Изобретение относится к способу выбора режима работы гибридного транспортного средства, в частности, к способу, в котором из заданного количества возможных режимов работы гибридной трансмиссии выбирается режим работы, оптимальный для текущего рабочего момента времени по отношению к заданным целевым критериям, с соответствующим оптимальным распределением мощности в трансмиссии.
Постоянно возрастающие затраты на топливо, а также более строгие установленные законом нормы касательно выхлопов транспортных средств предъявляют все более высокие требования к эффективности транспортных средств. Большой потенциал для сокращения потребления топлива представляет собой гибридизация трансмиссии. При этом трансмиссия дополняется по меньшей мере одной электрической машиной и соотнесенной с ней электрической аккумуляторной системой.
В зависимости от варианта выполнения гибридизации, могут, наряду с чисто режимом двигателя внутреннего сгорания, предоставляться различные другие режимы работы, такие как движение на электрической тяге, бустерный режим, рекуперация торможения и т.д. Различные режимы работы гибридной трансмиссии должны использоваться при эксплуатации транспортного средства рациональными образом, чтобы достичь по возможности значительного сокращения потребления топлива. При этом должным также учитываться и другие цели, так как повышение эффективности потребления постоянно происходит в области противостояния конфликтных интересов между минимизацией выхлопов, защитой компонентов и/или комфортом езды. Поэтому для реализации оптимальной стратегии эксплуатации гибридного транспортного средства требуется, из заданного количества возможных режимов работы гибридной трансмиссии выбирать режим работы, оптимальный для текущего рабочего момента времени по отношению к заданным целевым критериям, с соответствующим оптимальным распределением мощности в трансмиссии.
Для выбора соответственно оптимального режима работы в рамках стратегии эксплуатации из уровня техники известны различные методологии и способы. Например, в этом отношении можно сослаться на следующие публикации из уровня техники:
[1]: A. Wilde, Eine modulare Funktionsarchitektur für adaptives und vorausschauendes Energiemanagement in Hybridfahrzeugen, Dissertation, TU München, 2009;
[2]: J. von Grundherr, Ableitung einer heuristischen Betriebsstrategie für ein Hybridfahrzeug aus einer Online-Optimierung, Dissertation, TU München, 2010; и
[3]: Onori et al., Adaptive Equivalent Consumption Minimization Strategy for Hybrid Electric Vehicles, Proceedings of the ASME 2010, Dynamic Systems and Control Conference DSCC2010 September 12-15, 2010, Cambridge (MA), USA.
Согласно публикации [1], с. 19 и далее, различные технологии и способы для установления стратегии эксплуатации для гибридной трансмиссии могут классифицироваться следующим образом:
Согласно так называемым офлайн или статическим стратегиям эксплуатации транспортного средства, уже заранее и офлайн определяются все случаи использования на основе постоянных указаний, согласно которым устанавливается энергетический баланс в транспортном средстве. Подобные указания или правила могут, например, реализовываться с помощью автоматов состояния или регуляторов непрерывного действия.
Кроме того, известны методы оптимального управления, которые включают горизонт прогнозирования в задачу оптимизации (обозначается также предиктивным регулированием на основе модели (MPR)). Подобные подходы определяют, на основе их входной информации, в определенном окне предварительного просмотра (горизонте прогнозирования) в заданном пространстве поиска для рассматриваемой модели оптимальную траекторию параметра состояния системы, например, состояние заряда аккумулятора энергии.
Кроме того, известны основанные на KI-методах (методы на основе искусственного интеллекта) стратегии эксплуатации для регулирования энергетических систем в гибридном транспортном средстве. При этом пытаются представить нечеткое знание с помощью математического метода, например, нейронных сетей, размытой логики, экономических моделей или подходов теории игр таким образом, что вычислительные системы могут обрабатывать нечеткое знание.
Наконец, известны методы, основанные на так называемых онлайн-оптимизациях, которые интерпретируют транспортное средство как многомерную задачу оптимизации, которая описывается целевой функцией, которая включает в себя не только физические параметры, такие как потребление, но и также другие требования, такие как эмиссия шума или защита на весь срок службы компонентов и т.д. Так, например, в публикации [2] предлагается функция полных затрат, посредством которой, наряду с целевым критерием “эффективность топлива”, учитываются другие целевые критерии, как, например, подвижность (комфорт езды). При этом функции частичных затрат, соответствующие отдельным целевым критериям, комбинируются в функцию полных затрат посредством суммирования, и затем из функции полных затрат вычисляется решение касательно стратегии эксплуатации.
Недостатком известных подходов является, однако, то, что подходы оптимизации, основанные на подобной комбинированной функции полных затрат, требуют больших вычислительных затрат и в отношении пределов вычислительной емкости современных управляющих устройств зачастую не подходят для режима реального времени. Кроме того, эти подходы имеют недостаток, состоящий в том, что способ оптимизации, как правило, не может адаптироваться с небольшими затратами на адаптацию к другим или измененным целевым критериям, так как между отдельными целевыми критериями существуют взаимодействия, и добавление дополнительных функций частичных затрат, как правило, обуславливает сложные изменения в аналитической формуле функции полных затрат.
Таким образом, задачей изобретения является предоставить улучшенный способ выбора режима работы гибридного транспортного средства, с помощью которого могут быть преодолены недостатки обычных способов. Задачей изобретения является, в частности, предложить способ выбора режима работы гибридного транспортного средства, при котором из заданного количества возможных режимов работы гибридной трансмиссии может выбираться режим работы, оптимальный для текущего момента времени работы по отношению к заданным целевым критериям, и с помощью которого может минимизироваться риск ошибочных решений и одновременно экономиться время вычислений. Кроме того, должен быть предоставлен способ, который просто и интуитивно расширяется на дополнительные целевые критерии.
Эти задачи решаются способом с признаками независимого пункта формулы изобретения. Предпочтительные формы выполнения и применения изобретения являются предметом зависимых пунктов и поясняются в последующем описании с частичными ссылками на чертежи.
Согласно общим аспектам изобретения, предложен способ выбора режима работы гибридного транспортного средства, при котором в многоступенчатом процессе из заданного количества возможных режимов работы транспортного средства или трансмиссии выбирается оптимальный по отношению к заданным критериям оптимизации режим работы вместе с оптимальным распределением мощности в трансмиссии. Критерии оптимизации далее обозначаются как целевые критерии. При этом решение определения оптимального распределения мощности в трансмиссии развязано от решения или выбора оптимального режима работы, т.е., сначала для каждого возможного режима работы определяется оптимальное распределение мощности, и затем на основе этого результата вычисления выбирается режим работы, оптимальный по отношению к целевым критериям.
Согласно этим общим аспектам изобретения, таким образом, предоставляется способ выбора режима работы гибридного транспортного средства, при котором из заданного количества возможных режимов работы гибридной трансмиссии выбирается режим работы, оптимальный для текущего рабочего момента времени по отношению к заданным целевым критериям, с соответствующим оптимальным распределением мощности в трансмиссии. Для каждого из заданных целевых критериев заранее устанавливается или определяется по меньшей мере одна переменная оценки для количественного описания соответствующего целевого критерия. Под понятием “заранее” понимается установление переменных оценки, которое происходит “офлайн”, т.е. не в режиме движения транспортного средства, а уже перед или при программно-техническом создании средства управления транспортным средством, которое выполнено с возможностью осуществления онлайн-способа.
Для онлайн-вычисления оптимального выбора режима работы, способ дополнительно включает в себя следующие этапы:
Для каждого режима работы первого выбора возможных режимов работы определяются возможные распределения мощности в трансмиссии, а также значения переменных оценки, количественно описывающих целевые критерии, причем вычисляются значения переменных оценки для каждого из определенных распределений мощности соответствующего режима работы, по меньшей мере если его значения являются зависимыми от распределения мощности. Таким образом, с каждой рабочей точкой возможного распределения мощности режима работы сопоставлено, соответственно, значение каждой из переменных оценки. Целевой критерий максимизации энергетической эффективности может, например, количественно описываться переменной оценки, которая указывает кпд электрической тяговой машины. Кпд определяется тогда в каждом режиме работы для каждого из определенных распределений мощности.
Затем для каждого режима работы первого выбора режимов работы определяется оптимальное распределение мощности в трансмиссии посредством определенных значений переменных оценки.
Затем осуществляется выбор оптимального режима работы посредством тех значений переменных оценки, которые демонстрируют его для режимов работы первого выбора соответственно в рабочей точке определенного оптимального распределения мощности. В качестве заданного распределения мощности для выбранного оптимального режима работы предпочтительно устанавливается соответствующее определенное перед этим оптимальное распределение мощности для этого режима работы.
Иными словами, таким образом, для каждого режима работы независимо от других определяется, каким было бы текущее оптимальное распределение мощности в трансмиссии. Преимущество этого заключается в том, что за счет этого можно избежать перекрестных влияний других режимов работы при определении оптимального для режима работы распределения мощности. Только на следующем этапе затем отдельные режимы работы сравниваются между собой посредством переменных оценки, причем для этого применяются только те значения переменных оценки, которые демонстрируют их в рабочих точках определенных перед этим оптимальных распределений мощности.
Под понятием “режим работы гибридной трансмиссии” в этом документе понимается комбинация из конкретной конфигурации трансмиссии и формы потоков энергии в участвующих компонентах. Возможные режимы работы трансмиссии могут включать в себя по меньшей мере два из следующих известных как таковые режимов работы: движение чисто за счет двигателя внутреннего сгорания; чисто электрическое движение при выключенном двигателе внутреннего сгорания; электрическое движение с двигателем внутреннего сгорания в режиме холостого хода; бустерный режим, при котором суммарная мощность привода лежит выше мощности, которая в текущий момент может предоставляться только посредством двигателя внутреннего сгорания, и причем дополнительная мощность предоставляется посредством электрической тяговой машины, путем ввода от электрического аккумулятора тяговой энергии; режим планирования, т.е. режим накатки, при котором двигатель внутреннего сгорания и/или работающая в генераторном режиме электрическая машина приводятся не кинетической энергией транспортного средства; рекуперация при торможении; электрический разгон; повышение в точке приложения нагрузки; снижение в точке приложения нагрузки и так называемый режим установки генератора (GenSet), при котором отдаваемая от двигателя внутреннего сгорания мощность преобразуется электрической машиной в электрическую мощность, для снабжения вспомогательных агрегатов и/или зарядки электрического аккумулятора энергии, при этом не устанавливается момент на ведущих колесах.
Распределение мощности указывает на распределение полной мощности трансмиссии на отдельные компоненты приводного агрегата в гибридной трансмиссии в отношении запрошенной в текущий момент водителем мощности (например, в форме положительного или отрицательного желательного водителю момента). Согласно выделенной форме выполнения изобретения, гибридное транспортное средство является параллельно-гибридным транспортным средством с двигателем внутреннего сгорания и электрической тяговой машиной, которые могут приводиться в действие независимо друг от друга, но которые установлены на общем валу, так что они в связанном случае всегда вращаются с тем же самым числом оборотов, и их моменты суммируются. В этом случае, распределению мощности в трансмиссии соответствует распределение желательного водителю момента на крутящий момент (момент) двигателя внутреннего сгорания и крутящий момент (момент) электрической машины. При заданном желательном водителю моменте, таким образом, возможные распределения мощности в трансмиссии могут задаваться для каждого режима работы посредством моментов в этом режиме работы, создаваемых электрической тяговой машиной, которые ограничены производительностью электрической машины. В соответствии с этим может указываться оптимальное распределение мощности на режим работы для параллельно-гибридного транспортного средства посредством оптимального с точки зрения заданных целевых критериев момента электрической тяговой машины. Однако следует подчеркнуть, что способ не ограничен параллельно-гибридными транспортными средствами.
Под оптимальным выбором режима работы понимается выбор того режима работы, который по отношению к нескольким заданным целевым критериям обеспечивает наилучший возможный компромисс.
Наряду с вышеупомянутой максимизацией энергетической эффективности в качестве целевого критерия для выбора оптимального режима работы, могут задаваться дополнительные целевые критерии, как, например, кондиционирование аккумулятора энергии, минимизация потребления топлива и/или максимально возможный комфорт езды. Выше уже было упомянуто, что для каждого из целевых критериев устанавливается по меньшей мере одна переменная оценки, которая может количественно описывать соответствующий целевой критерий. Целевой критерий комфорта езды может, например, количественно описываться переменной оценки, которая указывает изменение текущего момента, в частности, возникновение скачка момента. Чем выше скачки момента, тем ниже комфорт езды для водителя. Для количественного описания минимизации потребления топлива может, например, применяться переменная оценки, которая указывает пропускаемый в цилиндрах двигателя внутреннего сгорания расход топлива.
Согласно предпочтительной форме выполнения изобретения, для определения оптимальных распределений мощности, которые, соответственно, определяются для каждого режима работы первого выбора возможных режимов работы, выполняются следующие этапы, причем этапы выполняются, соответственно, для каждого режима работы первого выбора:
Определение оптимального значения каждой из переменных оценки в соответствующем режиме работы, которое определяется на основе определенных перед этим значений соответствующих переменных оценки в соответствующем режиме работы. Это оптимальное значение далее обозначается как “первое оптимальное значение”, чтобы это оптимальное значение отличать от последующего “второго оптимального значения”, которое определяется в рамках последующего выбора оптимального режима работы.
Согласно другому этапу этой предпочтительной формы выполнения, затем для определения оптимального распределения мощности каждого режима работы для каждой переменной оценки определяется взвешенное первое отклонение значений соответствующих переменных оценки от определенного первого оптимального значения соответствующей переменной оценки. Как упомянуто выше, эти взвешенные первые отклонения для переменных оценки также определяются в каждом режиме работы. Для каждой рабочей точки возможного распределения мощности режима работы, таким образом, вычисляется это взвешенное первое отклонение каждой из переменных оценки. Для вычисления взвешенных первых отклонений предпочтительно задаются соответствующие коэффициенты оценки или весовые коэффициенты, которые оценивают отклонения отдельных переменных оценки от их первого оптимального значения и масштабируют на общую сравнительную базу.
Согласно другому этапу этой предпочтительной формы выполнения, затем осуществляется определение оптимального распределения мощности соответствующего режима работы с применением предопределенного первого правила решения, которое в зависимости от определенных взвешенных первых отклонений переменных оценки определяет оптимальное распределение мощности.
Если целевой критерий переменной оценки, первое оптимальное значение которой определяется, является целью экстремизации, затем устанавливается первое оптимальное значение в качестве экстремального значения определенных значений соответствующей переменной оценки в соответствующем режиме работы.
Если целью экстремизации является цель максимизации, например, максимизация энергетической эффективности электрической тяговой машины или максимизация комфорта езды, определяется максимальное значение значений переменных оценки, которые получаются для возможных распределений мощности режима работы, в качестве соответствующего первого оптимального значения.
Однако если целевым критерием переменной оценки является цель аппроксимации, например, если целевой критерий должен гарантировать, что аккумулятор тяговой энергии выдерживает предопределенные границы состояния зарядки, то первое оптимальное значение может задаваться как заданное значение, независимое от определенных значений переменной оценки в соответствующем режиме работы, например, в форме заданного значения для текущей заданной мощности электрического аккумулятора тяговой энергии, которая вычисляется в зависимости от текущей информации транспортного средства, например, текущего состояния заряда.
Преимущество этой формы выполнения заключается в том, что различные целевые критерии не должны суммироваться в форме отдельных функций частичных затрат в функцию полных затрат. Вместо этого каждый целевой критерий сначала оценивается сам по себе и независимо от других целевых критериев по отношению к различным режимам работы и возможным в них распределениям мощности и затем посредством взвешенных отклонений переводится на общую схему оценки. Этот подход обеспечивает преимущество, состоящее в том, что способ, при необходимости, может без труда распространяться на другие желательные целевые критерии. В этом случае только требуется, для нового целевого критерия определить подходящую дополнительную переменную оценки, которая количественно описывает целевой критерий, и вышеуказанные этапы аналогичным образом выполнять дополнительно для дополнительной переменной оценки. Адаптация сложной математической формулы, как это было бы необходимо в случае функции полных затрат, не требуется.
Согласно другой предпочтительной форме выполнения, для выбора оптимального режима работы из первого выбора возможных режимов работы выполняются следующие этапы:
Для каждой переменной оценки на основе ее определенных значений определяется действительное для всех режимов работы первого выбора второе оптимальное значение переменной оценки. В отличие от первого оптимального значения, которое определяется как “локальное” оптимальное значение для каждой переменной оценки в каждом режиме работы, второе оптимальное значение определяется как действительное для всех режимов работы “глобальное” оптимальное значение, так что для каждой переменной оценки, соответственно, устанавливается второе оптимальное значение, независимо от режима работы.
Согласно этой другой предпочтительной форме выполнения, для выбора оптимального режима работы, кроме того, определяется взвешенное второе отклонение, которое определяется, соответственно, для каждой переменной оценки в каждом режиме работы первого выбора и которое, соответственно, указывает взвешенное отклонение второго оптимального значения соответствующей переменной оценки от значения переменной оценки в рабочей точке определенного оптимального распределения мощности для соответствующего режима работы. Иными словами, для каждого режима работы первого выбора определяется взвешенная эквивалентная разность, которая указывает отклонение значения переменной оценки в оптимальном распределении мощности от второго оптимального значения переменной оценки, не зависимого от режимов работы.
В заключение осуществляется выбор оптимального режима работы с применением предопределенного второго правила решения, которое оценивает режимы работы первого выбора, соответственно, в зависимости от взвешенных вторых отклонений переменных оценки и устанавливает оптимальный режим работы.
Если целью описываемой переменной оценки является цель экстремизации, то второе оптимальное значение предпочтительно устанавливается как экстремальное значение значений соответствующей переменной оценки в рабочей точке определенного перед этим оптимального распределения мощности во всех режимах работы первого выбора. Второе оптимальное значение определенной переменной оценки соответствует, таким образом, при цели максимизации максимальному значению значений этой переменной оценки в различных режимах работы в рабочей точке оптимального распределения мощности. Если целевым критерием является цель минимизации, то соответственно в качестве второго оптимального значения устанавливается минимум этих значений. Однако если описываемый переменной оценки целевой критерий является целью аппроксимации, то второе оптимальное значение задается как независимое от определенных значений соответствующей переменной оценки заданное значение, которое вновь может вычисляться в зависимости от текущей информации транспортного средства.
Выше уже было упомянуто, что для определения взвешенного первого отклонения или определения взвешенного второго отклонения, соответственно, может предоставляться по меньшей мере один весовой коэффициент или коэффициент оценки для каждой переменной оценки, который масштабирует эквивалентную разность значений переменной оценки от первого или второго оптимального значения соответствующей переменной оценки на безразмерную базу или общую для всех переменных оценки базу затрат, т.е. базу с общей единицей измерения.
Посредством весовых коэффициентов, переменные оценки, которые количественно описывают самые различные целевые критерии, как, например, максимизация энергетической эффективности электрической тяговой машины, минимизация потребления топлива, минимизация выхлопов и т.д., переносятся на общую и, тем самым, сопоставимую базу и к тому же оцениваются. Оценка в этом смысле означает, что отклонение, например, x % первой переменной, которая, например, оценивает энергетическую эффективность, от ее оптимального значения может оцениваться более критично, чем 10%-ое отклонение описывающей выхлопы второй переменной оценки от ее оптимального значения. Это различное взвешивание или оценка переменных оценки может осуществляться, таким образом, просто на основе определения весовых коэффициентов.
Выше уже было упомянуто, что определение оптимального распределения мощности каждого режима работы осуществляется с применением первого правила решения, на которое в качестве входных данных подаются определенные взвешенные первые отклонения переменных оценки, из которых выбирается оптимальный элемент согласно правилам решения. Сопоставимым образом для выбора оптимального режима работы применяется второе правило решения, на которое в качестве входных данных подаются взвешенные вторые отклонения переменных оценки.
Подобный выбор оптимального элемента из множества оцененных посредством переменных оценки вариантов с применением правил решения также известен из области теории игр или из области многокритериальных проблем решения. В качестве правил решения могут применяться известные сами по себе в этих областях различные виды правил решения, как, например, минимаксный принцип или так называемый лексикографический порядок и т.д. Следует отметить, что известные правила решения имеют, соответственно, различные сильные и слабые стороны, так что применение определенного правила решения всегда несет с собой определенные преимущества и недостатки.
В рамках изобретения было установлено, что для предложенного соответствующего изобретению способа для выбора оптимального режима работы особенно предпочтительным является, если второе правило решения выполнено таким образом, что взвешенные вторые отклонения переменных оценки, соответственно, одного режима работы суммируются, и устанавливается тот режим работы в качестве оптимального режима работы, у которого суммарное значение просуммированных вторых отклонений является минимальным. Согласно этому варианту, таким образом, на основе суммарных значений в качестве оптимального режима работы выбирается тот режим работы, который имеет наименьшую сумму полного ущерба в форме просуммированных вторых отклонений.
Кроме того, особенно предпочтительно, если первое правило решения, которое применяется для оценки первых отклонений, т.е. отклонений от локальных первых оптимальных значений, является минимаксным правилом решения. При этом, согласно первому правилу решения, в каждой рабочей точке возможных распределений мощности режима работы может определяется, соответственно, из значений взвешенных первых отклонений переменных оценки наибольшее первое отклонение, и в качестве рабочей точки оптимального распределения мощности может устанавливаться та рабочая точка, которая имеет наименьшее из определенных таким образом наибольших отклонений. Согласно этому варианту, для определения оптимального распределения мощности согласно минимаксному принципу минимизируется “наихудший случай”, что, согласно исследованиям авторов изобретения, при определении оптимального распределения мощности обеспечивает лучший компромисс целевых критериев, чем простое суммирование.
Другая особенно предпочтительная форма выполнения изобретения предусматривает, что первый выбор режимов работы, на основе которого выполняется вышеупомянутое определение оптимального распределения мощности на режим работы и последующее определение оптимального режима работы, очищается от принципиально возможных режимов работы гибридного транспортного средства, которые, однако, в текущем состоянии движения транспортного средства не возможны и/или исключены на основе других правил ограничения. Это ограничение режима работы обеспечивает возможность значительного сокращения вычислительных затрат при последующем определении оптимального распределения мощности и оптимального режима работы.
Согласно этому варианту, определение первого выбора режимов работы, таким образом, имеет следующие этапы: задание возможных состояний движения транспортного средства для гибридного транспортного средства, задание возможных режимов работы трансмиссии и задание сопоставления, которое указывает, какие возможные режимы работы допустимы в каком состоянии движения транспортного средства; определение текущего состояния движения транспортного средства; и ограничение режимов работы транспортного средства теми, которые сопоставлены с определенным текущим состоянием движения транспортного средства.
Заданные возможные состояния движения транспортного средства могут включать в себя, например, остановку транспортного средства, режим торможения и режим езды (без торможения), далее также упоминается как “вождение”. Так, например, с состоянием движения транспортного средства “вождение” могут сопоставляться такие режимы работы, как движение за счет двигателя внутреннего сгорания, электрическое движение, повышение в точке приложения нагрузки и снижение в точке приложения нагрузки. С состоянием движения транспортного средства “торможение” могут быть ассоциированы такие режимы работы как обычное торможение, рекуперация при торможении и планирование. С состоянием движения транспортного средства “остановка” могут быть ассоциированы такие режимы работы как холостой ход и установка генератора (GenSet).
Это сокращенное в зависимости от состояния движения транспортного средства количество режимов работы может предпочтительным образом дополнительно сокращаться тем, что задается по меньшей мере одно правило ограничения, которое в зависимости от по меньшей мере одного рабочего параметра и предпочтительно независимо от текущего требования момента и текущего состояния движения транспортного средства устанавливает, какие режимы работы в текущий момент предоставлены в распоряжение. Согласно этому по меньшей мере одному правилу ограничения, может тогда осуществляться дополнительное ограничение режимов работы транспортного средства таким режимами, которые в текущий момент предоставлены в распоряжение. Например, согласно по меньшей мере одному правилу ограничения, может проверяться доступность компонентов в трансмиссии, особенно электрического аккумулятора энергии и/или электрической тяговой машины. Например, может быть задано правило ограничения, состоящее в том, что все режимы работы, которые требуют использования электрической машины, в текущий момент недоступны, если электрический аккумулятор энергии превышает предопределенные температурные пределы и/или находится вне предопределенных пределов состояния зарядки. Таким способом можно уже перед началом вычисления оптимального распределения мощности на режим работы исключить те режимы работы, которые в текущем рабочем состоянии транспортного средства не предоставлены в распоряжение.
Согласно другому аспекту изобретения, при определении оптимального распределения мощности в зависимости от режима работы на основе предопределенных критериев исключения могут определяться определенные значения распределений мощности режимов работы, которые должны исключаться как возможные рабочие точки. Критерии исключения предпочтительно определены таким образом, что каждое возможное распределение мощности, которое не исключается, в общем уже представляет приемлемого кандидата выбора. Так оптимальный режим работы и/или оптимальное распределение мощности отыскивается только на основе сравнительно “хорошего” распределения мощности и сокращает риск неправильного решения.
Изобретение также относится к гибридному транспортному средству, в частности, грузовому автомобилю, имеющему устройство управления для выбора режима работы гибридного транспортного средства, которое выполнено так, чтобы выполнять способ, как раскрыто в настоящем документе. Во избежание повторений, признаки, описанные в контексте способа, должны также считаться раскрытыми и заявленными в контексте признаков устройства управления.
Вышеописанные предпочтительные формы выполнения и признаки изобретения могут комбинироваться друг с другом различным образом. Другие особенности и преимущества изобретения описываются ниже со ссылками на приложенные чертежи, на которых показано следующее:
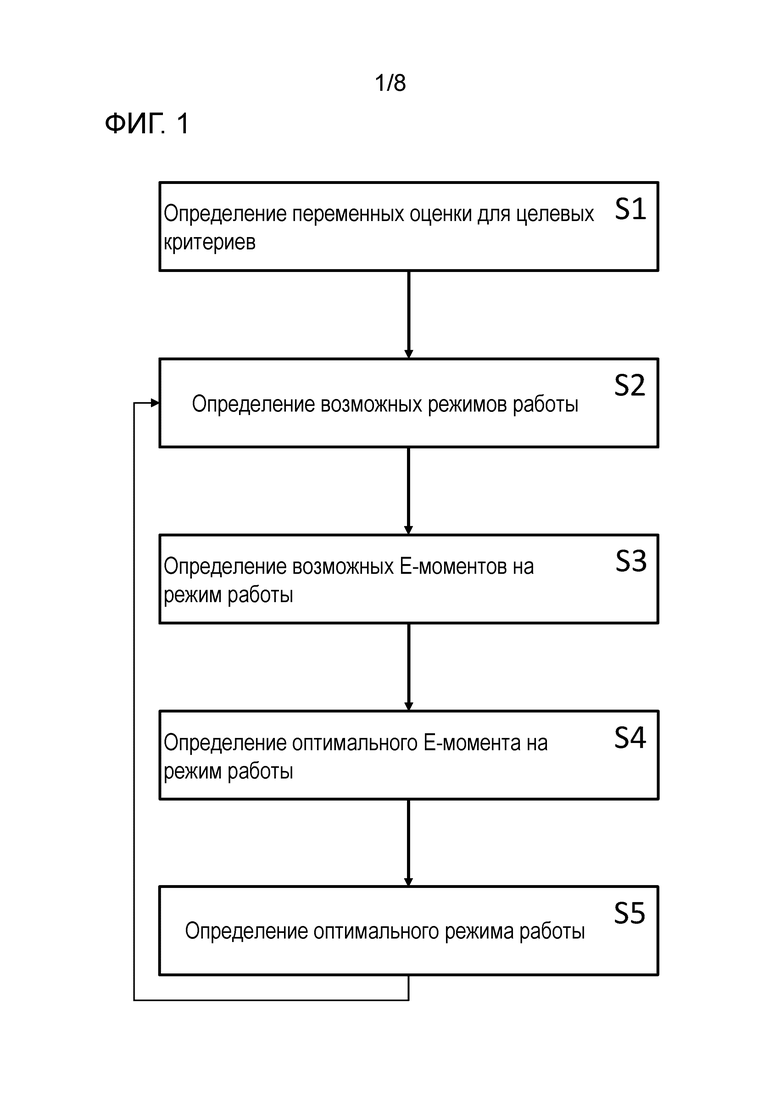
Фиг. 1 – схематичная блок-схема способа выбора режима работы гибридного транспортного средства согласно форме выполнения изобретения;
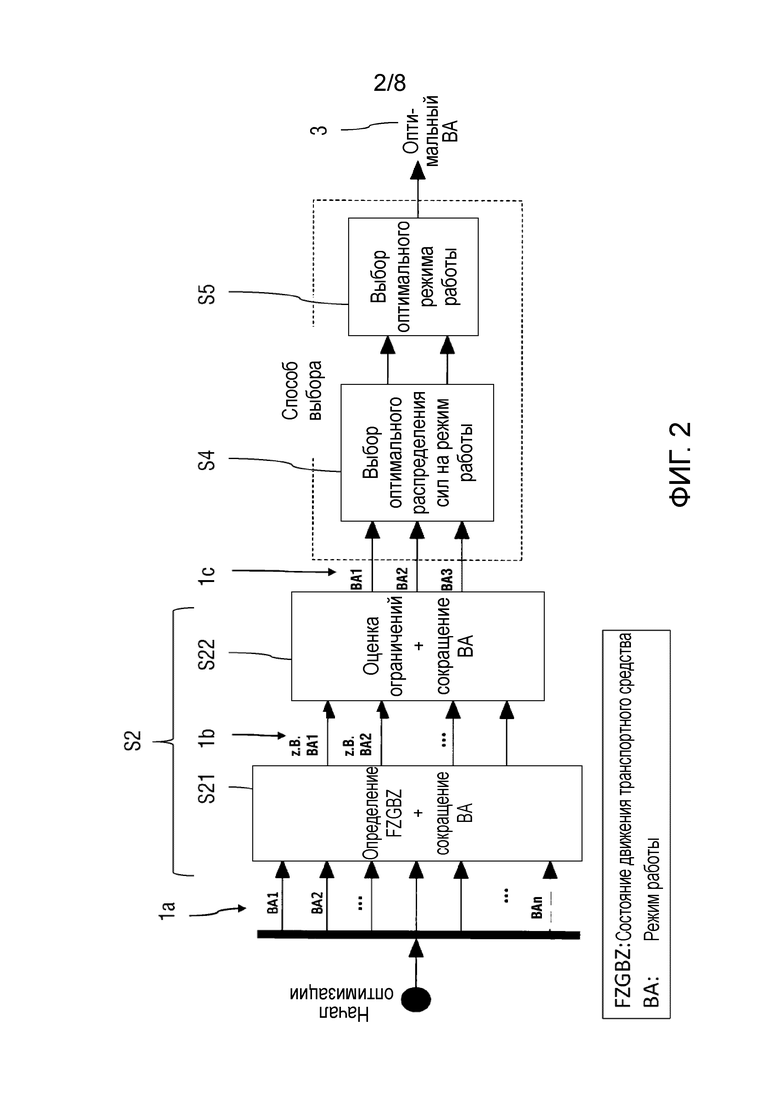
Фиг. 2 - альтернативная схематичная блок-схема для иллюстрации соответствующего изобретению способа согласно одному варианту выполнения изобретения;
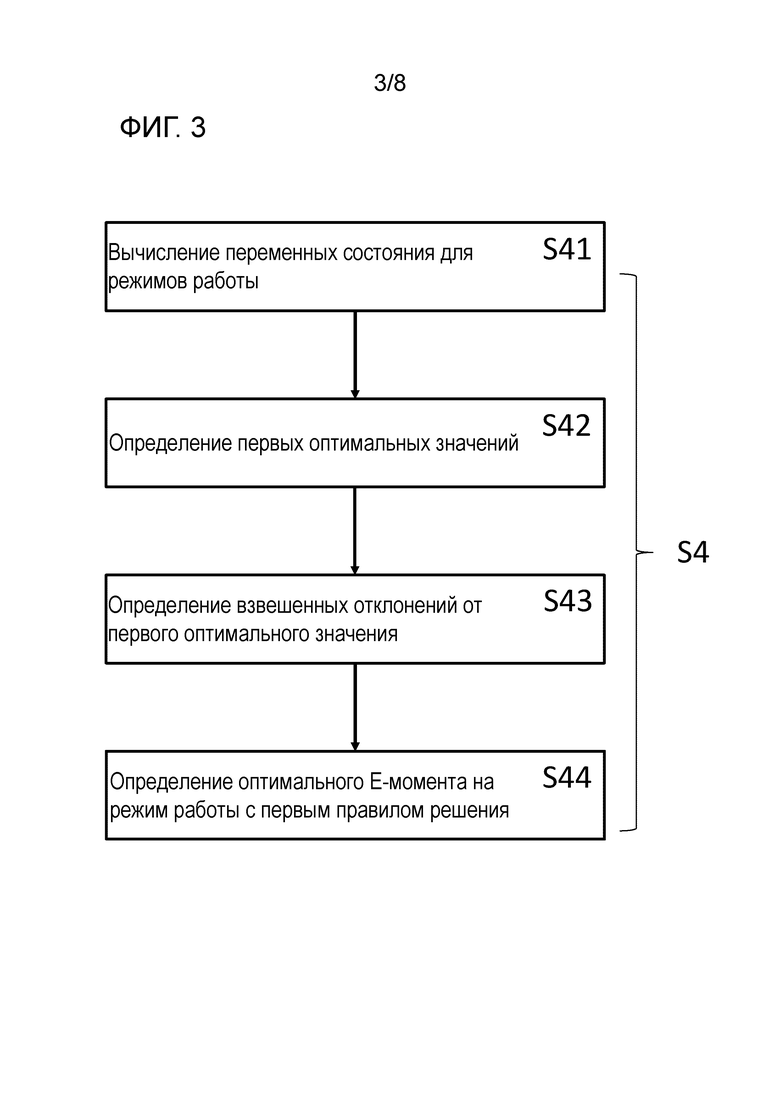
Фиг. 3 –схематичная блок-схема этапов для определения оптимального E-момента для каждого режима работы согласно одному варианту выполнения изобретения;
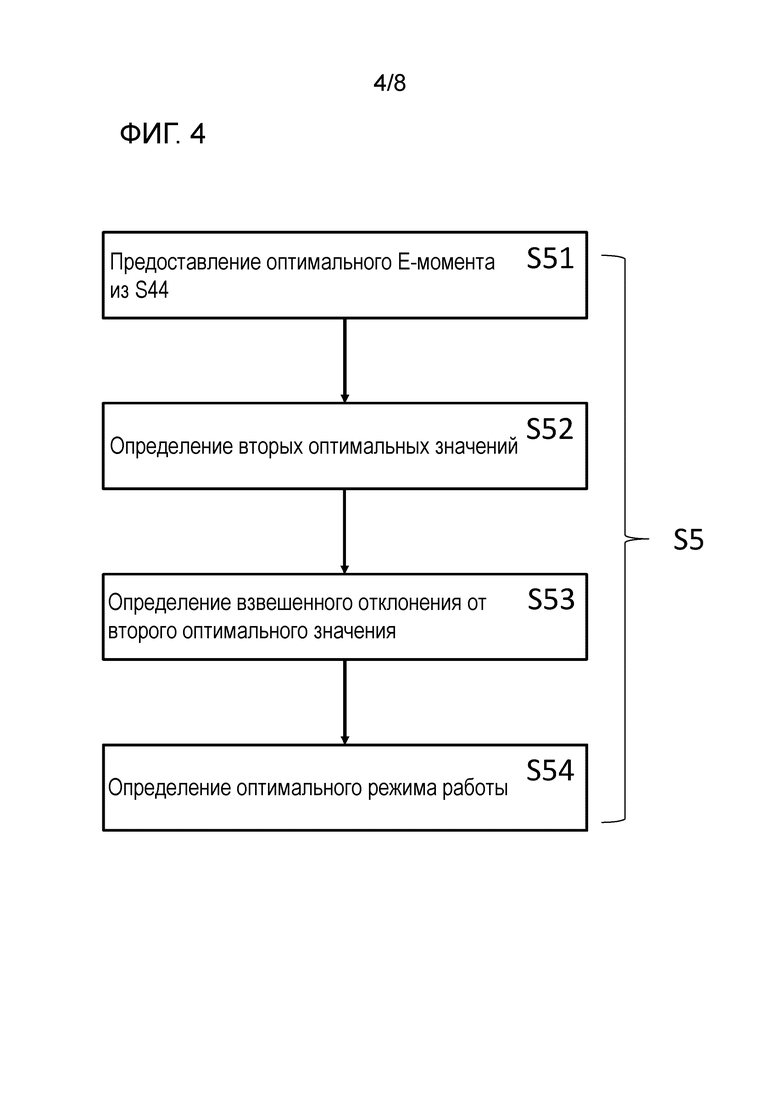
Фиг. 4 - схематичная блок-схема для иллюстрации определения оптимального режима работы на основе определенных оптимальных распределений мощности согласно одному варианту выполнения изобретения;
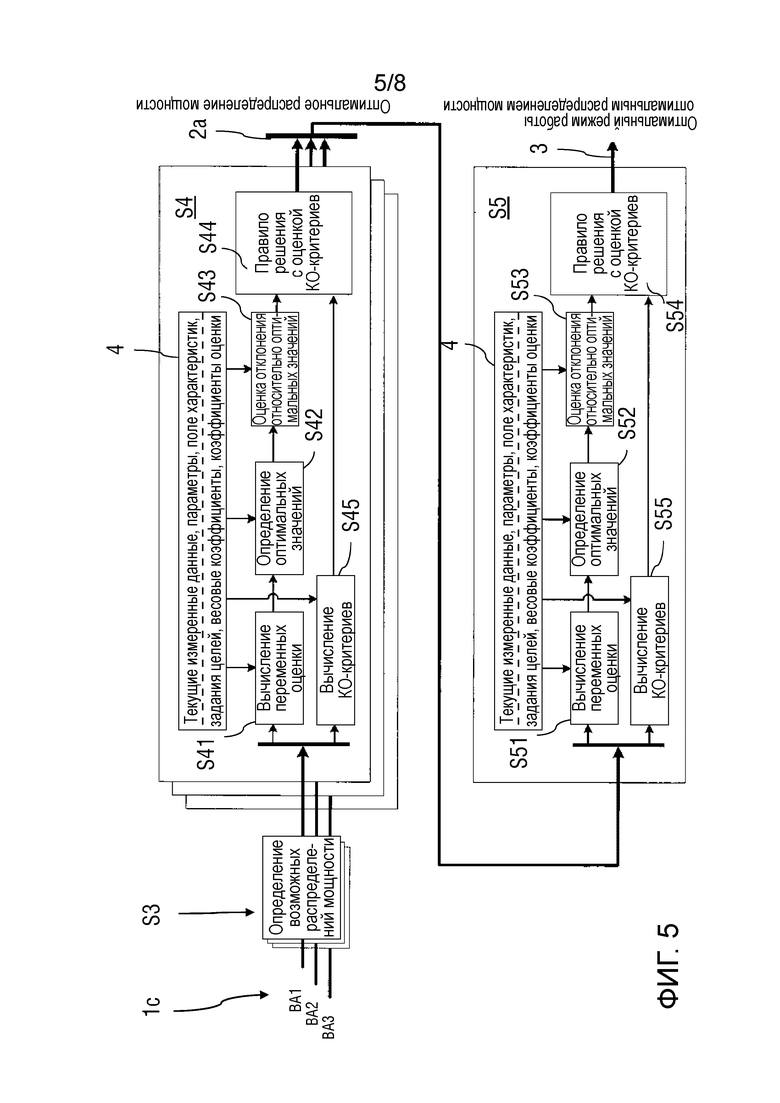
Фиг. 5 – альтернативное представление для иллюстрации определения оптимальных распределений мощности и оптимального режима работы согласно форме выполнения изобретения;
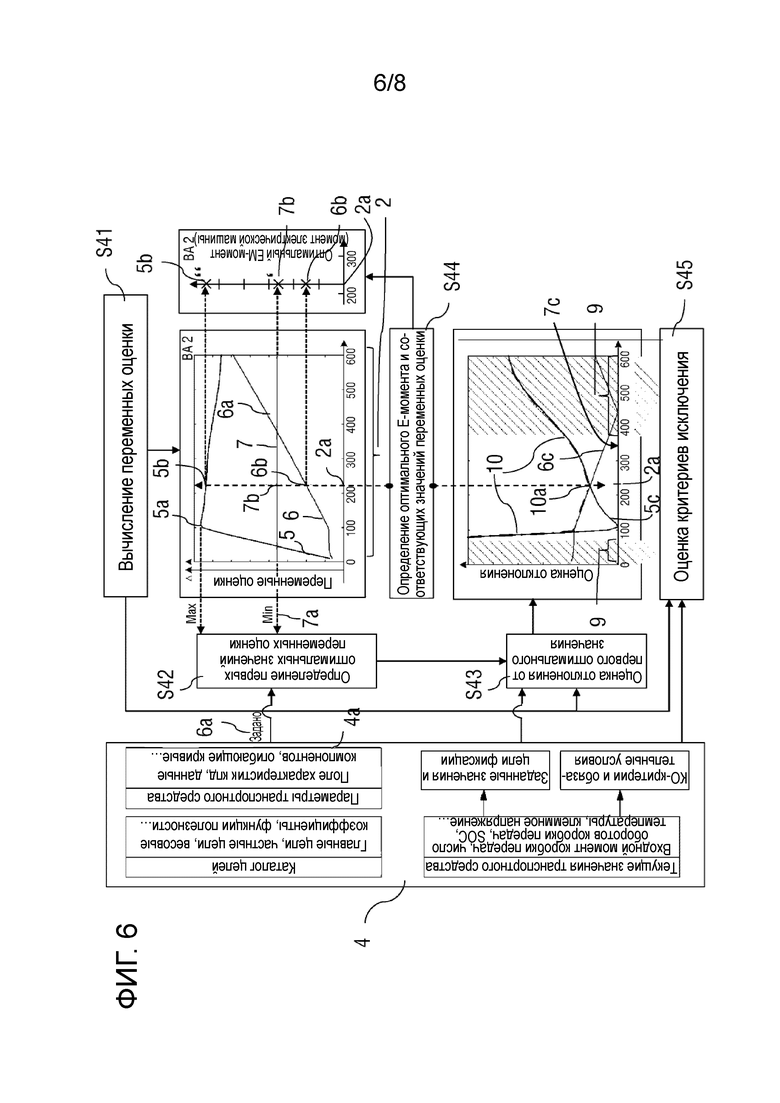
Фиг. 6 – примерная иллюстрация вычисления оптимального распределения мощности для одного режима работы;
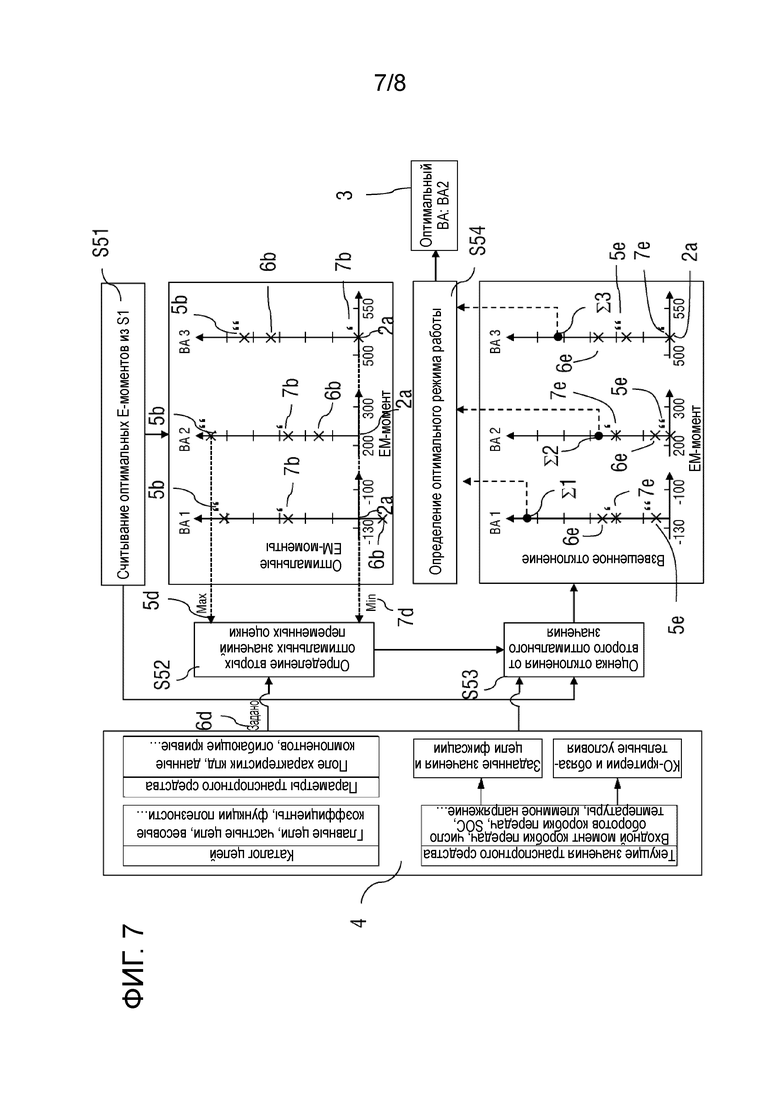
Фиг. 7 – примерная иллюстрация определения оптимального режима работы на основе определенных оптимальных распределений мощности; и
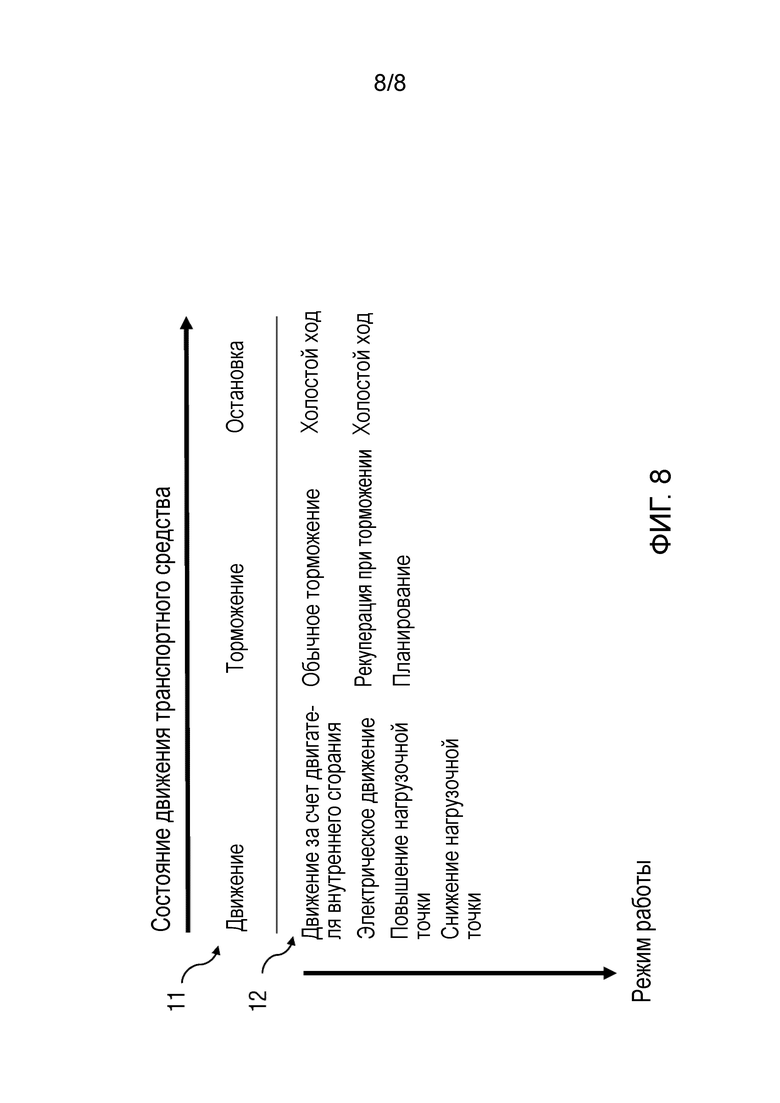
Фиг. 8 - сопоставление, которое указывает, какой из возможных режимов работы допустим в каком состоянии движения транспортного средства.
Фиг. 1 показывает примерную блок-схему для иллюстрации этапов способа для выбора режима работы гибридного транспортного средства согласно предпочтительной форме выполнения. Согласно предложенной форме выполнения, гибридное транспортное средство выполнено как параллельно-гибридное транспортное средство, в особенности как грузовой автомобиль. Известная сама по себе гибридная трансмиссия включает в себя двигатель внутреннего сгорания и электрическую тяговую машину, причем двигатель внутреннего сгорания и электрическая тяговая машина, далее упоминаемая как электрическая машина или E-машина, связаны по числу оборотов посредством общего вала, однако могут управляться независимо друг от друга.
Гибридной трансмиссией могут выполняться различные известные сами по себе режимы работы, например, движение чисто за счет двигателя внутреннего сгорания, чисто электрическое движение, бустерный режим, режим планирования, рекуперация при торможении, электрический разгон, повышение в точке приложения нагрузки, снижение в точке приложения нагрузки, так называемый GenSet-режим (режим генераторной установки) и т.д.
Различные режимы работы должны при эксплуатации транспортного средства использоваться рациональным образом, чтобы достичь по возможности большого сокращения потребление топлива, причем также должны приниматься во внимание другие заданные цели, такие как максимизация энергетической эффективности электрической тяговой машины, минимизация выхлопов и/или комфорт езды. Поэтому для реализации оптимальной стратегии эксплуатации гибридного транспортного средства требуется, из заданного количества возможных режимов работы гибридной трансмиссии выбирать оптимальный для текущего рабочего момента времени относительно заданных целевых критериев режим работы с соответствующим оптимальным распределением мощности в трансмиссии, т.е. в каждый рабочий момент времени выбирать тот режим работы, который по отношению к целевым критериям предоставляет наилучший возможный в текущий момент компромисс.
На этапе S1 сначала офлайн, т.е. перед выполнением собственно онлайн-способа оптимизации, для каждого из целевых критериев устанавливается по меньшей мере одна подходящая переменная оценки, посредством которой может количественно описываться соответствующий целевой критерий. Это поясняется ниже для примера более подробно со ссылками на фиг. 6 и 7.
При работе транспортного средства и в рамках собственно онлайн-способа оптимизации затем непрерывно выполняются этапы S2-S5, т.е. этапы S2-S5 повторно выполняются в интервале, равном нескольким миллисекундам, чтобы таким образом непрерывно в зависимости от текущих значений для транспортного средства выбирать и устанавливать режим работы, оптимальный для текущего состояния транспортного средства.
Согласно этапам S2-S5, в многоступенчатом процессе из множества всех возможных в системе режимов работы выбирается оптимальный по отношению к критериям оптимизации режим работы вместе с оптимальным распределением мощности.
На этапе S2 затем осуществляется сначала сокращение режимов работы до действительного в текущий момент количества, что поясняется на фиг. 2 и 8 более подробно.
В начальный момент времени оптимизации или соответствующего цикла вычисления сначала многоступенчатому способу выбора представляются все реализуемые с помощью гибридной трансмиссии режимы работы BA1-BAn для оценки.
Фиг. 8 перечисляет возможные состояния 11 движения гибридного транспортного средства. Заданными возможными состояниями движения транспортного средства являются, например, остановка транспортного средства, режим торможения и режим езды (без торможения). Как известно, не каждый из режимов работы может быть реализован в каждом из возможных состояний 11 движения транспортного средства. Сопоставление 12, которое указывает, какие возможные режимы 12 работы, соответственно, возможны в определенном состоянии 11 движения транспортного средства, было заранее установлено и, например, сохранено в форме таблицы в транспортном средстве, к которой обращаются на этапе S2.
Из сопоставления 12 можно, например, видеть, что с состоянием движения транспортного средства “вождение” сопоставлены такие режимы работы как вождение при работе двигателя внутреннего сгорания, электрическое вождение, повышение в точке приложения нагрузки и снижение в точке приложения нагрузки. С состоянием движения транспортного средства “торможение” сопоставлены такие режимы работы, как обычное торможение, рекуперация при торможении и планирование. С состоянием движения транспортного средства “остановка” сопоставлены режимы работы холостой ход и установка генератора (GenSet).
Показанные на фиг. 8 режимы работы в зависимости от состояния движения транспортного средства приведены только для примера и могут быть расширены другими возможными режимами работы, в зависимости от выполнения гибридного транспортного средства.
На этапе S21 на фиг. 2 сначала определяется текущее состояние движения транспортного средства и затем осуществляется ограничение режима работы транспортного средства теми режимами, которые соотнесены с определенным текущим состоянием движения транспортного средства согласно сопоставлению 12, показанному на фиг. 8. Если транспортное средство находится в текущий момент в состоянии движения транспортного средства “вождение”, то на последующем этапе S22 подаются только те режимы работы, которые посредством состояния движения транспортного средства “вождение” соотнесены как возможные режимы работы. Сниженное количество режимов 1b работы затем обрабатывается на этапе S22.
На этапе S22 на основе определенных правил оцениваются ограничения для отдельных режимов работы. Ограничения исходят, например, из доступности компонентов. Подобные ограничения могут включать в себя, например, термические ограничения, которые проверяют, не стали ли электрическая машина или аккумулятор тяговой энергии электрической машины слишком горячими, так что те режимы работы, которые требуют электрической машины, в текущий момент времени не предоставляются в распоряжение и, следовательно, в этом случае исключаются из списка возможных режимов работы. Подобные правила ограничения могут также проверять, является ли машина доступной или нет, на основе других причин. Эти ограничения, однако, не являются связанными с данным моментом, а подобные критерии включаются только на последующих этапах (например, S45, S55), например, в рамках критериев исключения. Выбор возможных режимов 1b работы может, таким образом, дополнительно ограничиваться также на этапе S22 на основе заданных правил ограничения, так что, в итоге, первый выбор возможных режимов 1c работы подается на последующий двухступенчатый способ выбора этапов S3-S5. Только для примера должно быть принято, что в текущем состоянии езды и в момент времени вычислений способа возможные режимы работы первого выбора 1c сокращены до трех режимов работы, которые далее обозначаются как BA1, BA2 и BA3.
На этапе S3, который не показан на фиг. 2, сначала для каждого из оставшихся режимов 1с работы после сокращения режимов работы определяются возможные распределения мощности в трансмиссии. В данном примере выполнения параллельно-гибридного транспортного средства возможное распределение мощности задается посредством указания моментов, реализуемых электрической машиной в текущем рабочем состоянии. При вычислении возможных моментов электрической (Е-) машины учитывается производительность Е-машины. Из каждого возможного момента Е-машины получается тогда остающийся, подлежащий предоставлению двигателем внутреннего сгорания момент как разность текущего запрошенного желательного водителю момента за вычетом момента Е-машины, так что распределение мощности однозначно устанавливается. В качестве результата этапа S3 получается, таким образом, для каждого режима работы диапазон возможных значений для моментов Е-машины. Возможные значения для моментов Е-машины вычисляются дискретными шагами, например, шагами в 10 Нм.
На этапе S4 осуществляется затем вычисление оптимального момента Е-машины на каждый режим работы. Подэтапы этапа S4 показаны на фиг. 3, 5 и 6 соответственно в различных представлениях.
На верхней диаграмме на фиг. 6 значения абсциссы в качестве примера показывают определенные на этапе S3 возможные Е-моменты (электрические моменты) одного из режимов работы первого выбора 1c, здесь в качестве примера для режима BA2 работы. Режим BA2 работы представляет в данном случае режим работы снижения в точке приложения нагрузки, в котором мощность, требуемая для реализации положительного желательного водителю момента, предоставляется как от двигателя внутреннего сгорания, так и от Е-машины. Снижение в точке приложения нагрузки применяется для оптимизации рабочей точки двигателя внутреннего сгорания или для целенаправленного разряда аккумулятора энергии. Для этого режима работы в текущем рабочем состоянии определялись возможные Е-моменты 2 в диапазоне 0-600 Нм дискретными шагами по 10 Нм (см. этап S3).
На этапах S41 и S42 затем вычисляются значения переменных оценки для каждого режима работы и затем определяется первое оптимальное значение для каждой переменной оценки в соответствующем режиме работы.
Показанные на диаграмме кривые 5 и 6, а также горизонтальная линия 7 указывают вычисленный на этапе S41 характеристику значений трех переменных оценки в зависимости от определенных возможных моментов 2 Е-машины или распределения мощности.
Согласно данному примеру, кривая 5 указывает характеристику переменной оценки “кпд электрической тяговой машины”. Единица этой переменной оценки является безразмерной. Эта переменная оценки применяется для количественного описания целевого критерия максимизации энергетической эффективности электрической тяговой машины.
Целевой критерий максимизации энергетической эффективности электрической тяговой машины является целью максимизации, т.е. энергетическая эффективность должна быть максимизирована. Следовательно, на этапе S42 в качестве первого оптимального значения 5a переменной оценки “кпд электрической тяговой машины” определяется максимальное значение кривой 5.
В данном случае характеристика 5 этой переменной оценки в зависимости от момента 2a Е-машины имеет максимум 5a при значении момента Е-машины, равном, например, 100 Нм. Это означает, что максимальный кпд достигается при моменте Е-машины, равном 100 Нм, то есть когда Е-машина в реакции на положительный текущий желательный водителю момент предоставляет 100 Нм, а оставшаяся разность по отношению к желательному водителю моменту предоставляется от двигателя внутреннего сгорания. Из характеристики 5 можно видеть, что кпд при большем, чем 100 Нм, Е-моменте снова спадает. Это объясняется, например, тем, что мощность потерь в направлении более высоких крутящих моментов возрастает квадратично. Вычисление характеристики 5 осуществляется посредством сохраненной параметрической поверхности 4а для кпд электрической тяговой машины.
Обозначенная ссылочной позицией 6 линия на верхней диаграмме на фиг. 6 представляет характеристика мощности аккумуляторной батареи и показывает мощность заряда или разряда аккумулятора энергии, в которую входит кпд аккумулятора тяговой энергии. С увеличением Е-момента, который должен быть предоставлен от Е-машины, растет мощность разряда, что представлено возрастанием кривой 6. При этой кривой не отыскивается ни максимум, ни минимум характеристики 6, а соответствующим целевым критерием является цель аппроксимации касательно оптимального состояния заряда аккумулятора энергии, который должен находиться в предопределенном диапазоне. Если аккумулятор тяговой энергии полностью заряжен, то является рациональным разряжать его, чтобы затем снова иметь достаточную емкость аккумулятора для приема энергии рекуперации. Если аккумулятор тяговой энергии сильно разряжен, то является рациональным его вновь заряжать. Следовательно, первое оптимальное значение для характеристики кривой 6 задается в качестве заданного значения 6a в зависимости от текущих данных транспортного средства, в частности, в зависимости от текущего состояния заряда аккумулятора тяговой энергии, который в данном случае достигается посредством значения Е-момента при 440 Нм.
Характеристика кривой 7 является характеристикой другой переменной оценки для оценки другой цели. Эта переменная оценки приведена в качестве примера для переменной оценки, которая не зависит от текущего Е-момента. Характеристика такой переменной оценки показан как горизонтальная прямая для Е-момента и приобретает значение только на последующем этапе сравнения различных режимов работы между собой. Для этой переменной оценки в качестве оптимального значения идентифицирован минимум. Ввиду постоянного характеристики кривой 7, этот минимум 7a не сопоставлен ни с каким определенным крутящим моментом.
Первые оптимальные значения 5a, 6a и 7a определяются не только для режима BA2 работы, но и для всех режимов работы первого выбора.
Представленная характеристика 5, 6, 7 значений переменных оценки заново вычисляется при каждом проходе этапов S2-S5. Для отдельных этапов вычислений здесь предоставляются в распоряжение такие информации, как текущие измеренные данные, параметры транспортного средства и компонентов, а также параметрические поверхности, которые обрабатываются средством управления 4 транспортного средства, которое предназначено для выполнения способа и в котором сохранены целевые параметры, критерии исключения (KO-критерии), весовые коэффициенты, применяемые параметры транспортного средства и т.д., что указано только в качестве примера в схематичном виде посредством блока 4.
Вычисление характеристик 5, 6, 7 переменных оценки осуществляется в зависимости от текущих измеренных данных, параметров транспортного средства и компонентов, а также параметрических поверхностей и, в частности, в зависимости от конкретной конфигурации трансмиссии гибридного транспортного средства.
Определенные таким образом характеристики 5, 6, 7 переменных оценки действительны, соответственно, только для одного цикла вычисления этапов S2-S5 онлайн-вычисления, т.е. в последующем цикле вычисления S2-S5, который выполняется на несколько миллисекунд позже или в другой ситуации езды, могут получаться также другие характеристики и другие оптимальные значения 5a, 6a, 7a, так как параметры транспортного средства и измеренные данные непрерывно изменяются.
На этапе S43 для каждой переменной оценки каждого режима работы определяется взвешенное первое отклонение значений соответствующей переменной оценки от определенного первого оптимального значения соответствующей переменной оценки. Это представлено на нижней диаграмме на фиг. 6. Для определения взвешенного отклонения, для каждой кривой формируются, соответственно, разностные значения из первоначальных кривых 5, 6, 7 с соответствующим оптимальным значением 5a, 6a или 7a и дополнительно масштабируются весовым коэффициентом (коэффициентом оценки).
Так как оптимальное значение 5a соотнесено с Е-моментом несколько выше 100 Нм, характеристика взвешенного первого отклонения 5c имеет нулевое положение при этом значении крутящего момента электрической машины. Соответствующее справедливо для взвешенного первого характеристики 6c мощности аккумуляторной батареи, которая имеет нулевое положение при заданном значении примерно 440 Нм. Взвешенную характеристику 7c на диаграмме трудно различить, так как он лежит непосредственно на оси абсцисс, что получается из постоянной характеристики 7 на верхней диаграмме. Эта переменная оценки выпадает, таким образом, в данном случае из текущей оценки, потому что она не дает оптимального значения.
Посредством масштабирования с весовым коэффициентом, определенные первые отклонения могут, с одной стороны, переноситься на безразмерную единицу или на общую единицу, например, денежную единицу функции ущерба, так как переменные оценки, как правило, указываются в различных единицах. С другой стороны, взвешивание обеспечивает возможность калибровки первых отклонений переменных оценки между собой, чтобы переменные оценки приоритизировать между собой, так как, как правило, целевые критерии, соотнесенные с переменными оценки, должны взвешиваться в различной степени или приоритизироваться.
На фиг. 5, кроме того, представлено, что могут задаваться опциональные критерии исключения (на фиг. 5 также обозначены как “KO-критерии”), которые могут допускать только определенные моменты Е-машины. Так, например, на этапе S45 на основе заданного критерия исключения допускаются только те моменты Е-машины, которые демонстрируют минимальный кпд, например, Е-моменты, при которых текущий кпд электрической тяговой машины соответствует по меньшей мере 80 процентам. С этими критериями исключения, таким образом, определенные Е-моменты 9 возможного распределения мощности на режим работы исключаются, что представлено посредством заштрихованных диапазонов на нижней диаграмме на фиг. 6. В этих диапазонах значения переменной оценки или взвешенного первого отклонения, таким образом, при последующем определении оптимального режима работы не учитываются.
Преимущество применения подобных критериев исключения состоит в том, что они могут быть определены таким образом, что каждый из не исключенных посредством этого Е-моментов тем самым уже представляет приемлемого кандидата для выбора, так что затем отыскивается оптимум распределения мощности только внутри приемлемых распределений мощности или Е-моментов. За счет этого можно снизить риск ложного решения. Кроме того, за счет этого можно скомпенсировать слабые стороны применяемых затем правил решения, так как при этом по меньшей мере гарантируется, что всегда за основу будет браться приемлемый Е-момент выбора оптимального режима работы.
На этапе S44 затем определяется оптимальный момент 2а Е-машины с применением заданного правила решения.
Возможным было бы, например, простое суммирование всех кривых 5c, 6c и 7c и выбор той рабочей точки, т.е. того момента Е-машины, который имеет наименьшее значение просуммированных первых взвешенных отклонений 5c, 6c и 7c всех переменных оценки на режим работы. Это представляет точку наименьшего полного ущерба.
Однако недостатком этого сравнительно простого правила решения является то, что оптимум может находиться ниже оптимума частичной цели. Это имеет недостаток в том случае, когда в отношении одного целевого критерия найдено очень оптимальное решение, а в отношении всех других целевых критериев – скорее сравнительно плохое решение.
Поэтому следует предпочесть решение, которое представляет хороший компромисс между всеми целевыми критериями. Для этого лучше подходит правило решения, основанное на минимаксном принципе. На нижней диаграмме на фиг. 6 было применено такое минимаксное правило решения, которое представлено посредством характеристики штрих-пунктирной кривой 10. Кривая 10 указывает наихудший случай, в котором в каждой рабочей точке возможных моментов, соответственно, из значений взвешенных первых отклонений 5c, 6c, 7c определяется соответствующее наибольшее первое отклонение. В качестве оптимального распределения мощности затем выбирается тот Е-момент 2a, с которым соотнесено наименьшее 10a из определенных наибольших первых отклонений 10. В данном случае это соответствует точке 2a, так как штрих-пунктирная кривая имеет свой минимум 10a в рабочей точке 2a. Следует еще раз отметить то, что на фиг. 6 представлено только определение оптимального электрического момента для одного режима работы, а именно, режима “BA2” работы. В рамках этапа S4, однако, для всех режимов работы первого выбора 1c вычисляются значения переменных оценки с соотнесенными оптимальными значениями и взвешенными отклонениями от первых оптимальных значений, и затем определяется оптимальное распределение мощности соответствующего режима работы.
На правой верхней диаграмме еще раз представлен результат этапа S44 для режима BA2 работы. Из возможных значений моментов Е-машины в режиме BA2 работы определяется точка 2a в качестве оптимального момента Е-машины. С этой рабочей точкой 2a оптимального распределения мощности соотнесены значения 5b, 6b и 7b в качестве соответствующих значений переменных оценки, которые затем подаются на этап S5.
На этапе S5 осуществляется затем определение оптимального режима работы на основе результатов этапа S4. Для этого выполняются этапы S51-S54 или S55, что вновь проиллюстрировано на фиг. 4, 5 и 7 в различных представлениях.
На этапе S51 сначала предоставляются оптимальные Е-моменты для отдельных режимов работы и соответствующие значения переменных 5b, 6b, 7b оценки, которые определялись на этапе S44, в качестве входных данных, что для примера представлено на верхней диаграмме на фиг. 7 для трех режимов BA1, BA2 и BA3 работы.
В середине вновь представлен режим BA2 работы, который уже пояснялся на фиг. 6, с его оптимальным Е-моментом 2a величиной, например, 220 Нм и, соответственно, ассоциированными значениями 5b, 6b, 7b переменных оценки в этой рабочей точке 2a оптимального распределения мощности.
Слева от этого представлен режим “BA1” работы, который представляет режим работы повышения в точке приложения нагрузки. При повышении в точке приложения нагрузки двигатель внутреннего сгорания предоставляет как мощность для полного выполнения положительного желательного водителю момента, так и для одновременного заряда аккумулятора тяговой энергии.
Режим BA3 работы представляет режим работы чисто электрического вождения.
Особым аспектом настоящего примера выполнения является то, что теперь, аналогично этапам для определения оптимального распределения мощности на режим работы, сопоставимые этапы выполняются для определения оптимального режима работы, что хорошо видно на фиг. 5, так как этапы S52-S55 в принципе соответствуют этапам S42-S45. Особенность при выполнении этапов S52-S55 состоит в том, что этапы вычисления теперь выполняются с оптимальными распределениями 2а мощности режимов работы и соответствующими значениями 5b, 6b, 7b переменных оценки.
На этапе S52 сначала вновь определяются оптимальные значения 5d, 6d, 7d переменных оценки. То, является ли соответствующее оптимальное значение максимальным значением, минимальным значением или заданным значением, зависит вновь от соответствующего целевого критерия.
Для максимизации энергетической эффективности электрической тяговой машины вновь отыскивается максимальное значение. Но на этот раз по всем режимам работы, так что, соответственно, определяется значение 5b в качестве максимального значения 5d, которое имеет наибольшее значение в рабочей точке 2a оптимального Е-момента. В данном случае это точка 5b режима BA2 работы, так как значение 5b режима BA3 работы и режима BA1 работы является меньшим.
Для мощности аккумуляторной батареи в качестве переменной оценки вновь задается заданное значение 6d, которое установлено как оптимальное значение.
Для смены конфигурации 7 в качестве переменной оценки отыскивается минимальное значение. В качестве минимального значения 7d установлено значение 7b величиной нуль режима 3 работы в качестве оптимального значения. Определенное таким образом оптимальное значение 5d, 6d, 7d для каждой переменной оценки, далее обозначаемое как второе оптимальное значение, справедливо для всех режимов BA1, BA2 и BA3 работы и применяется для определения взвешенного второго отклонения, которое, соответственно, определяется для каждой переменной оценки в каждом режиме работы первого выбора на этапе S53.
Взвешенное второе отклонение 5e, 6e, 7e представляет, соответственно, взвешенное отклонение второго оптимального значения 5d, 6d, 7d соответствующей переменной оценки от значений соответствующей переменной оценки 5b, 6b и т.д. в рабочей точке 2a определенного оптимального распределения мощности для соответствующего режима работы.
Так получается, например, для режима BA2 работы значение 0 для взвешенного второго отклонения 5e рабочей переменной “кпд электрической тяговой машины”, так как второе оптимальное значение 5b идентично со значением переменной оценки этого режима работы. Напротив, для режима BA3 работы получается положительная эквивалентная разность взвешенного второго отклонения 5e. Напротив, для взвешенного второго отклонения 7е режима ВА3 работы получается, например, значение 0, в то время как взвешенное второе отклонение 7e для режима BA2 работы дает положительное эквивалентное значение и т.д.
Наконец, на этапе S54 осуществляется определение оптимального режима работы с применением второго правила решения, согласно которому режимы BA1, BA2 и BA3 работы, соответственно, оцениваются в зависимости от взвешенных вторых отклонений 5e, 6e и 7e переменных оценки, и на этой основе определяется оптимальный режим работы.
В данном случае в качестве правила решения не применяется применявшееся перед этим минимаксное правило решения. Согласно второму правилу решения, взвешенные вторые отклонения 5e, 6e, 7e переменных оценки соответствующего режима работы суммируются, в результате чего получаются точки Σ1, Σ2 и Σ3. Затем определяется наименьшее из этих суммарных значений, что в данном случае соответствует значению Σ2. Затем в качестве оптимального режима 3 работы устанавливается тот режим работы, который имеет наименьшее из этих суммарных значений. Таким образом, в данном случае режим BA2 работы устанавливается в качестве оптимального режима работы. Оптимальный режим BA2 работы, который соответствует снижению в точке приложения нагрузки, затем устанавливается устройством управления в качестве текущего режима работы, причем в этом режиме работы определенное перед этим оптимальное распределение мощности в форме оптимального момента Е-машины величиной немного выше 200 Нм задается в качестве момента Е-машины.
Затем осуществляется повторное вычисление оптимального режима 3 работы в последовательности этапов S2-S5.
Хотя изобретение было описано со ссылками на определенные примеры выполнения, для специалиста должно быть очевидно, что могут выполняться различные изменения и применяться эквиваленты в качестве замены без отклонения от объема изобретения. Дополнительно могут быть осуществлены многие усовершенствованные варианты выполнения без отклонения от объема изобретения. Следовательно, изобретение не должно ограничиваться раскрытыми примерами выполнения, а должно охватывать все примеры выполнения, которые входят в объем приложенной формулы изобретения. В частности, изобретение также испрашивает защиту объекта и признаков зависимых пунктов формулы изобретения независимо от пунктов, на которые они ссылаются.
ПЕРЕЧЕНЬ ССЫЛОЧНЫХ ПОЗИЦИЙ
1a общее количество возможных режимов работы
1b количество возможных режимов работы для заданного состояния движения транспортного средства
1c первый выбор возможного режима работы
2 возможные моменты Е-машины для одного режима работы
2a оптимальный момент Е-машины для одного режима работы
3 оптимальный режим работы
4 управление транспортным средством
4a параметрические поверхности кпд
5 возможные значения переменной оценки “кпд электрической тяговой машины”
5a первое оптимальное значение переменной “кпд”
5b значение переменной “кпд” в рабочей точке оптимального момента Е-машины
5c характеристика взвешенного первого отклонения переменной оценки “кпд”
5d второе оптимальное значение переменной “кпд”
5e второе взвешенное отклонение переменной оценки “кпд”
6 возможные значения переменной оценки “мощность аккумуляторной батареи”
6a первое оптимальное значение переменной “мощность аккумуляторной батареи”
6b значение переменной “мощность аккумуляторной батареи” в рабочей точке оптимального момента Е-машины
6c характеристика взвешенного первого отклонения переменной оценки “мощность аккумуляторной батареи”
6d второе оптимальное значение переменной “мощность аккумуляторной батареи”
6e второе взвешенное отклонение переменной оценки “мощность аккумуляторной батареи”
7 возможные значения третьей переменной оценки
7a первое оптимальное значение третьей переменной оценки
7b значение третьей переменной оценки в рабочей точке оптимального момента Е-машины
7c характеристика взвешенного первого отклонения третьей переменной оценки
7d второе оптимальное значение третьей переменной
7e второе взвешенное отклонение третьей переменной оценки
9 исключенные Е-моменты согласно критериям исключения
10 минимаксная кривая
10a минимум минимаксной кривой
11 состояния движения транспортного средства
12 сопоставление возможных режимов работы с определенными состояниями движения транспортного средства
Изобретение относится к гибридным транспортным средствам. В способе выбора режима работы гибридного транспортного средства определяют переменную оценки для каждого из заданных целевых критериев. При этом для каждого режима работы первого выбора возможных режимов работы определяют возможные распределения мощности в трансмиссии. Для каждого режима работы первого выбора определяют значения переменных оценки для каждого из определенных распределений мощности соответствующего режима работ. Определяют оптимальное распределение мощности в трансмиссии посредством определенных значений переменных оценки для соответствующего режима работы. Выбирают оптимальный режим работы посредством тех значений переменных оценки, которые указывают на него для режимов работы первого выбора соответственно в рабочей точке определенного оптимального распределения мощности. Оптимизируется работа транспортного средства. 2 н. и 10 з.п. ф-лы, 8 ил.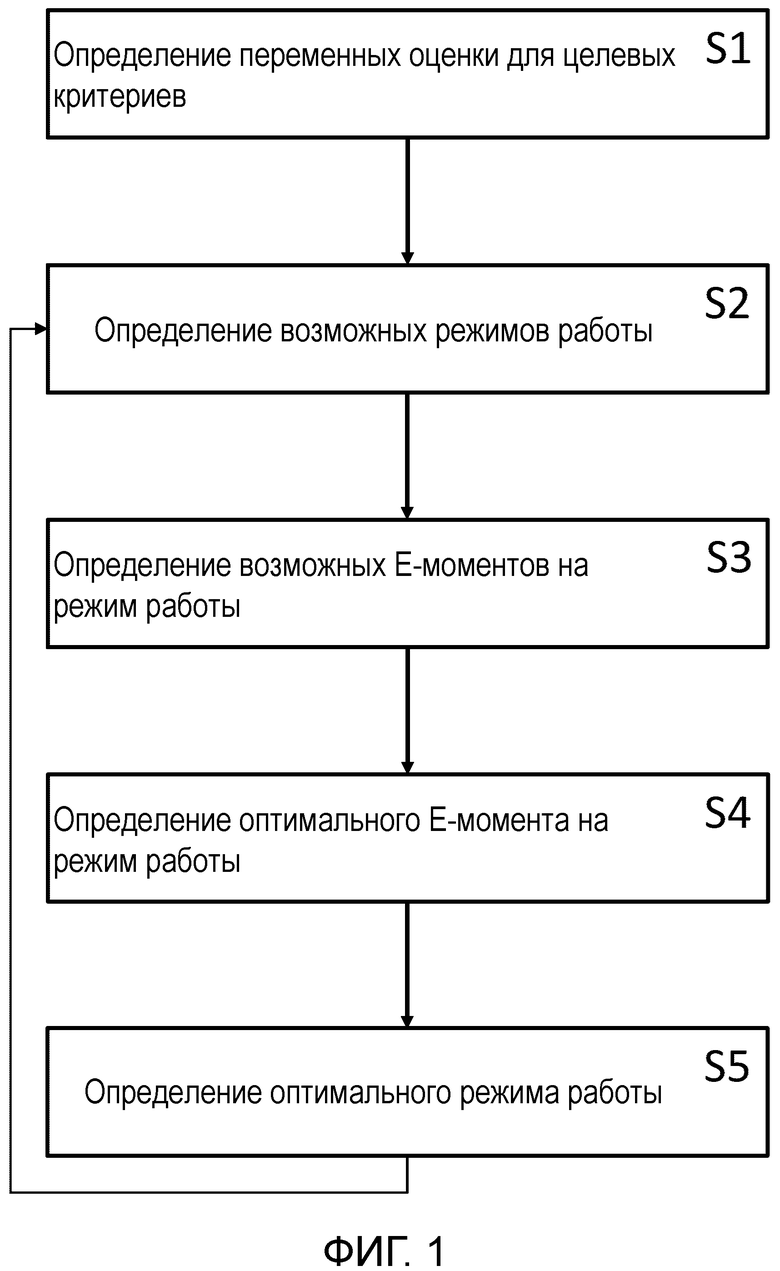
1. Способ выбора режима работы гибридного транспортного средства, в котором из заданного количества возможных режимов работы (1a) гибридной трансмиссии выбирают режим работы, оптимальный для текущего рабочего момента времени по отношению к заданным целевым критериям, с соответствующим оптимальным распределением мощности в трансмиссии, причем определяют (S1) по меньшей мере одну переменную оценки для каждого из заданных целевых критериев для количественного описания соответствующего целевого критерия, отличающийся следующими этапами:
для каждого режима работы первого выбора (1c) возможных режимов работы определяют (S3) возможные распределения (2) мощности в трансмиссии; и
для каждого режима работы первого выбора определяют значения (5, 6, 7) переменных оценки для каждого из определенных распределений (2) мощности соответствующего режима работы и определяют (S4) оптимальное распределение (2а) мощности в трансмиссии посредством определенных значений переменных оценки для соответствующего режима работы; и
выбирают (S5) оптимальный режим работы посредством тех значений переменных оценки, которые указывают на него для режимов работы первого выбора соответственно в рабочей точке определенного оптимального распределения мощности.
2. Способ по п. 1, отличающийся тем, что для определения (S4) оптимального распределения мощности для каждого режима работы первого выбора выполняют следующие этапы для каждого режима работы первого выбора:
(a) для каждой переменной оценки определяют (S42) первое оптимальное значение (5a, 6a, 7a) переменной оценки в соответствующем режиме работы, причем первое оптимальное значение предпочтительно
(a1) устанавливают как экстремальное значение (5a, 7a) определенных значений переменной оценки в соответствующем режиме работы, если цель, описываемая переменной оценки, является целью экстремизации, и
(a2) задают как заданное значение (6а), независимое от определенных значений переменной оценки в соответствующем режиме работы, если цель, описываемая переменной оценки, является целью аппроксимации;
(b) для каждой переменной оценки определяют (S43) взвешенные первые отклонения (5c, 6c, 7c) значений соответствующей переменной оценки от определенного первого оптимального значения (5a, 6a, 7a) соответствующей переменной оценки; и
(c) определяют (S44) оптимальное распределение мощности соответствующего режима работы с применением предопределенного первого правила решения, которое в зависимости от определенных взвешенных первых отклонений (5c, 6c, 7c) переменных оценки устанавливает оптимальное распределение (2а) мощности (S44).
3. Способ по п. 2, отличающийся тем, что для выбора оптимального режима работы из первого выбора возможных режимов работы выполняют следующие этапы:
(a) для каждой переменной оценки определяют (S52) действительный для всех режимов работы первый выбор второго оптимального значения (5d, 6d, 7d) переменной оценки, причем второе оптимальное значение предпочтительно
(a1) устанавливают как экстремальное значение из значений (5b, 7b) соответствующих переменных оценки в рабочей точке определенного оптимального распределения мощности во всех режимах работы первого выбора, если цель, описываемая переменной оценки, является целью экстремизации, и
(a2) задают как заданное значение (6d), независимое от определенных значений (5b, 7b) соответствующей переменной оценки, если цель, описываемая переменной оценки, является целью аппроксимации;
(b) определяют (S53) взвешенное второе отклонение (5e, 6e, 7e), которое определяют соответственно для каждой переменной оценки в каждом режиме работы первого выбора и которое указывает соответственно взвешенное отклонение второго оптимального значения (5d, 6d, 7d) соответствующей переменной оценки от значения переменных оценки в рабочей точке (2a) определенного оптимального распределения мощности для соответствующего режима работы;
(c) выбирают (S54) оптимальный режим работы с применением предопределенного второго правила решения, которое оценивает режимы работы первого выбора соответственно в зависимости от взвешенных вторых отклонений (5e, 6e, 7e) переменных оценки и устанавливает оптимальный режим работы (BA2).
4. Способ по п. 2 или 3, отличающийся по меньшей мере одним весовым коэффициентом для каждой переменной оценки для определения взвешенных
(a) первых отклонений (5c, 6c, 7c), который масштабирует эквивалентную разность значений переменных оценки от первого оптимального значения соответствующей переменной оценки на безразмерную базу или общую для всех переменных оценки базу затрат; и/или
(b) вторых отклонений (5e, 6e, 7e, 8e), который масштабирует эквивалентную разность значений переменных оценки от второго оптимального значения соответствующей переменной оценки на безразмерную базу или общую для всех переменных оценки базу затрат.
5. Способ по п. 3, отличающийся тем,
(a) что согласно второму правилу решения суммируют взвешенные вторые отклонения (5e, 6e, 7e, 8e) переменных оценки соответствующего режима работы и в качестве оптимального режима работы устанавливают тот режим работы, у которого суммарное значение (S2) просуммированных вторых отклонений (Σ1, Σ2, Σ3) является минимальным; и/или
(b1) что первое правило решения является минимаксным правилом решения, и/или
(b2) что согласно первому правилу решения в каждой рабочей точке возможных распределений мощности режима работы соответственно из значений взвешенных первых отклонений (5c, 6c, 7c) переменных оценки определяют наибольшее первое отклонение (10), и в качестве оптимального распределения мощности устанавливают ту рабочую точку (2a), которая имеет наименьшее (10a) из определенных наибольших первых отклонений (10).
6. Способ по п.1, отличающийся тем, что определение первого выбора режимов работы включает в себя следующие этапы:
(a) задание возможных состояний (11) движения транспортного средства для гибридного транспортного средства из возможных режимов работы трансмиссии и сопоставления (12), которое указывает, какие из возможных режимов работы допустимы в каком состоянии движения транспортного средства;
b) определение текущего состояния движения транспортного средства; и
(c) ограничение (S21) режимов работы транспортного средства теми, которые сопоставлены с определенным текущим состоянием движения транспортного средства.
7. Способ по п. 6, отличающийся тем, что определение первого выбора режимов работы включает в себя следующие этапы:
(a) задание по меньшей мере одного правила решения, которое в зависимости от по меньшей мере одного рабочего параметра и независимо от текущего запроса момента и текущего состояния движения транспортного средства устанавливает, какие режимы работы в текущий момент предоставлены в распоряжение; и
(b) ограничение (S22) режимов работы транспортного средства теми, которые согласно по меньшей мере одному правилу ограничения в текущий момент предоставлены в распоряжение.
8. Способ по п. 7, отличающийся тем, что согласно по меньшей мере одному правилу ограничения проверяют доступность компонентов в трансмиссии, в частности электрического аккумулятора энергии и/или электрической тяговой машины.
9. Способ по п. 2, отличающийся тем, что
(a) на основе предопределенных критериев исключения определяют значения (9) распределения мощности режимов работы, которые должны исключаться как возможные рабочие точки, и
(b) для определения (S45) оптимального распределения мощности для каждого режима работы первого выбора применяют только те значения возможного распределения мощности и соответствующие сопоставленные значения переменных оценки, которые не были исключены посредством критериев исключения.
10. Способ по п.8, отличающийся тем, что
(a) транспортное средство является параллельно-гибридным транспортным средством; и
(b) для каждого режима работы определяют возможные распределения мощности в трансмиссии как моменты, создаваемые электрической тяговой машиной, с учетом производительностей компонентов в трансмиссии; и
(c) оптимальное распределение мощности определяют через момент (2а) электрической тяговой машины, оптимальный по отношению к заданным целевым критериям.
11. Способ по п.1, отличающийся тем, что возможные режимы работы трансмиссии включают в себя по меньшей мере некоторые из следующих режимов работы: движение чисто за счет двигателя внутреннего сгорания, чисто электрическое движение при выключенном двигателе внутреннего сгорания, электрическое движение с двигателем внутреннего сгорания в режиме холостого хода, бустерный режим, рекуперация при торможении, электрический разгон, повышение в точке приложения нагрузки, снижение в точке приложения нагрузки и так называемый GenSet-режим.
12. Гибридное транспортное средство, в частности грузовой автомобиль, имеющее устройство управления для выбора режима работы гибридного транспортного средства, которое выполнено с возможностью осуществления способа согласно одному из пп.1-11.
| US 2015051775 A1, 19.02.2015 | |||
| US 2011130901 A1, 02.06.2011 | |||
| DE 102007019989 A1, 30.10.2008 | |||
| FR 3001427 A1, 01.08.2014 | |||
| DE 102008042781 A1, 22.04.2010 | |||
| ГИБРИДНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2008 |
|
RU2480348C2 |
| СИСТЕМА И СПОСОБ УПРАВЛЕНИЯ ДЛЯ ГИБРИДНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2011 |
|
RU2527653C1 |

