Область техники, к которой относится изобретение
[0001] Настоящее изобретение, в целом, относится к предупреждениям о столкновении, а более конкретно, к предупреждениям о столкновении транспортного средства на основе времени до столкновения.
Уровень техники
[0002] Как правило, водители транспортных средств беспокоятся о столкновении с другими объектами (например, другими транспортными средствами). Например, многие водители беспокоятся о столкновении с объектом позади транспортного средства во время движения транспортного средства задним ходом (например, во время параллельной парковки, во время выезда задним ходом с парковочного места и т.д.). Некоторые транспортные средства включают в себя камеру заднего хода, которая захватывает изображения области около задней части транспортного средства. Изображения, захваченные камерой заднего вида, отображаются через экран, расположенный на приборной панели или в центральной консоли транспортного средства, чтобы улучшать видимость области позади транспортного средства для водителя и, таким образом, содействовать водителю, чтобы избегать столкновения с объектом, расположенным позади транспортного средства.
Сущность изобретения
[0003] Прилагаемая формула изобретения определяет эту заявку. Настоящее раскрытие сущности обобщает аспекты вариантов осуществления и не должно использоваться для того, чтобы ограничивать формулу изобретения. Предполагаются другие реализации в соответствии с технологиями, описанными в данном документе, как будет очевидно обычному специалисту в области техники после изучения последующих чертежей и подробного описания, и такие реализации предназначены быть в рамках этой заявки.
[0004] Примерные варианты осуществления показаны для предупреждения о столкновении транспортного средства на основе времени до столкновения. Примерное раскрытое транспортное средство включает в себя датчик, чтобы обнаруживать объект, датчик скорости, чтобы измерять текущую скорость, и средство оповещения о столкновении. Примерное средство оповещения о столкновении должно определять расстояние до объекта и определять время до столкновения на основе расстояния и текущей скорости. Также, примерное средство оповещения о столкновении должно издавать, в ответ на время до столкновения, меньшее или равное первому пороговому значению до столкновения, первый предупредительный сигнал, ассоциированный с первым пороговым значением до столкновения.
В дополнительном аспекте первый предупредительный сигнал включает в себя непрерывный звуковой сигнал.
В другом дополнительном аспекте средство оповещения о столкновении дополнительно издает первый предупредительный сигнал в ответ на определение средством оповещения о столкновении, что расстояние до объекта меньше или равно пороговому расстоянию.
В еще одном дополнительном аспекте средство оповещения о столкновении издает первый предупредительный сигнал, чтобы способствовать замедлению для уменьшения удара столкновения с объектом.
В еще одном дополнительном аспекте датчик является ультразвуковым датчиком.
В еще одном дополнительном аспекте в ответ на время до столкновения, большее, чем первое пороговое значение до столкновения, средство оповещения о столкновении выполнено с возможностью: определять прогнозируемую скорость; и сравнивать прогнозируемую скорость и текущую скорость.
В еще одном дополнительном аспекте транспортное средство дополнительно включает в себя датчик педали, чтобы измерять динамические параметры педали для педали.
В еще одном дополнительном аспекте средство оповещения о столкновении определяет прогнозируемую скорость на основе текущей скорости и динамических параметров педали.
В еще одном дополнительном аспекте в ответ на прогнозируемую скорость, меньшую или равную текущей скорости, средство оповещения о столкновении сравнивает время до столкновения со вторым пороговым значением до столкновения, которое больше первого порогового значения до столкновения.
В еще одном дополнительном аспекте в ответ на время до столкновения, меньшее или равное второму пороговому значению до столкновения, средство оповещения о столкновении выполнено с возможностью издавать второй предупредительный сигнал, ассоциированный со вторым пороговым значением до столкновения.
В еще одном дополнительном аспекте второй предупредительный сигнал включает в себя прерывистый звуковой сигнал.
[0005] Примерный раскрытый способ, чтобы издавать предупреждение о столкновении транспортного средства, включает в себя обнаружение объекта через датчик транспортного средства, определение расстояния до объекта и измерение текущей скорости транспортного средства через датчик скорости. Примерный способ также включает в себя определение, через процессор, время до столкновения на основе расстояния и текущей скорости и выдачу первого предупреждения в ответ на время до столкновения, меньшее или равное первому пороговому значению до столкновения.
В дополнительном аспекте выдача первого предупредительного сигнала включает в себя этап, на котором издают непрерывный тональный сигнал через громкоговоритель транспортного средства.
В другом дополнительном аспекте способ дополнительно включает в себя этап, на котором издают первый предупредительный сигнал в ответ на определение, что расстояние до объекта меньше или равно пороговому расстоянию.
В еще одном дополнительном аспекте способ дополнительно включает в себя этапы, на которых: определяют, в ответ на время до столкновения, большее, чем первое пороговое значение до столкновения, прогнозируемую скорость транспортного средства; и сравнивают прогнозируемую скорость и текущую скорость.
В еще одном дополнительном аспекте определение прогнозируемой скорости включает в себя этап, на котором измеряют динамические параметры педали для педали транспортного средства.
В еще одном дополнительном аспекте способ дополнительно включает в себя этап, на котором сравнивают, в ответ на прогнозируемую скорость, меньшую или равную текущей скорости, время до столкновения со вторым пороговым значением до столкновения, которое больше первого порогового значения до столкновения.
В еще одном дополнительном аспекте способ дополнительно включает в себя этап, на котором, в ответ на время до столкновения, меньшее или равное второму пороговому значению до столкновения, издают второй предупредительный сигнал, ассоциированный со вторым пороговым значением до столкновения.
В еще одном дополнительном аспекте этап, на котором издают второй предупредительный сигнал, включает в себя этап, на котором издают прерывистый звуковой сигнал.
[0006] Примерный материальный компьютерный носитель хранения включает в себя инструкции, которые, когда исполняются, инструктируют машине обнаруживать объект через датчик транспортного средства, определять расстояние до объекта и измерять текущую скорость транспортного средства через датчик скорости. Примерные инструкции также инструктируют машине определять, через процессор, время до столкновения на основе расстояния и текущей скорости и выдавать первый предупредительный сигнал в ответ на время до столкновения, меньшее или равное первому пороговому значению до столкновения.
Краткое описание чертежей
[0007] Для лучшего понимания изобретения ссылка может быть сделана на варианты осуществления, показанные на следующих чертежах. Компоненты на чертежах необязательно начерчены по масштабу, и связанные элементы могут быть опущены, или в некоторых случаях пропорции могут быть преувеличены, с тем, чтобы подчеркивать и ясно иллюстрировать новые признаки, описанные в данном документе. Кроме того, компоненты системы могут быть по-разному размещены, как известно в области техники. Кроме того, на чертежах одинаковые ссылочные номера обозначают соответствующие части повсюду на нескольких видах.
[0008] Фиг. 1 иллюстрирует транспортное средство, включающее в себя примерное средство оповещения о столкновении в соответствии с учениями в данном документе.
[0009] Фиг. 2 - это график, изображающий первое пороговое значение до столкновения и второе пороговое значение до столкновения, используемые средством оповещения о столкновении на фиг. 1.
[0010] Фиг. 3 - это блок-схема электронных компонентов транспортного средства на фиг. 1.
[0011] Фиг. 4 - это блок-схема последовательности операций примерного способа, чтобы предупреждать водителя транспортного средства на фиг. 1 о потенциальном столкновении через средство оповещения о столкновении на фиг. 2.
Подробное описание примерных вариантов осуществления
[0012] В то время как изобретение может быть осуществлено в различных формах, показаны на чертежах, и будут далее в данном документе описаны, некоторые примерные и неограничивающие варианты осуществления с пониманием, что настоящее изобретение должно рассматриваться как иллюстрация изобретения и не предназначено, чтобы ограничивать изобретение конкретными иллюстрированными вариантами осуществления.
[0013] Водители транспортных средств в типичном варианте беспокоятся о столкновении с другими объектами (например, другими транспортными средствами). В частности, многие водители беспокоятся о столкновении с объектом позади транспортного средства, в то время как транспортное средство движется задним ходом. Например, столкновения с другими транспортными средствами потенциально могут происходить во время параллельной парковки и/или во время выезда задним ходом с парковочного места. Чтобы избегать столкновений во время движения задним ходом, некоторые транспортные средства включают в себя камеру заднего вида, которая захватывает изображения области около задней части транспортного средства. Изображения, захваченные камерой заднего вида, отображаются через экран, расположенный на приборной панели или в центральной консоли транспортного средства, чтобы улучшать видимость области позади транспортного средства для водителя и, таким образом, содействовать водителю, чтобы избегать столкновения с объектом, расположенным позади транспортного средства. Однако, в некоторых таких случаях, водитель транспортного средства может не смотреть на экран во время вождения транспортного средства при движении задним ходом.
[0014] Примерное устройство, способы и компьютерно-читаемые носители, раскрытые в данном документе, определяют время до столкновения между транспортным средством и расположенным поблизости объектом и предоставляют предупреждение водителю на основе времени до столкновения. Если вычисленное время до столкновения меньше первого порогового значения до столкновения, транспортное средство выдает первый предупредительный сигнал (например, непрерывный звуковой сигнал), чтобы предупреждать водителя о потенциально грозящем столкновении с близким объектом. Альтернативно, если вычисленное время до столкновения меньше второго порогового значения до столкновения, но больше первого порогового значения до столкновения, транспортное средство издает второй предупредительный сигнал (например, прерывистый звуковой сигнал), чтобы предупреждать водителя о потенциальном столкновении, которое является менее угрожающим, чем столкновение, ассоциированное с первым предупредительным сигналом.
[0015] Примерное транспортное средство, раскрытое в данном документе, включает в себя датчик (например, ультразвуковой датчик), чтобы обнаруживать и определять местоположение близкого объекта, и датчик скорости, чтобы измерять текущую скорость транспортного средства. Примерное транспортное средство также включает в себя средство оповещения о столкновении, которое определяет расстояние между транспортным средством и объектом. Дополнительно, средство оповещения о столкновении определяет время до столкновения на основе текущей скорости транспортного средства и расстояния между транспортным средством и объектом. Средство оповещения о столкновении также сравнивает время до столкновения с первым пороговым значением до столкновения, которое ассоциируется с потенциально угрожающим столкновением. В ответ на время до столкновения, меньшее или равное первому пороговому значению до столкновения, средство оповещения о столкновении издает первый предупредительный сигнал (например, непрерывный звуковой сигнал), чтобы предупреждать водителя о потенциально грозящем столкновении. Средство предупреждения о столкновении также может издавать первый предупредительный сигнал в ответ на определение средством предупреждения о столкновении, что транспортное средство находится в пределах порогового расстояния (например, 0,03 метра или 1,18 дюйма) до объекта. Предоставляя первый предупредительный сигнал, средство оповещения о столкновении содействует водителю, чтобы замедлять транспортное средство, чтобы уменьшать (например, устранять) удар столкновения с обнаруженным объектом.
[0016] Когда время до столкновения не меньше или равно (например, больше) первому пороговому значению до столкновения, средство оповещения о столкновении определяет прогнозируемую скорость транспортного средства. Прогнозируемая скорость может отличаться от текущей скорости, если транспортное средство ускоряется или замедляется. Например, датчик педали наблюдает за педалью газа и/или педалью тормоза транспортного средства, чтобы измерять динамические параметры педали, и средство предупреждения о столкновении определяет прогнозируемую скорость на основе текущей скорости и динамических параметров педали транспортного средства. После определения прогнозируемой скорости средство предупреждения о столкновении сравнивает прогнозируемую скорость с текущей скоростью. Если прогнозируемая скорость больше текущей скорости, средство предупреждения о столкновении корректирует время до столкновения на основе прогнозируемой скорости. Иначе, если прогнозируемая скорость меньше или равна текущей скорости, средство оповещения о столкновении сравнивает время до столкновения со вторым пороговым значением до столкновения. Средство оповещения о столкновении издает второй предупредительный сигнал (например, прерывистый звуковой сигнал) в ответ на время до столкновения, меньшее или равное второму пороговому значению до столкновения. Второе пороговое значение до столкновения (например, 2,5 секунды) больше первого порогового значения до столкновения (например, 0,7 секунд), так что второе пороговое значение до столкновения ассоциируется с менее угрожающим потенциальным столкновением, чем потенциальное столкновение для первого порогового значения до столкновения. Таким образом, примерное транспортное средство, раскрытое в данном документе, издает первый предупредительный сигнал (например, непрерывный звуковой сигнал), чтобы предупреждать водителя о грозящем потенциальном столкновении, и издает второй предупредительный сигнал (например, прерывистый звуковой сигнал), чтобы предупреждать водителя, если потенциальное столкновение является менее угрожающим.
[0017] Обращаясь к чертежам, фиг. 1 иллюстрирует транспортное средство 100, которое оповещается о потенциальном столкновении с другим транспортным средством 102 в соответствии с учениями в данном документе. Транспортное средство 100 и/или транспортное средство 102 могут быть стандартным транспортным средством с бензиновым двигателем, гибридным транспортным средством, электрическим транспортным средством, транспортным средством на топливных элементах и/или любым другим типом реализации мобильности транспортного средства. Транспортные средства 100, 102 включают в себя части, связанные с мобильностью, такие как силовая передача с двигателем, коробка передач, подвеска, приводной вал и/или колеса и т.д. Транспортные средства 100, 102 могут быть неавтономными, полуавтономными (например, некоторые рутинные функции движения управляются посредством соответствующего транспортного средства 100, 102) или автономными (например, функции движения управляются посредством соответствующего транспортного средства 100, 102 без непосредственного входного воздействия водителя).
[0018] В иллюстрированном примере транспортное средство 100 включает в себя датчик 104, который наблюдает область вокруг транспортного средства 100. Датчик 104 обнаруживает объект рядом с транспортным средством 102 (например, транспортное средство 100) и собирает данные, которые предоставляют возможность определения местоположения объекта относительно транспортного средства 100. Датчик 104 может быть радиолокационным датчиком (например, радиолокационным датчиком 316 на фиг. 3), лидарным датчиком (например, лидарным датчиком 318 на фиг. 3), ультразвуковым датчиком (например, ультразвуковым датчиком 320 на фиг. 3), камерой (например, камерой 322 на фиг. 3) и/или любым другим устройством, которое обнаруживает и идентифицирует относительное местоположение близкого объекта. Например, датчик 104 может обнаруживать объекты в диапазоне около 2,2 метра (86,6 дюйма), когда датчик 104 является ультразвуковым датчиком. Дополнительно, в иллюстрированном примере, датчик 104 является датчиком заднего хода, который наблюдает за областью позади транспортного средства 100. Дополнительно или альтернативно, транспортное средство может включать в себя датчик, который наблюдает за областью впереди и/или сбоку от транспортного средства 100.
[0019] Транспортное средство 100 иллюстрированного примера также включает в себя датчик 106 скорости и датчик 108 педали. Датчик 106 скорости определяет текущую скорость транспортного средства 100, а датчик 108 педали измеряет динамические параметры педали транспортного средства 100. Например, датчик 108 педали наблюдает за педалью газа и/или педалью тормоза транспортного средства 100, чтобы определять, будет ли и до какой степени транспортное средство 100 ускоряться и/или замедляться. В некоторых примерах датчик 108 педали является датчиком положения педали акселератора, который наблюдает за позицией (например, угловой позицией) педали транспортного средства, чтобы определять предстоящее ускорение и/или замедление транспортного средства 100.
[0020] Как иллюстрировано на фиг. 1, транспортное средство 100 включает себя громкоговоритель 110 и дисплей 112 (например, экран, монитор и т.д.). Например, громкоговоритель 110 воспроизводит звуковые сигналы, а дисплей воспроизводит визуальные сигналы для водителя и/или пассажира(ов) водителя в информационных и/или развлекательных целях.
[0021] Дополнительно, транспортное средство 100 иллюстрированного примера включает в себя средство 114 оповещения о столкновении, которое определяет время до столкновения для потенциального столкновения между транспортным средством 100 и близким объектом (например, транспортным средством 102) и предоставляет предупреждение водителю на основе времени до столкновения. Например, транспортное средство 100 на фиг. 1 находится на расстоянии 116 от транспортного средства 102 и движется в направлении 118 к транспортному средству 102. В эксплуатации средство 114 оповещения о столкновении определяет расстояние 116 между транспортным средством 100 и транспортным средством 102 на основе данных, собранных посредством датчика 104. На основе расстояния и текущей скорости транспортного средства 100 средство 114 оповещения о столкновении определяет время до столкновения для потенциального столкновения между транспортными средствами 100, 102.
[0022] Средство 114 оповещения о столкновении сравнивает время до столкновения с первым пороговым значением до столкновения. Первое пороговое значение до столкновения является продолжительностью времени (например, 0,7 секунды), которая включает в себя время для неизбежных задержек, связанных с предоставлением возможности водителю замедлять транспортное средство 100 при приеме предупреждения о потенциальном столкновении. Например, первое пороговое значение до столкновения учитывает время, которое тратит средство 114 оповещения о столкновении, чтобы обнаруживать объект и издавать предупредительный сигнал на основе этого объекта, водитель, чтобы реагировать на предупредительный сигнал, приводя в действие педаль тормоза, и/или тормозная система транспортного средства 100, чтобы замедлять транспортное средство на основе срабатывания педали акселератора.
[0023] Когда время до столкновения меньше или равно первому пороговому значению до столкновения, средство 114 оповещения о столкновении издает первый предупредительный сигнал, ассоциированный с первым пороговым значением до столкновения, чтобы предупреждать водителя о потенциально грозящем столкновении с транспортным средством 102. В некоторых примерах первый предупредительный сигнал включает в себя звуковой сигнал, издаваемый громкоговорителем 110. Дополнительно или альтернативно, первый предупредительный сигнал включает в себя визуальный сигнал, представляемый через дисплей 112. Средство 114 оповещения о столкновении издает первый предупредительный сигнал, чтобы предоставлять возможность водителю уменьшать (например, устранять) удар столкновения с транспортным средством 102, обеспечивая замедление транспортного средства 100. Например, услышав первый предупредительный сигнал, водитель замедляет транспортное средство 100, чтобы избегать потенциального столкновения с транспортным средством 102. В некоторых примерах средство 114 оповещения о столкновении также издает первый предупредительный сигнал, когда средство 114 оповещения о столкновении определяет, что расстояние 116 между транспортными средствами 100, 102 меньше или равно пороговому расстоянию (например, 0,3 метра или 11,8 дюйма).
[0024] Иначе, когда время до столкновения больше первого порогового значения до столкновения, средство 114 оповещения о столкновении определяет прогнозируемую скорость транспортного средства 100 на основе текущей скорости и динамических параметров педали. Затем, средство 114 оповещения о столкновении сравнивает прогнозируемую скорость с текущей скоростью. Когда прогнозируемая скорость больше текущей скорости, средство 114 оповещения о столкновении корректирует время до столкновения на основе прогнозируемой скорости. Иначе, если прогнозируемая скорость меньше или равна текущей скорости, средство 114 оповещения о столкновении сравнивает время до столкновения со вторым пороговым значением до столкновения. Второе пороговое значение до столкновения является продолжительностью времени (например, 2,5 секунды), которая больше первого порогового значения до столкновения. Таким образом, второе пороговое значение до столкновения включает в себя дополнительное время помимо времени неустранимых задержек, связанных с предоставлением возможности водителю замедлять транспортное средство 100 при приеме предупреждения.
[0025] Когда время до столкновения меньше или равно второму пороговому значению до столкновения, средство 114 оповещения о столкновении издает второй предупредительный сигнал, ассоциированный со вторым пороговым значением до столкновения, чтобы предупреждать водителя о потенциально грозящем столкновении с транспортным средством 102. В некоторых примерах второй предупредительный сигнал включает в себя звуковой сигнал, издаваемый громкоговорителем 110. Дополнительно или альтернативно, второй предупредительный сигнал включает в себя визуальный сигнал, представляемый через дисплей 112. Средство 114 оповещения о столкновении издает второй предупредительный сигнал, чтобы предоставлять возможность водителю обеспечивать замедление транспортного средства 100, чтобы уменьшать (например, устранять) удар столкновения с транспортным средством 102.
[0026] Поскольку второе пороговое значение до столкновения больше первого порогового значения до столкновения, второй предупредительный сигнал предоставляет водителю больше времени на реакцию на потенциальное столкновение. Таким образом, средство 114 оповещения о столкновении издает второй предупредительный сигнал, чтобы предупреждать водителя о потенциальных столкновениях, которые являются менее угрожающими, чем потенциальные столкновения, ассоциированные с первым предупредительным сигналом. Чтобы предоставлять возможность водителю транспортного средства 100 различать между двумя предупредительным сигналами (и потенциальными столкновениями, ассоциированными с соответствующими предупредительным сигналами), первый предупредительный сигнал отличается от второго предупредительного сигнала. Например, первый предупредительный сигнал включает в себя непрерывный звуковой сигнал (например, непрерывный тональный сигнал), издаваемый громкоговорителем 110, а второй предупредительный сигнал включает в себя прерывистый звуковой сигнал (например, гудки), издаваемый громкоговорителем 110.
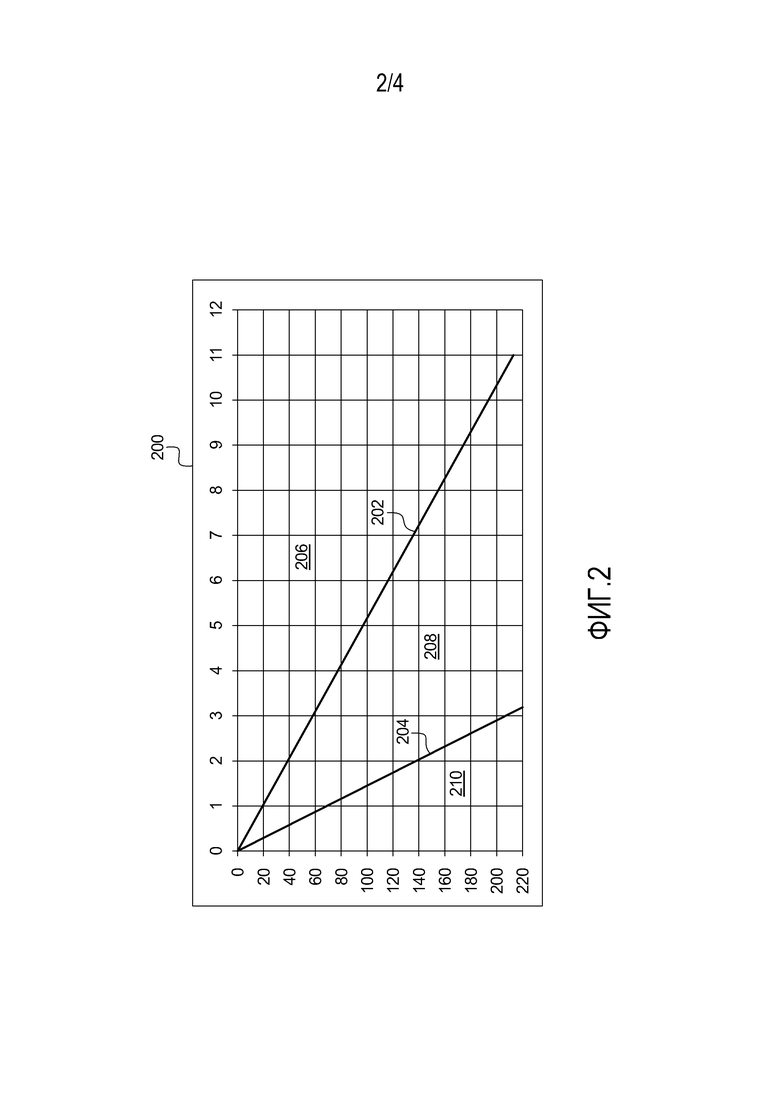
[0027] Фиг. 2 - это график 200, изображающий линию 202 первого порогового значения до столкновения и линию 204 второго порогового значения до столкновения. X-ось графика 200 представляет скорость транспортного средства 100 в километрах в час, а y-ось графика 200 представляет расстояние 116 между транспортным средством 100 и обнаруженным объектом (например, транспортным средством 102) в сантиметрах. В иллюстрированном примере линия 202 первого порогового значения до столкновения изображает первое пороговое значение до столкновения, равное 0,7 секунды, а линия 204 второго порогового значения до столкновения изображает второе пороговое значение до столкновения 2,5 секунды.
[0028] Как иллюстрировано на фиг. 2, первая область 206 графика 200 находится справа от линии 202 первого порогового значения до столкновения, вторая область 208 находится между линией 202 первого порогового значения до столкновения и линией 204 второго порогового значения до столкновения, и третья область 210 находится слева от линии 204 второго порогового значения до столкновения. Первая область 206 ассоциируется с потенциально угрожающими столкновениями, вторая область 208 ассоциируется с менее угрожающими потенциальными столкновениями, и третья область 210 ассоциируется с ситуациями, в которых потенциальное столкновение не является угрожающим. Таким образом, средство 114 оповещения о столкновении издает первый предупредительный сигнал для любой точки вдоль линии 202 первого порогового значения до столкновения или в первой области 206. Средство 114 оповещения о столкновении издает второй предупредительный сигнал для любой точки вдоль линии 204 второго порогового значения до столкновения или во второй области 208. Дополнительно, средство 114 оповещения о столкновении не издает предупредительный сигнал для любой точки в третьей области 210. Например, если транспортное средство 100 движется со скоростью 2 км/ч по направлению к обнаруженному объекту, средство 114 оповещения о столкновении издает первый предупредительный сигнал, если объект находится менее чем приблизительно в 39 сантиметрах от транспортного средства 100, издает второй предупредительный сигнал, если объект находится приблизительно между 39 и 139 сантиметрами от транспортного средства 100, и не издает предупредительный сигнал, если объект находится более чем приблизительно в 139 сантиметрах от транспортного средства 100.
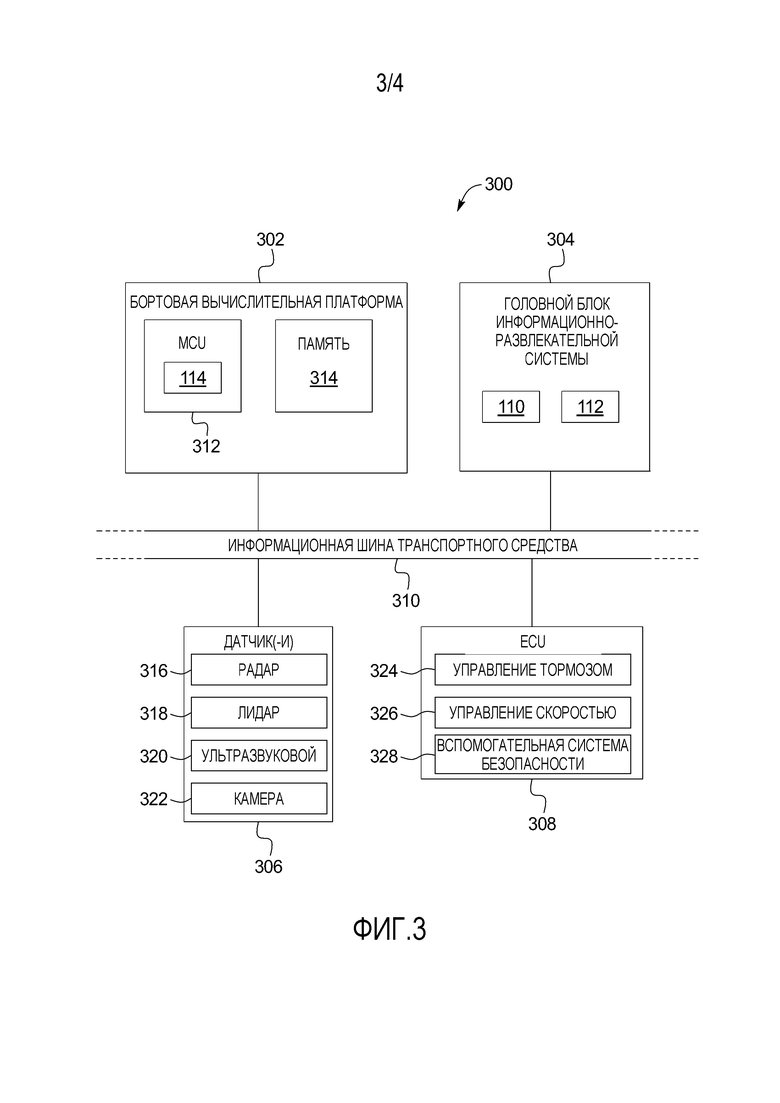
[0029] Фиг. 3 - это блок-схема электронных компонентов 300 транспортного средства 100. Как иллюстрировано на фиг. 3, электронные компоненты 300 включают в себя бортовую вычислительную платформу 302, и головное устройство 304 информационно-развлекательной системы, датчики 306, электронные блоки управления (ECU) 308 и информационную шину 310 транспортного средства.
[0030] Бортовая вычислительная платформа 302 включает в себя блок микроконтроллера, контроллер или процессор 312 и память 314. В некоторых примерах бортовая вычислительная платформа 302 структурируется, чтобы включать в себя средство 114 оповещения о столкновении. Альтернативно, в некоторых примерах, средство 114 оповещения о столкновении встраивается в другой электронный блок управления (ECU) со своим собственным процессором 312 и памятью 314. Процессор 312 может быть любым подходящим устройством обработки или набором устройств обработки, таких как, но не только, микропроцессор, платформа на основе микроконтроллера, интегральная схема, одна или более программируемых пользователем вентильных матриц (FPGA) и/или одна или более специализированных интегральных схем (ASIC). Память 314 может быть энергозависимой памятью (например, RAM, включающим в себя энергонезависимое RAM, магнитное RAM, ферроэлектрическое RAM и т.д.); энергонезависимой памятью (например, дисковой памятью, флэш-памятью, множеством EPROM, множеством EEPROM, мемристорной энергонезависимой твердотельной памятью и т.д.), неизменяемую память (например, множество EPROM), постоянное запоминающее устройство и/или запоминающие устройства высокой емкости (например, накопители на жестких дисках, твердотельные накопители и т.д.). В некоторых примерах память 314 включает в себя множество видов памяти, в частности, энергозависимую память и энергонезависимую память.
[0031] Память 314 является компьютерно-читаемыми носителями, на которые могут быть внедрены один или более наборов инструкций, таких как программное обеспечение для работы способов настоящего изобретения. Инструкции могут осуществлять один или более способов или логику, которая описана в данном документе. Например, инструкции находятся полностью, или, по меньшей мере, частично, в любом одном или более из памяти 314, компьютерно-читаемого носителя и/или в процессоре 312 во время исполнения инструкций.
[0032] Термины "нетранзиторный компьютерно-читаемый носитель" и "компьютерно-читаемый носитель" включают в себя единственный носитель или множество носителей, таких как централизованная или распределенная база данных и/или ассоциированные кэши и серверы, которые хранят один или более наборов инструкций. Дополнительно, термины "нетранзиторный компьютерно-читаемый носитель" и "компьютерно-читаемый носитель" включают в себя любой материальный носитель, который приспособлен хранить, кодировать или нести набор инструкций для исполнения процессором, или который инструктирует системе выполнять любой один или более из способов или операций, раскрытых в данном документе. Когда используется в данном документе, термин "компьютерно-читаемый носитель" явно определяется как включающий в себя любой тип компьютерно-читаемого запоминающего устройства и/или диска для хранения и исключающий распространяющиеся сигналы.
[0033] Головное устройство 304 информационно-развлекательной системы обеспечивает интерфейс между транспортным средством 100 и пользователем. Головное устройство 304 информационно-развлекательной системы включает в себя цифровые и/или аналоговые интерфейсы (например, устройства ввода и устройства вывода), чтобы принимать входные данные от и отображать информацию для пользователя(ей). Устройства ввода включают в себя, например, головку регулятора, приборную панель, цифровую камеру для захвата изображения и/или распознавания визуальной команды, сенсорный экран, устройство ввода звука (например, микрофон в салоне), кнопки или сенсорную панель. Устройства вывода могут включать в себя устройства вывода комбинации приборов (например, круговые шкалы, осветительные устройства), актуаторы, индикацию на лобовом стекле, дисплей центральной консоли (например, жидкокристаллический дисплей (LCD), дисплей на органических светоизлучающих диодах (OLED), плоскопанельный дисплей, твердотельный дисплей и т.д.) и/или громкоговорители. В иллюстрированном примере головное устройство 304 информационно-развлекательной системы включает в себя аппаратные средства (например, процессор или контроллер, память, устройство хранения и т.д.) и программное обеспечение (например, операционную систему и т.д.) для информационно-развлекательной системы (такой как SYNC® и MyFort Touch® от Ford®, Entune® от Toyota®, IntelliLink® от GMC® и т.д.). Дополнительно, головное устройство 304 информационно-развлекательной системы отображает информационно-развлекательную систему, например, на дисплее центральной консоли. В иллюстрированном примере головное устройство 304 информационно-развлекательной системы включает в себя громкоговоритель 110, чтобы издавать звуковое предупреждение водителю, и дисплей 112, чтобы выдавать визуальное предупреждение водителю.
[0034] Датчики 306 размещаются в и вокруг транспортного средства 100, чтобы наблюдать за свойствами транспортного средства 100 и/или окружения, в котором транспортное средство 100 находится. Один или более датчиков 306 может быть установлен, чтобы измерять свойства вокруг наружной стороны транспортного средства 100. Дополнительно или альтернативно, один или более датчиков 306 могут быть установлены внутри салона транспортного средства 100 или в кузове транспортного средства 100 (например, отсеке двигателя, колесных нишах и т.д.), чтобы измерять свойства внутри транспортного средства 100. Например, датчики 306 включают в себя акселерометры, одометры, тахометры, датчики угла поворота относительно поперечной и вертикальной оси, датчики скорости колес, микрофоны, датчики давления в шинах, биометрические датчики и/или датчики любого другого подходящего типа. В иллюстрированном примере датчики 306 включают в себя радиолокационный датчик 316, лидарный датчик 318, ультразвуковой датчик 320 и камеру 322. Например, радиолокационный датчик 316 обнаруживает и определяет местоположение объекта (например, транспортного средства 102) посредством радиоволн, лидарный датчик 318 обнаруживает и определяет местоположение объекта посредством лазеров, ультразвуковой датчик 320 обнаруживает и определяет местоположение объекта посредством ультразвуковых волн, а камера 322 обнаруживает и определяет местоположение объекта посредством записи изображений и/или видео объекта.
[0035] ECU 308 наблюдают и управляют подсистемами транспортного средства 100. Например, ECU 308 являются дискретными наборами электроники, которая включает в себя свою собственную схему(ы) (такие как интегральные схемы, микропроцессоры, память, устройство хранения и т.д.) и программно-аппаратные средства, датчики, актуаторы и/или монтажную арматуру. ECU 308 передают и обмениваются информацией через информационную шину транспортного средства (например, информационную шину 310 транспортного средства). Дополнительно, ECU 308 могут сообщать свойства (такие как состояние множества ECU 308, показания датчиков, состояние управления, ошибки и диагностические коды и т.д.) и/или принимать запросы друг от друга. Например, транспортное средство 100 может иметь семьдесят или более ECU 308, которые располагаются в различных местоположениях вокруг транспортного средства 100 и соединяются с возможностью обмена данными посредством информационной шины 310 транспортного средства. В иллюстрированном примере ECU 308 включают в себя модуль 324 управления тормозом, блок 326 управления скоростью и вспомогательную систему 328 безопасности. Например, модуль 324 управления тормозом управляет тормозами транспортного средства 100 на основе входного сигнала, принятого от датчиков 306, а блок 326 управления скоростью управляет скоростью и/или ускорением (например, выполняет автоматический крейсерский режим) транспортного средства 100. Вспомогательная система 328 безопасности (также известная как пассивная система безопасности или система воздушных подушек безопасности) управляет разворачиванием воздушных подушек транспортного средства 100 на транспортном средстве 100.
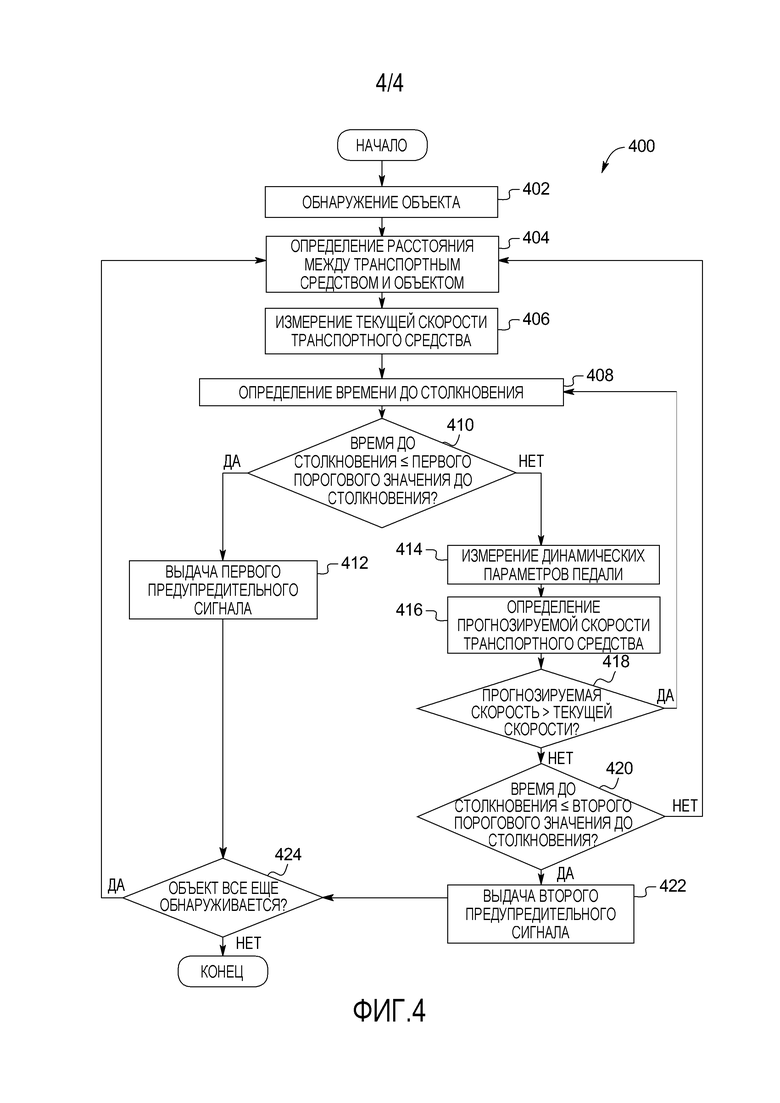
[0036] Фиг. 4 - это блок-схема последовательности операций примерного способа 400 для того, чтобы предупреждать водителя транспортного средства о потенциальном столкновении с близким объектом. Блок-схема последовательности операций на фиг. 4 представляет машиночитаемые инструкции, которые хранятся в памяти (такой как память 314 на фиг. 3), и включает в себя одну или более программ, которые, когда исполняются процессором (таким как процессор 312 на фиг. 3), инструктируют транспортному средству 100 реализовывать примерное средство 114 оповещения о столкновении на фиг. 1 и 3. В то время как примерная программа описывается со ссылкой на блок-схему последовательности операций, иллюстрированную на фиг. 4, множество других способов реализации примерного средства 114 оповещения о столкновении могут альтернативно быть использованы. Например, порядок исполнения блоков может быть переконфигурирован, изменен, устранен и/или объединен, чтобы выполнять способ 400. Дополнительно, поскольку способ 400 раскрывается в связи с компонентами на фиг. 1 и 3, некоторые функции этих компонентов не будут описаны подробно ниже.
[0037] Первоначально, на этапе 402, датчик 104 (например, радиолокационный датчик 316, лидарный датчик 318, ультразвуковой датчик 320, камера 322) транспортного средства 100 обнаруживает объект (например, транспортное средство 102). На этапе 404 средство 114 оповещения о столкновении определяет расстояние 116 между транспортным средством 100 и объектом. Например, средство 114 оповещения о столкновении определяет расстояние 116 на основе данных, собранных посредством датчика 104. На этапе 406 датчик 106 скорости измеряет текущую скорость транспортного средства 100. Дополнительно, на этапе 408, средство 114 оповещения о столкновении определяет время до столкновения для потенциального столкновения между транспортным средством 100 и объектом на основе расстояния 116 и текущей скорости транспортного средства 100.
[0038] На этапе 410 средство 114 оповещения о столкновении сравнивает время до столкновения и первое пороговое значение до столкновения. Если время до столкновения меньше или равно первому пороговому значению до столкновения, способ 400 переходит к этапу 412, в котором средство 114 оповещения о столкновении издает первый предупредительный сигнал. Если время до столкновения больше первого порогового значения до столкновения, способ 400 переходит к этапу 414, в котором датчик 108 педали измеряет динамические параметры педали для педали газа и/или педали тормоза транспортного средства 100. Дополнительно, на этапе 416, средство 114 оповещения о столкновении определяет прогнозируемую скорость транспортного средства 100 на основе текущей скорости и динамических параметров педали.
[0039] На этапе 418 средство 114 оповещения о столкновении сравнивает прогнозируемую скорость и текущую скорость транспортного средства 100. Если прогнозируемая скорость больше текущей скорости, способ 400 возвращается к этапу 408 и корректирует время до столкновения на основе прогнозируемой скорости. Иначе, если прогнозируемая скорость меньше или равна текущей скорости, способ 400 переходит к этапу 420, в котором средство 114 оповещения о столкновении сравнивает время до столкновения со вторым пороговым значением до столкновения. Если время до столкновения больше второго порогового значения до столкновения, способ 400 возвращается к этапу 404, чтобы определять расстояние 116 между транспортным средством 100 и объектом. Иначе, если время до столкновения меньше или равно второму пороговому значению до столкновения, способ 400 переходит к этапу 422, в котором средство 114 оповещения о столкновении издает второй предупредительный сигнал.
[0040] После издания второго предупредительного сигнала на этапе 422 или издания первого предупредительного сигнала на этапе 412 средство 114 оповещения о столкновении определяет, обнаруживает ли все еще датчик 104 объект. Если объект все еще обнаруживается, способ повторяет блоки 404, 406, 408, 410, 412, 414, 416, 418, 420, чтобы определять, должно ли средство 114 оповещения о столкновении продолжать издавать текущий предупредительный сигнал, издавать другой предупредительный сигнал и/или не издавать предупредительный сигнал. Иначе, если датчик 104 больше не обнаруживает объект, способ 400 заканчивается.
[0041] В этой заявке использование дизъюнктивного суждения предназначено, чтобы включать в себя конъюнктив. Использование определенных или неопределенных артиклей не предназначено, чтобы указывать количество элементов. В частности, ссылка на объект в единственном числе предназначена, чтобы обозначать также один из возможного множества таких объектов. Дополнительно, союз "или" может быть использован, чтобы передавать признаки, которые присутствуют одновременно, вместо взаимно исключающих альтернатив. Другими словами, союз "или" должен пониматься как включающий в себя "и/или". Термины "включает в себя", "включающий в себя" и "включать в себя" являются включающими и имеют тот же контекст, что и "содержит", "содержащий" и "содержать", соответственно.
[0042] Вышеописанные варианты осуществления, и, в частности, какие-либо "предпочтительные" варианты осуществления, являются возможными примерами реализаций и просто излагаются для ясного понимания принципов изобретения. Множество изменений и модификаций могут вноситься в вышеописанные варианты осуществления без существенного отступления от сущности и принципов технологий, описанных в данном документе. Все модификации предназначены быть включенными в данном документе в рамки этого изобретения и защищены последующей формулой изобретения.

Группа изобретений относится к области предупреждения о столкновении. Транспортное средство, осуществляющее способ предупреждения о столкновении транспортного средства на основе времени до столкновения. Транспортное средство включает датчик обнаружения объектов, датчик скорости и средство оповещения о столкновении. Средство оповещения о столкновении должно определять расстояние до объекта и определять время до столкновения на основе расстояния и текущей скорости. Средство оповещения о столкновении должно издавать, в ответ на время до столкновения, меньшее или равное первому пороговому значению до столкновения, первый предупредительный сигнал, ассоциированный с первым пороговым значением до столкновения. В ответ на время до столкновения большее, чем первое пороговое значение, определять прогнозируемую скорость и сравнивать прогнозируемую скорость и текущую скорость, издавать ли второй предупредительный сигнал. Обеспечивается содействие водителю для предотвращения столкновения с объектом, расположенным позади транспортного средства. 3 н. и 15 з.п. ф-лы, 4 ил.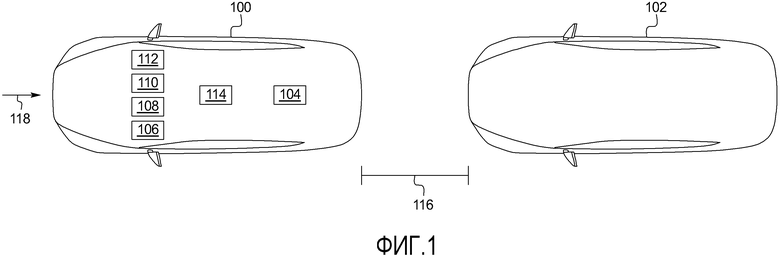
1. Транспортное средство, содержащее:
датчик, чтобы обнаруживать объект;
датчик скорости, чтобы измерять текущую скорость; и
средство оповещения о столкновении, чтобы:
определять расстояние до объекта;
определять время до столкновения на основе расстояния и текущей скорости;
издавать, в ответ на время до столкновения, меньшее или равное первому пороговому значению до столкновения, первый предупредительный сигнал, ассоциированный с первым пороговым значением до столкновения; и
в ответ на время до столкновения, большее, чем первое пороговое значение до столкновения, определять прогнозируемую скорость и сравнивать прогнозируемую скорость и текущую скорость для определения, издавать ли второй предупредительный сигнал.
2. Транспортное средство по п. 1, в котором первый предупредительный сигнал включает в себя непрерывный звуковой сигнал.
3. Транспортное средство по п. 1, в котором средство оповещения о столкновении дополнительно издает первый предупредительный сигнал в ответ на определение средством оповещения о столкновении, что расстояние до объекта меньше или равно пороговому расстоянию.
4. Транспортное средство по п. 1, в котором средство оповещения о столкновении издает первый предупредительный сигнал, чтобы способствовать замедлению для уменьшения удара столкновения с объектом.
5. Транспортное средство по п. 1, в котором датчик является ультразвуковым датчиком.
6. Транспортное средство по п. 1, дополнительно включающее в себя датчик педали, чтобы измерять динамические параметры педали для педали.
7. Транспортное средство по п. 1, в котором средство оповещения о столкновении определяет прогнозируемую скорость на основе текущей скорости и динамических параметров педали.
8. Транспортное средство по п. 1, в котором, в ответ на прогнозируемую скорость, меньшую или равную текущей скорости, средство оповещения о столкновении сравнивает время до столкновения со вторым пороговым значением до столкновения, которое больше первого порогового значения до столкновения.
9. Транспортное средство по п. 8, в котором, в ответ на время до столкновения, меньшее или равное второму пороговому значению до столкновения, средство оповещения о столкновении выполнено с возможностью издавать упомянутый второй предупредительный сигнал, ассоциированный со вторым пороговым значением до столкновения.
10. Транспортное средство по п. 9, в котором упомянутый второй предупредительный сигнал включает в себя прерывистый звуковой сигнал.
11. Способ выдачи предупреждения о столкновении транспортного средства, причем упомянутый способ содержит этапы, на которых:
обнаруживают объект посредством датчика транспортного средства;
определяют расстояние до объекта;
измеряют текущую скорость транспортного средства посредством датчика скорости;
определяют, посредством процессора, время до столкновения на основе расстояния и текущей скорости;
издают первый предупредительный сигнал в ответ на время до столкновения, меньшее или равное первому пороговому значению до столкновения;
определяют, в ответ на время до столкновения, большее, чем первое пороговое значение до столкновения, прогнозируемую скорость транспортного средства; и
сравнивают прогнозируемую скорость и текущую скорость для определения, издавать ли второй предупредительный сигнал.
12. Способ по п. 11, в котором выдача первого предупредительного сигнала включает в себя этап, на котором издают непрерывный тональный сигнал через громкоговоритель транспортного средства.
13. Способ по п. 11, дополнительно включающий в себя этап, на котором издают первый предупредительный сигнал в ответ на определение, что расстояние до объекта меньше или равно пороговому расстоянию.
14. Способ по п. 11, в котором определение прогнозируемой скорости включает в себя этап, на котором измеряют динамические параметры педали для педали транспортного средства.
15. Способ по п. 11, дополнительно включающий в себя этап, на котором сравнивают, в ответ на прогнозируемую скорость, меньшую или равную текущей скорости, время до столкновения со вторым пороговым значением до столкновения, которое больше первого порогового значения до столкновения.
16. Способ по п. 15, дополнительно включающий в себя этап, на котором, в ответ на время до столкновения, меньшее или равное второму пороговому значению до столкновения, издают упомянутый второй предупредительный сигнал, ассоциированный со вторым пороговым значением до столкновения.
17. Способ по п. 16, в котором этап, на котором издают упомянутый второй предупредительный сигнал, включает в себя этап, на котором издают прерывистый звуковой сигнал.
18. Транспортное средство, содержащее:
датчик, чтобы обнаруживать объект;
датчик скорости; и
средство оповещения о столкновении, чтобы:
определять расстояние до объекта;
определять время до столкновения на основе расстояния и текущей скорости; и
издавать первый предупредительный сигнал, когда время до столкновения меньше или равно пороговому значению; и
определять и сравнивать прогнозируемую скорость и текущую скорость, когда время до столкновения больше порогового значения для определения, издавать ли второй предупредительный сигнал.
| СИСТЕМА ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЙ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2010 |
|
RU2543123C2 |
| WO 2015010320 A1, 29.01.2015 | |||
| СПОСОБ НАПРАВЛЕННОЙ КОСТНОЙ РЕГЕНЕРАЦИИ ПРИ АТРОФИИ АЛЬВЕОЛЯРНОЙ КОСТИ ЧЕЛЮСТЕЙ С ПРОВЕДЕНИЕМ ДВУХЭТАПНОЙ ДЕКОРТИКАЦИИ И ФОРМИРОВАНИЕМ ПЬЕЗОХИРУРГИЧЕСКОЙ СЕТКИ НА РЕЦИПИЕНТНОЙ ОБЛАСТИ | 2023 |
|
RU2816539C1 |
| Мобильный комплекс унифицированных средств ремонта воздушных судов | 2019 |
|
RU2750117C1 |
| WO 2010001195 A, 07.01.2010. | |||

