Изобретение относится к железнодорожной автоматике и телемеханике для управления движением поездов на станциях и на промышленных предприятиях.
Наиболее близким аналогом (прототипом) является патент РФ №92645 от 21.01.2010 под названием «Распределенный контролируемый пункт» на полезную модель (МПК B61L 27/04). Известное решение содержит блоки ввода и вывода сигналов и центральный блок управления, соединенный с локальной сетью, рабочее место дежурного по станции и рабочее место электромеханика, каждое из которых оснащено, двумя равнозначными по отображению компьютерами с сетевыми портами Ethernet, объединенными в дублированную локальную сеть с помощью коммутаторов, при этом центральный блок управления включает, по меньшей мере, два промышленных компьютера с сетевыми портами Ethernet и CAN, модуль связи, обеспечивающий возможность подключения через устройства защиты к другим распределенным контролируемым пунктам, и коммутаторы локальной сети Ethernet, связанные между собой дублированной локальной сетью, и обеспечивает взаимодействие по двум локальным сетям типа CAN с двумя комплектами блоков ввода и вывода сигналов, включающими блоки вывода сигналов телеуправления, блоки ввода сигналов телесигнализации и блоки вывода сигналов ответственного телеуправления, а также взаимодействие посредством третьей локальной сети типа CAN с блоками ввода сигналов телеизмерения, осуществляющими диагностику и контроль технического состояния стационарных устройств автоматики и телемеханики. Данное решение обладает следующими недостатками: отсутствует функция интеллектуальной поддержки принятия решений на базе нейросетевых алгоритмов (анализ поездной ситуации, диагностические параметры по состоянию ТС и измеренным временным параметрам, напряжениям и сопротивлениям в устройствах сигнализации, централизации и блокировки (СЦБ)); недостаточное количество измеряемых величин и параметров в устройствах СЦБ; отсутствует логический контроль функционирования устройств СЦБ и действий ДСП с формированием предупреждающих сообщений; отсутствие протоколирования технологических событий и действий дежурного по станции; отсутствие возможности просмотра протоколов архивных событий с возможностью их классификации по различным критериям (тип объекта, тип события, время возникновения, по типу неисправностей, предотказных состояний и т.д.).
Задачей изобретения является создание более совершенной релейно-процессорной электрической централизации при устранении недостатков известных аналогов. Технический результат заключается в обеспечении возможности интеллектуальной поддержки принятия решений на базе нейросетевых алгоритмов. Также технический результат заключается в обеспечении возможности логического контроля функционирования устройств СЦБ и действий ДСП с формированием предупреждающих сообщений. Также технический результат заключается в обеспечении возможности протоколирования технологических событий и действий дежурного по станции и просмотра протоколов архивных событий с возможностью их классификации по различным критериям (тип объекта, тип события, время возникновения, по типу неисправностей, предотказных состояний и т.д.). Технический результат достигается за счет всей совокупности существенных признаков.
Сущность изобретения состоит в том, что релейно-процессорная электрическая централизация состоит из по меньшей мере одного автоматизированного рабочего места дежурного по станции, по меньшей мере одного автоматизированного рабочего места электромеханика, по меньшей мере одной локальной вычислительной сети, подсистемы управления станцией, причем автоматизированное рабочее место дежурного по станции и автоматизированного рабочего места электромеханика соединены посредством локальной вычислительной сети с подсистемой управления станцией, включающей сервер управления централизацией, соединенный с концентратором информации управления и с концентратором информации диагностики, причем концентратором информации управления соединен через локальную сеть CAN с блоками телесигнализации (ТС), блоками телеуправления (ТУ), блоками ответственного телеуправления (ОТУ), а концентратор информации диагностики соединен через локальную сеть CAN с блоками телеизмерения напряжения (ТИ) и блоками телеизмерения сопротивления изоляции (ИСИ), также блоки телесигнализации, телеуправления, ответственного телеуправления, телеизмерения напряжения, телеизмерения сопротивления изоляции подключены к релейной исполнительной группе централизации. Кроме того, автоматизированное рабочее место дежурного по станции выполнено с возможностью интеллектуальной поддержки принятия решений на базе нейросетевых алгоритмов, а также управления устройствами СЦБ в режимах маршрутного или раздельного управления, или ввода ответственных команд, отображения визуальной и голосовой информации. А автоматизированное рабочее дежурного по станции выполнено с возможностью логического контроля действий ДСП с формированием предупреждающих сообщений, на основе графического и голосового оповещения дежурного по станции. Причем автоматизированное рабочее место электромеханика выполнено с возможностью логического и параметрического контроля функционирования устройств сигнализации, централизации и блокировки с формированием предупреждающих сообщений, на основе графического и голосового оповещения электромеханика, а также с возможностью просмотра протоколов архивных событий, их классификации по различным критериям и поиска событий в архивной базе протоколов. Также локальная вычислительная сеть представляет собой оптическую вычислительную сеть с Ethernet окончанием. Вместе с тем подсистема управления станцией выполнена с возможностью осуществления функций формирования команд для концентратора информации управления, получения информации от концентратора информации диагностики, протоколирования технологических событий и действий дежурного по станции. Кроме того, блок телесигнализации выполнен с возможностью осуществления контроля состояния объектов релейной исполнительной группы централизации и передачи, полученной информации в концентратор информации. А блок телеуправления выполнен с возможностью реализации команд неответственного управления, поступающих от концентратора информации. Причем блок ответственного телеуправления выполнен с возможностью реализации команд ответственного управления, поступающих от концентратора информации. Кроме того, блок телеизмерения выполнен с возможностью осуществления контроля параметров объектов исполнительной группы централизации и передачи полученной информации в концентратор информации. Вместе с тем, блок телеизмерения сопротивления изоляции выполнен с возможностью осуществления контроля сопротивления изоляции объектов исполнительной группы централизации и передачи полученной информации в концентратор информации.
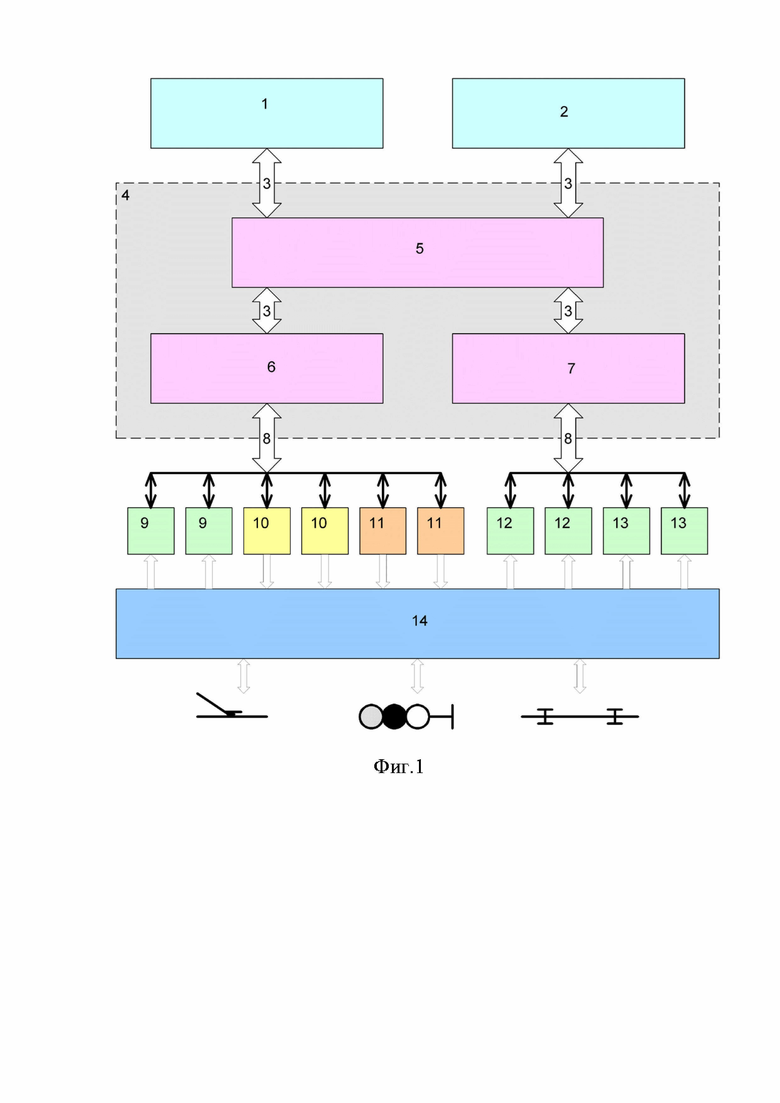
Изобретение поясняется графически, где на фиг. 1 представлена схема предлагаемой релейно-процессорной электрической централизации.
Релейно-процессорная электрическая централизация (показана на фиг. 1) состоит из по меньшей мере одного автоматизированного рабочего места дежурного по станции 1, по меньшей мере одного автоматизированного рабочего места электромеханика 2, по меньшей мере одной локальной вычислительной сети 3, подсистемы управления станцией 4, по меньшей мере одной локальной сети CAN 8, множества блоков ТС 9, ТУ 10, ОТУ 11, ТИ 12, ИСИ 13, исполнительной группы централизации 14 и одного объекта управления электрической централизации. Автоматизированное рабочее место дежурного по станции 1 представляет собой персональный промышленный компьютер (ППК). Автоматизированное рабочее место дежурного по станции 1 предназначено для выполнения функций управления устройствами СЦБ в режимах маршрутного или раздельного управления, или ввода ответственных команд, отображения визуальной и голосовой информации. Автоматизированное рабочее место дежурного по станции 1 выполнено с возможностью интеллектуальной поддержки принятия решений на базе нейросетевых алгоритмов: анализ поездной ситуации, диагностические параметры по состоянию сигналов ТС и измеренным временным параметрам, напряжениям и сопротивлениям в устройствах СЦБ. Данная возможность достигается благодаря применению в качестве блока телеизмерения 12 блока с расширенными возможностями измерения напряжений - модулированный сигнал частотами тональных рельсовых цепей (420, 480, 580, 720 и 780 Гц) и режим осциллографа с частотой дискретизации от 0,1 до 1 мс (для определения формы тока перевода стрелок). Также расширена номенклатура блоков телеизмерения, в состав релейно-процессорной электрической централизации добавлен блок измерения сопротивления изоляции 13 (РКП-ИСИ). Изменена платформа блоков РКП (применен микроконтроллер более высокого класса производительности - 32-х разрядный RISC архитектуры ARM Cortex-M3), что позволило производить более точные измерения токов и напряжений и более точные измерения временных параметров (блоками ТС), тем самым повышен уровень диагностики. Индивидуальный контроль состояния объектов централизации - стрелок, светофоров, рельсовых цепей, переездов, датчиков УКСПС, автоматики на прилегающих перегонах, т.е. контроль поездного положения. Для отображения визуальной информации используется жидкокристаллические мониторы, голосовая информация воспроизводится через звуковые колонки. В качестве органов управления используется стандартная клавиатура компьютера и манипулятор типа «мышь». Автоматизированное рабочее место дежурного по станции 1 соединено с подсистемой управления станцией 4 посредством локальной вычислительной сети 3. Автоматизированное рабочее место электромеханика 2 представляет собой персональный промышленный компьютер. Автоматизированное рабочее место электромеханика 2 предназначено для диагностирования устройств СЦБ на основе логического и параметрического контроля (релейных и микропроцессорных средств); звуковое, голосовое и графическое оповещение электромеханика; просмотр протоколов архивных событий с возможностью их классификации по различным критериям (тип объекта, тип события, время возникновения и т.д.); возможность поиска событий (неисправностей, предотказных состояний) в архивной базе протоколов. Автоматизированное рабочее место электромеханика 2 соединено с подсистемой управления станцией 4 посредством локальной вычислительной сети 3. Локальная вычислительная сеть 3 представляет собой оптическую вычислительную сеть с Ethernet окончанием. Локальная вычислительная сеть 3 предназначена для связи автоматизированного рабочего места дежурного по станции 1 и автоматизированного рабочего места электромеханика 2 с подсистемой управления станцией 5. Локальная вычислительная сеть 3 соединяет автоматизированное рабочее место дежурного по станции 1 и автоматизированное рабочее место электромеханика 2 с подсистемой управления станцией 4. Подсистема управления станцией 4 состоит из шкафа (ШУ), который представляет собой 19-ти дюймовый шкаф стандарта «Евромеханика». В состав шкафа управления входят: сервер управления 5; концентратор информации управления 6; концентратор информации диагностики (мониторинга) 7; локальная сеть CAN 8. Подсистема управления станцией 4 предназначена для выполнения функций формирования команд для концентратора информации управления 6, получения информации от концентратор информации диагностики (мониторинга) 7, протоколирование технологических событий и действий дежурного по станции. Концентратор информации управления 6 представляет собой промышленный компьютер. Концентратор информации управления 6 обеспечивает взаимодействие с множеством блоков 9 (ТС), 10 (ТУ), 11 (ОТУ). Концентратор информации 6 соединен с блоками 9, 10, 11 посредством локальной сети CAN 8, с сервером управления 5 соединен посредством вычислительной сети Ethernet. Блок телесигнализации (ТС) 9 представляет собой блок ввода двухпозиционных сигналов напряжения постоянного и переменного тока. Блок телесигнализации (ТС) 9 предназначен для осуществления контроля состояния объектов релейной исполнительной группы централизации 14 и передачи полученную информацию назад в концентратор информации 6. Блок телесигнализации (ТС) 9 соединен локальной сетью CAN 8 с концентратором информации 6 и входами контроля подключен к исполнительной группе централизации 14. Блок телеуправления (ТУ) 10 представляет собой блок вывода дискретных сигналов управления с релейным выходом. Блок телеуправления (ТУ) 10 предназначен для реализации команд неответственного управления, поступающих от концентратора информации 6. Блок телеуправления (ТУ) 10 соединен CAN сетью 8 с концентратором информации 6 и релейными выходами подключен к исполнительной группе централизации 14. Блок ответственного телеуправления (ОТУ) 11 представляет собой блок вывода дискретных сигналов управления с безопасным выходом. Блок ответственного телеуправления (ОТУ) 11 предназначен для реализации команд ответственного управления, поступающих от концентратора информации 6. Блок ответственного телеуправления (ОТУ) 11 соединен локальной сетью CAN 8 с концентратором информации 6 и безопасными выходами подключен к исполнительной группе централизации 14. Блоки 9 (ТС), 10 (ТУ), 11 (ОТУ) вместе составляют блоки контроля-управления. Блоки контроля-управления ТС 9, ТУ 10, ОТУ 11 обеспечивают увязку с исполнительной группой централизации 14. Блоки 9 (ТУ), 10 (ОТУ) получают команды управления объектами исполнительной группы централизации 14 от концентратора информации 6. Концентратор информации диагностики (мониторинга) 7 представляет собой промышленный компьютер. Концентратор информации диагностики (мониторинга) 7 обеспечивает взаимодействие с множеством блоков 12 (ТИ), 13 (ИСИ). Концентратор информации 7 соединен с блоками 12, 13, посредством локальной сети CAN 8, с сервером управления 5 соединен посредством вычислительной сети Ethernet. Блок телеизмерения (ТИ) 12 представляет собой блок ввода аналоговых сигналов напряжения постоянного и переменного тока. Блок телеизмерения (ТИ) 12 предназначен для осуществления контроля параметров объектов исполнительной группы централизации 14 и передачи полученную информацию назад в концентратор информации 7. Блок телеизмерения (ТИ) 12 соединен локальной сетью CAN 8 с концентратором информации 7 и входами контроля подключен к исполнительной группе централизации 14. Блок телеизмерения сопротивления изоляции (ИСИ) 13 представляет собой блок телеизмерения сопротивления изоляции электрических цепей постоянного и переменного тока. Блок телеизмерения сопротивления изоляции (ИСИ) 13 предназначен для осуществления контроля сопротивления изоляции объектов исполнительной группы централизации 14 и передачи полученную информацию назад в концентратор информации 7. Блок телеизмерения сопротивления изоляции (ИСИ) 13 соединен локальной сетью CAN 8 с концентратором информации 7 и входами контроля подключен к исполнительной группе централизации 14. Блоки 12 (ТИ), 13 (ИСИ) вместе составляют блоки диагностики (мониторинга). Блоки диагностики (мониторинга) ТИ 12, ИСИ 13 обеспечивают параметрический контроль исполнительной группы централизации 14 и объектов управления релейно-процессорной электрической централизации. Блоки 12 (ТИ), 13 (ИСИ) передают измеренные параметры объектов управления релейно-процессорной электрической централизации и исполнительной группы централизации 14 в концентратор информации 7.Исполнительная группа централизации 14 подключается к объектам управления релейно-процессорной электрической централизации, представляющие собой совокупность объектов: стрелки, светофоры, электрические рельсовые цепи, переезды, устройства УКСПС, средства оповещения, работающих на путях, и т.д. Исполнительная группа централизации 14 релейно-процессорной электрической централизации предназначена для обеспечения управления, контроля и мониторинга процесса движения поездов с требуемым уровнем безопасности.
Релейно-процессорная электрическая централизация функционирует следующим образом. Дежурный по станции задает команду на автоматизированном рабочем месте дежурного по станции 1. Автоматизированное рабочее место дежурного по станции 1 воспринимает команду, после чего передает ее по локальной вычислительной сети 3 в сервер управления 5, и далее в концентратор информации 6. Посредством концентратора информации 6 команду из локальной вычислительной сети 3 передают в локальную сеть CAN 8, а затем в блоки телеуправления 10 или блоки ответственного телеуправления 11 в случае реализации ответственной команды. Блоки 10 и 11 непосредственно подключены к управляющим цепям релейной исполнительной группы централизации 14, которая обеспечивают проверку зависимостей (безопасность) управление станцией. Все изменения, происходящие на станции, фиксируют блоками телесигнализации ТС 9. Информация предается в обратном порядке. От контролируемых объектов управления в исполнительную группу электрической централизации 14, и посредством блоков ТС 9 информация передается в локальную сеть CAN 8, далее в концентратор информации 6, в локальную вычислительную сеть 3, в сервер управления 5, и в автоматизированное рабочее место дежурного по станции 1 и в автоматизированное рабочее место электромеханика 2. Автоматизированное рабочее место дежурного по станции 1 АРМ ДСП выполняет функции: контроль поездного положения; функцию интеллектуальной поддержки принятия решений; логический контроль действий ДСП; звуковое и голосовое и графическое оповещение ДСП; индивидуальный контроль состояния объектов централизации - стрелок, светофоров, рельсовых цепей, переездов, датчиков УКСПС, автоматики на прилегающих перегонах; управление устройствами СЦБ в режимах маршрутного или раздельного управления, или ввода ответственных команд. Автоматизированное рабочее место электромеханика 2 АРМ ШН выполняет функции: диагностирование устройств СЦБ на основе логического и параметрического контроля (релейных и микропроцессорных средств); звуковое, голосовое и графическое оповещение электромеханика; просмотр протоколов архивных событий с возможностью их классификации по различным критериям (тип объекта, тип события, время возникновения и т.д.); возможность поиска событий (неисправностей, предотказных состояний) в архивной базе протоколов. АРМ ДСП и АРМ ШН посредством локальной вычислительной сети 3 взаимодействуют с подсистемой управления станцией 4, непосредственно с сервером управления 5. Посредством локальной вычислительной сети 3 обеспечивается выполнение функций обмена информацией между сервером управления 5 и концентраторами информации управления 6 и диагностики (мониторинга) 7.
Применение заявленного изобретения имеет следующие достоинства: добавлена функция интеллектуальной поддержки принятия решений на базе нейросетевых алгоритмов: анализ поездной ситуации, диагностические параметры по состоянию ТС и измеренным временным параметрам, напряжениям и сопротивлениям в устройствах сигнализации, централизации и блокировки (СЦБ); применение в качестве блока телеизмерения РКП-ТИ1М с расширенными возможностями измерений напряжении; расширена номенклатура блоками телеизмерения сопротивления изоляции РКП-ИСИ, тем самым расширенны возможности диагностики; изменена платформа блоков РКП (применен микроконтроллер более высокого класса по производительности), что позволило производить более точные измерения токов и напряжений и более точные измерения временных параметров (блоками ТС), тем самым повышен уровень диагностики; добавлена функция логического контроля функционирования устройств сигнализации, централизации и блокировки (СЦБ) и действий ДСП с формированием предупреждающих сообщений; добавлена возможность протоколирования технологических событий и действий дежурного по станции, возможность просмотра протоколов архивных событий с возможностью их классификации по различным критериям (тип объекта, тип события, время возникновения, по типу неисправностей, предотказных состояний и т.д.).
| название | год | авторы | номер документа |
|---|---|---|---|
| Система диспетчерской централизации | 2024 |
|
RU2833087C1 |
| Блочная микропроцессорная централизация (БМПЦ) | 2023 |
|
RU2803696C1 |
| Гибридное устройство маршрутизации | 2019 |
|
RU2710503C1 |
| Модуль безопасного сопряжения | 2019 |
|
RU2710978C1 |
| ЦЕНТРАЛИЗОВАННАЯ ДИСПЕТЧЕРСКАЯ СИСТЕМА С РАСПРЕДЕЛЕННЫМИ КОНТРОЛИРУЕМЫМИ ПУНКТАМИ | 2003 |
|
RU2240245C1 |
| Система диспетчерской централизации железной дороги | 2019 |
|
RU2728199C1 |
| Унифицированный логический контроллер | 2019 |
|
RU2710502C1 |
| МНОГОУРОВНЕВАЯ СИСТЕМА УПРАВЛЕНИЯ И ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ДВИЖЕНИЯ ПОЕЗДОВ ДЛЯ СОРТИРОВОЧНЫХ СТАНЦИЙ | 2009 |
|
RU2401217C1 |
| МНОГОУРОВНЕВАЯ СИСТЕМА УПРАВЛЕНИЯ И ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ДВИЖЕНИЯ ПОЕЗДОВ ДЛЯ КРУПНЫХ ЖЕЛЕЗНОДОРОЖНЫХ СТАНЦИЙ | 2009 |
|
RU2403162C1 |
| МИКРОПРОЦЕССОРНАЯ СИСТЕМА ЦЕНТРАЛИЗАЦИИ СТРЕЛОК И СИГНАЛОВ | 2011 |
|
RU2495778C2 |
Изобретение относится к железнодорожной автоматике и телемеханике для управления движением поездов на станциях и на промышленных предприятиях. Технический результат заключается в обеспечении возможности логического контроля функционирования устройств сигнализации, централизации и блокировки и действий дежурного по станции с формированием предупреждающих сообщений. Технический результат достигается за счет того, что релейно-процессорная электрическая централизация состоит из автоматизированного рабочего места дежурного по станции, автоматизированного рабочего места электромеханика, локальной вычислительной сети, подсистемы управления станцией, причем автоматизированное рабочее место дежурного по станции и автоматизированного рабочего места электромеханика соединены посредством локальной вычислительной сети с подсистемой управления станцией, включающей сервер управления централизацией, соединенный с концентратором информации управления и с концентратором информации диагностики, причем концентратором информации управления соединен через локальную сеть CAN с блоками телесигнализации, блоками телеуправления, блоками ответственного телеуправления, а концентратор информации диагностики соединен через локальную сеть CAN с блоками телеизмерения напряжения и блоками телеизмерения сопротивления изоляции, также блоки телесигнализации, телеуправления, ответственного телеуправления, телеизмерения напряжения, телеизмерения сопротивления изоляции подключены к релейной исполнительной группе централизации. 10 з.п. ф-лы, 1 ил.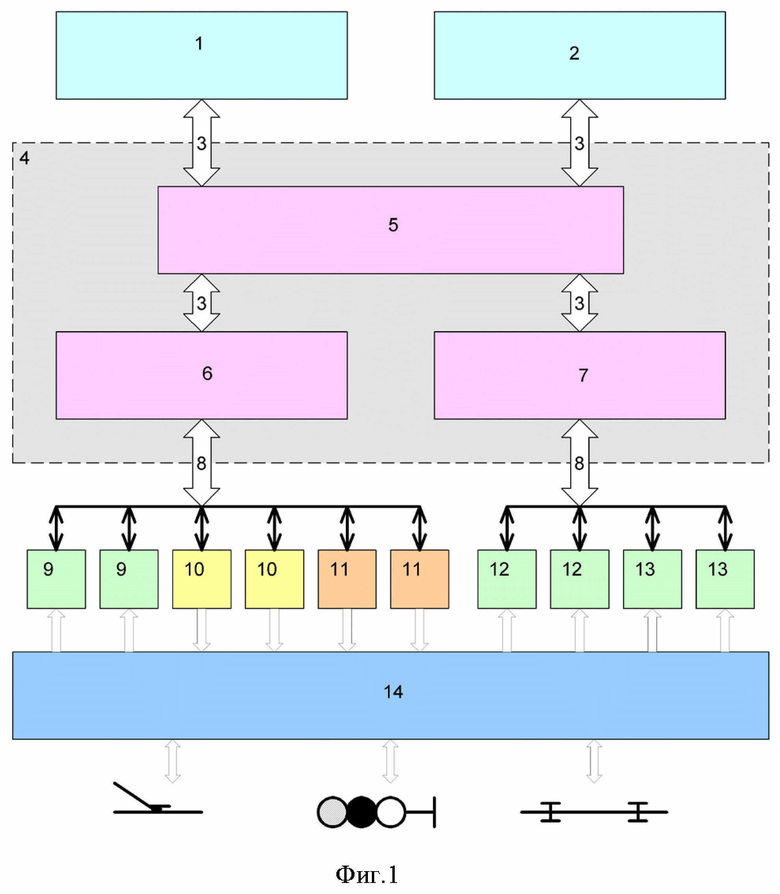
1. Релейно-процессорная электрическая централизация, состоящая из по меньшей мере одного автоматизированного рабочего места дежурного по станции, по меньшей мере одного автоматизированного рабочего места электромеханика, по меньшей мере одной локальной вычислительной сети, подсистемы управления станцией, причем автоматизированное рабочее место дежурного по станции и автоматизированного рабочего места электромеханика соединены посредством локальной вычислительной сети с подсистемой управления станцией, включающей сервер управления централизацией, соединенный с концентратором информации управления и с концентратором информации диагностики, причем концентратором информации управления соединен через локальную сеть CAN с блоками телесигнализации, блоками телеуправления, блоками ответственного телеуправления, а концентратор информации диагностики соединен через локальную сеть CAN с блоками телеизмерения напряжения и блоками телеизмерения сопротивления изоляции, также блоки телесигнализации, телеуправления, ответственного телеуправления, телеизмерения напряжения, телеизмерения сопротивления изоляции подключены к релейной исполнительной группе централизации.
2. Релейно-процессорная электрическая централизация по п. 1, отличающаяся тем, что автоматизированное рабочее место дежурного по станции выполнено с возможностью интеллектуальной поддержки принятия решений на базе нейросетевых алгоритмов, а также управления устройствами СЦБ в режимах маршрутного или раздельного управления, или ввода ответственных команд, отображения визуальной и голосовой информации.
3. Релейно-процессорная электрическая централизация по п. 1, отличающаяся тем, что автоматизированное рабочее дежурного по станции выполнено с возможностью логического контроля действий ДСП с формированием предупреждающих сообщений, на основе графического и голосового оповещения дежурного по станции.
4. Релейно-процессорная электрическая централизация по п. 1, отличающаяся тем, что автоматизированное рабочее место электромеханика выполнено с возможностью логического и параметрического контроля функционирования устройств сигнализации, централизации и блокировки с формированием предупреждающих сообщений, на основе графического и голосового оповещения электромеханика, а также с возможностью просмотра протоколов архивных событий, их классификации по различным критериям и поиска событий в архивной базе протоколов.
5. Релейно-процессорная электрическая централизация по п. 1, отличающаяся тем, что локальная вычислительная сеть представляет собой оптическую вычислительную сеть с Ethernet окончанием.
6. Релейно-процессорная электрическая централизация по п. 1, отличающаяся тем, что подсистема управления станцией выполнена с возможностью осуществления функций формирования команд для концентратора информации управления, получения информации от концентратора информации диагностики, протоколирования технологических событий и действий дежурного по станции.
7. Релейно-процессорная электрическая централизация по п. 1, отличающаяся тем, что блок телесигнализации выполнен с возможностью осуществления контроля состояния объектов релейной исполнительной группы централизации и передачи полученной информации в концентратор информации.
8. Релейно-процессорная электрическая централизация по п. 1, отличающаяся тем, что блок телеуправления выполнен с возможностью реализации команд неответственного управления, поступающих от концентратора информации.
9. Релейно-процессорная электрическая централизация по п. 1, отличающаяся тем, что блок ответственного телеуправления выполнен с возможностью реализации команд ответственного управления, поступающих от концентратора информации.
10. Релейно-процессорная электрическая централизация по п. 1, отличающаяся тем, что блок телеизмерения выполнен с возможностью осуществления контроля параметров объектов исполнительной группы централизации и передачи полученной информации в концентратор информации.
11. Релейно-процессорная электрическая централизация по п. 1, отличающаяся тем, что блок телеизмерения сопротивления изоляции выполнен с возможностью осуществления контроля сопротивления изоляции объектов исполнительной группы централизации и передачи полученной информации в концентратор информации.
| 0 |
|
SU92645A1 | |
| Сумматор параллельного действия | 1959 |
|
SU126667A1 |
| РЕЛЕЙНО-КОМПЬЮТЕРНАЯ ЦЕНТРАЛИЗАЦИЯ | 2003 |
|
RU2265541C2 |
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |
| Автомобиль-сани, движущиеся на полозьях посредством устанавливающихся по высоте колес с шинами | 1924 |
|
SU2017A1 |

