Изобретение относится к радиолокации и может быть использовано для селекции ложных воздушных целей по поляризационным характеристикам отраженных сигналов.
Наиболее близким по технической сущности к заявленному способу (прототип) является способ селекции ложных воздушных целей (пат. РФ 2280263 Рос. Федерация: МПК G01S 13/52 / Прохоркин А.Г., Митрофанов Д.Г., Оверченко А.Г., Маркевич А.А., Романенко А.В., Амбраменков Д.Г.; заявитель и патентообладатель Митрофанов Д.Г. заявл. 31.01.05; опубл. 20.07.06, Бюл. №20), заключается в том, что с помощью радиолокационной станции в течение интервала времени Δt излучают в направлении выбранной цели импульсные зондирующие сигналы, принимают отраженные от цели сигналы, амплитуды которых запоминают в оперативном запоминающем устройстве и создают из запомненных амплитуд массив данных. При использовании в радиолокационной станции фазированной антенной решетки ведут одновременное сопровождение М целей (M<10) методом последовательного обращения луча фазированной антенной решетки к 1-й, 2-й, …, m-й, … и M-й цели, причем при зондировании применяют импульсные сигналы с поимпульсной перестройкой частоты на ΔF/N от  до
до  , где ΔF - диапазон перестройки частоты, N - число используемых частот, составляющее от 30 до 300, так что n-й сигнал N-импульсной последовательности излучают на частоте
, где ΔF - диапазон перестройки частоты, N - число используемых частот, составляющее от 30 до 300, так что n-й сигнал N-импульсной последовательности излучают на частоте  , к каждой цели обращаются в течение одного времени Δt, составляющего 4,5 мс, при этом в течение первого интервала времени Δt излучают сигналы в направлении первой цели, в течение второго интервала Δt - в направлении второй цели и так далее до M-го интервала Δt, в течение которого излучают сигналы в направлении М-й цели, причем интервалы Δt между собой не пересекаются и не имеют разрывов во времени, т.е. конец каждого предыдущего интервала совпадает с началом последующего, так что длительность одного цикла обращения к М целям составляет M×Δt, для полученного в течение интервала Δt целого числа KN-частотных импульсных последовательностей вычисляют величину
, к каждой цели обращаются в течение одного времени Δt, составляющего 4,5 мс, при этом в течение первого интервала времени Δt излучают сигналы в направлении первой цели, в течение второго интервала Δt - в направлении второй цели и так далее до M-го интервала Δt, в течение которого излучают сигналы в направлении М-й цели, причем интервалы Δt между собой не пересекаются и не имеют разрывов во времени, т.е. конец каждого предыдущего интервала совпадает с началом последующего, так что длительность одного цикла обращения к М целям составляет M×Δt, для полученного в течение интервала Δt целого числа KN-частотных импульсных последовательностей вычисляют величину  по формуле
по формуле  , находят число K по формуле
, находят число K по формуле
 ,
,
где  - минимально возможный период повторения импульсов в радиолокационной станции, а
- минимально возможный период повторения импульсов в радиолокационной станции, а  - функция определения целой части числа, рассчитывают рабочий период повторения импульсов
- функция определения целой части числа, рассчитывают рабочий период повторения импульсов  по формуле
по формуле  и используют этот период повторения в течение всего времени сопровождения М целей, запоминание амплитуд отраженных от m-й цели сигналов производят в соответствующем m-м частном массиве Wm, состоящем из K столбцов и N строк, так что в каждом k-м столбце частного массива
и используют этот период повторения в течение всего времени сопровождения М целей, запоминание амплитуд отраженных от m-й цели сигналов производят в соответствующем m-м частном массиве Wm, состоящем из K столбцов и N строк, так что в каждом k-м столбце частного массива  амплитуда отраженного сигнала изменяется в соответствии с линейным изменением частоты от импульса к импульсу, на первом этапе селекции для определения в m-м целевом канале сопровождения оценки изрезанности амплитудно-частотной характеристики m-й цели вычисляют по данным k-го столбца частного массива Wm величину оценки
амплитуда отраженного сигнала изменяется в соответствии с линейным изменением частоты от импульса к импульсу, на первом этапе селекции для определения в m-м целевом канале сопровождения оценки изрезанности амплитудно-частотной характеристики m-й цели вычисляют по данным k-го столбца частного массива Wm величину оценки
где  и
и  - соответственно значения амплитуд отраженного m-й целью сигнала на n-й и на (n-1)-й частотах в k-м столбце, затем усредняют оценки изрезанности амплитудно-частотных характеристик m-й цели, вычисленных в K столбцах частного массива Wm по формуле
- соответственно значения амплитуд отраженного m-й целью сигнала на n-й и на (n-1)-й частотах в k-м столбце, затем усредняют оценки изрезанности амплитудно-частотных характеристик m-й цели, вычисленных в K столбцах частного массива Wm по формуле
вычисленную для m-й цели усредненную оценку  сравнивают с заранее установленным пороговым значением ΔUпор, в случае превышения порога величиной оценки
сравнивают с заранее установленным пороговым значением ΔUпор, в случае превышения порога величиной оценки  порогового значения сразу принимают окончательное решение об отнесении m-й цели к классу реальных воздушных целей, в противном случае принимают предварительно решение о наличии малоразмерной воздушной цели, которой может быть малогабаритный объект с линейными размерами до 1-2 м или ложная цель, уточняют это решение на втором этапе селекции, для чего определяют для m-й цели среднее значение отраженного сигнала в пределах частного массива Wm по формуле
порогового значения сразу принимают окончательное решение об отнесении m-й цели к классу реальных воздушных целей, в противном случае принимают предварительно решение о наличии малоразмерной воздушной цели, которой может быть малогабаритный объект с линейными размерами до 1-2 м или ложная цель, уточняют это решение на втором этапе селекции, для чего определяют для m-й цели среднее значение отраженного сигнала в пределах частного массива Wm по формуле
принимают значение σm оценку эффективности площади рассеяния m-й цели, сравнивают величину σm с заранее установленным пороговым значением σпор и в случае превышения пороговой величины принимают окончательное решение об отнесении m-й цели к классу ложных целей, в противном случае принимают окончательное решение об отнесении m-й цели к классу реальных воздушных целей.
Основным недостатком данного способа является снижение вероятности правильной селекции ложных воздушных целей типа MALD, обусловленное возможностью современной ложной цели типа MALD переизлучать принятые последовательности радиоимпульсов в сторону РЛС с дополнительной модуляцией сигналов с учетом ТВЭ и усилением их по амплитуде до заданного уровня эффективной площади рассеяния реальной воздушной цели (см., например, Moran М., Smiley R.,  S., Electronic Warfare and Radar Systems Engineering Handbook. - California.: Naval Air Warfare Center Weapons Division, 2013, 455 p.).
S., Electronic Warfare and Radar Systems Engineering Handbook. - California.: Naval Air Warfare Center Weapons Division, 2013, 455 p.).
Техническим результатом изобретения является повышение вероятности правильной селекции современных ложных воздушных целей типа MALD за счет использования поляризационного признака, неподдающегося имитации современными ложными целями типа MALD.
Указанный технический результат достигается тем, что в известном способе селекции ложных воздушных целей, заключающемся в том, что с помощью радиолокационной станции в течение интервала времени Δt излучают в направлении выбранной цели импульсные зондирующие сигналы, принимают отраженные от цели сигналы, амплитуды которых запоминают в оперативном запоминающем устройстве и создают из запомненных амплитуд массив данных, при этом в радиолокационной станции с помощью фазированной антенной решетки ведут одновременное сопровождение М целей (М<10) методом последовательного обращения луча фазированной антенной решетки к 1-й, 2-й, …, m-й, …. и M-й цели, причем при зондировании применяют импульсные сигналы с поимпульсной перестройкой частоты на ΔF/N от  до
до  , где ΔF - диапазон перестройки частоты, N - число используемых частот, так что n-й сигнал N-импульсной последовательности излучают на частоте
, где ΔF - диапазон перестройки частоты, N - число используемых частот, так что n-й сигнал N-импульсной последовательности излучают на частоте  , к каждой цели обращаются в течение одного времени Δt, при этом в течение первого интервала времени Δt излучают сигналы в направлении первой цели, в течение второго интервала Δt - в направлении второй цели и так далее до M-го интервала Δt, в течение которого излучают сигналы в направлении М-й цели, причем интервалы Δt между собой не пересекаются и не имеют разрывов во времени, т.е. конец каждого предыдущего интервала совпадает с началом последующего, так что длительность одного цикла обращения к М целям составляет M×Δt, для полученного в течение интервала Δt целого числа KN-частотных импульсных последовательностей вычисляют величину максимально возможного периода повторения импульсов для этого Δt делят на число используемых частот, находят число импульсных последовательностей
, к каждой цели обращаются в течение одного времени Δt, при этом в течение первого интервала времени Δt излучают сигналы в направлении первой цели, в течение второго интервала Δt - в направлении второй цели и так далее до M-го интервала Δt, в течение которого излучают сигналы в направлении М-й цели, причем интервалы Δt между собой не пересекаются и не имеют разрывов во времени, т.е. конец каждого предыдущего интервала совпадает с началом последующего, так что длительность одного цикла обращения к М целям составляет M×Δt, для полученного в течение интервала Δt целого числа KN-частотных импульсных последовательностей вычисляют величину максимально возможного периода повторения импульсов для этого Δt делят на число используемых частот, находят число импульсных последовательностей  , рассчитывают рабочий период повторения импульсов по формуле
, рассчитывают рабочий период повторения импульсов по формуле  и используют этот период повторения в течение всего времени сопровождения М целей, запоминание амплитуд отраженных от m-й цели сигналов производят в соответствующем m-м частном массиве Wm, состоящем из K столбцов и N строк, так что в каждом k-м столбце частного массива
и используют этот период повторения в течение всего времени сопровождения М целей, запоминание амплитуд отраженных от m-й цели сигналов производят в соответствующем m-м частном массиве Wm, состоящем из K столбцов и N строк, так что в каждом k-м столбце частного массива  амплитуда отраженного сигнала изменяется в соответствии с линейным изменением частоты от импульса к импульсу, на первом этапе селекции для определения в m-м целевом канале сопровождения оценки изрезанности амплитудно-частотной характеристики m-й цели вычисляют по данным k-го столбца частного массива Wm величину оценки
амплитуда отраженного сигнала изменяется в соответствии с линейным изменением частоты от импульса к импульсу, на первом этапе селекции для определения в m-м целевом канале сопровождения оценки изрезанности амплитудно-частотной характеристики m-й цели вычисляют по данным k-го столбца частного массива Wm величину оценки
где  и
и  - соответственно значения амплитуд отраженного m-й целью сигнала на n-й и на (n-1)-й частотах в k-м столбце, затем усредняют оценки изрезанности амплитудно-частотных характеристик m-й цели, вычисленные в K столбцах частного массива Wm по формуле
- соответственно значения амплитуд отраженного m-й целью сигнала на n-й и на (n-1)-й частотах в k-м столбце, затем усредняют оценки изрезанности амплитудно-частотных характеристик m-й цели, вычисленные в K столбцах частного массива Wm по формуле
вычисленную для m-й цели усредненную оценку  сравнивают с заранее установленным пороговым значением ΔUnop, в случае превышения порога величиной оценки
сравнивают с заранее установленным пороговым значением ΔUnop, в случае превышения порога величиной оценки  порогового значения сразу принимают окончательное решение об отнесении m-й цели к классу реальных воздушных целей, в противном случае принимают предварительное решение о наличии малоразмерной воздушной цели, которой может быть малогабаритный объект с линейными размерами до 1-2 м или ложная цель, уточняют это решение на втором этапе селекции, для чего определяют для и m-й цели среднее значение отраженного сигнала в пределах частного массива Wm по формуле
порогового значения сразу принимают окончательное решение об отнесении m-й цели к классу реальных воздушных целей, в противном случае принимают предварительное решение о наличии малоразмерной воздушной цели, которой может быть малогабаритный объект с линейными размерами до 1-2 м или ложная цель, уточняют это решение на втором этапе селекции, для чего определяют для и m-й цели среднее значение отраженного сигнала в пределах частного массива Wm по формуле
принимают значение σm за оценку эффективности площади рассеяния m-й цели, сравнивают величину σm с заранее установленным пороговым значением σпор и в случае превышения пороговой величины принимают окончательное решение об отнесении m-й цели к классу ложных целей, в противном случае принимают окончательное решение об отнесении m-й цели к классу реальных воздушных целей, дополнительно рассчитываются оценки поимпульсной суммарной разности амплитуд сигналов отраженных от m-й цели на четырех поляризациях (двух коллинеарных и двух ортогональных), с помощью радиолокационной станции (РЛС) в течение интервала времени Δt излучают в направлении каждой выбранной цели импульсные последовательности поочередно приемо-передающими каналами с двумя активными фазированными антенными решетками (АФАР) с горизонтальной и вертикальной поляризациями электромагнитных волн (ЭМВ), принимают отраженные от цели импульсные последовательности, амплитуды которых запоминают в оперативном запоминающем устройстве и формируют из запомненных амплитуд массив данных, ведут одновременное сопровождение М целей методом последовательного обращения лучей двух АФАР с вертикальной и горизонтальной поляризациями ЭМВ к 1-й, 2-й, m-й, … и М-й цели, так что длительность одного цикла обращения к М целям составляет M×Δt, для полученного в течение интервала Δt целого числа K'N -частотных импульсных последовательностей вычисляют максимально возможный период повторения импульсов в РЛС  , находят число импульсных последовательностей
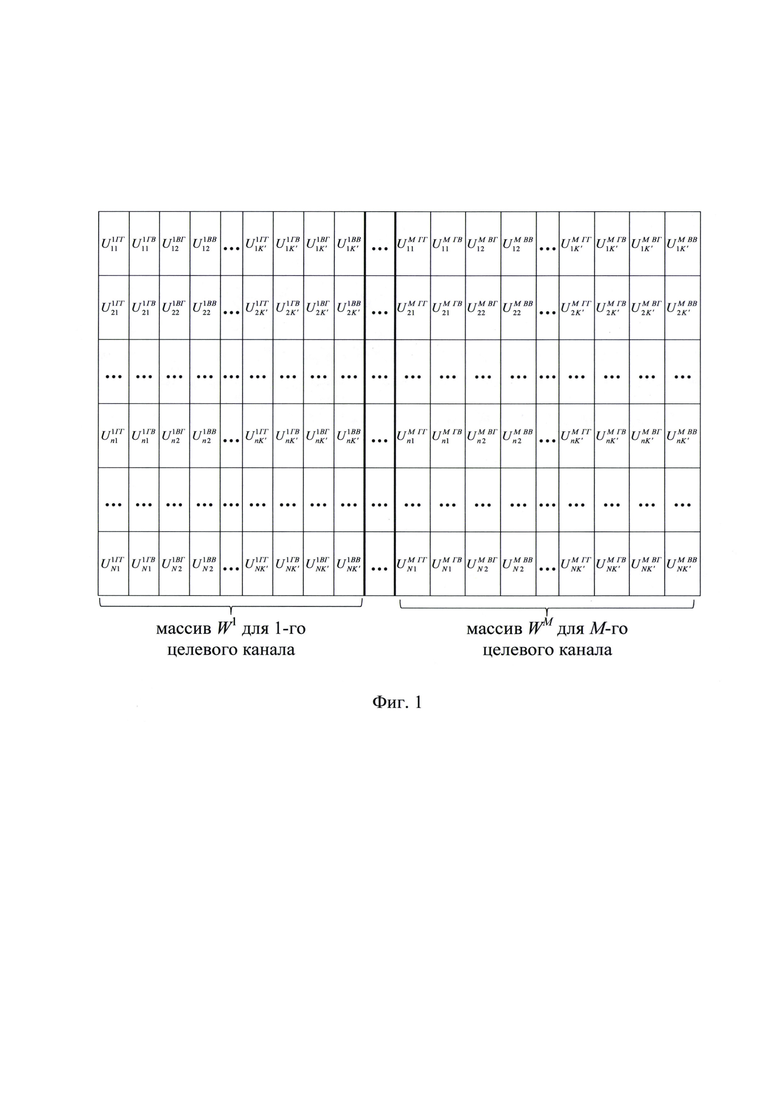
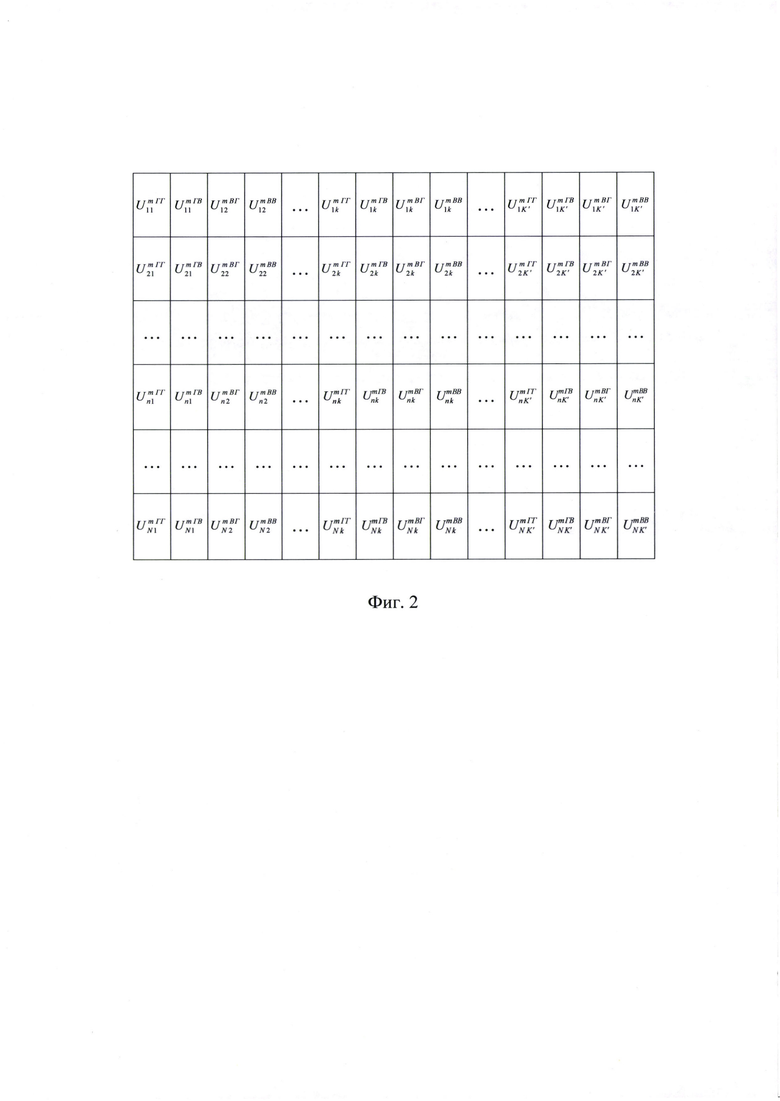
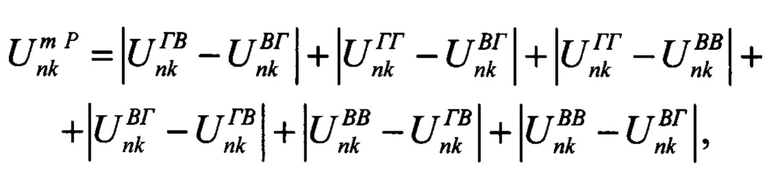
, находят число импульсных последовательностей  , запоминание амплитуд отраженных от m-й цели сигналов на четырех поляризациях (двух коллинеарных и двух ортогональных) осуществляют в соответствующем m-м частном двумерном массиве данных Wm (фиг. 2), размером N×K', из частных массивов Wm для отдельных m-x целей формируют генеральный массив W (фиг. 1), содержащий информацию об отраженных сигналах всех М целей, сопровождаемых РЛС, при этом определяют оценки поимпульсной суммарной разности амплитуд сигналов, отраженных от m-й цели на четырех поляризациях (двух коллинеарных и двух ортогональных) производят вычисления по формуле
, запоминание амплитуд отраженных от m-й цели сигналов на четырех поляризациях (двух коллинеарных и двух ортогональных) осуществляют в соответствующем m-м частном двумерном массиве данных Wm (фиг. 2), размером N×K', из частных массивов Wm для отдельных m-x целей формируют генеральный массив W (фиг. 1), содержащий информацию об отраженных сигналах всех М целей, сопровождаемых РЛС, при этом определяют оценки поимпульсной суммарной разности амплитуд сигналов, отраженных от m-й цели на четырех поляризациях (двух коллинеарных и двух ортогональных) производят вычисления по формуле
где  - амплитуда n-го импульса, полученная при излучении в направлении выбранной m-й цели последовательности радиоимпульсов каналом с АФАР с горизонтальной поляризацией ЭМВ и приеме отраженной последовательности радиоимпульсов от m-й цели каналом с АФАР с горизонтальной поляризацией ЭМВ,
- амплитуда n-го импульса, полученная при излучении в направлении выбранной m-й цели последовательности радиоимпульсов каналом с АФАР с горизонтальной поляризацией ЭМВ и приеме отраженной последовательности радиоимпульсов от m-й цели каналом с АФАР с горизонтальной поляризацией ЭМВ,  - амплитуда n-го импульса, полученная при излучении в направлении выбранной m-й цели последовательности радиоимпульсов каналом с АФАР с вертикальной поляризацией ЭМВ и приеме отраженной последовательности радиоимпульсов от m-й цели каналом с АФАР с горизонтальной поляризацией ЭМВ,
- амплитуда n-го импульса, полученная при излучении в направлении выбранной m-й цели последовательности радиоимпульсов каналом с АФАР с вертикальной поляризацией ЭМВ и приеме отраженной последовательности радиоимпульсов от m-й цели каналом с АФАР с горизонтальной поляризацией ЭМВ,  - амплитуда n-го импульса, полученная при излучении в направлении выбранной m-й цели последовательности радиоимпульсов каналом с АФАР с горизонтальной поляризацией ЭМВ и приеме отраженной последовательности радиоимпульсов от m-й цели каналом с АФАР с вертикальной поляризацией ЭМВ,
- амплитуда n-го импульса, полученная при излучении в направлении выбранной m-й цели последовательности радиоимпульсов каналом с АФАР с горизонтальной поляризацией ЭМВ и приеме отраженной последовательности радиоимпульсов от m-й цели каналом с АФАР с вертикальной поляризацией ЭМВ,  - амплитуда n-го импульса, полученная при излучении в направлении выбранной m-й цели последовательности радиоимпульсов каналом с АФАР с вертикальной поляризацией ЭМВ и приеме отраженной последовательности радиоимпульсов от m-й цели каналом с АФАР с вертикальной поляризацией ЭМВ, рассчитывают средние значения суммарно-разностных амплитуд поляризационной матрицы, для чего определяют для m-й цели среднее значение отраженного поляризационного сигнала в пределах частного массива Wm по формуле
- амплитуда n-го импульса, полученная при излучении в направлении выбранной m-й цели последовательности радиоимпульсов каналом с АФАР с вертикальной поляризацией ЭМВ и приеме отраженной последовательности радиоимпульсов от m-й цели каналом с АФАР с вертикальной поляризацией ЭМВ, рассчитывают средние значения суммарно-разностных амплитуд поляризационной матрицы, для чего определяют для m-й цели среднее значение отраженного поляризационного сигнала в пределах частного массива Wm по формуле
принимают значение σm за оценку средней суммарно-разностной амплитуды m-й цели, сравнивают величину σm с заранее установленным пороговым значением σпор и в случае превышения пороговой величины принимают окончательное решение об отнесении m-й цели к классу реальных целей, в противном случае принимают окончательное решение об отнесении m-й цели к классу ложных воздушных целей.
За счет этого происходит повышение вероятности правильной селекции ложных воздушных целей.
Сущность изобретения заключается в том, что с помощью радиолокационной станции (РЛС) в течение интервала времени Δt излучают в направлении каждой выбранной цели импульсные последовательности поочередно приемо-передающими каналами с двумя активными фазированными антенными решетками (см., например, Нечаев Е.Е., Дерябин К.С.Современные бортовые радиолокационные станции и антенные решетки многофункциональных авиационных комплексов военного назначения // Научный вестник МГТУ ГА. 2015. №221. с. 90-105) с горизонтальной и вертикальной поляризациями электромагнитных волн (см., например, Канарейкин Д.Б., Павлов Н.Ф., Потехин В.А. Поляризация радиолокационных сигналов. - М.: Советское радио, 1966, с. 280), принимают отраженные от цели импульсные последовательности, амплитуды которых запоминают в оперативном запоминающем устройстве и формируют из запомненных амплитуд массив данных, ведут одновременное сопровождение М целей методом последовательного обращения лучей двух АФАР с вертикальной и горизонтальной поляризациями ЭМВ к 1-й, 2-й, …, m-й, … и М-й цели, так что длительность одного цикла обращения к М целям составляет M×Δt, для полученного в течение интервала Δt целого числа K'N - частотных импульсных последовательностей вычисляют максимально возможный период повторения импульсов в РЛС  , находят число импульсных последовательностей,
, находят число импульсных последовательностей,  , запоминание амплитуд отраженных от m-й цели сигналов на четырех поляризациях (двух коллинеарных и двух ортогональных) осуществляют в соответствующем m-м частном двумерном массиве данных Wm (фиг. 2), размером N×K', из частных массивов Wm для отдельных m-х целей формируют генеральный массив W (фиг. 1), содержащий информацию об отраженных сигналах всех М целей, сопровождаемых РЛС, при этом определяют оценки поимпульсной суммарной разности амплитуд сигналов, отраженных от m-й цели на четырех поляризациях (двух коллинеарных и двух ортогональных) производят вычисления по формуле
, запоминание амплитуд отраженных от m-й цели сигналов на четырех поляризациях (двух коллинеарных и двух ортогональных) осуществляют в соответствующем m-м частном двумерном массиве данных Wm (фиг. 2), размером N×K', из частных массивов Wm для отдельных m-х целей формируют генеральный массив W (фиг. 1), содержащий информацию об отраженных сигналах всех М целей, сопровождаемых РЛС, при этом определяют оценки поимпульсной суммарной разности амплитуд сигналов, отраженных от m-й цели на четырех поляризациях (двух коллинеарных и двух ортогональных) производят вычисления по формуле
где  - амплитуда n-го импульса, полученная при излучении в направлении выбранной m-й цели последовательности радиоимпульсов каналом с АФАР с горизонтальной поляризацией ЭМВ и приеме отраженной последовательности радиоимпульсов от m-й цели каналом с АФАР с горизонтальной поляризацией ЭМВ,
- амплитуда n-го импульса, полученная при излучении в направлении выбранной m-й цели последовательности радиоимпульсов каналом с АФАР с горизонтальной поляризацией ЭМВ и приеме отраженной последовательности радиоимпульсов от m-й цели каналом с АФАР с горизонтальной поляризацией ЭМВ,  - амплитуда n-го импульса, полученная при излучении в направлении выбранной m-й цели последовательности радиоимпульсов каналом с АФАР с вертикальной поляризацией ЭМВ и приеме отраженной последовательности радиоимпульсов от m-й цели каналом с АФАР с горизонтальной поляризацией ЭМВ,
- амплитуда n-го импульса, полученная при излучении в направлении выбранной m-й цели последовательности радиоимпульсов каналом с АФАР с вертикальной поляризацией ЭМВ и приеме отраженной последовательности радиоимпульсов от m-й цели каналом с АФАР с горизонтальной поляризацией ЭМВ,  - амплитуда n-го импульса, полученная при излучении в направлении выбранной m-й цели последовательности радиоимпульсов каналом с АФАР с горизонтальной поляризацией ЭМВ и приеме отраженной последовательности радиоимпульсов от m-й цели каналом с АФАР с вертикальной поляризацией ЭМВ,
- амплитуда n-го импульса, полученная при излучении в направлении выбранной m-й цели последовательности радиоимпульсов каналом с АФАР с горизонтальной поляризацией ЭМВ и приеме отраженной последовательности радиоимпульсов от m-й цели каналом с АФАР с вертикальной поляризацией ЭМВ,  - амплитуда n-го импульса, полученная при излучении в направлении выбранной m-й цели последовательности радиоимпульсов каналом с АФАР с вертикальной поляризацией ЭМВ и приеме отраженной последовательности радиоимпульсов от m-й цели каналом с АФАР с вертикальной поляризацией ЭМВ, рассчитывают средние значения суммарно-разностных амплитуд поляризационной матрицы, для чего определяют для m-й цели среднее значение отраженного поляризационного сигнала в пределах частного массива Wm по формуле
- амплитуда n-го импульса, полученная при излучении в направлении выбранной m-й цели последовательности радиоимпульсов каналом с АФАР с вертикальной поляризацией ЭМВ и приеме отраженной последовательности радиоимпульсов от m-й цели каналом с АФАР с вертикальной поляризацией ЭМВ, рассчитывают средние значения суммарно-разностных амплитуд поляризационной матрицы, для чего определяют для m-й цели среднее значение отраженного поляризационного сигнала в пределах частного массива Wm по формуле
принимают значение σm за оценку средней суммарно-разностной амплитуды m-й цели, сравнивают величину σm с заранее установленным пороговым значением σпор и в случае превышения пороговой величины принимают окончательное решение об отнесении m-й цели к классу реальных целей, в противном случае принимают окончательное решение об отнесении m-й цели к классу ложных воздушных целей.
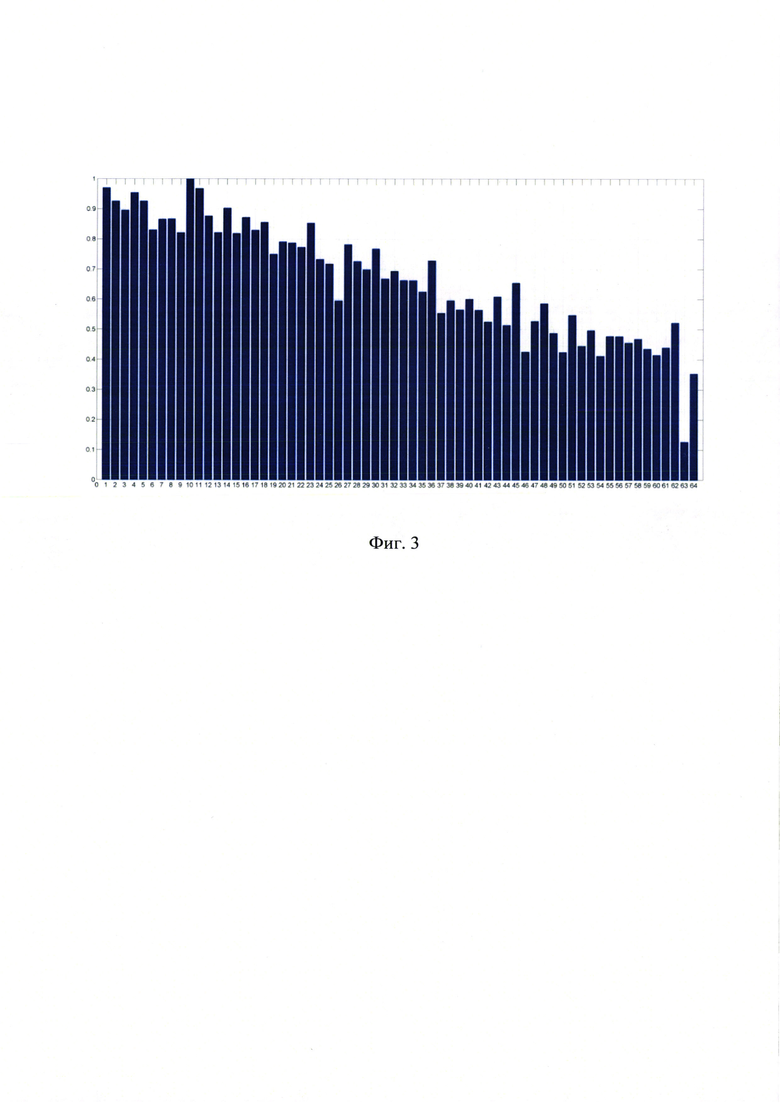
Сущность изобретения поясняют фиг. 3-5.
На фиг. 3 приведены значения амплитуд переизлученных импульсов в сторону РЛС ложной целью типа MALD, имитирующей амплитудную модуляцию и турбовинтовой эффект, при которых алгоритм, приведенный в прототипе, принимает ошибочное решение о наличии реальной воздушной цели, как на первом этапе, так и на втором этапе селекции.
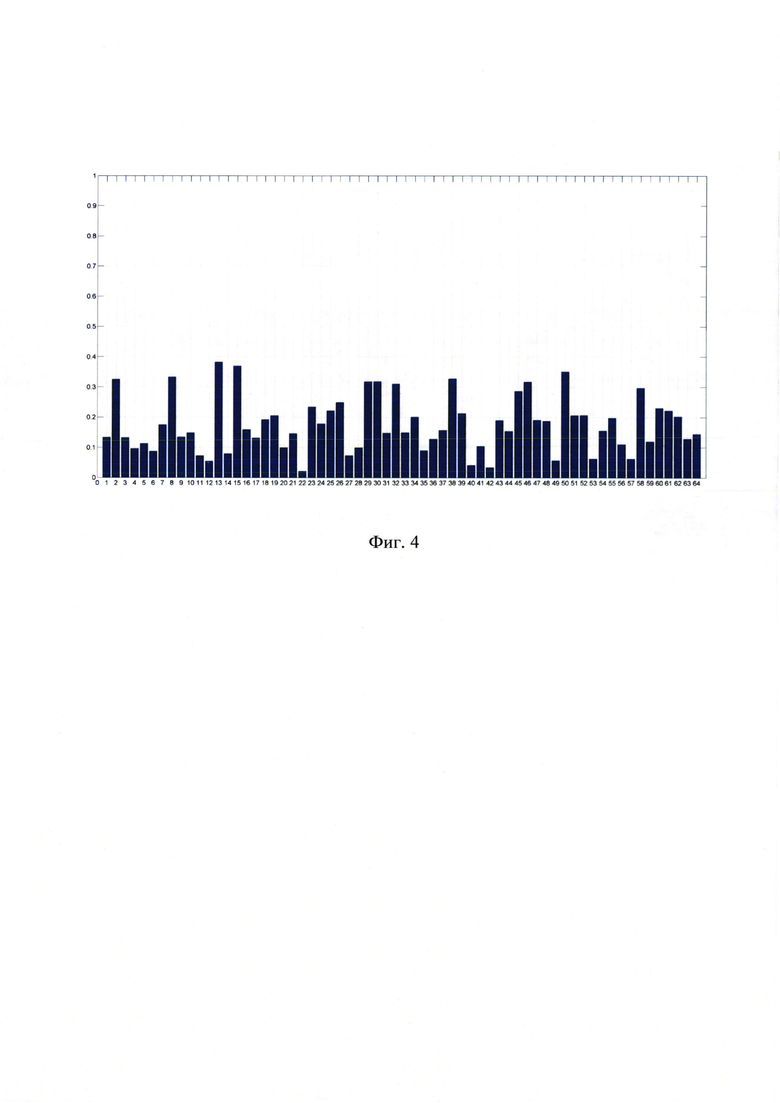
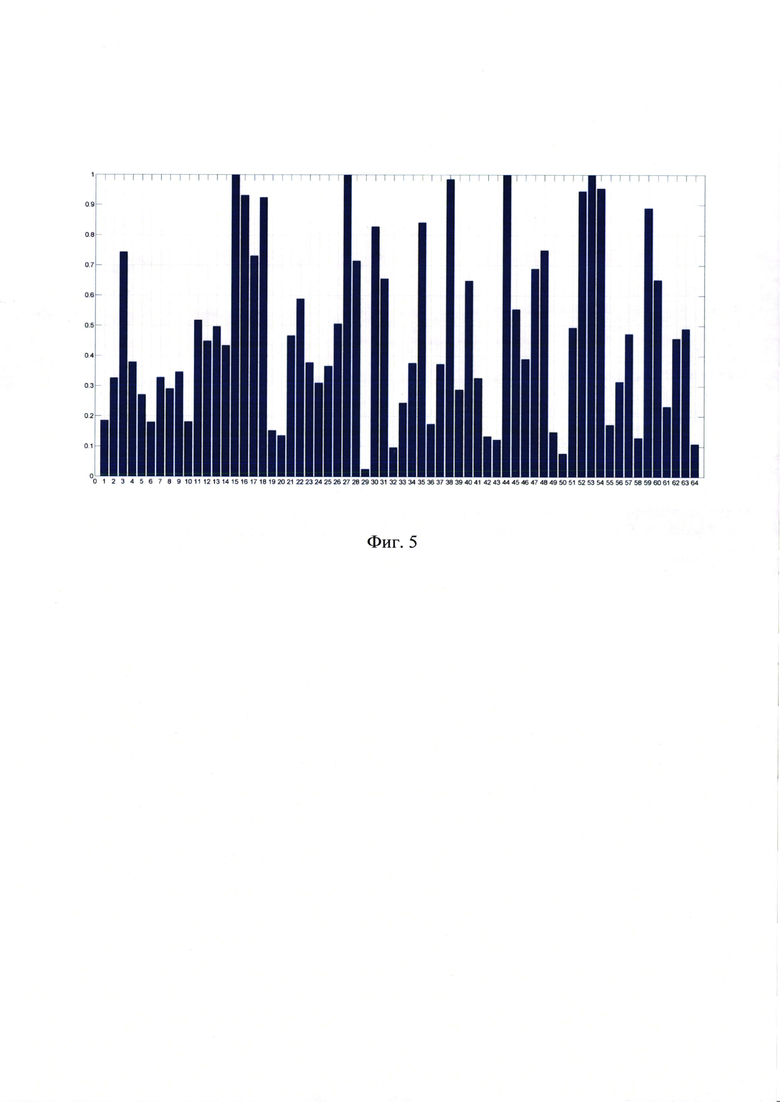
В случае использования поляриметрического признака селекции ложных воздушных целей в соответствии с изобретением, поимпульсная суммарная разность амплитуд сигналов от ложной воздушной цели типа MALD и реальной воздушной цели будут существенно отличаться. Так, на фиг. 4 представлены значения поимпульсной суммарной разности амплитуд сигналов с имитацией турбовинтового эффекта, переизлученных ложной воздушной целью типа MALD на четырех поляризациях (двух коллинеарных и двух ортогональных), математическое ожидание которых стремится к минимальному значению. На фиг. 5 представлены значения поимпульсной суммарной разности амплитуд сигналов, отраженных от реальной воздушной цели на четырех поляризациях (двух коллинеарных и двух ортогональных), математическое ожидание которых будет стремиться к максимальному значению. Таким образом, поляриметрическая селекция ложных воздушных целей возможна, а решение о ложной воздушной цели принимается на основе принижения среднего значения поимпульсной суммарной разности амплитуд сигналов от ложной воздушной цели типа MALD заранее установленного порогового значения.
Предлагаемое техническое решение практически применимо, так как для его реализации могут быть использованы элементы, широко распространенные в области электроники и электротехники.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОЛЯРИМЕТРИЧЕСКОЙ СЕЛЕКЦИИ ЛОЖНЫХ ВОЗДУШНЫХ ЦЕЛЕЙ | 2020 |
|
RU2769970C1 |
| СПОСОБ СЕЛЕКЦИИ ЛОЖНЫХ ВОЗДУШНЫХ ЦЕЛЕЙ | 2005 |
|
RU2280263C1 |
| Способ селекции имитаторов вторичного излучения воздушных объектов | 2020 |
|
RU2735289C1 |
| Способ селекции реальных воздушных объектов на фоне помех, формируемых имитаторами вторичного излучения, за счет использования мобильного радиолокатора | 2021 |
|
RU2787471C1 |
| Способ селекции имитаторов вторичного излучения воздушных объектов | 2018 |
|
RU2694276C1 |
| СПОСОБ РАСПОЗНАВАНИЯ ЛОЖНЫХ ВОЗДУШНЫХ ЦЕЛЕЙ ПРИ ДВУХПОЗИЦИОННОМ ЗОНДИРОВАНИИ | 2002 |
|
RU2225624C1 |
| Способ распознавания ложных (имитирующих) целей в многопозиционной радиолокационной станции с широкополосным зондирующим сигналом | 2020 |
|
RU2755993C1 |
| СПОСОБ РАСПОЗНАВАНИЯ ЛОЖНЫХ ВОЗДУШНЫХ ЦЕЛЕЙ | 2007 |
|
RU2348053C1 |
| СПОСОБ ВЫЯВЛЕНИЯ ПАРАМЕТРОВ ТРАЕКТОРНЫХ НЕСТАБИЛЬНОСТЕЙ МАЛОРАЗМЕРНОГО ВОЗДУШНОГО ОБЪЕКТА В ВИДЕ РАДИАЛЬНОГО УСКОРЕНИЯ ДВИЖЕНИЯ ДЛЯ РЕЖИМА СОПРОВОЖДЕНИЯ С ИСПОЛЬЗОВАНИЕМ СИГНАЛОВ С ПОИМПУЛЬСНОЙ ПЕРЕСТРОЙКОЙ НЕСУЩЕЙ ЧАСТОТЫ | 2009 |
|
RU2392640C1 |
| СПОСОБ СЕЛЕКЦИИ ДВИЖУЩИХСЯ ЦЕЛЕЙ В РЕЖИМЕ ПОИМПУЛЬСНОЙ ПЕРЕСТРОЙКИ НЕСУЩЕЙ ЧАСТОТЫ | 2009 |
|
RU2419107C1 |
Изобретение относится к радиолокации и может быть использовано для селекции ложных воздушных целей по поляризационным характеристикам отраженных сигналов. Достигаемый технический результат - повышение вероятности правильной селекции современных ложных воздушных целей типа MALD за счет использования поляризационного признака, неподдающегося имитации современными ложными целями типа MALD. Сущность изобретения заключается в том, что с помощью радиолокационной станции излучают в направлении каждой выбранной цели импульсные последовательности поочередно приемопередающими каналами с двумя активными фазированными антенными решетками с горизонтальной и вертикальной поляризациями электромагнитных волн, принимают отраженные от целей импульсные последовательности, амплитуды которых запоминают в оперативном запоминающем устройстве, и формируют из запомненных амплитуд генеральный массив данных, запоминание амплитуд отраженных от цели сигналов на четырех поляризациях (двух коллинеарных и двух ортогональных) осуществляют в соответствующем частном двумерном массиве данных, производят оценку поимпульсной суммарной разности амплитуд сигналов, рассчитывают среднее значение суммарно-разностных амплитуд поляризационной матрицы, определяют для цели среднее значение отраженного поляризационного сигнала в частном двумерном массиве данных, сравнивают величину с заранее установленным пороговым значением и в случае превышения пороговой величины принимают окончательное решение об отнесении цели к классу реальных целей, в противном случае принимают окончательное решение об отнесении цели к классу ложных воздушных целей. 5 ил.
Способ поляриметрической селекции ложных воздушных целей, заключающийся в том, что с помощью радиолокационной станции (РЛС) в течение интервала времени Δt излучают в направлении выбранной цели импульсные зондирующие сигналы, отличающийся тем, что в направлении каждой выбранной цели, в качестве импульсных зондирующих сигналов, излучают импульсные последовательности поочередно приемопередающими каналами с двумя активными фазированными антенными решетками (АФАР) с горизонтальной и вертикальной поляризациями электромагнитных волн (ЭМВ), принимают отраженные от цели импульсные последовательности, амплитуды которых запоминают в оперативном запоминающем устройстве, и формируют из запомненных амплитуд массив данных, ведут одновременное сопровождение М целей методом последовательного обращения лучей двух АФАР с вертикальной и горизонтальной поляризациями ЭМВ к 1-й, 2-й, …, m-й, … и М-й цели, так что длительность одного цикла обращения к М целям составляет M×Δt, для полученного в течение интервала Δt целого числа K'N - частотных импульсных последовательностей вычисляют максимально возможный период повторения импульсов в РЛС Ти макс = 0,5(Δt/N), находят число импульсных последовательностей K'=2(ƒ*(Tи макс/Tи мин)), запоминание амплитуд отраженных от m-й цели сигналов на четырех поляризациях (двух коллинеарных и двух ортогональных) осуществляют в соответствующем m-м частном двумерном массиве данных Wm, размером N×K', из частных массивов Wm для отдельных m-х целей формируют генеральный массив W, содержащий информацию об отраженных сигналах всех М целей, сопровождаемых РЛС, при этом определяют оценки поимпульсной суммарной разности амплитуд сигналов, отраженных от m-й цели на четырех поляризациях - двух коллинеарных и двух ортогональных, производят вычисления по формуле
где  - амплитуда n-го импульса, полученная при излучении в направлении выбранной m-й цели последовательности радиоимпульсов каналом с АФАР с горизонтальной поляризацией ЭМВ и приеме отраженной последовательности радиоимпульсов от m-й цели каналом с АФАР с горизонтальной поляризацией ЭМВ,
- амплитуда n-го импульса, полученная при излучении в направлении выбранной m-й цели последовательности радиоимпульсов каналом с АФАР с горизонтальной поляризацией ЭМВ и приеме отраженной последовательности радиоимпульсов от m-й цели каналом с АФАР с горизонтальной поляризацией ЭМВ,  - амплитуда n-го импульса, полученная при излучении в направлении выбранной m-й цели последовательности радиоимпульсов каналом с АФАР с вертикальной поляризацией ЭМВ и приеме отраженной последовательности радиоимпульсов от m-й цели каналом с АФАР с горизонтальной поляризацией ЭМВ,
- амплитуда n-го импульса, полученная при излучении в направлении выбранной m-й цели последовательности радиоимпульсов каналом с АФАР с вертикальной поляризацией ЭМВ и приеме отраженной последовательности радиоимпульсов от m-й цели каналом с АФАР с горизонтальной поляризацией ЭМВ,  - амплитуда n-го импульса, полученная при излучении в направлении выбранной m-й цели последовательности радиоимпульсов каналом с АФАР с горизонтальной поляризацией ЭМВ и приеме отраженной последовательности радиоимпульсов от m-й цели каналом с АФАР с вертикальной поляризацией ЭМВ,
- амплитуда n-го импульса, полученная при излучении в направлении выбранной m-й цели последовательности радиоимпульсов каналом с АФАР с горизонтальной поляризацией ЭМВ и приеме отраженной последовательности радиоимпульсов от m-й цели каналом с АФАР с вертикальной поляризацией ЭМВ,  - амплитуда n-го импульса, полученная при излучении в направлении выбранной m-й цели последовательности радиоимпульсов каналом с АФАР с вертикальной поляризацией ЭМВ и приеме отраженной последовательности радиоимпульсов от m-й цели каналом с АФАР с вертикальной поляризацией ЭМВ, рассчитывают средние значения суммарно-разностных амплитуд поляризационной матрицы, для чего определяют для m-й цели среднее значение отраженного поляризационного сигнала в пределах частного массива Wm по формуле
- амплитуда n-го импульса, полученная при излучении в направлении выбранной m-й цели последовательности радиоимпульсов каналом с АФАР с вертикальной поляризацией ЭМВ и приеме отраженной последовательности радиоимпульсов от m-й цели каналом с АФАР с вертикальной поляризацией ЭМВ, рассчитывают средние значения суммарно-разностных амплитуд поляризационной матрицы, для чего определяют для m-й цели среднее значение отраженного поляризационного сигнала в пределах частного массива Wm по формуле
принимают значение σm за оценку средней суммарно-разностной амплитуды m-й цели, сравнивают величину σm с заранее установленным пороговым значением σпор и в случае превышения пороговой величины принимают окончательное решение об отнесении m-й цели к классу реальных целей, в противном случае принимают окончательное решение об отнесении m-й цели к классу ложных воздушных целей.
| СПОСОБ СЕЛЕКЦИИ ЛОЖНЫХ ВОЗДУШНЫХ ЦЕЛЕЙ | 2005 |
|
RU2280263C1 |
| RU 1844465 U1, 26.10.2018 | |||
| СПОСОБ СЕЛЕКЦИИ РАДИОЛОКАЦИОННОЙ ЦЕЛИ С ИЗВЕСТНЫМИ ПОЛЯРИЗАЦИОННЫМИ ПАРАМЕТРАМИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2003 |
|
RU2256194C2 |
| CN 106338715 A, 18.01.2017 | |||
| US 20160061948 A1, 03.03.2016 | |||
| WO 2006133268 A2, 14.12.2006. | |||

