Изобретение относится к измерительной технике и может быть использовано, например, для измерения с помощью оптического приемника изображения линейных и угловых перемещений в машиностроении, станкостроении, автомобилестроении и робототехнике.
Известен способ измерения компонентов сложных перемещений, реализованный в устройстве измерения углового положения и перемещения объекта [1], заключающийся в использовании связанного с контролируемым объектом распределенного в пространстве тестового объекта, выполненного в виде кодового лимба со штрихами, и формировании изображения штрихов в плоскости приемника изображения, по которым судят о перемещениях контролируемого объекта.
Недостатком известного способа является недостаточная точность из-за большого расстояния между штрихами, нанесенными на тестовый объект, ограниченные функциональные возможности из-за сложности и громоздкости тестового объекта, низкая информативность из-за отсутствия измерения линейного перемещения объекта.
Известен способ измерения компонентов сложных перемещений, реализованный в фотоэлектрическом измерительном устройстве [2], заключающийся в использовании тестового объекта в виде штриховой миры, сканатора, диафрагмы генератора опорных сигналов в виде двух разнесенных на известное базовое расстояние щелевых отверстий и снабжении анализатора изображения дополнительной ветвью измерения третьей линейной координаты и угловых перемещений.
Недостатком известного способа является недостаточная точность из-за большого расстояния между штрихами, сложность и громоздкость реализации, приводящие к ограничениям в практических применениях.
Наиболее близким по технической сущности к заявленному является способ измерения перемещений, реализованный в измерителе угловых перемещений [3], заключающийся в использовании тест-объекта с периодической структурой и характерной маркой, оптической системы и анализатора координат изображения с другой периодической структурой, образованной расположением фотоприемных областей, оптически связанных так, что линейные координаты изображения тест-объекта в анализаторе зависят от углового положения хотя бы одного из компонентов оптической системы, связанного с контролируемым объектом.
Недостатком известного способа является недостаточная информативность и ограниченные функциональные возможности из-за отсутствия измерения линейного перемещения контролируемого объекта, недостаточная точность из-за большого расстояния между элементами периодических структур, нанесенных на тестовый объект и фотоприемную область, сложности и громоздкости реализации.
Техническим результатом изобретения являются упрощение, повышение информативности и расширение функциональных возможностей за счет обеспечения измерения линейного перемещения контролируемого объекта, повышение точности измерения.
Сущность изобретения заключается в том, что в известном способе измерения компонентов сложных перемещений объекта, осуществляемом с помощью оптической системы и заключающемся в использовании связанного с контролируемым объектом распределенного в пространстве видимого тестового объекта, формировании изображения последнего в приемнике изображения, где создается шкала и по перемещениям изображения относительно которой судят о перемещениях контролируемого объекта, по п.1 формулы изобретения в качестве тестового объекта используют отрезок прямой известной длины L, шкалу формируют в виде 2-х виртуальных меток, жестко фиксируемых в начальный такт измерения на поверхности приемника изображения в определенных заранее 2-х точках изображения тестового объекта, и по расстояниям от соответствующих виртуальных меток до выбранных 3-х точек изображения тестового объекта, складывающихся из известных элементов изображения отрезка L и перемещений названных 3-х точек изображения тестового объекта, определяют компоненты перемещений контролируемого объекта, характеризующие его линейное перемещение вдоль оси ОХ и поворот вдоль оси OY декартовой системы координат в последующие такты измерения.
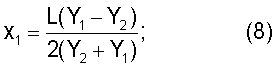
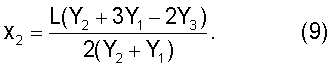
В реализации по п.2 формулы изобретения виртуальные метки фиксируют на поверхности приемника изображения в точках, совпадающих в начальный такт измерения с одной из крайних и центральной точками изображения тестового объекта, в последующие такты измеряют значения расстояний от обоих крайних точек изображения тестового объекта до виртуальной метки, зафиксированной в центре изображения тестового объекта в начальный такт измерения, и значения расстояния от одной из крайних точек изображения тестового объекта до виртуальной метки, зафиксированной в положении другой крайней точки изображения тестового объекта в начальный такт измерения, а значения компонентов, характеризующих линейное перемещение контролируемого объекта вдоль оси ОХ и его поворот вдоль оси OY декартовой системы координат, определяют по формулам:
где Y1, Y2 - величины расстояний от обоих крайних точек изображения тестового объекта до виртуальной метки, совпадающей с центром изображения тестового объекта в начальный такт измерения; Y3 - величина расстояния от одной из крайних точек изображения тестового объекта до виртуальной метки, совпадающей с положением другой точки изображения тестового объекта в начальный такт измерения; L - известная длина тестового объекта.
В реализации по п.3 формулы изобретения виртуальные метки фиксируют на поверхности приемника изображения в точках, совпадающих в начальный такт измерения с крайними точками изображения тестового объекта, в последующие такты измеряют значения расстояний от центральной точки изображения тестового объекта до названных виртуальных меток и значения расстояния от одной из крайних точек изображения тестового объекта до виртуальной метки, зафиксированной в положении другой крайней точки изображения тестового объекта в начальный такт измерения, а значения компонентов, характеризующих линейное перемещение контролируемого объекта вдоль оси ОХ и его поворот вдоль оси OY декартовой системы координат, определяют по формулам:

где Y1, Y2 - величины расстояний от центральной точки изображения тестового объекта до виртуальных меток, совпадающих с положениями крайних точек изображения тестового объекта в начальный такт измерения; Y3 - величина расстояния от одной из крайних точек изображения тестового объекта до виртуальной метки, совпадающей с положением другой точки изображения тестового объекта в начальный такт измерения; L - известная длина тестового объекта.
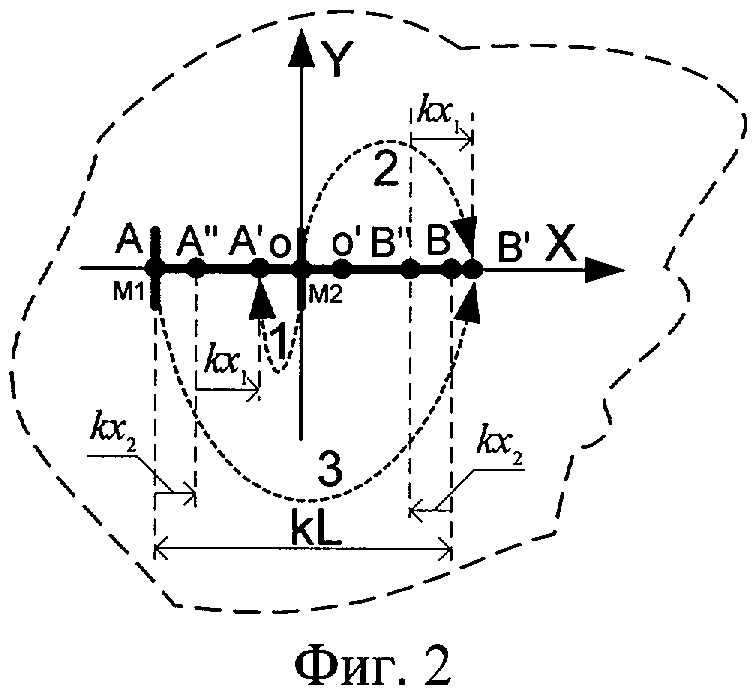
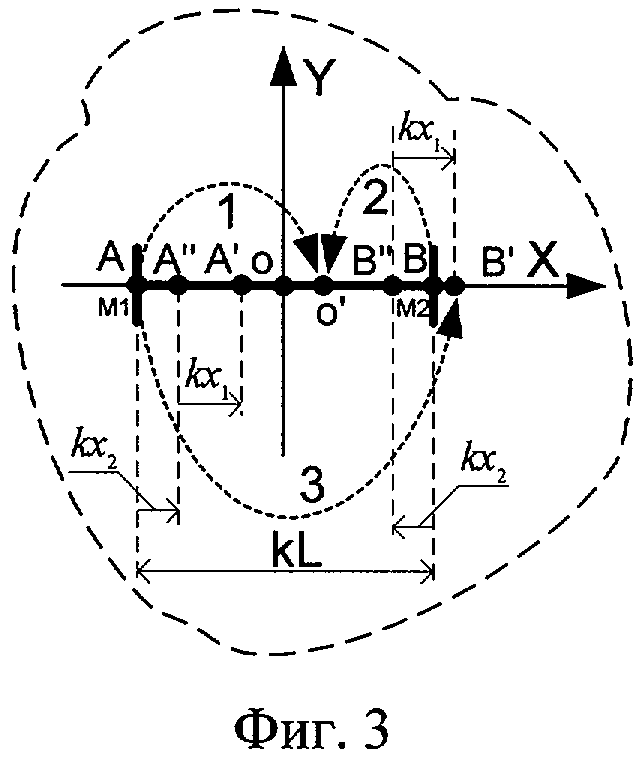
Сущность изобретения поясняется чертежами, где на фиг.1 показана графическая модель перемещений тестового объекта АВ, жестко связанного с контролируемым объектом, и его проекция на плоскость приемника изображения, на фиг.2 - вариант графической модели изображений компонентов перемещения выбранных точек тестового объекта АВ относительно меток M1 и M2 в соответствие с п.1 и 2 формулы изобретения, на фиг.3 - вариант графической модели изображений компонентов перемещения выбранных точек тестового объекта АВ относительно меток M1 и M2 в соответствие с п.1 и 3 формулы изобретения.
Основными элементами устройства, необходимыми для реализации способа, являются тестовый объект в виде отрезка прямой, жестко связанный или нанесенный на контролируемый объект, и унифицированный цифровой фотоаппарат, сопряженный с устройством обработки цифровых изображений, в качестве которого можно использовать персональный компьютер.
Способ измерения компонентов сложных перемещений объекта реализуется следующим образом. Тестовый объект, выполненный в виде отрезка прямой АВ известной длины L и жестко связанный с контролируемым объектом (на фиг.1 не показан), в первый такт измерения занимает положение 1, совпадающее с направлением координатной оси Х. Центр тестового объекта находится в точке О. В следующий, второй, такт измерения тестовый объект занимает положение 2 и обозначен в этом положении отрезком прямой А'В'. Центр тестового объекта занимает положение О'. Предположим, в процессе перемещения из положения 1 в положение 2 тестовый объект претерпевает линейное перемещение  в направлении оси Х и поворот на угол α вокруг оси Y подвижной системы координат, присоединенной к тестовому объекту в его центре, как показано на фиг.1. Соответственно вектора
в направлении оси Х и поворот на угол α вокруг оси Y подвижной системы координат, присоединенной к тестовому объекту в его центре, как показано на фиг.1. Соответственно вектора  коллинеарные оси Х и направленные от точек А и В к центру тестового объекта являются проекциями перемещений на ось Х точек А и В в результате поворота тестового объекта на угол α и соответствующим образом характеризуют этот поворот. Оптический приемник изображения установлен таким образом, что на его чувствительную поверхность 3, перпендикулярную плоскости OXY, проецируется изображение тестового объекта АВ. Для удобства по примеру зрения человека на фиг.2 и 3 показано дважды инвертированное изображение тестового объекта АВ в первый такт измерения и А'В' во второй такт измерения. Коэффициент k является коэффициентом передачи оптического канала.
коллинеарные оси Х и направленные от точек А и В к центру тестового объекта являются проекциями перемещений на ось Х точек А и В в результате поворота тестового объекта на угол α и соответствующим образом характеризуют этот поворот. Оптический приемник изображения установлен таким образом, что на его чувствительную поверхность 3, перпендикулярную плоскости OXY, проецируется изображение тестового объекта АВ. Для удобства по примеру зрения человека на фиг.2 и 3 показано дважды инвертированное изображение тестового объекта АВ в первый такт измерения и А'В' во второй такт измерения. Коэффициент k является коэффициентом передачи оптического канала.
В соответствии с заявленным способом в начальный, первый, такт измерения на изображении тестового объекта АВ в определенных его точках, например в точке А, являющейся крайней точкой изображения тестового объекта АВ, и в точке О, расположенной в его центре, как показано на фиг.2, или в точках А и В, являющихся крайними точками изображения тестового объекта АВ, как показано на фиг.3, формируют виртуальные метки M1 и M2. Виртуальные метки M1 и M2 в соответствие с п.1 формулы изобретения могут быть зафиксированы и в других определенных заранее точках изображения тестового объекта АВ в начальный такт измерения.
Расстояния от выбранных виртуальных меток M1 и M2 до соответствующих точек изображения тестового объекта АВ могут быть представлены выражениями, составляющими следующую систему уравнений:
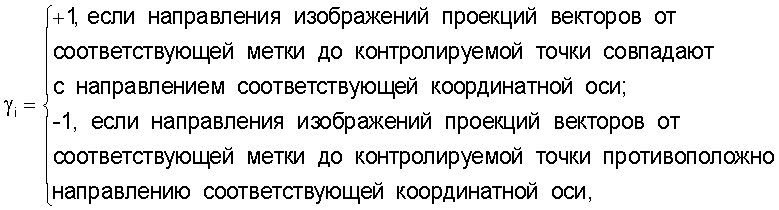
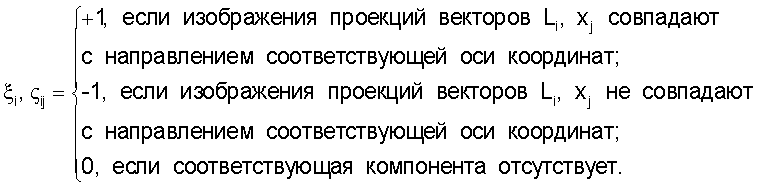
где количество уравнений определяется количеством неизвестных, в данном случае: х1 и x2 - искомые информативные компоненты, a k - коэффициент передачи оптического канала; Li=μiL, μI=[0,1], т.е. μi может принимать определенные заранее значения от 0 до 1; коэффициенты γi, ξi, ςij принимают значения в соответствии с соглашениями:
Положения меток M1, M2 и контролируемых точек изображения тестового объекта АВ выбираются таким образом, что функциональный определитель:

Тогда из системы уравнений (1) определяют компоненты перемещений контролируемого объекта х1 и x2, характеризующие его линейное перемещение вдоль оси ОХ и поворот вдоль оси OY декартовой системы координат в последующие такты измерения, в соответствии с выражениями:

где τ - определяется тактом измерения.
В соответствие вариантом по п.2 расстояния во второй такт измерения от меток M2, M2 и M1, зафиксированных на плоскости приемника изображения в первый такт измерения в точках соответственно О и А, как показано на фиг.2, до точек соответственно А', В' и В' определяются выражениями:

где μi принимают значения:  ;
;  ; μ3=1.
; μ3=1.
Тогда из системы уравнений (4) определяют компоненты перемещений контролируемого объекта х1 и x2, характеризующие его линейное перемещение вдоль оси ОХ и поворот вдоль оси OY декартовой системы координат в последующие такты измерения, в соответствии с выражениями:


В соответствии с вариантом по п.3 расстояния во второй такт измерения от меток М1, M2 и M1, зафиксированных на плоскости приемника изображения в первый такт измерения в точках соответственно А и В, как показано на фиг.3, до точек соответственно O', O' и В' определяются выражениями:

где μi также принимают значения:  ;
;  ; μ3=1.
; μ3=1.
Тогда из системы уравнений (7) определяют компоненты перемещений контролируемого объекта х1 и х2, характеризующие его линейное перемещение вдоль оси ОХ и поворот вдоль оси OY декартовой системы координат в последующие такты измерения, в соответствии с выражениями:
Технический результат предложенного способа, обеспечивающий его преимущества по сравнению с известными аналогами и прототипом, заключается в существенном упрощении реализации, так как основными элементами устройства, необходимыми для осуществления способа, являются простой тестовый объект в виде отрезка прямой и унифицированный цифровой фотоаппарат, сопряженный с устройством обработки цифровых изображений, в качестве которого можно использовать персональный компьютер. Заявленное техническое решение позволяет повысить точность измерения за счет применения в качестве приемника изображения современных фотоприемных матриц с высокой разрешающей способностью и отсутствием каких-либо механических элементов, требующих дополнительной юстировки. Повышаются также информативность измерения и расширяются его функциональные возможности за счет обеспечения измерения компонентов сложных перемещений контролируемого объекта.
Источники информации
1. Пат. 2120105 РФ, МКИ G01В 11/00, G01В 11/26, G01В 21/00, G01В 21/22. Преобразователь угловых перемещений / А.В.Балай, В.И.Беляев, Е.Р.Маламед, Ю.Н.Петров. - Заявл. 11.06.96; Опубл. 10.10.98.
2. Пат. 2057286 РФ, МКИ G01В 11/00. Фотоэлектрический измеритель перемещений / В.Я.Колючкин, Г.М.Мосягин, В.Н.Рязанов. - Заявл. 14.07.93; Опубл. 27.03.96.
3. Пат. 2116618 РФ, МКИ G01В 11/26, G01С 1/00. Измеритель углов (варианты) / А.В.Голицын. - Заявл. 02.06.94; Опубл. 27.07.98.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ КОМПОНЕНТОВ СЛОЖНЫХ ПЕРЕМЕЩЕНИЙ ОБЪЕКТА | 2015 |
|
RU2610425C2 |
| СПОСОБ КОНТРОЛЯ ТОЧНОСТИ КОНТУРНЫХ ПЕРЕМЕЩЕНИЙ ПРОМЫШЛЕННЫХ РОБОТОВ | 2011 |
|
RU2466858C1 |
| СТЕНД ДЛЯ КОНТРОЛЯ ТОЧНОСТИ КОНТУРНЫХ ПЕРЕМЕЩЕНИЙ ПРОМЫШЛЕННОГО РОБОТА | 2011 |
|
RU2472612C1 |
| ИНФОРМАЦИОННО-ИЗМЕРИТЕЛЬНАЯ СИСТЕМА ПЕРЕМЕЩЕНИЙ И ДЕФОРМАЦИЙ ОБЪЕКТА | 2005 |
|
RU2307315C1 |
| СПОСОБ БЕСКОНТАКТНОГО ИЗМЕРЕНИЯ ЛИНЕЙНЫХ РАЗМЕРОВ ТРЕХМЕРНЫХ ОБЪЕКТОВ | 2006 |
|
RU2334195C2 |
| СПОСОБ ЛАЗЕРНОГО ВИДЕОИЗМЕРЕНИЯ РЕЛЬЕФА ПОВЕРХНОСТИ | 2007 |
|
RU2338998C1 |
| СПОСОБ БЕСКОНТАКТНОГО ИЗМЕРЕНИЯ ЛИНЕЙНЫХ РАЗМЕРОВ ТРЕХМЕРНЫХ ОБЪЕКТОВ | 2009 |
|
RU2433372C2 |
| СПОСОБ УПРАВЛЕНИЯ МАНИПУЛЯТОРОМ | 2021 |
|
RU2761924C1 |
| СПОСОБ ТЕПЛОВИЗИОННОГО РАСПОЗНАВАНИЯ ФОРМЫ ОБЪЕКТОВ | 2010 |
|
RU2431936C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОСТУПАТЕЛЬНОГО ПЕРЕМЕЩЕНИЯ ВЕРТОЛЕТА НА ПОСАДКЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2334945C1 |
Способ измерения компонентов сложных перемещений объекта осуществляется с помощью оптической системы и заключается в использовании связанного с контролируемым объектом распределенного в пространстве видимого тестового объекта, формировании изображения последнего в приемнике изображения, где создается шкала и по перемещениям изображения относительно которой судят о перемещениях контролируемого объекта. В качестве тестового объекта используют отрезок прямой известной длины L, шкалу формируют в виде 2-х виртуальных меток, жестко фиксируемых в начальный такт измерения на поверхности приемника изображения в определенных заранее 2-х точках изображения тестового объекта. По расстояниям от соответствующих виртуальных меток до выбранных 3-х точек изображения тестового объекта, складывающихся из известных элементов изображения отрезка L и перемещений названных 3-х точек изображения тестового объекта, определяют компоненты перемещений контролируемого объекта, характеризующие его линейное перемещение вдоль оси ОХ и поворот вокруг оси OY декартовой системы координат в последующие такты измерения. Технический результат - упрощение, повышение информативности и расширение функциональных возможностей за счет обеспечения измерения линейного перемещения контролируемого объекта, повышение точности измерения. 2 з.п. ф-лы, 3 ил.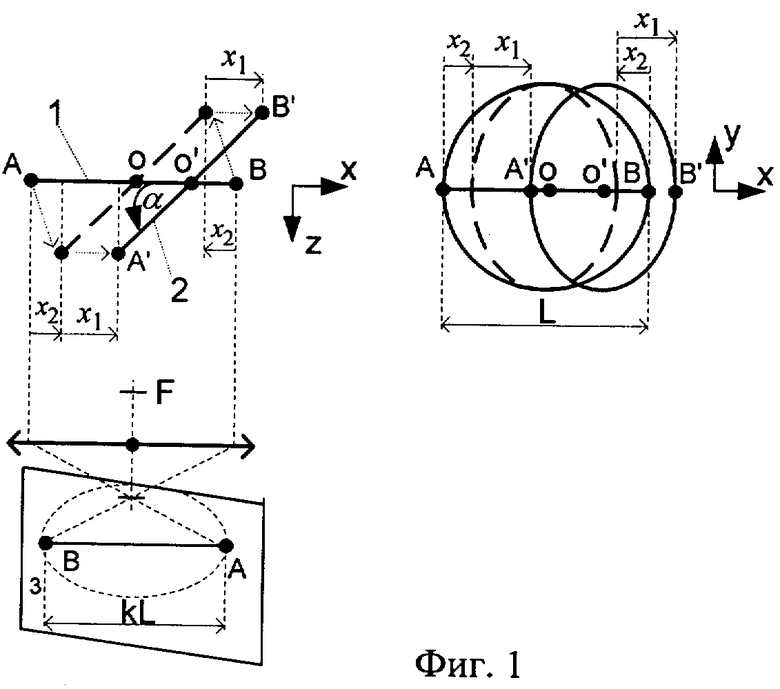

где Y1, Y2 - величины расстояний от обоих крайних точек изображения тестового объекта до виртуальной метки, совпадающей с центром изображения тестового объекта в начальный такт измерения; Y3 - величина расстояния от одной из крайних точек изображения тестового объекта до виртуальной метки, совпадающей с положением другой точки изображения тестового объекта в начальный такт измерения; L - известная длина тестового объекта.
где Y1, Y2 - величины расстояний от центральной точки изображения тестового объекта до виртуальных меток, совпадающих с положениями крайних точек изображения тестового объекта в начальный такт измерения; Y3 - величина расстояния от одной из крайних точек изображения тестового объекта до виртуальной метки, совпадающей с положением другой точки изображения тестового объекта в начальный такт измерения; L - известная длина тестового объекта.
| ИЗМЕРИТЕЛЬ УГЛОВ (ВАРИАНТЫ) | 1994 |
|
RU2116618C1 |
| ФОТОЭЛЕКТРИЧЕСКИЙ ИЗМЕРИТЕЛЬ ПЕРЕМЕЩЕНИЙ | 1993 |
|
RU2057286C1 |
| DE 19620419 A, 27.11.1997 | |||
| 1972 |
|
SU414559A1 | |
| ПРЕОБРАЗОВАТЕЛЬ УГЛОВЫХ ПЕРЕМЕЩЕНИЙ | 1996 |
|
RU2120105C1 |
| Фотоэлектрическое устройство для измерения поперечных перемещений предмета | 1981 |
|
SU976292A1 |

