Изобретение относится к области прикладного телевидения, использующего регистрацию отраженного или излученного потока излучения в инфракрасном (ИК) диапазоне спектра.
Геометрический шум (ГШ) или в английской аббревиатуре FPN-шум (fixedpatternnoise) является для конкретного фотоприемника детерминированной помехой, имеющей две составляющих: аддитивную и мультипликативную. Аддитивная составляющая обусловлена неравномерностью термогенерации носителей заряда в элементах матричного фотоприемника. Мультипликативная составляющая обусловлена неоднородностью чувствительности элементов матричного фотоприемника. Математическая модель, описывающая ГШ, имеет вид линейного уравнения с постоянными коэффициентами: y=kx+b, где y - выходные значения яркости элементов матричного фотоприемника с ГШ, b - аддитивная составляющая ГШ, характеризующая для каждого элемента неравномерность термогенерации, kx - мультипликативная составляющая ГШ. При этом x - исходные значения яркости элементов матричного фотоприемника без ГШ, а k - коэффициенты, характеризующие неравномерность чувствительности для каждого элемента.
С ГШ обычно борются компенсационными методами, заключающимися в вычитании предварительно запомненных значений аддитивной составляющей b и умножением (или делением) на предварительно рассчитанные коэффициенты k компенсации мультипликативной составляющей.
Указанная выше математическая модель используется в известном способе компенсации ГШ, описанном, в частности, на с. 16-23 литературы Л.И. Хромов, Н.В. Лебедев, А.К. Цыцулин, А.Н. Куликов «Твердотельное телевидение. Телевизионные системы с переменными параметрами на ПЗС и микропроцессорах». М., «Радио и связь», 1986 г. Данный способ предусматривает предварительную калибровку матричного фотоприемника, заключающуюся в поочередном равномерном его облучении от источников с низким и высоким уровнем излучения. Получаемые при этом значения яркости элементов кадров изображений y1 для низкого и y2 для высокого уровня облученности фотоприемника запоминают. Затем рассчитывают коэффициенты k, характеризующие относительную чувствительность элементов фотоприемника по формуле k=y2/m2, где m2 средняя яркость изображения y2. При информативном облучении фотоприемника производят компенсацию ГШ в получаемых при этом цифровых значениях y яркости элементов кадра, формируя выходные значения яркости x элементов кадра по обратному выражению математической модели ГШ х=(y-b)/k, причем, b=y1. Недостатком данного способа является низкая точность при работе в увеличенном динамическом диапазоне изменения сигнала.
В качестве наиболее близкого аналога изобретения принят способ компенсации геометрического шума матричного фотоприемника, описанный на с. 3, 4 статьи авторов Д.С. Брондз, Е.Н. Харитонова, «Коррекция геометрического шума МФПУ с помощью аппроксимации методом наименьших квадратов передаточных характеристик матрицы полиномом Т-порядка» // Журнал радиоэлектроники, 2008, №11. Данный способ также основан на использовании рассмотренной выше математической модели ГШ. По данному способу предусматривается нахождение коэффициентов к из системы уравнений с двумя неизвестными: y1=kx1+b и у2=kx2+b. При этом x1=m1 и x2=m2 - исходные значения яркости элементов матричного фотоприемника без ГШ при равномерном низком и высоком уровне облученности элементов фотоприемной матрицы, соответствующие средним значениям яркости m1 и m2 изображений y1 и y2. Из рассмотренной выше системы уравнений следует значение k=(y2-y1)/(m2-m1).
Суть компенсации ГШ по известному способу сводиться к следующему. Проводится предварительная калибровка матричного фотоприемника, выполняемая путем поочередного равномерного его облучения от источников с низким и высоким уровнем излучения. Получаемые при этом цифровые значения яркости элементов кадров изображений y1 для низкого и y2 для высокого уровня облученности фотоприемника запоминают и рассчитывают средние значения яркости m1 и m2 для изображений y1 и y2, соответственно. Далее для каждого элемента матричного фотоприемника рассчитывают значения коэффициентов k по формуле k=(y2-y1)/m2-m1). При информативном облучении фотоприемника производят компенсацию ГШ в получаемых при этом цифровых значениях y яркости элементов кадра, вычисляя выходные цифровые значения x яркости элементов кадра изображения по формуле x=(y-y1)/k+m1.
Недостатком данного способа является низкая точность компенсации ГШ фотоприемника при времени экспозиции (накопления), отличном от времени экспозиции, использованном в процессе калибровки. Низкая точность обусловлена тем, что, например, при увеличении времени t экспозиции фотоприемника в процессе его информативного облучения в пределах рабочего диапазона экспозиций tмин≤t≤tмакс относительно минимального времени экспозиции tмин, использованного в процессе калибровки, возникает ошибка компенсации ГШ. Ошибка компенсации ГШ в свою очередь объясняется тем, что аддитивная составляющая ГШ прямо пропорциональна времени накопления. На изображении (б) ошибка компенсации проявляется в виде помехи - зернистой структуры. При этом, чем больше задаваемое время накопления t, тем больше ошибка компенсации и заметнее помеха.
Задачей предлагаемого технического решения является повышение точности компенсации геометрического шума матричного фотоприемника.
Технический результат заявляемого технического решения выражен в повышении точности компенсации ГШ при изменении времени экспозиции в процессе информативного облучения матричного фотоприемника.
Технический результат достигается тем, что в отличие от известного способа компенсации геометрического шума матричного фотоприемника, включающего предварительную его калибровку путем поочередного равномерного облучения элементов фотоприемной матрицы от источника с низким уровнем и высоким уровнем излучения, запоминании в цифровой форме значений яркости элементов кадра изображения y1 для низкого и элементов кадра изображения y2 для высокого уровня облучения, вычислении средних значений m1 и m2 яркости элементов в кадрах изображений y1 и y2, соответственно, вычислении для каждого элемента кадра коэффициентов по формуле

и формировании при информативном облучении из получаемых в цифровой форме значений яркости y элементов кадра изображения цифровых значений яркости выходного изображения x в соответствии с выражением

согласно изобретению для повышения точности, в процессе калибровки запоминают цифровые значения яркости элементов кадра изображения y1 при минимальном времени экспозиции фотоприемника tмин. Задают максимальное время экспозиции tмакс при низком уровне равномерной облученности фотоприемника и запоминают в цифровой форме получаемые при этом значения яркости элементов кадра изображения yмакс. Вычисляют их среднее значение. Осуществляют преобразования и запоминают полученные значения яркости элементов кадров изображений x2 и x1. Вычисляют коэффициент а для устанавливаемого времени t экспозиции фотоприемника в пределах tмин≤t≤tмакс, вычисляют значения яркости элементов эталонного кадра изображения y0 и определяют их среднюю яркость m0, а при информативном облучении фотоприемника с установленным временем экспозиции t. Формируют выходное изображение X и анализируют его.
Для достижения указанного выше технического результата предложен способ компенсации геометрического шума матричного фотоприемника, включающий предварительную его калибровку путем поочередного равномерного облучения элементов фотоприемной матрицы от источника с низким и высоким уровнем излучения, запоминании в цифровой форме значений яркости элементов кадров изображений y1 и y2, для низкого и для высокого уровня облучения, соответственно, вычислении средних значений m1 и m2 яркости элементов в кадрах изображений y1 и y2, соответственно, вычислении для каждого элемента кадра коэффициентов k по формуле
и получении в цифровой форме значений яркости элементов кадра изображения y в процессе информативного облучения и формировании цифровых значений яркости выходного изображения x в соответствии с выражением
в котором с целью повышения точности цифровые значения яркости элементов кадра изображения y1 в процессе калибровки запоминают при минимальном времени экспозиции фотоприемника tмин, задают максимальное время экспозиции tмакс при низком уровне равномерной облученности фотоприемника и запоминают в цифровой форме получаемые при этом значения яркости элементов кадра изображения yмакс, вычисляют их среднее значение, осуществляют преобразования по формулам


Запоминают полученные значения яркости элементов кадров изображений x2 и x1. Вычисляют коэффициентапо формуле для устанавливаемого времени t экспозиции фотоприемника в пределах tмин≤t≤tмакс

Вычисляют значения яркости элементов эталонного кадра изображения y0 по формуле

и определяют их среднюю яркость m0, а при информативном облучении фотоприемника с установленным временем экспозиции t формируют выходное изображение X в соответствии с выражениями X=x-y0+m0, если t≠tмин и X=x, если t=tмин.
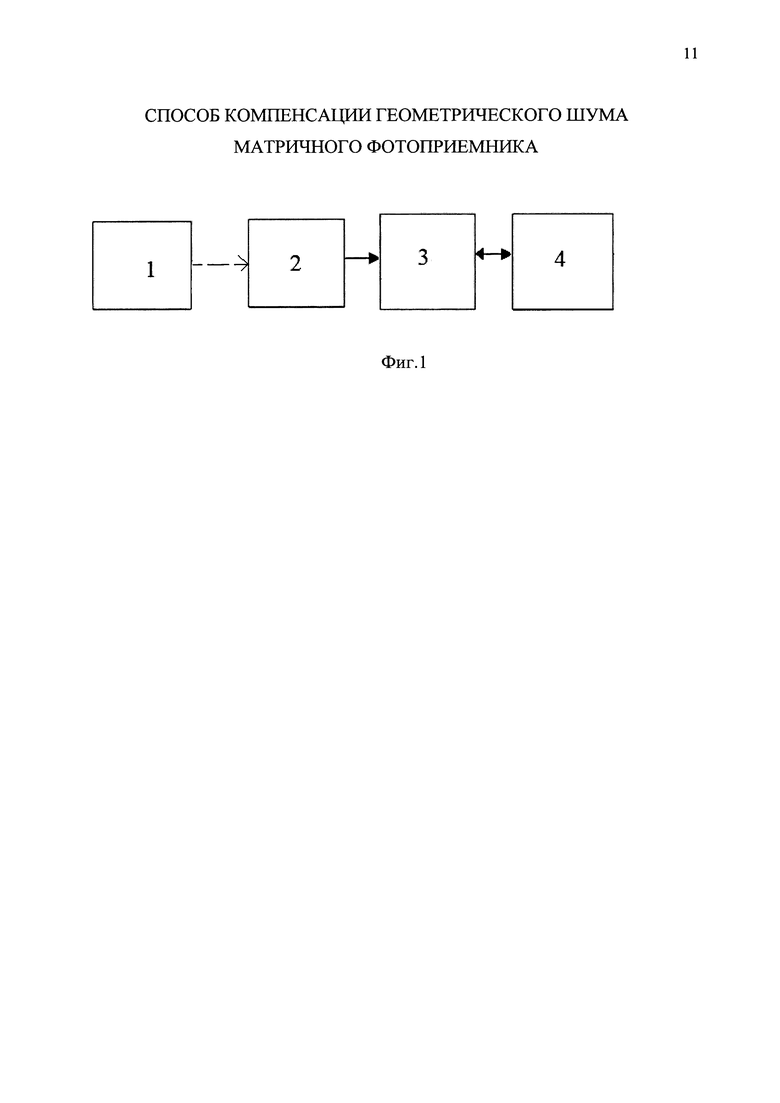
Структурная схема системы, реализующая предлагаемый способ компенсации геометрического шума матричного фотоприемника представлена на фиг. 1.
Позиции:
1 - объектив;
2 - инфракрасная камера (ИК-камера);
3 - устройство видеозаписи;
4 - компьютер.
Объектив 1, оптически связан с матричной ИК-камерой 2, последовательно подключенной к устройству видеозаписи 3 и компьютеру 4.
Способ осуществляется следующим образом.
Поток излучения проходит через объектив 1 и попадает на фотоприемник ИК-камеры 2. Время экспозиции t задается в ИК-камере 2 в пределах tмин≤t≤tмакс. Значения t, tмин,, tмакс вводятся в компьютер 4 в ручном режиме. Калибровка камеры осуществляется при t=tмин. Получаемые при калибровке изображения y1, умакс при низкой температуре абсолютно черного тела (АЧТ) и y2, при высокой температуре АЧТ последовательно преобразуются ИК-камерой 2 в электрический сигнал, который в свою очередь преобразуется в цифровую форму устройством видеозаписи 3 и последовательно передается на компьютер 4. Переданные в компьютер 4 исходные цифровые значения яркости элементов изображений y1, y2, yмакс, а также значения t, tмин и tмакс обрабатываются программным путем с целью вычислении средних значений m1, m2 и mмакс яркости элементов в кадрах изображений y1, y2 и yмакс, преобразования по формулам x1=(y2-y1)k+m1 и x2=(y2-yмакс)k+mмакс а также получения значений коэффициентов а по формуле: a=(t-tмин)/(tмакс-tмин). Затем программным путем вычисляются значения яркости элементов y0 эталонного изображения по формуле: y0=ах2+(1-а)х1 и определяется их средняя яркость m0. При информативном облучении с временем экспозиции t в компьютер 4 вводится изображение со значениями яркости элементов y, которые обрабатываются программным путем с целью формирования выходных цифровых значений яркости элементов изображения X в соответствии с выражениями X=x-y0+m0, если t≠tмин и X=x, если t=tмин.
Выходные цифровые значения яркости элементов изображения X отображаются на экране дисплея компьютера 4.
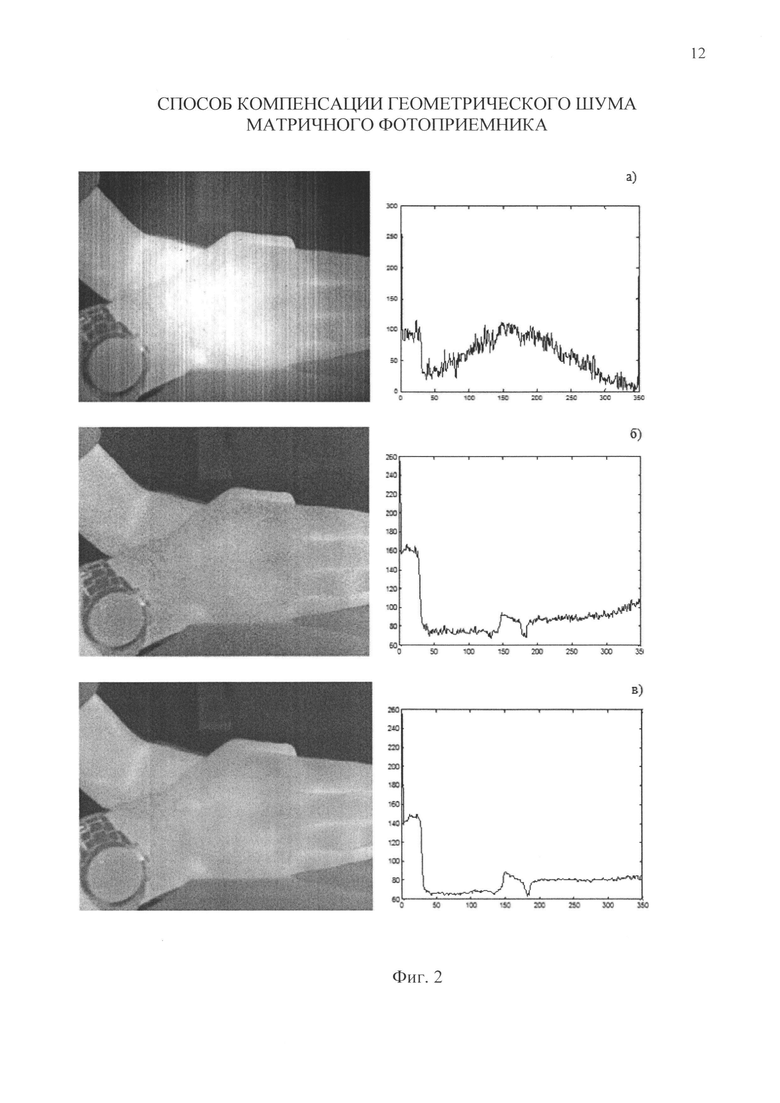
На фиг. 2 представлено исходное, содержащее ГШ (a), и результирующие изображения, полученные по способу-аналогу (б) и по заявляемому способу (в) при времени экспозиции tмин=3 мс в процессе калибровки фотоприемника и времени экспозиции t=6 мс в процессе информативного облучения. В изображении, полученном по способу-аналогу (б), видна помеха в виде зернистой структуры. В изображении, полученном по заявляемому способу (в), зернистость значительно уменьшена. Справа от изображений представлены соответствующие им осциллограммы строк с одинаковыми номерами, иллюстрирующие существенное снижение помехи при реализации заявляемого способа по сравнению со способом-прототипом.
Изображения для низкого и высокого уровня облучения фотоприемников в процессе калибровки фотоприемника могут быть получены, например, путем последовательной съемки матричной ИК-камерой изображений излучателя по модели АЧТ при его низкой и высокой температуре. Фиксация изображений в компьютере может осуществляться через стандартное устройство видеозаписи, например, типа AverEZCapture фирмы AverMedia, подключаемое к PCI- шине компьютера. Результирующее изображение может быть получено, например, путем программирования в среде стандартного пакета MATLAB или путем создания специализированной программы, например, в среде С++.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ компенсации геометрического шума матричного фотоприемника | 2019 |
|
RU2711723C1 |
| Способ компенсации геометрического шума матричного фотоприемника, инвариантный к времени экспозиции | 2023 |
|
RU2817046C1 |
| Способ компенсации геометрического шума в видеопоследовательности инфракрасных изображений, основанный на анализе наблюдаемой сцены | 2020 |
|
RU2744483C1 |
| СПОСОБ ИЗМЕРЕНИЯ ЛИНЕЙНОГО СМЕЩЕНИЯ ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2456542C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ВРЕМЕНЕМ ЭКСПОЗИЦИИ, КОЭФФИЦИЕНТАМИ УСИЛЕНИЯ И ЦВЕТОВЫМ БАЛАНСОМ В МАТРИЧНЫХ ФОТОПРИЕМНИКАХ (ВАРИАНТЫ) | 2006 |
|
RU2333614C1 |
| Многозональное сканирующее устройство с матричным фотоприёмным устройством | 2016 |
|
RU2654300C1 |
| Способ компенсации неравномерности видеосигнала матричного фотоприемника | 1982 |
|
SU1117858A1 |
| СПОСОБ ОРИЕНТАЦИИ СИСТЕМ КООРДИНАТ НАБЛЮДАТЕЛЕЙ В ПАССИВНОЙ СИСТЕМЕ ВИДЕНИЯ | 2018 |
|
RU2682382C1 |
| Способ измерения дальности от маневрового тепловоза до вагона на прямолинейном участке железнодорожного пути | 2020 |
|
RU2750364C1 |
| СПОСОБ КАЛИБРОВКИ ПЕРЕДАТОЧНОЙ ХАРАКТЕРИСТИКИ ЦИФРОАНАЛОГОВОГО ПРЕОБРАЗОВАТЕЛЯ | 1991 |
|
RU2022464C1 |
Изобретение относится к области прикладного телевидения. Технический результат - повышение точности компенсации геометрического шума матричного фотоприемника при изменении времени его экспозиции в процессе информативного облучения. Способ компенсации геометрического шума матричного фотоприемника заключается в предварительной его калибровке путем поочередного равномерного облучения элементов фотоприемной матрицы от источника с низким и высоким уровнем излучения, при этом цифровые значения яркости элементов кадра изображения в процессе калибровки запоминают при минимальном времени экспозиции фотоприемника, задают максимальное время экспозиции при низком уровне равномерной облученности фотоприемника и запоминают в цифровой форме получаемые при этом значения яркости элементов кадра изображения, вычисляют их среднее значение, осуществляют преобразования и запоминают полученные значения яркости, вычисляют коэффициент для устанавливаемого времени t экспозиции фотоприемника, вычисляют значения яркости элементов эталонного кадра изображения и определяют их среднюю яркость, а при информативном облучении фотоприемника с установленным временем экспозиции t формируют выходное изображение. 2 ил.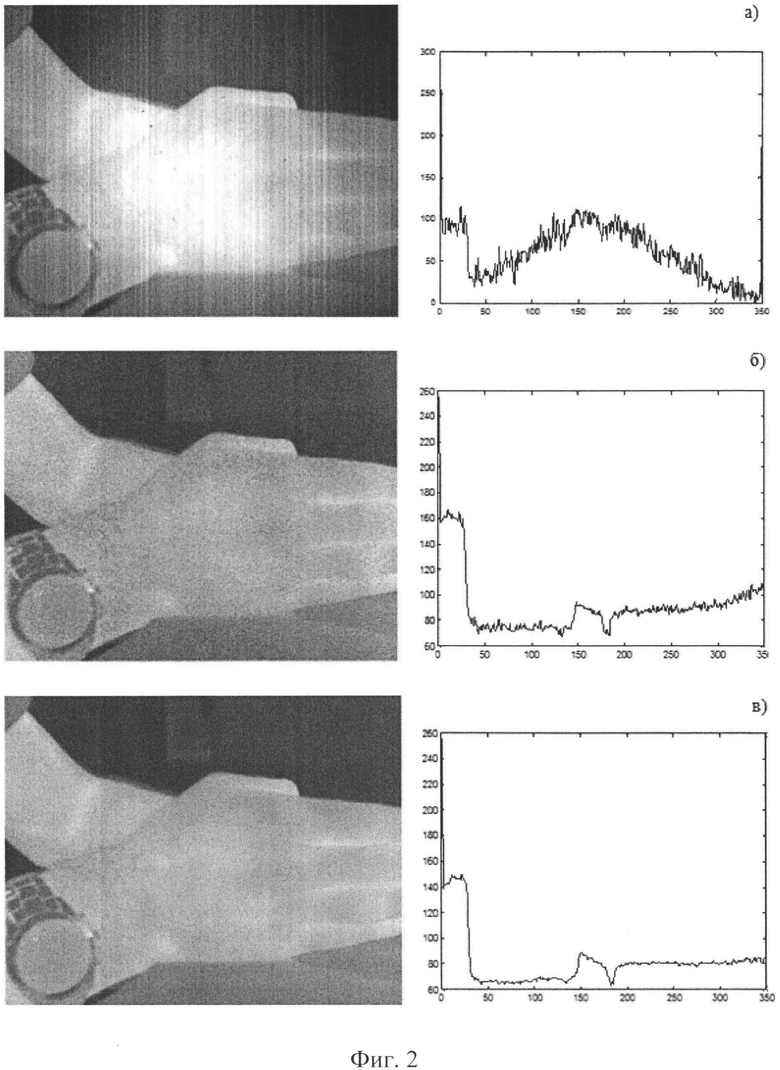
Способ компенсации геометрического шума матричного фотоприемника, заключающийся в предварительной его калибровке путем поочередного равномерного облучения элементов фотоприемной матрицы от источника с низким и высоким уровнем излучения, запоминании в цифровой форме значений яркости элементов кадров изображений y1 и у2 для низкого и для высокого уровней облучения соответственно, вычислении средних значений m1 и m2 яркости элементов в кадрах изображений y1 и у2 соответственно, вычислении для каждого элемента кадра коэффициентов k по формуле: k=(y2-y1)/(m2-m1), получении в цифровой форме значений яркости элементов кадра изображения y в процессе информативного облучения и формировании цифровых значений яркости выходного изображения х в соответствии с выражением x=(y-y1)/k+m1, отличающийся тем, что цифровые значения яркости элементов кадра изображения y1 в процессе калибровки запоминают при минимальном времени экспозиции фотоприемника tмин, задают максимальное время экспозиции tмакс при низком уровне равномерной облученности фотоприемника и запоминают в цифровой форме получаемые при этом значения яркости элементов кадра изображения yмакс, вычисляют их среднее значение, осуществляют преобразования по формулам x1=(y2-y1)k+m1 и x2=(у2-умакс)k+mмакс и запоминают полученные значения яркости элементов кадров изображений х2 и х1, вычисляют коэффициент a=(t-tмин)/(tмакс-tмин) для устанавливаемого времени t экспозиции фотоприемника в пределах tмин≤t≤tмакс, вычисляют значения яркости элементов эталонного кадра изображения у0 по формуле у0=ах2+(1-а)х1 и определяют их среднюю яркость m0, а при информативном облучении фотоприемника с установленным временем экспозиции t формируют выходное изображение X в соответствии с выражениями Х=х-у0+m0, если t≠tмин и X=x, если t=tмин.
| СПОСОБ КОМПЕНСАЦИИ НЕОДНОРОДНОСТИ СИГНАЛА ФОТОЧУВСТВИТЕЛЬНЫХ ЭЛЕМЕНТОВ МНОГОЭЛЕМЕНТНОГО ФОТОПРИЕМНИКА | 2010 |
|
RU2449491C1 |
| СПОСОБ ЭЛЕКТРОННОЙ ОБРАБОТКИ СИГНАЛОВ ФОТОПРИЕМНИКА ПРИ ФОРМИРОВАНИИ ИЗОБРАЖЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2423016C1 |
| Приспособление для выравнивания натяжения нитей, сматываемых порозень с отдельных паковок | 1960 |
|
SU134643A1 |
| Д.С | |||
| БРОНДЗ и др., Коррекция геометрического шума МФПУ с помощью аппроксимации методом наименьших квадратов передаточных характеристик матрицы полиномом Т-го порядка, Журнал радиоэлектроники, N 11, 2008, опубл | |||
| Походная разборная печь для варки пищи и печения хлеба | 1920 |
|
SU11A1 |
| Найдено в сети Интернет по адресу: https://web.archive.org/web/20170511084828/http://jre.cplire.ru/iso/nov08/2/text.html | |||
| US 8503821 B2, 06.08.2013 | |||
| Способ защиты переносных электрических установок от опасностей, связанных с заземлением одной из фаз | 1924 |
|
SU2014A1 |

