Изобретение относится к области позиционирования железнодорожных подвижных единиц, в частности к задачам определения местоположения подвижной единицы на полигоне железной дороги.
Известные устройства определения местоположения железнодорожных подвижных единиц используют следующие элементы: рельсовые цепи, датчики счета осей [Патент «ПУТЕВОЙ ДАТЧИК» №2317222, РФ, Тильк И.Г., Сергеев Б.С., Ляной В.В., Кривда М.А., Патент «Путевой датчик» №2370394, РФ, Клековкин А.А., Редькин А.С., Никитин А.Н.], индуктивно-проводные датчики, фотоэлектронные устройства, радиотехнические датчики. Недостатками этих устройств являются: высокая стоимость устройств, трудоемкость при установке, настройке и обслуживании, невозможность оснащения всех путей сети дорог, особенно находящихся в собственности ветвевладельцев.
Кроме этого известны устройства связанные с использованием спутниковых технологий [Патент «Устройство для управления движением поездов с помощью искусственных спутников Земли» №2454348, РФ, Дикарев В.И., Журкович В.В., Сергеева В.Г., Журкович А.В., Михайлов В.А., Патент «Система управления движением локомотивов при маневровой работе» №2422315, РФ, Е.Н. Розенберг, A.M. Замышляев, Б.М. Гордон, И.Н. Розенберг, А.Г. Савицкий, В.М. Каинов, Г.Д. Казиев, С.Б. Кузин, С.И. Долганюк, В.И. Уманский]. Недостатком этих устройств является подверженность влиянию различных помех и возникновение ошибки определения координат, связанное с неидеальным прохождением сигнала (из-за интерференции, вызванной рельефом местности, из-за задержек распространения сигнала, связанных с прохождением атмосферы, и др.).
Наиболее близким по техническому исполнению к предложенному устройству является устройство [Патент «Устройство и способ для создания сигнала местоположения» №2509021, РФ, Пухерт Андре (Германия), Сименс Акциенгезелльшафт (Германия)], содержащее устройство обработки данных, камеру. Основной задачей данного способа является высокоточное позиционирование рельсового транспортного средства по результатам сравнения геометрических параметров опорных объектов на видеоизображении и определения расстояния до них. Например, в точках посадки и высадки пассажиров, таких как защитные двери перрона, поскольку посадка и высадка пассажиров затрудняется или невозможна, когда двери рельсового транспортного средства не находятся противоположно защитным дверям перрона. При этом позиционирование транспортного средства определяется по ординате x(t), а расстояние до опорного объекта - xm(t). Указанный способ решает задачи определения расстояния по пути следования и факта остановки подвижной единицы. Однако определение направления движения при проходе стрелочного перевода не осуществляется, тем самым не рассматривается возможность позиционирования подвижной единицы на полигоне, имеющем путевое развитие.
Недостатками данного способа являются:
- необходимость установки на перегоне опорных объектов;
- зависимость точности позиционирования от количества опорных объектов;
- необходимость заранее вносить в память опорный объект;
- существенные погрешности определения местоположения при движении по криволинейным участкам пути;
- не осуществляется определение направления движения при проходе стрелочного перевода.
Общим недостатком указанных способов определения местоположения является отсутствие универсального технического решения для железнодорожной подвижной единицы, формирующего достоверную информацию о местоположении подвижной единицы на всем рассматриваемом железнодорожном полигоне, вне зависимости от таких условий, как: род тяги, оснащенность участка устройствами регулирования движения поездов, сетью опорных объектов, наличие каналов связи, ландшафта местности и др.
Заявленное изобретение направлено на решение задачи определения местоположения железнодорожной подвижной единицы. Техническим результатом заявляемого изобретения является позиционирование на полигоне железной дороги с точностью работы устройства измерения пройденного расстояния, определение направления движения при проходе стрелочных переводов по видеоизображению и отображение местоположения на схематическом плане полигона.
Устройство размещается на подвижной единице (локомотиве, диагностическом комплексе, вагоне и др.), так чтобы в область обзора видеокамер попадал железнодорожный путь и прилегающая территория.
Заявленное устройство на основе данных оптических датчиков (видеокамер) и измерителя пройденного расстояния позволяет производить формирование сигнала местоположения железнодорожной подвижной единицы.
Сущность изобретения состоит в том, что в устройстве создания сигнала местоположения, содержащем камеру и устройство обработки данных, отличающемся тем, что в него введены N-1 оптических датчиков, М источников света, измеритель пройденного расстояния, промышленный компьютер, входами устройства являются входы оптических датчиков и измерителя пройденного расстояния, выходы оптических датчиков подключены к входам промышленного компьютера, выходы измерителя пройденного расстояния подключены к входам промышленного компьютера, выходом устройства является выход промышленного компьютера, на котором формируется сигнал местоположения подвижной единицы на основе распознавания на видеоизображении, полученном при перемещении железнодорожной подвижной единицы по железнодорожным путям, следующих технологических ситуаций: проход стрелочного перевода по плюсовому положению, проход стрелочного перевода по минусовому положению, начало движения, остановка движения, а также тип и номер стрелочного перевода, тип и обозначение светофора.
На фиг. 1 представлена функциональная схема устройства позиционирования подвижной единицы.
Устройство состоит из оптических датчиков 1i, i=1,N, источников света 2i, i=1,M, измерителя пройденного расстояния 3, промышленного компьютера 4.
Входами устройства являются входы оптических датчиков 1i, i=1,N и измерителя пройденного расстояния 3.
Выходы оптических датчиков 1i, i=1,N подключены к входам промышленного компьютера 4. Выходы измерителя пройденного расстояния 3 подключены к входам промышленного компьютера 4.
Выходом устройства является выход промышленного компьютера 4 с сигналом местоположения подвижной единицы.
В качестве оптических датчиков 1i, i=1,N могут использоваться видеокамеры. В качестве источников света 2i i=1,M могут использоваться лампы накаливания, светодиоды видимого или инфракрасного излучения, лазерные источники света. В качестве измерителя пройденного расстояния 3 могут использоваться одометр, датчик Доплера и др.
Устройство работает следующим образом.
Источники света 2i, i=1,M, обеспечивают необходимый для работы оптических датчиков 1i, i=1,N уровень освещенности. Видеоданные с оптических датчиков 1i, i=1,N поступают на входы промышленного компьютера 4. Сигнал с измерителя пройденного расстояния 3 поступает на вход промышленного компьютера 4.
На основе видеоданных с оптических датчиков 1i, i=1,N, сигналов с измерителя пройденного расстояния 3 и данных, имеющихся в базе данных полигона, хранящихся в промышленном компьютере 4, происходит автоматическое распознавание следующих технологических ситуаций: проход стрелочного перевода по плюсовому положению (без изменения направления движения), проход стрелочного перевода по минусовому положению (с отклонением от первоначального направления), начало движения, остановка движения, кроме этого распознается тип и номер стрелочного перевода (номер стрелочного перевода указан на поверхности привода стрелочного перевода или табличке), тип и обозначение светофора (тип определяется по количеству сигнальных головок, обозначение определяется по табличке).
При движении подвижной единицы сигнал о местоположении подвижной единицы формируется по сигналу с измерителя пройденного расстояния 3.
При распознавании в видеосигнале объектов, находящихся в базе данных полигона, в момент проследования объекта формируется сигнал местоположения подвижной единицы, соответствующий базе данных полигона. В результате обнуляется накапливаемая ошибка регистрации пройденного расстояния. Объектами распознавания могут быть элементы путевого развития и инфраструктуры железнодорожного полигона: стрелочный перевод, светофор, аппаратура автоматики, путевые знаки (километровый знак, пикет, знаки начала и конца кривой) и др.
При движении до следующего объекта, находящегося в базе данных полигона, сигнал о местоположении подвижной единицы формируется по сигналу с измерителя пройденного расстояния.
Для формирования сигнала местоположения может использоваться математический аппарат мягких вычислений, позволяющий осуществлять распознавание и обработку объектов на видеоизображениях [Duda, R.O., Hart, Р.Е. Use of the Hough Transform to detect lines and curves in pictures // Comm. ACM 15, 1972. pp. 11-15, Alahi A., Ortiz R., Vandergheynst P. FREAK: Fast Retina Keypoint // IEEE Conference on Computer Vision and Pattern Recognition, 2012, 510-517, Артемьев И.С., Долгий А.И., Суханов A.B., Хатламаджиян А.Е. Нейроиммунная модель классификации в задачах идентификации на транспорте // Интегрированные модели и мягкие вычисления в искусственном интеллекте. Сборник научных трудов VII-й Международной научно-технической конференции (Коломна, 20-22 мая 2013 г.). В 3-х томах. Т.3. - М.: Физматлит, 2013. С. 980-987].
Использование элементов путевого развития и инфраструктуры в качестве опорных объектов позволяет получить сигнал местоположения подвижной единицы в двух координатах.
Простота и точность устройства позиционирования железнодорожной подвижной единицы делает его весьма перспективной при разработке информационно-управляющих систем на железнодорожном транспорте.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство определения параметров узлов подвижного состава | 2016 |
|
RU2668774C2 |
| Устройство для позиционирования и определения скорости железнодорожных подвижных единиц | 2020 |
|
RU2738768C1 |
| Устройство счета железнодорожных подвижных единиц | 2022 |
|
RU2779670C1 |
| Система управления движением поездов | 2021 |
|
RU2753988C1 |
| Система для позиционирования железнодорожного подвижного состава при закреплении механизированными устройствами | 2022 |
|
RU2788208C1 |
| Робот-сигналист и система ограждения места работ и оповещения работающих на перегоне при капитальном ремонте пути | 2023 |
|
RU2817645C1 |
| Система технического и коммерческого контроля состояния поездов | 2019 |
|
RU2728202C1 |
| Способ диагностики продольного профиля железнодорожных путей сортировочного парка | 2022 |
|
RU2779427C1 |
| Гибридное устройство маршрутизации | 2019 |
|
RU2710503C1 |
| Способ содержания путей железнодорожного сортировочного парка на основе данных видеоаналитики | 2024 |
|
RU2836946C1 |
Изобретение относится к области железнодорожного транспорта, в частности к позиционированию подвижных единиц. Устройство позиционирования содержит камеру и блок обработки данных, дополнительно введены N-1 оптических датчиков, М источников света, измеритель пройденного расстояния, промышленный компьютер. Входами устройства являются входы оптических датчиков и измерителя пройденного расстояния, выходы оптических датчиков подключены к входам промышленного компьютера, выходы измерителя пройденного расстояния подключены к входам промышленного компьютера, выходом устройства является выход промышленного компьютера. Сигнал местоположения подвижной единицы формируется на промышленном компьютере на основе распознавания на видеоизображении, полученном при перемещении железнодорожной подвижной единицы по железнодорожным путям, следующих технологических ситуаций: проход стрелочного перевода по плюсовому положению, проход стрелочного перевода по минусовому положению, начало движения, остановка движения, а также тип и номер стрелочного перевода, тип и обозначение светофора. Достигается повышение точности позиционирования подвижной единицы. 1 ил.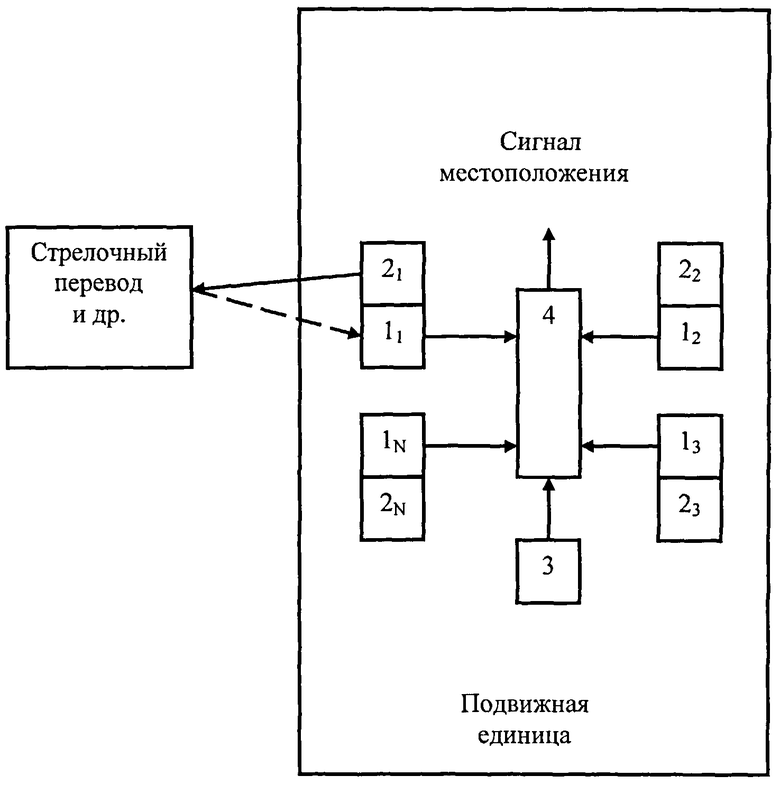
Устройство позиционирования железнодорожной подвижной единицы, содержащее камеру и блок обработки данных, отличающееся тем, что в него введены N-1 оптических датчиков, М источников света, измеритель пройденного расстояния, промышленный компьютер, входами устройства являются входы оптических датчиков и измерителя пройденного расстояния, выходы оптических датчиков подключены к входам промышленного компьютера, выходы измерителя пройденного расстояния подключены к входам промышленного компьютера, выходом устройства является выход промышленного компьютера, на котором формируется сигнал местоположения подвижной единицы на основе распознавания на видеоизображении, полученном при перемещении железнодорожной подвижной единицы по железнодорожным путям, следующих технологических ситуаций: проход стрелочного перевода по плюсовому положению, проход стрелочного перевода по минусовому положению, начало движения, остановка движения, а также тип и номер стрелочного перевода, тип и обозначение светофора.
| RU 2011100827 A , 20.07.2012 | |||
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА, ПЕРЕМЕЩАЮЩЕГОСЯ ВДОЛЬ СРЕДСТВА РАСПРОСТРАНЕНИЯ ЭЛЕКТРОМАГНИТНЫХ ВОЛН | 1996 |
|
RU2181680C2 |
| WO 2007091072 A1, 16.08.2007 | |||
| Счетная машина | 1934 |
|
SU49498A1 |

