Область техники, к которой относится изобретение
Настоящее изобретение относится к системе и способу для улучшенного обнаружения поведения в пределах полосы движения.
Уровень техники
[1] Системы предупреждения о поведении в пределах полосы движения (LBW) предоставляют средство для водителей транспортных средств, чтобы регулировать свое поведение при вождении, если их поведение в пределах полосы движения является непредсказуемым. Такие системы могут указывать непредсказуемое поведение при вождении в пределах полосы движения, так что водитель транспортного средства может предпринимать корректирующее действие. Тем не менее, не все транспортные средства включают в себя LBW-системы и в силу этого не имеют средства указывать непредсказуемое поведение в пределах полосы движения.
Раскрытие сущности изобретения
В одном варианте осуществления охарактеризована система, содержащая компьютер, включающий в себя процессор и запоминающее устройство, причем запоминающее устройство сохраняет инструкции, выполняемые посредством компьютера для того, чтобы:
- определять значение обнаружения поведения в пределах полосы движения, которое является показателем перемещения запястья занимающего место в транспортном средстве; и
- приводить в действие механизм в носимом устройстве, когда значение обнаружения поведения в пределах полосы движения превышает пороговое значение.
В дополнительном варианте осуществления инструкции включают в себя инструкции для того, чтобы определять значение обнаружения поведения в пределах полосы движения, по меньшей мере, частично на основе перемещения руки занимающего место в транспортном средстве.
В дополнительном варианте осуществления механизм представляет собой механизм тактильного вывода.
В дополнительном варианте осуществления инструкции включают в себя инструкции для того, чтобы определять значение обнаружения поведения в пределах полосы движения в карманном пользовательском устройстве.
В дополнительном варианте осуществления инструкции включают в себя инструкции для того, чтобы определять значение обнаружения поведения в пределах полосы движения в карманном пользовательском устройстве и в носимом устройстве.
В дополнительном варианте осуществления инструкции включают в себя инструкции для того, чтобы определять значение обнаружения поведения в пределах полосы движения, по меньшей мере, частично на основе данных местоположения карманного пользовательского устройства.
В дополнительном варианте осуществления содержится, по меньшей мере, одно из акселерометра, гироскопа и глобальной системы позиционирования.
В дополнительном варианте осуществления носимое устройство включает в себя акселерометр.
В дополнительном варианте осуществления инструкции включают в себя инструкции для того, чтобы определять среднее значение обнаружения поведения в пределах полосы движения из набора предыдущих значений обнаружения поведения в пределах полосы движения.
В дополнительном варианте осуществления инструкции включают в себя инструкции для того, чтобы приводить в действие механизм, когда среднее значение обнаружения поведения в пределах полосы движения превышает пороговое значение.
В еще одном варианте осуществления охарактеризован способ, содержащий этапы, на которых:
- определяют значение обнаружения поведения в пределах полосы движения, которое является показателем перемещения запястья занимающего место в транспортном средстве; и
- приводят в действие механизм в носимом устройстве, когда значение обнаружения поведения в пределах полосы движения превышает пороговое значение.
В дополнительном варианте осуществления определяют значение обнаружения поведения в пределах полосы движения, по меньшей мере, частично на основе перемещения руки занимающего место в транспортном средстве.
В дополнительном варианте осуществления механизм представляет собой механизм тактильного вывода.
В дополнительном варианте осуществления определяют значение обнаружения поведения в пределах полосы движения в карманном пользовательском устройстве.
В дополнительном варианте осуществления определяют значение обнаружения поведения в пределах полосы движения в карманном пользовательском устройстве и носимом устройстве.
В дополнительном варианте осуществления определяют значение обнаружения поведения в пределах полосы движения, по меньшей мере, частично на основе данных местоположения карманного пользовательского устройства.
В дополнительном варианте осуществления содержится, по меньшей мере, одно из акселерометра, гироскопа и глобальной системы позиционирования.
В дополнительном варианте осуществления носимое устройство включает в себя акселерометр.
В дополнительном варианте осуществления определяют среднее значение обнаружения поведения в пределах полосы движения из набора предыдущих значений обнаружения поведения в пределах полосы движения.
В дополнительном варианте осуществления приводят в действие механизм, когда среднее значение обнаружения поведения в пределах полосы движения превышает пороговое значение.
Краткое описание чертежей
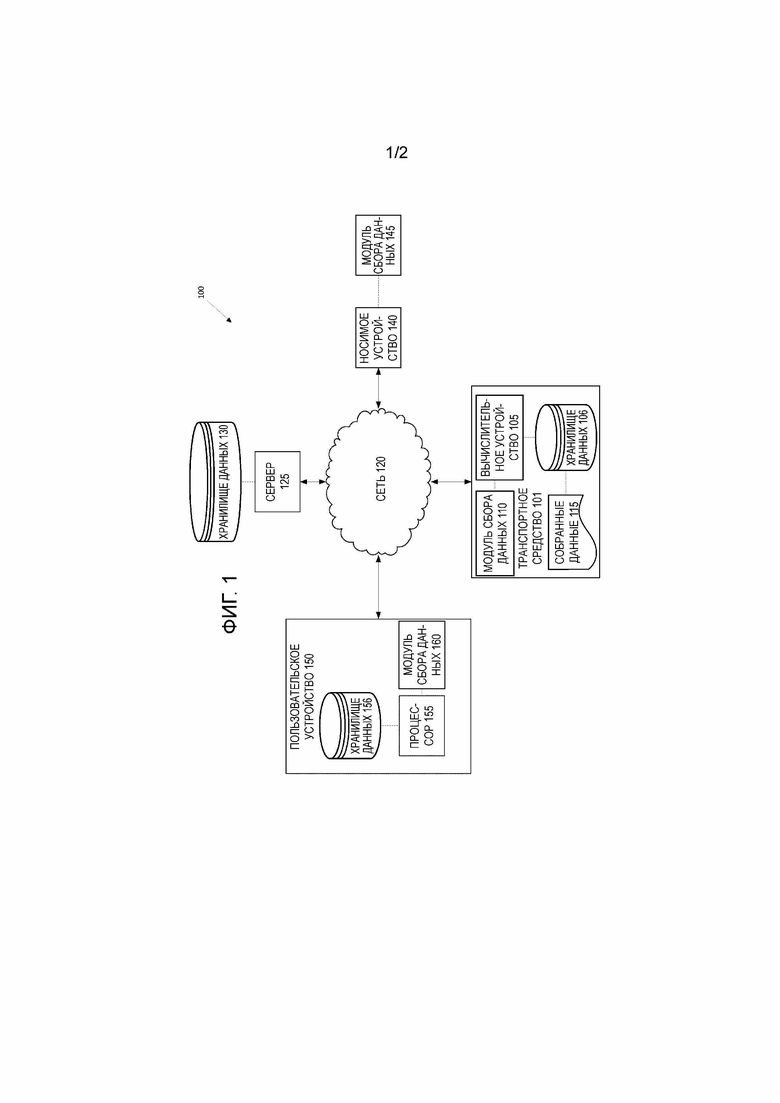
[2] Фиг. 1 является блок-схемой примерной системы, включающей в себя носимое устройство, предоставляющее вывод, указывающий поведение в пределах полосы движения.
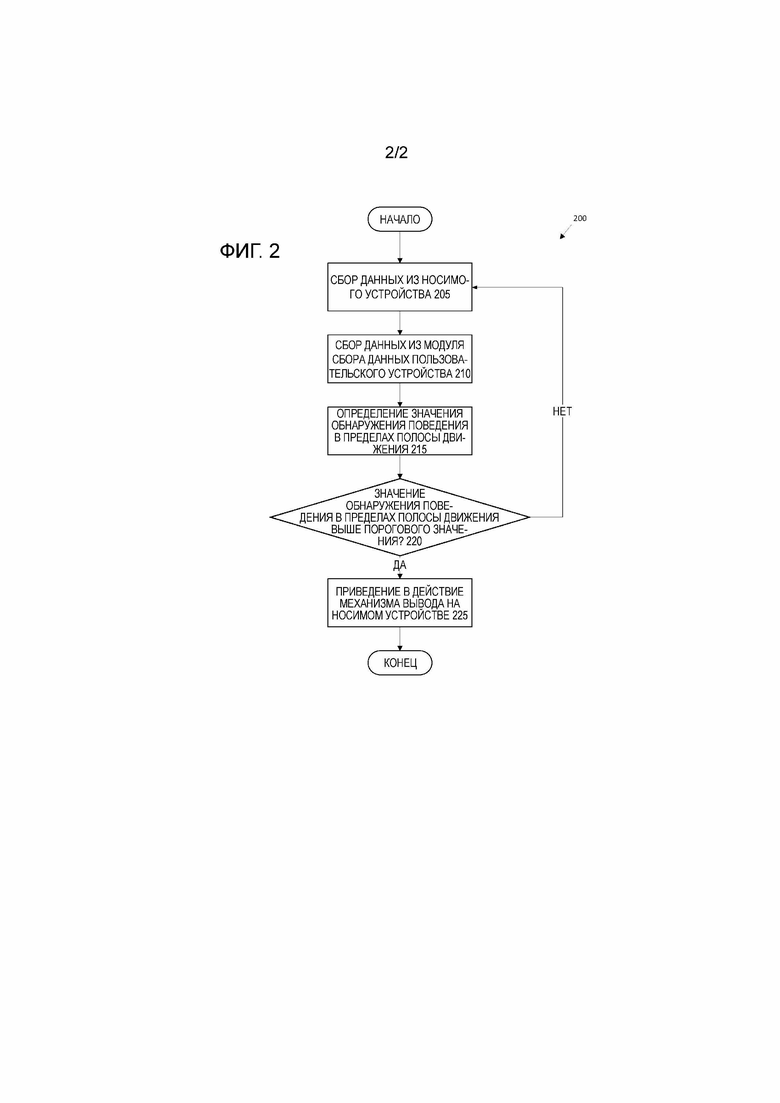
[3] Фиг. 2 является блок-схемой примерного процесса для предоставления индикатора поведения в пределах полосы движения.
Подробное описание изобретения
[4] Фиг. 1 иллюстрирует систему 100, включающую в себя носимое устройство 140, функционально соединенное с вычислительным устройством 105 транспортного средства 101. Вычислительное устройство 105 запрограммировано с возможностью принимать собранные данные 115 из одного или более модулей 110 сбора данных, например, датчиков транспортного средства 101, относительно различных показателей, связанных с транспортным средством 101. Например, показатели могут включать в себя скорость транспортного средства 101, ускорение и/или замедление транспортного средства 101, данные, связанные с посредством или рулением транспортного средства 101, биометрические данные, связанные с водителем транспортного средства 101, например, пульс, дыхание, расширение зрачка, температуру тела, состояние бодрствования и т.д. Дополнительные примеры таких показателей могут включать в себя измерения систем и компонентов транспортного средства (например, системы рулевого управления, системы силовой передачи, тормозной системы, внутренней сенсорной системы, внешней сенсорной системы и т.д.). Вычислительное устройство 105 может быть запрограммировано с возможностью собирать данные 115 из транспортного средства 101, в котором оно устанавливается, иногда называемого "рассматриваемым транспортным средством 101", и/или может быть запрограммировано с возможностью собирать данные 115 относительно второго транспортного средства 101, например, целевого транспортного средства.
[5] Вычислительное устройство 105, в общем, запрограммировано с возможностью связи по шине контроллерной сети (CAN) и т.п. Вычислительное устройство 105 также может иметь соединение с бортовым диагностическим разъемом (OBD-II). Через CAN-шину, OBD-II и/или другие проводные или беспроводные механизмы, вычислительное устройство 105 может передавать сообщения в различные устройства в транспортном средстве и/или принимать сообщения из различных устройств, например, контроллеров, актуаторов, датчиков и т.д., включающие в себя данные коллекторы 110. Альтернативно или дополнительно, в случаях, если вычислительное устройство 105 фактически содержит несколько устройств, CAN-шина и т.п. может использоваться для связи между устройствами, представленными в качестве вычислительного устройства 105 в этом раскрытии сущности. Помимо этого, вычислительное устройство 105 может быть запрограммировано с возможностью обмена данными с сетью 120, которая, как описано ниже, может включать в себя различные технологии проводных и/или беспроводных сетей, например, сотовые, Bluetooth-, проводные и/или беспроводные пакетные сети и т.д.
[6] Вычислительное устройство 105 может быть запрограммировано с возможностью формировать предупреждение о выезде за пределы полосы движения. Например, вычислительное устройство 105 может принимать собранные данные 115, связанные со скоростью, ускорением, замедлением, углом поворота при рулении, темпом изменения угла поворота при рулении, торможением транспортного средства 101 и т.д., и/или данные 115, связанные с дорогой, например, то, что транспортное средство 101 пересекает разделительные линии, варьирует поперечное расстояние от разделительных линий и т.д. На основе таких собранных данных 115 и возможно также профиля выезда за пределы полосы движения водителя транспортного средства 101, как пояснено ниже, компьютер 105 может, например, известным способом, определять то, что выезд за пределы полосы движения является неизбежным, и/или то, что транспортное средство 101 подвергается риску непреднамеренного выезда за пределы полосы движения выше предварительно определенного порогового значения, после чего может формироваться предупреждение о выезде за пределы полосы движения. Вычислительное устройство 105 дополнительно может сохранять инструкции для того, чтобы определять то, собирается или нет транспортное средство 101 выезжать за пределы текущей полосы движения, и при таком определении, приводить в действие один или более механизмов транспортного средства без вмешательства водителя, например, торможение, руление, дроссель и т.д. Дополнительно, вычислительное устройство 105 может включать в себя или соединяться с механизмом вывода, чтобы указывать потенциальный выезд за пределы полосы движения, например, звуки и/или визуальные индикаторы, предоставленные через HMI транспортного средства 101. Хранилище 106 данных может иметь любой известный тип, например, жесткие диски, полупроводниковые накопители, серверы или любые энергозависимые или энергонезависимые носители. Хранилище 106 данных типично сохраняет собранные данные 115, отправленные из модулей 110 сбора данных.
[7] Собранные данные 115 могут включать в себя множество данных, собранных в транспортном средстве 101. Примеры собранных данных 115 предоставляются выше, и кроме того, данные 115, в общем, собираются с использованием одного или более модулей 110 сбора данных и дополнительно могут включать в себе данные, вычисленные из них, в компьютере 105 и/или на сервере 125. В общем, собранные данные 115 могут включать в себя любые данные, которые могут собираться посредством модулей 110 сбора данных и/или вычисляться из таких данных.
[8] Система 100 дополнительно может включать в себя сеть 120, соединенную с сервером 125 и хранилищем 130 данных. Компьютер 105 дополнительно может быть запрограммирован с возможностью обмениваться данными с одним или более удаленных веб-узлов, к примеру, с сервером 125, через сеть 120, причем такой удаленный веб-узел, возможно, включает в себя хранилище 130 данных. Сеть 120 представляет один или более механизмов, посредством которых компьютер 105 транспортного средства может обмениваться данными с удаленным сервером 125. Соответственно, сеть 120 может представлять собой один или более различных механизмов проводной или беспроводной связи, включающих в себя любую требуемую комбинацию механизмов проводной (например, кабельной и волоконной) и/или беспроводной (например, сотовой, беспроводной, спутниковой, микроволновой и радиочастотной) связи и любую требуемую топологию сети (или топологии, когда используются несколько механизмов связи). Примерные сети связи включают в себя сети беспроводной связи (например, с использованием Bluetooth, IEEE 802.11 и т.д.), локальные вычислительные сети (LAN) и/или глобальные вычислительные сети (WAN), включающие в себя Интернет, предоставляющие услуги обмена данными.
[9] Сервер 125 может быть запрограммирован с возможностью определять соответствующее действие для одного или более транспортных средств 101 и предоставлять направление в компьютер 105, чтобы продолжать движение надлежащим образом. Сервер 125 может представлять собой один или более серверных компьютеров, каждый из которых, в общем, включает в себя, по меньшей мере, один процессор и, по меньшей мере, одно запоминающее устройство, причем запоминающее устройство сохраняет инструкции, выполняемые посредством процессора, включающие в себя инструкции для выполнения различных этапов и процессов, описанных в данном документе. Сервер 125 может включать в себя или функционально соединяться с хранилищем 130 данных для сохранения собранных данных 115, записей, связанных с потенциальными происшествиями, сформированных так, как описано в данном документе, профилей выезда за пределы полосы движения и т.д. Дополнительно, сервер 125 может сохранять информацию, связанную с конкретным транспортным средством 101 и дополнительно с одним или более других транспортных средств 101, работающих в географической области, условия движения, погодные условия и т.д., в географической области, относительно конкретной дороги, города и т.д. Сервер 125 может быть запрограммирован с возможностью предоставлять оповещения в конкретное транспортное средство 101 и/или другие транспортные средства 101.
[10] Носимое устройство 140 может представлять собой любое из множества вычислительных устройств, включающих в себя процессор и запоминающее устройство, а также возможности связи, которое запрограммировано с возможностью ношения на теле водителя. Например, носимое устройство 140 может представлять собой часы, интеллектуальные часы, вибрирующее устройство и т.д., которое включает в себя возможности для беспроводной связи с использованием IEEE 802.11, Bluetooth и/или протоколов сотовой связи. Дополнительно, носимое устройство 140 может использовать эти возможности связи для того, чтобы обмениваться данными через сеть 120 и также непосредственно с компьютером 105 транспортного средства, например, с использованием Bluetooth. Носимое устройство 140 может включать в себя, по меньшей мере, один модуль 145 сбора данных. Модуль 145 сбора данных может представлять собой датчик движения, например, акселерометр, гироскоп, глобальный датчик позиции или некоторый другой датчик движения. Устройство 140 может быть запрограммировано с возможностью, с использованием измерений из модуля 145 сбора данных, определять перемещение запястья и/или руки занимающего место в транспортном средстве 101, носящего устройство 140, например, чтобы определять перемещение руля транспортного средства 101, за счет этого предоставляя данные 115 в пользовательское устройство 150, чтобы определять поведение в пределах полосы движения. Модуль 145 сбора данных также может собирать данные по позиции носимого устройства 140, поперечной к движению вперед транспортного средства 101.
[11] Система 100 может включать в себя пользовательское устройство 150. Пользовательское устройство 150 может представлять собой любое из множества вычислительных устройств, включающих в себя процессор и запоминающее устройство, например, смартфон, планшетный компьютер, персональное цифровое устройство и т.д. Пользовательское устройство 150 может использовать сеть 120 для того, чтобы обмениваться данными с компьютером 105 транспортного средства и носимым устройством 140. Носимое устройство 140 может отправлять данные в пользовательское устройство 150 для обработки. Пользовательское устройство 150, в общем, включает в себя процессор 155, хранилище 156 данных и множество модулей 160 сбора данных. Модули 160 сбора данных могут включать в себя, например, датчик местоположения, камеру, модуль сбора аудио/видео и т.д.
[12] Пользовательское устройство 150 может использовать собранные данные 115, чтобы разрабатывать профиль поведения в пределах полосы движения для занимающего место в транспортном средстве 101. Профиль поведения в пределах полосы движения может включать привычки и характеристики вождения занимающего место, например, возраст, опыт вождения и т.д., а также собранные данные 115, например, состояние дороги, перемещение транспортного средства 101 и т.д. Например, более чувствительные пороговые значения предупреждения о поведении в пределах полосы движения могут устанавливаться для новичка или менее опытного водителя. Профиль поведения в пределах полосы движения может использоваться посредством пользовательского устройства 150 для того, чтобы обнаруживать поведение в пределах полосы движения, например, формировать предупреждение о поведении в пределах полосы движения для занимающего место в транспортном средстве 101. Пользовательское устройство 150 может создавать соответствующие профили поведения в пределах полосы движения для соответствующих водителей транспортного средства 101 и может сохранять профили в хранилище 156 данных.
[13] Модули 110, 160 сбора данных могут включать в себя множество устройств. Например, различные контроллеры в транспортном средстве могут работать в качестве модулей 110, 160 сбора данных, чтобы предоставлять данные 115 через CAN-шину и/или сеть 120, например, данные 115, связанные со скоростью, ускорением, функциональностью системы и/или компонентов транспортного средства и т.д., для любого числа транспортных средств 101. Дополнительно, датчики и т.п., оборудование глобальной системы позиционирования (GPS) и т.д., могут быть включены в транспортное средство 101 и/или пользовательское устройство 150 и сконфигурированы в качестве модулей 110, 160 сбора данных, чтобы предоставлять данные непосредственно в компьютер 105, например, через проводное или беспроводное соединение. Модули 110 сбора данных датчиков могут включать в себя такие механизмы, как радарные, лидарные, сонарные и т.д. датчики, которые могут развертываться, чтобы измерять расстояние между транспортным средством 101 и другими транспортными средствами или объектами. Еще одни другие модули 110, 160 сбора данных могут включать в себя камеры, алкогольно-респираторные трубки, детекторы движения и т.д., т.е. модули 110, 160 сбора данных, чтобы предоставлять данные 115 для оценки условия или состояния водителя транспортного средства 101.
[14] Фиг. 2 иллюстрирует примерный процесс 200 с использованием носимого устройства 140 и модуля 145 сбора данных. Процесс 200 начинается на этапе 205, на котором процессор 155 выполняет программирование, чтобы собирать данные из модуля 145 сбора данных. Процесс 200 альтернативно может выполняться в носимом устройстве 140 или компьютере 105 транспортного средства. В частности, данные могут включать в себя перемещение запястья и/или руки, собранное посредством модуля 145 сбора данных, например, акселерометра. Характерное перемещение запястья и/или руки занимающего место может указывать перемещение при рулении и последующее перемещение транспортного средства 101 в пределах полосы движения. Непредсказуемое поведение в пределах полосы движения может вызываться и/или обнаруживаться согласно повышенной переменности перемещения запястья и руки на руле транспортного средства, например, с использованием данных акселерометра устройства 140, как описано ниже. Данные, отправленные в процессор 155, могут быть необработанными данными, т.е. значениями, которые не преобразованы, модифицированы или иным образом обработаны, отправлены из модуля 145 сбора данных, и/или данными, обрабатываемыми посредством носимого устройства 140. Таким образом, носимое устройство 140 и пользовательское устройство 150 могут составлять систему распределенной обработки.
[15] Затем, на этапе 210, процессор 155 запрограммирован с возможностью собирать данные из модуля 160 сбора данных на пользовательском устройстве 150. Например, процессор 155 может быть запрограммирован с возможностью собирать данные местоположения, например, данные глобальной системы позиционирования (GPS), пользовательского устройства 150, чтобы определять изменение поперечного перемещения транспортного средства 101. В другом примере, модуль 145 сбора данных детектора движения может использоваться для того, чтобы определять поперечное перемещение носимого устройства 140, т.е. компонента перемещения устройства 140, который является практически перпендикулярным продольной оси и/или направлению движения транспортного средства 101. Изменения поперечной позиции пользовательского устройства 150 могут указывать перемещение транспортного средства 101 в полосе движения и могут использоваться при формировании предупреждения о поведении в пределах полосы движения. Кроме того, пользовательское устройство 150 может собирать данные 115 из модулей 110 сбора данных в транспортном средстве 101.
[16] Затем, на этапе 215, процессор 155 запрограммирован с возможностью определять значение обнаружения поведения в пределах полосы движения (LBD). LBD-значение характеризует поведение в пределах полосы движения занимающего место в транспортном средстве на основе перемещения запястья и/или руки носимого устройства 140 и изменения перемещения поперечной позиции пользовательского устройства 150. LBD-значение может определяться посредством рекурсивного вычисления среднего и среднеквадратического отклонения данных акселерометра из носимого устройства 140. Например, LBD-значение на основе данных ускорения может определяться на основе следующих уравнений:
 (1)
(1)
 (2)
(2)
 (3)
(3)
 , (4)
, (4)
где  является текущим значением акселерометра из носимого устройства 140,
является текущим значением акселерометра из носимого устройства 140,  является настраиваемым усилением между 0 и 1, которое может быть предварительно определено и сохранено в хранилище 156 данных и/или на сервере 125,
является настраиваемым усилением между 0 и 1, которое может быть предварительно определено и сохранено в хранилище 156 данных и/или на сервере 125,  является индексом, который начинается с 1 и обозначает индекс текущего значения,
является индексом, который начинается с 1 и обозначает индекс текущего значения,  является средним значением значений акселерометра, собранных между 1 и ,
является средним значением значений акселерометра, собранных между 1 и ,  является дисперсией значения акселерометра, и
является дисперсией значения акселерометра, и  является LBD-значением. LBD-значение может нормализоваться к значению между 0 и 1.
является LBD-значением. LBD-значение может нормализоваться к значению между 0 и 1.
[17] LBD-значение может определяться для соответствующих периодов времени и может агрегироваться и нормализоваться к значению между 0 и 1, чтобы получать персонифицированный признак поведения в пределах полосы движения водителя, сохраненный в хранилище 156 данных и/или на сервере 125. Более высокое LBD-значение (например, больше 0,8 и/или 2-3 среднеквадратических отклонения выше среднего LBD-значения) может указывать непредсказуемое поведение в пределах полосы движения с большей величиной поперечного перемещения в полосе движения, например, для водителя-новичка или водителя, применяющего технологии для транспортных средств со свободным рулением. Более низкое LBD-значение (например, меньше 0,3) может указывать устойчивое вождение. Аналогично, LBD-значение может определяться из рекурсивного вычисления среднего и среднеквадратического отклонения изменения поперечной позиции транспортного средства 101, определенного посредством пользовательского устройства 150. Например, LBD-значение на основе изменения поперечных данных может определяться на основе следующих уравнений:
 (5)
(5)
 (6)
(6)
 (7)
(7)
(8),
где  является значением текущей поперечной позиции, является настраиваемым усилением, как описано выше,
является значением текущей поперечной позиции, является настраиваемым усилением, как описано выше,  является средним значением изменения значения поперечной позиции от 1 до , является дисперсией значения поперечной позиции, и определяется так, как указано в уравнении 4, посредством взятия квадратного корня дисперсии . LBD-значение может нормализоваться к значению между 0 и 1.
является средним значением изменения значения поперечной позиции от 1 до , является дисперсией значения поперечной позиции, и определяется так, как указано в уравнении 4, посредством взятия квадратного корня дисперсии . LBD-значение может нормализоваться к значению между 0 и 1.
[18] Вычисленные LBD-значения могут использоваться отдельно или сравнительно отслеживаться, например, чтобы предоставлять оценку достоверности наиболее актуального LBD-значения. Процессор 155 может быть запрограммирован с возможностью определять среднее LBD-значение, представляющее собой среднее арифметическое набора LBD-значений за указанный период времени. Таким образом, носимое устройство 140 и пользовательское устройство 150 могут использоваться в любом транспортном средстве 101, даже в транспортном средстве 101, которое не имеет традиционной системы аварийных оповещений для согласования поведения в пределах полос движения. Процессор 155 может использовать данные 115 из носимого устройства 140, модулей 160 сбора данных пользовательского устройства и/или транспортного средства 101 для того, чтобы определять LBD-значение.
[19] Затем, на этапе 220, процессор 155 запрограммирован с возможностью определять то, выше или нет LBD-значение предварительно определенного порогового значения. Пороговое значение может определяться из нормализованного среднеквадратического отклонения данных 115 акселерометра из носимого устройства 140, например, 2-3 среднеквадратических отклонения из среднего значения ускорения носимого устройства 140, либо может сохраняться на сервере 125 и собираться посредством пользовательского устройства 150. Пороговое значение может регулироваться, чтобы учитывать конкретного занимающего место в транспортном средстве, либо может задаваться равным конкретному значению для конкретного транспортного средства 101. Процессор 155 может быть запрограммирован с возможностью использовать текущее LBD-значение или среднее LBD-значение. Если LBD-значение ниже порогового значения, процесс 200 возвращается к этапу 205, чтобы собирать дополнительные данные. В противном случае, процесс 200 продолжается на этапе 225.
[20] На этапе 225, процессор 155 предоставляет инструкцию в носимое устройство 140 для того, чтобы приводить в действие один или более механизмов вывода. Механизмы вывода могут включать в себя тактильный вывод, например, вибрацию, аудиовывод и/или видеовывод, например, мигающие фонари, мигающие цвета и т.д. Один или более механизмов вывода могут выбираться согласно занимающему место в транспортном средстве. Например, занимающий место в транспортном средстве, который имеет проблемы со слухом, может иметь более сильный вибрационный вывод, в то время как другой занимающий место в транспортном средстве может предпочитать видеовывод. Таким образом, водитель транспортного средства 101 в контексте настоящей системы 100 может корректировать свое поведение при вождении, например, для того, чтобы предпринимать действие по уклонению и/или объезду заблаговременно. Механизмы вывода могут приводиться в действие до, после и/или в сочетании с предупреждением о выезде за пределы полосы движения, сформированным посредством вычислительного устройства 105. Процесс 200 затем завершается.
[21] При использовании в данном документе, наречие "практически", модифицирующее прилагательное, означает то, что форма, конструкция, измерение, значение, вычисление и т.д. может отклоняться от точной описанной геометрии, расстояния, измерения, значения, вычисления и т.д. вследствие неидеальностей в материалах, машинной обработке, изготовлении, измерениях датчиков, вычислениях, времени обработки, времени связи и т.д.
[22] Вычислительные устройства 105, в общем, включают в себя инструкции, выполняемые посредством одного или более вычислительных устройств, к примеру, идентифицированных выше, и для выполнения блоков или этапов процессов, описанных выше. Компьютерно-исполняемые инструкции могут быть компилированы или интерпретированы из компьютерных программ, созданных с использованием множества языков и/или технологий программирования, включающих в себя, без ограничения и отдельно или в комбинации, Java™, C, C++, Visual Basic, Java Script, Perl, HTML и т.д. В общем, процессор (например, микропроцессор) принимает инструкции, например, из запоминающего устройства, компьютерно-читаемого носителя и т.д. и выполняет эти инструкции, за счет этого выполняя один или более процессов, включающих в себя один или более процессов, описанных в данном документе. Такие инструкции и другие данные могут сохраняться и передаваться с использованием множества компьютерно-читаемых носителей. Файл в вычислительном устройстве 105, в общем, представляет собой совокупность данных, сохраненных на компьютерно-читаемом носителе, к примеру, на носителе хранения данных, в оперативном запоминающем устройстве и т.д.
[23] Компьютерно-читаемый носитель включает в себя любой носитель, который участвует в предоставлении данных (например, инструкций), которые могут считываться посредством компьютера. Такой носитель может принимать множество форм, включающих в себя, но не только, энергонезависимые носители, энергозависимые носители и т.д. Энергонезависимые носители включают в себя, например, оптические или магнитные диски и другое постоянное запоминающее устройство. Энергозависимые носители включают в себя динамическое оперативное запоминающее устройство (DRAM), которое типично составляет основное запоминающее устройство. Общие формы компьютерно-читаемых носителей включают в себя, например, гибкий диск, дискету, жесткий диск, магнитную ленту, любой другой магнитный носитель, CD-ROM, DVD, любой другой оптический носитель, перфокарты, бумажную ленту, любую другую физическую среду с шаблонами отверстий, RAM, PROM, EPROM, флэш-EEPROM, любой другой кристалл или картридж запоминающего устройства либо любой другой носитель, с которого компьютер может выполнять считывание.
[24] Относительно носителей, процессов, систем, способов и т.д., описанных в данном документе, следует понимать, что хотя этапы таких процессов и т.д. описаны как осуществляемые согласно определенной упорядоченной последовательности, такие процессы могут осуществляться на практике с описанными этапами, выполняемыми в порядке, отличном от порядка, описанного в данном документе. Дополнительно следует понимать, что определенные этапы могут выполняться одновременно, что другие этапы могут добавляться, или что определенные этапы, описанные в данном документе, могут опускаться. Например, в процессе 200, один или более этапов могут опускаться, или этапы могут выполняться в порядке, отличном от порядка, показанного на фиг. 2. Другими словами, описания систем и/или процессов в данном документе предоставляются в целях иллюстрации конкретных вариантов осуществления и никоим образом не должны истолковываться так, чтобы ограничивать раскрытый предмет изобретения.
[25] Соответственно, следует понимать, что настоящее раскрытие, включающее в себя вышеприведенное описание и прилагаемые чертежи и нижеприведенную формулу изобретения, имеет намерение быть иллюстративным, а не ограничивающим. Множество вариантов осуществления и вариантов применения, отличных от предоставленных примеров, должны быть очевидными для специалистов в данной области техники после прочтения вышеприведенного описания. Объем изобретения должен определяться не со ссылкой на вышеприведенное описание, а должен вместо этого определяться со ссылкой на формулу изобретения, прилагаемую к настоящему документу и/или включенную в непредварительную заявку на патент на его основе, наряду с полным объемом эквивалентов, на которые уполномочена такая формула изобретения. Предполагается и подразумевается, что будущие разработки должны осуществляться в областях техники, поясненных в данном документе, и что раскрытые системы и способы должны быть включены в такие будущие варианты осуществления. В общем, следует понимать, что раскрытый предмет изобретения допускает модификацию и варьирование.
| название | год | авторы | номер документа |
|---|---|---|---|
| УЛУЧШЕННАЯ РАБОТА СЕНСОРНОГО ЭКРАНА | 2015 |
|
RU2696978C1 |
| СИСТЕМА И СПОСОБ ОБНАРУЖЕНИЯ ПРЕПЯТСТВИЙ | 2015 |
|
RU2706859C2 |
| УЛУЧШЕННОЕ ОПОВЕЩЕНИЕ СИСТЕМЫ ТРАНСПОРТНОГО СРЕДСТВА | 2015 |
|
RU2709210C2 |
| УЛУЧШЕННОЕ ПРЕДОТВРАЩЕНИЕ СТОЛКНОВЕНИЙ | 2015 |
|
RU2708534C2 |
| СИСТЕМА И СПОСОБ ДЛЯ УЛУЧШЕННОГО ПРЕОДОЛЕНИЯ ИЗГИБОВ | 2015 |
|
RU2711403C2 |
| ТАКТИЛЬНЫЙ ВЫВОД В ТРАНСПОРТНОМ СРЕДСТВЕ | 2015 |
|
RU2703680C1 |
| СИСТЕМА И СПОСОБ ДИСТАНЦИОННОГО НАБЛЮДЕНИЯ ЗА ТРАНСПОРТНЫМИ СРЕДСТВАМИ | 2014 |
|
RU2654502C2 |
| СИСТЕМА И СПОСОБ ДЛЯ ПРЕДУПРЕЖДЕНИЯ О ПРИБЛИЖЕНИИ ТРАНСПОРТНОГО СРЕДСТВА | 2015 |
|
RU2687395C2 |
| ОПРЕДЕЛЕНИЕ РАСПОЛОЖЕНИЯ ПОЛЬЗОВАТЕЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2016 |
|
RU2702243C2 |
| УЛУЧШЕННАЯ ДОСТАВКА СООБЩЕНИЙ | 2015 |
|
RU2739913C2 |
Изобретение относится к системам помощи при вождении. Система обнаружения поведения в пределах полосы движения содержит компьютер, включающий в себя процессор и запоминающее устройство. Запоминающее устройство сохраняет инструкции, выполняемые посредством компьютера для сбора данных о перемещении запястья занимающего место в транспортном средстве из носимого модуля сбора данных, определения значения обнаружения поведения в пределах полосы движения и приведения в действие механизма в носимом устройстве. Упомянутые данные указывают перемещение запястья при рулении и последующее перемещение транспортного средства в пределах полосы движения. Данные из модуля сбора данных на пользовательском устройстве собирают для определения изменения поперечного перемещения транспортного средства. Значение обнаружения поведения в пределах полосы движения является показателем перемещения запястья и изменения перемещения поперечной позиции пользовательского устройства. Механизм в носимом устройстве приводят в действие, когда значение обнаружения поведения в пределах полосы движения превышает пороговое значение. Достигается повышение безопасности управления транспортным средством. 2 н. и 18 з.п. ф-лы, 2 ил.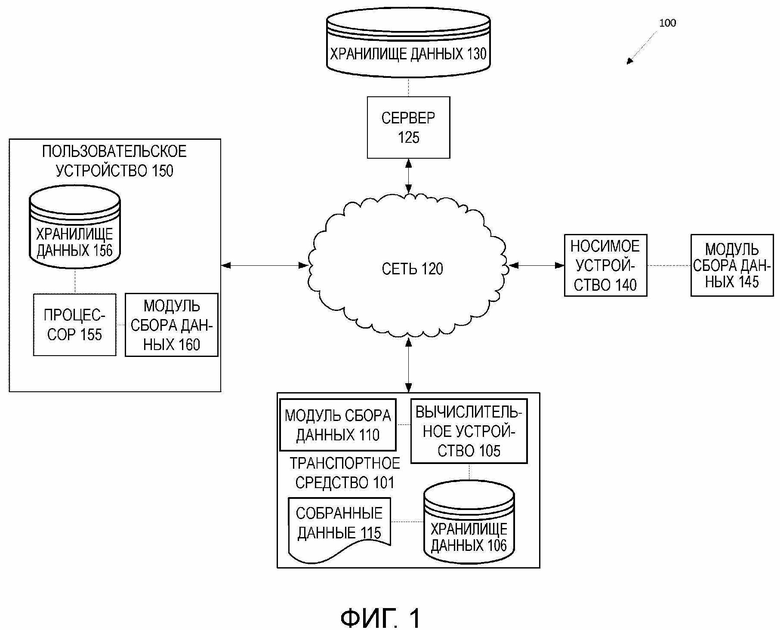
1. Система обнаружения поведения в пределах полосы движения, содержащая компьютер, включающий в себя процессор и запоминающее устройство, причем запоминающее устройство сохраняет инструкции, выполняемые посредством компьютера для того, чтобы:
- собирать данные о перемещении запястья занимающего место в транспортном средстве из носимого модуля сбора данных, причем упомянутые данные указывают перемещение запястья занимающего место в транспортном средстве при рулении и последующее перемещение транспортного средства в пределах полосы движения;
- собирать данные из модуля сбора данных на пользовательском устройстве, чтобы определять изменение поперечного перемещения транспортного средства;
- определять значение обнаружения поведения в пределах полосы движения, которое является показателем перемещения запястья занимающего место в транспортном средстве и изменения перемещения поперечной позиции пользовательского устройства; и
- приводить в действие механизм в носимом устройстве, когда значение обнаружения поведения в пределах полосы движения превышает пороговое значение.
2. Система по п. 1, в которой инструкции включают в себя инструкции для того, чтобы определять значение обнаружения поведения в пределах полосы движения, по меньшей мере, частично на основе перемещения руки занимающего место в транспортном средстве.
3. Система по п. 1, в которой механизм представляет собой механизм тактильного вывода.
4. Система по п. 1, в которой инструкции включают в себя инструкции для того, чтобы определять значение обнаружения поведения в пределах полосы движения в карманном пользовательском устройстве.
5. Система по п. 4, в которой инструкции включают в себя инструкции для того, чтобы определять значение обнаружения поведения в пределах полосы движения в карманном пользовательском устройстве и в носимом устройстве.
6. Система по п. 1, в которой инструкции включают в себя инструкции для того, чтобы определять значение обнаружения поведения в пределах полосы движения, по меньшей мере, частично на основе данных местоположения карманного пользовательского устройства.
7. Система по п. 1, дополнительно содержащая по меньшей мере одно из: акселерометра, гироскопа и глобальной системы позиционирования.
8. Система по п. 1, в которой носимое устройство включает в себя акселерометр.
9. Система по п. 1, в которой инструкции включают в себя инструкции для того, чтобы определять среднее значение обнаружения поведения в пределах полосы движения из набора предыдущих значений обнаружения поведения в пределах полосы движения.
10. Система по п. 9, в которой инструкции включают в себя инструкции для того, чтобы приводить в действие механизм, когда среднее значение обнаружения поведения в пределах полосы движения превышает пороговое значение.
11. Способ обнаружения поведения в пределах полосы движения, содержащий этапы, на которых:
- собирают данные о перемещении запястья занимающего место в транспортном средстве из носимого модуля сбора данных, причем упомянутые данные указывают перемещение запястья занимающего место в транспортном средстве при рулении и последующее перемещение транспортного средства в пределах полосы движения;
- собирают данные из модуля сбора данных на пользовательском устройстве, чтобы определять изменение поперечного перемещения транспортного средства;
- определяют значение обнаружения поведения в пределах полосы движения, которое является показателем перемещения запястья занимающего место в транспортном средстве и изменения перемещения поперечной позиции пользовательского устройства; и
- приводят в действие механизм в носимом устройстве, когда значение обнаружения поведения в пределах полосы движения превышает пороговое значение.
12. Способ по п. 11, дополнительно содержащий этап, на котором определяют значение обнаружения поведения в пределах полосы движения, по меньшей мере, частично на основе перемещения руки занимающего место в транспортном средстве.
13. Способ по п. 11, в котором механизм представляет собой механизм тактильного вывода.
14. Способ по п. 11, дополнительно содержащий этап, на котором определяют значение обнаружения поведения в пределах полосы движения в карманном пользовательском устройстве.
15. Способ по п. 14, дополнительно содержащий этап, на котором определяют значение обнаружения поведения в пределах полосы движения в карманном пользовательском устройстве и носимом устройстве.
16. Способ по п. 11, дополнительно содержащий этап, на котором определяют значение обнаружения поведения в пределах полосы движения, по меньшей мере, частично на основе данных местоположения карманного пользовательского устройства.
17. Способ по п. 11, дополнительно содержащий по меньшей мере одно из: акселерометра, гироскопа и глобальной системы позиционирования.
18. Способ по п. 11, в котором носимое устройство включает в себя акселерометр.
19. Способ по п. 11, дополнительно содержащий этап, на котором определяют среднее значение обнаружения поведения в пределах полосы движения из набора предыдущих значений обнаружения поведения в пределах полосы движения.
20. Способ по п. 19, дополнительно содержащий этап, на котором приводят в действие механизм, когда среднее значение обнаружения поведения в пределах полосы движения превышает пороговое значение.
| US 7692552 B2, 06.04.2010 | |||
| US 9135803 B1, 15.09.2015 | |||
| Способ получения пленки из полиэтилена и других пластиков | 1956 |
|
SU106589A1 |

