Изобретение относится к методам обработки радиолокационных сигналов и может быть использовано в многопозиционных радиолокационных станциях в целях автоматического распознавания ложных воздушных целей (ЛВЦ) на фоне реальных, при использовании в качестве зондирующих широкополосных сигналов, обеспечивающих высокое разрешение по дальности.
Известен способ селекции истинных воздушных целей (ВЦ) на фоне ложных [2] по характеру изменения их эффективной площади рассеяния (ЭПР). Он основан на измерении ЭПР объекта [3]. Суть способа заключается в том, что излучают зондирующие сигналы в направлении сопровождаемой ВЦ, по мере отражения от него запоминают в течение некоторого времени Δt амплитуды отраженных сигналов. По запомненным амплитудам отраженных сигналов формируют диаграмму обратного вторичного излучения (ДОВИ) ВЦ [1-6]. Затем анализируют сформированную ДОВИ ВЦ. При этом задаются определенной величиной изменения уровня отраженного сигнала от ВЦ ΔU и измеряют величину изменения ракурса локации ВЦ Δγ, приводящего к заданному изменению амплитуды отраженного сигнала ΔU. Далее сравнивают измеренную величину Δγ изменения ракурса локации с заранее установленным пороговым значением Δγпор. В случае превышения порога принимают решение о том, что объектом отражения радиоволн является ЛВЦ.
Недостатком данного способа является то, что он эффективен только в отношении ЛВЦ старого парка, оснащенных уголковыми отражателями, линзами Люнеберга и т.п. В отношении современных ЛВЦ типа MALD, способных имитировать изрезанность ДОВИ путем переизлучения зондирующего сигнала РЛС в виде ретрансляционной помехи с разной амплитудой от зондирования к зондированию [7-9], данный способ будет не эффективен.
Известен и другой способ селекции ЛВЦ на фоне реальных [10], который использует признак, не поддающийся имитации современными ЛЦ и являющийся работоспособным в условиях применения любых типов ЛЦ, включая современные имитаторы типа MALD. Способ предполагает одновременное сопровождение выбранной ВЦ двумя синхронизированными по времени и разнесенными на местности на расстояние d РЛС. Это расстояние d должно быть таким, чтобы на основной дальности сопровождения цели разность углов локации цели для РЛС1 и РЛС2 составляла единицы градусов. Обе РЛС излучают импульсные зондирующие сигналы с одинаковым периодом повторения Tи в направлении цели. В каждой из двух РЛС в течение некоторого времени Δt в оперативных запоминающих устройствах (ОЗУ) цифровых вычислительных машин (ЦВМ) запоминают амплитуды отраженных от цели сигналов и точное время прихода каждого из них.
Из запомненных амплитуд и значений времени прихода каждого импульса в РЛС1 формируют двумерный массив данных M1, а в РЛС2 - двумерный массив данных М2. Эти массивы выражают собой диаграммы обратного рассеяния цели, полученные на интервале времени Δt, соответствующем изменению ракурса локации цели на Δγ.
На первом этапе распознавания используют данные массива M1, сформированного в РЛС1, и предложенный в [2] признак. Это позволяет на основе известного способа селектировать ЛЦ типа уголковых отражателей. Для этого по отраженным от цели сигналам в основной РЛС 1 известными методами [6] определяют угол места цели, азимут цели, скорость цели Vц и наклонную дальность до цели r, пространственный ракурс сопровождения цели и скорость изменения ракурса локации цели  [11]:
[11]:
 .
.
Задают определенный уровень изменения амплитуды отраженного сигнала ΔU, анализируют сформированный двумерный массив данных M1 и находят интервал времени ΔtΔU, в течение которого амплитуда отраженного сигнала изменяется на величину ΔU. Для этого из массива M1 выбирают элемент с номером n, соответствующий максимальному значению амплитуды отраженного сигнала Un. Номер элемента n принимают за начало отсчета. Последовательно номер элемента изменяют на единицу и находят номер k такого элемента массива, в котором записана амплитуда отраженного сигнала Uk, отличающаяся от амплитуды Un на величину ΔU. Далее находят интервал времени, соответствующий изменению амплитуды отраженного сигнала на величину ΔU:
 .
.
Вычисляют величину изменения ракурса локации цели Δγ, приводящую к изменению амплитуды отраженного сигнала на ΔU:
 .
.
Вычисленную величину изменения ракурса локации Δγ сравнивают с пороговым значением Δγпор., и в случае превышения величиной Δγ порогового значения сразу принимают окончательное решение о наличии ЛЦ.
В противном случае на втором этапе распознавания используют двумерные массивы данных M1 и М2, полученные соответственно в РЛС1 и РЛС2. Для выявления идентичности либо несоответствия массивов M1 и М2 производят их сравнение. Если ДОВИ в обеих РЛС будут сформированы имитирующим сигналом ЛЦ типа MALD, то они будут идентичными. Массивы данных M1 и М2, сформированные в РЛС1 и РЛС2 от реальной цели, должны отличаться. Для сравнения двумерных массивов M1 и М2 оцифрованные данные (массив М2) передают по средствам связи в РЛС1. ЦВМ РЛС1 производит поимпульсное сравнение амплитуд отраженных сигналов, для этого из массива M1 берут первый элемент U1M1, а из массива М2 – первый элемент U1M2. Их значения сравнивают и вычисляют модуль разности: |U1M1- U1M2|. Затем из массивов M1 и М2 берут вторые элементы и вычисляют аналогичную разность |U1M1- U1M2|. Данную операцию повторяют до окончания перебора всех элементов массивов. Правильное соответствие амплитуд отраженных сигналов по времени обеспечивают синхронизацией РЛС1 и РЛС2, а также записью в массивы совместно с амплитудой n-го сигнала точного времени его прихода. Полученные модули разностей складывают. В результате производится вычисление величины несоответствия ДОР РЛС1 и РЛС2:
 ,
,
где N - количество сравниваемых элементов.
Полученное значение ΔU∑ сравнивают с пороговой величиной ΔUпор. В случае превышения величиной ΔU∑ порога принимают окончательное решение о наличии реальной ВЦ. В противном случае принимают окончательное решение о наличии ЛЦ.
Недостатком данного способа является то, что для селекции современных ЛЦ типа MALD необходимо привлечение двух РЛС. При этом одновременно может производиться распознавание только одной цели, что противоречит современной концепции построения многоканальных радиолокационных комплексов, способных сопровождать несколько целей одновременно. Время накопления отраженных сигналов для принятия решения о типе цели зависит от дальности до нее, поскольку требуемое изменение ракурса локации при увеличении расстояния до ВЦ будет происходить за больший промежуток времени. Таким образом, применение способа распознавания в ряде случаев оказывается труднореализуемым и нецелесообразным [12].
Известен способ селекции имитаторов вторичного излучения [13], заключающийся в том, что две синхронизированные по времени радиолокационные станции РЛС1 и РЛС2 одновременно облучают выбранную для распознавания ВЦ импульсными высокочастотными сигналами сантиметрового диапазона. Для развязки излучений несущие частоты основной РЛС1 и дополнительной РЛС2 должны отличаться на величину порядка 70 кГц. Указанные РЛС предлагается размещать на расстоянии d, не превышающем 2 км в направлении перпендикулярном основному направлению ожидаемого подлета ВЦ или имитатора вторичного излучения (ИВИ).
Периоды повторения Ти импульсов РЛС1 и РЛС2 выбирают одинаковыми. В процессе автоматического сопровождения обеими РЛС ВЦ определяют значения угловых координат и дальности в каждый момент времени, отраженные от него сигналы после приема переводятся с помощью аналого-цифрового преобразователя (АЦП) в цифровую форму и запоминаются в оперативных запоминающих устройствах (ОЗУ) соответствующих РЛС. Запоминанию подлежат амплитуда и точное время приема каждого отраженного импульса. Для запоминания точного времени приема n-го импульсного сигнала используют формулу tn=nTи, где n - номер отраженного импульса. Запоминание проводится в течение временного интервала Δt, одинакового для обоих РЛС. Выбор временного интервала Δt проводят с учетом реальных значений полупериодов рысканий ВЦ при ее полете в турбулентной атмосфере [14]. Он должен быть не менее 4 секунд.
Из запомненных амплитуд и значений времени приема каждого импульса в ОЗУ РЛС1 создается двумерный массив данных M1, а в ОЗУ РЛС2 - двумерный массив данных М2. Каждый из этих массивов будет выражать собой ДОВИ ВЦ.
Для устранения составляющих, связанных с проявлениями турбовинтового эффекта (ТВЭ), проводится сглаживание (низкочастотную фильтрацию) значений амплитуд отраженных сигналов, записанных в массивы M1, М2.
Для проведения дальнейших операций число элементов массивов M1 и М2 уменьшают на 1, удаляя последние элементы.
На первом этапе селекции используются данные массива M1, сформированного в РЛС1, и предложенный в [2] признак. Это позволяет на основе известного способа селектировать ЛВЦ типа уголковых отражателей, фольги, линз Люнеберга и им подобных на фоне реальных ВЦ.
Задавшись определенным уровнем изменения амплитуды отраженного сигнала ΔU, анализируют сформированный двумерный массив данных M1 и находят интервал времени ΔtΔU [10], в течение которого амплитуда отраженного сигнала изменяется на величину ΔU.
Величину найденного интервала ΔtΔU сравнивают с пороговым значением Δtпор, учитывающим среднюю скорость изменения ракурса локации ВЦ при рысканиях, составляющую величину порядка 1,5%. В случае превышения величиной ΔtΔU порогового значения Δtпор сразу принимают окончательное решение о наличии ЛВЦ. В этом случае дальнейшая селекция не требуется.
Однако ЛВЦ может оказаться имитатором типа MALD [8]. Тогда отраженные сигналы будут интенсивно изменять свою амплитуду за малый интервал времени Δt, имитируя ДОВИ реальной ВЦ. В этом случае на первом этапе селекции будет принято предварительное решение о возможном наличии реальной ВЦ.
Для принятия окончательного решения о наличии реальной ВЦ на втором этапе производят поимпульсное сравнение массивов данных M1 и М2, полученных соответственно в РЛС1 и РЛС2.
Из массива M1 извлекается первый элемент Ucp1M1, а из массива М2 - первый элемент Uср1M2. Их значения сравниваются, и вычисляется модуль разности |Ucp1M1 - Ucp1M2|. Затем из массивов M1 и М2 извлекаются вторые элементы и вычисляется аналогичная разность |Ucp2M1 - Ucp2M2|. Данная операция повторяется до окончания перебора всех элементов массива. На s-oм шаге будет вычисляться величина |UcpsM1 - UcpsM2|. Если число элементов сглаженного массива обозначить через S, то последняя разность модулей выражается формулой |UcpSM1 - UcpSM2|. Из алгоритма усреднения ясно, что число элементов сглаженного массива S=N-1. Правильное соответствие амплитуд отраженных сигналов по времени обеспечивается синхронизацией РЛС1 и РЛС2, а также записью в массивы совместно с амплитудой каждого сигнала точного времени его прихода. Рассчитанные модули разностей складываются. В результате производится вычисление величины несоответствия ДОВИ ВЦ РЛС1 и РЛС2:
 ,
,
где S - количество элементов в сглаженном массиве M1 (количество элементов в массивах M1 и М2 одинаково, т.к. одинаковыми являются период записи сигналов Δt и период повторения Ти).
Полученное значение ΔUΣ сравнивают с пороговой величиной ΔUпор. В случае превышения величиной ΔUΣ величины порога ΔUпор принимают окончательное решение о наличии реальной ВЦ. В противном случае - ЛВЦ.
Недостатками способа является большое время записи сигналов - Δt, а также то, что он неработоспособен для вариантов ЛВЦ, формирующих разные ОХ на разных частотах. Кроме того, способ не учитывает возможное отличие коэффициентов усиления приемных каналов РЛС1 и РЛС2, которое может привести к значительному расхождению значений элементов массивов M1 и М2 после устранения составляющих ТВЭ методом сглаживания.
Еще одним недостатком данного способа является то, что при различии коэффициентов усиления приемных каналов РЛС1 и РЛС2 становится невозможным осуществлять корректное поимпульсное сравнение амплитуд отраженных сигналов в ЦВМ. Сравнение приводит к правильному выводу только в том случае, когда коэффициенты усиления приемных каналов РЛС1 и РЛС2 строго идентичны [15].
Известен и другой способ селекции [15], который является развитием известного способа селекции ЛВЦ [13] для придания ему работоспособности в отношении целей, имитирующих радиолокационные характеристики реальных ВЦ, облучаемых сигналами РЛС с разными несущими частотами.
Для решения задачи предлагается изменить алгоритм формирования ДОВИ, а также их количество. Две ДОВИ на частотах f1 и f2 предлагается формировать с одного ракурса, а третью ДОВИ на частоте f1 - с другого ракурса. ДОВИ, формируемые совместно на разных несущих частотах и при различных параметрах локации (на разных ракурсах), обеспечивают однозначное определение факта имитации радиолокационных характеристик и признаков ВЦ сложной пространственной конфигурации.
Суть предлагаемого способа селекции ЛВЦ заключается в следующем. Предлагается использовать активную РЛС и пассивный приемный модуль (ППМ), включающий антенную систему, приемную систему, настроенную на частоту f1 и задерживающую (блокирующую) радиоимпульсы на частоте f2, систему управления антенной, ОЗУ, АЦП, средства связи для приема и передачи информации на радиолокационную станцию. Главное отличие ППМ от РЛС заключается в отсутствии передатчика. Основная РЛС осуществляет поиск ВЦ и взятие ее на сопровождение, проводит ее отождествление на основе измеренных координат и скорости движения, используя зондирующие сигналы, определяющие ее основные технические характеристики и параметры движения. После принятия оператором решения на селекцию ЛВЦ по соответствующей команде (сигналу) РЛС начинает излучать специальный двухчастотный сигнал, представляющий собой последовательность радиоимпульсов, в котором несущие частоты в смежных радиоимпульсах отличаются на величину Δf=f1-f2, где f1 и f2 - несущие частоты смежных радиоимпульсов в последовательности. Экспериментально установлено, что разность частот Δf должна составлять не менее 100 МГц. Для осуществления селекции ЛВЦ на расстоянии до ВО 100 км радиолокационную станцию и ППМ необходимо удалять друг от друга на расстояние не менее 600 м в направлении перпендикулярном основному направлению ожидаемого подлета ВЦ. С увеличением (уменьшением) предполагаемого расстояния до ВЦ взаимное расположение РЛС и ППМ, выбираемое заблаговременно, целесообразно увеличивать (уменьшать).
Для обнаружения селектируемой ВЦ пассивным приемным модулем и слежения за этой ВЦ ее координаты, измеренные с помощью РЛС, по средствам связи передают из РЛС в ППМ. Пассивный приемный модуль принимает отраженные от ВЦ на частоте f1 сигналы и осуществляет ее пассивное сопровождение по угловым координатам и дальности. В связи с незначительным удалением ППМ от РЛС пересчет координат ВЦ не требуется. Отраженные от ВЦ сигналы на частоте f2 не проходят через частотно-избирательные цепи ППМ. Селекция осуществляется путем сравнения, во-первых, ДОВИ ВЦ в РЛС на частотах f1 и f2, а во-вторых, путем сравнения ДОВИ ВЦ, сформированные в РЛС и в ППМ на частоте f1.
Селекция основана на проверке выполнения определенных условий. Решение о наличии ЛВЦ принимается в случае, если ДОВИ на частотах f1 и f2 будут одинаковыми, что означает или наличие в составе ВЦ всего одного локального РЦ или попытку имитации ВЦ сложной пространственной конфигурации (СПК). То есть и в том и другом случае ДОВИ будут сформированы искусственным путем, а не в результате интерференции радиоволн, отраженных от планера ВЦ, имеющей несколько пространственно-распределенных РЦ. При отражении от ВЦ СПК вследствие разной длины волны зондирующего сигнала на частотах f1 и f2 интерференционное суммирование (суперпозиция) отражений от планера ВЦ должно приводить к формированию несовпадающих, т.е. разных ДОВИ.
При отличиях ДОВИ на частотах f1 и f2, полученных синхронно в одной РЛС, для выработки верного обоснованного решения на втором этапе сравниваются ДОВИ, сформированные в РЛС и ППМ на частоте f1. В результате принимается решение о наличии ЛВЦ, если ДОВИ, зафиксированные в РЛС и ППМ являются идентичными. Отражательные характеристики ВЦ СПК, сформированные на одинаковой частоте, но с разных ракурсов, не могут совпадать.
Недостатком способа является существенная зависимость от курсового угла (угол между проекцией вектора скорости цели на горизонтальную плоскость и линией визирования), дальности и времени накопления, отраженных от цели сигналов, для принятия классификационного решения.
Таким образом, рассмотренные способы распознавания ЛЦ обладают рядом существенных недостатков и ограничений, что затрудняет их реализацию в конкретных образцах военной техники, кроме того они ориентированы на внедрение в обзорные РЛС, в которых используются узкополосные зондирующие сигналы.
Целью предлагаемого изобретения является повышение качества распознавания движущихся ложных (имитирующих) целей при малых курсовых углах и ограниченном времени принятия классификационных решений в малобазовых радиолокационных системах.
Достижение поставленной цели обеспечивается за счет совместной корреляционной обработки радиолокационных дальностных портретов, полученных от пары синхронизированных широкополосных радиолокационных станций и статистического усреднения коэффициентов корреляции для получения достаточной статистики.
Изобретение предполагает внедрение в малобазовую многопозиционную радиолокационную систему средней дальности с широкополосным зондирующим сигналом и с фазированной антенной решеткой.
В качестве многопозиционной радиолокационной системы рассматриваются две РЛС (одна из которых работает только на прием) либо РЛС с выносным приемным пунктом (ВПП). РЛС синхронизированы по времени излучения, угловым координатам и расположены на расстоянии обеспечивающем стабильную цифровую радиосвязь.
РЛС1 и РЛС2 (ВПП) принимают отраженные от ВЦ сигналы в течение K периодов зондирования и производят их первичную согласованную обработку в окне сопровождения, детектирование и аналого-цифровое преобразование. РЛС2 (ВПП) передает по радиоканалу в РЛС1 сигнал в виде K цифровых массивов радиолокационных дальностных портретов (РЛДП). В РЛС1 по коэффициенту корреляции сравнивают последовательности цифровых массивов РЛДП, сформированные обеими РЛС. Для этого находят нормированные максимумы сверток k-х пар РЛДП РЛС1 и 2 в соответствии с выражением [16]:


где s=1..(2H–1), k=1..K, x1h,k и x2h,k – массивы данных РЛДП РЛС1 и РЛС2 (ВПП) k–го зондирования, H – размерность вектора сигнала после АЦП.
Полученный числовой вектор R коэффициентов корреляции отражает степень статистической похожести исходных пар РЛДП и является набором исходных данных для формирования статистики, позволяющей селектировать истинные и ложные цели. Достаточной статистикой для принятия классификационного решения выбран коэффициент вариации ν от вектора R, который вычисляется по формуле [17]:

где:
 – оценка среднеквадратического отклонения (СКО),
– оценка среднеквадратического отклонения (СКО),
 – оценка математического ожидания коэффициентов корреляции пар РЛДП.
– оценка математического ожидания коэффициентов корреляции пар РЛДП.
Полученный коэффициент вариации ν сравнивают с пороговым значением  пор.. В случае превышения величиной порогового значения пор., принимают решение о том, что ВЦ является реальной, в противном случае – ложная.
пор.. В случае превышения величиной порогового значения пор., принимают решение о том, что ВЦ является реальной, в противном случае – ложная.
При выборе величины порогового значения пор учитываются уровень собственных шумов и помех в приемных трактах РЛС. Согласно предварительным расчетам величину порогового значения пор. следует выбирать в пределах от 0,001 до 0,01.
Возможность использования коэффициента корреляции пар РЛДП, полученных с разных направлений для селекции ЛВЦ, обусловлена зависимостью РЛДП от их ракурса по отношению к точке приема отраженного сигнала. Зависимость РЛДП реальной цели от ракурса является следствием, того что при высоком разрешении по дальности (единицы метров) она, является пространственно-распределенным источником вторичного излучения.
ЛВЦ типа MALD в пределах ширины главного лепестка диаграммы направленности своей передающей антенны может считаться точечным источником амплитудно-модулированного сигнала. Поэтому сигналы, принятые разнесенными РЛС остаются коррелированными. При этом незначительные флюктуации коэффициента корреляции РЛДП вызваны неоднородностями среды распространения радиоволн, наличием собственных шумов и помех приемных трактов РЛС.
При зондировании реальной движущейся цели коэффициент корреляции РЛДП будет меняться, что обуславливает необходимость накопления статистики.
Для проверки работоспособности способа распознавания ложных (имитирующих) целей было проведено математическое моделирование в среде Matlab согласно схеме (Фиг.1).
Моделируемая математическая модель состоит из трех РЛС, синхронизированных и расположенных на одной линии на расстоянии 100 м и 3500 м друг от друга. При этом РЛС1 работает в активно-пассивном режиме, РЛС2 и РЛС3 в пассивном.
В качестве исходных данных принято:
1. ВЦ, в начальный момент времени, находится на дальностях 65000 м, 65000,1 м, 65094,2 м с курсовыми углами 10°, 10,0881° и 13,0822° для РЛС1,2 и 3 соответственно.
2. ВЦ движется равномерно и прямолинейно с постоянной скоростью 370 м/с полета на высоте 5000 м.
3. Величина порога пор = 0,01.
4. Зондирующий сигнал: последовательность прямоугольных радиоимпульсов длительностью 8 нс, периодом следования 100 мс, количеством импульсов равным 30 и несущей частотой 10 ГГц.
В процессе движения цели меняется дальность до РЛС1, 2 и 3, а также курсовой угол РЛС1, 2 и 3 (угол θ1, θ2 и θ3), азимут и угол места. Высота остается постоянной.
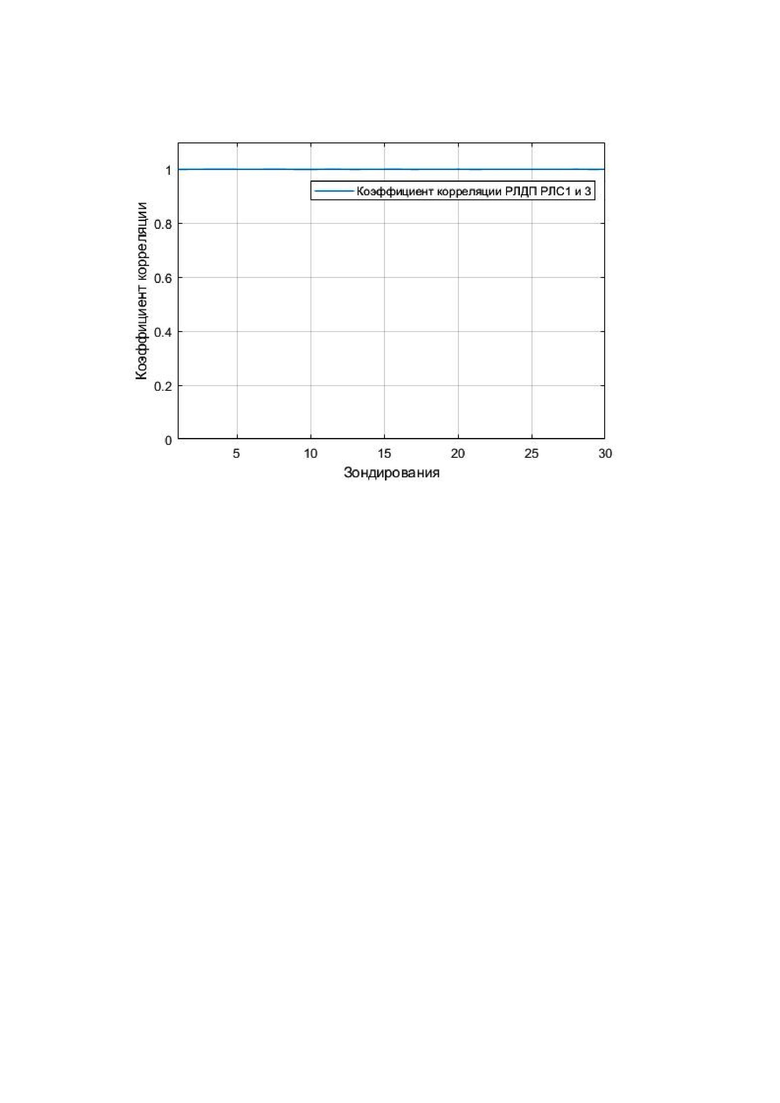
Коэффициенты корреляции РЛДП получены от РЛС1 и 2, РЛС1 и 3, для варианта, когда ВЦ – реальная (многоцелевой истребитель Су-27).
РЛДП реальной ВЦ РЛС1,2 и 3 были получены с помощью программы для моделирования радиолокационных сигналов, отраженных от объектов произвольной пространственной конфигурации, двигающихся прямолинейно и равномерно с атакующих ракурсов [19].
Коэффициенты R РЛДП получены от РЛС1 и 2, РЛС1 и 3, для варианта, когда ВЦ – ложная (имитатор) типа MALD.
РЛДП ложной (имитирующей) цели типа MALD были получены с помощью программы для моделирования радиолокационных сигналов, формируемых ложными (имитирующими) целями [20].
Статистические показатели коэффициентов корреляции РЛДП РЛС1, 2 и РЛС1, 3 представлены в таблице 1.
Анализ полученных значений величины ν для реальной цели (равной 0,1626 и 0,2608) и для ложной (имитирующей) цели (0,00013 и 0,00013) при пороговом значении ν пор.=0,01, подтверждает работоспособность способа.
Таким образом, предлагаемый способ распознавания ЛВЦ, имеет ряд преимуществ по сравнению с прототипом [15], что позволяет распознавать ВЦ, имитирующие сигнал от пространственно-распределенных целей, двигающихся с малыми изменениями курсового угла. Способ остается работоспособен даже при малых значениях базы, а также не требует сопровождения ВЦ в течение длительного промежутка времени и периодов записи сигналов Δt.
Способ легко реализуется с помощью стандартных математических операции в сигнальных процессорах, и может быть рекомендован для внедрения в существующие и перспективные многопозиционные системы сопровождения Х диапазона с широкополосным зондирующим сигналом, для повышения их информационных характеристик.
ИСТОЧНИКИ ИНФОРМАЦИИ
1. Радиолокационные характеристики летательных аппаратов / Под ред. Л.Т. Тучкова. М.: Радио и связь, 1985. 236 с.
2. Небабин В.Г., Сергеев В.В. Методы и техника радиолокационного распознавания. М.: Радио и связь, 1984. с. 96-99 (аналог).
3. Финкельштейн М.И. Основы радиолокации. Учебник для вузов. М.: Сов. радио,1973. 496 с.
1. Радиоэлектронные системы. Справочник. Основы построения и теория. Под ред. Я.Д. Ширмана. М.: Радиотехника. 2007. 510 с.
2. Справочник по радиолокации / Под ред. М. Сколника. Том 1. Основы радиолокации. Под ред. Я.С. Ицхоки. М.: Сов. радио, 1976. 456 с.
3. Теоретические основы радиолокации / Под ред. Я.Д. Ширмана. М.: Сов. радио, 1970. 560 с.
4. Афинов В. Американский имитатор воздушной цели MALD // Зарубежное военное обозрение, 1998. №5. с. 32.
5. Афинов В. Тенденции развития средств РЭБ авиации Вооруженных сил США на пороге XXI века // Зарубежное военное обозрение, 1998. №6. С. 28-35.
6. Афинов В. Новое направление развития западных средств РЭП индивидуальной защиты самолетов // Зарубежное военное обозрение. 1999. №8. С. 39-42.
7. Патент РФ №2225624 от 10.03.2004 г. Способ распознавания ложных воздушных целей при двухпозиционном зондировании. Митрофанов Д.Г., Бортовик В.В., Николаев А.В., Сафонов А.В. и др. Заявка №2002121150. Приоритет 09.08.2002 г. (прототип).
8. Стайнберг Б.Д. Формирование радиолокационного изображения самолета в диапазоне СВЧ // ТИИЭР. 1988. №12, т. с.26-46.
9. Патент РФ №2280263 от 20.06.2006 г. G01S 13/52. Способ селекции ложных воздушных целей. Митрофанов Д.Г., Прохоркин А.Г., Оверченко А.Г. и др. Заявка №2005102388/09 от 31.01.2005.
10. Патент РФ №2348053 от 27.02.2009 г. G01S 13/02. Способ распознавания ложных воздушных целей. Митрофанов Д.Г., Бортовик В.В., Сафонов А.В., Силаев Н.В. и др. Заявка №2007138527 от 16.10.2007. БИ №6. (прототип).
11. Доброленский Ю.П. Динамика полета в неспокойной атмосфере. М.: Машиностроение, 1969. 256 с.
12. Патент РФ №2694276 от 11.07.2019 г. G01S 7/292. Способ селекции имитаторов вторичного излучения воздушных объектов. Митрофанов Д.Г., Бортовик В.В., Жбанов И.Л., Силаев Н.В. и др. Заявка №2018142360 от 29.11.2018. БИ №20.
Напалков В.В.13. Уравнения свертки в многомерных пространствах. – М., Наука, 1982. – Тираж 3500 экз. – 240 с.
14. Елисеева И.И., Юзбашев М.М. Общая теория статистики: Учебник / Под ред. Елисеевой. – 5-е изд., перераб. и доп. –М.: Финансы и статистика, 2004. – 656 с.:ил.
15. Васин В.В., Власов О.В. и др. Радиолокационные устройства (теория и принципы построения), М., «Советское радио», 1970. – 680 с.
16. Свидетельство о государственной регистрации программы для ЭВМ №2020610183 от 10.01.2020 г. Программа для моделирования радиолокационных сигналов, отраженных от объектов произвольной пространственной конфигурации, двигающихся равномерно и прямолинейно с атакующих ракурсов. Мамедов В.А., Комонов В.С., Сисигин И.В. и др. Заявка №2019667368 от 23.12.2019.
17. Свидетельство о государственной регистрации программы для ЭВМ №2020612829 от 03.03.2020 г. Программа для моделирования радиолокационных сигналов, формируемых ложными (имитирующими) целями. Мамедов В.А., Комонов В.С., Сисигин И.В. и др. Заявка №2020611761/69 от 14.02.2020.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РАСПОЗНАВАНИЯ ЛОЖНЫХ ВОЗДУШНЫХ ЦЕЛЕЙ ПРИ ДВУХПОЗИЦИОННОМ ЗОНДИРОВАНИИ | 2002 |
|
RU2225624C1 |
| Способ селекции имитаторов вторичного излучения воздушных объектов | 2018 |
|
RU2694276C1 |
| СПОСОБ РАСПОЗНАВАНИЯ ЛОЖНЫХ ВОЗДУШНЫХ ЦЕЛЕЙ | 2007 |
|
RU2348053C1 |
| Способ селекции реальных воздушных объектов на фоне помех, формируемых имитаторами вторичного излучения, за счет использования мобильного радиолокатора | 2021 |
|
RU2787471C1 |
| СПОСОБ СЕЛЕКЦИИ ЛОЖНЫХ ВОЗДУШНЫХ ЦЕЛЕЙ | 2005 |
|
RU2280263C1 |
| Способ селекции имитаторов вторичного излучения воздушных объектов | 2020 |
|
RU2735289C1 |
| СПОСОБ РАДИОЛОКАЦИОННОГО РАСПОЗНАВАНИЯ ГРУППЫ ОДНОТИПНЫХ МАЛОРАЗМЕРНЫХ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2021 |
|
RU2787843C1 |
| Способ опознавания целей (варианты) | 2016 |
|
RU2622888C1 |
| Способ идентификации радиолокационных целей (варианты) | 2016 |
|
RU2611720C1 |
| СПОСОБ ЭКСПЕРИМЕНТАЛЬНОЙ ПРОВЕРКИ ИНФОРМАЦИОННЫХ И ИДЕНТИФИКАЦИОННЫХ ВОЗМОЖНОСТЕЙ ДОПЛЕРОВСКИХ ПОРТРЕТОВ ВОЗДУШНЫХ ОБЪЕКТОВ | 2014 |
|
RU2571957C1 |
Изобретение относится к методам обработки радиолокационных сигналов и может быть использовано в многопозиционных радиолокационных станциях в целях автоматического распознавания ложных воздушных целей (ЛВЦ) на фоне реальных при использовании в качестве зондирующих широкополосных сигналов, обеспечивающих высокое разрешение по дальности. Техническим результатом изобретения является повышение качества распознавания движущихся ложных (имитирующих) целей при малых курсовых углах и ограниченном времени принятия классификационных решений в малобазовых радиолокационных системах. Достижение указанного результата обеспечивается за счет совместной корреляционной обработки радиолокационных дальностных портретов, полученных от пары синхронизированных широкополосных радиолокационных станций, и статистического усреднения коэффициентов корреляции для получения достаточной статистики. 1 ил., 1 табл.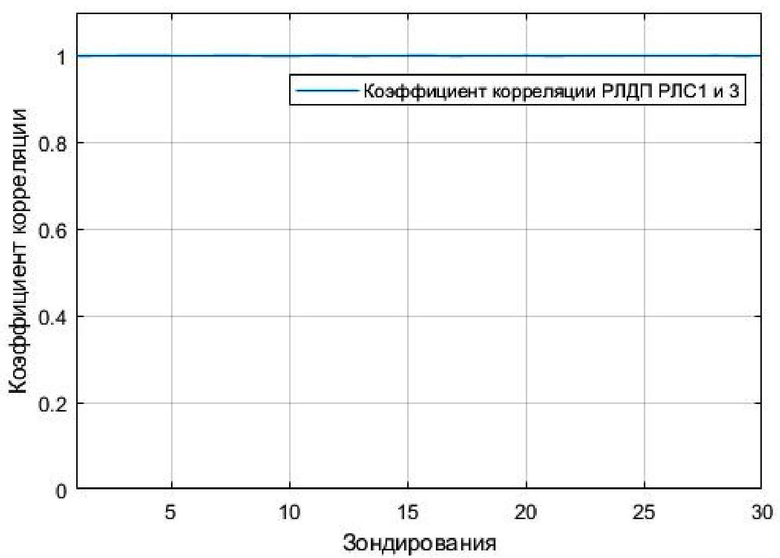
Способ распознавания ложных (имитирующих) целей, заключающийся в том, что две радиолокационные станции, синхронизированные по времени и угловым координатам (либо радиолокационная станция с выносным приемным пунктом), принимают отраженные от воздушной цели широкополосные сигналы в течение K периодов зондирования, производят формирование последовательности радиолокационных дальностных портретов путем согласованной обработки, детектирования и аналого-цифрового преобразования в окне сопровождения принятых сигналов, последовательности цифровых массивов радиолокационных дальностных портретов, полученных от обеих радиолокационных станций в один момент времени, попарно сравнивают с помощью коэффициента корреляции, принятие классификационного решения о принадлежности воздушной цели к классу ложных/реальных производят путем сравнения коэффициента вариации, вычисленного от K коэффициентов корреляции, с заранее установленным пороговым значением.
| СПОСОБ РАСПОЗНАВАНИЯ ЛОЖНЫХ ВОЗДУШНЫХ ЦЕЛЕЙ ПРИ ДВУХПОЗИЦИОННОМ ЗОНДИРОВАНИИ | 2002 |
|
RU2225624C1 |
| Способ селекции имитаторов вторичного излучения воздушных объектов | 2018 |
|
RU2694276C1 |
| Способ опознавания целей (варианты) | 2016 |
|
RU2622888C1 |
| СПОСОБ ИЗВЛЕЧЕНИЯ ИЗ ДОПЛЕРОВСКИХ ПОРТРЕТОВ ВОЗДУШНЫХ ОБЪЕКТОВ ПРИЗНАКОВ ИДЕНТИФИКАЦИИ С ИСПОЛЬЗОВАНИЕМ МЕТОДА СВЕРХРАЗРЕШЕНИЯ | 2015 |
|
RU2589737C1 |
| СПОСОБ ДВУХКАНАЛЬНОГО ОБНАРУЖЕНИЯ РАДИОЛОКАЦИОННЫХ СИГНАЛОВ СО СТАБИЛИЗАЦИЕЙ ВЕРОЯТНОСТИ ЛОЖНОЙ ТРЕВОГИ | 2015 |
|
RU2585257C1 |
| 0 |
|
SU193652A1 | |
| US 9134410 B2, 15.09.2015 | |||
| CN 104931939 A, 23.09.2015 | |||
| CN 103954943 A, 30.07.2014. | |||

