе перемещения ближайших транспортных средств. Например, данные от одного или более датчиков транспортного средства могут быть использованы системой обнаружения ветра, чтобы идентифицировать поперечное перемещение ближайших транспортных средств, "толкаемых" или "сотрясаемых" сильными ветровыми условиями. Когда этот тип перемещения транспортного средства обнаруживается, система обнаружения ветра может ранжировать критичность ветрового условия на основе величины перемещения ближайших транспортных средств.
[0040] В то время как различные варианты осуществления настоящего изобретения описаны в данном документе, должно быть понятно, что они представлены только в качестве примера, а не ограничения. Специалистам в соответствующей области техники будет ясно, что различные изменения в форме и деталях могут быть сделаны в настоящем документе без отступления от сущности и объема изобретения. Таким образом, широта и объем настоящего изобретения не должны ограничиваться любым из вышеописанных примерных вариантов осуществления, но должны быть определены только в соответствии с последующей формулой изобретения и ее эквивалентами. Описание в данном документе представлено в целях иллюстрации и описания. Оно не предназначено для того, чтобы быть полным или чтобы ограничивать раскрытие точной раскрытой формой. Многие модификации и разновидности допустимы в свете раскрытой идеи. Дополнительно, должно быть отмечено, что любая или все из альтернативных реализаций, рассматриваемых в данном документе, могут быть использованы в любой желаемой комбинации, чтобы формировать дополнительные гибридные реализации изобретения.
Изобретение относится к транспортным системам. Способ обнаружения опасных ветровых условий содержит этапы, на которых принимают данные от установленного в транспортном средстве датчика, представляющего собой лидарный датчик, принимают изображения от камеры, принимают данные относительно поперечной и вертикальной оси от по меньшей мере одного из акселерометра и гироскопа, обнаруживают частицы вокруг транспортного средства путем использования данных датчика и изображений, принимают картографические данные, принимают погодные данные, определяют ветровое условие около транспортного средства. При определении того, что ветровое условие около транспортного средства является суровым, определяют оптимальное действие. Устройство для обнаружения опасных ветровых условий содержит множество датчиков, систему обнаружения ветра, чтобы идентифицировать взвешенные в воздухе частицы рядом с транспортным средством. Система обнаружения ветра дополнительно сконфигурирована, чтобы в ответ на идентификацию взвешенных в воздухе частиц: определять скорость ветра и направление ветра на основе движения взвешенных в воздухе частиц, определять оптимальное действие, чтобы избежать или смягчить воздействие ветра на транспортное средство и осуществлять оптимальное действие. Достигается устранение или смягчение воздействий ветра. 2 н. и 5 з.п. ф-лы, 5 ил.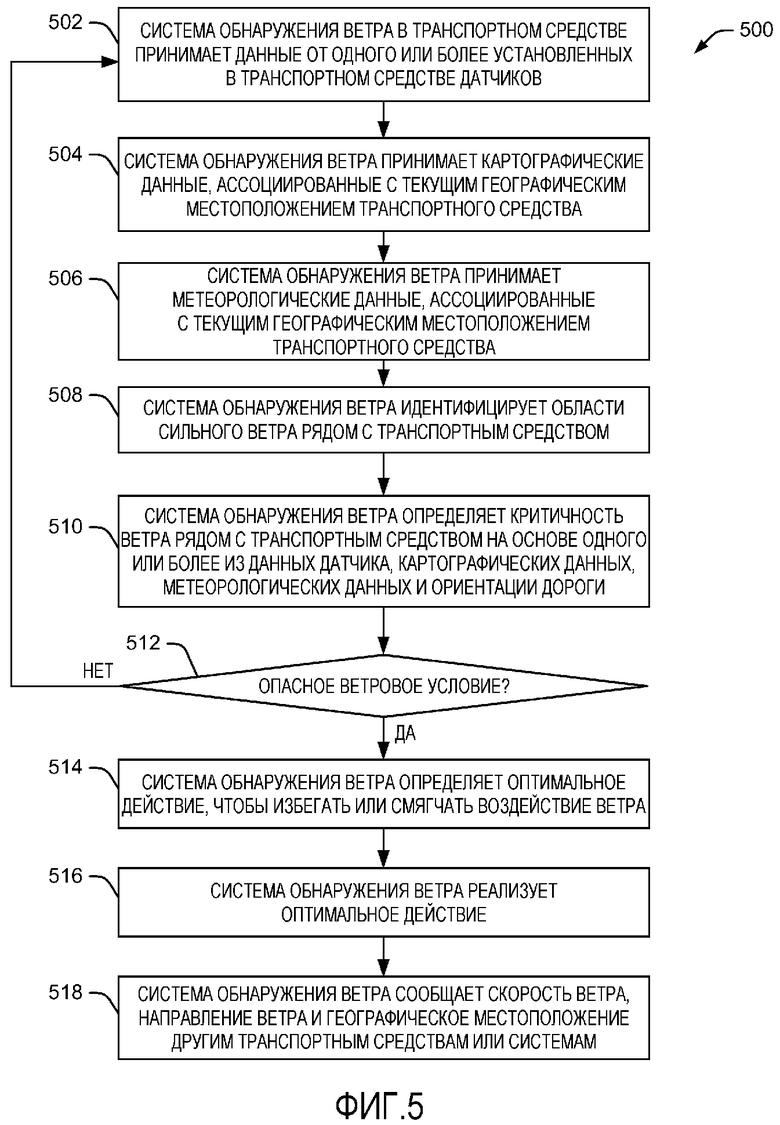
1. Способ обнаружения опасных ветровых условий, содержащий этапы, на которых:
принимают, посредством системы обнаружения ветра, данные от установленного в транспортном средстве датчика, представляющего собой лидарный датчик;
принимают, посредством системы обнаружения ветра, изображения от камеры, установленной в транспортном средстве;
принимают, посредством системы обнаружения ветра, данные относительно поперечной и вертикальной оси от по меньшей мере одного из акселерометра и гироскопа;
обнаруживают частицы вокруг транспортного средства путем использования данных датчика и изображений;
принимают, посредством системы обнаружения ветра, картографические данные, ассоциированные с текущим географическим местоположением транспортного средства;
принимают, посредством системы обнаружения ветра, погодные данные, ассоциированные с текущим географическим местоположением транспортного средства;
определяют, посредством системы обнаружения ветра, ветровое условие около транспортного средства, основываясь на сочетании данных датчика, изображений, данных относительно поперечной и вертикальной оси, картографических данных и погодных данных;
при определении того, что ветровое условие около транспортного средства является суровым, определяют, посредством системы обнаружения ветра, чтобы избежать или смягчить воздействие ветра на транспортное средство; и
осуществляют, посредством системы обнаружения ветра, оптимальное действие.
2. Способ по п. 1, в котором транспортное средство также включает в себя радиолокационный датчик.
3. Способ по п. 1, в котором оптимальное действие, чтобы избегать или смягчать воздействие ветра на транспортное средство, включает в себя, по меньшей мере, одно из уменьшения скорости транспортного средства, парковки транспортного средства рядом с естественными защитами от ветра, маневрирования транспортного средства близко к созданным человеком защитам от ветра и позиционирования транспортного средства обращенным к ветру.
4. Способ по п. 1, содержащий также этап, на котором формируют звуковые или визуальные предупреждения, касающиеся ветровых условий.
5. Способ по п. 1, содержащий также этап, на котором сообщают ветровые условия другим ближайшим транспортным средствам.
6. Способ по п. 1, в котором транспортное средство является автономным транспортным средством.
7. Устройство для обнаружения опасных ветровых условий, содержащее:
множество датчиков, установленных на транспортном средстве и сконфигурированных с возможностью захватывать данные датчика, причем множество датчиков включает в себя лидарный датчик, радиолокационный датчик, камеру, акселерометр и гироскоп; и
систему обнаружения ветра, соединенную с датчиком и сконфигурированную с возможностью принимать и анализировать данные от множества датчиков и сочетание данных от всех из множества датчиков, чтобы идентифицировать взвешенные в воздухе частицы рядом с транспортным средством, причем система обнаружения ветра дополнительно сконфигурирована, чтобы в ответ на идентификацию взвешенных в воздухе частиц:
определять скорость ветра и направление ветра на основе движения взвешенных в воздухе частиц;
определять оптимальное действие, чтобы избежать или смягчить воздействие ветра на транспортное средство; и
осуществлять оптимальное действие.
| US 2016290912 A1, 06.10.2016 | |||
| US 5872621 A, 16.02.1999 | |||
| US 2015051793 A1, 19.02.2015. |

