ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
[0001] Настоящее изобретение относится к системам транспортных средств и, в частности, к системам и способам предотвращения столкновений между транспортными средствами.
ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
[0002] Автомобили и другие транспортные средства обеспечивают значительную часть транспортировок коммерческих, государственных и частных лиц. Транспортные средства, например, автономные транспортные средства, движутся по дорогам, которые подвержены структурному разрушению и другим проблемам, представляющим угрозу для транспортных средств и их пассажиров. В некоторых ситуациях транспортное средство может быть подвержено риску столкновения с другим приближающимся сзади транспортным средством. Например, первое транспортное средство может внезапно остановиться или замедлиться для объезда препятствия или остановившихся транспортных средств перед первым транспортным средством. В этой ситуации первое транспортное средство подвержено риску удара сзади вторым транспортным средством, которое не может остановиться достаточно быстро. Раннее обнаружение потенциального столкновения обеспечивает транспортному средству время на принятие мер для предотвращения или смягчения столкновения.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Предлагается способ, содержащий этапы, на которых: принимают данные от множества датчиков, установленных на первом транспортном средстве; определяют посредством системы предотвращения столкновений вероятность того, что второе транспортное средство столкнется с задней частью первого транспортного средства, на основе принимаемых данных; и в ответ на определение вероятности столкновения: обнаруживают свободное пространство вблизи первого транспортного средства; и определяют наилучшее действие для предотвращения или смягчения вероятного столкновения на основе обнаруженного свободного пространства. Причем множество датчиков включает в себя одно или более из лидарного датчика, радиолокационного датчика и камеры. Причем обнаружение свободного пространства вблизи первого транспортного средства включает в себя: обнаружение свободного пространства перед первым транспортным средством; обнаружение свободного пространства слева от первого транспортного средства; и обнаружение свободного пространства справа от первого транспортного средства. Причем наилучшее действие для предотвращения или смягчения вероятного столкновения включает в себя движение первого транспортного средства вперед на свободное пространство перед первым транспортным средством. Причем наилучшее действие для предотвращения или смягчения вероятного столкновения включает в себя движение транспортного средства на свободное пространство слева от первого транспортного средства. Причем наилучшее действие для предотвращения или смягчения вероятного столкновения включает в себя движение транспортного средства на свободное пространство справа от первого транспортного средства. Причем способ дополнительно содержит этап, на котором определяют уровни автоматизированного вождения, доступные первому транспортному средству. Причем определение наилучшего действия для предотвращения или смягчения вероятного столкновения дополнительно основано на уровнях автоматизированного вождения, доступных первому транспортному средству. Причем способ дополнительно содержит этап, на котором реализуют наилучшее действие для предотвращения или смягчения вероятного столкновения. Причем способ дополнительно содержит этап, на котором сообщают о вероятном столкновении и наилучшем действии другим транспортным средствам вблизи первого транспортного средства. Причем способ дополнительно содержит этап, на котором сообщают о вероятном столкновении и наилучшем действии инфраструктурной системе. Причем определение вероятности столкновения включает в себя: определение расстояния между первым транспортным средством и вторым транспортным средством; определение скорости второго транспортного средства; и определение вероятности того, что второе транспортное средство сможет остановиться до столкновения с первым транспортным средством, на основе расстояния и скорости. Причем первое транспортное средство представляет собой автономное транспортное средство.
Также предлагается способ, содержащий этапы, на которых: принимают посредством системы предотвращения столкновений данные от множества датчиков, установленных на первом транспортном средстве; определяют посредством системы предотвращения столкновений вероятность того, что второе транспортное средство столкнется с задней частью первого транспортного средства, на основе принимаемых данных; и в ответ на определение вероятности столкновения: определяют посредством системы предотвращения столкновений уровни автоматизированного вождения, доступные первому транспортному средству; обнаруживают посредством системы предотвращения столкновений свободное пространство вблизи первого транспортного средства; и определяют посредством системы предотвращения столкновений наилучшее действие для предотвращения или смягчения вероятного столкновения на основе обнаруженного свободного пространства и уровней автоматизированного вождения, доступных первому транспортному средству. Причем обнаружение свободного пространства вблизи первого транспортного средства включает в себя: обнаружение свободного пространства перед первым транспортным средством; обнаружение свободного пространства слева от первого транспортного средства; и обнаружение свободного пространства справа от первого транспортного средства. Причем определение наилучшего действия для предотвращения или смягчения вероятного столкновения включает в себя одно из: движения первого транспортного средства вперед на свободное пространство перед первым транспортным средством; движения первого транспортного средства на свободное пространство слева от первого транспортного средства; и движения первого транспортного средства на свободное пространство справа от первого транспортного средства. Причем способ дополнительно содержит этап, на котором реализуют наилучшее действие для предотвращения или смягчения вероятного столкновения. Причем способ дополнительно содержит этап, на котором сообщают о вероятном столкновении и наилучшем действии другим транспортным средствам вблизи первого транспортного средства.
Также предлагается устройство, содержащее: множество датчиков, установленных на первом транспортном средстве и выполненных с возможностью захвата данных датчиков; множество исполнительных механизмов управления транспортным средством, выполненных с возможностью регулировки работы первого транспортного средства; и систему предотвращения столкновений, связанную с множеством датчиков и множеством исполнительных механизмов управления транспортным средством, причем система предотвращения столкновений выполнена с возможностью приема и анализа данных датчиков для определения вероятности того, что второе транспортное средство столкнется с задней частью первого транспортного средства, причем система предотвращения столкновений дополнительно выполнена с возможностью в ответ на определение вероятного столкновения: обнаружения свободного пространства вблизи первого транспортного средства; и определения наилучшего действия для предотвращения или смягчения вероятного столкновения на основе обнаруженного свободного пространства. Причем множество датчиков включает в себя одно или более из лидарного датчика, радиолокационного датчика и камеры.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0003] Неограничивающие и неисчерпывающие варианты выполнения настоящего изобретения описаны со ссылкой на нижеследующие фигуры, на которых одинаковые ссылочные позиции относятся к одинаковым частям на разных видах, кроме тех случаев, когда указано иное.
[0004] Фиг. 1 представляет собой структурную схему, иллюстрирующую вариант выполнения системы управления транспортного средства, которая включает в себя систему предотвращения столкновений.
[0005] Фиг. 2 представляет собой структурную схему, иллюстрирующую вариант выполнения системы предотвращения столкновений.
[0006] Фиг. 3 иллюстрирует проезжую часть с множеством транспортных средств, движущихся в одном направлении.
[0007] Фиг. 4 иллюстрирует вариант выполнения способа обнаружения и предотвращения столкновения между двумя транспортными средствами.
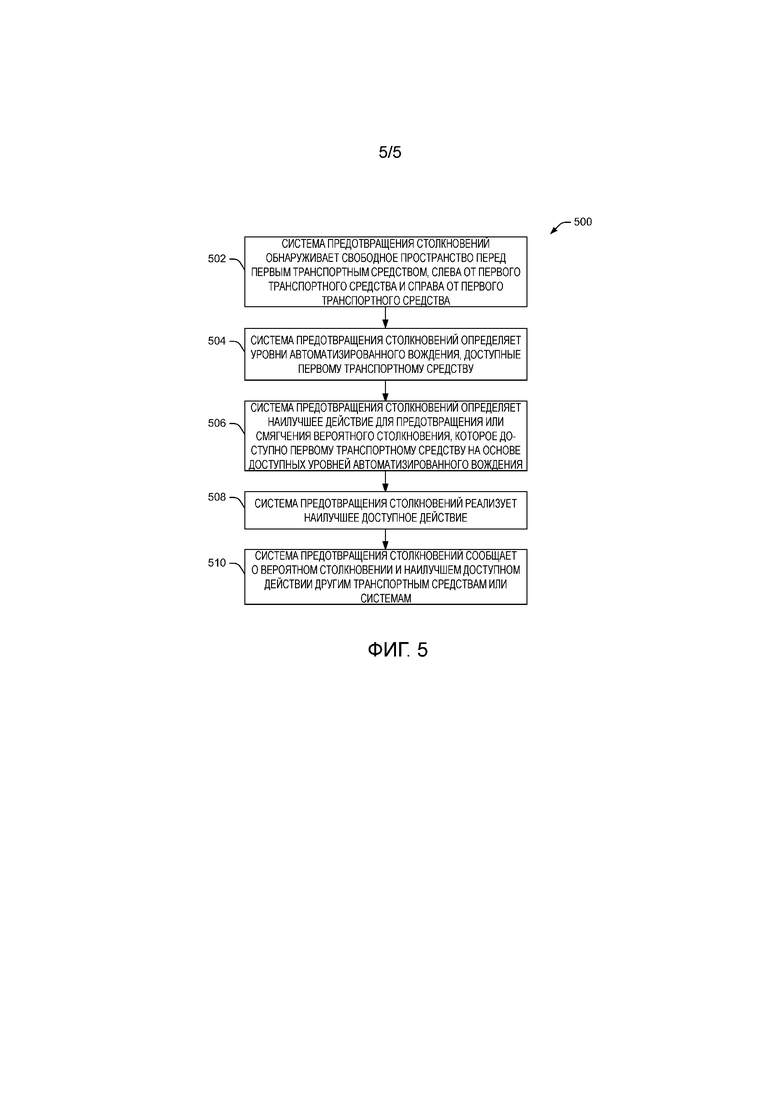
[0008] Фиг. 5 иллюстрирует вариант выполнения способа определения действия, выполнение которого предотвращает или смягчает потенциальное столкновение между двумя транспортными средствами.
ПОДРОБНОЕ ОПИСАНИЕ
[0009] В нижеследующем раскрытии сделана ссылка на сопровождающие чертежи, которые образуют его часть, и на которых путем иллюстрации показаны определенные реализации, в которых изобретение может быть осуществлено на практике. Следует понимать, что могут быть использованы другие реализации, и могут быть выполнены изменения без отклонения от объема охраны настоящего изобретения. Ссылки в описании на «один вариант выполнения», «вариант выполнения», «примерный вариант выполнения» и т.д. указывают, что описанный вариант выполнения может включать в себя конкретный признак, структуру или характеристику, но каждый вариант выполнения необязательно включает в себя конкретный признак, структуру или характеристику. Более того, такие фразы необязательно ссылаются на один и тот же вариант выполнения. Кроме того, при описании конкретного признака, структуры или характеристики в связи с вариантом выполнения предполагается, что она находится в пределах знания специалиста в области техники для осуществления такого признака, структуры или характеристики в связи с другими вариантами выполнения, описанными или нет в явной форме.
[0010] Реализации раскрытых в настоящем документе систем, устройств и способов могут содержать или использовать компьютер специального назначения или общего назначения, включающий в себя компьютерное аппаратное обеспечение, например, один или более процессоров и системную память, которые рассмотрены в настоящем документе. Реализации в пределах объема охраны настоящего изобретения также могут включать в себя физический и другой считываемый компьютером носитель для переноса или хранения исполняемых компьютером инструкций и/или структур данных. Такие считываемые компьютером носители могут представлять собой любые доступные носители, к которым может быть получен доступ посредством компьютерной системы общего назначения или специального назначения. Считываемые компьютером носители, которые хранят исполняемые компьютером инструкции, представляют собой компьютерные запоминающие носители (устройства). Считываемые компьютером носители, которые переносят исполняемые компьютером инструкции, представляют собой среду передачи данных. Таким образом, путем примера и без ограничения реализации изобретения могут содержать по меньшей мере два совершенно разных вида считываемых компьютером носителей: компьютерные запоминающие носители (устройства) и среду передачи данных.
[0011] Компьютерные запоминающие носители (устройства) включают в себя RAM, ROM, EEPROM, CD-ROM, твердотельные накопители («SSD») (например, на основе RAM), флэш-память, память с изменением фазового состояния («PCM»), другие типы памяти, другие накопители на оптических дисках, накопители на магнитных дисках или другие магнитные запоминающие устройства, или любые другие носители, которые могут быть использованы для хранения требуемого средства программного кода в виде исполняемых компьютером инструкций или структур данных, и к которым может быть получен доступ посредством компьютера общего назначения или специального назначения.
[0012] Реализация раскрытых в настоящем документе устройств, систем и способов может осуществлять связь через компьютерную сеть. «Сеть» определена как один или более каналов передачи данных, которые позволяют передачу электронных данных между компьютерными системами и/или модулями и/или другими электронными устройствами. При передаче или обеспечении информации через сеть или другое коммуникационное соединение (проводное, беспроводное или сочетание проводного или беспроводного) в компьютер, компьютер рассматривает соединение как среду передачи данных. Среда передачи данных может включать в себя сеть и/или каналы передачи данных, которые могут быть использованы для переноса требуемого средства программного кода в виде исполняемых компьютером инструкций или структур данных, и к которым может быть получен доступ посредством компьютера общего назначения или специального назначения. Сочетания вышеописанных элементов также должны быть включены в пределы объема охраны считываемого компьютером носителя.
[0013] Исполняемые компьютером инструкции содержат, например, инструкции и данные, которые при исполнении в процессоре побуждают компьютер общего назначения, компьютер специального назначения или устройство обработки специального назначения к выполнению определенных функций или групп функций. Исполняемые компьютером инструкции могут представлять собой, например, двоичные коды, инструкции промежуточного формата, такие как язык ассемблера или даже исходный код. Хотя объект описан языком, характерным для структурных признаков и/или методологических действий, следует понимать, что объект, определенный в приложенной формуле изобретения, необязательно ограничен описанными в настоящем документе признаками или действиями. Наоборот, описанные признаки и действия раскрыты как примерные формы реализации формулы изобретения.
[0014] Специалисту в области техники будет понятно, что изобретение может быть осуществлено в сетевых вычислительных средах со многими типами конфигураций вычислительных систем, включая компьютер на приборной панели транспортного средства, персональные компьютеры, настольные компьютеры, переносные компьютеры, процессоры обработки сообщений, портативные устройства, многопроцессорные системы, микропроцессорную или программируемую бытовую электронику, сетевые персональные компьютеры, миникомпьютеры, большие электронно-вычислительные машины, мобильные телефоны, карманные персональные компьютеры, планшетные компьютеры, пейджеры, маршрутизаторы, коммутационные устройства, различные запоминающие устройства и т.п. Изобретение также может быть осуществлено в распределенных системных средах, где и локальные, и удаленные компьютерные системы, которые связаны (проводными каналами передачи данных, беспроводными каналами передачи данных или сочетанием проводных и беспроводных каналов передачи данных) по сети, выполняют задачи. В распределенной системной среде программные модули могут быть расположены как в локальных, так и в удаленных запоминающих устройствах.
[0015] Кроме того, при необходимости, описанные в настоящем документе функции могут быть выполнены в одном или более из: аппаратного обеспечения, программного обеспечения, аппаратно-программного обеспечения, цифровых компонентов или аналоговых компонентов. Например, одна или более интегральных схем специального назначения (ASIC) могут быть запрограммированы с возможностью выполнения одной или более описанных в настоящем документе систем и процедур. Определенные термины используются во всем описании и формуле изобретения для обозначения конкретных системных компонентов. Как будет понятно специалисту в области техники, компоненты могут быть названы другими названиями. Настоящий документ не предусматривает различие между компонентами, которые отличаются по названию, а не по функции.
[0016] Следует отметить, что рассмотренные в настоящем документе варианты выполнения датчиков могут содержать компьютерное аппаратное обеспечение, программное обеспечение, аппаратно-программное обеспечение или любое их сочетание для выполнения по меньшей мере части их функций. Например, датчик может включать в себя компьютерный код, выполненный с возможностью выполнения в одном или более процессорах, и может включать в себя аппаратную логику/электрическую схему, управляемую компьютерным кодом. Эти примерные устройства обеспечены в настоящем документе в целях иллюстрации и не предназначены для ограничения. Варианты выполнения настоящего изобретения могут быть осуществлены в дополнительных типах устройств, которые должны быть известны специалисту в области техники.
[0017] По меньшей мере некоторые варианты выполнения изобретения направлены на компьютерные программные продукты, содержащие такую логику (например, в форме программного обеспечения), сохраненную на любом используемом компьютером носителе. Такое программное обеспечение при выполнении в одном или более устройствах обработки данных побуждает устройство работать так, как описано в настоящем документе.
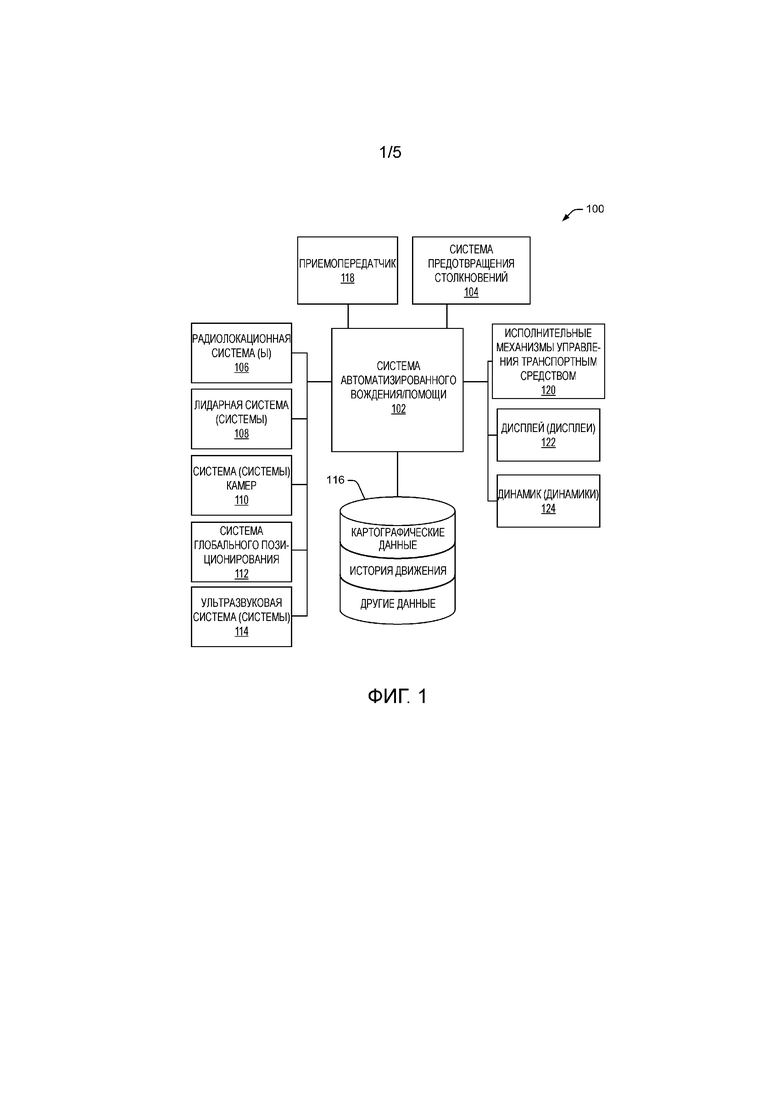
[0018] Фиг. 1 представляет собой структурную схему, иллюстрирующую вариант выполнения системы 100 управления транспортного средства в транспортном средстве, которая включает в себя систему 104 предотвращения столкновений. Для автоматизации или управления работой транспортного средства или для обеспечения помощи водителю может быть использована система 102 автоматизированного вождения/помощи. Например, система 102 автоматизированного вождения/помощи может управлять одним или более аспектами из торможения, рулевого управления, натяжения ремней безопасности, ускорения, световых приборов, предупреждений, уведомлений водителя, радиоприемника, замков транспортного средства или любых других вспомогательных систем транспортного средства. В другом примере система 102 автоматизированного вождения/помощи не способна обеспечивать какое-либо управление движением (например, рулевым управлением, ускорением или торможением), но может обеспечивать уведомления и предупреждения для помощи водителю в безопасном вождении. Система 100 управления транспортного средства включает в себя систему 104 предотвращения столкновений, которая взаимодействует с различными компонентами системы управления транспортного средства для обнаружения и реагирования на потенциальные (или вероятные) столкновения с другими транспортными средствами. В одном варианте выполнения система 104 предотвращения столкновений обнаруживает потенциальное столкновение (например, столкновение с приближающимся сзади транспортным средством) и регулирует одну или более операций транспортного средства для предотвращения или смягчения потенциального столкновения, например, маневрирование транспортного средства на другую полосу движения. Хотя на Фиг. 1 система 104 предотвращения столкновений показана в виде отдельного компонента, в альтернативных вариантах выполнения система 104 предотвращения столкновений может быть встроена в систему 102 автоматизированного вождения/помощи или любой другой компонент транспортного средства.
[0019] Система 100 управления транспортного средства также включает в себя одну или более систем/устройств обнаружения для обнаружения наличия близлежащих объектов или определения местоположения основного транспортного средства (например, транспортного средства, которое включает в себя систему 100 управления транспортного средства). Например, система 100 управления транспортного средства может включать в себя радиолокационные системы 106, одну или более лидарных систем 108, одну или более систем 110 камер, систему 112 глобального позиционирования (GPS) и/или ультразвуковые системы 114. Одна или более систем 110 камер могут включать в себя камеру заднего вида, установленную на транспортном средстве (например, на задней части транспортного средства), камеру переднего вида и камеру бокового вида. Системы 110 камер также могут включать в себя одну или более внутренних камер, которые захватывают изображения пассажиров и других объектов в транспортном средстве. Система 100 управления транспортным средством может включать в себя хранилище 116 данных для хранения существенных или полезных данных для навигации и безопасности, например, картографических данных, истории движения или других данных. Система 100 управления транспортного средства также может включать в себя приемопередатчик 118 для беспроводной связи с мобильной или беспроводной сетью, другими транспортными средствами, инфраструктурой или любой другой системой связи.
[0020] Система 100 управления транспортного средства может включать в себя исполнительные механизмы 120 управления транспортным средством для управления различными аспектами движения транспортного средства, например, электродвигатели, переключатели или другие исполнительные механизмы, для управления торможением, ускорением, рулевым управлением, натяжением ремней безопасности, дверными замками или т.п. Система 100 управления транспортного средства также может включать в себя один или более дисплеев 122, динамиков 124 или других устройств, так что водителю или пассажиру могут быть обеспечены уведомления. Дисплей 122 может включать в себя дисплей на лобовом стекле, дисплей или индикатор на приборной панели, дисплейный экран или любой другой визуальный индикатор, который может быть виден водителю или пассажиру транспортного средства. Динамики 124 могут включать в себя один или более динамиков звуковой системы транспортного средства или могут включать в себя специализированный динамик для уведомления водителя или пассажира.
[0021] Следует понимать, что вариант выполнения, показанный на Фиг. 1, приведен исключительно путем примера. Другие варианты выполнения могут включать в себя меньшее количество или дополнительные компоненты без отклонения от объема охраны изобретения. Кроме того, проиллюстрированные компоненты могут быть объединены или включены в другие компоненты без ограничения.
[0022] В одном варианте выполнения система 102 автоматизированного вождения/помощи выполнена с возможностью управления движением или навигацией основного транспортного средства. Например, система 102 автоматизированного вождения/помощи может управлять исполнительными механизмами 120 управления транспортным средством для движения по траектории по дороге, автомобильной стоянке, подъездной дороге или другим местам. Например, система 102 автоматизированного вождения/помощи может определять траекторию на основе информации или данных о восприятии, обеспечиваемых любым из компонентов 106-118. Траектория также может быть определена на основе маршрута, по которому движется транспортное средство, для предотвращения или смягчения потенциального столкновения. Системы/устройства 106-110 и 114 обнаружения могут быть использованы для получения данных обнаружения в режиме реального времени, чтобы система 102 автоматизированного вождения/помощи могла помогать водителю или управлять движением транспортного средства в режиме реального времени.
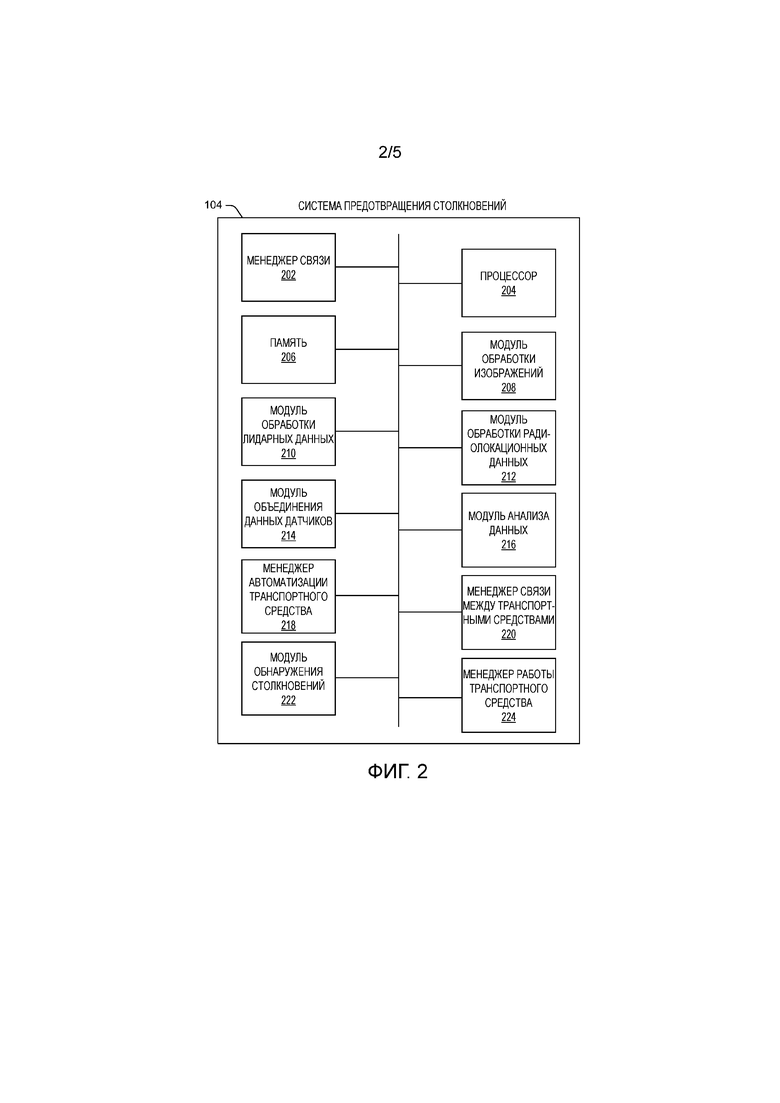
[0023] Фиг. 2 представляет собой структурную схему, иллюстрирующую вариант выполнения системы 104 предотвращения столкновений. Как показано на Фиг. 2, система 104 предотвращения столкновений включает в себя менеджер 202 связи, процессор 204 и память 206. Менеджер 202 связи обеспечивает связь системы 104 предотвращения столкновений с другими системами, например, с системой 102 автоматизированного вождения/помощи. Процессор 204 исполняет различные инструкции для реализации функциональных возможностей, обеспечиваемых системой 104 предотвращения столкновений, как рассмотрено в настоящем документе. Память 206 хранит эти инструкции, а также другие данные, используемые процессором 204 и другими модулями и компонентами системы 104 предотвращения столкновений.
[0024] Дополнительно, система 104 предотвращения столкновений включает в себя модуль 208 обработки изображений, который принимает данные изображения от одной или более систем 110 камер и обнаруживает, например, другие транспортные средства, приближающиеся к основному транспортному средству (т.е. к транспортному средству, содержащему систему 104 предотвращения столкновений). В некоторых вариантах выполнения модуль 208 обработки изображений включает в себя алгоритм обнаружения столкновений, который обнаруживает потенциальное столкновение между основным транспортным средством и приближающимся сзади транспортным средством. Например, алгоритм обнаружения столкновений может определять расстояние между основным транспортным средством и приближающимся транспортным средством, а также скорость приближающегося транспортного средства. На основе расстояния и скорости приближающегося транспортного средства алгоритм обнаружения столкновений может определять вероятность столкновения между двумя транспортными средствами (например, вероятность того, что приближающееся транспортное средство столкнется с задней частью основного транспортного средства).
[0025] Модуль 210 обработки лидарных данных принимает лидарные данные от одной или более лидарных систем 108 и обнаруживает, например, потенциальное столкновение с другим транспортным средством. В некоторых вариантах выполнения алгоритм обнаружения столкновений обнаруживает приближающиеся сзади транспортные средства на основе лидарных данных. Кроме того, модуль 212 обработки радиолокационных данных принимает радиолокационные данные от одной или более радиолокационных систем 106 для обнаружения, например, потенциального столкновения с другим транспортным средством. В некоторых вариантах выполнения алгоритм обнаружения столкновений использует радиолокационные данные для обнаружения другого приближающегося сзади транспортного средства.
[0026] Система 104 предотвращения столкновений также включает в себя модуль 214 объединения данных датчиков, который объединяет данные от множества датчиков, камер и источников данных, которые рассмотрены в настоящем документе. Например, модуль 214 объединения данных датчиков может объединять данные от одной или более камер 110, радиолокационных систем 106 и лидарных систем 108 для обнаружения потенциального столкновения и определения возможных действий, которые могут предотвратить или смягчить потенциальное столкновение. Модуль 216 анализа данных выполняет различные операции с данными, принимаемыми от любого количества датчиков и/или источников данных, для определения вероятности столкновения между двумя транспортными средствами, как рассмотрено в настоящем документе.
[0027] Дополнительно, система 104 предотвращения столкновений включает в себя менеджер 218 автоматизации транспортного средства, который управляет работой различных функций автоматизации транспортного средства, рассмотренных в настоящем документе. Менеджер 218 автоматизации транспортного средства может работать независимо или в сочетании с системой 102 автоматизированного вождения/помощи. Менеджер 220 связи между транспортными средствами обеспечивает связь множества транспортных средств друг с другом. Например, транспортное средство может сообщать о потенциальном столкновении другим близлежащим транспортным средствам. Также транспортное средство может сообщать о своих предполагаемых действиях другим транспортным средствам, например, о смене полосы движения для предотвращения или смягчения потенциального столкновения. В некоторых вариантах выполнения транспортное средство может сообщать о потенциальном столкновении и/или о своих предполагаемых действиях инфраструктурной системе с использованием системы связи V2X (между транспортным средством и инфраструктурой).
[0028] Система 104 предотвращения столкновений также включает в себя модуль 222 обнаружения столкновений, который обнаруживает возможное столкновение с приближающимся транспортным средством. В некоторых вариантах выполнения модуль 222 обнаружения столкновений реализует алгоритм обнаружения столкновений (например, рассмотренный выше алгоритм), который обнаруживает потенциальное столкновение между основным транспортным средством и приближающимся сзади транспортным средством. Например, алгоритм обнаружения столкновений может использовать данные от одного или более датчиков транспортного средства для определения расстояния между основным транспортным средством и приближающимся транспортным средством, а также скорости приближающегося транспортного средства. На основе расстояния и скорости приближающегося транспортного средства алгоритм обнаружения столкновений может определять вероятность столкновения между двумя транспортными средствами (например, вероятность того, что приближающееся транспортное средство столкнется с задней частью основного транспортного средства).
[0029] Менеджер 224 работы транспортного средства управляет работой транспортного средства на основе обнаружения потенциального столкновения, например, остановкой транспортного средства или съездом транспортного средства на другую полосу движения проезжей части. В некоторых вариантах выполнения транспортное средство может съезжать на обочину (или край) проезжей части для предотвращения или смягчения потенциального столкновения. В некоторых вариантах выполнения менеджер 224 работы транспортного средства генерирует рекомендации по маневрированию транспортного средства на основе уровней автоматизированного вождения, доступных транспортному средству. Например, разные уровни автоматизированного вождения позволяют транспортному средству автономно выполнять определенные действия без участия водителя. В примерном варианте выполнения транспортные средства могут иметь один из трех разных уровней автоматизированного вождения, которые подробно описаны ниже.
[0030] Первый уровень автоматизированного вождения: система 102 автоматизированного вождения/помощи транспортного средства может автоматически управлять движением транспортного средства в пределах его текущей полосы движения, но не может изменять полосы движения.
[0031] Второй уровень автоматизированного вождения: система 102 автоматизированного вождения/помощи транспортного средства может выполнять действия 1-го уровня и может автоматически управлять движением транспортного средства на аварийную полосу движения или на обочину проезжей части.
[0032] Третий уровень автоматизированного вождения: система 102 автоматизированного вождения/помощи транспортного средства может выполнять действия 1-го и 2-го уровней, а также автоматически управлять движением транспортного средства на другую полосу движения.
[0033] В этом варианте выполнения менеджер 224 работы транспортного средства генерирует рекомендации по маневрированию транспортного средства на основе действий, допускаемых уровнем автоматизированного вождения, связанным с транспортным средством.
[0034] В конкретной реализации разные уровни автоматизированного вождения определены как уровни вождения SAE (Сообщества автомобильных инженеров). Например, в настоящее время SAE определило шесть уровней автоматизации вождения от уровня «без автоматизации» до уровня «полная автоматизация». В существующих уровнях SAE автоматизации вождения 5-ый уровень SAE является полностью автономным (подобно 3-му уровню, рассмотренному выше), 3-ий уровень SAE представляет собой условную автоматизацию (подобно 2-му уровню, рассмотренному выше) и 2-ой уровень SAE представляет собой частичную автоматизацию (подобно 1-му уровню, рассмотренному выше).
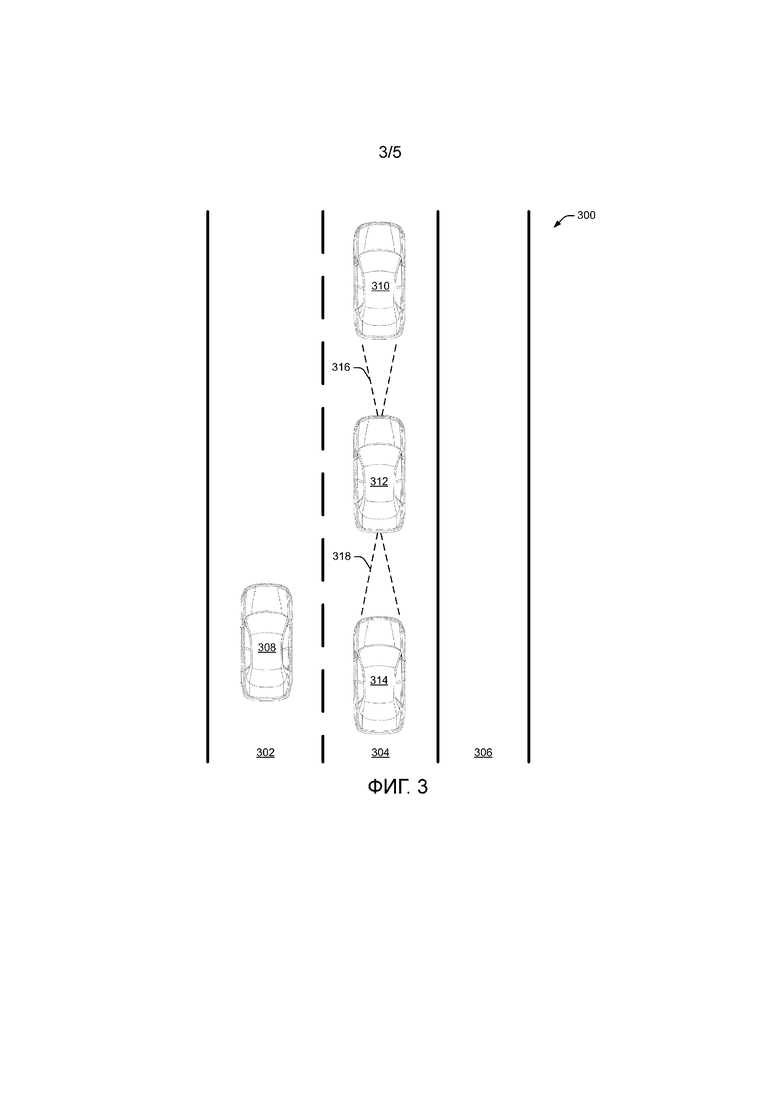
[0035] Фиг. 3 иллюстрирует проезжую часть 300 с множеством транспортных средств, движущихся в одном направлении. В примере, показанном на Фиг. 3, проезжая часть 300 имеет три полосы 302, 304, и 306 движения. Полосы 302 и 304 движения представляют собой полосы, предназначенные для движения в одном направлении. Полоса 306 движения представляет собой аварийную полосу движения или обочину проезжей части 300. Четыре транспортных средства 308, 310, 312 и 314 движутся по проезжей части 300. Транспортное средство 308 движется по полосе 302 движения, а транспортные средства 310, 312 и 314 движутся по полосе 304 движения. Как показано на Фиг. 3, по полосе 306 движения не движутся никакие транспортные средства (и не припаркованы на ней).
[0036] В примерной ситуации транспортное средство 310 внезапно останавливается (например, из-за препятствия на проезжей части 300 или внезапной остановки транспортного потока перед транспортным средством 310). В этой ситуации транспортное средство 312 должно быстро остановиться для предотвращения столкновения с транспортным средством 310. Один или более датчиков на транспортном средстве 312 (например, обращенные вперед датчики) принимают данные 316, связанные с местоположением и скоростью транспортного средства 310. Эти данные используются транспортным средством 312 для обнаружения внезапной остановки транспортного средства 310. При быстрой остановке транспортного средства 312 оно может уведомлять другие близлежащие транспортные средства об остановке, чтобы близлежащие транспортные средства могли предпринять соответствующие действия для предотвращения столкновения. В некоторых вариантах выполнения транспортное средство 312 уведомляет другие близлежащие транспортные средства об остановке с использованием системы связи V2V (между транспортными средствами) или любого другого механизма связи. Например, транспортное средство 314 может принимать сообщение по связи V2V и начинать остановку для предотвращения столкновения с транспортным средством 312. В некоторых вариантах выполнения, если транспортное средство 314 оборудовано системой связи V2V, транспортное средство 314 может уведомлять транспортное средство 312 о своем «состоянии применения тормозов» с использованием сообщения EEBL (электронных стоп-сигналов экстренного торможения). Система предотвращения столкновений транспортного средства 312 может использовать это сообщение от транспортного средства 314 (наряду с объединением данных датчиков от задних датчиков транспортного средства 312) для определения вероятности столкновения.
[0037] В некоторых вариантах выполнения один или более датчиков на транспортном средстве 312 (например, обращенные назад датчики) принимают данные 318, связанные с местоположением и скоростью транспортного средства 314. Эти данные используются транспортным средством 312 для определения вероятности столкновения транспортного средства 314 с задней частью транспортного средства 312. Если транспортное средство 312 определяет, что транспортное средство 314 вероятно столкнется с транспортным средством 312, оно может предпринимать действие для предотвращения или смягчения повреждения в результате столкновения. В варианте выполнения, показанном на Фиг. 3, транспортное средство 312 может: 1) автоматически перемещаться максимально близко к транспортному средству 310, тем самым обеспечивая транспортному средству 314 максимально возможное пространство для выполнения остановки до столкновения с транспортным средством 312; 2) автоматически управлять движением транспортного средства 312 на аварийную полосу движения/обочину 306, тем самым предотвращая столкновение с транспортным средством 314; или 3) автоматически управлять движением транспортного средства 312 на полосу 302 движения для предотвращения столкновения с транспортным средством 314. Как рассмотрено в настоящем документе, действия, доступные транспортному средству 312, могут варьироваться в зависимости от уровней автоматизированного вождения, доступных транспортному средству 312. Например, если транспортному средству 312 не доступен съезд на другую полосу движения, доступные ему действия ограничены остановкой на полосе 304 движения (перемещением максимально близко к транспортному средству 310) или съездом на аварийную полосу движения/обочину 306. Действие, выполняемое транспортным средством 312, сообщается другим близлежащим транспортным средствам (например, транспортным средствам 308, 310 и 314), чтобы они могли предпринять какие-либо необходимые действия на основе действия, выполняемого транспортным средством 312.
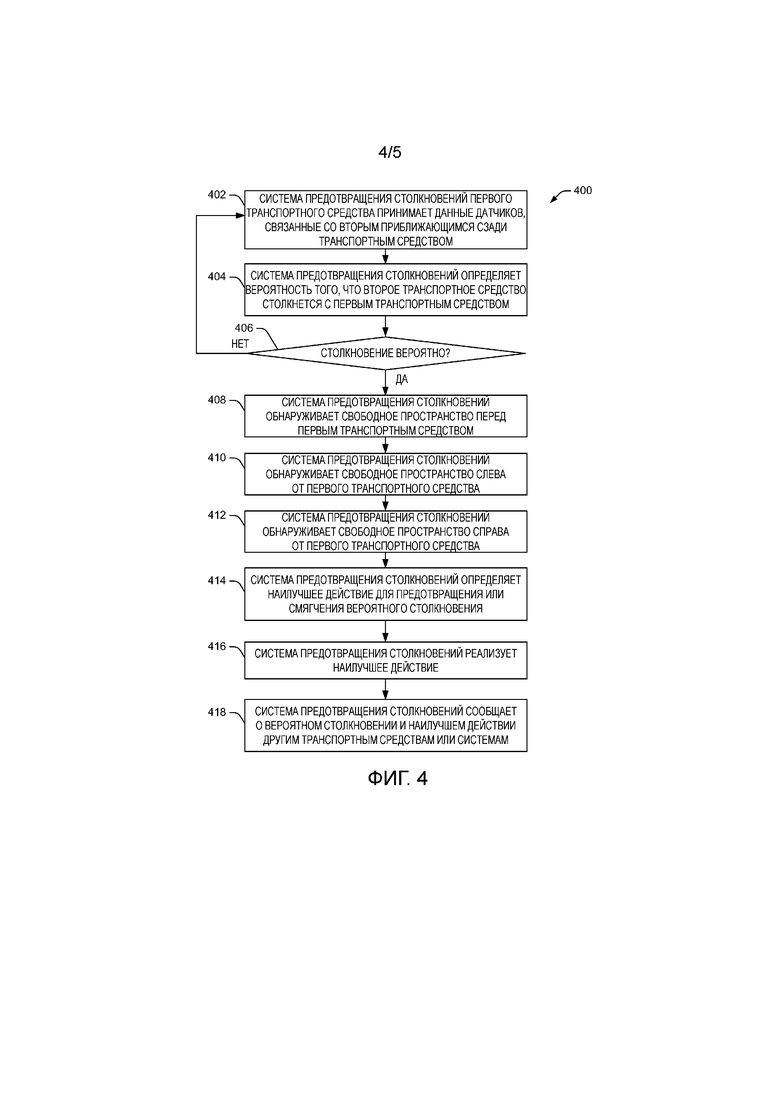
[0038] Фиг. 4 иллюстрирует вариант выполнения способа 400 обнаружения и предотвращения столкновения между двумя транспортными средствами. Сначала на этапе 402 система предотвращения столкновений первого транспортного средства принимает данные датчиков, связанные со вторым приближающимся сзади транспортным средством. Данные датчиков включают в себя, например, одно или более из данных камер, лидарных данных, радиолокационных данных и ультразвуковых данных. На этапе 404 система предотвращения столкновений определяет вероятность того, что второе транспортное средство столкнется с первым транспортным средством. Если на этапе 406 способ 400 определяет, что столкновение маловероятно (например, второе транспортное средство останавливается и имеет достаточно времени для полной остановки до столкновения с первым транспортным средством), система предотвращения столкновений продолжает прием данных датчиков (этап 402).
[0039] Если на этапе 406 способ 400 определяет, что столкновение вероятно (например, второе транспортное средство не останавливается или не имеет достаточного пространства для полной остановки до столкновения с первым транспортным средством), на этапе 408 система предотвращения столкновений обнаруживает свободное пространство перед первым транспортным средством. На этапе 410 система предотвращения столкновений также обнаруживает свободное пространство слева от первого транспортного средства (например, на смежной полосе движения). Кроме того, на этапе 412 система предотвращения столкновений обнаруживает свободное пространство справа от первого транспортного средства, например, на смежной полосе движения или на обочине проезжей части. Далее на этапе 414 система предотвращения столкновений определяет наилучшее действие для предотвращения или смягчения вероятного столкновения. Например, система может определять, что наилучшее действие для первого транспортного средства заключается в смене полосы движения влево, смене полосы движения вправо или продвижении вперед максимально близко к транспортному средству перед первым транспортным средством. Продвижение вперед ближе к транспортному средству перед первым транспортным средством может не предотвращать аварию, но оно может смягчать тяжесть столкновения путем обеспечения второму транспортному средству максимально возможного пространства для замедления перед столкновением. После определения на этапе 414 наилучшего действия на этапе 416 система предотвращения столкновений реализует наилучшее действие. На этапе 418 система предотвращения столкновений сообщает о вероятном столкновении и наилучшем действии другим транспортным средствам или системам. Например, информация о столкновении и наилучшем действии может быть передана другим транспортным средствам с использованием системы связи V2V и передана инфраструктурным системам с использованием систем связи V2X. Кроме того, информация о таких действиях, как «применение тормозов», может быть передана от первого транспортного средства другим транспортным средствам или системам для предупреждения этих транспортных средств/систем о замедлении первого транспортного средства. Это позволяет другим транспортным средствам/системам предпринимать какие-либо необходимые действия на основе торможения, выполняемого первым транспортным средством.
[0040] Фиг. 5 иллюстрирует вариант выполнения способа 500 определения действия, выполнение которого предотвращает или смягчает потенциальное столкновение между двумя транспортными средствами. Сначала на этапе 502 система предотвращения столкновений обнаруживает свободное пространство перед первым транспортным средством, слева от первого транспортного средства и справа от первого транспортного средства. Далее на этапе 504 система предотвращения столкновений определяет уровни автоматизированного вождения, доступные первому транспортному средству. Примеры уровней автоматизированного вождения рассмотрены выше. Способ 500 продолжается на этапе 506, на котором система предотвращения столкновений определяет наилучшее действие для предотвращения или смягчения вероятного столкновения, которое доступно первому транспортному средству на основе доступных уровней автоматизированного вождения. Таким образом, система предотвращения столкновений не рассматривает действия, которые не доступны первому транспортному средству на основе поддерживаемых уровней автоматизированного вождения. На этапе 508 система предотвращения столкновений реализует наилучшее доступное действие и на этапе 510 сообщает о вероятном столкновении и наилучшем доступном действии другим транспортным средствам или системам. Как отмечено выше, информация о столкновении и наилучшем действии может быть передана другим транспортным средствам с использованием системы связи V2V и передана инфраструктурным системам с использованием систем связи V2X.
[0041] Хотя в настоящем документе описаны различные варианты выполнения настоящего изобретения, следует понимать, что они представлены исключительно путем примера, а не ограничения. Специалисту в области техники будет понятно, что различные изменения в форме и деталях могут быть выполнены без отклонения от замысла и объема охраны изобретения. Таким образом, широта и объем охраны настоящего изобретения не должны быть ограничены каким-либо из вышеописанных примерных вариантов выполнения, а должны быть определены только в соответствии со следующей далее формулой изобретения и ее эквивалентами. Описание в настоящем документе представлено в целях иллюстрации и описания. Оно не предназначено быть исчерпывающим или ограничивающим изобретение точной раскрытой формой. Многие модификации и изменения возможны в свете раскрытого замысла. Кроме того, следует отметить, что любая или все из альтернативных реализаций в настоящем документе могут использоваться в любом желаемом сочетании для образования дополнительных гибридных реализаций изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБНАРУЖЕНИЯ ПРЕПЯТСТВИЙ, РАСПОЛОЖЕННЫХ РЯДОМ С ТРАНСПОРТНЫМ СРЕДСТВОМ | 2018 |
|
RU2709334C2 |
| СПОСОБ И СИСТЕМА ПРЕДУПРЕЖДЕНИЯ О ПАРКОВОЧНОМ БАРЬЕРЕ НА ОСНОВАНИИ ИСТОРИИ ДВИЖЕНИЯ | 2016 |
|
RU2729137C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ ОПАСНЫХ ВЕТРОВЫХ УСЛОВИЙ | 2018 |
|
RU2709363C2 |
| Способ управления роботизированным транспортным средством | 2021 |
|
RU2808469C2 |
| СПОСОБЫ И СИСТЕМЫ ДЛЯ АВТОМАТИЗИРОВАННОГО ОПРЕДЕЛЕНИЯ ПРИСУТСТВИЯ ОБЪЕКТОВ | 2019 |
|
RU2769921C2 |
| СПОСОБ, СИСТЕМА И МАШИНОЧИТАЕМЫЕ НОСИТЕЛИ ХРАНЕНИЯ ДАННЫХ ДЛЯ ОБНАРУЖЕНИЯ ЛИСТВЫ С ИСПОЛЬЗОВАНИЕМ ДАННЫХ ДАЛЬНОСТИ | 2017 |
|
RU2707695C2 |
| ФОРМИРОВАНИЕ МОДЕЛИРОВАННЫХ ДАННЫХ ДАТЧИКОВ ДЛЯ ОБУЧЕНИЯ И ПРОВЕРКИ ДОСТОВЕРНОСТИ МОДЕЛЕЙ ОБНАРУЖЕНИЯ | 2017 |
|
RU2694154C2 |
| СИСТЕМА И СПОСОБ ОБНАРУЖЕНИЯ ПРЕПЯТСТВИЙ | 2015 |
|
RU2706859C2 |
| УСТРОЙСТВО ДЛЯ ОБЕСПЕЧЕНИЯ ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЙ | 2016 |
|
RU2654839C2 |
| ОБНАРУЖЕНИЕ ПЕШЕХОДОВ, КОГДА ТРАНСПОРТНОЕ СРЕДСТВО ДВИЖЕТСЯ ЗАДНИМ ХОДОМ | 2017 |
|
RU2708469C2 |
Изобретение относится к системам безопасности транспортных средств. Способ предотвращения столкновений содержит этапы, на которых: получают данные от множества датчиков, установленных на первом транспортном средстве, определяют посредством системы предотвращения столкновений вероятность того, что второе транспортное средство столкнется с задней частью первого транспортного средства, на основе принимаемых данных и, в ответ на определение вероятности столкновения, обнаруживают свободное пространство вблизи первого транспортного средства, определяют уровни автоматизированного вождения, доступные первому транспортному средству, определяют наилучшее действие для предотвращения или смягчения вероятного столкновения на основе обнаруженного свободного пространства. Определение наилучшего действия для предотвращения или смягчения вероятного столкновения дополнительно основано на уровнях автоматизированного вождения, доступных первому транспортному средству. Достигается повышение безопасности транспортного средства. 3 н. и 15 з.п. ф-лы, 5 ил.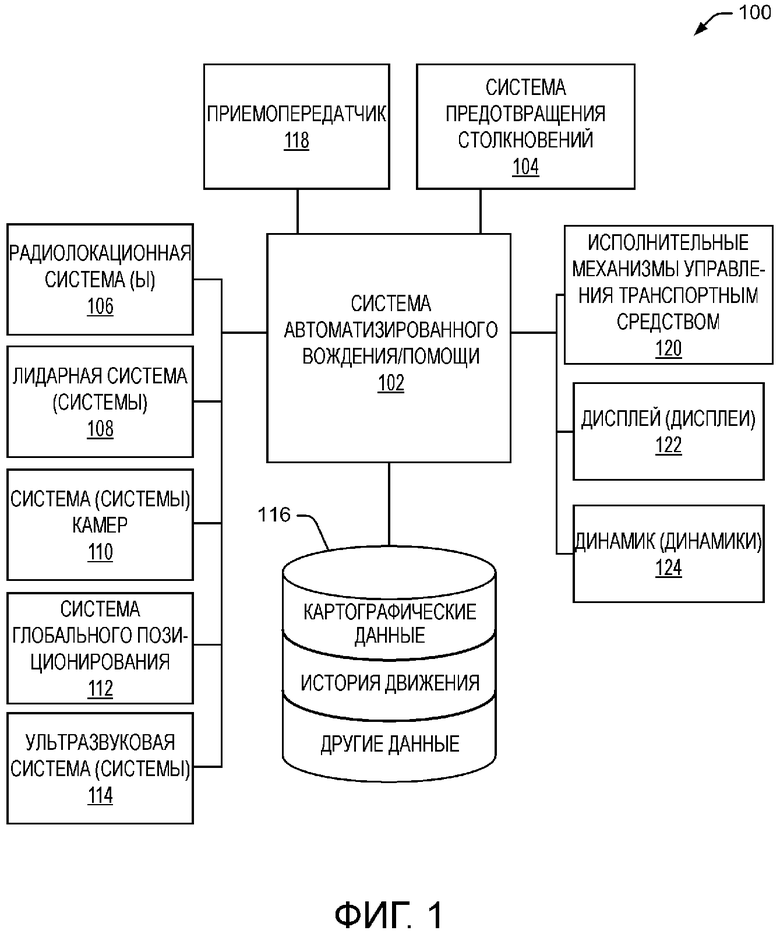
1. Способ предотвращения столкновений, содержащий этапы, на которых:
принимают данные от множества датчиков, установленных на первом транспортном средстве;
определяют посредством системы предотвращения столкновений вероятность того, что второе транспортное средство столкнется с задней частью первого транспортного средства, на основе принимаемых данных; и
в ответ на определение вероятности столкновения:
обнаруживают свободное пространство вблизи первого транспортного средства;
определяют уровни автоматизированного вождения, доступные первому транспортному средству;
определяют наилучшее действие для предотвращения или смягчения вероятного столкновения на основе обнаруженного свободного пространства; и
причем определение наилучшего действия для предотвращения или смягчения вероятного столкновения дополнительно основано на уровнях автоматизированного вождения, доступных первому транспортному средству.
2. Способ по п. 1, в котором множество датчиков включает в себя одно или более из лидарного датчика, радиолокационного датчика и камеры.
3. Способ по п. 1, в котором обнаружение свободного пространства вблизи первого транспортного средства включает в себя:
обнаружение свободного пространства перед первым транспортным средством;
обнаружение свободного пространства слева от первого транспортного средства и
обнаружение свободного пространства справа от первого транспортного средства.
4. Способ по п. 3, в котором наилучшее действие для предотвращения или смягчения вероятного столкновения включает в себя движение первого транспортного средства вперед на свободное пространство перед первым транспортным средством.
5. Способ по п. 3, в котором наилучшее действие для предотвращения или смягчения вероятного столкновения включает в себя движение транспортного средства на свободное пространство слева от первого транспортного средства.
6. Способ по п. 3, в котором наилучшее действие для предотвращения или смягчения вероятного столкновения включает в себя движение транспортного средства на свободное пространство справа от первого транспортного средства.
7. Способ по п. 1, дополнительно содержащий этап, на котором реализуют наилучшее действие для предотвращения или смягчения вероятного столкновения.
8. Способ по п. 1, дополнительно содержащий этап, на котором сообщают о вероятном столкновении и наилучшем действии другим транспортным средствам вблизи первого транспортного средства.
9. Способ по п. 1, дополнительно содержащий этап, на котором сообщают о вероятном столкновении и наилучшем действии инфраструктурной системе.
10. Способ по п. 1, в котором определение вероятности столкновения включает в себя:
определение расстояния между первым транспортным средством и вторым транспортным средством;
определение скорости второго транспортного средства и
определение вероятности того, что второе транспортное средство сможет остановиться до столкновения с первым транспортным средством, на основе расстояния и скорости.
11. Способ по п. 1, в котором первое транспортное средство представляет собой автономное транспортное средство.
12. Способ предотвращения столкновений, содержащий этапы, на которых:
принимают, посредством системы предотвращения столкновений, данные от множества датчиков, установленных на первом транспортном средстве;
определяют, посредством системы предотвращения столкновений, вероятность того, что второе транспортное средство столкнется с задней частью первого транспортного средства, на основе принимаемых данных; и
в ответ на определение вероятности столкновения:
определяют, посредством системы предотвращения столкновений, уровни автоматизированного вождения, доступные первому транспортному средству;
обнаруживают, посредством системы предотвращения столкновений, свободное пространство вблизи первого транспортного средства;
определяют, посредством системы предотвращения столкновений, наилучшее действие для предотвращения или смягчения вероятного столкновения на основе обнаруженного свободного пространства и уровней автоматизированного вождения, доступных первому транспортному средству;
реализуют наилучшее действие для предотвращения или смягчения вероятного столкновения и
сообщают о вероятном столкновении и наилучшем действии другим транспортным средствам вблизи первого транспортного средства.
13. Способ по п. 12, в котором обнаружение свободного пространства вблизи первого транспортного средства включает в себя:
обнаружение свободного пространства перед первым транспортным средством;
обнаружение свободного пространства слева от первого транспортного средства и
обнаружение свободного пространства справа от первого транспортного средства.
14. Способ по п. 13, в котором определение наилучшего действия для предотвращения или смягчения вероятного столкновения включает в себя одно из:
движения первого транспортного средства вперед на свободное пространство перед первым транспортным средством;
движения первого транспортного средства на свободное пространство слева от первого транспортного средства и
движения первого транспортного средства на свободное пространство справа от первого транспортного средства.
15. Способ по п. 12, дополнительно содержащий этап, на котором реализуют наилучшее действие для предотвращения или смягчения вероятного столкновения.
16. Способ по п. 12, дополнительно содержащий этап, на котором сообщают о вероятном столкновении и наилучшем действии другим транспортным средствам вблизи первого транспортного средства.
17. Устройство предотвращения столкновений, содержащее:
множество датчиков, установленных на первом транспортном средстве и выполненных с возможностью захвата данных датчиков;
множество исполнительных механизмов управления транспортным средством, выполненных с возможностью регулировки работы первого транспортного средства; и
систему предотвращения столкновений, связанную с множеством датчиков и множеством исполнительных механизмов управления транспортным средством, причем система предотвращения столкновений выполнена с возможностью приема и анализа данных датчиков для определения вероятности того, что второе транспортное средство столкнется с задней частью первого транспортного средства, причем система предотвращения столкновений дополнительно выполнена с возможностью, в ответ на определение вероятного столкновения:
обнаружения свободного пространства вблизи первого транспортного средства; и
определения наилучшего действия для предотвращения или смягчения вероятного столкновения на основе обнаруженного свободного пространства;
реализации наилучшего действия для предотвращения или смягчения вероятного столкновения; и
сообщения о вероятном столкновении и наилучшем действии другим транспортным средствам вблизи первого транспортного средства.
18. Устройство по п. 17, в котором множество датчиков включает в себя одно или более из лидарного датчика, радиолокационного датчика и камеры.
| US 8620549 B2, 31.12.2013 | |||
| US 7994902 B2, 09.08.2011 | |||
| ПРОГНОЗИРУЮЩИЙ ЧЕЛОВЕКО-МАШИННЫЙ ИНТЕРФЕЙС С ИСПОЛЬЗОВАНИЕМ ТЕХНОЛОГИИ ОБНАРУЖЕНИЯ ВЗГЛЯДА, ИНДИКАТОРОВ "МЕРТВЫХ" ЗОН И ВОДИТЕЛЬСКОГО ОПЫТА | 2010 |
|
RU2514924C2 |

