Изобретение относится к радиолокации и радионавигации и может быть использовано для селекции радиолокационных целей при управлении движением воздушного и морского транспорта на фоне мешающих отражений и помех.
Цель изобретения - повышение эффективности селекции цели с известными поляризационными параметрами.
Известен способ измерения поляризационных характеристик радиолокационной цели и устройство для его реализации: патент Российской федерации №1232034 A1, In.cl4 G 01 S 13/02, приоритет от 30.03.1993. Способ измерения поляризационных характеристик радиолокационной цели заключается в облучении цели сигналом, плоскость поляризации которого вращается с частотой Ω , приеме отраженного целью сигнала, поляризация которого совпадает с поляризацией излученного сигнала, а также измерении амплитуды спектральной составляющей принятого сигнала на частоте 2Ω , отличающийся тем, что, с целью расширения функциональных возможностей путем измерения дополнительных поляризационных параметров из принятого сигнала выделяют спектральную составляющую на частоте 4Ω , измеряют амплитуду спектральной составляющей принятого сигнала на частоте 4Ω , а также измеряют фазы спектральных составляющих на частотах 2Ω и 4Ω относительно удвоенного и учетверенного углового положения плоскости поляризации излучаемого сигнала соответственно с последующим измерением поляризационных параметров по формулам:
электрический фактор формы ρ =2· А2Ω ;
фазовый сдвиг, вносимый целью Δ ϕ =(2· А4Ω )0.42;
угол ориентации поляризационного базиса цели при 
угол ориентации поляризационного базиса цели при 
где А2Ω - амплитуда спектральной составляющей на частоте 2Ω (в децибелах);
где А4Ω - амплитуда спектральной составляющей на частоте 4Ω (в децибелах);
где ϕ 2Ω - фаза спектральной составляющей на частоте 2Ω (в радианах);
где ϕ 4Ω - фаза спектральной составляющей на частоте 4Ω (в радианах).
Устройство для измерения поляризационных характеристик радиолокационных целей включает последовательно соединенные передатчик, антенный переключатель, вращающуюся секцию круглого волновода со встроенной фазовой пластинкой и антенну, а также блок управления, последовательно соединенные приемник, блок стробирования и пиковый детектор, причем вход приемника подключен ко второму выходу антенного переключателя, исполнительный механизм, первый выход которого с помощью механической передачи связан с вращающейся секцией круглого волновода, выход блока управления подключен к входу исполнительного механизма, а второй вход блока стробирования подключен ко второму выходу передатчика, отличающееся тем, что в него введены первый полосовой фильтр, настроенный на учетверенную частоту вращения фазовой пластинки, второй полосовой фильтр, настроенный на увосьмеренную частоту вращения фазовой пластинки, два фазовых, два амплитудных детектора, четыре индикатора и датчик углового положения фазовой пластинки, причем входы первого и второго полосовых фильтров подключены к выходу пикового детектора, вход первого амплитудного детектора и первый вход первого фазового детектора подключены к выходу первого полосового фильтра, вход второго амплитудного детектора и первый вход второго фазового детектора подключены к выходу второго полосового фильтра, вход датчика углового положения фазовой пластинки механически связан с вторым выходом исполнительного механизма, вторые входы первого и второго фазовых детекторов подключены к первому и второму выходам датчика углового положения фазовой пластинки соответственно, выходы первого и второго амплитудных и первого и второго фазовых детекторов подключены к входам первого, второго, третьего и четвертого индикаторов соответственно, при этом приемник выполнен логарифмическим, а электрическая длина фазовой пластинки составляет половину длины волны, генерируемой передатчиком.
Анализ предложенного способа показал, что данный способ не позволяет осуществлять селекцию радиолокационных целей, а предназначен только для измерения поляризационных характеристик радиолокационных целей. К недостаткам предложенного устройства, осуществляющего измерение поляризационных характеристик радиолокационных целей, относится то, что в этом устройстве отсутствует блок, осуществляющий принятие решения о наличии или отсутствии селектируемой цели по совокупности поляризационных характеристик в соответствии с оптимальным решающим правилом.
В [2] задача селекции радиолокационных целей по поляризационным признакам сформулирована в терминах проверки статистических гипотез и предлагается некоторое интуитивно оправданное решающее правило, которое позволяет относить наблюдаемую радиолокационную цель к одному из двух взаимоисключающих классов, однако, исследования оптимальности этого решающего правила нет.
В настоящей заявке осуществляется синтез такого правила принятия решения о селекции цели по совокупности поляризационных признаков, которое являлось бы оптимальным по критерию максимального правдоподобия [3].
Поляризационные параметры цели, принадлежащей к одному из k взаимоисключающих классов, являются случайными величинами, характеризуемыми некоторой многомерной условной функцией распределения плотности вероятности:

где x1,…, xn или Xn - поляризационные параметры k-й цели sk, из группы целей общее количество которых равно К.
Наличие знака условной плотности вероятности подчеркивает тот факт, что в общем случае каждая из целей характеризуется своей функцией распределения плотности вероятности, как по форме, так и по значению параметров функции распределения.
В процессе проведения измерения отраженного от цели сигнала происходит выделение из него поляризационных параметров цели, в результате чего формируется совокупность этих параметров. Т.е. под сигналом подразумевается некоторая функция, зависящая от времени, имеющая сложную форму и обладающая сложным спектральным составом гармонических составляющих. В каждый момент времени все эти гармонические составляющие присутствуют в сигнале, и именно они и рассматриваются в качестве поляризационных характеристик радиолокационной цели. Таким образом, под измерением отраженного от цели сигнала понимается выделение из этого сигнала гармонических составляющих, несущих в себе информацию о поляризационных характеристиках радиолокационной цели. Эта информация и рассматривается в качестве совокупности поляризационных параметров.
Решающее правило позволяет отнести полученную совокупность поляризационных параметров к одному из взаимоисключающих классов, каждый из которых соответствует той или иной цели.
Решение принимается на основе теории статистических решений [3].
Решающие правила для К≥ 2 классов основаны на сравнении отношений правдоподобия:

между собой или с определенным порогом [4]. В задачах обнаружения (двухальтернативное распознавание) К=2, отношение правдоподобия принимает вид:

а решение принимается путем сравнивания отношения правдоподобия с порогом λ . При 1(Хn)≥ λ принимается решение о принадлежности совокупности поляризационных параметров цели к классу s2, при 1(Хn)≤ λ совокупность относят к классу s1.
В многоальтернативных задачах при числе классов К>2 решающее правило будет иметь более сложный вид [4].
Для расчета характеристик обнаружения радиолокационных целей по поляризационным признакам воспользуемся критерием максимального правдоподобия [3].
Для двухальтернативного распознавания решающее правило по критерию максимального правдоподобия имеет вид:
Будем считать, что s2 соответствует обнаруживаемой цели, a s1 соответствует помехе, т.е. отсутствию цели; или соответствует цели, которая нас не интересует, т.е. цели, относительно которой у нас отсутствует задача ее обнаружения.
Порог λ в случае использования критерия максимального правдоподобия принимает значение, равное единице (λ =1) [3].
Известно [3], что при априорно известных плотностях w(Xn|s1) и w(Xn|s2), правило (4) обеспечивает принятие наиболее правдоподобного решения о наличии или отсутствии цели по сравнению с любыми другими правилами, в случае если нет никаких априорных сведений ни о вероятности появления цели, ни о потерях, возникающих в случае неверного решения. В этом смысле правило (4) является оптимальным.
Для оценки поляризационных параметров радиолокационной цели могут быть использованы, например, модуляционные методы, основанные на применении поляризационно-модулированных зондирующих сигналов [1, 5, 6].
При этом осуществляется модуляция линейно-поляризованных зондирующих сигналов путем вращения их плоскости поляризации с частотой Ω - частотой поляризационной модуляции.
В результате спектрального анализа сигнала на выходе приемника с логарифмической амплитудной характеристикой, при наличии поляризационного модулятора в высокочастотном тракте локатора, было выявлено [7, 8], что амплитуды и фазы спектральных составляющих огибающей принимаемого сигнала на частотах, кратных частоте поляризационной модуляции, несут информацию о поляризационных параметрах цели. Наиболее информативными являются вторая и четвертая гармоники частоты поляризационной модуляции. При этом, отвлекаясь от физической сущности поляризационных параметров, в задаче селекции радиолокационных целей сами амплитуды и фазы спектральных составляющих можно считать поляризационными параметрами цели.
В такой постановке задачи, многомерная условная функция распределения плотности вероятности поляризационных параметров цели имеет размерность 4 и представляет совместное распределение следующих поляризационных параметров цели:
A2Ω - амплитуда второй гармоники принимаемого сигнала;
А4Ω - амплитуда четвертой гармоники принимаемого сигнала;
ϕ 2Ω - фаза второй гармоники принимаемого сигнала;
ϕ 4Ω - фаза четвертой гармоники принимаемого сигнала.
Рассмотрим случай двухальтернативного распознания, когда необходимо принять решение о наличии или отсутствии цели с заранее известными поляризационными характеристиками (т.е. с известными функциями распределения плотности вероятности w(A2Ω , А4Ω , ϕ 2Ω ; ϕ 4Ω |s1) и w(A2Ω , А4Ω , ϕ 2Ω , ϕ 4Ω |s2)) по одной совокупности значений поляризационных параметров.
Известность поляризационных характеристик означает, что известными являются как вид функций плотности вероятности w(A2Ω , A4Ω , ϕ 2Ω , ϕ 4Ω |s1) и w(A2Ω , A4Ω , ϕ 2Ω , ϕ 4Ω |s2), так и характеристики (в частности, средние значения и среднеквадратичные отклонения параметров А2Ω , А4Ω , ϕ 2Ω , ϕ 4Ω ) этих функций. Т.е. предполагается, что функции плотности вероятности w(A2Ω , А4Ω , ϕ 2Ω , ϕ 4Ω |s1) и w(A2Ω , A4Ω , ϕ 2Ω , ϕ 4Ω |s2) вместе с их характеристиками измерены предварительно, например, с использованием способов, описанных в [1, 2, 6, 7, 8].
Будем считать, что поляризационные параметры как класса s1, так и класса s2, представляют собой совокупности статистически независимых случайных величин, подчиненных нормальному закону распределения.
Для начала рассмотрим одномерный случай, т.е. попытаемся провести селекцию цели по значению всего лишь одного параметра (не важно какого, - пусть это будет А2Ω ) в соответствии с критерием максимального правдоподобия.
В случае нормального закона распределения, функции плотности вероятности описываются соотношениями [3]:


 и
и  - средние значения параметра А2Ω для классов s1 и s2, соответственно;
- средние значения параметра А2Ω для классов s1 и s2, соответственно;  и
и  - среднеквадратичные отклонения параметра А2Ω для классов s1 и s2, соответственно. Величины
- среднеквадратичные отклонения параметра А2Ω для классов s1 и s2, соответственно. Величины  ,
,  ,
,  и
и  предполагаются известными и определяются конкретными классами s1 и s2.
предполагаются известными и определяются конкретными классами s1 и s2.
Определим отношение правдоподобия для этих двух функций плотности вероятностей:

После вычисления значения этой функции его необходимо сравнить с порогом λ =1.
Если значение 1(А2Ω ) оказывается больше или равно λ , то принимается решение о том, что данное значение A2Ω соответствует цели класса s2 и цели класса s1 в противном случае.
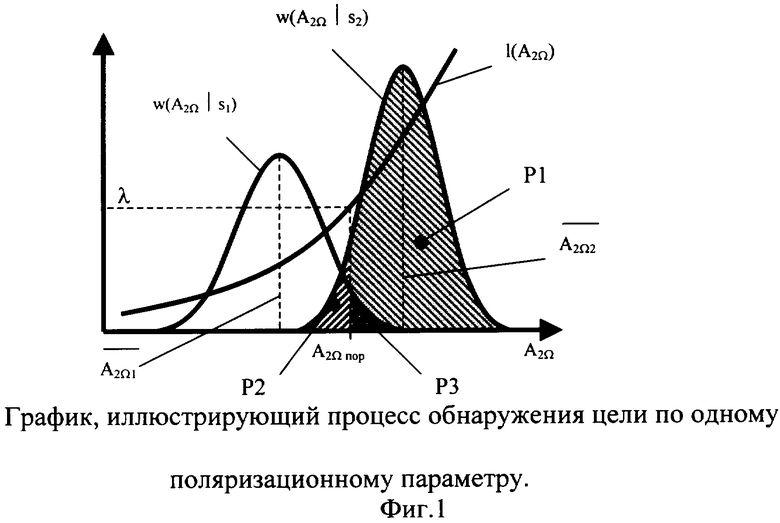
Графическая иллюстрация данного процесса приведена на фиг.1.
Очевидно, что в случае равенства среднеквадратичных отклонений параметра А2Ω для классов s1 и s2, значению порога λ =1 соответствует некоторое единственное значение поляризационного параметра А2Ω пор, поскольку отношение правдоподобия представляется в этом случае монотонной экспоненциальной функцией.
Поэтому для систем, у которых порог не будет изменяться в процессе работы, можно не вычислять каждый раз значение функции отношения правдоподобия 1(А2Ω ), а, определив предварительно А2Ω пор, сравнивать с ним значение самого поляризационного параметра А2Ω .
При этом, если  принимается решение о наличии цели s2 и s1 - в противном случае.
принимается решение о наличии цели s2 и s1 - в противном случае.
На фиг.1 площадь заштрихованной области Р1 дает вероятность обнаружения цели, Р2 - вероятность пропуска цели, а Р3 - вероятность ложной тревоги, т.е. ситуации, когда цель отсутствует, а система принимает решение о ее наличии.
В соответствии с критерием максимального правдоподобия данный алгоритм селекции цели по одному поляризационному параметру является оптимальным.
Рассмотрим ситуацию, когда обнаружение цели осуществляется по двум поляризационным параметрам (например, А2Ω и ϕ 2Ω ). При этом попытаемся определить, достаточно ли будет сравнить значения этих параметров с порогами, определенными для каждого из этих параметров отдельно, для того, чтобы принять решение о принадлежности выборки к какому-либо классу. Т.е. попытаемся определить, достаточно ли будет выполнение условия (4) для параметра А2Ω и аналогичного условия для параметра ϕ 2Ω ; для того, чтобы принять решение о том, что выборка принадлежит классу s2.
Поскольку мы предполагаем нормальный закон распределения, то функции плотности вероятности для поляризационного параметра ϕ 2Ω цели классов s1 и s2 будут, соответственно, равны:


где:
 и
и  - средние значения параметра ϕ 2Ω для классов s1 и s2, соответственно;
- средние значения параметра ϕ 2Ω для классов s1 и s2, соответственно;  и
и  - среднеквадратичные отклонения параметра ϕ 2Ω для классов s1 и s2, соответственно. Величины
- среднеквадратичные отклонения параметра ϕ 2Ω для классов s1 и s2, соответственно. Величины  ,
,  ,
,  и
и  предполагаются известными и определяются конкретными классами s1 и s2.
предполагаются известными и определяются конкретными классами s1 и s2.
Кроме этого, поскольку мы предполагаем статистическую независимость поляризационных параметров А2Ω и ϕ 2Ω , то их совместная двухмерная функция плотности распределения будет равна произведению одномерных для каждого из этих параметров:


Рассмотрим ситуацию, когда среднеквадратичные отклонения параметров ϕ 2Ω и А2Ω для обеих групп s1 и s2 равны между собой:


Отношение правдоподобия для двумерных функций плотностей вероятностей поляризационных параметров ϕ 2Ω и А2Ω целей групп s1 и s2 в этом случае будет равно:
Проделав необходимые преобразования и введя обозначения:

окончательно получим:

Как и в случае одномерного отношения правдоподобия, после вычисления значения этой двумерной функции его необходимо сравнить с порогом λ =1.
Если значение 1(А2Ω , ϕ 2Ω ) оказывается больше или равно λ , то принимается решение о том, что данное сочетание значений поляризационных параметров А2Ω и ϕ 2Ω соответствует цели класса s2 и цели класса s1 в противном случае.
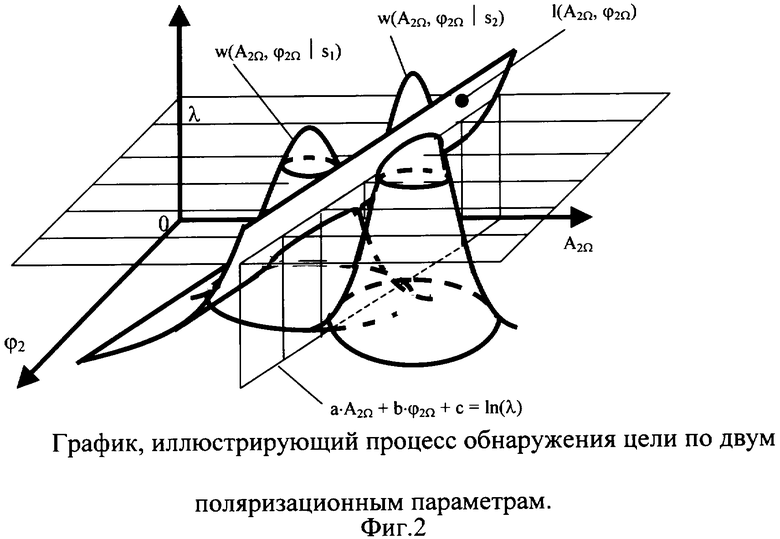
Графическая иллюстрация данного процесса приведена на фиг.2.
Таким образом, отношение правдоподобия представляет собой криволинейную плоскость, кривизна которой описывается экспоненциальным законом (16).
Порог λ также представляет собой плоскость, параллельную плоскости (А2Ω 0 ϕ 2Ω ). Поскольку проекция криволинейной плоскости 1(А2Ω , ϕ 2Ω ) на плоскость (а2Ω 0 ϕ 2Ω ) является линейной, то пересечение плоскости λ с плоскостью 1(А2Ω , ϕ 2Ω ) дает в проекции на плоскость (А2Ω 0 ϕ 2Ω ) прямую линию, описываемую соотношением:

Как и в случае с использованием всего одного параметра для решения задачи обнаружения цели, в силу монотонности функции 1(А2Ω , ϕ 2Ω ) по какой-либо из координат, при любом фиксированном значении другой координаты, вычисление значения отношения правдоподобия для данной совокупности поляризационных параметров (А2Ω , ϕ 2Ω ) можно заменить использованием более простого соотношения (17).
Таким образом, приняв λ =1, мы однозначно определяем прямую (17), т.е. однозначно определяем правило принятия решения о принадлежности цели тому или иному классу:

Таким образом, оказывается, что для принятия решения о соответствии данной совокупности одному из двух классов целей по двум поляризационным параметрам не достаточно сравнивать значения этих параметров с пороговыми уровнями, определенными для каждого из этих параметров в отдельности, как это предложено в [2]. Необходимо использовать соотношение (18), дающее оптимальное правило принятия решения.
В случае если поляризационные параметры сравниваются с определенными для них порогами по отдельности, а решение о принадлежности цели к классу s2 принимается, только если оба параметра превышают этот порог, вероятность неправильного решения о принадлежности цели классу s1 возрастает по сравнению с вероятностью неправильного решения, определяемой оптимальным правилом (18).
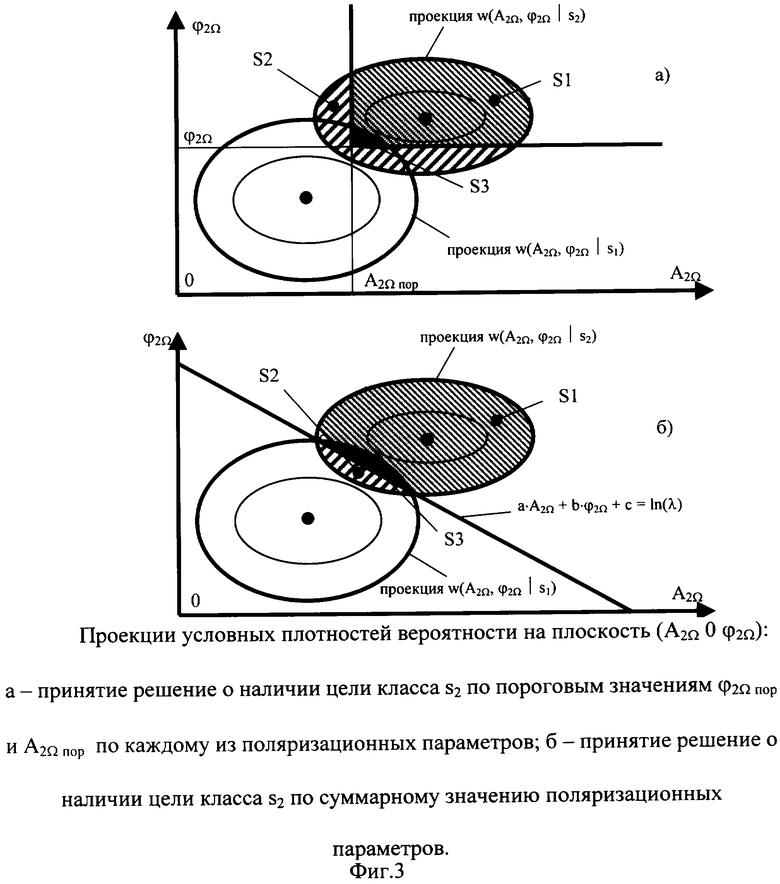
Поясним данную ситуацию графически. Для этого изобразим проекцию графиков фиг.2 на плоскость (А2Ω 0 ϕ 2Ω ) (фиг.3, а и б).
На фиг.3 область S1 соответствует проекции фигуры w(A2Ω , ϕ 2Ω |s2), обрезанной плоскостями ϕ 2Ω пор и А2Ω пор - фиг.3, а, и плоскостью a· A2Ω +b· ϕ 2Ω +с=ln(λ ) - фиг.3, б, объем которой равен вероятности обнаружения цели s2.
Область S2 соответствует проекции фигуры w(A2Ω , ϕ 2Ω |s2), обрезанной плоскостями ϕ 2Ω пор и А2Ω пор - фиг.3, а, и плоскостью a· A2ϕ +b· ϕ 2Ω +с=ln(λ ) - фиг.3, б, объем которой равен вероятности пропуска цели.
Область S3 соответствует проекции фигуры, w(A2Ω , ϕ 2Ω |s1), обрезанной плоскостями ϕ 2Ω пор и А2Ω пор - фиг.3, а, и плоскостью а· А2Ω +b· ϕ 2Ω +с=ln(λ ) - фиг.3, б, объем которой равен вероятности ложной тревоги.
С точки зрения используемого нами критерия максимального правдоподобия, при равенстве объемов фигур, соответствующих области S3, как это наглядно видно из фиг.3, при использовании критерия (18) вероятность пропуска цели будет меньше.
Обобщая данный подход на случай использования всех четырех поляризационных параметров и вводя дополнительные обозначения:

где:
 и
и  - средние значения параметра А4Ω для классов s1 и s2, соответственно;
- средние значения параметра А4Ω для классов s1 и s2, соответственно;  и
и  - среднеквадратичные отклонения параметра А4Ω для классов s1 и s2, соответственно, причем:
- среднеквадратичные отклонения параметра А4Ω для классов s1 и s2, соответственно, причем:

 и
и  - средние значения параметра ϕ 4Ω для классов S1 и S2, соответственно;
- средние значения параметра ϕ 4Ω для классов S1 и S2, соответственно;  и
и  - среднеквадратичные отклонения параметра ϕ 4Ω для классов S1 и S2, соответственно, причем:
- среднеквадратичные отклонения параметра ϕ 4Ω для классов S1 и S2, соответственно, причем:

получим:
Величины  ,
, ,
,

 ,
,  ,
,  и
и  предполагаются известными и определяются конкретными классами s1 и s2.
предполагаются известными и определяются конкретными классами s1 и s2.
Откуда получим, что отношение правдоподобия для четырехмерных функций плотностей вероятностей поляризационных параметров (А2Ω , А4Ω , ϕ 2Ω , ϕ 4Ω ) целей групп s1 и s2 в этом случае будет равно:

Что касается правила принятия решения, то оно будет следующим:

Для удобства практической реализации правило принятия решения о наличии селектируемой цели s2 можно записать следующим образом:
Селектируемая цель присутствует, если:


при λ =1.
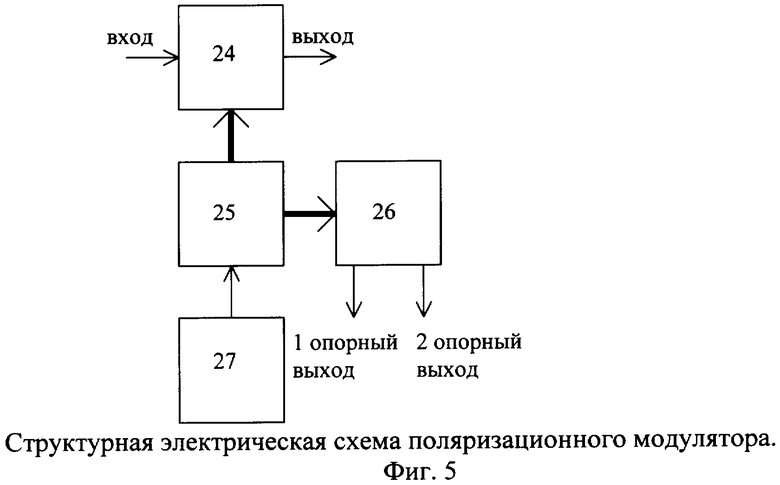
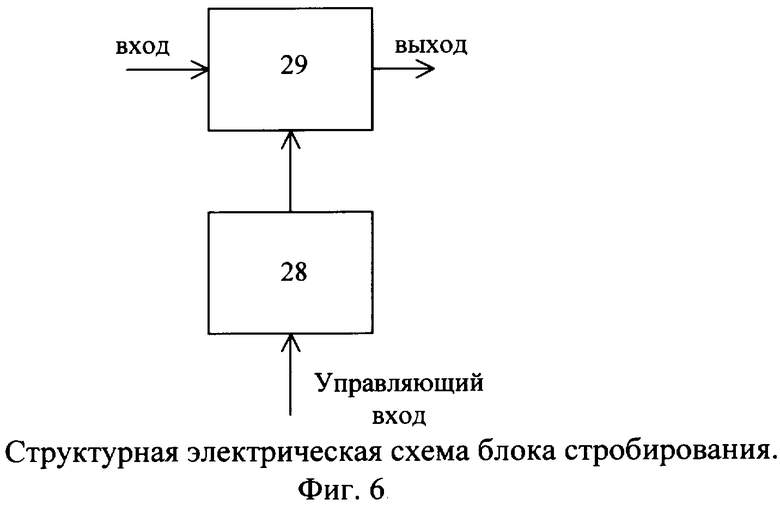
На фиг.4 приведена структурная электрическая схема предлагаемого устройства, реализующего правило (26); на фиг.5 - пример выполнения поляризационного модулятора; на фиг.6 - пример выполнения блока стробирования.
Устройство селекции радиолокационных целей содержит передатчик 1, антенный переключатель 2, поляризационный модулятор 3, антенну 4, блок стробирования 5, приемник 6, первый и второй фазовращатели 7, 8, пиковый детектор 9, первый и второй полосовые фильтры 10, 11, первый амплитудный детектор 12, первый фазовый детектор 13, второй амплитудный детектор 14, второй фазовый детектор 15, индикатор 16 и решающий блок 17, который содержит первый, второй, третий и четвертый пропорциональные умножители 18-21, сумматор 22 и компаратор 23. Поляризационный модулятор 3 содержит волноводную вращающуюся секцию 24, исполнительный механизм 25, блок 26 управления и датчик 27 углового положения. Блок 5 стробирования содержит блок 28 задержки и ключ 29.
Устройство селекции радиолокационной цели работает следующим образом.
Передатчик 1 генерирует высокочастотные импульсы, которые через антенный переключатель 2 поступают на поляризационный модулятор 3. Назначение поляризационного модулятора 3 - преобразовать линейно поляризованное излучение передатчика 1 в излучение, плоскость поляризации которого вращается с частотой Ω . Кроме того, назначение поляризационного модулятора 3 - выделить из отраженного целью сигнала составляющую, плоскость поляризации которой совпадает с плоскостью поляризации излученного импульса. Поляризационный модулятор 3 выполнен в виде вращающейся с частотой Ω /2 секции 24 круглого волновода с вмонтированной в нее полуволновой фазовой пластиной (на фиг.5 не показано). К антенному переключателю 2 вращающаяся секция 24 подключена с помощью перехода с круглого волновода на прямоугольный (на фиг.5 не показано). Вращение вращающейся секции 24 обеспечивается исполнительным механизмом 24, управляемым сигналами блока 26 управления. Для получения информации об угловом положении фазовой пластины в состав поляризационного модулятора 3 входит датчик 27 углового положения, механически связанный с исполнительным механизмом 25. На двух выходах датчика 27 углового положения формируются синусоидальные напряжения частотой 2Ω и 4Ω . Выходы датчика 27 углового положения являются первым и вторым опорными выходами поляризационного модулятора 3.
Пройдя поляризационный модулятор 3, сигнал поступает на антенну 4 и излучается в направлении цели. Отраженный целью сигнал улавливается антенной 4 и, пройдя поляризационный модулятор 3 и антенный переключатель 2, поступает на вход приемника 6. В приемнике 6 сигнал усиливается до необходимого уровня и подается на вход блока 5 стробирования. На управляющий вход блока 5 стробирования из передатчика 1 поступает импульс запуска передатчика 1. В блоке 5 стробирования импульс запуска передатчика 1 задерживается с помощью блока 28 задержки на время, равное времени распространения сигнала до цели и обратно, после чего подается на управляющий вход ключа 29, через который проходит принятый сигнал. С выхода блока 5 стробирования принятый сигнал поступает на вход пикового детектора 9, где осуществляется выделение и запоминание уровня принятого сигнала на время, равное периоду следования излучаемых импульсов.
С выхода пикового детектора 9 сигнал поступает на входы первого и второго полосовых фильтров 10, 11, первый из которых настроен на частоту 2Ω , а второй - 4Ω . Назначение первого и второго полосовых фильтров 10, 11 - выделение из принимаемого сигнала спектральных составляющих на частотах 2Ω и 4Ω .
С выходов первого и второго полосовых фильтров 10, 11 сигналы синусоидальной формы частотой 2Ω и 4Ω поступают на входы первого и второго амплитудных и фазовых детекторов 12-15. Опорным напряжением для первого и второго фазовых детекторов 13, 15 служат синусоидальные напряжения, снимаемые с первого и второго опорных выходов поляризационного модулятора 3, пропущенные через первый и второй фазовращатели 7, 8. Величина фазовой задержки в этих фазовращателях 7, 8 выставляется соответственно равной удвоенной и учетверенной ориентации собственной системы координат цели, селекция которой осуществляется. Так, например, для селекции цели, у которой ориентация собственной системы координат совпадает с ориентацией системы координат, связанной с антенной 4, фазовая задержка в первом и втором фазовращателях 7 и 8 равна нулю.
С выходов первых и вторых амплитудных и фазовых детекторов 12-15 постоянные напряжения, пропорциональные амплитудам и фазам спектральных составляющих принимаемого сигнала на частотах 2Ω и 4Ω , подаются на входы четырех пропорциональных умножителей 18-21. Эти умножители 18-21 осуществляют пропорциональное умножение напряжений с выходов первых и вторых амплитудных и фазовых детекторов 12-15, на величину соответствующего коэффициента. Так, напряжение с выхода амплитудного детектора 12 умножается пропорциональным усилителем 20 в а раз, напряжение с выхода фазового детектора 13 умножается пропорциональным усилителем 18 в b раз, напряжение с выхода амплитудного детектора 14 умножается пропорциональным усилителем 21 в d раз, напряжение с выхода фазового детектора 15 умножается пропорциональным усилителем 19 в е раз. Напряжения с выходов пропорциональных умножителей 18-21 поступают на четыре входа сумматора 22. На пятый вход сумматора поступает напряжение U2, пропорциональное параметру с. Сумматор 22 осуществляет суммирование поступающих на его четыре входа напряжений с выходов четырех пропорциональных умножителей 18-21 и напряжения U2. Суммарное напряжение с выхода сумматора 22 поступает на вход компаратора 23. На опорный вход компаратора 23 поступает пороговое напряжение U1, пропорциональное порогу принятия решения правила (26) - ln(λ ). Величина порогового напряжения U2, пропорционального порогу принятия решения правила (26)-ln(λ ), коэффициенты умножения пропорциональных умножителей 18-19 а, b, d и е, а также величина напряжения U2, пропорционального параметру с, рассчитываются заранее, исходя из поляризационных свойств селектируемых целей, их статистических характеристик, а также аналитической связи амплитуд и фаз спектральных составляющих с поляризационными параметрами цели.
Компаратор 23 работает таким образом, что напряжение на его выходе появляется только тогда, когда напряжение на сигнальном входе равно или больше опорного напряжения. Индикатор 16 фиксирует наличие выходного сигнала решающего блока 17 и соответственно наличие селектируемой цели. В качестве индикатора 16 может быть использован стрелочный прибор, самописец, электронно-лучевой индикатор и др.
Индикатор 16 фиксирует наличие цели s2 только в том случае, если выполняется условие решающего правила (26), или, что эквивалентно, если напряжение с выхода сумматора 22 превышает пороговое напряжение U1.
Использование предлагаемого устройства позволяет повысить эффективность селекции радиолокационных целей и осуществить селекцию анизотропных целей на анизотропном фоне.
СПИСОК ИСПОЛЬЗОВАННОЙ ЛИТЕРАТУРЫ
1. Авторское свидетельство СССР. №1232034 A1, In.cl4 G 01 S 13/02, приоритет от 30.03.1993 г.
2. Бадулин Н.Н. Обнаружение искусственных радиолокационных целей по поляризационным признакам на фоне земной поверхности / Н.Н.Бадулин, В.В.Былина, В.Л.Гулько, А.Ф.Петров, К.Г.Соколов, Е.Л.Шошин. - Изв. вузов СССР, Радиоэлектроника. - 1991. - №8. - с.29-32.
3. Левин Б.Р. Теоретические основы статистической радиотехники. Кн. 1-3 / Б.Р.Левин. - М.: Сов. Радио, 1974-1976. кн.1 - 552с., кн.2 – 392 с., кн.3 - 288с.
4. Фомин Я.А. Статистическая теория распознавания образов / Я.А.Фомин, Г.Р.Тарловский. - М.: Радио и связь, 1986. – 264 с.
5. Богородский В.В. Поляризация рассеянного и собственного радиоизлучения земных покровов / В.В.Богородский, Д.Б.Канарейкин, А.И.Козлов. - Л.: Гидрометеоиздат, 1981. - 297 с.
6. Бадулин Н.Н. Дистанционное зондирование микрофизической структуры облаков с использованием поляризационной манипуляции / Н.Н.Бадулин, А.П.Бацула, Е.Б.Кульшенева, С.П.Лукьянов, Е.В.Масалов, В.Н.Татаринов. - Изв. вузов СССР, Физика. - 1983, №6.
7. Бадулин Н.Н. Спектральные характеристики эхо-сигналов при поляризационной модуляции излучения РЛС / Н.Н.Бадулин, В.Л.Гулько. -Изв. вузов СССР, Радиоэлектроника. - 1988. - №4. - с.74-76.
8. Бадулин Н.Н. Спектральные характеристики рассеянных радиолокационными целями сигналов при поляризационной модуляции излучения РЛС / Н.Н.Бадулин, В.Л.Гулько, Е.В.Маслов. - Изв. вузов СССР, Радиоэлектроника. - 1991. - №11. - с.65-67.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СЕЛЕКЦИИ ОБЪЕКТОВ БРОНЕТАНКОВОЙ ТЕХНИКИ, ОСНАЩЕННЫХ СРЕДСТВАМИ МАСКИРОВКИ | 2021 |
|
RU2783347C1 |
| ПОЛЯРИЗАЦИОННО-МОДУЛЯЦИОННЫЙ СПОСОБ РАДИОЛОКАЦИОННОГО ИЗМЕРЕНИЯ УГЛА КРЕНА ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2013 |
|
RU2537384C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И КЛАССИФИКАЦИИ НАДВОДНЫХ ЦЕЛЕЙ | 2005 |
|
RU2287840C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И СЕЛЕКЦИИ РАДИОЛОКАЦИОННЫХ СИГНАЛОВ ПО ПОЛЯРИЗАЦИОННОМУ ПРИЗНАКУ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2476903C2 |
| СПОСОБ СЕЛЕКЦИИ НАДВОДНЫХ ЦЕЛЕЙ | 1995 |
|
RU2083996C1 |
| ИМПУЛЬСНО-ДОПЛЕРОВСКАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 1997 |
|
RU2109306C1 |
| СПОСОБ ПЕРЕДАЧИ ОПОРНОГО СИГНАЛА НА РАЗНЕСЕННЫЕ В ПРОСТРАНСТВЕ ПУНКТЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1990 |
|
RU2033694C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ УМЕНЬШЕНИЯ УХУДШЕНИЯ ОПТИЧЕСКОГО СИГНАЛА С ПОЛЯРИЗАЦИОННЫМ УПЛОТНЕНИЕМ | 2003 |
|
RU2287905C2 |
| УСТРОЙСТВО РАСПОЗНАВАНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ С АДАПТИВНЫМ ВЫБОРОМ МОМЕНТА АНАЛИЗА ОТРАЖЕННОГО СИГНАЛА | 2008 |
|
RU2377596C1 |
| УСТРОЙСТВО СЕЛЕКЦИИ САМОНАВОДЯЩИХСЯ ПРОТИВОРАДИОЛОКАЦИОННЫХ РАКЕТ | 1998 |
|
RU2155353C2 |

Изобретение относится к радиолокации и радионавигации и может быть использовано для селекции радиолокационных целей при управлении движением воздушного и морского транспорта на фоне мешающих отражений и помех. Достигаемый технический результат – повышение эффективности селекции цели с известными поляризационными параметрами, т.е. при заданной вероятности ложной тревоги снижение до минимума вероятности принятия решения об отсутствии цели при ее наличии (вероятности пропуска цели). Способ селекции заключается в том, что радиолокационная цель с известными поляризационными параметрами облучается сигналами линейной поляризации с вращающейся плоскостью поляризации. В отраженном от цели сигнале выделяют вторую и четвертую относительно частоты вращения плоскости поляризации исходного сигнала гармоники, параметры которых (амплитуды и фазы) и являются поляризационными параметрами цели. Решение о наличии или отсутствии селектируемой цели принимается на основе решающего правила, представляющего собой линейную комбинацию поляризационных параметров с коэффициентами, определяемыми статистическими характеристиками поляризационных параметров при наличии и при отсутствии цели. Порог принятия решения решающего правила определяется критерием максимального правдоподобия и принимается равным единице. Устройство селекции радиолокационной цели содержит решающий блок, реализующий данное решающее правило. 2 н.п. ф-лы, 6 ил.
если выполняется условие:
(a·A2Ω+b·ϕ2Ω+d·A4Ω+e·ϕ4Ω+c′)≥0,
то селектируемая цель присутствует, и отсутствует, если это условие не выполняется,
где

где
 и
и  - средние значения параметра A2Ω для случая отсутствия и наличия селектируемой цели соответственно;
- средние значения параметра A2Ω для случая отсутствия и наличия селектируемой цели соответственно;  - среднеквадратичное отклонение параметра A2Ω;
- среднеквадратичное отклонение параметра A2Ω;
 и
и  - средние значения параметра ϕ2Ω для случая отсутствия и наличия селектируемой цели соответственно;
- средние значения параметра ϕ2Ω для случая отсутствия и наличия селектируемой цели соответственно;  - среднеквадратичное отклонение параметра ϕ2Ω;
- среднеквадратичное отклонение параметра ϕ2Ω;
 и
и  - средние значения параметра A4Ω для случая отсутствия и наличия селектируемой цели соответственно;
- средние значения параметра A4Ω для случая отсутствия и наличия селектируемой цели соответственно;  среднеквадратичное отклонение параметра A4Ω;
среднеквадратичное отклонение параметра A4Ω;
 и
и  - средние значения параметра ϕ4Ω для случая отсутствия и наличия селектируемой цели соответственно;
- средние значения параметра ϕ4Ω для случая отсутствия и наличия селектируемой цели соответственно;  среднеквадратичное отклонение параметра ϕ4Ω.
среднеквадратичное отклонение параметра ϕ4Ω.
| Способ измерения поляризационных характеристик радиолокационной цели и устройство для его реализации | 1984 |
|
SU1232034A1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПОЛЯРИЗАЦИОННОЙ МАТРИЦЫ РАССЕЯНИЯ ОБЪЕКТА | 2001 |
|
RU2190239C1 |
| СПОСОБ РАСПОЗНАВАНИЯ ЦЕЛЕЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2192652C1 |
| US 4849762, 18.07.1989 | |||
| US 4035797, 12.07.1977 | |||
| US 4660044, 21.04.1987 | |||
| DE 4330872 A1, 16.03.1995 | |||
| US 5334981 A, 02.08.1994 | |||
| Способ реабилитации постинфарктных больных | 1986 |
|
SU1424842A1 |
| БАДУЛИН Н.Н | |||
| и др | |||
| Спектральные характеристики рассеянных радиолокационными целями сигналов при поляризационной модуляции излучения РЛС | |||
| Известия вузов СССР | |||
| Радиоэлектроника | |||
| Походная разборная печь для варки пищи и печения хлеба | 1920 |
|
SU11A1 |

