Назначение и область применения
Изобретение относится к средствам автоматического контроля конструктивных параметров, а именно к способу и устройству измерения и контроля щелевых отверстий противопесочных фильтров, используемых в горной промышленности.
Предшествующий уровень техники
Добыча нефти и газа в типовых условиях осуществляется путем бурения скважины на глубину месторождения и установки в скважине последовательности соединенных труб, с помощью которых осуществляется транспортировка или подъем углеводородов на поверхность. В процессе бурения скважины, операций спуска-подъёма оборудования, а также в процессе извлечения нефтяного флюида образуются обломки осадочных пород, которые вызывают снижение продуктивность нефтедобычи и вызывают поломки оборудования. Для борьбы с явлением пескообразования используют специальные фильтры, предотвращающие попадание в добываемый флюид большей части песка и снижающих влияние пескообразования на эффективность извлечения углеводородного сырья. На практике для борьбы с пескопроявлением в большинстве случаев используют щелевые проволочные фильтры, которые имеют проволочный щелевой экран, образованный витками обмоточной проволоки, сваренными с проволочными направляющими фильтра (родами). Проволочный экран одевается на перфорированную базовую трубу или накручивается на нее в режиме прямой намотки. Качество проволочного щелевого фильтра в плане свойств фильтрации определяется, прежде всего, распределением величин щелевых отверстий фильтра. По распределениям этих величин существуют строгие требования, предъявляемым компаниями-операторами нефтедобычи. Обычно эти требования сводятся к условиям к средним значениям величин зазоров и их среднеквадратичным отклонениям от средних значений. В любом случае выполнение этих требований связано с условия на параметры отклонения щелевых зазоров от номинального размера. В этом плане задача контроля и измерения щелевых зазоров готовой продукции фильтров является весьма актуальной и востребованной.
Большое количество щелевых отверстий фильтра делает процедуру контроля зазоров данных отверстий посредством традиционных ручных способов замера с использованием специальный щупов весьма трудоемкой, неэффективной, неоперативной и недостаточно точной. Ручное введение щупа в зазор, в том числе и с помощью оптического прицела, для измерения его ширины требуют много времени и подвержены человеческой ошибке. Чтобы сэкономить время, можно измерить относительно небольшой набор интервалов выборки и применить статистические методы для определения среднего значения ширины зазора, однако относительно небольшой выборки щелевых зазоров, оцениваемых в качестве образцов может быть недостаточно, для получения достоверной оценки, учитывая протяженность противопесочных фильтров, требующих контроля. Кроме того, из-за небольших размеров зазоров обычно требуется увеличенное изображение с помощью увеличительной линзы для измерения их ширины, что также является источником искажения измеряемых данных при осуществлении измерений вручную. Некоторые из данных решений раскрыты, например, в патенте США US 4,914,514.
Автоматический контроль с использованием специальных инспекционных машин позволяет снижать трудоемкость контроля зазоров и повышать его эффективность и точность. Кроме того, автоматический контроль позволят гораздо более эффективно решать задачи выявления дефектных участком намотки фильтров и оперативно давать рекомендации по параметрам намотки проволочных фильтров для достижения требуемого качества их исполнения.
Из публикации патента США US7755770B2 известно также решение в котором раскрывается способ контроля поверхности объекта, в частном случае, противопесочного фильтра, включающий сканирование поверхности с использованием массива оптоэлектронных датчиков, получение отраженного светового сигнала от места на поверхности, комбинирование световых сигналов для формирования представления геометрических особенностей поверхности и обработки представление для получения геометрических величин геометрических элементов. Устройство для контроля фильтра, включает массив из множества оптоэлектронных датчиков, блок управления движением и процессор для получения геометрической величины щелевого зазора контролируемого противопесочного фильтра на основе изображения, полученного матрицей датчиков, и зарегистрированного блоком управления движением местоположения. Датчики могут включать в себя лазерные датчики или камеры машинного зрения, или их комбинацию. При использовании лазерного датчика лазер создает небольшое световое пятно на исследуемой поверхности. Несплошность на поверхности, т.е. наличие зазора между проволоками, приводит к затемнению светового пятна. Такое событие фиксируется и записывается вместе с координатами движения, предоставленными блоком управления движением. Затем, при правильной калибровке, соседние метки объединяются в цифровое геометрическое изображение. В соответствии с некоторыми вариантами осуществления изобретения фотодетектор в матрице определяет яркость светового пятна. Карта яркости может быть создана во время сканирования и может использоваться для анализа геометрических характеристик поверхности. При использовании камер машинного зрения блок управления движением перемещает объект, подлежащий проверке, или перемещает камеру или множество камер для сканирования поверхности и записи изображения поверхности. Обработка цифровых пикселей в сочетании с соответствующей калибровкой системы преобразуется в количественную двумерную информацию. При этом, когда исследуемая поверхность имеет цилиндрическую форму, сканирование обычно выполняется за счет вращательного движения вокруг оси цилиндра. В соответствии с некоторыми вариантами осуществления настоящего изобретения сканирование также может выполняться последовательными итерациями линейных и/или вращательных движений. К числу недостатков данного решения следует отнести относительную нестабильность предложенного способа измерений и контроля, в виду того, что оценка по яркости светового пятна как такового может привести к ошибочной оценке в виду низкой различительной способности ее изменения, которая может быть вызвана, как особенностями конструкции, так и внешними факторами.
Известен способ и система автоматического оптического контроля щелевых зазоров, описанный в патенте US 7102745 B2 публ. от 05.09.2006. В данном изобретении раскрыты способ и система оптического контроля щелевых зазоров фильтра, в которых используется цифровая камера для регистрации щелевого зазора в виде цифрового изображения. Полученное посредством цифровой камеры изображение обрабатывается с помощью вычислительного алгоритма для получения значения величины щелевого зазора в метрических единицах (микронах). В описанном устройстве используется система горизонтального перемещения оптического сканера по винтовой направляющей вдоль оси фильтра с возможностью вращения фильтра вокруг своей оси. Недостатком данного устройства является отсутствие системы перемещения сканера в направлении перпендикулярном оси фильтра. Дело в том, что фильтрующая поверхность может достигать 10-метровой длины, на протяжении которой возможны значительные изменения расстояний в профиле трубы от поверхности фильтра до текущего положения сканера. Указанное ограничение приводит к усложнению конструкции сканера с необходимостью автоматической фокусировки изображения щели. Данный момент может существенно влиять на качество получаемого изображения и замедлять общий процесс сканирования. Кроме того, наличие одной горизонтальной направляющей для крепления сканера предъявляет высокие требования по установке этой направляющей, чтобы сканер перемещался максимально приближенным к направлению параллельному к оси фильтра. Определенные сложности появляются при использовании разных диаметров фильтра или при использовании фильтра с муфтами диаметра большим, чем фильтр.
По совокупности существенных признаков данное решение является наиболее близким к заявленному решению, как в отношении конструктивного решения, так и по реализуемому с его помощью способу контроля и измерения щелевых зазоров противопесочного фильтра и может быть принято за прототип. К числу недостатков данного решения следует отнести относительную нестабильность предложенного способа измерений и контроля, в виду того, что оценка по изображению цифровой камеры как такового может привести к ошибочной оценке в виду низкой различительной способности ее изменения, которая может быть вызвана, как особенностями конструкции, так и внешними факторами.
Сущность заявленного изобретения.
Техническая проблема, решаемая заявленной группой изобретений, заключается в преодолении вышеуказанных проблем известных из уровня техники решений и предложении решения с повышенной точностью и стабильностью измерения и контроля ширины зазоров противопесочных фильтров, без существенного усложнения конструкции инспекционной машины и длительности осуществления процесса финишного контроля и измерения щелевых зазоров противопесочных фильтров.
Технический результат, достигаемый заявленным решением, заключается в повышении точности и скорости выполнения измерений, при упрощении конструкции и повышении ее надежности.
Заявленный технический результат достигается применением способа финишного контроля и измерения щелевых зазоров противопесочных фильтров характеризующийся выполнением последовательно выполняемых действий, включающих:
- установку оптического сканера над фильтром на заданном программно-аппаратным образом по высоте от поверхности сканирования фильтра фокусном расстоянии;
- сканирование поверхности фильтра посредством оптического сканера, непрерывно перемещаемого вдоль фильтра в горизонтальном направлении при пульсирующей подсветке сканируемой поверхности фильтра с заданной блоком управления программно-аппаратным образом скоростью;
- поддержание в процессе сканирования положения оптического сканера в пределах предустановленного фокусного расстояния посредством измерения высоты размещения оптического сканера над фильтром датчиком контроля и подстройки блоком управления положения оптического сканера по высоте программно-аппаратным образом при отклонении текущего положения от заданных параметров фокусного расстояния;
- захват фотоприемником оптического сканера в цифровом формате изображения сканируемой поверхности фильтра, включающего один щелевой зазор с краями из металлической проволоки соседних витков фильтра, повторение операции при перемещении оптического сканера по сканируемой поверхности с заданными программно-аппаратным образом параметрами.;
- определение границ щелевого зазора посредством обработки программно-аппаратным образом светотеневого спектра каждого получаемого изображения на основе выделения контуров между светлой и теневой частью изображения посредством пороговой обработки с удалением пространственно-временного шума и одновременным увеличением детализации изображения; а также
- вычисление для каждого изображения программно-аппаратным образом величины щелевого зазора по выделенным границам посредством определения площади щелевого зазора между границами и вычисления среднего значения щелевого зазора по ширине щели в пикселях с преобразованием в метрические единицы с учетом коэффициента масштабирования, являющегося показателем разрешающей способности оптической системы оптического сканера.
В одном из возможных вариантов осуществления заявленного изобретения, осуществляют повторение операций для определения ширины щелевого зазора в первом множестве местоположений по длине экрана под заданным углом расположения сканера по отношению к поверхности фильтра. При этом в еще одном варианте осуществления также осуществляют повторение операций для определения ширины щелевого зазора во втором множестве местоположений по длине фильтра под заданным углом расположения сканера по отношению к поверхности фильтра при повороте фильтра на заданный угол по отношению к измерениям в первом множестве местоположений.
В другом варианте осуществления заявленного изобретения, пороговую обработку осуществляют, по меньшей мере, посредством бинаризации пикселей исходного изображения по фиксированному порогу, а удаление пространственно-временного шума последовательным применением операторов эрозии и дилатации. Причем, в одном из возможных вариантов осуществления бинаризацию пикселей осуществляют по интенсивности и фиксированному порогу следующим образом:

где threshold - параметр контрастности, устанавливаемый исходя из свойств матрицы цифровой фотокамеры, интенсивности подсветки и отражающих свойств границ щелевых зазоров.
В одном из возможных вариантов осуществления решения, на этапе установки оптического сканера на фокусном расстоянии от сканируемой поверхности вычисления текущего расстояния оптического сканера по высоте до поверхности фильтра осуществляют посредством лазерного датчика контроля фокуса с использованием алгоритма осреднения данных по расстояниям, регистрируемых лазерным датчиком контроля фокуса в ходе сканирования поверхности фильтра.
В другом варианте осуществления изобретения осуществляют корректировку текущего положения оптического сканера в пределах заданного фокусного расстояния посредством перемещения сканера в вертикальном направлении до установления заданного расстояния до фильтра.
В еще одном варианте, осуществляют перемещение оптического сканера вдоль тестируемого фильтра посредством подвижной каретки.
Согласно заявленному изобретению по любому из возможных вариантов осуществления, дополнительно осуществляют статистическую обработку данных измерений и анализ распределения щелевых зазоров фильтра с подсчетом средних значений зазоров и среднеквадратичных отклонений, осуществляемый программно-аппаратным образом по предустановленному алгоритму и формируют построение итогового отчета по тестированию щелевых зазоров фильтра с применением предустановленных критериев годности их распределения для фильтра.
В другом варианте осуществления, по любому из возможных вариантов, осуществляют измерение щелевых зазоров по внешней поверхности фильтра при перемещении оптического сканера вдоль фильтра и вращении фильтра вдоль продольной оси, причем вращение фильтра осуществляют посредством подсистемы вращения, снабженной двигателем, момент вращения которого передают через систему соприкасающихся роликов подсистемы вращения на фильтр.
В еще одном варианте изобретения осуществляют перемещение оптического сканера посредством подсистемы горизонтального перемещения инспекционной машины, причем в другом варианте сканер устанавливают на колонну, а ее перемещение вдоль фильтра осуществляют на каретке по направляющим рельсам и зубчатой рейки, закрепленных на горизонтальной пластине инспекционного стола за счет вращения шестеренки мотора подсистемы горизонтального перемещения инспекционной машины.
В еще одном возможном варианте осуществления изобретения осуществляют управление измерением щелевых зазоров фильтра посредством блока управления инспекционной машины, снабженной сенсорным экраном и процессором управляющего блока инспекционной машины, посредством программно-аппаратным образом реализуемого алгоритма с графическим интерфейсом, отображаемым на сенсорном экране.
При этом в другом варианте пульсирующую подсветку сканируемой поверхности осуществляют посредством снабжения оптического сканера промышленной подсветкой, с обеспечением возможности цифрового захвата изображения щелевого зазора без искажения цветоделения.
Заявленный технический результат достигается также использованием инспекционной машины финишного контроля и измерения щелевых зазоров противопесочных фильтров, включающей, по меньшей мере, средство для размещения фильтра, оптический сканер поверхности фильтра, включающий источник излучения и последовательно расположенные объектив и фотоприемник, а также средства установки и перемещения оптического сканера вдоль фильтра и соединенный с ними блок управления включающий программно-аппаратные средства, снабженные, по меньше мере, предустановленным программно-аппаратным образом в блоке памяти алгоритмом выполнения операций финишного контроля и измерения щелевых зазоров, отличающейся от прототипа тем, что источник излучения выполнен в виде промышленной подсветки, а объектив и фотоприемник формируют оптический канал захвата изображения сканируемого участка фильтра в области подсветки источником излучения и его преобразования в цифровой формат, при этом оптический сканер дополнительно снабжен датчиком контроля положения оптического сканера от фильтра на фокусного расстояния, соединенным с блоком управления, снабженным программно-аппаратными средствами подстройки положения оптического сканера по высоте от сканируемой поверхности при отклонении от заданного значения фокусного расстояния текущих показаний датчика контроля, а блок управления снабжен предустановленным в блоке памяти реализованным программно-аппаратным образом средством определения границ измеряемого щелевого зазора между витками фильтра по предустановленному программно-аппаратным образом алгоритму обработки светотеневого спектра получаемого от фотоприемника цифрового изображения сканируемого участка фильтра посредством его пороговой обработки с удалением пространственно-временного шума.
При этом в одном из возможных вариантов осуществления заявленного решения оптический сканер может быть размещен на подвижной в вертикальном направлении платформе, установленной на вертикально ориентированной подвижной в горизонтальном направлении, вдоль фильтра, колонне средства установки и перемещения оптического сканера, причем датчик контроля размещен на платформе посредством неподвижного кронштейна. При этом, в другом варианте осуществления, оптический сканер может быть снабжен телецентрическим объективом, с возможностью формирования пучка параллельных лучей, а датчик контроля выполнен в виде лазерного триангуляционного датчика и/или лазерного дальномера. Причем, в еще одном варианте осуществления, фотоприемник может быть выполнен в виде цифровой матричной камеры и снабжен би-телецентрическим объективом.
В одном из предпочтительных вариантов осуществления заявленного изобретения, промышленная подсветка, может быть закреплена на телецентрическом объективе и выполнена пульсирующей с предустановленной программно-аппаратным образом в микроконтроллере блока управления скоростью, а фотоприемник выполнен с короткой выдержкой затвора, сопоставимой со скоростью пульсации, с обеспечением возможности фиксации и записи сканируемого изображения при непрерывном движении колонны вдоль фильтра (при 60 кадрах в секунду).
В другом возможном варианте осуществления изобретения источник излучения также может быть дополнительно снабжен лазерным микрометром.
В соответствии в любым из возможных вариантов осуществления средство для размещения фильтра может быть выполнено в виде горизонтально ориентированной поверхности, снабженной вращающимися вокруг горизонтальной оси соприкасающимся роликами удерживающими фильтр на поверхности стола, по меньшей мере, один из которых сопряжен с подсистемой вращения тестируемого фильтра, снабженной двигателем вращения, сопряженным с блоком управления, при этом, вдоль одной из боковых сторон стола размещена подсистема горизонтального перемещения вдоль фильтра колонны с оптическим устройством сканирования, сопряженная с блоком управления.
При этом в еще одном варианте осуществления подсистема горизонтального перемещения колонны с оптическим устройством сканирования может быть снабжена двумя направляющими рельсами с зубчатой рейкой, сопряженных с мотором горизонтального перемещения и кареткой, установленной на колонне, а подсистема горизонтального перемещения дополнительно снабжена концевыми датчиками ограничения перемещения колонны, сопряженные с устройством управления
Согласному одному из аспектов заявленного изобретения, средство для размещения фильтра может быть дополнительно снабжено средством парковки колонны с оптическим устройством сканирования, располагаемым с одной из торцевых сторон и снабженным защитным щитком.
Согласно заявленному изобретению блок управления инспекционной машины может быть сопряжен с монитором и снабжен контроллерами горизонтального и вертикального перемещения оптического устройства сканирования, сопряженными с соответствующими подсистемами управления горизонтальным и/или вертикальным перемещением оптического устройства сканирования; контроллером вращения фильтра, сопряженного с соответствующей подсистемой вращения тестируемого фильтра, средствами управления инспекционной машиной, а также блоками памяти и обработки информации, причем блоки памяти и обработки информации контроллеры блока управления снабжены программно-аппаратным образом предустановленным алгоритмом управления режимами работы оптического устройства сканирования, его фокусировки и обработки светотеневого спектра получаемого изображения посредством пороговой обработки с удалением пространственно-временного шума.
При этом. в еще одном варианте, предустановленный программно-аппаратным образом алгоритм обработки светотеневого спектра получаемого изображения посредством пороговой обработки с удалением пространственно-временного шума блока обработки информации блока управления выполнен с обеспечением возможности:
- сканирования поверхности фильтра, выполненного с возможностью вращения вокруг продольной оси, с использованием оптического сканера, выполненного с возможностью перемещения в горизонтальном и/или вертикальном направлении;
- фокусировка оптического сканера посредством датчика контроля фокуса по текущим измерениям расстояния оптической системы сканера сканируемой поверхности щелевого фильтра и вертикальной подстройки положения сканера при отклонении текущих показаний датчика контроля фокуса от предустановленных в блоке управления значений фокусного расстояния;
- захвата в цифровом формате изображения поверхности фильтра, включающего один щелевой зазор с краями из металлической проволоки соседних витков фильтра;
- определения границ зазора по предустановленному программно-аппаратным образом алгоритму обработки светотеневого спектра получаемого изображения на основе выделения контуров между светлой и теневой частью изображения посредством пороговой обработки с удалением пространственно-временного шума и одновременным увеличением детализации изображения; а также
- вычисления по предустановленному программно-аппаратным образом алгоритму величины щелевого зазора по выделенным границам на основе определения площади щелевого зазора между границами и вычисления среднего значения щелевого зазора по ширине щели в пикселях с преобразованием в метрические единицы с учетом коэффициента масштабирования, являющегося показателем разрешающей способности оптической системы сканера.
Заявленный технический результат также достигается использованием другого варианта Инспекционной машины финишного контроля и измерения щелевых зазоров противопесочных фильтров, включающей, по меньшей мере, средство для размещения фильтра, оптический сканер поверхности фильтра, включающий, по меньшей мере, канал измерения, содержащий последовательно расположенные объектив и фотоприемник, а также средства установки и перемещения оптического сканера вдоль фильтра и соединенный с ними блок управления включающий программно-аппаратные средства, снабженные, по меньше мере, предустановленным в блоке памяти алгоритмом выполнения операций финишного контроля и измерения щелевых зазоров, отличающаяся от прототипа тем, что оптический сканер выполнено в виде лазерно-оптического блока, включающего оптический источник зондирующего лазерного излучения, канал измерения полученного отраженного изображения сканируемой поверхности, а также дополнительного датчика контроля фокуса по измеряемым данным текущего расстояния оптического сканера до сканируемой поверхности фильтра, соединенным с блоком обработки информации блока управления, снабженным программно-аппаратными средствами фокусировки оптического сканера по отклонению от заданного значения показаний датчика контроля фокуса, а также определения границ измеряемого зазора по предустановленному программно-аппаратным образом алгоритму обработки светотеневого спектра получаемого изображения посредством пороговой обработки с удалением пространственно-временного шума.
Согласно одному из вариантов осуществления заявленного решения, источник зондирующего лазерного излучения может быть выполнен в виде оптического микрометра, а оптическое устройство сканирования размещено на подвижной в вертикальном направлении платформе, установленной на вертикально ориентированной подвижной в горизонтальном направлении, вдоль фильтра, колонне средства установки и перемещения устройства сканирования, причем датчик контроля фокуса текущего расстояния размещен на платформе посредством неподвижного кронштейна. Причем, микрометр может быть снабжен телецентрическим объективом, с возможностью формирования пучка параллельных лучей, а датчик контроля фокуса выполнен в виде лазерного триангуляционного датчика и/или лазерного дальномера, а фотоприемник выполнен в виде цифровой матричной камеры и снабжен би-телецентрическим объективом.
Согласно другому варианту осуществления, устройство сканирования может быть дополнительно снабжено промышленной пульсирующей подсветкой с предустановленной программно-аппаратным образом в микроконтроллере блока управления скоростью пульсации, закрепленной на телецентрическом объективе, а фотоприемник выполнен с короткой выдержкой затвора, сопоставимой со скоростью пульсации, с обеспечением возможности фиксации и записи сканируемого при непрерывном движении колонны вдоль фильтра (при 60 кадрах в секунду).
В соответствии с любым возможным вариантом осуществления заявленного изобретения, средство для размещения фильтра может быть выполнено в виде горизонтально ориентированного стола (поверхности), снабженного вращающимися вокруг горизонтальной оси соприкасающимся роликами удерживающими фильтр на поверхности стола, по меньшей мере, один из которых сопряжен с подсистемой вращения тестируемого фильтра, снабженной двигателем вращения, сопряженным с блоком управления, при этом, вдоль одной из боковых сторон стола размещена подсистема горизонтального перемещения вдоль фильтра колонны с оптическим устройством сканирования, сопряженная с блоком управления. При этом подсистема горизонтального перемещения колонны с оптическим устройством сканирования может быть снабжена двумя направляющими рельсами с зубчатой рейкой, сопряженных с мотором горизонтального перемещения и кареткой, установленной на колонне, а подсистема горизонтального перемещения также может быть дополнительно снабжена концевыми датчиками ограничения перемещения колонны, сопряженные с устройством управления
В другом варианте осуществления средство для размещения фильтра также может быть дополнительно снабжено средством парковки колонны с оптическим устройством сканирования, располагаемым с одной из торцевых сторон и снабженным защитным щитком.
Тогда как в еще одном варианте осуществления, блок управления инспекционной машины предпочтительно сопряжен с монитором и снабжен контроллерами горизонтального и вертикального перемещения оптического устройства сканирования, сопряженными с соответствующими подсистемами управления горизонтальным и/или вертикальным перемещением оптического устройства сканирования; контроллером вращения фильтра, сопряженного с соответствующей подсистемой вращения тестируемого фильтра, средствами управления инспекционной машиной, а также блоками памяти и обработки информации, причем блоки памяти и обработки информации контроллеры блока управления снабжены программно-аппаратным образом предустановленным алгоритмом управления режимами работы оптического устройства сканирования, его фокусировки и обработки светотеневого спектра получаемого изображения посредством пороговой обработки с удалением пространственно-временного шума.
В другом варианте осуществления, предустановленный программно-аппаратным образом алгоритм обработки светотеневого спектра получаемого изображения посредством пороговой обработки с удалением пространственно-временного шума блока обработки информации блока управления может быть выполнен с возможностью выполнения:
- сканирования поверхности фильтра, выполненного с возможностью вращения вокруг продольной оси, с использованием оптического сканера, при этом сканер выполнен с возможностью перемещения в горизонтальном и/или вертикальном направлении, а фильтр вращения вокруг продольной оси;
- фокусировка оптического сканера посредством датчика контроля фокуса по текущим измерениям расстояния оптической системы сканера до поверхности сканируемой поверхности щелевого фильтра и вертикальной подстройки положения сканера при отклонении текущих показаний датчика контроля фокуса от предустановленных в блоке управления значений допустимого фокусного расстояния;
- захвата в цифровом формате изображения поверхности фильтра, включающего один щелевой зазор с краями из металлической проволоки соседних витков фильтра;
- определения границ зазора по предустановленному программно-аппаратным образом алгоритму обработки светотеневого спектра получаемого изображения на основе выделения контуров между светлой и теневой частью изображения посредством пороговой обработки с удалением пространственно-временного шума и одновременным увеличением детализации изображения; а также
- вычисления по предустановленному программно-аппаратным образом алгоритму величины щелевого зазора по выделенным границам на основе определения площади щелевого зазора между границами и вычисления среднего значения щелевого зазора по ширине щели в пикселях с преобразованием в метрические единицы с учетом коэффициента масштабирования, являющегося показателем разрешающей способности оптической системы сканера.
Краткое описание чертежей.
Заявленная группа изобретений представлена на следующих иллюстрирующих материалах:
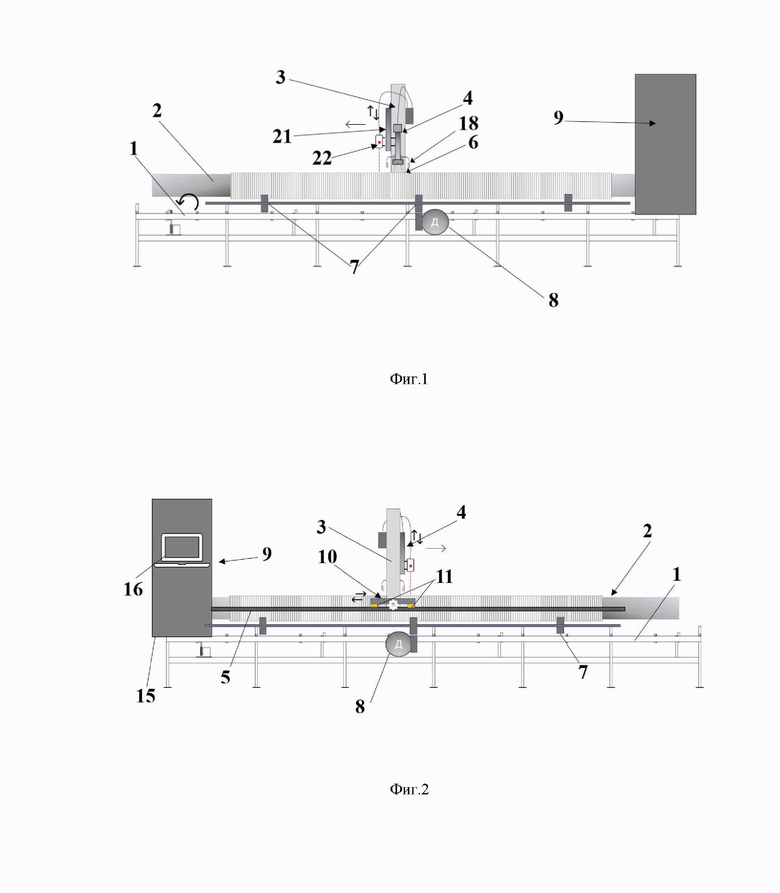
фиг. 1 - схемное представление инспекционной машины согласно заявленному изобретению, фронтальный вид, вдоль горизонтально размещенного фильтра.
Фиг. 2 - схемное представление инспекционной машины согласно заявленному изобретению, тыльный вид, вдоль горизонтально размещенного фильтра;
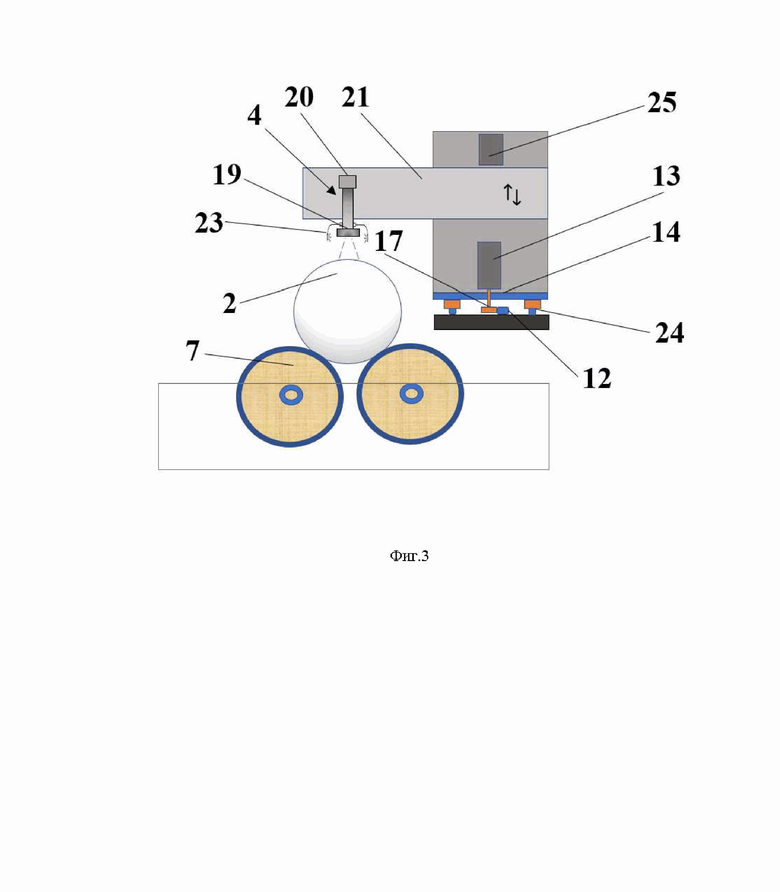
Фиг. 3 - схемное представление инспекционной машины согласно заявленному изобретению, вид со стороны торца, поперек оси тестируемого фильтра;
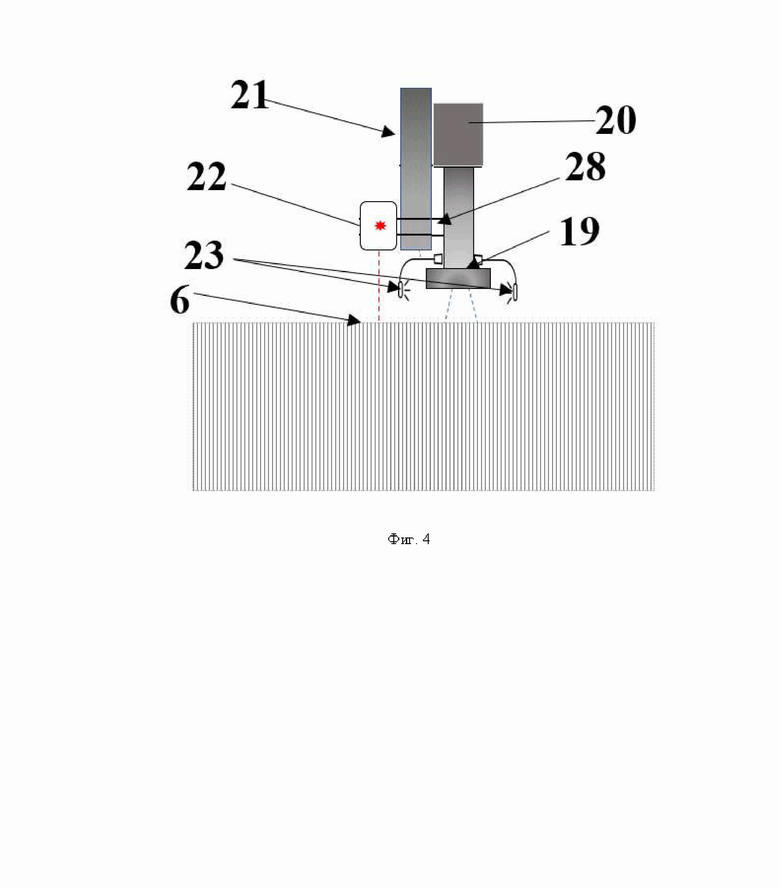
Фиг. 4 - схемное представление оптического сканера согласно заявленному изобретению;
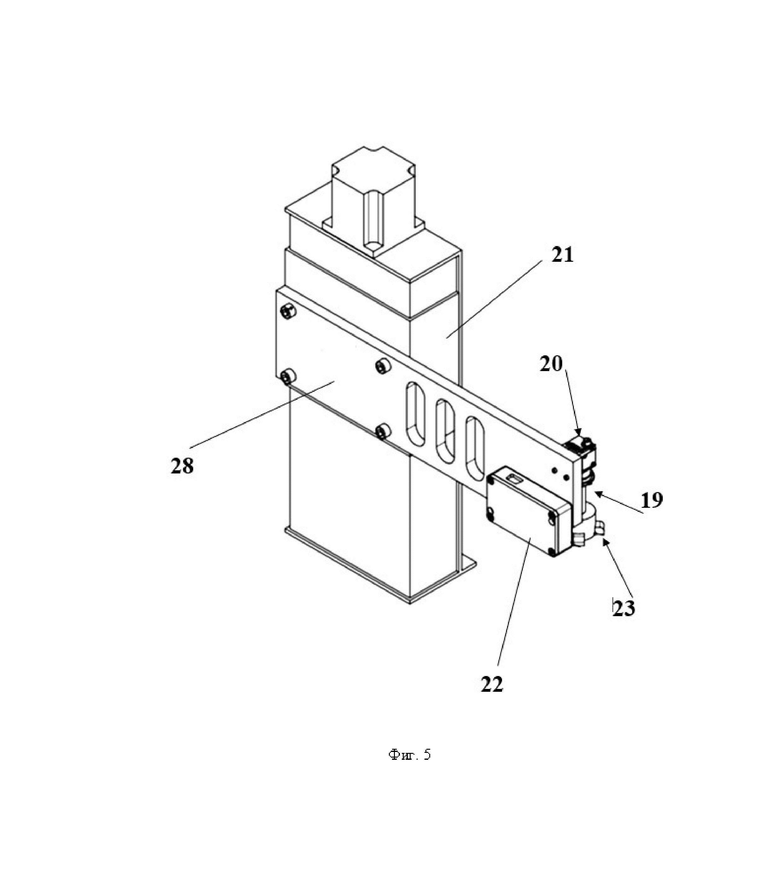
Фиг. 5 - общи вид передвижной платформы с оптическим сканером и датчиком контроля фокусного расстояния;
Фиг. 5 - схемное представление щелевой поверхности фильтра;
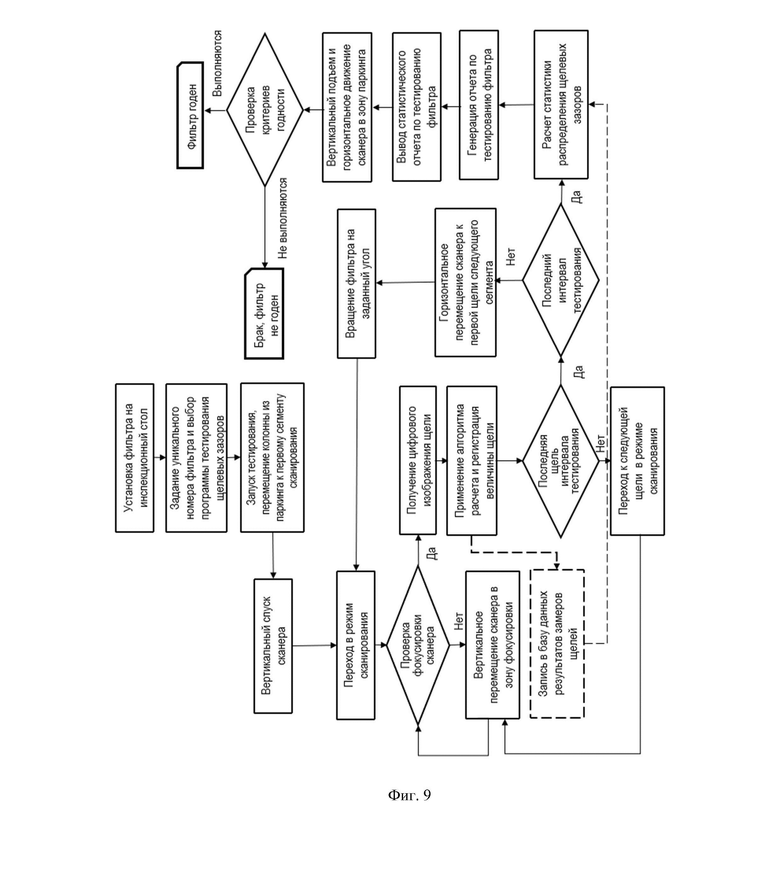
Фиг. 6 - пример работы операторов эрозии и дилатации: а) исходное изображение; b) шаблон (центр - ведущий элемент); c) результат дилатации; d) результат эрозии;
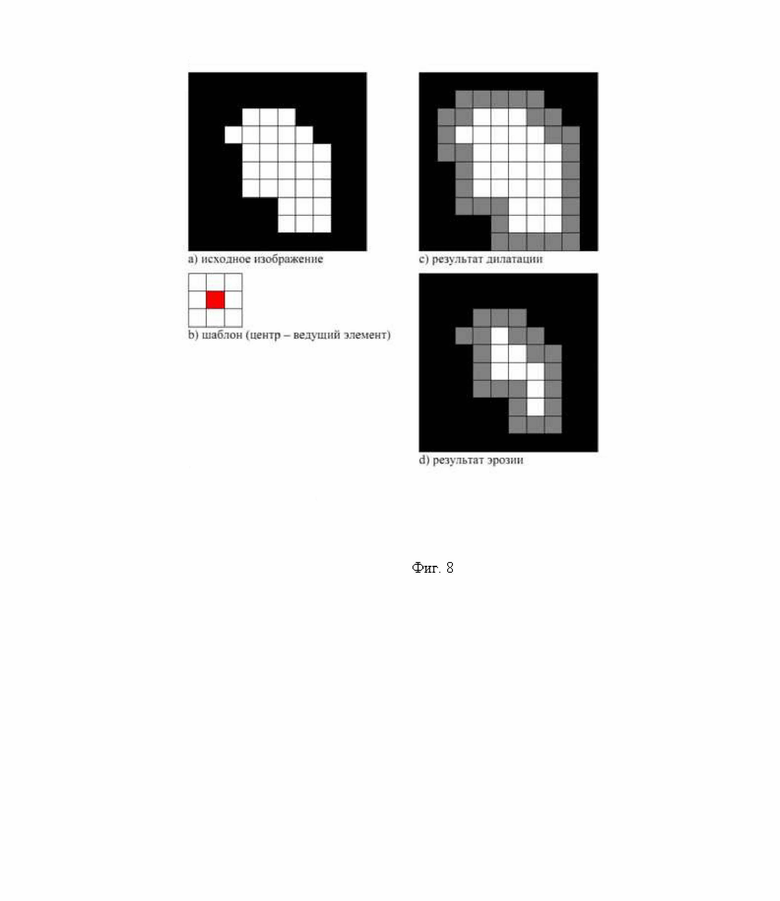
Фиг. 7 - пример работы алгоритма поиска границ зазора в соответствии с заявленным изобретением: а) входное изображение; б) результат работы алгоритма.
Фиг. 8 - схема работы инспекционной машины в режиме тестирования фильтров согласно заявленному изобретению.
Следует отметить, что прилагаемые чертежи иллюстрируют только часть некоторых из наиболее предпочтительных вариантов осуществления изобретения и не могут рассматриваться в качестве ограничений его содержания, которое включает и другие варианты его осуществления.
Осуществимость изобретения.
Согласно представленным на схемах фиг. 1-8 примеру осуществления заявленного решения, инспекционная машина состоит из средства для размещения фильтра 2, выполненного в виде горизонтально ориентированной поверхности инспекционного стола 1 и передвижной вдоль фильтра колонны 3 с оптическим сканером 4 (сканером) поверхности фильтра, закрепленным на кронштейне, установленным на подвижной платформе (каретке), размещенной на передвижной колонне. Согласно представленному примеру осуществления, колонна выполнена вертикально ориентированной и по своему назначению является средством установки и перемещения оптического сканера, обеспечивая его перемещение. как в горизонтальном, так и вертикальном направлении. Для реализации данной возможности, колонна 3 и стол 1 снабжены ответными элементами средства передвижения 5 колонны в горизонтальном направлении вдоль фильтра 2, а колонна дополнительно снабжена средствами перемещения в вертикальном направлении (вдоль колонны, в вертикальном направлении) оптического сканера 4.
Для обеспечения продольного перемещения оптического сканера вдоль фильтра, согласно заявленному решению, инспекционная машина снабжена подсистемой горизонтального 10 перемещения колонны. Подсистема 10 сопряжена с блоком управления, обеспечивающим перемещение колонны с заданными программно-аппаратным образом параметрами сканирования, включая параметры перемещения оптического сканера. Так, согласно представленному примеру осуществления (фиг. 2 и3), подсистема горизонтального 10 перемещения колонны снабжена размещенными на поверхности инспекционного стола продольно, вдоль одной из ее боковых сторон, направляющими рельсами 11, снабженными зубчатой рейкой 12, сопряженной с мотором 13 горизонтального перемещения, и сопряженными с ними ответными средствами перемещения, установленными на колонне, например, выполненными в виде каретки 14 (фиг. 2, 3) . Подсистема горизонтального 10 перемещения колонны соединена с блоком управления инспекционной машины, с возможностью управления программно-аппаратным образом режимом перемещения установленной на колонне каретки посредством запуска мотора 13 при получении прямой команды оператора на запуск перемещения колонны, и/или наступлению предустановленного программно-аппаратным образом события, вызывающего автоматический запуск соответствующего событию режима перемещения колонны. Например, в качестве такого события может быть использован захват цифрового изображения щелевого зазора фотоприемником оптического сканера. Колонна с оптическим сканером перемещается на каретке 14, например, оснащенной четырьмя линейными шариковыми подшипниками 24 (фиг. 3), передвигающимися вдоль фильтра по двум направляющим рельсам 11 с помощью зубчатой рейки 12, закрепленных на горизонтальной панели инспекционного стола (фиг. 3) за счет вращения шестеренки 17 мотора 13 горизонтального перемещения. Такое расположение каретки 14 позволяет колонне оптического сканера легко перемещаться вдоль всего тестируемого фильтра. При этом выбор перемещения с помощью зубчатой рейки обеспечивает не только точность перемещения колонны вдоль фильтра в заданном программным образом режиме, но и обеспечить надежное передвижение колонны, с минимальными рисками создания аварийных ситуаций.
Поскольку противопесочный фильтр имеет навивку по всей внешней поверхности, для обеспечения актуального сканирования и контроля ширины межвитковых зазоров по всей поверхности фильтра, необходимо помимо продольного перемещения колонны с оптическим сканером обеспечить возможность осуществления поворота фильтра вокруг продольной оси. Для решения данной задачи, согласно заявленному изобретению, инспекционный стол 1 снабжен роликами 7 вращения, размещенными по длине фильтра в виде групп или одиночных, соприкасающихся с фильтром, роликов. Наличие роликов вращения, встроенных в конструкцию инспекционного стола позволяет решить две задачи: позиционирования и удержания фильтра на поверхности стола в заданном положении в процессе измерения величины межвитковых зазоров щелевых фильтров, а также поворота фильтра на заданный угол вокруг продольной оси в процессе сканирования поверхности фильтра, обеспечивая тем самым возможность осуществления сканирования всей внешней поверхности фильтра в рамках одного или нескольких процессов измерения и контроля состояния щелевых зазоров противопесочного фильтра, путем их измерения, как в продольном направлении, так и по контуру внешней поверхности фильтра, что ускоряет процесс финишного контроля состояния щелевых зазоров противопесочных фильтров и повышает его эффективность. Для обеспечения поворота фильтра, по меньшей мере, один из вращающихся роликов 7 сопряжен с подсистемой вращения тестируемого фильтра, снабженной двигателем вращения 8, сопряженным с блоком управления 9 инспекционной машины(фиг. 1, 2). В представленном примере осуществления реализованная программно-аппаратным образом подсистема вращения фильтра (на схемах не показана), на основании инициируемых команд блока управления для осуществления поворота фильтра запускает двигатель вращения 8, момент вращения которого передается через систему соприкасающихся роликов на фильтр, вызывая поворот последнего на заданный угол. Блок управления 9 снабжен программно-аппаратными средствами отслеживания, фиксации, запоминания и последовательного изменения угла поворота фильтра вдоль продольной оси, а также формирования управляющих команд (сигналов) для инициации работы двигателя вращения в заданном (предустановленным программно-аппаратным или ручным образом в памяти микроконтроллера блока управления) режиме. При этом угол поворота фильтра может отслеживаться блоком управления любым известным из уровня техники способом, например, расчетным путем исходя из массогабаритных характеристик фильтра, а также электрических и механических характеристик двигателя вращения, либо по показаниям внешних датчиков, сопряженных с осью вращения фильтра и блоком управления инспекционной машины, а также любым иным, применимым в данной области техники способом.
Согласно заявленному изобретению, конструкция инспекционной машины предполагает, как последовательное перемещение оптического сканера вдоль фильтра, в том числе, на увеличенной горизонтальной и вертикальной скорости перемещения оптического сканера в режиме прогона сканера между участками сканирования, движения в режиме сканирования фильтрующей поверхности 6, так и его дискретное перемещение с остановками в точках, которые соответствуют аномальным отклонениям величины щелевого зазора фильтра. При этом, каждый режим сканирования и измерений щелевых зазоров включает этапы установки каретки колонны к начальной точке сканирования и ее перевод в режим парковки колонны, т.е. ее перемещение к месту, в котором колонна находится в неработающем состоянии, по завершению заданного процесса сканирования. Место парковки может быть выполнено любым, известным из уровня техники способом, например, так, как представлено на схеме фиг. 2 примера осуществления заявленного изобретения. В данном примере, место парковки расположено вдоль одной из торцевых сторон инспекционного стола, в начале пути, сформированного ответными элементами средства передвижения колонны в горизонтальном направлении 5, например, выполненными в виде рельс. При этом, как следует из представленного на схеме фиг. 2 примера осуществления, место парковки может быть оборудовано щитком 15 парковки защищающим колонну оптического сканера от нежелательных механических воздействий на оборудование сканера при операциях установки фильтра.
Для обеспечения безопасности эксплуатации инспекционной машины и реализации режима возврата колонны с оптическим сканером к месту парковки или в место начала сканирования, подсистема горизонтального перемещения, согласно представленному примеру осуществления, может быть снабжена предотвращающими перемещение колонны за пределы инспекционного стола концевыми датчиками (на чертежах и схемах не представлены), сопряженными с блоком управления. Концевые датчики (на схемах не показаны) контролируют перемещение колонны и при достижении предустановленной границы опасной зоны инициируют и направляют соответствующий предустановленный сигнал (команду) в блок управления, в соответствии с которым блок управления, в свою очередь, инициирует управляющий сигнал (команду) остановки линейного перемещения колонны вдоль рельсового пути и/или перемещения колонны в обратном направлении, например, к месту ее парковки.
Управление движением колонны, согласно заявленному решению, осуществляется программно-аппаратным образом, в соответствии с предустановленным в микроконтроллере или блоке памяти блока управления инспекционной машины алгоритмом перемещения, где команды на смену режима перемещения инициируются либо по прямому выбору оператора, либо в автоматическом режиме при наступлении предустановленного события, распознанного блоком управления. Как следует из схемного представления фиг. 2, блок управления, например, его системный блок (на схемах не показан) инспекционной машины может быть сопряжен со щитком парковки инспекционной машины и снабжен сенсорным экраном 16. При этом все управление машиной осуществляется через графический интерфейс сенсорного экрана блока управления инспекционной машины. Представленный на схеме 2 пример осуществления является одним из возможных вариантов осуществления данного элемента конструкции инспекционной машины, который может быть решен любым иным, известным из уровня техники способом.
Сканирование поверхности противопесочного фильтра и фотофиксация его межвитковых щелевых зазоров осуществляется оптическим сканером 4, подвижно закрепленным на колоне посредством, установленного на передвижную платформу 21 (каретку) кронштейна 28. Передвижная платформа сопряжена со средствами ее перемещения в вертикальном направлении корпуса колонны.
Согласно заявленному решению, оптический сканер 4 выполнен в виде оптического блока, снабженного последовательно расположенными по оптической оси фотоприемника 20 с объективом 19. В качестве фотоприемника может использоваться, например, применяемые в системах машинного зрения цифровые матричные фотокамеры с CMOS (КМОП) сенсорами, снабженные интерфейсом передачи данных (USB 3.0, GigE, Camera Link) с разрешением не менее 5 Мпикс, оснащенные алгоритмами оптимизации изображения. Например, в качестве такой фотокамеры могут использоваться цифровые фотокамеры промышленного зрения компании Basler AG серии ace или ace2, в том числе, оснащенные функцией, реализующий встроенный программно-аппаратным образом алгоритм оптимизации изображения (например, фотокамера серии Basler ace: acA2440-75um), обеспечивающий повышение качества изображения во время съемки на полной скорости за счет комбинации функций дебайеризации 5×5, сглаживания цветов, шумоподавления и увеличения резкости. Применение такого алгоритма обработки изображения в ходе съемки позволяет получить изображения более высокого качества непосредственно с камеры, не создавая дополнительной нагрузки на ЦП. За счет наличия интерфейса обмена данными может быть также решена задача настройки алгоритма оптимизации изображения фотокамеры под решение конкретных задач посредством предустановленного в блоке управления инспекционной машины программного обеспечения, сопряженного посредством интерфейса с микроконтроллером фотокамеры.
Последовательно сопряженный с фотокамерой объектив для обеспечения качества получаемых (захватываемых) фотокамерой изображений, выбирается из условия обеспечения высокого качества получаемых изображений (с высоким разрешением), поддерживаемого на всем протяжении фотофиксации изображения в процесс сканирования поверхности фильтра. Учитывая, что фотофиксация осуществляется в режиме фактически непрерывного сканирования вдоль фильтра и по всей его внешней поверхности, цифровая камера фотоприемника, предпочтительно, снабжена би-телецентрическим объективом 19, например, AZURE-6510TSM. Использование телецентрической оптики для фотоприемника в конструкции оптического сканера позволяет повысить точность измерений, поскольку телецентрическая оптика проецирует и принимает лучи, движущиеся строго параллельно оптической оси оптической системы сканера, что позволяет формировать более четкое изображение на фотоприемнике при существенном снижении дифракционных эффектов на границах зазоров, образуемых витками фильтра по его сканируемой поверхности и оптических искажений, вызванных погрешностью (неидеальностью) оптики.
Согласно заявленному изобретению, в одном из предпочтительных вариантов его реализации, источник излучения 18 выполнен в виде источника промышленной подсветки 23 (подсветка) (фиг. 3), закрепляемой по контуру объектива фотоприемника. Освещение играет важную роль в системах машинного зрения, поскольку в сочетании с другими компонентами, такими как цифровая фотокамера и телецентрический объектив, обеспечивает максимально высокое и воспроизводимое качество захватываемого изображения. Промышленная подсветка 23 создает дополнительный контраст изображения щели, повышая четкость изображения и точность измерений контролируемых характеристик зазора. При этом использование в фотоприемнике оптического сканера высокопроизводительного микропроцессора и CMOS-сенсора, например, с частой кадров не менее 75 fps, а также телецентрического объектива в сочетании с пульсирующей промышленной подсветкой обеспечивает повышение точности сканирования и обработки изображений межвитковых зазоров на более высокой скорости, чем известные из уровня техники цифровые сканеры, обеспечивая поддержание высокого качества съемки в процессе непрерывного движения оптического сканера вдоль фильтра и/или по его поверхности при повороте фильтра.
В другом варианте осуществления оптический сканер может быть выполнен в виде лазерно-оптического модуля, включающего источник излучения выполненный в виде оптического источника зондирующего лазерного излучения, например, в виде лазерного оптического микрометра, который, в возможных вариантах осуществления заявленного решения, может быть дополнительной снабжен телецентрическим объективом, с возможностью формирования пучка параллельных лучей для повышения точности позиционирования и четкости захватываемого изображения сканируемой поверхности фильтра. При этом оптический микрометр может быть снабжен пульсирующей промышленной подсветкой, располагаемой вокруг объектива, обеспечивая тем самым возможность скоростного сканирования с высокой четкостью.
Качественное и точное измерение щелевого зазора возможно при получении четкого сфокусированного изображения щели. Ограниченность глубины фокуса телецентрического объектива оптического сканера и изменение профиля поверхности фильтра, который может иметь сложное формообразование, с изменяемой высотой фильтра по его длине, например, в местах расположения стыковочных муфт, что приводит к необходимости корректировки положения оптического сканера в пределах фокусного расстояния от объектива фотоприемника до поверхности фильтра с щелевыми зазорами. Согласно заявленному решению, для обеспечения точной фокусировки используют датчик контроля фокусного расстояния (фокуса), в качестве которого, например, может быть использован лазерный дальномер, установленной на подвижной платформе оптического сканера.
Таким образом, при любом варианте осуществления заявленного изобретения, канал измерения оптического сканера, содержит источник излучения в виде промышленной подсветки и/или микрометра с телецентрическим объективом, последовательно расположенные фотоприемник с телецентрическим объективом, а также лазерный датчик фокусного расстояния (фокуса) оптического сканера до сканируемой поверхности фильтра, соединенные с блоком обработки информации блока управления инспекционной машины, снабженного программно-аппаратными средствами фокусировки оптического сканера по отклонению от предустановленного значения текущих показаний датчика 22 контроля фокуса (фокусного расстояния) сканера до поверхности фильтра.
Возможность подстройки положения оптического сканера в пределах, предустановленного для используемого в конструкции сканера фотокамеры и сопряженного с ней телецентрического объектива диапазона значений допустимого фокусного расстояния, осуществляется, как было выше отмечено путем перемещения кронштейна с оптическим сканером в вертикальной плоскости путем перемещения передвижной платформы 21 (каретки), на которой установлен кронштейн 28 вдоль корпуса колонны 3. Перемещение передвижной платформы вдоль колонны по высоте, может быть реализовано любым, известным из уровня техники способом, применимым к данного рода устройствам, например, посредством мотора вертикального перемещения 25, соединенного с блоком управления, и каретки 21, сопряженной с двумя направляющими рельсами с зубчатой рейкой, располагаемых вдоль колонны в вертикальном направлении, с возможностью перемещения передвижной платформы (каретки) вдоль них (фиг. 3). Данный вариант реализации средства перемещения передвижной платформы 21 в вертикальном направлении, вдоль корпуса колонны является лишь одним из возможных вариантов его осуществления. Однако, при любом варианте осуществления средств перемещения передвижной платформы 21, ее перемещения осуществляются в автоматическом режиме, посредством непрерывного отслеживания блоком управления программно-аппаратным образом текущих показаний датчика контроля 22 фокусного расстояния (датчик контроля), их сопоставления с предустановленными в памяти блока управления значениями для текущих измерений и модели оптического сканера, и формирования в автоматическом режиме управляющих команд на мотор или иное устройство управления перемещением каретки платформы посредством средств перемещения передвижной платформы в вертикальном направлении, вдоль корпуса колонны.
Так, например, в одном из вариантов осуществления заявленного решения, для осуществления процесса сканирования поверхности фильтра и измерения величины межвитковых зазоров фильтра, предварительно оптическую ось сканера ориентируют под углом 90° градусов по отношению к касательной к проволочной поверхности фильтра, с размещением телецентрического объектива, сопряженного с фотокамерой, предпочтительно, на расстоянии 65 мм от сканируемой поверхности, что позволяет обеспечить максимально точную фокусировку оптики и четкость получаемого изображения. При этом положение объектива оптического сканера, а именно телецентрического объектива фотоприемника, позиционируется таким образом, чтобы сканируемый участок попадал в диапазон глубины резкости объектива цифровой фотокамеры оптического сканера с точностью 1,5 мм. Для достижения данного эффекта в качестве датчика контроля 22 фокуса (фокусного расстояния) по текущему расстоянию сканера до поверхности фильтра, предпочтительно, используют лазерный дальномер (лазерный триангуляционный датчик), обладающий наиболее высокой точностью определения расстояния до поверхности измерения. Датчик контроля фокусного расстояния размещают на неподвижном кронштейне 28 передвижной платформы 21 (фиг. 4, 5), предпочтительно, перед оптическим сканером по ходу перемещения колонны в процессе сканирования, поскольку данные, получаемые блоком управления от датчика 22, используются для фокусировки оптического сканера, подстройкой его положения по высоте. При регистрации блоком управления, сопряженным с оптическим сканером, смещения фильтра более чем на 1,5 мм относительно датчика 22, на контроллер блока управления инспекционной машины программно-аппаратным образом и на основе предустановленного в блоке памяти контроллера (на схемах не показан) алгоритма, подается команда на изменение расстояния от оптического сканера до поверхности фильтра 6 таким образом, чтобы расстояние между оптическим сканером и фильтром сохранялось постоянным по длине и внешнему контуру фильтра на всем протяжении сканирования и контроля параметров межвитковых щелевых зазоров. Таким образом, обеспечиваются оптимальные условия для осуществления захвата и фотофиксации изображения каждого контролируемого межвиткового щелевого зазора фильтра по всей его поверхности с заданной скоростью сканирования, без потери качества фотосъемки.
Возможность подстройки положения оптического сканера в вертикальной плоскости в автоматическом режиме позволяет осуществлять перемещение сканирующего устройства вдоль фильтра с изменяемым диаметром по его длине, осуществлять контроль фокусировки телецентрической оптики в процессе сканирования поверхности фильтра, а также выполнять измерения щелевых зазоров фильтра разных диаметров с высокой точностью, без остановки процесса сканирования.
Получаемый фотоприемником от сканера кадр цифрового изображения щелевого зазора, а настройка сканера позволяет захватить в кадр только одну щель, далее анализируется на предмет выделения краев щели.
На изображении фиг. 6 представлено схемное представление щелевой поверхности фильтра, которая состоит из последовательности витков проволоки 26 и образующихся между ними щелевыми зазорами 27. Для выявления в режиме сканирования и измерения щелевых зазоров в соответствии с заявленным изобретением применяется реализованный программно-аппаратным образом алгоритм, позволяющий с высокой точностью проводить аппроксимацию для исследуемых объектов распознанных контуров различной формы. Точность замеров с помощью данного алгоритма определяется, главным образом, качеством изображения контура объекта, поскольку данный алгоритм работает на основе выделения контуров между светлой и теневой частью посредством пороговой обработки. Определить контур с высокой точностью бывает сложно, особенно используя «стандартную» подсветку. Для минимизации ошибок при распознавании контура межвиткового зазора, заявленное решение работает на основе модифицированного под текущие задачи интеллектуального алгоритма, использующего математическую модель человеческого глаза. Алгоритм осветляет спектр изображения и корректирует суммарную яркость с помощью адаптации локальных яркостей. Другой важной особенностью реализованного программно-аппаратным образом в составе заявленного решения инспекционной машины алгоритма распознавания контура щелевого зазора фильтра, является способность к удалению пространственно-временного шума с одновременным увеличением детализации изображения.
Так на первом этапе пиксели исходного изображения, полученного в результате сканирования, непосредственного микроконтроллером блока сканирования и/или блока управления, посредством предустановленного программного алгоритма разделяют на 2 кластера по интенсивности цвета (бинаризации) по фиксированному порогу следующим образом:

Где параметр threshold по сути является параметром контрастности светотеневого изображения, и подбирается эмпирически, путем калибровки, исходя из особенностей матрицы цифровой камеры фотоприемника, интенсивности подсветки и отражающей способности щелевых краев щелевых зазоров фильтра. Например, в частном случае реализации данный параметр может быть выбран равным 30, что позволяет обеспечить высокий уровень чувствительности и точности при определении границ контура межвиткового зазора фильтра.
Для удаления шумовой составляющей, на следующем этапе применяют блок из двух идущих подряд операторов эрозии и дилатации (в частном случае реализации, для представленного примера осуществления размер ядра - 7х7 пикселей). Пример работы данного алгоритма представлен на изображениях фиг. 8. В результате такой последовательной обработки полученное изображение разделяется на 2 кластера - зона щели и зона проволоки, например, так, как представлено на изображениях фиг. 7, где фиг. 7 а) - входное, полученное изображение, а фиг. 7 б) - изображение, полученное в результате обработки. Очевидно, указанный способ обработки полученного фотоприемником изображения сканируемой поверхности позволяет существенно увеличить контрастность краев (границ) фиксируемых на изображениях контурных участков, откорректировать локальные яркости и фон. Данное свойство особенно полезно при засветках, переотражениях или наоборот недостаточной освещенности. Алгоритм определения границ щелевого зазора обеспечивает возможность задания параметра контрастности светотеневого изображения, который может задаваться на этапе начальной калибровки показаний замеров щелевых зазоров.
По факту определения границ контура зазора, на основании предустановленного программно-аппаратным образом алгоритма осуществляют измерение щелевого зазора. Для это цели осуществляют определение его площади между выделенными границами щели в пикселях, и вычисляют среднее значение щелевого зазора по ширине щели в пикселях, с последующим переводом данного значения в метрические единицы микроны. Последнее действие осуществляют уже исходя из разрешения цифровой матричной камеры. Например, в частном случае осуществления заявленного решения, среднее значение щелевого зазора по ширине щели может быть определено из следующего соотношения, определимого исходя из посчитанного числа «черных пикселей» к общему числу пикселей по горизонтали:

Коэффициент 5,1 получен эмпирическим путем для преобразования итогового результата в метрические единицы (микрометры). Данный коэффициент является показателем разрешающей способности оптической системы (в частном случае, рассматриваемого примера осуществления, один пиксель изображения соответствует квадрату стороной 5,1 мкм)
Таким образом, способ измерения и контроля щелевых зазоров противопесочных фильтров согласно заявленному изобретению осуществляется следующим образом.
На изображении блок-схемы фиг. 9 представлена схема работы инспекционной машины согласно заявленному решению в режиме автоматического тестирования фильтров.
Не первом этапе производится установка фильтра на инспекционный стол, при этом колонна сканера находится в зоне парковки. Далее программно-аппаратным образом, посредством предустановленного интерфейса пользователя, вводят информацию, касающуюся индивидуальных характеристик тестируемого фильтра (номер фильтра, длина, диаметр, начальный отступ от края базовой трубы, программа тестирования и т.п.), которые обрабатываются блоком управления в соответствии с предустановленным программно-аппаратным образом алгоритмом. На основании указанных данных и предустановленному алгоритму их обработки осуществляют выбор предустановленной программы тестирования щелевых зазоров противопесочных фильтров. Программы тестирования щелевых зазоров могут различаться количеством сегментов фильтра, по которым производятся замеры. Можно, например, выделить стандартную программу тестирования, по которой вычисляются величины, к примеру, 200 щелей по 4 сегментам, разнесенным по всей длине фильтра с поворотом фильтра на 90 градусов между сегментами. Программа сплошного тестирования предполагает режим тестирования щелевых зазоров на всю длину фильтра по одному направлению. Можно реализовать и другие варианты программ тестирования, которые будут предусматривать разные сценарии сканирования и вращения фильтра по сегментам длины фильтра.
На следующем этапе после запуска выбранной программы тестирования, перемещают колонну с размещенным на нем оптическим сканером до положения первой щели первого сегмента тестирования зазоров. Перемещение колонны осуществляется с поднятым положением сканера для безопасности работы машины. Для этого перемещают передвижную платформу с установленным на ней сканирующим устройством вдоль колонны вверх по вертикали
При достижения первого участка сканирования платформу со сканирующим устройством опускают до сканируемой фильтра и осуществляют запуск режима сканирования, в автоматическом или ручном формате управления.
В этом режиме, на перво этапе осуществляют проверку оптической фокусировки сканера щелевой поверхности фильтра. Фокусировка осуществляют путем вычисления расстояния до поверхности фильтра с помощью лазерного датчика контроля фокуса по текущему расстоянию телецентрического объектива фотокамеры оптического сканера до сканируемой поверхности. По предустановленным в памяти микроконтроллера блока управления настроечным параметрам инспекционной машины фокус определяется попаданием измеренного датчиком расстояния от объектива сканирующего устройства до сканируемой поверхности в предустановленный в системе интервал резкости расстояния (фокусного расстояния) до поверхности фильтра. Если расстояние не попадает в заданный интервал, осуществляют корректировку положения сканирующего устройства с помощью системы вертикального перемещения оптического сканера посредством спуска-подъема передвижной платформы с установленным на ней сканирующим устройством до попадания указанного расстояния в заданный интервал. По завершению настройки фокуса сканирующего устройства, регистрируемого блоком управления по регистрируемым данным измерения датчика контроля фокусного расстояния, система в автоматическом режиме или по запуску оператором формирует на подсистемы перемещении колонны и оптический сканер управляющие сигналы запуска режима сканирования поверхности фильтра на текущем участке и фиксирует получаемые фотокамерой оптического сканера цифровые изображение щелевого зазора, передаваемые по линиям коммутации в блока обработки данных блока управления системы, где осуществляется обработка полученного изображения в соответствии с предустановленными программно-аппаратными образом алгоритмами. Поскольку лазерный луч датчика текущего расстояния до поверхности фильтра может попадать в щелевой зазор, то расстояние, которое он измеряет может отличаться от реального расстояния до поверхности фильтра. В этом случае применяется способ исключения показаний датчика в моменты, когда он попадает в щелевые отверстия, на основе алгоритма осредненных данных по расстояниям, регистрируемых лазерным датчиком в ходе сканирования поверхности фильтра. При этом предполагается, что щелевое отверстие меньше значения шага между границами двух последовательных щелей.
Полученное таким образом изображение далее обрабатывают программно-аппаратным образом, на основе предустановленного в микроконтроллере фотоприемника и/или блока управления инспекционной машины вышеуказанного порогового алгоритма распознавания границ щелевого зазора и вычисляют значение величины зазора. Полученное значение автоматически фиксируют в журнале выполненных замеров в базе данных приложения блока управления инспекционной машины. Далее осуществляют проверку на последнюю щель интервала сканирования и, если она не достигнута, производят переход к следующей щели в режиме сканирования. При достижении перемещаемой вдоль фильтра колонной с установленным оптическим сканирующим устройством последней щели интервала сканирования осуществляют проверку достоверности данного факта. Если интервал не последний, то производится горизонтальное перемещение колонны сканера до первой щели следующего сегмента или интервала тестирования.
В том случае, если программа тестирования предполагает выполнение вращения фильтра между интервалами, выполняют необходимое вращение фильтра до сканирования первой щели нового интервала. Вращение фильтра может быть осуществлено любым известным из уровня техники способом, обеспечивающим контроль поворота на заданный угол, например, посредством использования сопряженного с контроллером блока управления и средством порота фильтра шаговым двигателем.
В рамках осуществления тестирования в соответствии с заявленным решением возможна реализация режима регистрации аномальных зазоров щелевых фильтров. Если данная опция включена в процедуру тестирования, то при расчете величины щели дополнительно осуществляют проверку ее значения на аномальное значение. Обычно это означает, что величина зазора отличается от номинала более чем на определенную величину, предустановленную в системе. В случае обнаружения аномальной щели машина останавливает процесс сканирования, а оператор инспекционной машины проверяет факт наличия дефектной щели. В случае подтверждения дефекта оператором тестирование фильтра прерывается, а фильтр бракуется по причине выявления данного дефекта.
Процесс тестирования продолжают до регистрации последней щели последнего сегмента тестирования. После завершения программы тестирования блок управления в автоматическом режиме или по указанию оператора, например, посредством выбора соответствующей операции через интерфейс управления предустановленным программным обеспечением процесса тестирования, инициализируют статистический анализ распределения щелевых зазоров фильтра с подсчетом средних значений зазоров и среднеквадратичных отклонений. При этом статистический анализ результатов замеров щелевых зазоров осуществляют с учетом предустановленных в блоке памяти микроконтроллера блока управления параметров допустимых отклонений осуществленных замеров. Таким образом, осуществляется фильтрация полученных результатов замеров, с выявлением определенной части замеров, которая может быть отнесена к дефектным. Эти замеры исключают программно-аппаратным образом из общего числа проведенных замеров. На основе полученных данных осуществляют генерирование отчета по тестированию. В этом отчете осуществляется проверка заданных по программе критериев годности статистических значений распределения щелевых зазоров. Согласно указанной проверке, формируют вывод о годности или негодности фильтра по качеству щелевых зазоров. В конце процедуры тестирования производят вертикальный подъем сканера, и колонна сканера перемещается в зону парковки.
Заявленная группа изобретений, характеризующая устройство инспекционной машины и способ тестирования щелевых зазоров противопоточных фильтров на ее основе обеспечивает высокую точность измерений, и простоту конструкции за счет возможности перемещения сканирующего устройства как в горизонтальной, так и вертикальном направлении, с возможностью контроля нахождения сканирующего устройства в процессе сканирования на фокусном расстоянии от поверхности фильтра, контролируемого дополнительным датчиком текущего расстояния, а использование в составе конструкции оптического сканирующего устройства телецентрической оптики и промышленной подсветки, позволяет с большей точностью использовать заявленные в составе способа тестирования программно-аппаратные алгоритмы распознавания светотеней изображения щелей для вычисления их размера и собственно сам процесс вычисления значения щелевого зазора. Простота системы перемещения и позиционирования сканера, экономят время на осуществления данных действий и за счет точности позиционирования повышают точность измерений. Данная конструкция надежна и долговечна при ее практическом применении.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И СИСТЕМА ДОСМОТРА АВТОМОБИЛЬНОГО И ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТА БЕЗ ПРОНИКНОВЕНИЯ ВНУТРЬ ГРУЗОВОГО ПРОСТРАНСТВА | 2013 |
|
RU2610930C2 |
| Способ получения виртуальных моделей сложнопрофильных криволинейных поверхностей | 2023 |
|
RU2813465C1 |
| АВТОМАТИЧЕСКИЙ ПРОПУСКНОЙ МОДУЛЬ АВТОМАТИЗИРОВАННОЙ СИСТЕМЫ КОНТРОЛЯ | 2019 |
|
RU2696898C1 |
| СПОСОБ ВИЗУАЛЬНО-ИЗМЕРИТЕЛЬНОГО НЕРАЗРУШАЮЩЕГО КОНТРОЛЯ КАЧЕСТВА СВАРНОГО СОЕДИНЕНИЯ, ПРЕИМУЩЕСТВЕННО ПОЛУЧЕННОГО СПОСОБОМ СВАРКИ ТРЕНИЕМ С ПЕРЕМЕШИВАНИЕМ, И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2020 |
|
RU2748861C1 |
| УСТРОЙСТВО ДЛЯ ОПТИЧЕСКОГО ЧТЕНИЯ ДОКУМЕНТОВ | 2022 |
|
RU2781211C1 |
| ПРОМЫШЛЕННЫЙ СКАНЕР | 2001 |
|
RU2206183C1 |
| СПОСОБ СЧИТЫВАНИЯ МАРКИРОВОЧНЫХ МЕТОК СКАНЕРОМ, СОЗДАЮЩИМ ДОПОЛНИТЕЛЬНЫЙ РАССЕЯННЫЙ СВЕТОВОЙ ПОТОК ДЛЯ РАСШИРЕНИЯ ЗОНЫ СЧИТЫВАНИЯ СКАНЕРА | 2012 |
|
RU2481634C1 |
| МОДУЛЬ ПЕРЕМЕЩЕНИЯ КОНТЕЙНЕРОВ В КАМЕРЕ ДЛЯ ИНКУБАЦИИ БИОЛОГИЧЕСКИХ ОБРАЗЦОВ | 2023 |
|
RU2812238C1 |
| БЛОК ДАТЧИКА ДЛЯ КОНТРОЛЯ ПОВЕРХНОСТИ ОБЪЕКТА И СПОСОБ ДЛЯ ОСУЩЕСТВЛЕНИЯ ЭТОГО КОНТРОЛЯ | 1998 |
|
RU2186372C2 |
| КАМЕРА ДЛЯ ИНКУБАЦИИ БИОЛОГИЧЕСКИХ ОБРАЗЦОВ | 2023 |
|
RU2813445C1 |
Изобретение относится к средствам автоматического контроля конструктивных параметров, а именно к способу и устройству измерения и контроля щелевых отверстий противопесочных фильтров, используемых в горной промышленности. Технический результат, достигаемый заявленным решением, заключается в повышении точности и скорости выполнения измерений, при упрощении конструкции и повышении ее надежности. Технический результат достигается использованием инспекционной машины финишного контроля и измерения щелевых зазоров противопесочных фильтров, включающей средство для размещения фильтра, оптический сканер поверхности фильтра, включающий источник излучения и последовательно расположенные объектив и фотоприемник, а также средства установки и перемещения оптического сканера вдоль фильтра и соединенный с ними блок управления, включающий программно-аппаратные средства, снабженные, по меньше мере, предустановленным программно-аппаратным образом в блоке памяти алгоритмом выполнения операций финишного контроля и измерения щелевых зазоров. При этом источник излучения выполнен в виде промышленной подсветки и/или лазерно-оптического блока, а объектив и фотоприемник формируют оптический канал захвата изображения сканируемого участка фильтра в области подсветки источником излучения и его преобразования в цифровой формат. Оптический сканер дополнительно снабжен датчиком контроля фокуса по измеряемым данным текущего расстояния оптического сканера до сканируемой поверхности фильтра, соединенным с блоком управления, снабженным программно-аппаратными средствами подстройки положения оптического сканера по высоте от сканируемой поверхности при отклонении от заданного значения фокусного расстояния текущих показаний датчика контроля, а блок управления снабжен предустановленным в блоке памяти реализованным программно-аппаратным образом средством определения границ измеряемого щелевого зазора между витками фильтра по предустановленному программно-аппаратным образом алгоритму обработки светотеневого спектра получаемого от фотоприемника цифрового изображения сканируемого участка фильтра посредством его пороговой обработки с удалением пространственно-временного шума. 3 н. и 34 з.п. ф-лы, 9 ил.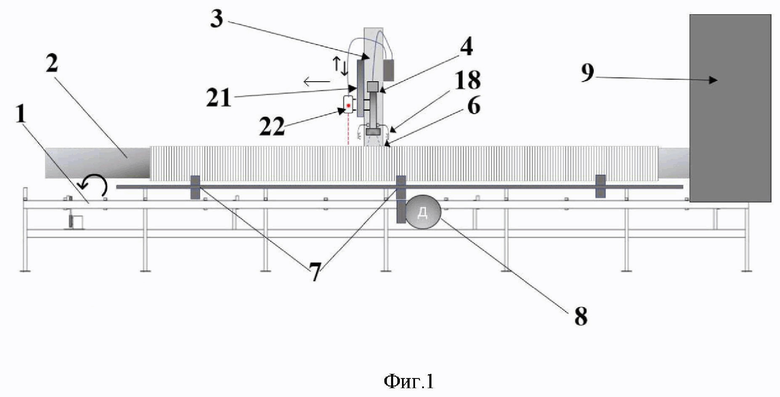
1. Способ финишного контроля и измерения щелевых зазоров противопесочных фильтров, характеризующийся выполнением последовательно выполняемых действий, включающих:
- установку оптического сканера над фильтром на заданном программно-аппаратным образом по высоте от поверхности сканирования фильтра фокусном расстоянии;
- сканирование поверхности фильтра посредством оптического сканера, непрерывно перемещаемого вдоль фильтра в горизонтальном направлении при пульсирующей подсветке сканируемой поверхности фильтра с заданной блоком управления программно-аппаратным образом скоростью;
- поддержание в процессе сканирования положения оптического сканера в пределах предустановленного фокусного расстояния посредством измерения высоты размещения оптического сканера над фильтром датчиком контроля и подстройки блоком управления положения оптического сканера по высоте программно-аппаратным образом при отклонении текущего положения от заданных параметров фокусного расстояния;
- захват фотоприемником оптического сканера в цифровом формате изображения сканируемой поверхности фильтра, включающего один щелевой зазор с краями из металлической проволоки соседних витков фильтра, повторение операции при перемещении оптического сканера по сканируемой поверхности с заданными программно-аппаратным образом параметрами;
- определение границ щелевого зазора посредством обработки программно-аппаратным образом светотеневого спектра каждого получаемого изображения на основе выделения контуров между светлой и теневой частью изображения посредством пороговой обработки с удалением пространственно-временного шума и одновременным увеличением детализации изображения; а также
- вычисление для каждого изображения программно-аппаратным образом величины щелевого зазора по выделенным границам посредством определения площади щелевого зазора между границами и вычисления среднего значения щелевого зазора по ширине щели в пикселях с преобразованием в метрические единицы с учетом коэффициента масштабирования, являющегося показателем разрешающей способности оптической системы оптического сканера.
2. Способ по п. 1, отличающийся тем, что осуществляют повторение операций для определения ширины щелевого зазора в первом множестве местоположений по длине экрана под заданным углом расположения сканера по отношению к поверхности фильтра.
3. Способ по п. 2, отличающийся тем, что осуществляют повторение операций для определения ширины щелевого зазора во втором множестве местоположений по длине фильтра под заданным углом расположения сканера по отношению к поверхности фильтра при повороте фильтра на заданный угол по отношению к измерениям в первом множестве местоположений.
4. Способ по п. 1, отличающийся тем, что пороговую обработку осуществляют, по меньшей мере, посредством бинаризации пикселей исходного изображения по фиксированному порогу, а удаление пространственно-временного шума последовательным применением операторов эрозии и дилатации.
5. Способ по п. 4, отличающийся тем, что бинаризацию пикселей осуществляют по интенсивности и фиксированному порогу следующим образом:

где threshold – параметр контрастности, устанавливаемый исходя из свойств матрицы цифровой фотокамеры, интенсивности подсветки и отражающих свойств границ щелевых зазоров.
6. Способ по п. 1, отличающийся тем, что на этапе установки оптического сканера на фокусном расстоянии от сканируемой поверхности вычисления текущего расстояния оптического сканера по высоте до поверхности фильтра осуществляют посредством лазерного датчика контроля фокуса с использованием алгоритма осреднения данных по расстояниям, регистрируемым лазерным датчиком контроля фокуса в ходе сканирования поверхности фильтра.
7. Способ по п. 1, отличающийся тем, что корректировку текущего положения оптического сканера в пределах заданного фокусного расстояния осуществляют посредством перемещения сканера в вертикальном направлении до установления заданного расстояния до фильтра.
8. Способ по п. 1, отличающийся тем, что перемещение оптического сканера вдоль тестируемого фильтра осуществляют посредством подвижной каретки.
9. Способ по любому из пп. 1-8, отличающийся тем, что дополнительно осуществляют статистическую обработку данных измерений и анализ распределения щелевых зазоров фильтра с подсчетом средних значений зазоров и среднеквадратичных отклонений, осуществляемый программно-аппаратным образом по предустановленному алгоритму, и формируют построение итогового отчета по тестированию щелевых зазоров фильтра с применением предустановленных критериев годности их распределения для фильтра.
10. Способ по любому из пп. 1-8, отличающийся тем, что измерение щелевых зазоров осуществляют по внешней поверхности фильтра при перемещении оптического сканера вдоль фильтра и вращении фильтра вдоль продольной оси, причем вращение фильтра осуществляют посредством подсистемы вращения, снабженной двигателем, момент вращения которого передают через систему соприкасающихся роликов подсистемы вращения на фильтр.
11. Способ по п. 1, отличающийся тем, что перемещение оптического сканера осуществляют посредством подсистемы горизонтального перемещения инспекционной машины.
12. Способ по п. 11, отличающийся тем, что сканер устанавливают на колонну, а ее перемещение вдоль фильтра осуществляют на каретке по направляющим рельсам и зубчатой рейки, закрепленным на горизонтальной пластине инспекционного стола за счет вращения шестеренки мотора подсистемы горизонтального перемещения инспекционной машины.
13. Способ по п. 1, отличающийся тем, что осуществляют управление измерением щелевых зазоров фильтра посредством блока управления инспекционной машины, снабженной сенсорным экраном и процессором управляющего блока инспекционной машины, посредством программно-аппаратным образом реализуемого алгоритма с графическим интерфейсом, отображаемым на сенсорном экране.
14. Способ по п. 1, отличающийся тем, что пульсирующую подсветку сканируемой поверхности осуществляют посредством снабжения оптического сканера промышленной подсветкой, с обеспечением возможности цифрового захвата изображения щелевого зазора без искажения цветоделения.
15. Инспекционная машина финишного контроля и измерения щелевых зазоров противопесочных фильтров, включающая, по меньшей мере, средство для размещения фильтра, оптический сканер поверхности фильтра, включающий источник излучения и последовательно расположенные объектив и фотоприемник, а также средства установки и перемещения оптического сканера вдоль фильтра и соединенный с ними блок управления, включающий программно-аппаратные средства, снабженные, по меньше мере, предустановленным программно-аппаратным образом в блоке памяти алгоритмом выполнения операций финишного контроля и измерения щелевых зазоров, отличающаяся тем, что источник излучения выполнен в виде промышленной подсветки, а объектив и фотоприемник формируют оптический канал захвата изображения сканируемого участка фильтра в области подсветки источником излучения и его преобразования в цифровой формат, при этом оптический сканер дополнительно снабжен датчиком контроля фокуса по измеряемым данным текущего расстояния оптического сканера до сканируемой поверхности фильтра, соединенным с блоком управления, снабженным программно-аппаратными средствами подстройки положения оптического сканера по высоте от сканируемой поверхности при отклонении от заданного значения фокусного расстояния текущих показаний датчика контроля, а блок управления снабжен предустановленным в блоке памяти реализованным программно-аппаратным образом средством определения границ измеряемого щелевого зазора между витками фильтра по предустановленному программно-аппаратным образом алгоритму обработки светотеневого спектра получаемого от фотоприемника цифрового изображения сканируемого участка фильтра посредством его пороговой обработки с удалением пространственно-временного шума.
16. Инспекционная машина по п. 15, отличающаяся тем, что оптический сканер размещен на подвижной в вертикальном направлении платформе, установленной на вертикально ориентированной подвижной в горизонтальном направлении, вдоль фильтра, колонне средства установки и перемещения оптического сканера, причем датчик контроля размещен на платформе посредством неподвижного кронштейна.
17. Инспекционная машина по п. 16, отличающаяся тем, что оптический сканер снабжен телецентрическим объективом, с возможностью формирования пучка параллельных лучей, а датчик контроля выполнен в виде лазерного триангуляционного датчика и/или лазерного дальномера.
18. Инспекционная машина по п. 17, отличающаяся тем, что фотоприемник выполнен в виде цифровой матричной камеры и снабжен бителецентрическим объективом.
19. Инспекционная машина по п. 15, отличающаяся тем, что промышленная подсветка закреплена на телецентрическом объективе и выполнена пульсирующей с предустановленной программно-аппаратным образом в микроконтроллере блока управления скоростью, а фотоприемник выполнен с короткой выдержкой затвора, сопоставимой со скоростью пульсации, с обеспечением возможности фиксации и записи сканируемого изображения при непрерывном движении колонны вдоль фильтра (при 60 кадрах в секунду).
20. Инспекционная машина по п. 15, отличающаяся тем, что источник излучения дополнительно снабжен лазерным микрометром.
21. Инспекционная машина по любому из пп. 15-20, отличающаяся тем, что средство для размещения фильтра выполнено в виде горизонтально ориентированной поверхности, снабженной вращающимися вокруг горизонтальной оси соприкасающимся роликами, удерживающими фильтр на поверхности стола, по меньшей мере один из которых сопряжен с подсистемой вращения тестируемого фильтра, снабженной двигателем вращения, сопряженным с блоком управления, при этом вдоль одной из боковых сторон стола размещена подсистема горизонтального перемещения вдоль фильтра колонны с оптическим устройством сканирования, сопряженная с блоком управления.
22. Инспекционная машина по п. 20, отличающаяся тем, что подсистема горизонтального перемещения колонны с оптическим устройством сканирования снабжена двумя направляющими рельсами с зубчатой рейкой, сопряженными с мотором горизонтального перемещения, и кареткой, установленной на колонне.
23. Инспекционная машина по п. 21, отличающаяся тем, что подсистема горизонтального перемещения дополнительно снабжена концевыми датчиками ограничения перемещения колонны, сопряженными с устройством управления.
24. Инспекционная машина по п. 20, отличающаяся тем, что средство для размещения фильтра дополнительно снабжено средством парковки колонны с оптическим устройством сканирования, располагаемым с одной из торцевых сторон и снабженным защитным щитком.
25. Инспекционная машина по п. 15, отличающаяся тем, что блок управления инспекционной машины сопряжен с монитором и снабжен контроллерами горизонтального и вертикального перемещения оптического устройства сканирования, сопряженными с соответствующими подсистемами управления горизонтальным и/или вертикальным перемещением оптического устройства сканирования; контроллером вращения фильтра, сопряженного с соответствующей подсистемой вращения тестируемого фильтра, средствами управления инспекционной машиной, а также блоками памяти и обработки информации, причем блоки памяти и обработки информации контроллеры блока управления снабжены программно-аппаратным образом предустановленным алгоритмом управления режимами работы оптического устройства сканирования, его фокусировки и обработки светотеневого спектра получаемого изображения посредством пороговой обработки с удалением пространственно-временного шума.
26. Инспекционная машина по п. 24, отличающаяся тем, что предустановленный программно-аппаратным образом алгоритм обработки светотеневого спектра получаемого изображения посредством пороговой обработки с удалением пространственно-временного шума блока обработки информации блока управления выполнен с обеспечением возможности:
- сканирования поверхности фильтра, выполненного с возможностью вращения вокруг продольной оси, с использованием оптического сканера, выполненного с возможностью перемещения в горизонтальном и/или вертикальном направлении;
- фокусировки оптического сканера посредством датчика контроля фокуса по текущим измерениям расстояния оптической системы сканера сканируемой поверхности щелевого фильтра и вертикальной подстройки положения сканера при отклонении текущих показаний датчика контроля фокуса от предустановленных в блоке управления значений фокусного расстояния;
- захвата в цифровом формате изображения поверхности фильтра, включающего один щелевой зазор с краями из металлической проволоки соседних витков фильтра;
- определения границ зазора по предустановленному программно-аппаратным образом алгоритму обработки светотеневого спектра получаемого изображения на основе выделения контуров между светлой и теневой частью изображения посредством пороговой обработки с удалением пространственно-временного шума и одновременным увеличением детализации изображения; а также
- вычисления по предустановленному программно-аппаратным образом алгоритму величины щелевого зазора по выделенным границам на основе определения площади щелевого зазора между границами и вычисления среднего значения щелевого зазора по ширине щели в пикселях с преобразованием в метрические единицы с учетом коэффициента масштабирования, являющегося показателем разрешающей способности оптической системы сканера.
27. Инспекционная машина финишного контроля и измерения щелевых зазоров противопесочных фильтров, включающая, по меньшей мере, средство для размещения фильтра, оптический сканер поверхности фильтра, включающий, по меньшей мере, канал измерения, содержащий последовательно расположенные объектив и фотоприемник, а также средства установки и перемещения оптического сканера вдоль фильтра и соединенный с ними блок управления, включающий программно-аппаратные средства, снабженные, по меньшей мере, предустановленным в блоке памяти алгоритмом выполнения операций финишного контроля и измерения щелевых зазоров, отличающаяся тем, что оптический сканер выполнен в виде лазерно-оптического блока, включающего оптический источник зондирующего лазерного излучения, канал измерения полученного отраженного изображения сканируемой поверхности, а также дополнительного датчика контроля фокуса по измеряемым данным текущего расстояния оптического сканера до сканируемой поверхности фильтра, соединенного с блоком обработки информации блока управления, снабженным программно-аппаратными средствами фокусировки оптического сканера по отклонению от заданного значения показаний датчика контроля фокуса, а также определения границ измеряемого зазора по предустановленному программно-аппаратным образом алгоритму обработки светотеневого спектра получаемого изображения посредством пороговой обработки с удалением пространственно-временного шума.
28. Инспекционная машина по п. 27, отличающаяся тем, что источник зондирующего лазерного излучения выполнен в виде оптического микрометра, а оптическое устройство сканирования размещено на подвижной в вертикальном направлении платформе, установленной на вертикально ориентированной подвижной в горизонтальном направлении, вдоль фильтра, колонне средства установки и перемещения устройства сканирования, причем датчик контроля фокуса текущего расстояния размещен на платформе посредством неподвижного кронштейна.
29. Инспекционная машина по п. 28, отличающаяся тем, что микрометр снабжен телецентрическим объективом с возможностью формирования пучка параллельных лучей, а датчик контроля фокуса выполнен в виде лазерного триангуляционного датчика и/или лазерного дальномера.
30. Инспекционная машина по п. 29, отличающаяся тем, что фотоприемник выполнен в виде цифровой матричной камеры и снабжен бителецентрическим объективом.
31. Инспекционная машина по п. 27, отличающаяся тем, что устройство сканирования дополнительно снабжено промышленной пульсирующей подсветкой с предустановленной программно-аппаратным образом в микроконтроллере блока управления скоростью пульсации, закрепленной на телецентрическом объективе, а фотоприемник выполнен с короткой выдержкой затвора, сопоставимой со скоростью пульсации, с обеспечением возможности фиксации и записи сканируемого изображения при непрерывном движении колонны вдоль фильтра (при 60 кадрах в секунду).
32. Инспекционная машина по любому из пп. 27-31, отличающаяся тем, что средство для размещения фильтра выполнено в виде горизонтально ориентированного стола (поверхности), снабженного вращающимися вокруг горизонтальной оси соприкасающимся роликами, удерживающими фильтр на поверхности стола, по меньшей мере один из которых сопряжен с подсистемой вращения тестируемого фильтра, снабженной двигателем вращения, сопряженным с блоком управления, при этом вдоль одной из боковых сторон стола размещена подсистема горизонтального перемещения вдоль фильтра колонны с оптическим устройством сканирования, сопряженная с блоком управления.
33. Инспекционная машина по п. 32, отличающаяся тем, что подсистема горизонтального перемещения колонны с оптическим устройством сканирования снабжена двумя направляющими рельсами с зубчатой рейкой, сопряженными с мотором горизонтального перемещения, и кареткой, установленной на колонне.
34. Инспекционная машина по п. 33, отличающаяся тем, что подсистема горизонтального перемещения дополнительно снабжена концевыми датчиками ограничения перемещения колонны, сопряженными с устройством управления.
35. Инспекционная машина по п. 32, отличающаяся тем, что средство для размещения фильтра дополнительно снабжено средством парковки колонны с оптическим устройством сканирования, располагаемым с одной из торцевых сторон и снабженным защитным щитком.
36. Инспекционная машина по п. 32, отличающаяся тем, что блок управления инспекционной машины сопряжен с монитором и снабжен контроллерами горизонтального и вертикального перемещения оптического устройства сканирования, сопряженными с соответствующими подсистемами управления горизонтальным и/или вертикальным перемещением оптического устройства сканирования; контроллером вращения фильтра, сопряженного с соответствующей подсистемой вращения тестируемого фильтра, средствами управления инспекционной машиной, а также блоками памяти и обработки информации, причем блоки памяти и обработки информации контроллеры блока управления снабжены программно-аппаратным образом предустановленным алгоритмом управления режимами работы оптического устройства сканирования, его фокусировки и обработки светотеневого спектра получаемого изображения посредством пороговой обработки с удалением пространственно-временного шума.
37. Инспекционная машина по п. 36, отличающаяся тем, что предустановленный программно-аппаратным образом алгоритм обработки светотеневого спектра получаемого изображения посредством пороговой обработки с удалением пространственно-временного шума блока обработки информации блока управления выполнен с возможностью:
- сканирования поверхности фильтра, выполненного с возможностью вращения вокруг продольной оси, с использованием оптического сканера, при этом сканер выполнен с возможностью перемещения в горизонтальном и/или вертикальном направлении, а фильтр вращения вокруг продольной оси;
- фокусировки оптического сканера посредством датчика контроля фокуса по текущим измерениям расстояния оптической системы сканера до поверхности сканируемой поверхности щелевого фильтра и вертикальной подстройки положения сканера при отклонении текущих показаний датчика контроля фокуса от предустановленных в блоке управления значений допустимого фокусного расстояния;
- захвата в цифровом формате изображения поверхности фильтра, включающего один щелевой зазор с краями из металлической проволоки соседних витков фильтра;
- определения границ зазора по предустановленному программно-аппаратным образом алгоритму обработки светотеневого спектра получаемого изображения на основе выделения контуров между светлой и теневой частью изображения посредством пороговой обработки с удалением пространственно-временного шума и одновременным увеличением детализации изображения; а также
- вычисления по предустановленному программно-аппаратным образом алгоритму величины щелевого зазора по выделенным границам на основе определения площади щелевого зазора между границами и вычисления среднего значения щелевого зазора по ширине щели в пикселях с преобразованием в метрические единицы с учетом коэффициента масштабирования, являющегося показателем разрешающей способности оптической системы сканера.
| US 7102745 B2, 05.09.2006 | |||
| US 7755770 B2, 13.07.2010 | |||
| US 4914514 A1, 03.04.1990 | |||
| СПОСОБ КОНТРОЛЯ СОСТОЯНИЯ ДЛИННОМЕРНОГО ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2017 |
|
RU2670570C1 |

