Изобретение относится к области измерительной техники, а более конкретно к измерительным элементам линейного ускорения.
Известен частотный датчик линейных ускорений (патент РФ №2436106, МПК G01P 15/097 (2006.01), опубликовано 10.12.2011), содержащий основание, закрепленный на нем герметичный кожух, рамочный корпус, внутри которого размещены инерционный груз, соединенный через упругий подвес с рамочным корпусом, балочный резонатор, соединенный с одной стороны с инерционным грузом, а с другой стороны с рамочным корпусом, систему возбуждения и съема сигнала, расположенную на основании, в котором выполнены пазы, образующие плоские пружины.
Пазы разделяют основание на две составные части, причем одна часть выступами прикреплена к рамочному корпусу, а другая - к объекту.
Известен датчик наиболее близкий по технической сущности и достигаемому результату к заявляемому, выбранный в качестве прототипа - это датчик линейных ускорений (патент РФ №2 650 715, МПК G01P 15/097 (2006.01), опубликовано 17.04.2018), содержащий основание, закрепленный на нем герметичный кожух, рамочный корпус, внутри которого размещены инерционная масса (инерционный груз), соединенная через упругий подвес с рамочным корпусом, стержневой (балочный) резонатор, соединенный с одной стороны с инерционной массой, а с другой стороны с рамочным корпусом, систему возбуждения и съема сигнала, систему компенсации фона выходного сигнала, а в основании выполнены образующие плоские пружины фигурные пазы, заполненные демпфирующим материалом.
Пазы разделяют основание на две составные части, соединенные между собой плоскими пружинами, причем одна часть выступами прикреплена к рамочному корпусу, а другая - к объекту.
Известный датчик, так же как и предыдущий аналог позволяет с высокой точностью преобразовывать ускорение в частотный выходной сигнал.
Общим недостатком рассмотренных аналогов является то, что они не обеспечивают устойчивого подавления колебаний системы, что приводит к увеличению погрешности выходного сигнала частотного датчика при воздействии вибрационных нагрузок.
Задача предлагаемого изобретения - увеличение надежности работы, точности измерения и стабильности параметров частотного датчика линейных ускорений при воздействии вибрационной нагрузки.
Технический результат, достигнутый при осуществлении предлагаемого изобретения, заключается в уменьшении погрешности выходного сигнала частотного датчика линейных ускорений при воздействии вибрационной нагрузки путем изменения конфигурации основания, что приводит к увеличению надежности работы, точности измерения и стабильности параметров частотного датчика линейных ускорений, при сохранении массы и габаритов прибора.
Указанный технический результат достигается тем, что в частотном датчике линейных ускорений, содержащем основание, закрепленный на нем герметичный кожух, рамочный корпус, внутри которого размещены инерционная масса, соединенная через упругий подвес с рамочным корпусом, стержневой резонатор, соединенный с одной стороны с инерционной массой, а с другой стороны с рамочным корпусом, систему возбуждения и съема сигнала, систему компенсации фона выходного сигнала, а в основании выполнены образующие плоские пружины фигурные пазы, заполненные демпфирующим материалом, согласно изобретению, основание снабжено системой пружин плоскопараллельного подвеса, образованной пазами, выполненными в основании со стороны крепления датчика к объекту, симметричными пазами, выполненными с другой стороны основания и фигурными пазами, а все пазы, разделяют основание на три части, соединенные между собой плоскими пружинами, причем одна часть расположена между двумя другими и к ней крепится рамочный корпус, две другие части крепятся к объекту.
Снабжение основания системой пружин плоскопараллельного подвеса, образованной пазами, симметричными пазами и фигурными пазами, разделяющих основание на три части, крепление рамочного корпуса к одной части основания, расположенного между двумя другими, которые крепятся к объекту позволяет обеспечить большую жесткость конструкции частотного датчика линейных ускорений, увеличить надежность работы, точность измерения и стабильность параметров частотного датчика линейных ускорений, при сохранении массы и габаритов прибора. Заполнение фигурных пазов, демпфирующим материалом позволяет основанию выполнять роль амортизирующей опоры, что обеспечивает уменьшение действия вибрации объекта на работу частотного датчика, что в свою очередь обеспечивает увеличение точности преобразования линейного ускорения при внешних воздействиях, уменьшение дополнительной погрешности устройства.
Кроме того, также для уменьшения погрешности выходного сигнала частотного датчика линейных ускорений при воздействии вибрационной нагрузки и сохранения габаритов и массы две части основания выполнены в виде двух неподвижных вертикальных стоек, крепящихся к объекту, между которыми расположена другая часть основания, выполненная в виде подвижной Т-образной стойки с выступами, на которых крепится рамочный корпус.
Для обеспечения надежности работы и увеличения точности частотного датчика линейных ускорений в условиях вибрационных воздействий в качестве демпфирующего материала используют компаунд КТ-102М.
Наличие в заявляемом изобретении признаков, отличающих его от прототипа, позволяет считать его соответствующим условию "новизна".
Новые признаки, которые содержит отличительная часть формулы изобретения, не выявлены в технических решениях аналогичного назначения и в технических решениях смежных областей техники. На этом основании можно сделать вывод о соответствии заявляемого изобретения условию "изобретательский уровень".
Изобретение иллюстрируется чертежами.
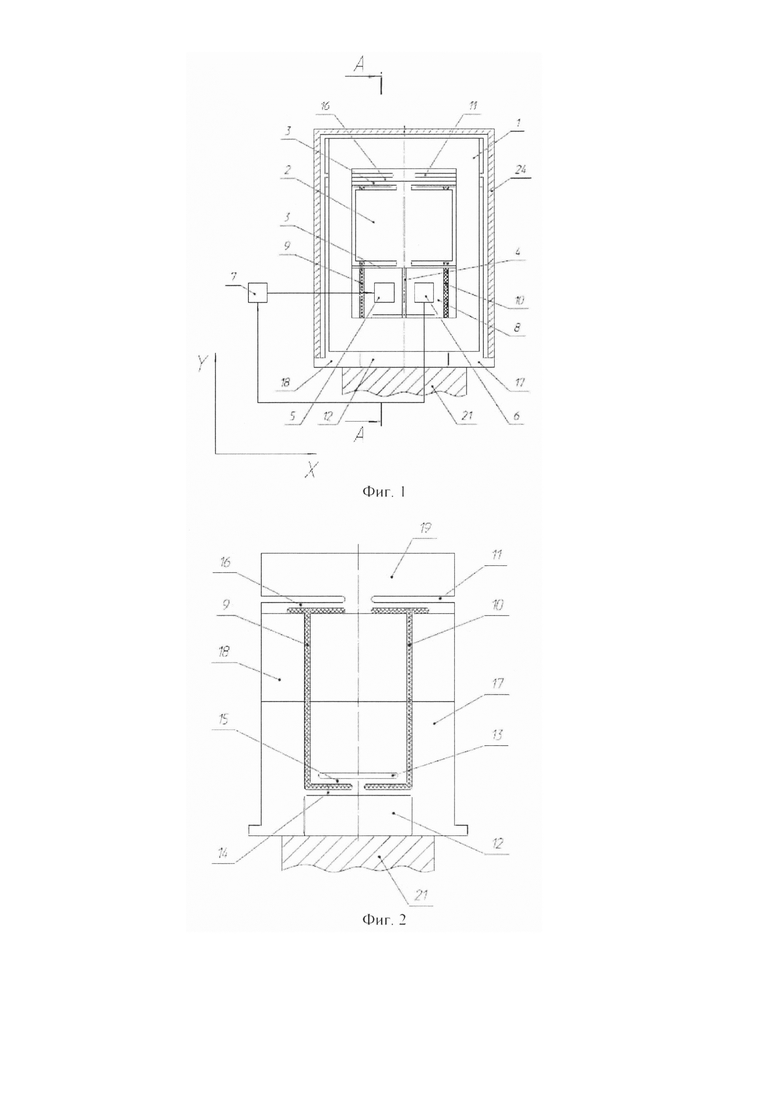
На фиг. 1 представлена конструкция предлагаемого частотного датчика линейных ускорений.
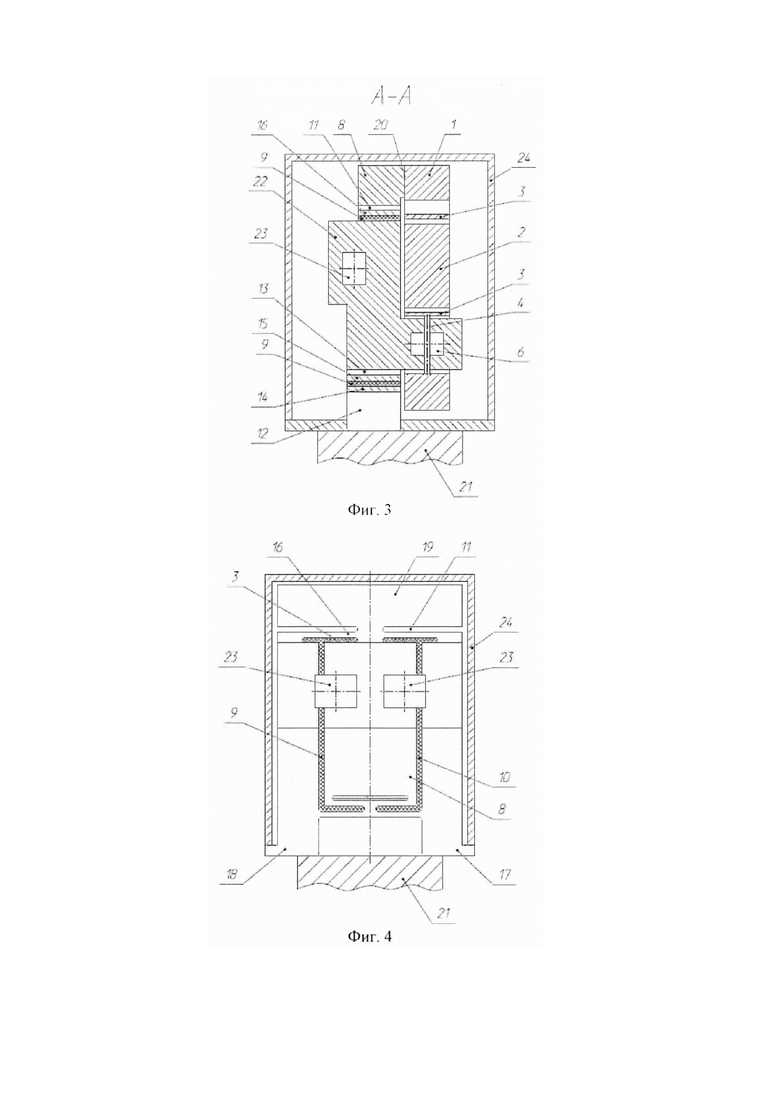
На фиг. 2 представлено основание частотного датчика линейных ускорений.
На фиг. 3 представлен разрез А-А на фиг. 1 частотного датчика линейных ускорений.
На фиг. 4 представлена обратная сторона конструкции предлагаемого частотного датчика линейных ускорений.
Частотный датчик линейных ускорений содержит прямоугольный рамочный корпус 1, в центральном отверстии которого размещены инерционная масса 2, соединенная с рамочным корпусом 1 с двух противоположных сторон через упругий подвес, выполненный в виде плоскопараллельных пружин 3, стержневой резонатор 4, соединенный с одной стороны с инерционной массой 2, а с другой стороны с рамочным корпусом 1, систему возбуждения и съема сигнала, состоящую из электромагнита возбуждения колебаний 5, электромагнита съема колебаний 6, между которыми расположен стержневой резонатор 4, и автогенератора 7. (фиг. 1).
Предлагаемый датчик снабжен основанием 8 прямоугольной формы, в котором выполнены: два фигурных паза 9 и 10, заполненные демпфирующим материалом, два симметричных паза 11, расположенные с одной стороны основания 8 и пазы 12 и 13, расположенные с противоположной стороны основания 8.
Фигурные пазы 9 и 10 расположены зеркально относительно центральной продольной оси. Каждый фигурный паз 9 и 10 содержит центральную часть, расположенную параллельно центральной продольной оси. На концах центральной части расположены верхняя и нижняя перпендикулярные части, обращенные к центральной продольной оси. Причем верхняя перпендикулярная часть имеет ответвление к краю основания 8, равное примерно одной трети от общей длины верхней перпендикулярной части.
Нижняя перпендикулярная часть фигурных пазов 9 и 10 с пазом 13 с одной стороны и пазом 12 с другой стороны образует две пары плоских пружин 14 и 15. Верхняя перпендикулярная часть фигурных пазов 9 и 10 с пазами 11 составляет третью пару пружин 16. Три пары плоских пружин 14, 15 и 16 параллельны друг другу и образуют собой систему пружин плоскопараллельного подвеса (фиг. 2).
Фигурные пазы 9 и 10, симметричные пазы 11 и пазы 12, 13 разделяют основание 8 на три части, выполненные в виде двух неподвижных вертикальных стоек 17 и 18, и в виде расположенной между ними подвижной Т-образной стойки 19. В горизонтальной части подвижной Т-образной стойки 19, расположенной выше верхних перпендикулярных частей фигурных пазов 9 и 10, имеются выступы 20, на которых крепится рамочный корпус 1. Вертикальная часть подвижной Т-образной стойки 19 образована центральными частями фигурных пазов 9 и 10, расположена между двумя неподвижными вертикальными стойками 17 и 18, которые соединяются с ней с помощью плоских пружин 14, 15 плоскопараллельного подвеса.
Система пружин 14, 15 и 16 плоскопараллельного подвеса обеспечивает развязку мест крепления стержневого резонатора 4 на выступах 20 от двух неподвижных вертикальных стоек 17 и 18, соединяющихся с объектом 21, создает независимое движение рамочного корпуса 1 от объекта 21, тем самым обеспечивается уменьшение передачи механических возмущений от объекта 21 к стержневому резонатору 4 (фиг. 2, 3).
На подвижной Т-образной стойке 19 и двух неподвижных вертикальных стойках 17 и 18 с противоположной стороны от места крепления рамочного корпуса 1, под верхними перпендикулярными частями фигурных пазов 9 и 10 расположен кронштейн 22, предназначенный для крепления системы компенсации фона выходного сигнала, состоящей из двух поляризованных электромагнитов 23, закрепленных с зазором напротив друг друга. Для защиты внутренних компонентов от внешних механических воздействий частотный датчик линейных ускорений содержит герметичный кожух 24, закрепленный на основании 8 (фиг. 3, 4).
Один из электромагнитов 23 и электромагнит возбуждения колебаний 5 подключены параллельно, а второй электромагнит 23 и электромагнит съема колебаний 6 подключены последовательно.
В качестве демпфирующего материала, заполняющего фигурные пазы 9 и 10, используется компаунд КТ-102М, который гасит резонансные колебания рамочного корпуса 1, вследствие чего уменьшается погрешность выходного сигнала частотного датчика линейных ускорений при воздействии вибрационной нагрузки, а также обеспечивается надежность работы прибора.
В основе принципа действия устройства лежит преобразование механических колебаний стержневого резонатора 4 в электрические с помощью системы электромагнитов.
При движении устройства с линейным ускорением в направлении оси чувствительности (ось Y, фиг. 1), на инерционную массу 2 будет действовать сила инерции, которая приведет к перемещению инерционной массы 2 в сторону, противоположную действию ускорения, что в свою очередь вызовет растяжение или сжатие стержневого резонатор 4. Такое растяжение или сжатие изменит резонансную частоту колебаний стержневого резонатора 4. При растяжении резонатора 4, его резонансная частота увеличится, при сжатии - уменьшится. По величине изменения резонансной частоты, являющейся выходным сигналом, судят о величине линейного ускорения устройства.
Измерение резонансной частоты колебаний резонатора 4 выполняет система возбуждения и съема сигнала колебаний резонатора 4. На электромагнит возбуждения колебаний 5 с выхода автогенератора 7 подается переменное напряжение, которое приводит к возникновению переменного магнитного потока, который вызовет колебания резонатора 4 на его собственной резонансной частоте. Колебания стержневого резонатора 4 приведут к переменному изменению магнитного зазора электромагнита съема колебаний 6, что приведет к наведению ЭДС в электромагните съема колебаний 6. Значение наводимой ЭДС будет пропорционально амплитуде и частоте колебаний стержневого резонатора 4. ЭДС, наводимая в электромагните съема колебаний 6, подается на вход автогенератора 7, который подбирает частоту переменного напряжения, вновь подаваемого на электромагнит возбуждения колебаний 5, таким образом, чтобы амплитуда ЭДС, которая наводится в электромагните съема колебаний 6, была максимальной (то есть стержневой резонатор 4 совершал колебания на своей резонансной частоте). По этой максимальной частоте определяют резонансную частоту колебаний стержневого резонатора 4.
Для уменьшения постоянной составляющей выходного сигнала устройства на частотах, отличных от резонансной, и частичной компенсации температурного изменения характеристик электромагнитов 5 и 6 в конструкции устройства применена система компенсации фона выходного сигнала, состоящая из двух электромагнитов 23 и располагающаяся в кронштейне 22.
При действии вибрационной нагрузки две неподвижные вертикальные стойки 17 и 18 и подвижная Т-образная стойка 19, соединенные плоскими пружинами 14, 15 и 16, обеспечивают развязку рамочного корпуса 1 от объекта 21. Крепление двух неподвижных вертикальных стоек 17 и 18 к объекту 21, обеспечивающее большую жесткость конструкции частотного датчика линейных ускорений, и заполнение фигурных пазов 9 и 10 демпфирующим материалом обеспечивают амортизацию рамочного корпуса 1, тем самым достигается уменьшение влияния вибрационного воздействия на инерционную массу 2 и стержневой резонатор 4 и погрешности измерения частотного датчика линейных ускорений.
Выполнение основания 8, состоящего из трех частей в виде: двух неподвижных стоек вертикальных 17 и 18, крепящихся непосредственно к объекту 21, и расположенной между ними подвижной Т-образной стойки 19, соединенными между собой пружинами 14, 15, 16 плоскопараллельного подвеса обеспечивает надежность работы и увеличение точности частотного датчика линейных ускорений в условиях вибрационных воздействий при сохранении его габаритов и массы.
Таким образом, предлагаемое устройство представляет собой частотный датчик линейных ускорений, который позволяет измерять величину действующего линейного ускорения в направлении оси Y, и по сравнению с аналогами, обеспечивает уменьшение погрешности выходного сигнала и стабильности параметров при действии вибрационной нагрузки за счет изменения конструкции основания, которое выполняет роль амортизирующей опоры для рамочного корпуса, что обеспечивает уменьшение действия вибрации, так как основание является демпфирующим устройством, увеличение добротности колебательной системы и точности частотного датчика линейных ускорений, которая достигается путем уменьшения чувствительности к вибрационному ускорению.
Представленные данные свидетельствуют о выполнении при использовании заявляемого изобретения следующей совокупности условий:
- средство, воплощающее заявленное изобретение при его осуществлении, предназначено для использования в измерительной технике для измерений линейного ускорения;
- для заявленного устройства в том виде, в котором оно охарактеризовано в независимом пункте формулы изобретения, подтверждена возможность его осуществления;
- средство, воплощающее заявленное изобретение при его осуществлении, способно обеспечить повышение точности и надежности измерения линейного ускорения.
Следовательно, заявляемое изобретение соответствует условию "промышленная применимость".
| название | год | авторы | номер документа |
|---|---|---|---|
| ДАТЧИК ЛИНЕЙНЫХ УСКОРЕНИЙ | 2016 |
|
RU2650715C1 |
| ЧАСТОТНЫЙ ДАТЧИК ЛИНЕЙНЫХ УСКОРЕНИЙ | 2010 |
|
RU2436106C2 |
| СПОСОБ УМЕНЬШЕНИЯ ЧУВСТВИТЕЛЬНОСТИ ВИБРОЧАСТОТНОГО АКСЕЛЕРОМЕТРА К БОКОВОМУ УСКОРЕНИЮ | 2019 |
|
RU2718474C1 |
| ЧАСТОТНЫЙ МИКРОМЕХАНИЧЕСКИЙ АКСЕЛЕРОМЕТР | 2007 |
|
RU2377575C2 |
| ВИБРОЧАСТОТНЫЙ ДАТЧИК АБСОЛЮТНОГО ДАВЛЕНИЯ | 2017 |
|
RU2660621C1 |
| Частотный датчик ускорения | 1980 |
|
SU1000916A1 |
| ДВУХКОМПОНЕНТНЫЙ ВИБРОЧАСТОТНЫЙ ПРЕОБРАЗОВАТЕЛЬ УСКОРЕНИЯ | 2024 |
|
RU2836144C1 |
| ЛИНЕЙНЫЙ АКСЕЛЕРОМЕТР | 2024 |
|
RU2837037C1 |
| ВИБРОЧАСТОТНЫЙ МИКРОМЕХАНИЧЕСКИЙ АКСЕЛЕРОМЕТР | 2010 |
|
RU2442992C1 |
| ВИБРОЧАСТОТНЫЙ МИКРОМЕХАНИЧЕСКИЙ АКСЕЛЕРОМЕТР | 2010 |
|
RU2434232C1 |
Изобретение относится к области измерительной техники, а именно к измерительным элементам линейного ускорения. Сущность изобретения заключается в том, что основание частотного датчика линейных ускорений снабжено системой пружин плоскопараллельного подвеса, образованной пазами, выполненными в основании со стороны крепления датчика к объекту, симметричными пазами, выполненными с другой стороны основания, и фигурными пазами, а все пазы, разделяют основание на три части, соединенные между собой плоскими пружинами, причем одна часть расположена между двумя другими и к ней крепится рамочный корпус, две другие части крепятся к объекту. Технический результат - повышение точности измерения и стабильности параметров частотного датчика линейных ускорений при сохранении массы и габаритов прибора. 2 з.п. ф-лы, 4 ил.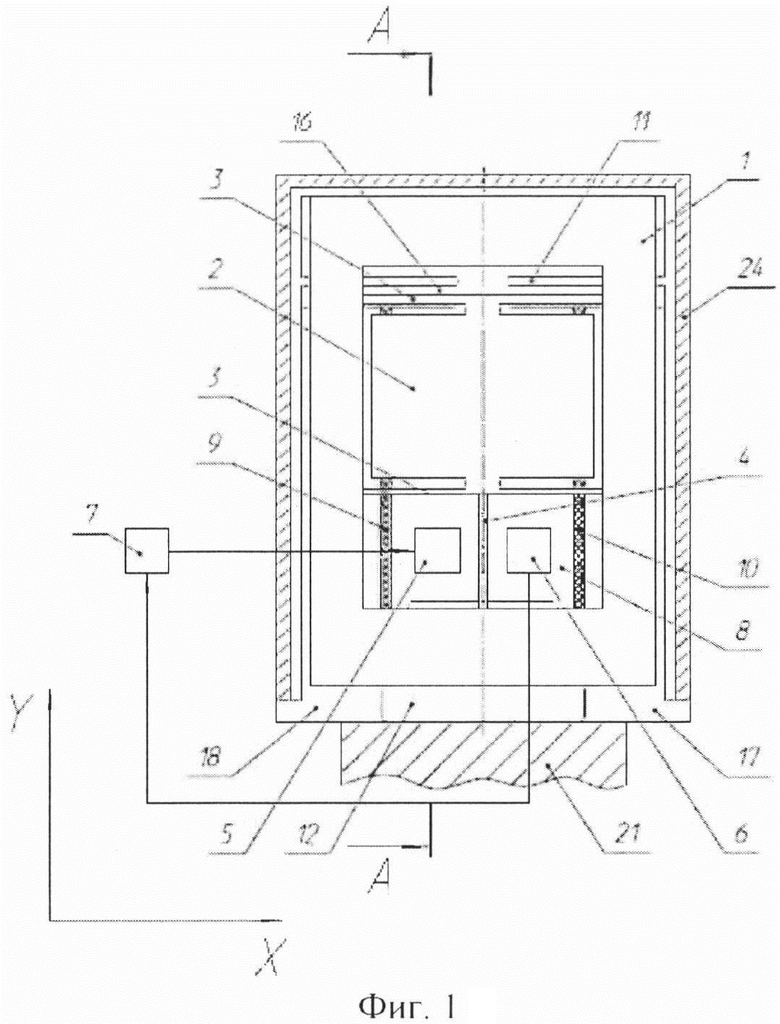
1. Частотный датчик линейных ускорений, содержащий основание, закрепленный на нем герметичный кожух, рамочный корпус, внутри которого размещены инерционная масса, соединенная через упругий подвес с рамочным корпусом, стержневой резонатор, соединенный с одной стороны с инерционной массой, а с другой стороны с рамочным корпусом, систему возбуждения и съема сигнала, систему компенсации фона выходного сигнала, а в основании выполнены образующие плоские пружины фигурные пазы, заполненные демпфирующим материалом, отличающийся тем, что основание снабжено системой пружин плоскопараллельного подвеса, образованной пазами, выполненными в основании со стороны крепления датчика к объекту, симметричными пазами, выполненными с другой стороны основания, и фигурными пазами, а все пазы разделяют основание на три части, соединенные между собой плоскими пружинами, причем одна часть расположена между двумя другими и к ней крепится рамочный корпус, две другие части крепятся к объекту.
2. Частотный датчик линейных ускорений по п. 1, отличающийся тем, что две части основания выполнены в виде двух неподвижных вертикальных стоек, крепящихся к объекту, между которыми расположена другая часть основания, выполненная в виде подвижной Т-образной стойки с выступами, на которых крепится рамочный корпус.
3. Частотный датчик линейных ускорений по п. 1 или 2, отличающийся тем, что в качестве демпфирующего материала, заполняющего фигурные пазы, используется компаунд КТ-102М.
| ДАТЧИК ЛИНЕЙНЫХ УСКОРЕНИЙ | 2016 |
|
RU2650715C1 |
| Линейный акселерометр | 1990 |
|
SU1781614A1 |
| Линейный акселерометр | 1978 |
|
SU670896A1 |
| Устройство для уравновешивания подвижного органа | 1989 |
|
SU1703288A1 |
| CN 105259370 A, 20.01.2016. | |||

