Изобретение относится к области прикладного телевидения, использующего регистрацию отраженного или излученного потока излучения в инфракрасном (ИК) диапазоне спектра.
Геометрический шум (ГШ) или в английской аббревиатуре FPN-шум (fixed pattern noise) является для конкретного фотоприемника детерминированной помехой, имеющей две составляющих: аддитивную и мультипликативную. Аддитивная составляющая обусловлена неравномерностью термогенерации носителей заряда в элементах матричного фотоприемника. Мультипликативная составляющая обусловлена неоднородностью чувствительности элементов матричного фотоприемника.
Математическая модель, описывающая сигнал с ГШ, представляет собой линейное уравнение с постоянными коэффициентами. В матричной форме записи эта модель имеет следующий вид: Y=KX+B, где Y - матрица выходных значений сигнала яркости матричного фотоприемника с ГШ, В - матрица аддитивной составляющей ГШ, характеризующая для каждого элемента неравномерность термогенерации, X - матрица значений сигнала яркости от элементов матричного фотоприемника без ГШ, а K - матрица коэффициентов, характеризующих неравномерность чувствительности для каждого из этих элемента. При этом KX - мультипликативная составляющая ГШ.
С ГШ обычно борются компенсационным методом, заключающимся в вычитании предварительно запомненных значений аддитивной составляющей В и умножением (или делением) на предварительно рассчитанные коэффициенты K компенсации мультипликативной составляющей.
Указанная выше математическая модель используется в известном способе компенсации ГШ, описанном, в частности, на с. 16-23 литературы Л.И. Хромов, Н.В. Лебедев, А.К. Цыцулин, А.Н. Куликов «Твердотельное телевидение. Телевизионные системы с переменными параметрами на ПЗС и микропроцессорах». М., «Радио и связь», 1986 г.
Данный способ предусматривает предварительную калибровку матричного фотоприемника видимого диапазона спектра, во время которой производят поочередное перекрытие потока излучения и равномерное облучение фотоприемника. Получаемые при этом значения в матрице сигнала яркости изображений Y1 для перекрытого потока излучения и Y2 для равномерно облученного фотоприемника запоминают. Затем рассчитывают для каждого элемента изображения коэффициенты K, характеризующие относительную чувствительность элементов фотоприемника по формуле K=Y2/m2, где m2 средняя яркость изображения Y2. При информативном облучении фотоприемника производят компенсацию ГШ в получаемых при этом цифровых значениях Y, формируя выходные значения яркости X по формуле X=(Y-B)/K, причем, B=Y1.
Недостатком данного способа является его низкая точность при работе в увеличенном динамическом диапазоне изменения сигнала.
Известен способ компенсации геометрического шума матричного фотоприемника, описанный на с. 3, 4 статьи авторов Брондз Д.С., Харитонова Е.Н., «Коррекция геометрического шума МФПУ с помощью аппроксимации методом наименьших квадратов передаточных характеристик матрицы полиномом Т-порядка» // Журнал радиоэлектроники, 2008, №11. С. 1-29.
Данный способ также основан на использовании рассмотренной выше математической модели ГШ. Однако, в отличие от рассмотренного первого способа, данный способ предусматривает нахождение коэффициентов K из системы уравнений: Y1=KX1+B и Y2=KX2+B. При этом Х1 и Х2 - исходные значения сигнала яркости от элементов матричного фотоприемника без ГШ при равномерном низком и высоком уровне облученности элементов фотоприемной матрицы, соответствующие средним значениям яркости m1 и m2 изображений Y1 и Y2. Из рассмотренной выше системы уравнений следует значения K=(Y2-Y1)/(m2-m1) для каждого элемента фотоприемника.
Таким образом, сущность данного способа заключается в предварительной калибровке матричного фотоприемника, выполняемой путем поочередного равномерного его облучения от источников с низким и высоким уровнем излучения. Получаемые при этом цифровые значения сигнала яркости кадров изображений Y1 для низкого и Y2 для высокого уровня облученности фотоприемника запоминают и рассчитывают средние значения яркости m1 и m2 для изображений Y1 и Y2, соответственно. Далее для каждого элемента матричного фотоприемника рассчитывают значения коэффициентов K по формуле K=(Y2-Y1)/(m2-m1). При информативном облучении фотоприемника производят компенсацию ГШ по формуле X=(Y-Y1)/K+m1. Добавление значения m1 при этом обеспечивает восстановление средней яркости изображения, теряемой при вычитании значений Y1. Данный способ в литературе известен, как двухточечная коррекция.
Недостатком данного способа является низкая точность компенсации ГШ фотоприемника при времени экспозиции (накопления), отличном от времени экспозиции, использованном в процессе калибровки. Низкая точность обусловлена тем, что, например, при увеличении времени t экспозиции фотоприемника в процессе его информативного облучения в пределах рабочего диапазона экспозиций tmin≤t≤tmax относительно минимального времени экспозиции tmin, использованного в процессе калибровки, возникает ошибка компенсации ГШ. Ошибка компенсации ГШ в свою очередь объясняется тем, что аддитивная составляющая ГШ прямо пропорциональна времени накопления. На изображении ошибка компенсации проявляется в виде помехи - зернистой структуры. При этом, чем больше задаваемое время накопления t, тем больше ошибка компенсации и заметнее помеха.
Наиболее близким по технической сущности к заявляемому способу является способ компенсации геометрического шума матричного фотоприемника (см. патент РФ №2679547, G06T 5/00, от 11.02.2019) - прототип.
Данный способ заключается в следующем. Производят предварительную калибровку фотоприемника путем поочередного равномерного облучения элементов фотоприемной матрицы от источника с низким уровнем и высоким уровнем излучения при времени экспозиции фотоприемника tmin. Полученные при этом значения сигнала яркости изображения Y1 для низкого и изображения Y2 для высокого уровня облучения запоминают в цифровой форме. Далее вычисляют средние значение m1 и m2 сигнала яркости изображений Y1 и Y2, соответственно, а также коэффициенты K для каждого элемента матричного фотоприемника по формуле K=(Y2-Y1)/(m2-m1) для времени экспозиции фотоприемника tmin. На этапе калибровки дополнительно задают максимальное время экспозиции tmax при низком уровне равномерной облученности фотоприемника. Получаемые при этом значения сигнала яркости изображения Ymax запоминают в цифровой форме и вычисляют их среднее значение mmax.
Затем на этапе калибровки осуществляют преобразования полученных изображений Y2, Y1 и Ymax по формулам X1=(Y2-Y1)K+m1 и X2=(Y2-Ymax)K+mmax, соответствующим способу двухточечной коррекции, и запоминают полученные значения сигнала яркости кадров изображений Х1 и Х2. Полученные кадры изображения содержат остаточный ГШ, получаемый после указанных выше преобразований сигнала яркости изображения Y2 при времени экспозиции tmin и tmax, соответственно.
Непосредственно перед информативной засветкой вычисляют коэффициент a=(t-tmin)/(tmax-tmin) для заданного в пределах tmin≤t≤tmax времени t экспозиции фотоприемника и формируют корректирующий кадр изображения Y0 по формуле  , а также определяют его среднюю яркость m0.
, а также определяют его среднюю яркость m0.
Непосредственно при информативном облучении фотоприемника, получая изображение Y с установленным временем экспозиции t, производят двухточечную коррекцию по формуле X=(Y-Y1)K+ml с использованием отсчетов яркости Y1 и коэффициентов K, вычисленных на этапе калибровки для времени экспозиции tmin. Далее окончательно выходное изображение Х0 формируют в соответствии с выражениями X0=X-Y0+m0, если t≠tmin и Х0=Х, если t=tmin.
Таким образом, сущность способа-прототипа заключается в том, что вычисляются значения сигнала яркости интерполированного корректирующего кадра изображения Y0 для времени экспозиции t. При информативной засветке значения Y0 вычитаются из значений яркости соответствующих элементов выходного кадра X, формируемого по коэффициентам K, рассчитанным на этапе калибровки при времени экспозиции tmin.
Недостатком данного способа является то, что при реализации способа вычисления в процессе компенсации ГШ требуют увеличенного объема памяти для хранения эталонных изображений и коэффициентов компенсации. В частности, требуется память для хранения эталонных изображений Х1, Х2, Y1 и матрицы коэффициентов компенсации K.
Задачей изобретения является уменьшение при реализации способа объема памяти, требуемой для хранения эталонных изображений и коэффициентов компенсации, получаемых в процессе калибровки.
Технический результат - уменьшение при реализации способа аппаратных затрат на требуемый объем памяти для хранения эталонных изображений и коэффициентов компенсации, получаемых в процессе калибровки.
Поставленная задача достигается тем, что в способе компенсации геометрического шума матричного фотоприемника, включающем его предварительную калибровку при минимальном времени экспозиции фотоприемника tmin путем поочередного равномерного облучения элементов фотоприемной матрицы от источника с низким и высоким уровнем излучения, запоминание в цифровой форме значений яркости элементов изображений Y1 и Y2, для низкого и для высокого уровня облучения, соответственно, вычисление средних значений m1 и m2 яркости элементов в изображениях Y1 и Y2, задание на этапе калибровки максимального времени экспозиции tmax при низком уровне равномерной облученности фотоприемника и запоминание в цифровой форме получаемых при этом значений яркости элементов изображения Ymax, вычисление непосредственно перед информативной засветкой коэффициента a=(t-tmin)/(tmax-tmin) для устанавливаемого времени t экспозиции фотоприемника в пределах tmin≤t≤tmax, вычисление значений яркости элементов эталонного изображения Y0 по формуле  и его средней яркости m0, расчет значений коэффициентов компенсации K по формуле K=(Y2-Y1)/(m2-m1), получение в процессе информативного облучения, значений яркости элементов изображения Y и формирование выходных цифровых значений яркости X по формуле X=(Y-Y1)/K+m1, значения яркости элементов эталонного изображения Y0, и значения коэффициентов K вычисляют при информативном облучении, причем, при вычислении Y0 принимают X2=Ymax, X1=Y1, а при вычислении коэффициентов компенсации K и выходных цифровых значений яркости X принимают Y1=Y0, а m1=m0, где m0 - средняя яркость Y0, вычисляемая непосредственно перед информативной засветкой по формуле
и его средней яркости m0, расчет значений коэффициентов компенсации K по формуле K=(Y2-Y1)/(m2-m1), получение в процессе информативного облучения, значений яркости элементов изображения Y и формирование выходных цифровых значений яркости X по формуле X=(Y-Y1)/K+m1, значения яркости элементов эталонного изображения Y0, и значения коэффициентов K вычисляют при информативном облучении, причем, при вычислении Y0 принимают X2=Ymax, X1=Y1, а при вычислении коэффициентов компенсации K и выходных цифровых значений яркости X принимают Y1=Y0, а m1=m0, где m0 - средняя яркость Y0, вычисляемая непосредственно перед информативной засветкой по формуле  ,
,
Иными словами, при информативной засветке вычисления производят по общей формуле:  что позволяет уменьшить объем памяти, требуемой для хранения эталонных изображений и значений коэффициентов компенсации.
что позволяет уменьшить объем памяти, требуемой для хранения эталонных изображений и значений коэффициентов компенсации.
Действительно, в заявляемом способе для выполнения калибровки фотоприемника требуется объем памяти для хранения только трех изображений: Y1, Y2 и Ymax, в то время, как по способу-прототипу выполнение калибровки требует объема памяти для хранения трех изображений: Х2, X1, Y1 и дополнительный объем памяти для хранения значений коэффициентов компенсации K, а также значений яркости элементов кадра интерполированного корректирующего изображения Y0.
Технические решения, содержащие совокупность признаков, идентичную признакам изобретения, не выявлены, что определяет соответствие изобретения критерию «новизна».
Заявителем не выявлены какие-либо источники информации, содержащие сведения о влиянии отличительных признаков на достигаемый результат, что свидетельствует о соответствии изобретения критерию «изобретательский уровень».
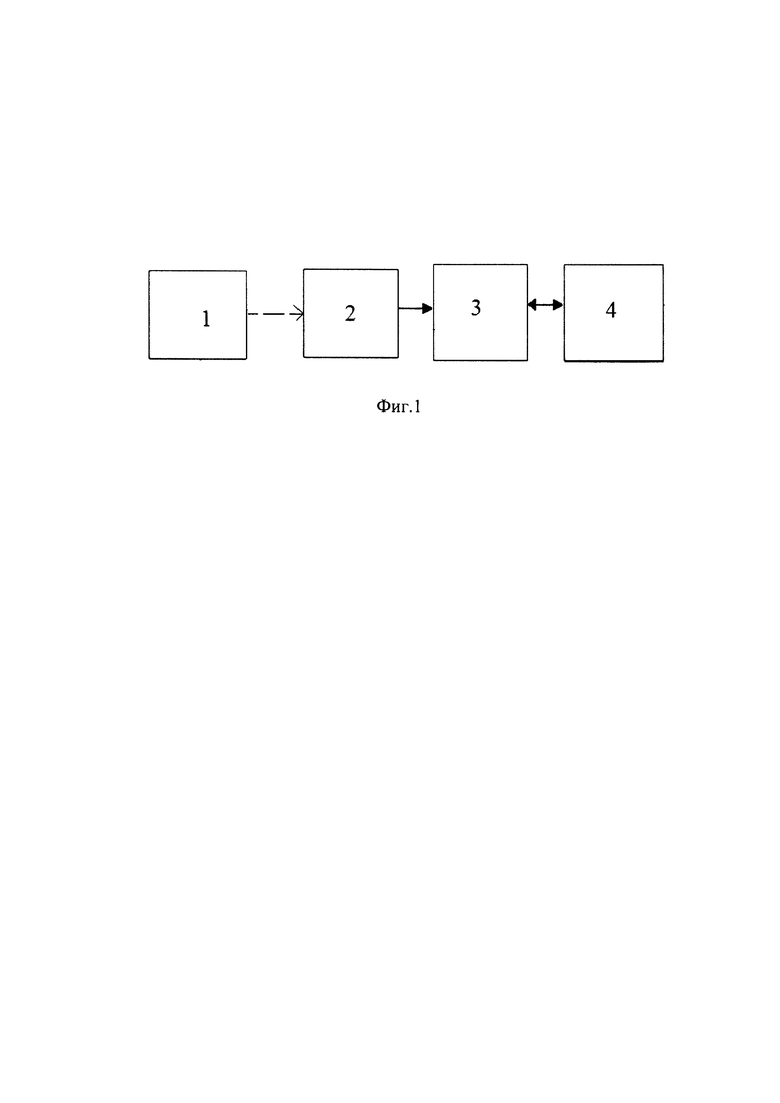
На фиг. 1 приведен пример структурной схемы устройства для реализации заявляемого способа, где:
1 - объектив;
2 - инфракрасная камера (ИК-камера);
3 - устройство видеозаписи;
4 - компьютер.
Изображения для низкого и высокого уровня облучения фотоприемников в процессе калибровки фотоприемника могут быть получены, например, путем последовательной съемки матричной ИК-камерой изображений излучателя по модели абсолютно черного тела (АЧТ) при его низкой и высокой температуре. Фиксация изображений в компьютере может осуществляться через стандартное устройство видеозаписи, например, типа Aver EZ Capture фирмы Aver Media, подключаемое к PCI- шине компьютера. Результирующее изображение может быть получено, например, путем программирования в среде стандартного пакета MATLAB или путем создания специализированной программы, например, в среде С++.
Устройство содержит объектив 1, оптически связанный с матричной ИК-камерой 2, последовательно подключенной к устройству 3 видеозаписи и компьютеру 4.
Способ осуществляется следующим образом.
Поток излучения, проходит через объектив 1 на фотоприемник ИК-камеры 2. Время экспозиции t в пределах tmin≤t≤tmax задается в ИК-камере. Значения t, tmin, tmax и вводятся в компьютер в ручном режиме. Калибровка камеры осуществляется при t=tmin. Получаемые в процессе калибровки изображения Y1 для tmin„ Ymax для tmax при низкой и Y2 для tmin при высокой температуре АЧТ последовательно преобразуются ИК-камерой 2 в электрический сигнал, который в свою очередь преобразуется в цифровую форму стандартным устройством 3 видеозаписи и последовательно вводится в компьютер 4.
Введенные в компьютер исходные цифровые значения яркости элементов изображений Y1, Y2, Ymax, а также значения t, tmin и tmax обрабатываются программным путем с целью вычислении средних значений m1, m2 яркости элементов в кадрах изображений Y1, Y2 и получения значений коэффициентов а по формуле: a=(t-tmin)/(tmax-tmin) и интерполированного значения средней яркости по формуле  .
.
При информативном облучении с временем экспозиции t в компьютер вводится изображение со значениями яркости элементов Y, которые обрабатываются программным путем с целью формирования выходных цифровых значений яркости X по общей формуле:
 .
.
Выходные цифровые значения яркости элементов откорректированного изображения X отображаются на экране дисплея компьютера.
Таким образом, для реализации данного способа могут быть применены известные материалы и технические средства, что обуславливает соответствие изобретения критерию «промышленная применимость».
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ компенсации геометрического шума матричного фотоприемника, инвариантный к времени экспозиции | 2023 |
|
RU2817046C1 |
| СПОСОБ КОМПЕНСАЦИИ ГЕОМЕТРИЧЕСКОГО ШУМА МАТРИЧНОГО ФОТОПРИЕМНИКА | 2018 |
|
RU2679547C1 |
| Способ компенсации геометрического шума в видеопоследовательности инфракрасных изображений, основанный на анализе наблюдаемой сцены | 2020 |
|
RU2744483C1 |
| ПРЕОБРАЗОВАНИЕ ТОНОВОЙ КРИВОЙ ДЛЯ ИЗОБРАЖЕНИЙ С РАСШИРЕННЫМ ДИНАМИЧЕСКИМ ДИАПАЗОНОМ | 2018 |
|
RU2713869C1 |
| СПОСОБ ИЗМЕРЕНИЯ ЛИНЕЙНОГО СМЕЩЕНИЯ ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2456542C2 |
| СПОСОБ ОБНАРУЖЕНИЯ АНОМАЛЬНЫХ ИЗМЕРЕНИЙ БЕЗ ОЦЕНКИ ФУНКЦИИ ТРЕНДА И УСТРОЙСТВО, ЕГО РЕАЛИЗУЮЩЕЕ | 2005 |
|
RU2302655C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ВРЕМЕНЕМ ЭКСПОЗИЦИИ, КОЭФФИЦИЕНТАМИ УСИЛЕНИЯ И ЦВЕТОВЫМ БАЛАНСОМ В МАТРИЧНЫХ ФОТОПРИЕМНИКАХ (ВАРИАНТЫ) | 2006 |
|
RU2333614C1 |
| Способ компенсации неравномерности видеосигнала матричного фотоприемника | 1982 |
|
SU1117858A1 |
| ЛАЗЕРНЫЙ ТОЛЩИНОМЕР И СПОСОБ ЕГО КАЛИБРОВКИ | 2013 |
|
RU2542633C1 |
| СПОСОБ ИЗМЕРЕНИЯ КОМПОНЕНТОВ СЛОЖНЫХ ПЕРЕМЕЩЕНИЙ ОБЪЕКТА | 2006 |
|
RU2315948C1 |
Изобретение относится к вычислительной технике. Технический результат заключается в уменьшении аппаратных затрат на требуемый объем памяти для хранения эталонных изображений и коэффициентов компенсации, получаемых в процессе калибровки. Способ включает предварительную калибровку геометрического шума при минимальном времени экспозиции фотоприемника tmin путем поочередного равномерного облучения элементов фотоприемной матрицы от источника с низким и высоким уровнем излучения, запоминание в цифровой форме значений яркости элементов изображений Y1 и Y2 для низкого и для высокого уровня облучения, соответственно, вычисление среднего значения m1 и m2 яркости элементов изображений Y1 и Y2, соответственно, задание на этапе калибровки максимального времени экспозиции tmax при низком уровне равномерной облученности фотоприемника и запоминание в цифровой форме получаемых при этом значений яркости элементов изображения Ymax, вычисление непосредственно перед информативной засветкой коэффициента a=(t-tmin)/(tmax-tmin) для устанавливаемого времени t экспозиции фотоприемника в пределах tmin≤t≤tmax, вычисление значений яркости элементов эталонного изображения Y0 по формуле  и его средней яркости
и его средней яркости  , расчет значений коэффициентов компенсации K по формуле K=(Y2-Y1)/(m2-m1), получение в процессе информативного облучения значений яркости элементов изображения Y и формирование выходных цифровых значений яркости X по формуле X=(Y-Y1)/K+m0. Значения яркости элементов эталонного изображения Y0 и значения коэффициентов K вычисляют непосредственно при информативном облучении. Для вычисления Y0 принимают X2=Ymax, X1=Y1, а для вычисления коэффициентов компенсации K и выходных цифровых значений яркости X принимают Y1=Y0, m1=m0. Формирование выходных цифровых значений яркости X производят в процессе информативной засветки по общей формуле:
, расчет значений коэффициентов компенсации K по формуле K=(Y2-Y1)/(m2-m1), получение в процессе информативного облучения значений яркости элементов изображения Y и формирование выходных цифровых значений яркости X по формуле X=(Y-Y1)/K+m0. Значения яркости элементов эталонного изображения Y0 и значения коэффициентов K вычисляют непосредственно при информативном облучении. Для вычисления Y0 принимают X2=Ymax, X1=Y1, а для вычисления коэффициентов компенсации K и выходных цифровых значений яркости X принимают Y1=Y0, m1=m0. Формирование выходных цифровых значений яркости X производят в процессе информативной засветки по общей формуле:  . 1 з.п. ф-лы, 1 ил.
. 1 з.п. ф-лы, 1 ил.
1. Способ компенсации геометрического шума матричного фотоприемника, включающий его предварительную калибровку при минимальном времени экспозиции фотоприемника tmin путем поочередного равномерного облучения элементов фотоприемной матрицы от источника с низким и высоким уровнем излучения, запоминание в цифровой форме значений яркости элементов изображений Y1 и Y2 для низкого и для высокого уровня облучения, соответственно, вычисление среднего значения m1 и m2 яркости элементов изображений Y1 и Y2, соответственно, задание на этапе калибровки максимального времени экспозиции tmax при низком уровне равномерной облученности фотоприемника и запоминание в цифровой форме получаемых при этом значений яркости элементов изображения Ymax, вычисление непосредственно перед информативной засветкой коэффициента a=(t-tmin)/(tmax-tmin) для устанавливаемого времени t экспозиции фотоприемника в пределах tmin≤t≤tmax, вычисление значений яркости элементов эталонного изображения Y0 по формуле  и его средней яркости
и его средней яркости  , расчет значений коэффициентов компенсации K по формуле K=(Y2-Y1)/(m2-m1), получение в процессе информативного облучения значений яркости элементов изображения Y и формирование выходных цифровых значений яркости X по формуле X=(Y-Y1)/K+m0, отличающийся тем, что значения яркости элементов эталонного изображения Y0 и значения коэффициентов K вычисляют непосредственно при информативном облучении, причем для вычисления Y0 принимают X2=Ymax, X1=Y1, а для вычисления коэффициентов компенсации K и выходных цифровых значений яркости X принимают Y1=Y0, m1=m0.
, расчет значений коэффициентов компенсации K по формуле K=(Y2-Y1)/(m2-m1), получение в процессе информативного облучения значений яркости элементов изображения Y и формирование выходных цифровых значений яркости X по формуле X=(Y-Y1)/K+m0, отличающийся тем, что значения яркости элементов эталонного изображения Y0 и значения коэффициентов K вычисляют непосредственно при информативном облучении, причем для вычисления Y0 принимают X2=Ymax, X1=Y1, а для вычисления коэффициентов компенсации K и выходных цифровых значений яркости X принимают Y1=Y0, m1=m0.
2. Способ по п. 1, отличающийся тем, что формирование выходных цифровых значений яркости X производят в процессе информативной засветки по общей формуле:  .
.
| СПОСОБ КОМПЕНСАЦИИ ГЕОМЕТРИЧЕСКОГО ШУМА МАТРИЧНОГО ФОТОПРИЕМНИКА | 2018 |
|
RU2679547C1 |
| СПОСОБ КОМПЕНСАЦИИ НЕОДНОРОДНОСТИ СИГНАЛА ФОТОЧУВСТВИТЕЛЬНЫХ ЭЛЕМЕНТОВ МНОГОЭЛЕМЕНТНОГО ФОТОПРИЕМНИКА | 2010 |
|
RU2449491C1 |
| СПОСОБ ЭЛЕКТРОННОЙ ОБРАБОТКИ СИГНАЛОВ ФОТОПРИЕМНИКА ПРИ ФОРМИРОВАНИИ ИЗОБРАЖЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2423016C1 |
| Способ защиты переносных электрических установок от опасностей, связанных с заземлением одной из фаз | 1924 |
|
SU2014A1 |
| Изложница с суживающимся книзу сечением и с вертикально перемещающимся днищем | 1924 |
|
SU2012A1 |

