Область техники, к которой относится изобретение
Настоящее изобретение относится к системам защиты от превышения скорости на изгибе дороги.
Уровень техники
[1] Системы защиты от превышения скорости на изгибе дороги предоставляют способ водителям транспортного средства для регулирования характера вождения, если скорость приближения к изгибу является слишком высокой. Важным отличительным признаком таких систем может быть предоставление выходного сигнала, указывающего завышенную скорость на изгибе, так что водитель может предпринимать корректирующее действие. Однако, текущие механизмы, чтобы предоставлять выходной сигнал, касающийся ситуации завышенной скорости, не предоставляют выходной сигнал, нацеленный, настроенный или откалиброванный для водителя.
Сущность изобретения
В одном варианте осуществления охарактеризована система, содержащая компьютер, включающий в себя процессор и память, при этом память хранит инструкции, исполняемые компьютером, чтобы: собирать данные о приближающемся изгибе, скорости и ускорении транспортного средства; определять выходное значение внимания к изгибу, которое является показателем скорости транспортного средства, ускорения транспортного средства и кривизны приближающегося изгиба, по меньшей мере частично, на основе данных; приводить в действие механизм вывода в носимом устройстве с первой интенсивностью, когда выходное значение внимания к изгибу равно или превышает первое пороговое значение и ниже второго порогового значения; и приводить в действие механизм вывода со второй интенсивностью, когда выходное значение внимания к изгибу равно или превышает второе пороговое значение и ниже третьего порогового значения.
В дополнительном варианте осуществления инструкции включают в себя инструкции, чтобы приводить в действие механизм вывода с третьей интенсивностью, когда выходное значение внимания к изгибу равно или превышает третье пороговое значение.
В дополнительном варианте осуществления механизм вывода является тактильным механизмом вывода.
В дополнительном варианте осуществления выходное значение внимания к изгибу основывается, по меньшей мере частично, на поперечном ускорении транспортного средства, заданной величине кривизны на основе кривизны приближающегося изгиба и скорости транспортного средства.
В дополнительном варианте осуществления выходное значение внимания к изгибу определяется по сумме: нормализованного поперечного ускорения, которое является текущим поперечным ускорением, разделенным на максимальное поперечное ускорение и умноженным на первую адаптивную константу; нормализованной заданной величины кривизны, которая является текущей заданной величиной кривизны, разделенной на максимальную заданную величину кривизны и умноженной на вторую адаптивную константу; и нормализованной скорости транспортного средства, которая является разностью между максимальной рекомендованной скоростью транспортного средства и текущей скоростью транспортного средства, разделенной на максимальное изменение в скорости транспортного средства и умноженной на третью адаптивную константу.
В дополнительном варианте осуществления первая, вторая и третья адаптивные константы и максимальное поперечное ускорение, заданная величина кривизны и изменение в скорости транспортного средства являются регулируемыми на основе идентификации пассажира транспортного средства.
В дополнительном варианте осуществления максимальная скорость является рекомендованной скоростью транспортного средства, собранной, по меньшей мере, от одной из системы глобального позиционирования, картографического сервера и системы предупреждения о завышенной скорости на изгибе.
В дополнительном варианте осуществления данные включают в себя метеорологическую информацию.
В дополнительном варианте осуществления инструкции включают в себя инструкции, чтобы регулировать первое пороговое значение и второе пороговое значение на основе идентификации пассажира транспортного средства.
В дополнительном варианте осуществления инструкции включают в себя инструкции, чтобы приводить в действие механизм вывода с третьей интенсивностью, когда выходное значение внимания к изгибу равно или превышает третье пороговое значение, третье пороговое значение основано на идентификации пассажира транспортного средства.
В еще одном варианте осуществления охарактеризован способ, содержащий этапы, на которых: собирают данные о приближающемся изгибе, скорости и ускорении транспортного средства; определяют выходное значение внимания к изгибу, которое является показателем скорости транспортного средства, ускорения транспортного средства и кривизны приближающегося изгиба, по меньшей мере частично, на основе данных; приводят в действие механизм вывода в носимом устройстве с первой интенсивностью, когда выходное значение внимания к изгибу равно или превышает первое пороговое значение и ниже второго порогового значения; и приводят в действие механизм вывода со второй интенсивностью, когда выходное значение внимания к изгибу равно или превышает второе пороговое значение и ниже третьего порогового значения.
В дополнительном варианте осуществления приводят в действие механизм вывода с третьей интенсивностью, когда выходное значение внимания к изгибу равно или превышает третье пороговое значение.
В дополнительном варианте осуществления механизм вывода является тактильным механизмом вывода.
В дополнительном варианте осуществления выходное значение внимания к изгибу основывается, по меньшей мере частично, на поперечном ускорении транспортного средства, заданной величине кривизны на основе кривизны приближающегося изгиба и скорости транспортного средства.
В дополнительном варианте осуществления выходное значение внимания к изгибу определяется по сумме: нормализованного поперечного ускорения, которое является текущим поперечным ускорением, разделенным на максимальное поперечное ускорение и умноженным на первую адаптивную константу; нормализованной заданной величины кривизны, которая является текущей заданной величиной кривизны, разделенной на максимальную заданную величину кривизны и умноженной на вторую адаптивную константу; и нормализованной скорости транспортного средства, которая является разностью между максимальной рекомендованной скоростью транспортного средства и текущей скоростью транспортного средства, разделенной на максимальное изменение в скорости транспортного средства и умноженной на третью адаптивную константу.
В дополнительном варианте осуществления первая, вторая и третья адаптивные константы и максимальное поперечное ускорение, заданная величина кривизны и изменение в скорости транспортного средства являются регулируемыми на основе идентификации пассажира транспортного средства.
В дополнительном варианте осуществления максимальная скорость является рекомендованной скоростью транспортного средства, собранной, по меньшей мере, от одной из системы глобального позиционирования, картографического сервера и системы предупреждения о завышенной скорости на изгибе.
В дополнительном варианте осуществления данные включают в себя метеорологическую информацию.
В дополнительном варианте осуществления идентифицируют пассажира транспортного средства и регулируют первое пороговое значение и второе пороговое значение на основе идентификации пассажира транспортного средства.
В дополнительном варианте осуществления приводят в действие механизм вывода с третьей интенсивностью, когда выходное значение внимания к изгибу равно или превышает третье пороговое значение, третье пороговое значение основано на идентификации пассажира транспортного средства.
Краткое описание чертежей
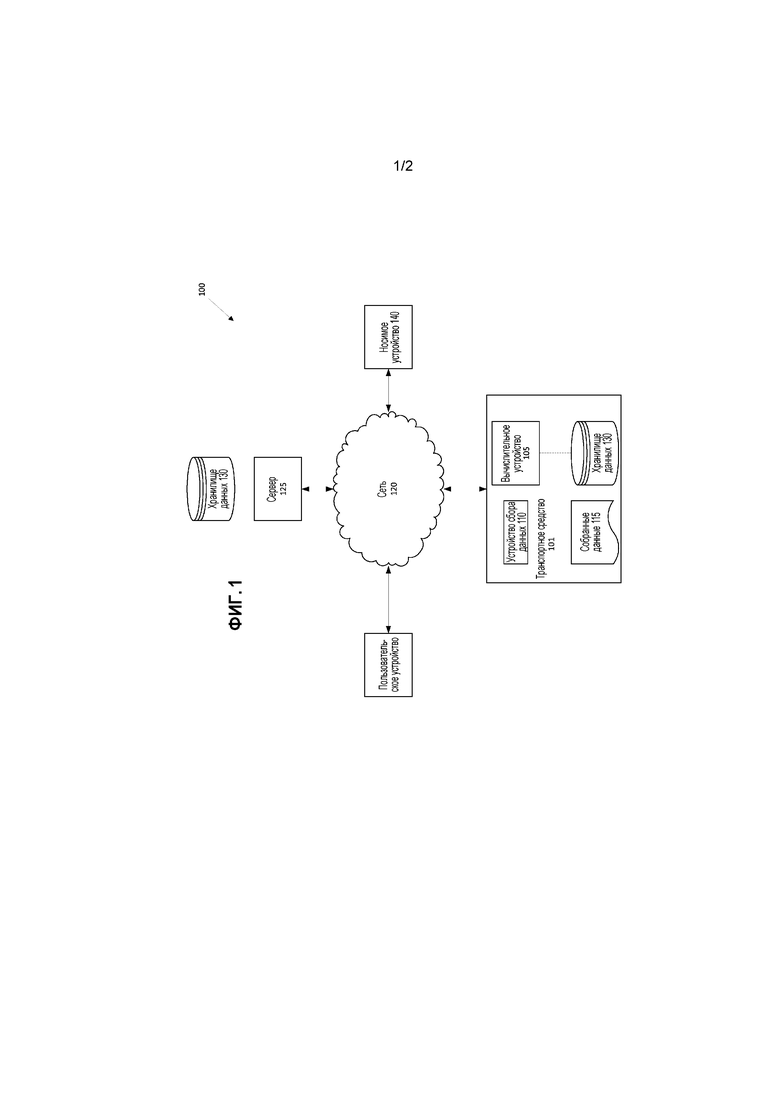
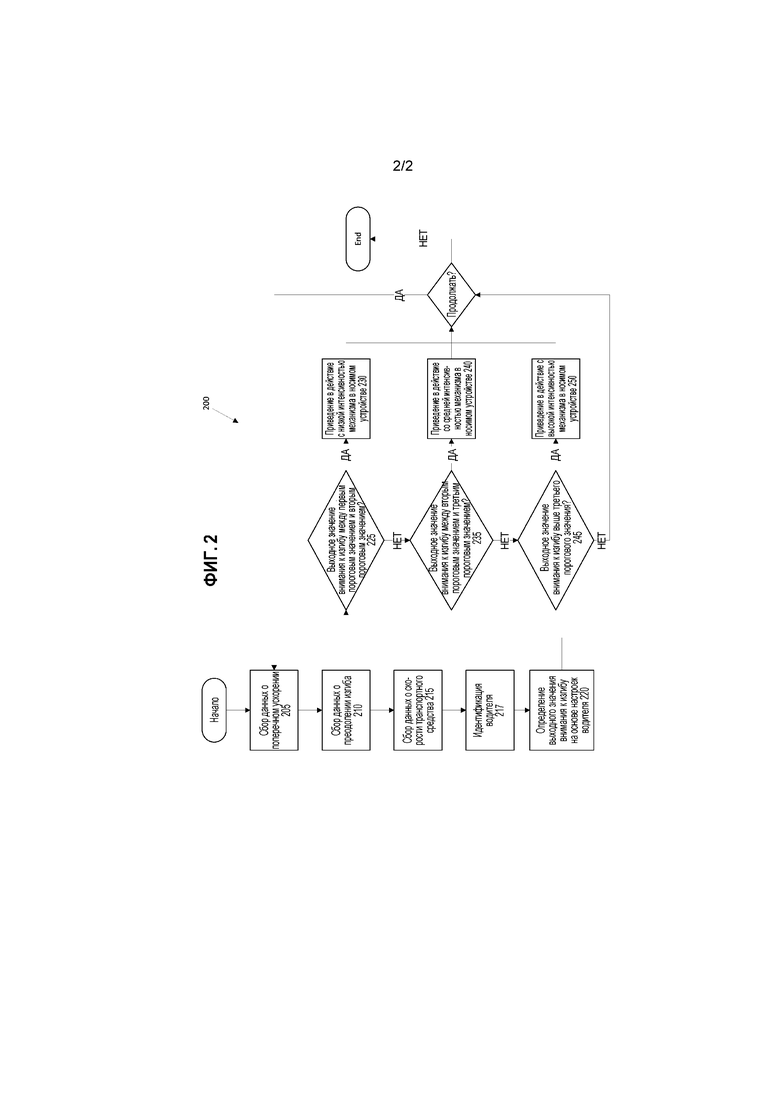
[2] Фиг. 1 - это блок-схема примерной системы, включающей в себя носимое устройство, предоставляющее выходной сигнал, указывающий на привлечение внимания к приближающемуся изгибу.
[3] Фиг. 2 - это блок-схема примерного процесса для предоставления указания преодоления изгиба от носимого устройства.
Подробное описание изобретения
[4] Фиг. 1 иллюстрирует систему 100, включающую в себя носимое устройство 140, соединенное с возможностью обмена данными с вычислительным устройством 105 транспортного средства 101. Вычислительное устройство 105 программируется, чтобы принимать собранные данные 115, от одного или более устройств 110 сбора данных, например, датчиков транспортного средства 101, касающиеся различных показателей, относящихся к транспортному средству 101. Например, показатели могут включать в себя скорость транспортного средства 101, ускорение и/или замедление транспортного средства 101, данные, относящиеся к пути транспортного средства 101 или рулевому управлению, включающему в себя поперечное ускорение, извилистость дороги, биометрические данные, относящиеся к оператору транспортного средства 101, например, сердечный ритм, дыхание, расширение зрачка, температура тела, состояние сознания и т.д. Дополнительные примеры таких показателей могут включать в себя значения измерений систем и компонентов транспортного средства (например, рулевой системы, системы силового агрегата, тормозной системы, датчиков внутреннего состояния, датчиков внешнего состояния и т.д.). Вычислительное устройство 105 может быть запрограммировано, чтобы собирать данные 115 от транспортного средства 101, в котором оно установлено, иногда называемого рассматриваемым транспортным средством 101, и/или может быть запрограммировано, чтобы собирать данные 115 о втором транспортном средстве 101, например, целевом транспортном средстве.
[5] Вычислительное устройство 105, как правило, программируется для связи по шине локальной сети контроллеров (CAN) или т.п. Вычислительное устройство 105 может также иметь соединение с бортовым диагностическим разъемом (OBD-II). Через CAN-шину, OBD-II и/или другие проводные или беспроводные механизмы вычислительное устройство 105 может передавать сообщения различным устройствам в транспортном средстве и/или принимать сообщения от различных устройств, например, контроллеров, актуаторов, датчиков и т.д., включающих в себя устройства 110 сбора данных. Альтернативно или дополнительно, в случаях, когда вычислительное устройство 105 фактически содержит множество устройств, CAN-шина или т.п. может быть использована для связи между устройствами, представленными как вычислительное устройство 105 в этом описании изобретения. Кроме того, вычислительное устройство 105 может быть запрограммировано для связи с сетью 120, которая, как описано ниже, может включать в себя различные проводные и/или беспроводные технологии сетевого взаимодействия, например, сотовые, Bluetooth, проводные и/или беспроводные сети с коммутацией пакетов и т.д.
[6] Вычислительное устройство 105 может быть запрограммировано, чтобы предоставлять предупреждение во время завышенной скорости на изгибе дороги, как является известным, процессор, хранящий инструкции, чтобы определять, собирается ли транспортное средство 101 покинуть текущую полосу движения, и, после такого определения, приводить в действие один или более механизмов транспортного средства без вмешательства водителя, например, торможение, руление, дроссельную заслонку и т.д. Дополнительно, вычислительное устройство 105 может включать в себя или быть соединенным с выходным механизмом, чтобы указывать скорость выше рекомендованной для приближающегося изгиба, например, звуки и/или визуальные индикаторы, предоставляемые через HMI транспортного средства 101.
[7] Хранилище 106 данных может быть любого известного типа, например, накопителями на жестких дисках, твердотельными накопителями, серверами или любыми энергозависимыми или энергонезависимыми носителями. Хранилище 106 данных может хранить накопленные данные 115, отправленные от устройств 110 сбора данных.
[8] Устройства 110 сбора данных могут включать в себя множество устройств. Например, различные контроллеры в транспортном средстве могут работать как устройства 110 сбора данных, чтобы предоставлять данные 115 через CAN-шину, например, данные 115, относящиеся к скорости транспортного средства, ускорению, функциональности системы и/или компонента, и т.д., любого числа транспортных средств 101, включающих в себя рассматриваемое транспортное средство и/или целевое транспортное средство. Дополнительно, датчики или т.п., оборудование системы глобального позиционирования (GPS) и т.д. могут быть включены в транспортное средство и сконфигурированы в качестве устройств 110 сбора данных, чтобы предоставлять данные непосредственно компьютеру 105, например, через проводное или беспроводное соединение. Устройства 110 сбора данных датчиков могут включать в себя такие механизмы как радиолокационные, лидарные, сонарные и т.д. датчики, которые могут быть применены, чтобы измерять расстояние между транспортным средством 101 и другими транспортными средствами или объектами. Еще одни устройства 110 сбора данных могут включать в себя камеры, алкотестеры, датчики движения и т.д., т.е., устройства 110 сбора данных, чтобы предоставлять данные 115 для оценки условия или состояния оператора транспортного средства 101.
[9] Накопленные данные 115 могут включать в себя множество данных, накопленных в транспортном средстве 101. Примеры накопленных данных 115 предоставлены выше, и, кроме того, данные 115, в целом, собираются с помощью одного или более устройств 110 сбора данных и могут дополнительно включать в себя данные, вычисленные из них в компьютере 105 и/или на сервере 125. В целом, накопленные данные 115 могут включать в себя любые данные, которые могут быть собраны посредством устройств 110 сбора данных и/или вычислены из таких данных. Вычислительное устройство 105 может использовать собранные данные 115, чтобы создавать профиль внимания к изгибу для пассажира. Профиль внимания к изгибу может содержать стили или характеристики вождения пассажира, например, возраст, опыт вождения и т.д., а также собранные данные 115, например, состояние дороги, поперечное ускорение, кривизну приближающегося изгиба, движение транспортного средства 101, и т.д. Профиль внимания к изгибу может быть использован вычислительным устройством 105, чтобы обнаруживать изгиб, требующий внимания пассажира. Профиль внимания к изгибу включает в себя предварительно определенные пороговые значения, максимальные значения параметра и адаптивные константы, описанные ниже. Вычислительное устройство 105 может создавать несколько профилей внимания к изгибу для различных пассажиров и сохранять их в хранилище 106 данных.
[10] Система 100 дополнительно может включать в себя сеть 120, соединенную с сервером 125 и хранилищем 130 данных. Компьютер 105 дополнительно может быть запрограммирован с возможностью обмениваться данными с одним или более удаленных веб-узлов, к примеру, с сервером 125, через сеть 120, причем такой удаленный веб-узел, возможно, включает в себя хранилище 130 данных. Сеть 120 представляет один или более механизмов, посредством которых компьютер 105 транспортного средства может обмениваться данными с удаленным сервером 125. Соответственно, сеть 120 может представлять собой один или более различных механизмов проводной или беспроводной связи, включающих в себя любую требуемую комбинацию механизмов проводной (например, кабельной и волоконной) и/или беспроводной (например, сотовой, беспроводной, спутниковой, микроволновой и радиочастотной) связи и любую требуемую топологию сети (или топологии, когда используются несколько механизмов связи). Примерные сети передачи данных включают в себя беспроводные сети передачи данных (например, использующие Bluetooth, IEEE 802.11 и т.д.), локальные вычислительные сети (LAN) и/или глобальные вычислительные сети (WAN), включающие в себя Интернет, предоставляющие услуги передачи данных.
[11] Сервер 125 может быть запрограммирован, чтобы определять подходящее действие для одного или более транспортных средств 101 и предоставлять инструкцию компьютеру 105, чтобы поступать соответствующим образом. Сервер 125 может быть одним или более компьютерными серверами, каждый, как правило, включает в себя, по меньшей мере, один процессор и, по меньшей мере, одну память, память хранит инструкции, исполняемые процессором, включающие в себя инструкции для выполнения различных этапов и процессов, описанных в данном документе. Сервер 125 может включать в себя или быть соединен с возможностью обмена данными с хранилищем 130 данных для хранения накопленных данных 115, записей, относящихся к потенциальным инцидентам, сформировавшим, как описано в данном документе, профили отклонения от полосы движения, и т.д. Дополнительно, сервер 125 может хранить информацию, относящуюся к конкретному транспортному средству 101 и дополнительно одному или более другим транспортным средствам 101, функционирующим в географической области, условиям дорожного движения, погодным условиям и т.д. в географической области, относительно конкретной дороги, города и т.д. Сервер 125 может быть запрограммирован, чтобы предоставлять предупреждающие сигналы конкретному транспортному средству 101 и/или другим транспортным средствам 101.
[12] Носимое устройство 140 может быть любым устройством из множества вычислительных устройств, включающих в себя процессор и память, а также функциональные возможности связи, которое программируется, чтобы быть носимым на теле водителя. Например, носимое устройство 140 может быть часами, интеллектуальными часами, вибрирующим устройством и т.д., которое включает в себя функциональные возможности для беспроводной связи с помощью протоколов IEEE 802.11, Bluetooth и/или протоколов сотовой связи. Дополнительно, носимое устройство 140 может использовать такие возможности связи, чтобы связываться по сети 120, а также непосредственно с компьютером 105 транспортного средства, например, с помощью Bluetooth.
[13] Система 100 может включать в себя пользовательское устройство 150. Пользовательское устройство 150 может быть любым устройством из множества вычислительных устройств, включающих в себя процессор и память, например, смартфоном, планшетом, персональным цифровым помощником, и т.д., пользовательское устройство 150 может использовать сеть 120, чтобы связываться с компьютером 105 транспортного средства и носимым устройством 140.
[14] Фиг. 2 иллюстрирует примерный процесс 200 для использования носимого устройства 140 вместе с программированием в компьютере 105, чтобы определять завышенную скорость на изгибе, как обсуждалось выше, во время цикла вождения. Процесс 200 начинается на этапе 205, на котором вычислительное устройство 105 собирает данные 115 о поперечном ускорении транспортного средства 101, являющимся ускорением, перпендикулярным переднему движению транспортного средства 101.
[15] Далее, на этапе 210, вычислительное устройство 105 собирает данные 115 по преодолению изгиба для транспортного средства 101, т.е., движению транспортного средства 101 около изгиба на основе кривизны изгиба. Данные о преодолении изгиба могут включать в себя заданную величину кривизны, основывающуюся на данных о кривизне, принятых от сервера 125, например, от системы глобального позиционирования и/или картографического сервера или системы технического зрения, полученных через CAN-шину транспортного средства 101. Заданная величина кривизны являются инверсией радиуса кривизны изгиба. Радиус кривизны является показателем радиуса дуги окружности, определенной изгибом.
[16] Далее, на этапе 215, вычислительное устройство 105 собирает данные 115 о скорости транспортного средства от устройств 110 сбора данных.
[17] Далее, на этапе 217, вычислительное устройство 105 идентифицирует водителя транспортного средства. Вычислительное устройство 105 может идентифицировать водителя одним или более способами, например, принимая данные от одного или более из носимого устройства 140, пользовательского устройства 150 и/или устройств 110 сбора данных. Например, как известно, пассажир может быть идентифицирован с помощью технологий распознавания изображения в компьютере 105 с помощью данных 115 от устройства 110 сбора данных камеры, личность пользователя может быть введена через устройство 140 HMI транспортного средства 101, или устройство 140 может идентифицировать пользователя, т.е., пассажира транспортного средства 101, через накопленные биометрические данные, например, отпечаток пальца, и т.д. После идентификации пассажира вычислительное устройство 105 может извлекать из своего хранилища 106 данных информацию о пассажире, включающую в себя возраст, размер, уровень мастерства вождения, предпочтительные механизмы для приема информации (например, тактильный, звуковой и т.д.), профиль отклонения от полосы движения, и т.д.
[18] Далее, на этапе 220, вычислительное устройство 105 определяет выходное значение внимания к изгибу. Например, выходное значение внимания к изгибу может быть определено посредством следующего уравнения:

где,  является выходным значением внимания к изгибу,
является выходным значением внимания к изгибу,  является функцией абсолютного значения,
является функцией абсолютного значения,  является поперечным ускорением транспортного средства 101,
является поперечным ускорением транспортного средства 101,  является исходной величиной кривизны,
является исходной величиной кривизны,  является скоростью транспортного средства 101 для скоростей транспортного средства более
является скоростью транспортного средства 101 для скоростей транспортного средства более 
 ссылается на рекомендованный максимум параметра в скобках. Например,
ссылается на рекомендованный максимум параметра в скобках. Например,  является максимальной рекомендованной скоростью для приближающегося изгиба и/или ограничением скорости для дороги,
является максимальной рекомендованной скоростью для приближающегося изгиба и/или ограничением скорости для дороги,  является максимальным рекомендованным поперечным ускорением для приближающегося изгиба, а
является максимальным рекомендованным поперечным ускорением для приближающегося изгиба, а  является максимальной кривизной для приближающегося изгиба. Рекомендации могут быть собраны, например, с сервера 125, из хранилища 106 данных и/или профиля внимания к изгибу.
является максимальной кривизной для приближающегося изгиба. Рекомендации могут быть собраны, например, с сервера 125, из хранилища 106 данных и/или профиля внимания к изгибу.  является отклонением скорости от целевой скорости, а
является отклонением скорости от целевой скорости, а  является максимальным отклонением скорости от максимальной целевой скорости. вычисляется и нормализуется до значения между 0 и 1. Значения ближе к 1, например, ≥ 0,75, требуют более высокого внимания к изгибу, чем, например, (0,5 ≤ < 0,75), и, например, (0,3≤ < 0,50). Кроме того, если скорость транспортного средства на приближающемся изгибе, полученная из GPS/карт, больше рекомендованной скорости транспортного средства, тогда
является максимальным отклонением скорости от максимальной целевой скорости. вычисляется и нормализуется до значения между 0 и 1. Значения ближе к 1, например, ≥ 0,75, требуют более высокого внимания к изгибу, чем, например, (0,5 ≤ < 0,75), и, например, (0,3≤ < 0,50). Кроме того, если скорость транспортного средства на приближающемся изгибе, полученная из GPS/карт, больше рекомендованной скорости транспортного средства, тогда  задается в 1.
задается в 1.
[19] Определение максимальных значений для вычисления может быть основано на характеристике управляемости транспортного средства, геометрии проезжей части дороги и объявленных ограничениях скорости. Например, максимальное поперечное ускорение , основанное на характеристики управляемости транспортного средства, может быть выбрано как 4,5 м/с2.  может быть выбрано как 4,4 м/с. Максимальная кривизна определяется как коэффициент радиуса кривизны, который предоставляется из конструкции дороги. Например, радиус кривизны может быть выбран как 498 м, чтобы вычислять кривизну.
может быть выбрано как 4,4 м/с. Максимальная кривизна определяется как коэффициент радиуса кривизны, который предоставляется из конструкции дороги. Например, радиус кривизны может быть выбран как 498 м, чтобы вычислять кривизну.
[20] Константы  являются адаптивными константами, которые взвешивают каждое из поперечного ускорения, заданной величины кривизны и скорости. Адаптивные константы могут быть предварительно определены для водителя и перечислены в водительском профиле внимания к изгибу. Адаптивные константы могут быть настраиваемыми на основе, например, погодных условий. Например, могут быть выбраны как (0,75, 0,05, 0,20), соответственно, чтобы увеличивать вклад поперечного ускорения в плохие погодные условия. Кроме того, константы могут быть выбраны так, что максимальный вклад каждого из показателей почти одинаково взвешивается для вычисления значения (например, 0,34, 0,33 и 0,33). Кроме того, если некоторые данные недоступны, например, если объявленное ограничение скорости или информация о кривизне недоступна, значение будет зависеть исключительно от поперечного ускорения.
являются адаптивными константами, которые взвешивают каждое из поперечного ускорения, заданной величины кривизны и скорости. Адаптивные константы могут быть предварительно определены для водителя и перечислены в водительском профиле внимания к изгибу. Адаптивные константы могут быть настраиваемыми на основе, например, погодных условий. Например, могут быть выбраны как (0,75, 0,05, 0,20), соответственно, чтобы увеличивать вклад поперечного ускорения в плохие погодные условия. Кроме того, константы могут быть выбраны так, что максимальный вклад каждого из показателей почти одинаково взвешивается для вычисления значения (например, 0,34, 0,33 и 0,33). Кроме того, если некоторые данные недоступны, например, если объявленное ограничение скорости или информация о кривизне недоступна, значение будет зависеть исключительно от поперечного ускорения.
[21] Далее, на этапе 225, вычислительное устройство 105 определяет, находится ли выходное значение внимания к изгибу между первым пороговым значением и вторым пороговым значением, т.е., превышает или равно первому пороговому значению и ниже второго порогового значения. Примерный набор первых и вторых пороговых значений может составлять  . Первые и вторые пороговые значения могут быть предварительно определены и сохранены в водительском профиле внимания к изгибу и могут быть определены, например, на основе возраста водителя, опыта, истории вождения и т.д. Например, неопытный водитель может иметь более низкое первое пороговое значение, чтобы учитывать увеличенное время реакции, опытный водитель может иметь более высокое первое пороговое значение и т.д. Если выходное значение внимания к изгибу находится между первым пороговым значением и вторым пороговым значением, процесс продолжается на этапе 230. Иначе, процесс продолжается на этапе 235.
. Первые и вторые пороговые значения могут быть предварительно определены и сохранены в водительском профиле внимания к изгибу и могут быть определены, например, на основе возраста водителя, опыта, истории вождения и т.д. Например, неопытный водитель может иметь более низкое первое пороговое значение, чтобы учитывать увеличенное время реакции, опытный водитель может иметь более высокое первое пороговое значение и т.д. Если выходное значение внимания к изгибу находится между первым пороговым значением и вторым пороговым значением, процесс продолжается на этапе 230. Иначе, процесс продолжается на этапе 235.
[22] На этапе 230 вычислительное устройство 105 предоставляет инструкцию носимому устройству 140 активировать один или более механизмов вывода с первой интенсивностью. Механизмы вывода могут включать в себя тактильный вывод, например, вибрацию, звуковой вывод и/или визуальный вывод, например, мигающие лампы, мигающие цвета и т.д. На основе информации с этапа 205 один или более механизмов вывода могут быть выбраны согласно пассажиру. Например, пассажир, который плохо слышит, может иметь более сильный вибрирующий вывод, в то время как другой пассажир может предпочитать визуальный вывод. Преимущественно, вычислительное устройство 105 может быть запрограммировано, например, включая в себя настройку порогового значения на этапе 225, чтобы инструктировать активацию вывода носимого устройства, прежде чем сигнал тревоги, предупреждение или действие уклонения реализуется посредством традиционной системы предупреждения о завышенной скорости на изгибе, например, системы, которая предоставляет указание, или реагирует, на завышенную скорость на изгибе, активируя фонари, звуковые сирены, тормоза и т.д. транспортного средства прежде проезда изгиба. Таким образом, водитель транспортного средства 101 в контексте настоящей системы 100 может предпринимать корректирующее и/или уклоняющее действие раньше, и более безопасным образом, чем в существующих в настоящее время системах. Процесс 200 затем продолжается на этапе 255.
[23] На этапе 235 вычислительное устройство 105 определяет, находится ли выходное значение внимания к изгибу между вторым пороговым значением и третьим пороговым значением, т.е., превышает или равно второму пороговому значению и ниже третьего порогового значения. Примерный набор вторых и третьих пороговых значений может составлять  . Третье пороговое значение может быть предварительно определено и сохранено в профиле внимания к изгибу или может быть собрано с сервера 125, например, из данных глобального позиционирования, или может быть определено посредством системы защиты от завышенной скорости на изгибе. Если выходное значение внимания к изгибу находится между вторым пороговым значением и третьим пороговым значением, процесс 200 продолжается на этапе 240. Иначе, процесс 200 продолжается на этапе 245.
. Третье пороговое значение может быть предварительно определено и сохранено в профиле внимания к изгибу или может быть собрано с сервера 125, например, из данных глобального позиционирования, или может быть определено посредством системы защиты от завышенной скорости на изгибе. Если выходное значение внимания к изгибу находится между вторым пороговым значением и третьим пороговым значением, процесс 200 продолжается на этапе 240. Иначе, процесс 200 продолжается на этапе 245.
[24] На этапе 240 вычислительное устройство 105 предоставляет инструкцию носимому устройству 140 приводить в действие механизм вывода со второй интенсивностью. Вторая интенсивность может быть сильнее первой интенсивности, например, более громкий звук, более сильная вибрация, более яркий свет и т.д., чтобы указывать пользователю повышенную опасность риска приближающегося изгиба для транспортного средства 101. Процесс 200 затем продолжается на этапе 255.
[25] На этапе 245 вычислительное устройство 105 определяет, превышает ли выходное значение внимания к изгибу или равно третьему пороговому значению. Если выходное значение внимания к изгибу превышает или равно третьему пороговому значению, процесс 200 продолжается на этапе 250. Иначе, процесс 200 продолжается на этапе 255.
[26] На этапе 250 вычислительное устройство 105 предоставляет инструкцию носимому устройству 140 приводить в действие механизм вывода с третьей интенсивностью. Третья интенсивность может быть более сильной, чем первая и вторая интенсивности, указывая водителю наивысшую опасность приближающегося изгиба. Процесс 200 затем продолжается на этапе 255.
[27] На этапе 255 вычислительное устройство 105 определяет, продолжать ли наблюдение за приближающимися изгибами, чтобы приводить в действие механизмы вывода. Если вычислительное устройство 105 определяет продолжение, процесс 200 возвращается к этапу 205, чтобы собирать больше данных. Иначе, процесс 200 заканчивается.
[28] Диапазоны для приведения в действие механизмов вывода с первой, второй и третьей интенсивностями на этапах 225, 235 и 245 являются инклюзивными относительно их нижних границ и эксклюзивными относительно их верхних границ. Т.е., когда выходное значение внимания к изгибу равно первому пороговому значению, вычислительное устройство 105 приводит в действие механизмы вывода в носимом устройстве 140 с первой интенсивностью. Для всех значений для выходного значения внимания к изгибу вплоть до, но не включающих в себя, второго порогового значения, механизмы вывода приводятся в действие с первой интенсивностью. Если выходное значение внимания к изгибу равно второму пороговому значению, вычислительное устройство 105 приводит в действие механизмы вывода в носимом устройстве 140 со второй интенсивностью, а не с первой интенсивностью. Аналогично, если выходное значение внимания к изгибу равно третьему пороговому значению, вычислительное устройство 105 приводит в действие механизмы вывода в носимом устройстве 140 с третьей интенсивностью, а не со второй интенсивностью. Речь идет об избегании неопределенности в программировании вычислительного устройства 105; если диапазон первой интенсивности на этапе 225 был инклюзивным относительно второго порогового значения, тогда вычислительное устройство 105 может приводить в действие механизмы вывода как с первой, так и со второй интенсивностями, когда выходное значение внимания к изгибу равно второму пороговому значению. Чтобы избегать ситуации, когда вычислительное устройство 105 инструктируется, чтобы приводить в действие механизмы вывода с двумя различными интенсивностями, диапазоны являются эксклюзивными относительно их верхних границ, так что, когда выходное значение внимания к изгибу равно одному из первого, второго или третьего пороговых значений, вычислительное устройство 105 может приводить в действие механизмы вывода лишь с одной соответствующей интенсивностью.
[29] Чтобы дополнительно иллюстрировать этот момент, диапазоны на этапах 225, 235 и 245 могут быть выбраны следующим образом:
первое пороговое значение≤CAout<второе пороговое значение -> первая интенсивность
второе пороговое значение≤CAout<третье пороговое значение -> вторая интенсивность
третье пороговое значение≤CAout -> третья интенсивность
[30] Использование знаков "меньше или равно" на нижних границах и знаков "меньше (но не равно)" на верхних границах указывает, что, когда выходное значение внимания к изгибу равно одному из пороговых значений, только одна интенсивность может быть использована.
[31] Когда используется в данном документе, наречие "практически", преобразующее прилагательное, означает, что форма, структура, показатель, значение, вычисление и т.д. может отклоняться от точно описанной геометрии, расстояния, показателя, значения, вычисления и т.д. вследствие несовершенств в материалах, механической обработке, производстве, показателя датчика, вычислениях, времени обработки, времени связи и т.д.
[32] Вычислительные устройства 105, как правило, каждое, включают в себя инструкции, исполняемые одним или более вычислительными устройствами, такими как идентифицированные выше, и для выполнения блоков или этапов процессов, описанных выше. Компьютерно-исполняемые инструкции могут быть компилированы или интерпретированы из компьютерных программ, созданных с использованием множества языков и/или технологий программирования, включающих в себя, без ограничения и отдельно или в комбинации, Java™, C, C++, Visual Basic, Java Script, Perl, HTML и т.д. В общем, процессор (например, микропроцессор) принимает инструкции, например, из памяти, компьютерно-читаемого носителя и т.д. и выполняет эти инструкции, за счет этого выполняя один или более процессов, включающих в себя один или более процессов, описанных в данном документе. Такие инструкции и другие данные могут быть сохранены и передаваться с помощью множества компьютерно-читаемых носителей. Файл в вычислительном устройстве 105, в целом, является совокупностью данных, сохраненных на считываемом компьютером носителе, таком как носитель хранения, оперативное запоминающее устройство и т.д.
[33] Компьютерно-читаемый носитель включает в себя любой носитель, который участвует в предоставлении данных (например, инструкций), который может быть считан посредством компьютера. Такой носитель может принимать множество форм, включающих в себя, но не только, энергонезависимые носители, энергозависимые носители и т.д. Энергонезависимые носители включают в себя, например, оптические или магнитные диски и другое постоянное запоминающее устройство. Энергозависимые носители включают в себя, например, динамическое оперативное запоминающее устройство (DRAM), которое типично составляет основную память. Обычные формы компьютерно-читаемых носителей включают в себя, например, гибкий диск, дискету, жесткий диск, магнитную ленту, любой другой магнитный носитель, CD-ROM, DVD, любой другой оптический носитель, перфорационную карту, бумажную ленту, любой другой физический носитель с рисунками отверстий, RAM, PROM, EPROM, FLASH-EEPROM, любую другую микросхему памяти или картридж, или любой другой носитель, с которого компьютер может выполнять считывание.
[34] Что касается носителей, процессов, систем, способов и т.д., описанных в данном документе, должно быть понятно, что, хотя этапы таких процессов и т.д. были описаны как происходящие согласно некой упорядоченной последовательности, такие процессы могут быть применены на практике с помощью описанных этапов, выполняемых в порядке, отличном от порядка, описанного в данном документе. Дополнительно должно быть понятно, что некоторые этапы могут выполняться одновременно, что другие этапы могут быть добавлены, или что некоторые этапы, описанные в данном документе, могут быть опущены. Другими словами, описания системы и/или процессов в данном документе предоставлены с целью иллюстрации некоторых вариантов осуществления и не должны никоим образом истолковываться как ограничивающие раскрытый предмет изучения.
[35] Соответственно, следует понимать, что настоящее раскрытие сущности, включающее в себя вышеприведенное описание и прилагаемые чертежи и нижеприведенную формулу изобретения, имеет намерение быть иллюстративным, а не ограничивающим. Многие варианты осуществления и применения, отличные от предоставленных примеров, будут понятны специалистам в области техники по прочтении вышеприведенного описания. Рамки изобретения должны быть определены, не со ссылкой на вышеприведенное описание, а вместо этого должны быть определены со ссылкой на формулу изобретения, приложенную к нему и/или включенную в непредварительную патентную заявку, основанную на данном описании, вместе с полными рамками эквивалентов, к которым такие пункты формулы изобретения приписаны. Ожидается и предполагается, что будущие разработки произойдут в технологиях, обсужденных в данном документе, и что раскрытые системы и способы будут включены в такие будущие варианты осуществления. В общем, следует понимать, что раскрытый предмет изобретения допускает модификацию и варьирование.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА И СПОСОБ ОБНАРУЖЕНИЯ ПРЕПЯТСТВИЙ | 2015 |
|
RU2706859C2 |
| УЛУЧШЕННОЕ ПРЕДОТВРАЩЕНИЕ СТОЛКНОВЕНИЙ | 2015 |
|
RU2708534C2 |
| УЛУЧШЕННАЯ РАБОТА СЕНСОРНОГО ЭКРАНА | 2015 |
|
RU2696978C1 |
| УЛУЧШЕННОЕ ОПОВЕЩЕНИЕ СИСТЕМЫ ТРАНСПОРТНОГО СРЕДСТВА | 2015 |
|
RU2709210C2 |
| СИСТЕМА И СПОСОБ ДЛЯ ПРЕДУПРЕЖДЕНИЯ О ПРИБЛИЖЕНИИ ТРАНСПОРТНОГО СРЕДСТВА | 2015 |
|
RU2687395C2 |
| СИСТЕМА И СПОСОБ ДЛЯ УЛУЧШЕННОГО ОБНАРУЖЕНИЯ ПОВЕДЕНИЯ В ПРЕДЕЛАХ ПОЛОСЫ ДВИЖЕНИЯ | 2015 |
|
RU2710125C2 |
| ТАКТИЛЬНЫЙ ВЫВОД В ТРАНСПОРТНОМ СРЕДСТВЕ | 2015 |
|
RU2703680C1 |
| УЛУЧШЕННАЯ ДОСТАВКА СООБЩЕНИЙ | 2015 |
|
RU2739913C2 |
| ОПРЕДЕЛЕНИЕ РАСПОЛОЖЕНИЯ ПОЛЬЗОВАТЕЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2016 |
|
RU2702243C2 |
| КОМПЬЮТЕР И СПОСОБ ОПРЕДЕЛЕНИЯ РАСПОЛОЖЕНИЯ ПОЛЬЗОВАТЕЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2016 |
|
RU2714360C2 |
Собираются данные о приближающемся изгибе, скорости и ускорении транспортного средства. Выходное значение внимания к изгибу, которое является показателем скорости транспортного средства, ускорения транспортного средства и кривизны приближающегося изгиба, определяется, по меньшей мере частично, на основе данных. Механизм вывода в носимом устройстве приводится в действие с первой интенсивностью, когда выходное значение внимания к изгибу превышает или равно первому пороговому значению и ниже второго порогового значения. Механизм вывода приводится в действие со второй интенсивностью, когда выходное значение внимания к изгибу превышает или равно второму пороговому значению и ниже третьего порогового значения. Предоставляют выходной сигнал, нацеленный, настроенный или откалиброванный для водителя 3 н. и 17 з.п. ф-лы, 2 ил.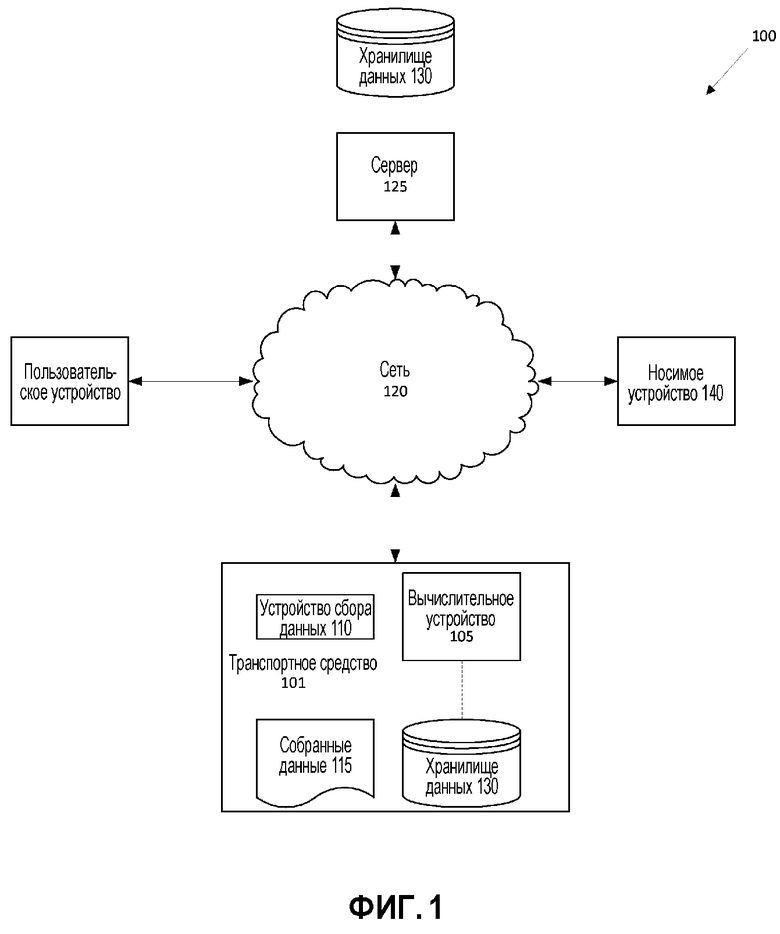
1. Система для предоставления предупреждения об изгибе дороги, содержащая компьютер, включающий в себя процессор и память, при этом память хранит инструкции, исполняемые компьютером, чтобы:
собирать данные о приближающемся изгибе, скорости и ускорении транспортного средства;
определять выходное значение внимания к изгибу, которое является показателем скорости транспортного средства, ускорения транспортного средства и кривизны приближающегося изгиба, по меньшей мере частично, на основе данных;
обеспечивать вывод в носимом устройстве с первой интенсивностью, когда выходное значение внимания к изгибу равно или превышает первое пороговое значение и ниже второго порогового значения; и
обеспечивать вывод со второй интенсивностью, когда выходное значение внимания к изгибу равно или превышает второе пороговое значение и ниже третьего порогового значения;
причем выходное значение внимания к изгибу основано частично на нормализованной скорости транспортного средства, которая является разностью между максимальной рекомендованной скоростью транспортного средства и текущей скоростью транспортного средства, разделенной на максимальное изменение в скорости транспортного средства.
2. Система по п. 1, в которой инструкции включают в себя инструкции, чтобы обеспечивать вывод с третьей интенсивностью, когда выходное значение внимания к изгибу равно или превышает третье пороговое значение.
3. Система по п. 1, в которой вывод является тактильным выводом.
4. Система по п. 1, в которой выходное значение внимания к изгибу основывается, по меньшей мере частично, на поперечном ускорении транспортного средства, заданной величине кривизны на основе кривизны приближающегося изгиба и скорости транспортного средства.
5. Система по п. 4, в которой выходное значение внимания к изгибу определяется по сумме:
нормализованного поперечного ускорения, которое является текущим поперечным ускорением, разделенным на максимальное поперечное ускорение и умноженным на первую адаптивную константу;
нормализованной заданной величины кривизны, которая является текущей заданной величиной кривизны, разделенной на максимальную заданную величину кривизны и умноженной на вторую адаптивную константу; и
нормализованной скорости транспортного средства, умноженной на третью адаптивную константу.
6. Система по п. 5, в которой первая, вторая и третья адаптивные константы и максимальное поперечное ускорение, заданная величина кривизны и изменение в скорости транспортного средства являются регулируемыми на основе идентификации пассажира транспортного средства.
7. Система по п. 5, в которой максимальная рекомендованная скорость транспортного средства является рекомендованной скоростью транспортного средства, собранной, по меньшей мере, от одной из системы глобального позиционирования, картографического сервера и системы предупреждения о завышенной скорости на изгибе.
8. Система по п. 1, в которой данные включают в себя метеорологическую информацию.
9. Система по п. 1, в которой инструкции включают в себя инструкции, чтобы регулировать первое пороговое значение и второе пороговое значение на основе идентификации пассажира транспортного средства.
10. Система по п. 9, в которой инструкции включают в себя инструкции, чтобы обеспечивать вывод с третьей интенсивностью, когда выходное значение внимания к изгибу равно или превышает третье пороговое значение, причем третье пороговое значение основано на идентификации пассажира транспортного средства.
11. Способ предоставления предупреждения об изгибе дороги, содержащий этапы, на которых:
собирают данные о приближающемся изгибе, скорости и ускорении транспортного средства;
определяют выходное значение внимания к изгибу, которое является показателем скорости транспортного средства, ускорения транспортного средства и кривизны приближающегося изгиба, по меньшей мере частично, на основе упомянутых данных;
обеспечивают вывод в носимом устройстве с первой интенсивностью, когда выходное значение внимания к изгибу равно или превышает первое пороговое значение и ниже второго порогового значения; и
обеспечивают вывод со второй интенсивностью, когда выходное значение внимания к изгибу равно или превышает второе пороговое значение и ниже третьего порогового значения;
причем выходное значение внимания к изгибу основано, частично на нормализованной скорости транспортного средства, которая является разностью между максимальной рекомендованной скоростью транспортного средства и текущей скоростью транспортного средства, разделенной на максимальное изменение в скорости транспортного средства.
12. Способ по п. 11, дополнительно содержащий этап, на котором обеспечивают вывод с третьей интенсивностью, когда выходное значение внимания к изгибу равно или превышает третье пороговое значение.
13. Способ по п. 11, в котором выходное значение внимания к изгибу основывается, по меньшей мере частично, на поперечном ускорении транспортного средства, заданной величине кривизны на основе кривизны приближающегося изгиба и скорости транспортного средства.
14. Способ по п. 13, в котором выходное значение внимания к изгибу определяется по сумме:
нормализованного поперечного ускорения, которое является текущим поперечным ускорением, разделенным на максимальное поперечное ускорение и умноженным на первую адаптивную константу;
нормализованной заданной величины кривизны, которая является текущей заданной величиной кривизны, разделенной на максимальную заданную величину кривизны и умноженной на вторую адаптивную константу; и
нормализованной скорости транспортного средства, умноженной на третью адаптивную константу.
15. Способ по п. 14, в котором первая, вторая и третья адаптивные константы и максимальное поперечное ускорение, заданная величина кривизны и изменение в скорости транспортного средства являются регулируемыми на основе идентификации пассажира транспортного средства.
16. Система для предоставления предупреждения об изгибе дороги, содержащая:
носимое устройство;
средство для сбора данных о приближающемся изгибе, скорости и ускорении транспортного средства;
средство для определения выходного значения внимания к изгибу, которое является показателем скорости транспортного средства, ускорения транспортного средства и кривизны приближающегося изгиба, по меньшей мере частично, на основе данных;
средство для обеспечения вывода в носимом устройстве с первой интенсивностью, когда выходное значение внимания к изгибу равно или превышает первое пороговое значение и ниже второго порогового значения; и
средство для обеспечения вывода со второй интенсивностью, когда выходное значение внимания к изгибу равно или превышает второе пороговое значение и ниже третьего порогового значения;
причем выходное значение внимания к изгибу основано частично, на нормализованной скорости транспортного средства, которая является разностью между максимальной рекомендованной скоростью транспортного средства и текущей скоростью транспортного средства, разделенной на максимальное изменение в скорости транспортного средства.
17. Система по п. 16, в которой носимое устройство включает в себя тактильное устройство.
18. Система по п. 16, дополнительно содержащая компьютер, запрограммированный для обеспечения вывода в носимое устройство.
19. Система по п. 16, дополнительно содержащая средство для обеспечения вывода с третьей интенсивностью, когда выходное значение внимания к изгибу равно или превышает третье пороговое значение.
20. Система по п. 16, в которой выходное значение внимания к изгибу основывается, по меньшей мере частично, на поперечном ускорении транспортного средства, заданной величине кривизны на основе кривизны приближающегося изгиба и скорости транспортного средства.
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |
| Устройство для закрепления лыж на раме мотоциклов и велосипедов взамен переднего колеса | 1924 |
|
SU2015A1 |
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |

