ССЫЛКА НА РОДСТВЕННЫЕ ЗАЯВКИ
[0001] По настоящей заявке испрашивается приоритет по предварительной заявке на выдачу патента США № 62/175,691, поданной 15 июня 2015 года, полное содержание которой включено в материалы настоящей заявки посредством ссылки.
УРОВЕНЬ ТЕХНИКИ
[0002] Варианты осуществления настоящего изобретения относятся к системам и способам отслеживания устойчивости кровли в условиях подземной разработки длинными забоями. По мере того, как врубовая машина системы для разработки длинными забоями проходит вперед и назад вдоль длины машины, механизированные крепи (PRS) поддерживают кровлю выработки над врубовой машиной. По мере того, как система для разработки продвигается в угольный пласт, кровля выработки разрушается и обрушается за механизированными крепями. Тем не менее, до тех пор, пока кровля выработки не обрушится, нагрузка, прикладываемая к PRS весом кровли выработки, может привести к потенциально опасным условиям как для оборудования для разработки, так и для рабочих внутри выработки.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
[0003] Различные варианты осуществления изобретения предлагают способы и системы для отслеживания устойчивости кровли в условиях подземной разработки длинными забоями. В одной из систем, данные о давлении на механизированной крепи и данные о положении врубовой машины для разработки длинными забоями принимаются с системы для разработки и отображаются с течением времени, используя цвета, чтобы представить давление, формируя карту давлений (например, "тепловую карту"), которая представляет величину давления, которое кровля прикладывает ко всей системе узлов PRS. Цветовой градиент используется, чтобы визуализировать изменение давления кровли вдоль длинного забоя, и линия, показывающая положение врубовой машины в системе для разработки, накладывается на карту давлений. Этот способ отображения позволяет операторам шахты визуализировать, когда и где произошли обрушения кровли, и изменять их цели и операции разработки, чтобы соответствовать наблюдаемым условиям кровли выработки.
[0004] В одном из вариантов осуществления, изобретение обеспечивает систему для разработки длинными забоями, включающую в себя множество механизированных крепей и электронный блок управления. Каждая механизированная крепь включает в себя управляемый гидравлический поршень, выполненный с возможностью приложения регулируемого опорного давления к кровле выработки. Электронный блок управления выполнен с возможностью приема данных с каждой механизированной крепи, указывающие на давление текучей среды в каждом соответствующем управляемом гидравлическом поршне, и чтобы отслеживать состояние кровли выработки на основании изменений в принятых данных в течение периода времени.
[0005] В другом варианте осуществления, изобретение обеспечивает способ отслеживания состояния кровли выработки, используя систему для разработки длинными забоями. Множество механизированных крепей расположены в ряд вдоль забоя выработки с возможностью приложения регулируемого опорного давления к кровле выработки. Врубовая машина также управляется с возможностью перемещения по забою выработки, врезаясь в забой выработки. С каждой механизированной крепи принимаются данные, указывающие на регулируемое опорное давление, прикладываемое к кровле выработки каждой отдельной механизированной крепью. Затем, графическая карта давлений формируется на основании данных, принимаемых с каждой механизированной крепи. Графическая карта давлений включает в себя множество параллельных линий отображения, каждая из которых предоставляет показание регулируемого опорного давления, прикладываемого к кровле выработки отдельной механизированной крепью в течение периода времени, и линию положения врубовой машины, показывающую положение врубовой машины относительно множества механизированных крепей в течение периода времени, наложенную на множество параллельных линий отображения. Состояние кровли выработки отслеживается на основании изменений в регулируемом опорном давлении, как показано на графической карте давлений. В некоторых вариантах осуществления, состояние кровли выработки отслеживается посредством обнаружения схожих по времени изменений в регулируемом опорном давлении, прикладываемом к кровле множеством соседних механизированных крепей, указывающих на событие обрушения кровли выработки. В других вариантах осуществления, работа системы для разработки длинными забоями регулируется на основании отслеживаемого состояния кровли выработки.
[0006] В еще одном варианте осуществления, изобретение обеспечивает систему управления для системы для разработки длинными забоями. Система управления включает в себя процессор и память, хранящую команды, которые выполняются процессором, чтобы управлять работой системы управления. Система управления управляет множеством механизированных крепей, расположенных в ряд вдоль забоя выработки, для приложения регулируемого опорного давления к кровле выработки. Система управления также управляет врубовой машиной для перемещения по забою выработки, врезаясь в забой выработки. Система управления принимает данные с каждой механизированной крепи, указывающие на регулируемое опорное давление, прикладываемое каждой отдельной механизированной крепью к кровле выработки, и формирует графическую карту давлений на основании принятых данных. Графическая карта давлений включает в себя множество параллельных линий отображения, каждая из которых предоставляет показание регулируемого опорного давления, прикладываемого к кровле выработки отдельной механизированной крепью в течение периода времени, и линию положения врубовой машины, показывающую положение врубовой машины относительно множества механизированных крепей в течение периода времени, наложенную на множество параллельных линий отображения. Система управления отслеживает состояние кровли выработки на основании изменений в регулируемом опорном давлении, как показано на графической карте давлений. В некоторых вариантах осуществления, система управления отслеживает состояние кровли выработки посредством обнаружения схожих по времени изменений в регулируемом опорном давлении, прикладываемом к кровле выработки на множестве соседних механизированных крепей, указывающих на событие обрушения кровли выработки. В других вариантах осуществления, работа системы для разработки длинными забоями регулируется посредством системы управления на основании отслеживаемого состояния кровли выработки.
[0007] Другие аспекты изобретения станут очевидными посредством рассмотрения подробного описания и прилагаемых чертежей.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0008] Фиг. 1 - общий вид механизированной крепи (PRS) согласно одному из вариантов осуществления.
[0009] Фиг. 2 - общий вид системы для разработки длинными забоями, включающей в себя ряд механизированных крепей по фиг. 1.
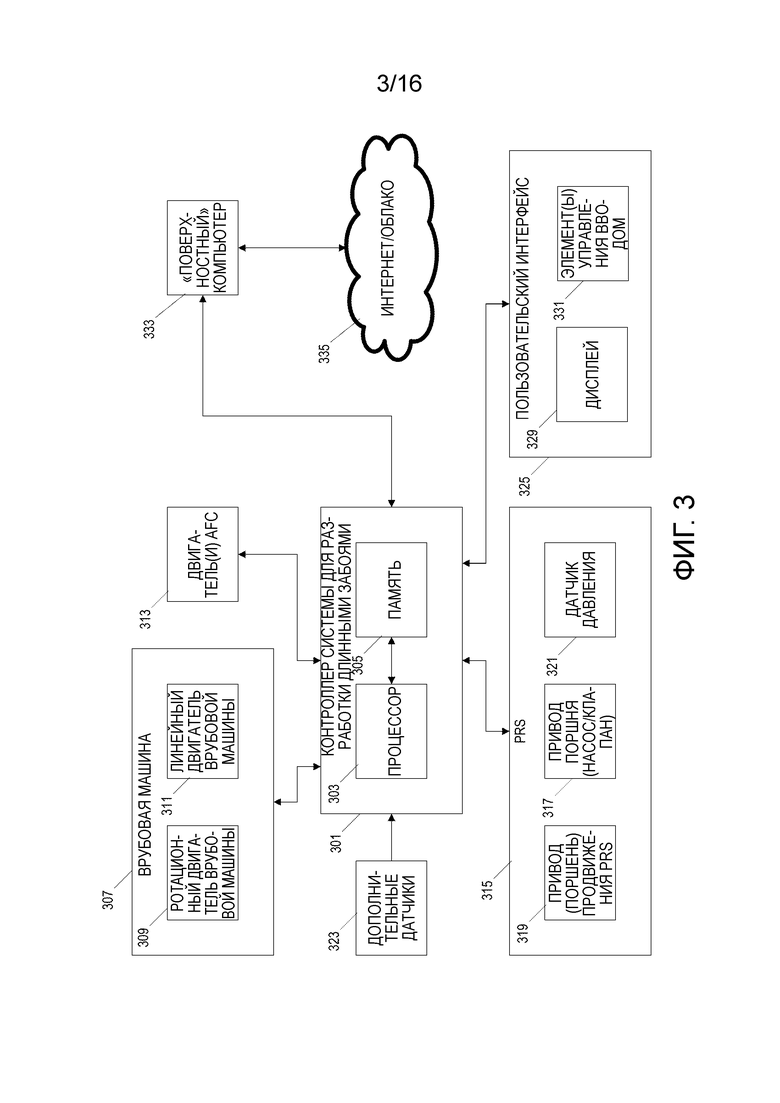
[0010] Фиг. 3 - структурная схема системы управления для системы для разработки длинными забоями по фиг. 2.
[0011] Фиг. 4A - вид сбоку в вертикальной проекции системы для разработки длинными забоями по фиг. 2, на котором врубовая машина проходит через механизированную крепь.
[0012] Фиг. 4B - вид сбоку в вертикальной проекции системы для разработки длинными забоями по фиг. 2 после того, как врубовая машина прошла через механизированную крепь, и механизированная крепь была перемещена в направлении врубовой машины.
[0013] Фиг. 5 - блок-схема последовательности операций способа для управления механизированной крепью в системе для разработки длинными забоями по фиг. 2 по мере перемещения врубовой машины вдоль забоя выработки.
[0014] Фиг. 6 - карта давлений, формируемая и отображаемая на экране дисплея системы для разработки по фиг. 3, показывающая положение врубовой машины и давление на каждой механизированной крепи в течение периода времени.
[0015] Фиг. 7A - участок карты давлений, отображаемый, используя цветовое кодирование, чтобы представить давления на каждой механизированной крепи в системе для разработки по фиг. 2.
[0016] Фиг. 7B - такой же участок карты давлений, как и на фиг. 7A, отображаемый, используя альтернативный формат плотности давлений, чтобы представить давления на каждой механизированной крепи в системе для разработки по фиг. 2.
[0017] Фиг. 7C - такой же участок карты давлений, как и на фиг. 7A, отображаемый, чтобы показать перепад давления, указывающий на быстрые изменения в давлении на каждой механизированной крепи в системе для разработки по фиг. 2.
[0018] Фиг. 8 - карта давлений, иллюстрирующая первый пример обрушения кровли выработки по мере перемещения врубовой машины по забою выработки.
[0019] Фиг. 9 - карта давлений, иллюстрирующая второй пример обрушения кровли выработки, в котором скорость, с которой обрушение кровли выработки распространяется по забою выработки, отстает от скорости врубовой машины.
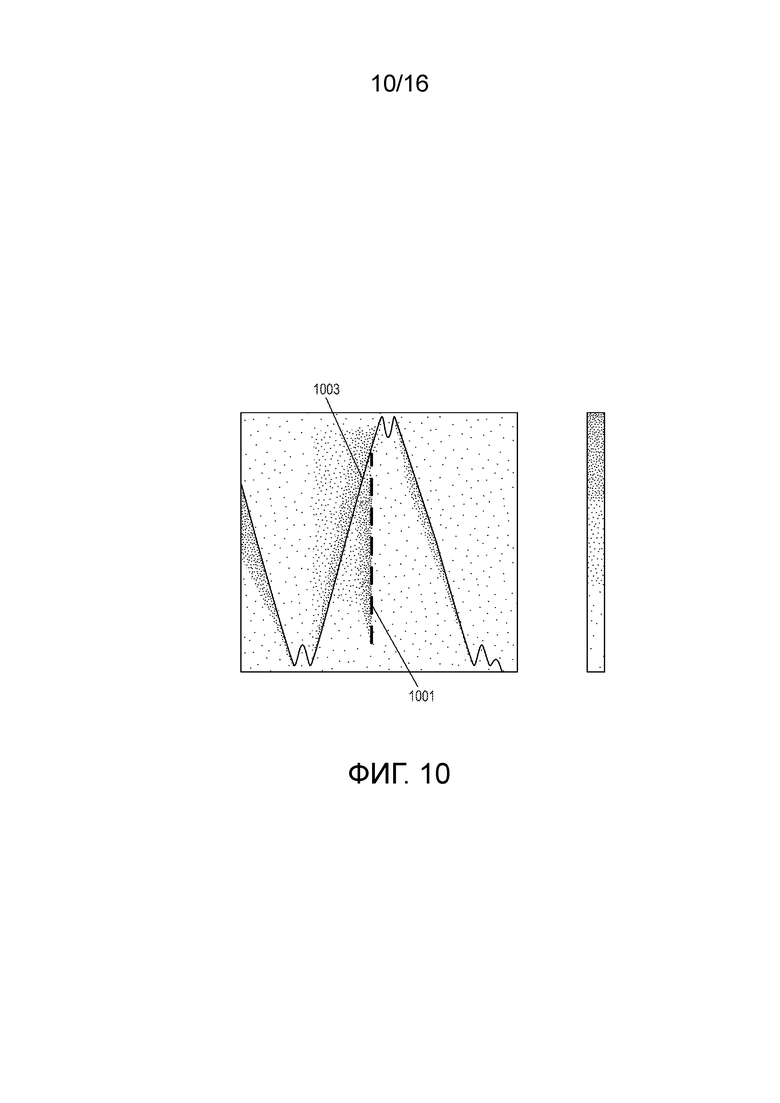
[0020] Фиг. 10 - карта давлений, иллюстрирующая третий пример обрушения кровли выработки, в котором внезапное обрушение кровли выработки происходит на нескольких механизированных крепях.
[0021] Фиг. 11 - блок-схема последовательности операций способа для регулировки работы системы для разработки длинными забоями по фиг. 2 на основании наблюдаемой и обнаруженной информации об обрушении кровли.
[0022] Фиг. 12A - блок-схема последовательности операций альтернативного способа для обнаружения обрушения кровли выработки.
[0023] Фиг. 12B - блок-схема последовательности операций способа для обнаружения состояния, в котором врубовая машина совершила множество проходов вдоль забоя выработки без обрушения кровли выработки за механизированными крепями.
[0024] Фиг. 13 - блок-схема последовательности операций способа для обнаружения состояния, в котором состояния давления кровли изменились, в то время как врубовая машина находится в нерабочем состоянии.
[0025] Фиг. 14 - графический вывод, отображаемый на экране системы для разработки длинными забоями по фиг. 3, иллюстрирующий как карту давлений, прикладываемых к каждой механизированной крепи в течение периода времени, так и основанную на времени гистограмму, иллюстрирующую относительное количество механизированных крепей, которые находятся в состоянии порога мощности или близки к нему.
[0026] Фиг. 15 - мгновенная гистограмма, иллюстрирующая относительное количество механизированных крепей, которые находятся в состоянии порога мощности или близки к нему, в системе для разработки длинными забоями по фиг. 2.
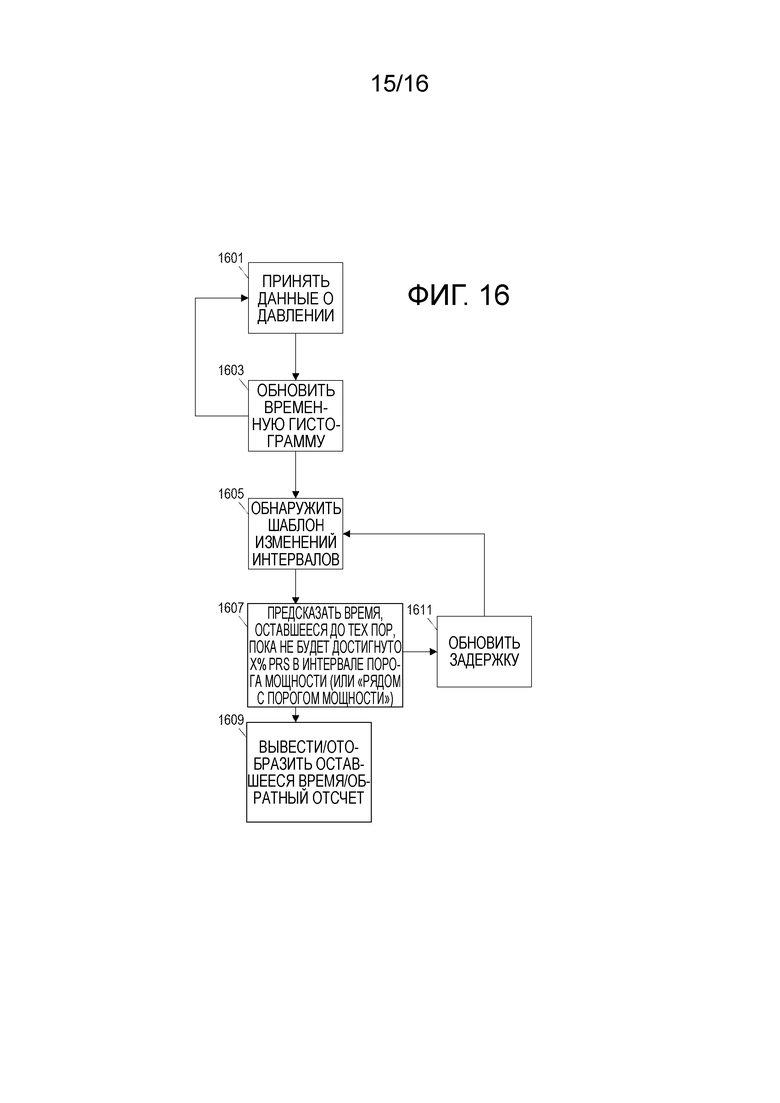
[0027] Фиг. 16 - блок-схема последовательности операций способа для предсказывания количества времени, оставшегося до тех пор, пока определенное количество PRS не достигнет состояния порога мощности (или состояния рядом с порогом мощности).
[0028] Фиг. 17 - блок-схема последовательности операций способа для отслеживания и обнаружения аномальных состояний кровли выработки во время регулировки отдельных PRS в течение цикла LAS.
ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНЫХ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
[0029] Перед подробным описанием каких-либо вариантов осуществления изобретения, следует понимать, что изобретение не ограничено в своем применении деталями конструкции и компоновкой компонентов, изложенных в последующем описании или проиллюстрированных на последующих чертежах. Изобретение является допускающим другие варианты осуществления и осуществление на практике или выполнение различными способами. К тому же, следует понимать, что фразеология и терминология, используемые в материалах настоящей заявки, предназначены для целей описания и не должны рассматриваться в качестве ограничивающих. Использование терминов "включающий в себя", "содержащий" или "имеющий" и их вариантов в материалах настоящей заявки подразумевается охватывающим элементы, перечисленные после них, и их эквиваленты, а также дополнительные элементы. Термины "установленный", "соединенный" и "связанный" используются в широком смысле и охватывают как непосредственную, так и опосредованную установку, соединение и связывание. Кроме того, термины "соединенный" и "связанный" не ограничены физическими или механическими соединениями или связями, и могут включать в себя электрические соединения или связи, прямые или непрямые. К тому же, электронные сообщения и уведомления могут выполняться с использованием любого известного средства, в том числе, непосредственных соединений, беспроводных соединений, и т. д.
[0030] Стоит отметить, что множество основанных на аппаратных средствах и программном обеспечении устройств, а также множество разных структурных компонентов могут использоваться для реализации изобретения. Более того, и как описано в последующих абзацах, конкретные конфигурации, проиллюстрированные на чертежах, предназначены для приведения примера вариантов осуществления изобретения, и что возможны другие альтернативные конфигурации. Термины "процессор", "центральный процессор", и "ЦП (CPU)" являются взаимозаменяемыми, если не указано иное. Если термины "процессор", или "центральный процессор", или "ЦП" используются для обозначения блока, выполняющего конкретные функции, следует понимать, что, если не указано иное, эти функции могут быть выполнены одиночным процессором или множеством процессоров, расположенных в любой форме, включающей в себя параллельные процессоры, последовательные процессоры, тандемные процессоры или облачные обрабатывающие/вычислительные конфигурации.
[0031] Фиг. 1 иллюстрирует механизированную крепь (PRS) 100 для разработки длинными забоями. PRS, такие как PRS 100, используются для поддержки кровли выработки (такой как, например, угольная выработка) над врубовой машиной по мере прохождения врубовой машины по забою разрабатываемого материала (как обсуждается более подробно ниже). PRS 100 включает в себя несущее перекрытие 101 механизированной крепи и пару управляемых гидравлических цилиндров 103, расположенных между несущим перекрытием 101 и основанием 105. Управляемая работа гидравлических цилиндров 103 поднимает и опускает перекрытие 101 относительно основания 105 и обеспечивает давление, чтобы поддерживать положение перекрытия 101 на кровле выработки.
[0032] Фиг. 2 иллюстрирует пример системы 200 для разработки длинными забоями, включающей в себя ряд PRS 201, расположенных в целом в линейном массиве. Система 200 для разработки длинными забоями также включает в себя врубовую машину 203, расположенную и управляемую с возможностью перемещения вдоль ряда PRS 201. По мере перемещения врубовой машины 203 через ряд PRS 201, врубовая машина 203 вращается, чтобы врезаться в материал забоя выработки. Покрытый броней конвейер (AFC) 205 также расположен вдоль ряда PRS 201 под врубовой машиной 203. По мере того, как врубовая машина 203 врезается в забой выработки, срезанный материал падает на AFC 205 и перемещается вдоль AFC 205 в направлении консольного перегружателя 207, который затем перемещает срезанный материал в направлении поверхности и наружу из области добычи. Врубовая машина 203 и AFC 205 присоединены к консольному перегружателю 207, так что, после того, как врубовая машина 203 завершает режущий проход вдоль забоя выработки, врубовая машина 203 и AFC 205 перемещается вдаль от ряда PRS 201 и в направлении забоя выработки, с тем чтобы врубовая машина 203 могла начать другой режущий проход по забою выработки.
[0033] В различных компоновках и реализациях, каждый из отдельных компонентов системы 200 для разработки длинными забоями может управляться своим собственным внутренним электронным контроллером. В некоторых из таких реализаций, эти многочисленные электронные контроллеры также сконфигурированы, чтобы взаимодействовать друг с другом, например, через проводную или беспроводную сеть устройства или шину связи, чтобы координировать работу отдельных компонентов. В качестве альтернативы, компоненты системы 200 для разработки длинными забоями могут управляться центральной системой управления разработкой длинными забоями, которая посылает команды и сигналы управления на контроллеры отдельных компонентов и/или предоставляет сигналы управления напрямую на рабочие компоненты, чтобы обеспечивать координированную работу системы 200 для разработки длинными забоями.
[0034] В примере по фиг. 3, контроллер 301 системы для разработки длинными забоями включает в себя процессор 303 и память 305. Память 305 хранит команды, которые исполняются процессором 303, чтобы управлять работой контроллера 301 системы для разработки длинными забоями. Контроллер 301 системы для разработки длинными забоями с возможностью обмена данными связан с врубовой машиной 307 и предоставляет сигналы и/или команды, чтобы управлять работой ротационного двигателя 309 врубовой машины и линейного двигателя 311 врубовой машины, который перемещает режущий инструмент врубовой машины через ряд PRS вдоль забоя выработки. В некоторых реализациях, врубовая машина 307 включает в себя локальный контроллер врубовой машины (не изображен), который взаимодействует с контроллером 301 системы для разработки длинными забоями, и, в свою очередь управляет работой ротационного двигателя 309 врубовой машины и линейного двигателя 311 врубовой машины. В других реализациях, контроллер 301 системы для разработки длинными забоями передает сигналы управления напрямую на ротационный двигатель 309 врубовой машины и линейный двигатель 311 врубовой машины. Схожим образом, контроллер 301 системы для разработки длинными забоями также с возможностью обмена данными связан с двигателями 313 AFC конвейерной системы, и управляет работой двигателей 313 AFC либо напрямую, либо через один или более локальных контроллеров ленты/дробилки.
[0035] Контроллер 301 системы для разработки длинными забоями также с возможностью обмена данными связан с каждым отдельным PRS 315 и управляет работой привода 317 поршня, чтобы поднимать или опускать перекрытие PRS 315. В данном примере, насосная станция (не изображена) расположена удаленно от ряда PRS. Насосная станция присоединена к ряду PRS посредством системной линии, которая обеспечивает сжатую гидравлическую текучую среду для ряда PRS, и обратной линии. Насосной станцией управляют, чтобы поддерживать давление в системной линии. В данном примере, привод 317 поршня каждой отдельной PRS 315 включает в себя клапан соленоидного типа, который управляемым образом открывает цилиндр PRS к обратной линии, чтобы управляемым образом снизить давление в цилиндре (например, опустить PRS), и к системной линии, чтобы заполнить цилиндр PRS сжатой текучей средой, тем самым повышая давление текучей среды внутри цилиндра и, в некоторых случаях, поднимая PRS. Приводной механизм 317 поршня для каждой отдельной PRS 315 также включает в себя "обратный клапан" (то есть, клапан сброса давления), который автоматически открывается в атмосферу и высвобождает гидравлическую текучую среду, чтобы снизить давление внутри цилиндра, когда давление текучей среды внутри цилиндра превышает пороговое значение.
[0036] Несмотря на то, что, в примере по фиг. 3, одна насосная станция обеспечивает системную и обратную линию для всех PRS в системе для разработки длинными забоями, и привод 317 поршня включает в себя клапан (или клапаны), регулирующие давление между отдельной PRS 315 и удаленно расположенной насосной станцией, в других реализациях, каждый привод 317 поршня для каждой отдельной PRS 315 мог бы включать в себя управляемую насосную систему, которая накачивает гидравлическую текучую среду в поршень только отдельной PRS 315, чтобы поднимать перекрытие PRS 315 (или чтобы повышать давление, прикладываемое перекрытием к кровле выработки). Более того, несмотря на то, что компонент обратного клапана в данном примере описан в виде механического клапана, который открывается автоматически, когда внутреннее давление текучей среды превышает пороговое значение, в некоторых реализациях, клапан обратной линии привода 317 поршня управляется контроллером, чтобы работать в качестве "обратного клапана".
[0037] Контроллер 301 системы для разработки длинными забоями в примере по фиг. 3 также координирует работу привода 319 продвижения PRS для каждой отдельной PRS 315. Работа привода 319 продвижения PRS вызывает продвижение PRS в направлении забоя выработки после того, как врубовая машина проходит через PRS 315 (как более подробно описано ниже). В некоторых реализациях, привод 319 продвижения PRS включает в себя управляемый гидравлический поршень, связывающий PRS с AFC. После опускания перекрытия PRS, поршень втягивается и тянет PRS в направлении AFC и врубовой машины. В некоторых из таких реализаций, управляемый гидравлический поршень привода 319 продвижения PRS также работает, чтобы продвигать врубовую машину и AFC в направлении забоя выработки, после того, как PRS устанавливают в новое положение на кровле выработки посредством расширения гидравлического поршня и толкания врубовой машины и AFC в направлении забоя выработки.
[0038] Контроллер 301 системы для разработки длинными забоями дополнительно выполнен, чтобы принимать значение давления с каждой PRS 315, указывающее на давление, прикладываемое между перекрытием PRS и кровлей выработки. В примере по фиг. 3, каждая PRS 315 включает в себя датчик 321 давления, который отслеживает давление текучей среды внутри цилиндра и управляет клапаном(ами) PRS, соответственно, чтобы регулировать давление текучей среды, принятое с насосной станции или вернувшееся на нее. Тем не менее, в других вариантах осуществления, система может быть выполнена, чтобы косвенно определять давление текучей среды, используя другие механизмы. Например, в реализациях, в которых каждая отдельная PRS 315 оборудована своим собственным выделенным гидравлическим насосом, давление текучей среды внутри цилиндра поршня могло бы быть оценено на основании текущей передаваемой мощности насоса. Как более подробно обсуждается ниже, некоторые реализации системы 301 управления разработкой длинными забоями выполнены с возможностью отслеживания состояния кровли выработки, и чтобы регулировать работу системы 200 для разработки длинными забоями на основании значений давления, принятых с каждой PRS 315.
[0039] Вдобавок к значениям давления, принятым с каждой PRS 315, система 301 управления разработкой длинными забоями также с возможностью обмена данными связана с дополнительными датчиками 323 и выполнена, чтобы принимать дополнительную информацию, относящуюся к текущим условиям/работе системы 200 для разработки длинными забоями, включающую в себя, например, скорость, положение, и т. д. компонентов системы для разработки длинными забоями и условия в самой выработке, включающие в себя, например, температуру и влажность. Эта и другая информация могут выводиться контроллером 301 системы для разработки длинными забоями на пользовательский интерфейс 325. Пользовательский интерфейс 325 расположен рядом с оператором системы для разработки длинными забоями, в некоторых реализациях, внутри самой выработки, и включает в себя графический дисплей 329 и один или более элементов 331 управления вводом.
[0040] Контроллер 301 системы для разработки длинными забоями также с возможностью обмена данными связан с одной или более компьютерными системами, расположенными снаружи от выработки в местоположении на поверхности (например, "поверхностным компьютером" 333). В некоторых реализациях, поверхностный компьютер 333 также с возможностью обмена данными связан с сетью интернет или дрогой сетью/облачными ресурсами 335, чтобы обмениваться информацией об условиях/операциях разработки с другими расположенными удаленно компьютерными системами. Например, поверхностный компьютер 33 может быть выполнен, чтобы связываться с централизованным сервером, который собирает рабочие данные разработки из множества разных выработок, и использует собранную информацию, чтобы оптимизировать и улучшить эффективность разработки.
[0041] Поверхностная часть системы управления может включать в себя один или более серверов или других компьютеров, которые электрически соединены друг с другом и с контроллером 301 системы для разработки длинными забоями посредством компьютерной сети или сетей. Серверы, компьютеры и контроллер 301 системы для разработки длинными забоями выполнены с возможностью обмена данными, используя один или более сетевых протоколов, включающих в себя, например, TCP/IP (протокол управления передачей), UDP (пользовательский протокол данных), диспетчерское управление и сбор данных (SCADA), и OLE для управления технологическими процессами (OPC). Серверы и компьютер также могут быть соединены с внешней глобальной сетью, включающей в себя, например, корпоративную сеть или сеть интернет 335. В некоторых из таких реализаций, контроллер 301 системы для разработки длинными забоями передает данные о событиях, сигналы тревоги и данные датчиков с системы для разработки на серверы и компьютеры, используя один или более способов. Например, контроллер 301 системы для разработки длинными забоями может передавать данные напрямую в базу данных на поверхности (например, базу данных MySQL). В качестве альтернативы или дополнительно, пакеты UDP, принятые контроллером 301 системы для разработки длинными забоями с разных компонентов и датчиков системы 200 для разработки длинными забоями, преобразуются в данные OPC и объединяются в сплошные файлы, которые затем передаются на поверхностный компьютер 333. Затем файлы могут сохраняться локально или передаваться в центральную базу данных в другом местоположении через сеть интернет или другую сеть 335. Данные, сохраненные на поверхности, могут затем использоваться, чтобы генерировать отчеты, используемые для проектирования и оптимизации планов будущей разработки.
[0042] Фиг. 4A и 4B иллюстрируют работу системы 200 для разработки длинными забоями во время разработки угля. Как обсуждалось выше, врубовая машина 203 перемещается через каждую PRS 100, врезаясь в угольный забой 405 вдоль длинного забоя. После каждого режущего прохода, врубовая машина 203 продвигается дальше в угольный забой 405. С каждым последующим режущим проходом, каждая отдельная PRS 100 также продвигается в направлении угольного забоя 405, тем самым продолжая поддерживать кровлю 401 выработки над врубовой машиной 203, в то время как кровле выработки позволяют обрушаться за PRS 100 (то есть, с противоположной стороны от врубовой машины 203). Эта обрушенная часть кровли 401 выработки за PRS 100 называется завалом 403.
[0043] Как показано на фиг. 4A, каждая отдельная PRS 100 расположена с зазором между PRS 100 и путем врубовой машины 203 перед тем, как врубовая машина 203 проходит через PRS 100. Когда врубовая машина 203 проходит через каждую отдельную PRS 100, PRS 100 опускают и продвигают в направлении угольного забоя 405. Как показано на фиг. 4B, PRS 100 был перемещен, тем самым устранив зазор между PRS 100 и путем врубовой машины 203. Как проиллюстрировано на фиг. 4B, кровля 401 выработки еще не обрушилась сразу за PRS 100. Тем не менее, по мере того, как большее количество PRS продвигаются вперед в направлении угольного забоя 405, неподдерживаемый вес кровли за рядом PRS возрастает до тех пор, пока кровля не обрушится.
[0044] Фиг. 5 иллюстрирует, как контроллер 301 системы для разработки длинными забоями управляет каждой отдельной PRS 100, чтобы переместить ее в направлении угольного забоя 405, как проиллюстрировано на фиг. 4A и 4B. После того, как PRS установлена, чтобы поддерживать кровлю выработки (этап 501), контроллер 301 системы для разработки длинными забоями продолжает отслеживать давление на каждой отдельной PRS и определять, превышает ли это давление максимальный порог мощности (этап 503). Если порог мощности превышен, запускается "обратный клапан" PRS. Запуск обратного клапана защищает оборудование для разработки посредством опускания PRS и снижения давления (этап 505). Тем не менее, если максимальный порог мощности не превышен и обратный клапан не был запущен, PRS продолжает поддерживать кровлю выработки до тех пор, пока врубовая машина не пройдет через PRS (этап 507). Как только врубовая машина проходит через PRS, контроллер системы для разработки длинными забоями ожидает в течение определенного периода задержки (этап 509). В данном примере, период задержки определен, как расстояние, которое должна пройти врубовая машина вдоль своего пути после прохождения конкретной PRS. Как только задержка истекает (то есть, как только врубовая машина перемещается на определенное расстояние от PRS), контроллер 301 системы для разработки длинными забоями опускает PRS (этап 511), продвигает PRS в направлении угольного забоя (этап 513), и устанавливает PRS, чтобы поддерживать кровлю выработки в новом местоположении (этап 515). В идеале, часть кровли выработки за PRS затем обрушится, после того, как PRS устанавливают в ее новое местоположение. В данном примере, цикл опускания-продвижения-установки (LAS) PRS инициируется, когда расстояние между врубовой машиной и PRS достигает определенного порогового расстояния. Тем не менее, в других реализациях, задержка определена в терминах периода времени, с тем чтобы цикл LAS начинался через определенный период времени после того, как врубовая машина прошла через отдельную PRS.
[0045] Процесс, проиллюстрированный на фиг. 5, повторяется для каждой отдельной PRS и для каждого режущего прохода, который делает врубовая машина вдоль угольного забоя. По существу, каждая отдельная PRS продвигается по очереди по мере перемещения врубовой машины вдоль ее пути на каждом отдельном режущем проходе. Схожим образом, в идеальных условиях, обрушение кровли выработки будет распространяться за каждой отдельной PRS после того, как каждую PRS установят в ее новое положение. Таким образом, в некоторых обстоятельствах, перемещение врубовой машины вдоль угольного забоя, поочередное продвижение каждой PRS и распространение обрушения кровли за PRS будут проявляться в виде сдвинутых по фазе, в целом периодических последовательностей. Тем не менее, этот идеальный сдвиг по фазе происходит не всегда, и, если кровля выработки не обрушается за PRS, вес, поддерживаемый каждой PRS, будет продолжать возрастать по мере продвижения PRS, и неподдерживаемая часть кровли выработки за PRS будет продолжать расти. В некоторых ситуациях, это дополнительное давление может вызвать обрушение угольного забоя 405 в направлении системы для разработки, создавая пустоту перед машиной. В других ситуациях, вес неподдерживаемой кровли выработки может продолжать возрастать до тех пор, пока не произойдет внезапное обрушение большого участка кровли выработки. В других ситуациях, вес кровли выработки на отдельной PRS может возрастать за пределы максимального порога мощности, тем самым побуждая обратный клапан сбрасывать давление и опускать PRS, чтобы предотвращать повреждение оборудования для разработки. Если одна или более PRS полностью опустится из-за чрезмерного давления, система управления не будет способна управляемым образом опускать перекрытие PRS от кровли выработки, и, таким образом, не будет способна продвигать эту PRS в направлении забоя выработки, с тем чтобы ее можно было повторно установить в новое местоположение. Если система для разработки длинными забоями больше не способна продвигать PRS в направлении угольного забоя из-за сброса давления через обратный клапан, может понадобиться приостановить или отложить операции по разработке.
[0046] В некоторых реализациях, система 200 для разработки длинными забоями по фиг. 2 и контроллер 301 системы для разработки длинными забоями по фиг. 3 выполнены, чтобы непрерывно отслеживать давления, прикладываемые к каждой PRS, чтобы отслеживать обрушения кровли выработки, и, в некоторых таких реализациях, регулировать работу системы 200 для разработки длинными забоями, чтобы улучшить распространение обрушений кровли выработки. Фиг. 6 иллюстрирует пример "карты давлений", сформированной контроллером 301 системы для разработки длинными забоями на основании значений давления, принятых с каждой PRS в системе 200 для разработки длинными забоями. В некоторых реализациях, эта карта давлений показана на дисплее 329 пользовательского интерфейса 325 и анализируется, чтобы определить качественную и количественную информацию касательно обрушений кровли выработки.
[0047] Карта давлений по фиг. 6 включает в себя ряд горизонтальных линий с цветовым кодом, каждая из которых соответствует отдельной PRS в ряду PRS. Цвет каждой отдельной линии меняется, чтобы показывать давление на каждой отдельной PRS в течение периода времени. Например, в некоторых реализациях, цвет отдельной линии будет становиться темнее или ярче при возрастании давления на соответствующей отдельной PRS, и будет становиться светлее при снижении давления на соответствующей PRS. Сплошная линия 601 накладывается на карту давлений, чтобы показать положение врубовой машины в течение того же периода времени. Точка, в которой сплошная линия 601 проходит через отдельную линию с цветовым кодом, соответствующую отдельной PRS, показывает момент времени, в который врубовая машина физически перемещается через эту PRS в выработке.
[0048] В примере по фиг. 6, карта давлений иллюстрирует данные о давлении PRS и соответствующее положение врубовой машины для десяти режущих проходов вдоль угольного забоя - каждый режущий проход врубовой машины обозначен римской цифрой I-X. При отображении на дисплее 329 пользовательского интерфейса 325, формируемая карта давлений предоставляет информацию оператору системы для разработки длинными забоями касательно состояния кровли выработки. В некоторых реализациях, контроллер 301 системы для разработки длинными забоями дополнительно выполнен, чтобы анализировать формируемую карту давлений, чтобы обнаруживать и оценивать различные условия кровли выработки, которые затем могут использоваться с возможностью регулирования работы системы 200 для разработки длинными забоями.
[0049] В некоторых реализациях, в идеальных условиях, часть кровли выработки за каждой отдельной PRS будет обрушаться, как только PRS поднимут и "установят" в новое положение (или вскоре после этого). Например, во время первого режущего прохода (Проход I на фиг. 6), судя по всему, давления на забое выработки падают однородно по мере прохождения линии 601 врубовой машины. Это указывает на постепенное обрушение кровли выработки, которое следует рядом с движением врубовой машины и циклом LAS каждой PRS.
[0050] Тем не менее, посредством третьего режущего прохода, (Проход III на фиг. 6), по меньшей мере часть кровли выработки не обрушается по завершении цикла LAS. Вместо этого, после того, как PRS повторно устанавливают в новое положение, давление текучей среды в PRS быстро возрастает до своего уровня перед LAS. Более того, вместо следования по фазе вместе с циклом LAS, часть кровли выработки обрушается между третьим режущим проходом (Проход III) и четвертым режущим проходом (Проход IV). Это событие отложенного обрушения является видимым и выявляемым на карте давлений по фиг. 6 в виде ряда падений давления в соседних PRS, формирующих в целом прямую линию 603 на карте давлений. Эта видимая "линия" 603 указывает на внезапные изменения в давлении на нескольких соседних PRS в системе для разработки длинными забоями и в целом показывает, что кровля выработки постепенно обрушалась за группой PRS, тем самым постепенно снижая давление на каждой соответствующей PRS по мере распространения обрушения, хоть и со смещенной по времени задержкой от цикла LAS.
[0051] Пример по фиг. 6 также показывает вторую видимую "линию" 605 между пятым режущим проходом (Проход V) и шестым режущим проходом (Проход VI). Третья видимая линия 607, указывающая на событие обрушения кровли, также присутствует между девятым режущим проходом (Проход IX) и десятым режущим проходом (Проход X) врубовой машины. Как обсуждается более подробно ниже, этот пример показывает ряд аномальных обрушений кровли, в некоторых случаях, с множеством режущих проходов врубовой машины, происходящих между событиями обрушения кровли.
[0052] Пример по фиг. 6 иллюстрирует карту давлений с цветовым кодом, на которой давления на каждой PRS проиллюстрированы, используя изменения в цвете. Тем не менее, другие реализации могут использовать другие форматы отображения, чтобы показывать карту давлений на дисплее 329 пользовательского интерфейса 325. Фиг. 7A, 7B, и 7C иллюстрируют три примера возможных механизмов/форматов отображения. Пример по фиг. 7A показывает карту давлений, иллюстрирующую давления PRS и соответствующее положение врубовой машины на двух режущих проходах, используя такую же схему отображения с цветовым кодом, как в примере по фиг. 6 (продемонстрировано в этом раскрытии, используя серую шкалу). Фиг. 7B иллюстрирует альтернативный формат для отображения значений давления для тех же двух режущих проходов, используя плотность зернистости - в частности, относительная плотность отметок зернистости возрастает с увеличением давления на PRS, и более низкая плотность зернистости, соответственно, показывает более низкое давление на PRS. Этот альтернативный формат отображения может быть особенно полезным при использовании монохромного (например, черного и белого) устройства отображения.
[0053] Наконец, фиг. 7C иллюстрирует другой формат отображения для тех же двух режущих проходов, как проиллюстрировано на фиг. 7A и 7B. А примере по фиг. 7B, вместо иллюстрации абсолютного давления на каждой PRS, график иллюстрирует относительные изменения в давлении. Более точно, цветные пиксели обозначают моменты времени, в которые изменение в давлении на каждой отдельной PRS превышало пороговое значение. В некоторых реализациях, дифференциальная карта давлений включает в себя схему цветового кодирования, чтобы продемонстрировать относительную величину изменения давления. Тем не менее, в других реализациях, может быть сформирована монохромная дифференциальная карта давлений, которая просто показывает каждый отдельный пиксель, соответствующий изменению в давлении на каждой PRS, которое превышает определенное дифференциальное пороговое давление.
[0054] В некоторых реализациях, контроллер 301 системы для разработки длинными забоями выполнен, чтобы показывать только один тип карты давлений на дисплее 329. Тем не менее, в других реализациях, контроллер 301 системы для разработки длинными забоями может быть выполнен, чтобы одновременно отображать несколько разных карт давлений, или чтобы принимать выбор от пользователя, обозначающий тип карты давлений, который должен быть показан на дисплее 329.
[0055] Как обсуждалось выше, карта давлений, сформированная контроллером 301 системы для разработки длинными забоями, может быть дополнительно проанализирована, чтобы обеспечить качественную информацию касательно каждого отдельного события обрушения кровли. В некоторых реализациях, эта качественная информация затем используется контроллером 301 системы для разработки длинными забоями с возможностью регулирования работы системы 200 для разработки длинными забоями. Фиг. 8-10 иллюстрируют различные примеры событий обрушения кровли выработки, как представлено на картах давлений, сформированных контроллером 301 системы для разработки длинными забоями.
[0056] Пример по фиг. 8 показывает обрушение кровли выработки, которое обычно следует за движением врубовой машины и, таким образом, продвижением PRS. Линия 801, проявляемая данными о давлении, показывающими распространяющееся обрушение кровли выработки, не точно параллельна соответствующей части линии 803, представляющей положение врубовой машины, и, следовательно, распространяющееся обрушение кровли выработки не точно "смещено по фазе" от движения врубовой машины. Более того, временное расстояние между линией 803 положения врубовой машины и линией 801 выявляемого обрушения кровли предполагает, что кровля выработки может не обрушаться сразу после цикла LAS, как было бы предпочтительно.
[0057] В примере по фиг. 9, вдобавок к проявлению временной разницы между линией 901 обрушения кровли и линией 903 положения врубовой машины, разница между наклоном линии 901 обрушения кровли и частью линии 903 положения врубовой машины, представляющей положение врубовой машины, еще больше. Таким образом, в некоторых реализациях и в некоторых условиях разработки, контроллер 301 системы для разработки длинными забоями может быть выполнен, чтобы обнаруживать эту разницу и качественно определять, что событие обрушения кровли выработки управляется более стабильно посредством работы системы 200 для разработки длинными забоями в примере по фиг. 8 и, получая данные о давлении в примере по фиг. 9, может выполнять регулировки в работе системы 200 для разработки длинными забоями, чтобы улучшить корреляцию между движением врубовой машины и распространением обрушения кровли выработки.
[0058] Фиг. 10 иллюстрирует еще один пример, в котором линия 1001, проявившаяся в данных о давлении, обозначающих событие обрушения кровли выработки, является по существу вертикальной, и проявляет мало сходства с частью линии 1003, представляющей положение врубовой машины. В данном примере, внезапное уменьшение в давлении на множестве PRS указывает на внезапное обрушение большого участка кровли выработки, в противоположность управляемому постепенному распространению обрушения кровли выработки. В некоторых реализациях, когда наклон линии 1001 указывает на внезапное обрушение, сигнал тревоги может передаваться с контроллера 301 системы для разработки длинными забоями на поверхностный компьютер 333, и работа системы 200 для разработки длинными забоями может быть отложена до тех пор, пока состояние системы 200 для разработки длинными забоями, выработки и любого персонала выработки не сможет быть дополнительно оценено, и не будет подтверждено, что операции разработки могут продолжаться несмотря на внезапное обрушение кровли выработки.
[0059] Стоит отметить, что, хотя примеры по фиг. 8, 9 и 10 обсуждают обнаружение линии с положительным наклоном, это происходит благодаря тому, как информация отображается в данном примере. Из-за того, что врубовая машина перемещается взад и вперед вдоль забоя выработки, события обрушения также были бы обнаружены в данных карты давлений, когда линия давления внезапно меняет наклон на отрицательный - в частности, после проходов врубовой машины, которые также отображаются, как имеющие отрицательный наклон на линии, наложенной на карту давлений.
[0060] В некоторых реализациях, пользователь системы 200 для разработки длинными забоями или пользователь, наблюдающий за работой системы 200 для разработки длинными забоями на поверхностном компьютере 333, может визуально проверять карту давлений, сформированную контроллером 301 системы для разработки длинными забоями, и совершать ручные регулировки в работе системы 200 для разработки длинными забоями. Тем не менее, по меньшей мере в некоторых реализациях, контроллер 301 системы для разработки длинными забоями выполнен, чтобы анализировать данные о давлении с карты давлений, и чтобы автоматически регулировать работу системы для разработки длинными забоями соответствующим образом.
[0061] Фиг. 11 иллюстрирует пример того, как контроллер 301 системы для разработки длинными забоями может быть выполнен, чтобы автоматически оптимизировать/регулировать работу системы 200 для разработки длинными забоями на основании наблюдаемых данных карты давлений. Контроллер 301 системы для разработки длинными забоями непрерывно принимает данные о давлении с каждой отдельной PRS в системе 200 для разработки длинными забоями (этап 1101) и формирует карту давлений (этап 1103). Затем, контроллер 301 системы для разработки длинными забоями оценивает данные о давлении и сформированную карту давлений. Когда обнаруживается (этап 1105) "сгруппированное" изменение давления (например, связанные по времени изменения давления на множестве PRS), контроллер 301 системы для разработки длинными забоями формирует "линию обрушения" с наилучшим приближением на основании данных о давлении (этап 1107). В данном примере, наклон "линии обрушения" сначала сравнивают с пороговым наклоном (этап 1109), и, если пороговый наклон превышен, контроллер 301 системы для разработки длинными забоями определяет, что произошло "внезапное обрушение" (этап 1111) и передает уведомление или сигнал тревоги на пользовательский интерфейс 325, поверхностный компьютер 333 или удаленную компьютерную систему через сеть интернет 335 (этап 1113) (например, сценарий, проиллюстрированный на фиг. 10).
[0062] Если наклон линии обрушения меньше, чем пороговый наклон, и контроллер 301 системы для разработки длинными забоями определяет, что событие обрушения не является "внезапным обрушением", но, вместо этого, является распространяющимся обрушением, тогда наклон линии обрушения сравнивают с наклоном соответствующей части линии положения врубовой машины (этап 1115). Если разница в наклоне превышает определенную "пороговую разницу в наклоне" (этап 1117), тогда контроллер 301 системы для разработки длинными забоями определяет, что врубовая машина перемещается слишком быстро или слишком медленно, чтобы регулировать распространение обрушения кровли выработки (например, сценарий, проиллюстрированный на фиг. 9). Скорость линейного движения врубовой машины вдоль угольного забоя регулируется на основании рассчитанной разницы в наклоне (этап 1119), с тем чтобы наклон линии положения врубовой машины лучше соответствовал наклону линии обрушения.
[0063] Если наклон линии обрушения в целом соответствует наклону линии положения врубовой машины (этап 1117), тогда контроллер 301 системы для разработки длинными забоями определяет, что скорость линейного движения врубовой машины является подходящей. Затем, контроллер 301 системы для разработки длинными забоями оценивает текущую схему управления для продвижения PRS на основании данных о давлении. В частности, контроллер 301 системы для разработки длинными забоями рассчитывает среднее временное расстояние между положением врубовой машины и линией обрушения (этап 1121) (например, среднее Y-расстояние между линией 801 обрушения и линией 803 положения врубовой машины для каждой PRS на оси X карты давлений). Если среднее временное расстояние между линией обрушения и линией положения врубовой машины находится за пределами определенного допустимого диапазона (этап 1123), тогда контроллер системы для разработки длинными забоями определяет, что обрушение кровли за каждой PRS происходит либо слишком рано, либо слишком поздно после продвижения каждой отдельной PRS, и будет регулировать задержку между проходом врубовой машины и регулировкой PRS, соответственно (этап 1125).
[0064] Например, если среднее временное расстояние между положением врубовой машины и линией обрушения слишком высокое, тогда общий вес кровли выработки, поддерживаемой PRS, также будет высоким. В ответ на обнаружение этого состояния, контроллер 301 системы для разработки длинными забоями может снижать определенный период задержки, с тем чтобы каждая отдельная PRS продвигалась скорее после проходов врубовой машины, тем самым способствуя более раннему обрушению кровли выработки за PRS.
[0065] Как обсуждалось выше, в некоторых ситуациях разработки и в некоторых реализациях системы для разработки длинными забоями, обрушение кровли в идеале происходило бы во время повторной установки в конце цикла LAS (или вскоре после нее). В таких условиях, "линия обрушения" может быть не видна в данных карты давлений между режущими проходами врубовой машины. По существу, контроллер 301 системы для разработки длинными забоями может быть дополнительно выполнен, чтобы обнаруживать, обрушилась ли часть кровли выработки, посредством отслеживания давления текучей среды внутри цилиндра, когда PRS поднимают в новое положение. Фиг. 12A представляет один из таких примеров для обнаружения событий нормального обрушения во время повторной установки PRS. После продвижения PRS в новое положение (этап 1201), клапан на цилиндре поршня открывают, тем самым повышая давление в поршне цилиндра, пока оно не достигнет порогового значения (например, давление текучей среды в "системной" линии из насосной станции) (этап 1203). После того, как давление текучей среды достигает порогового значения, клапан закрывают, и контроллер 301 системы для разработки длинными забоями продолжает отслеживать давление текучей среды внутри цилиндра (этап 1205). Если давление текучей среды не повышается сразу после закрывания клапана (или, схожим образом, если скорость повышения ниже порогового значения), тогда контроллер 301 системы для разработки длинными забоями делает вывод, что PRS не поддерживает чрезмерный вес необрушившейся кровли выработки и, таким образом, произошло обычное обрушение кровли выработки вслед за завершением цикла LAS (этап 1207). Тем не менее, если давление продолжает возрастать с высокой скоростью в направлении уровня давления перед LAS после закрывания клапана, тогда контроллер 301 системы для разработки длинными забоями определяет, что PRS поддерживает чрезмерный вес кровли из-за необрушившейся части кровли выработки.
[0066] В некоторых реализациях, контроллер 301 системы для разработки длинными забоями может быть дополнительно выполнен, чтобы оценивать количественную информацию из карт давлений. Например, когда контроллер 301 системы для разработки длинными забоями определяет, что часть кровли выработки не обрушилась, как ожидалось (используя способ по фиг. 12A), контроллер 301 системы для разработки длинными забоями может также оценивать количество режущих проходов, которые совершает врубовая машина между событиями обрушения кровли, используя способ по фиг. 12B. В то время как врубовая машина работает (этап 1211), система обнаруживает изменения давления в соседних PRS, указывающие на события обрушения кровли выработки, и подсчитывает количество режущих проходов, выполненных врубовой машиной после последнего обнаруженного события обрушения (этап 1213). Если количество режущих проходов меньше порогового значения (этап 1215), система продолжает работу (этап 1217). Тем не менее, если количество режущих проходов превышает пороговое значение, тогда контроллер 301 системы для разработки длинными забоями применяет смягчающее действие (этап 1219).
[0067] Конкретный тип смягчения, используемый контроллером 301 системы для разработки длинными забоями, может различаться в разных реализациях и в зависимости от конкретной операции разработки. Например, когда система обнаруживает, что определенное количество режущих проходов было завершено без события обрушения, контроллер 301 системы для разработки длинными забоями может просто генерировать сигнал тревоги, который выводится на пользовательский интерфейс 325 или передается на поверхностный компьютер 333. В других реализациях, система может быть выполнена, чтобы регулировать схему резания системы для разработки длинными забоями. Например, работа может регулироваться так, чтобы, вместо расположения PRS в линейной компоновке, PRS постепенно располагались в более искривленной или дугообразной компоновке, с тем чтобы дополнительная поддержка обеспечивалась в центральной части длинного забоя, в которой вес, прикладываемый к PRS, является самым высоким.
[0068] Фиг. 13 иллюстрирует другой пример методики количественного отслеживания, применяемой, используя карты давления, формируемые контроллером 301 системы для разработки длинными забоями. Во время операции разработки, движение врубовой машины может быть временно отложено, чтобы обеспечить возможность технического обслуживания механической системы или перерывов для рабочего персонала. Тем не менее, давления, прикладываемые к системе посредством кровли выработки, могут продолжать меняться, в то время как система 200 для разработки длинными забоями не работает. В способе по фиг. 13, в то время как врубовая машина не работает (этап 1301), контроллер 301 системы для разработки длинными забоями продолжает регулировать приводы PRS, чтобы поддерживать кровлю выработки. По мере того, как давления меняются и возрастают, некоторые PRS могут приближаться к или достигать состояния порога мощности, в котором обратный клапан начинает сбрасывать давление из цилиндра поршня. Контроллер 301 системы для разработки длинными забоями подсчитывает количество PRS, которые находятся на определенной доле состояния порога мощности (этап 1303). До тех пор, пока количество PRS, которые находятся на определенной доле от порога мощности, остается ниже порогового значения (этап 1305), система может оставаться в неработающем состоянии (этап 1307). Тем не менее, когда количество PRS на определенной доле от порога мощности превышает пороговое значение, система применяет смягчающее действие (этап 1309).
[0069] Как указано выше, конкретный тип смягчения, используемый контроллером 301 системы для разработки длинными забоями, может различаться в разных реализациях и в зависимости от конкретной операции разработки. В некоторых реализациях, разное смягчение применяется при превышении множества пороговых значений. Например, система может генерировать предупреждение, когда первое количество PRS достигает определенной доли состояния порога мощности, и, когда количество PRS возрастает выше второго порогового значения, контроллер 301 системы для разработки длинными забоями может автоматически инициировать повторный запуск системы, который возобновит работу врубовой машины.
[0070] В некоторых реализациях, система выполнена, чтобы просто отображать карту давлений (например, как проиллюстрировано на фиг. 6). Тем не менее, в других реализациях, система может быть выполнена, чтобы обеспечивать дополнительную графическую информацию, показывающую состояние устойчивости кровли выработки. Например, фиг. 14 показывает графическое изображение, которое показано на дисплее 329 пользовательского интерфейса 325 для системы, которая выполнена, чтобы отслеживать количество PRS, которые находятся в состоянии порога мощности или близки к нему (например, используя способ по фиг. 13). В этом примере, карта давлений в верхней части изображения схожа с картой давлений, обсуждаемой выше со ссылкой на фиг. 6. Тем не менее, нижняя часть изображения на фиг. 14 включает в себя временную гистограмму, показывающую количество PRS, которые имеют разные доли мощности давления в течение одинакового периода времени, используя цветовое кодирование. В каждый момент времени, графическое изображение по фиг. 14 показывает количество PRS, которые находятся на уровне 95-100% от порога мощности, количество PRS, которые находятся на уровне 90-95% от порога мощности, и так далее. Более темные, более насыщенные цвета обозначают более высокое количество PRS в каждом "интервале гистограммы" в каждый данный момент времени.
[0071] В конкретном примере по фиг. 14, работа врубовой машины временно откладывается на этапе 1401. Нижняя часть графического изображения по фиг. 14 показывает, что, после остановки движения врубовой машины на этапе 1401, количество PRS, которые приближаются к давлению порога мощности, возрастает до тех пор, пока работа врубовой машины не будет возобновлена на этапе 1403.
[0072] Формат изображения по фиг. 14, включающий в себя как карту давлений, так и временную гистограмму, обеспечивает дополнительную визуальную и различимую информацию касательно изменений в давлении и состоянии кровли выработки. Например, когда работа врубовой машины останавливается на этапе 1401, временная гистограмма показывает постепенное увеличение в количестве PRS которые находятся в состоянии порога мощности или рядом с ним (обозначено линией 1405). В некоторых реализациях, контроллер 301 системы для разработки длинными забоями выполнен, чтобы обнаруживать и оценивать это изменение в данных гистограммы, как обсуждается более подробно ниже. Более того, даже несмотря на то, что в примере по фиг. 14 не видно "линий, указывающих на внезапные уменьшения в давлении", область 1407 более темной окраски присутствует в середине карты давлений. Эта область указывает на давления, возрастающие за пределы ожидаемых уровней на возрастающем количестве PRS. В некоторых реализациях, контроллер 301 системы для разработки длинными забоями выполнен, чтобы обнаруживать формы и шаблоны в данных карты давлений, и чтобы применять подходящее ослабление (например, генерирование сигнала тревоги или изменение работы системы для разработки длинными забоями).
[0073] В некоторых реализациях, контроллер 301 системы для разработки длинными забоями дополнительно выполнен с возможностью отображения такой информации в дополнительных или альтернативных механизмах. Например, вместо использования временной гистограммы по фиг. 14, чтобы проиллюстрировать количество PRS, которые находятся под чрезмерным давлением, контроллер 301 системы для разработки длинными забоями может быть выполнен, чтобы отображать (либо временно, либо в качестве части дисплея главной системы) мгновенную гистограмму давлений, как проиллюстрировано на фиг. 15.
[0074] Как обсуждалось выше со ссылкой на фиг. 13, система может быть выполнена, чтобы отслеживать отдельные интервалы гистограммы и инициировать ослабление, когда количество PRS, которые находятся на определенном пороговом значении давления или выше него (например, доле от давления порога мощности). Тем не менее, как отмечено выше, в других реализациях, система управления может быть выполнена, чтобы отслеживать изменения во временной гистограмме по фиг. 14 и предсказывать момент времени, в который определенное количество PRS (или доля забоя) будет находиться в условиях порога мощности или рядом с ними, посредством отслеживания скорости изменения количества PRS в каждом интервале гистограммы. На основании этого предсказания, система управления может формировать сигнал тревоги, показывающий, когда персонал шахты должен вернуться в выработку, чтобы возобновить работу системы для разработки длинными забоями. Этот сигнал тревоги может быть передан или отображен в форме "обратного отсчета".
[0075] Фиг. 16 иллюстрирует пример такого способа. По мере того, как система принимает данные о давлении с PRS (этап 1601), система непрерывно обновляет карту давлений и временную гистограмму (этап 1603). На основании этих собранных данных, система оценивает временную гистограмму, чтобы обнаруживать возможные шаблоны в изменениях интервалов (этап 1605) (например, линию 1405 на фиг. 14). После обнаружения шаблона, указывающего на изменения в составе интервала на гистограмме, система обрабатывает данные о форме, чтобы выявить наилучшее шаблонное приближение для этой формы. Например, система может оценивать, могут ли изменения в данных гистограммы быть наилучшим образом представлены в виде линейной функции, в виде экспоненциальной функции, или в виде одной из множества других заранее запрограммированных функций. Как только выявлена функция "наилучшего приближения" для обнаруженной формы в данных гистограммы, система может предсказать, как будет продолжать развиваться шаблон в будущем и, на основании этой информации, предсказывает количество времени, оставшееся до тех пор, пока определенное количество (или доля) PRS в системе для разработки длинными забоями не будет в состоянии порога мощности или рядом с ним (этап 1607). На основании этой оценки, система выводит и отображает часы обратного отсчета, показывающие предсказанное количество оставшегося времени (этап 1609).
[0076] Несмотря на то, что в данном примере система непрерывно обновляет данные гистограммы и карты давлений, по мере того, как новые данные о давлении принимаются с PRS, обнаружение шаблона и предсказательное моделирование "наилучшего приближения" выполняется только периодически, чтобы ограничить вычислительную нагрузку на систему. По существу, после выполнения предсказания, система будет ожидать в течение периода задержки (этап 1611) перед обработкой данных и обновлением предсказания. В некоторых реализациях, продолжительность этого периода задержки между оценками остается неизменным. Тем не менее, в других реализациях, период задержки меняется, с тем чтобы предсказания обновлялись чаще по мере приближения к нулю "обратного отсчета" (то есть, предсказанного количества времени, оставшегося до тех пор, пока определенное количество PRS не приблизится к состоянию порога мощности).
[0077] Вышеприведенные примеры иллюстрируют несколько потенциально детектируемых состояний кровли выработки, которые могут быть выявлены, используя системы и способы, описанные выше. Тем не менее, в некоторых реализациях, альтернативная или дополнительная информация касательно состояния кровли выработки может быть определена на основании информации о давлении текучей среды с каждой PRS и/или используя сформированные карты давлений. Например, фиг. 17 иллюстрирует способ для обнаружения нестабильности кровли выработки, включающей в себя как предварительное растрескивание кровли, так и отсутствие обрушения. После того, как каждую PRS опускают и продвигают (этап 1701), клапан цилиндра поршня открывают к системной линии насосной станции, чтобы увеличить давление текучей среды в поршне (этап 1703). Это побуждает перекрытие PRS подниматься в направлении кровли выработки.
[0078] В нормальных рабочих условиях, клапан остается открытым до тех пор, пока давление текучей среды внутри цилиндра не достигнет порогового значения (этап 1705). Затем клапан закрывают (этап 1709) и система продолжает отслеживать давление текучей среды, чтобы определять, как кровля выработки воздействует на давление текучей среды в цилиндре, так как эта скорость изменения может указывать на состояние кровли выработки.
[0079] Например, насосная станция может быть выполнена, чтобы обеспечивать давление текучей среды на уровне 24,13 МПа на PRS на протяжении системной линии, и каждая PRS может быть выполнена, чтобы иметь порог мощности (то есть, сбрасывать обратный клапан) на уровне 48,26 МПа. После цикла LAS, клапан может быть открыт до тех пор, пока гидравлическая система не повысит внутреннее давление цилиндра поршня до 24,13 МПа и затем не закроет клапан. По мере того, как врубовая машина продолжает перемещаться по забою выработки, вес кровли выработки, воздействующий на перекрытие PRS, вызывает постепенное повышение давления текучей среды до 48,26 МПа перед следующим циклом LAS. Если, вслед за следующим циклом LAS, кровля выработки обрушается, как ожидалось, вес кровли на гидравлической системе будет вновь постепенно повышаться с 24,13 МПа до 48,26 МПа после закрывания клапана. Тем не менее, если кровля не обрушилась, как ожидалось, вес кровли выработки будет быстро воздействовать на PRS после ее установки в новое положение, и, после закрывания клапана, давление текучей среды в цилиндре будет быстро возрастать до внутреннего давления, которое было детектировано перед циклом LAS.
[0080] Возвращаясь к способу по фиг. 17, после закрывания клапана, система определяет скорость изменения давления текучей среды в цилиндре (этап 1711), и, если это скорость изменения не превышает пороговое значение (этап 1713), тогда система делает вывод, что кровля выработки обрушилась, как и предполагалось, после завершения цикла LAS (этап 1715). Тем не менее, если скорость изменения превышает пороговое значение, это могло бы указывать на отказ обрушения кровли выработки (этап 1717). Система определяет, были ли уже обнаружены другие возможные отказы обрушения на соседних PRS (этап 1719), и, если да, система подтверждает. что кровля выработки не смогла обрушиться, и может применять ослабление (этап 1721). Тем не менее, в некоторых реализациях, если возможные отказы обрушения еще не были обнаружены на соседних PRS, отказ обрушения кровли выработки еще не может быть подтвержден, и система продолжает отслеживать систему перед применением ослабления (этап 1723).
[0081] В способе по фиг. 17, отслеживаемые данные о давлении также могут указывать на преждевременное обрушение кровли. Если кровля выработки обрушается или начинает трескаться перед повторной установкой PRS в новое смещенное положение, тогда перекрытие PRS может не иметь возможности контактировать с кровлей выработки в новом положении, или кровля выработки не сможет надлежащим образом распределить свой вес на конкретной PRS. В примере по фиг. 17, если поршень поднял перекрытие PRS в максимальное положение (этап 1707) перед тем, как давление текучей среды в цилиндре достигло порогового значения (этап 1705), тогда система обнаруживает возможную "пустоту кровли" (этап 1725), которая может указывать на преждевременное растрескивание или обрушение кровли выработки. В качестве альтернативы, вместо определения того, что поршень достиг своей максимальной высоты, система может быть выполнена, чтобы обнаруживать состояние потенциальной пустоты кровли на основании того, смог ли поршень достичь порогового значения давления текучей среды в пределах ожидаемого определенного периода времени.
[0082] Когда обнаруживается возможная пустота кровли (этап 1725), система закрывает клапан (этап 1727) и определяет были ли уже обнаружены какие-либо другие возможные пустоты на соседних PRS (этап 1729). Если да, пустота кровли подтверждается (этап 1731) и система применяет соответствующее смягчение. Например, система может уменьшать период задержки между проходом врубовой машины и запуском цикла LAS (смотрите, например, фиг. 5). Вновь, в данном примере, если еще не были обнаружены другие возможные пустоты на соседних PRS, система еще не подтверждает состояние пустоты кровли и, вместо этого, продолжает отслеживать состояние кровли (этап 1733).
[0083] Система 200 для разработки длинными забоями, проиллюстрированная на фиг. 2, является лишь одним из примеров системы для разработки длинными забоями и может включать в себя дополнительные или альтернативные компоненты и/или конфигурацию в других вариантах осуществления. Схожим образом, структурная схема системы управления, проиллюстрированная на фиг. 3, также является лишь одним из примеров. В других реализациях, каждый из отдельных компонентов системы для разработки длинными забоями (например, врубовая машина, PRS, конвейерная лента) может содержать свой собственный отдельный контроллер. По существу, фраза "контроллер системы для разработки длинными забоями", в качестве используемого выше, может указывать ссылкой на отдельный контроллер системы, как проиллюстрировано в примере на фиг. 3, или на множество контроллеров на уровне компонентов, которые вместе обеспечивают координированную работу системы для разработки длинными забоями.
[0084] Таким образом, изобретение обеспечивает, среди прочего, систему и способ для отслеживания устойчивости кровли выработки с длинными забоями на основании гидравлических давлений в цилиндрах поршней каждой из множества механизированных крепей и использовании графических карт давлений, изображающих давление, прикладываемое к каждой отдельной механизированной крепи, и относительное положение врубовой машины в течение периода времени. Различные признаки и преимущества изобретения изложены в последующей формуле изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| МОНИТОРИНГ ГОРИЗОНТА ДЛЯ СПЛОШНОЙ СИСТЕМЫ РАЗРАБОТКИ | 2020 |
|
RU2734806C1 |
| МОНИТОРИНГ ГОРИЗОНТА ДЛЯ СПЛОШНОЙ СИСТЕМЫ РАЗРАБОТКИ | 2015 |
|
RU2695574C2 |
| МОНИТОРИНГ ГОРИЗОНТА ДЛЯ СПЛОШНОЙ СИСТЕМЫ РАЗРАБОТКИ | 2015 |
|
RU2719854C2 |
| МОНИТОРИНГ ГОРИЗОНТА ДЛЯ СПЛОШНОЙ СИСТЕМЫ РАЗРАБОТКИ | 2020 |
|
RU2748987C1 |
| СПОСОБ КАРИМАНА ПОДЗЕМНОЙ РАЗРАБОТКИ ИСКОПАЕМЫХ | 2003 |
|
RU2269003C2 |
| СИСТЕМА СТАБИЛИЗАЦИИ ДЛЯ ГОРНОЙ МАШИНЫ | 2012 |
|
RU2618005C2 |
| СИСТЕМА СТАБИЛИЗАЦИИ ДЛЯ ГОРНОЙ МАШИНЫ | 2012 |
|
RU2740182C2 |
| ОЧИСТНОЙ КОМПЛЕКС ПРОФЕССОРА КАРИМАНА | 2006 |
|
RU2323339C2 |
| МОНИТОРИНГ КРЕПЛЕНИЯ КРОВЛИ В СИСТЕМЕ СПЛОШНОЙ РАЗРАБОТКИ | 2015 |
|
RU2691793C2 |
| СПОСОБ ПРОФЕССОРА КАРИМАНА ПОДЗЕМНОЙ РАЗРАБОТКИ ПЛАСТОВЫХ МЕСТОРОЖДЕНИЙ ПОЛЕЗНЫХ ИСКОПАЕМЫХ С ВЫЕМКОЙ ИХ БЛОКАМИ И ТРАНСПОРТИРОВКОЙ ЭСКАЛАТОРАМИ | 2008 |
|
RU2383736C2 |













Изобретение относится к горному делу и может быть использовано для контроля устойчивости кровли в подземных горных выработках в условиях подземной разработки длинными забоями. Технический результат - повышение безопасности. В частности, предложена система для разработки длинными забоями, содержащая: множество механизированных крепей, при этом каждая механизированная крепь включает в себя управляемый гидравлический поршень, выполненный с возможностью приложения регулируемого опорного давления к кровле выработки; врубовую машину, выполненную с возможностью перемещения по забою выработки по мере того, как множество механизированных крепей расположены в ряд вдоль забоя выработки, и электронный блок управления, выполненный с возможностью приема данных от каждой механизированной крепи из множества механизированных крепей, указывающих на давление текучей среды внутри каждого соответствующего управляемого гидравлического поршня, и отслеживания состояния кровли выработки на основании изменений в принятых данных в течение периода времени. При этом электронный блок управления выполнен с возможностью отслеживания состояния кровли выработки на основании изменений в принимаемых данных в течение периода времени посредством формирования графической карты давления. Причем графическая карта давлений включает в себя множество параллельных линий отображения, каждая из которых предоставляет показание давления текучей среды внутри одного отдельного управляемого гидравлического поршня из множества механизированных крепей в течение периода времени, и линию положения врубовой машины, показывающую положение врубовой машины относительно множества механизированных крепей в течение периода времени, наложенную на множество параллельных линий отображения. 3 н. и 20 з.п. ф-лы, 21 ил.
1. Система для разработки длинными забоями, содержащая:
множество механизированных крепей, при этом каждая механизированная крепь включает в себя управляемый гидравлический поршень, выполненный с возможностью приложения регулируемого опорного давления к кровле выработки;
врубовую машину, выполненную с возможностью перемещения по забою выработки по мере того, как множество механизированных крепей расположены в ряд вдоль забоя выработки, и
электронный блок управления, выполненный с возможностью
приема данных от каждой механизированной крепи из множества механизированных крепей, указывающих на давление текучей среды внутри каждого соответствующего управляемого гидравлического поршня, и
отслеживания состояния кровли выработки на основании изменений в принятых данных в течение периода времени,
при этом электронный блок управления выполнен с возможностью отслеживания состояния кровли выработки на основании изменений в принимаемых данных в течение периода времени посредством формирования графической карты давления, при этом графическая карта давлений включает в себя
множество параллельных линий отображения, каждая из которых предоставляет показание давления текучей среды внутри одного отдельного управляемого гидравлического поршня из множества механизированных крепей в течение периода времени, и
линию положения врубовой машины, показывающую положение врубовой машины относительно множества механизированных крепей в течение периода времени, наложенную на множество параллельных линий отображения.
2. Система для разработки длинными забоями по п. 1, в которой электронный блок управления дополнительно выполнен с возможностью отслеживания состояния кровли выработки посредством обнаружения схожих по времени изменений в давлении текучей среды во множестве смежных механизированных крепей, обозначающих событие обрушения кровли выработки.
3. Система для разработки длинными забоями по п. 2, в которой электронный блок управления дополнительно выполнен с возможностью отслеживания состояния кровли выработки посредством определения линии обрушения с наилучшим линейным приближением на графической карте давления на основании обнаруженных изменений в давлении текучей среды, обозначающих событие обрушения кровли выработки.
4. Система для разработки длинными забоями по п. 3, в которой электронный блок управления дополнительно выполнен с возможностью отслеживания состояния кровли выработки посредством
сравнения наклона линии обрушения с наилучшим линейным приближением с пороговым наклоном внезапного обрушения, и
определения того, что часть кровли выработки, продолжающаяся через более чем одну механизированную крепь, внезапно обрушилась, когда наклон линии обрушения с наилучшим линейным приближением превышает пороговый наклон внезапного обрушения,
при этом электронный блок управления дополнительно выполнен с возможностью передачи сигнала тревоги на удаленно расположенный компьютер в ответ на определение того, что часть кровли выработки внезапно обрушилась.
5. Система для разработки длинными забоями по п. 3, в которой электронный блок управления дополнительно выполнен с возможностью отслеживания состояния кровли выработки посредством сравнения наклона линии обрушения с наилучшим линейным приближением с наклоном по меньшей мере части линии положения врубовой машины, и
при этом электронный блок управления дополнительно выполнен с возможностью регулирования скорости линейного движения врубовой машины по забою выработки на основании разницы между наклоном линии обрушения с наилучшим линейным приближением и наклоном линии положения врубовой машины.
6. Система для разработки длинными забоями по п. 3, в котором электронный блок управления дополнительно выполнен с возможностью отслеживания состояния кровли выработки посредством расчета среднего временного расстояния между линией обрушения с наилучшим линейным приближением и частью линии положения врубовой машины, и
при этом электронный блок управления дополнительно выполнен с возможностью
опускания, перемещения и установки каждой механизированной крепи после задержки в ответ на перемещение врубовой машины через отдельную механизированную крепь вдоль забоя выработки, и
регулировки продолжительности задержки на основании среднего временного расстояния между линией обрушения с наилучшим линейным приближением и линией положения врубовой машины.
7. Система для разработки длинными забоями по п. 1, дополнительно содержащая пользовательский интерфейс, включающий в себя дисплей, при этом электронный блок управления выполнен с возможностью выведения графической карты давлений на дисплей пользовательского интерфейса.
8. Система для разработки длинными забоями по п. 1, в которой электронный блок управления дополнительно выполнен с возможностью передачи данных о давлении текучей среды на удаленно расположенную компьютерную систему, при этом удаленно расположенная компьютерная система выполнена с возможностью приема данных о давлении текучей среды от множества систем для разработки длинными забоями и составления оптимизированных процедур разработки на основании принятых данных о давлении текучей среды.
9. Система для разработки длинными забоями по п. 1, в которой электронный блок управления дополнительно выполнен с возможностью регулирования работы системы для разработки длинными забоями на основании отслеживаемого состояния кровли выработки.
10. Система для разработки длинными забоями по п. 1, в которой электронный блок управления дополнительно выполнен с возможностью определения значения, указывающего на регулируемое опорное давление, прикладываемое к кровле выработки каждой отдельной механизированной крепью на основании давления текучей среды в каждом отдельном управляемом гидравлическом поршне.
11. Способ отслеживания состояния кровли выработки с использованием системы для разработки длинными забоями, включающий этапы, на которых:
управляют множеством механизированных крепей, расположенных в ряд вдоль забоя выработки, для приложения регулируемого опорного давления к кровле выработки;
управляют врубовой машиной для перемещения по забою выработки, врезаясь в забой выработки;
принимают данные от каждой механизированной крепи из множества механизированных крепей, указывающие на регулируемое опорное давление, прикладываемое к кровле выработки каждой отдельной механизированной крепью;
формируют графическую карту давлений на основании данных, принятых с каждой механизированной крепи, при этом графическая карта давлений включает в себя
множество параллельных линий отображения, каждая из которых обеспечивает обозначение регулируемого опорного давления, прикладываемого к кровле выработки отдельной механизированной крепью в течение периода времени, и
линию положения врубовой машины, показывающую положение врубовой машины относительно множества механизированных крепей в течение периода времени, наложенную на множество параллельных линий отображения; и
отслеживают состояние кровли выработки на основании изменений в регулируемом опорном давлении, показанном на графической карте давлений.
12. Способ по п. 11, в котором данные, принимаемые от каждой из механизированных крепей, включают в себя измерение давления, прикладываемого приводом механизированной крепи.
13. Способ по п. 12, в котором управление множеством механизированных крепей включает в себя этап, на котором осуществляют управляемую регулировку давления текучей среды в цилиндре гидравлического поршня по меньшей мере одной из механизированных крепей, и
при этом измерение давления, прикладываемого приводом механизированной крепи, включает в себя измерение давления текучей среды в цилиндре гидравлического поршня по меньшей мере одной механизированной крепи.
14. Способ по п. 11, дополнительно включающий этап, на котором отображают графическую карту давлений на пользовательском интерфейсе.
15. Способ по п. 11, дополнительно включающий этапы, на которых:
передают графическую карту давлений на удаленно расположенную компьютерную систему, и
анализируют графическую карту давлений и множество дополнительных графических карт давлений, чтобы составить оптимизированные процедуры на основании регулируемого опорного давления, прикладываемого к кровле выработки множеством механизированных крепей.
16. Способ по п. 11, в котором отслеживание состояния кровли выработки включает в себя этап, на котором определяют схожие по времени изменения в регулируемом опорном давлении, прикладываемом к кровле множеством смежных механизированных крепей, указывающих на событие обрушения кровли выработки.
17. Способ по п. 11, дополнительно включающий этап, на котором регулируют работу системы для разработки длинными забоями на основании отслеживаемого состояния кровли выработки.
18. Система управления для системы для разработки длинными забоями, содержащая процессор и память, хранящую команды, которые, при исполнении процессором, побуждают систему управления:
управлять множеством механизированных крепей, расположенных в ряд вдоль забоя выработки, для приложения регулируемого опорного давления к кровле выработки;
управлять врубовой машиной для перемещения по забою выработки, врезаясь в забой выработки;
принимать данные от каждой механизированной крепи из множества механизированных крепей, указывающие на регулируемое опорное давление, прикладываемое к кровле выработки каждой отдельной механизированной крепью,
формировать графическую карту давлений на основании данных, принятых от каждой механизированной крепи, при этом графическая карта давлений включает в себя
множество параллельных линий отображения, каждая из которых обеспечивает обозначение регулируемого опорного давления, прикладываемого к кровле выработки отдельной механизированной крепью в течение периода времени, и
линию положения врубовой машины, показывающую положение врубовой машины относительно множества механизированных крепей в течение периода времени, наложенную на множество параллельных линий отображения; и
отслеживать состояние кровли выработки на основании изменений в регулируемом опорном давлении, показанном на графической карте давлений.
19. Система управления по п. 18, в которой данные, принимаемые с каждой из механизированных крепей, включают в себя измерение давления, прикладываемого приводом механизированной крепи.
20. Система управления по п. 19, в которой команды, при исполнении их процессором, побуждают систему управления управлять множеством механизированных крепей посредством управляемой регулировки давления текучей среды в цилиндре гидравлического поршня по меньшей мере одной из механизированных крепей, и
при этом измерение давления, прикладываемого приводом механизированной крепи, включает в себя измерение давления текучей среды в цилиндре гидравлического поршня по меньшей мере одной механизированной крепи.
21. Система управления по п. 18, в которой команды, при исполнении их процессором, дополнительно побуждают систему управления отображать графическую карту давлений на пользовательском интерфейсе.
22. Система управления по п. 18, в которой команды, при исполнении их процессором, дополнительно побуждают систему управления регулировать работу системы для разработки длинными забоями на основании отслеживаемого состояния кровли выработки.
23. Система управления по п. 18, в которой команды, при исполнении их процессором, побуждают систему управления отслеживать состояние кровли выработки посредством обнаружения схожих по времени изменений в регулируемом опорном давлении, прикладываемом к кровле выработки на множестве соседних механизированных крепей, указывающих на событие обрушения кровли выработки.
| Система регулирования сопротивления механизированной крепи | 1980 |
|
SU881342A1 |
| US 6056481 A, 02.05.2000 | |||
| US 3672174 A, 27.06.1972 | |||
| US 6957166 B1, 18.10.2005 | |||
| СПОСОБ УПРАВЛЕНИЯ ЩИТОМ | 2011 |
|
RU2477797C1 |

