Изобретение относится к радиолокации и может быть использовано в радиолокационных станциях.
В настоящее время большое распространение получают радиолокационные станции (РЛС) с плоской фазированной антенной решеткой (ФАР). РЛС с плоской фазированной антенной решеткой с двумерным движением луча (определяется дальность, азимутальное направление и высота цели) позволяют осуществлять быстрый обзор пространства, адаптацию к конкретной радио обстановке, обеспечение электромагнитной совместимости и т.д. Однако большое число, прежде всего управляющих устройств (фазовращателей, управляемых аттенюаторов, блоков управления и питания), приводит к значительному увеличению стоимости антенной решетки. Существенно меньшую стоимость имеет плоская фазированная антенная решетка с одномерным движением луча (по азимуту), позволяющая определять только азимутальное направление и дальность до цели. Плоская фазированная антенная решетка с одномерным движением луча представляет собой систему столбцов (либо группы столбцов) излучателей, каждый из которых присоединен к управляющему устройству. Следовательно, для такой ФАР необходимы управляющие устройства не для каждого отдельного излучателя, а для столбцов излучателей. Таким образом, плоская фазированная антенная решетка с одномерным движением луча имеет значительно меньшую стоимость. Так как в плоских ФАР предельные значения угла сканирования составляют величины порядка 60-70° (Справочник по радиолокации, редактор М. Сколник пер. с английского, изд. «Советское Радио» М. 1977 т. 2, стр. 135.), то для получения кругового обзора часто используют механическое вращение антенной решетки при этом угол сканирования уменьшают. Для такой антенной решетки, использующей механическое вращение, особую важность приобретает вес и габариты антенны с входящими устройствами. Сравнительно небольшой вес и габариты в этом случае можно получить, используя антенную решетку с одномерным движением луча. Это все обеспечивает широкое применение плоских фазированной антенных решеток с одномерным движением луча.
При разработке радиолокационной станции (РЛС), в том числе и с плоской фазированной антенной решеткой, возникает задача создания РЛС, способной определять не только азимут и дальность, но и высоту радиолокационных целей, хотя бы грубо. Это позволило бы за счет целеуказания высотомеру существенно сократить сектор поиска цели по углу места и, соответственно, увеличить производительность и зону измерения высоты системой дальномер-высотомер.
Существуют различные способы определения высоты за счет сканирования диаграммы направленности в угломестной плоскости (способы электронного сканирования, фазовый и проч.), которые могут быть реализованы для плоских фазированных антенных решеток.
Рассмотрим некоторые из этих способов.
Широкое распространение получил метод электронного сканирования, в котором используется остронаправленная в вертикальной плоскости антенна. Такая антенна имеет большой эффективный раскрыв антенны (большое количество строк). Так высотомер в РЛС 55Ж6 имеет 16 строк, с помощью которых осуществляет последовательное электронное сканирование в угломестной плоскости. (Зачепицкий А.А. Путь к трем координатам, журнал ВОЗДУШНО-КОСМИЧЕСКАЯ ОБОРОНА, вып. 4, 2007 г.) Таким образом, для получения узкой в вертикальной плоскости диаграммы направленности такая антенна должна обязательно иметь большое количество вертикально расположенных строк, с помощью которых создается узкая в вертикальной плоскости диаграмма направленности. Кроме того, для получения сканирования диаграммы направленности в вертикальной плоскости необходимо изменять амплитудно-фазовое или фазовое распределение вертикально расположенных строк.
Известен еще способ измерения углов места - метод парциальных диаграмм. Сущность этого метода заключается в том, что диаграмма направленности антенны на передачу имеет косекансную форму, а на прием антенна РЛС имеет диаграмму направленности в виде нескольких узких лепестков, расходящихся веером в угломестной плоскости. При этом каждому лепестку соответствует отдельный приемный канал. Данный метод используется в РЛС 22Ж6 (Основы построения радиолокационных станций радиотехнических войск учебник под общей редакцией В.Н. Тяпкина г. Красноярск 2011 т стр. 129). Метод парциальных диаграмм позволяет достаточно точно определять угол места (высоту). Однако для получения диаграммы направленности в виде нескольких узких лепестков, расходящихся веером в угломестной плоскости антенна должна обязательно иметь большое количество вертикально расположенных строк (излучателей), с помощью которых создается диаграмма направленности с набором из нескольких узких лепестков в вертикальной плоскости. Так в РЛС 22Ж6 используется эквидистантная 55-элементная рупорная линейная решетка излучателей (Основы построения радиолокационных станций радиотехнических войск учебник под общей редакцией В.Н. Тяпкина г. Красноярск 2011 т стр. 142).
Другим способом измерения угла места, выбранным в качестве прототипа в связи со сходством выполняемой технической задачи является способ измерения угла места радиолокационных целей радиолокационной станцией метрового диапазона с антенной решеткой, состоящей из двух подрешеток с разнесенными по высоте фазовыми центрами, основанный на измерении отношения амплитуд сигналов в подрешетках антенны, по которому с учетом известной формы диаграмм направленности подрешеток определяют набор возможных значений углов места цели, причем измерение отношения амплитуд сигналов и определение наборов возможных значений углов места производят на нескольких частотах, сравнивают полученные на разных частотах значения и принимают за истинное совпадающее на всех частотах значение угла места (пат. №2317566, МПК G01S 13/06, опубликовано 20.02.2008).
Технический результат предлагаемого изобретения - измерение угла места радиолокационных целей радиолокационной станцией с плоской фазированной антенной решеткой с фазовым сканированием, с одномерным движением луча и имеющей механическое вращение.
Указанный технический результат достигается тем, что в радиолокационной станции с плоской фазированной антенной решеткой с фазовым сканированием, с одномерным движением луча в горизонтальной плоскости и имеющей механическое вращение, определяющей за счет механического вращения истинное азимутальное положение цели, потом при механическом повороте полотна антенной решетки на некоторый угол от истинного азимутального положения цели, определяют направление на цель за счет электронного сканирования, затем по разности в азимутальной плоскости между углом, полученным за счет механического поворота полотна антенной решетки и углом, полученным при электронном сканировании и по известной форме азимутальной диаграммы направленности, определяется значение угла места.
В предложенном способе имеются существенные отличия от рассмотренных выше способов определения угла места.
Во всех известных способах определения угла места необходимо несколько, (как минимум две, при использовании гониометрического способа или способе измерения угла места, выбранным в качестве прототипа) разнесенных по высоте (вертикально) систем излучателей (строк с несколькими излучателями). Кроме того, определение угла места производят либо сканированием диаграммы направленности в вертикальной плоскости, либо получением диаграммы направленности в виде нескольких узких лепестков, расходящихся веером в вертикальной плоскости, либо измерением отношения амплитуд сигналов в подрешетках антенны, имеющие различные формы диаграмм направленности в вертикальной плоскости.
В предложенном способе для определения угла места может использоваться одна строка излучателей, образующую плоскую фазированную антенную решетку с фазовым сканированием, с одномерным движением луча в горизонтальной плоскости, а определение угла места производят сканированием диаграммы направленности в горизонтальной плоскости.
Таким образом, во всех рассмотренных известных способах измерения угла места радиолокационных целей используется антенны с несколькими вертикально расположенными горизонтальными строками (в методе электронного сканирования, в котором используется остронаправленная в вертикальной плоскости антенна, кроме того, необходимо большое количество вертикально расположенных горизонтальных строк), либо несколько независимых разнесенных по вертикали антенн.
Это позволяет сделать вывод о соответствии заявляемого изобретения критерию патентоспособности «изобретательский уровень».
Сущность изобретения будет более понятна из приведенного описания и прилагаемых к нему графических материалов.
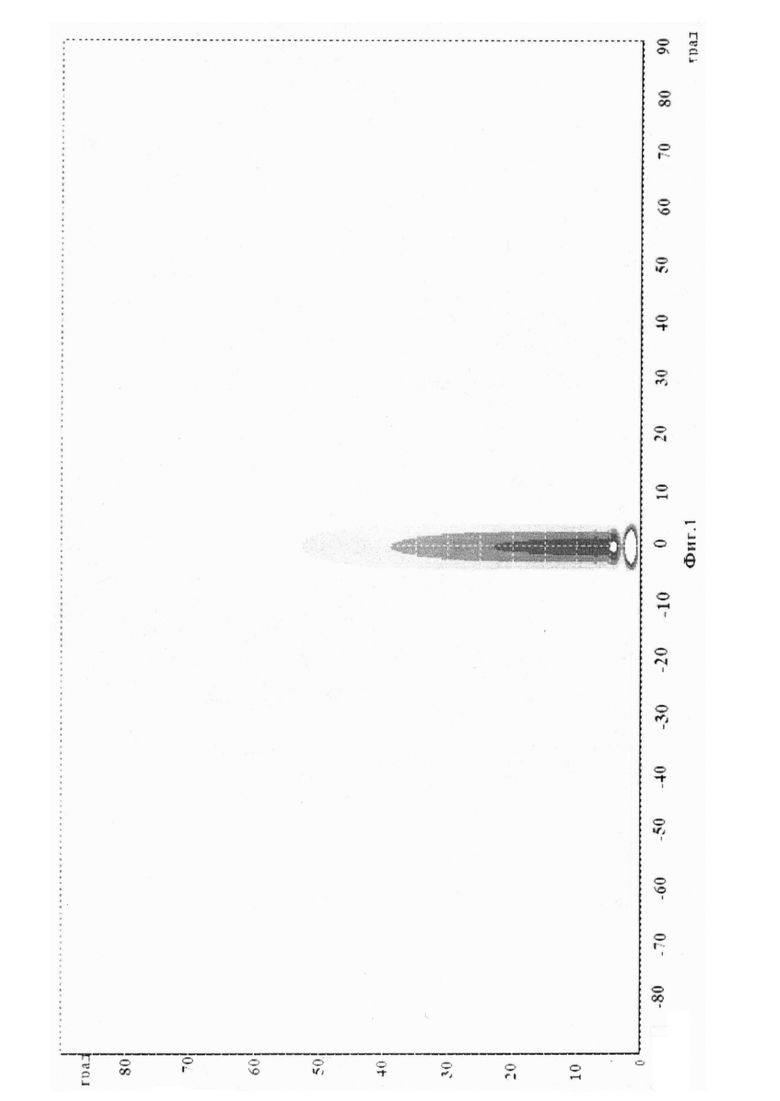
На фиг. 1 показана диаграмма направленности (поперечное сечение), главный луч которой в азимутальной плоскости находится в «нулевом» положении, т.е. положение, при котором главный луч диаграммы направленности имеет одно и то же азимутальное направление при любом угле места
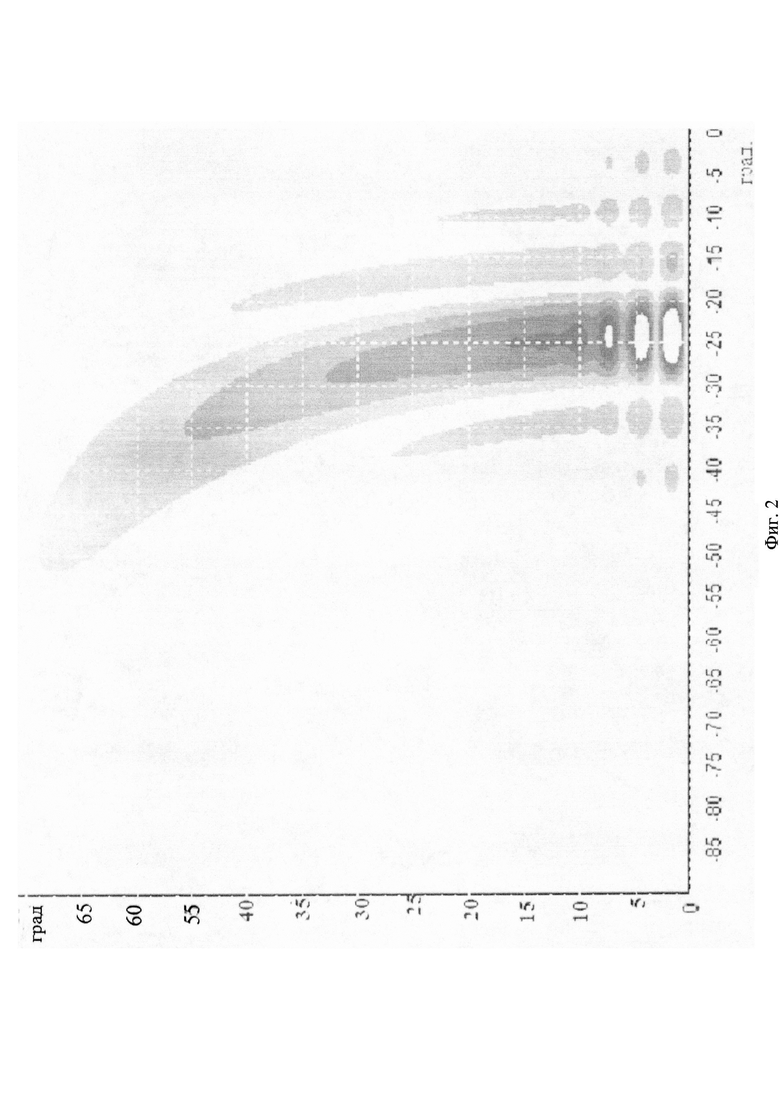
На фиг. 2 показана диаграмма направленности (поперечное сечение), главный луч которой в азимутальной плоскости находится в отклоненном от «нулевого» на - 24 градуса положении (угол места равен 0 градусов).
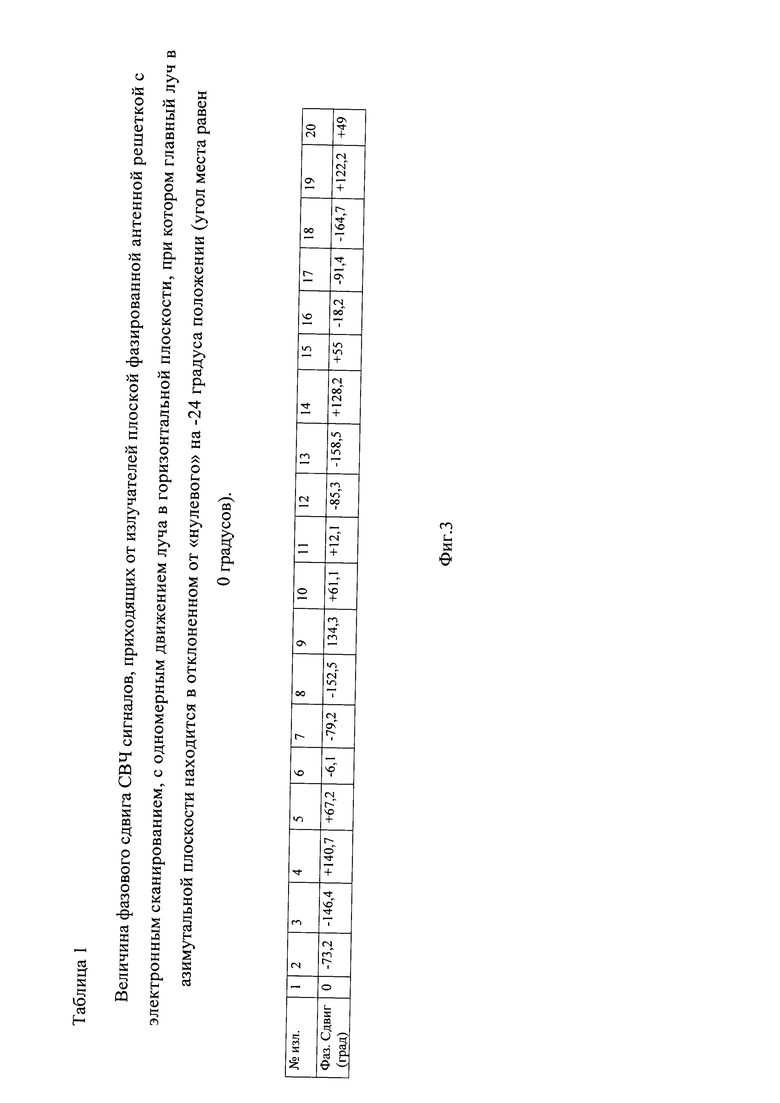
На фиг. 3 приведена таблица 1, в которой показана величина фазового сдвига СВЧ сигналов, приходящих от излучателей плоской фазированной антенной решеткой с фазовым сканированием, с одномерным движением луча в горизонтальной плоскости, при котором главный луч в азимутальной плоскости находится в отклоненном от «нулевого» на -24 градуса положении (угол места равен 0 градусов).
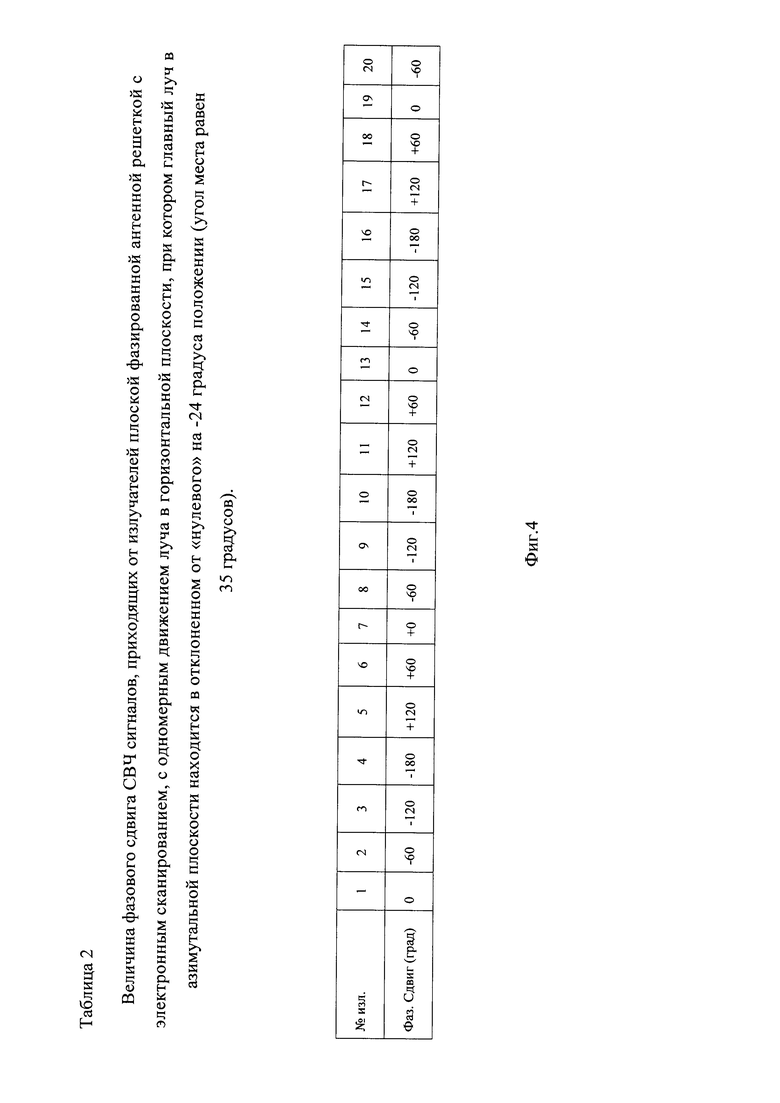
На фиг. 4 приведена таблица 2,, в которой показана величина фазового сдвига СВЧ сигналов, приходящих от излучателей плоской фазированной антенной решеткой с фазовым сканированием, с одномерным движением луча в горизонтальной плоскости, при котором главный луч в азимутальной плоскости находится в отклоненном от «нулевого» на -24 градуса положении (угол места равен 35 градусов).
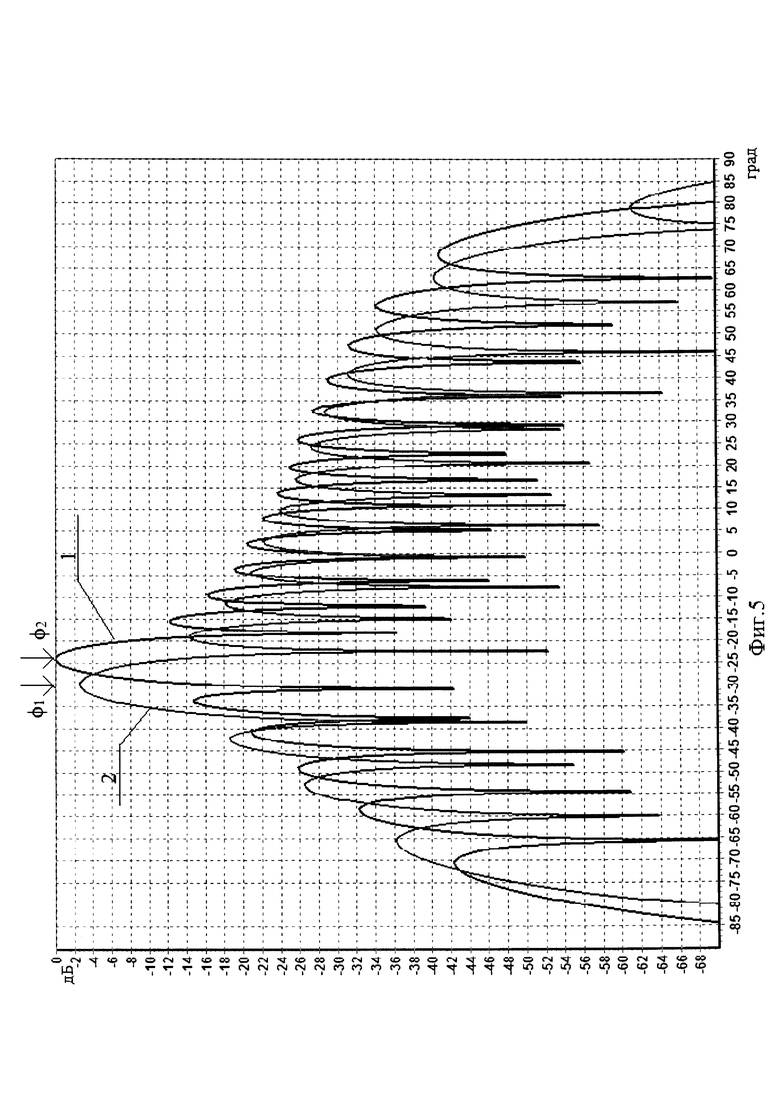
На фиг. 5 показаны диаграммы направленности при отклонении главного луча на с помощью электронного сканирования на -24 градуса:
1 - диаграмма направленности при угле места равном 0 градусов;
2 - диаграмма направленности при угле места равном 35 градусов.
Определение высоты радиолокационных целей происходит следующим образом, сначала определяется истинное азимутальное положение цели. Для этого главный луч диаграммы направленности направлен на цель (угол φ0) и в азимутальной плоскости находится в «нулевом» положении, т.е. положение, при котором главный луч диаграммы направленности имеет одно и то же азимутальное направление при любом угле места (см. Фиг. 1). Затем антенная решетка механически поворачивается в азимутальном направлении на угол φ1 относительно направления на цель (угол φ0). С помощью электронного сканирования диаграммы направленности в азимутальной плоскости определяется азимутальное положение цели (φ2), причем угол φ2 не равен углу φ1. По известной азимутальной диаграмме направленности (см. Фиг. 2, 5) (повернутой с помощью электронного сканирования в азимутальной плоскости) и разности углов между истинным азимутальным положением цели φ1 и полученным при электронном сканировании (φ2) определяется угломестное положение цели (см. Фиг. 5).
Поясним принцип определения высоты радиолокационных целей.
Для получения диаграммы направленности (в данном случае, в азимутальной плоскости) необходимо создать определенное амплитудное и фазовое распределение на излучателях антенной решетки. При синфазном (одинаковая фаза для всех излучателей) фазовом распределении главный луч диаграммы направленности имеет одно и то же азимутальное направление при любом угле места, так как СВЧ сигналы от излучателей складываются синфазно (одной и той же фазой), и это направление перпендикулярно плоскости антенны. При фазовом сканировании (наиболее распространенном) необходимо, чтобы СВЧ сигналы от излучателей складывались с разными строго определенными фазами (Антенны и устройства СВЧ - проектирование фазированных антенных решеток: Учеб. Пособие для ВУЗов, B.C. Филиппов, Л.И. Пономарев, А.Ю. Гринев и др. Под ред. Д.И. Воскресенского, 2-е изд. М., Радио и связь, 1994 стр. 23). Так для изменения азимутального направления главного луча диаграммы направленности необходимо изменить фазовое распределение с синфазного на распределение, при котором на каждом излучателе своя, отличная от других и зависящая от азимутального направления главного луча. Так при азимутальном направлении главного луча диаграммы направленности на -24 градусов (при угле места равном 0) относительно «нулевого» азимутального направления положения распределение значений фаз представлены в таблице 1 (Фиг. 3). Однако при значении угла места прихода СВЧ сигнала отличного от 0° (волновой фронт не перпендикулярен плоскости, в которой расположены излучатели), фазовое распределение меняется. Так при азимутальном направлении главного луча диаграммы направленности на -24 градусов и при угле места 35 градусов фазовое распределение представлено в таблице 2 (Фиг. 4). Как видно из таблиц 1 и 2 фазовое распределение при угле места 35 градусов отличается от фазового распределения при угле места 0 градусов. Следовательно, и положение главного луча диаграммы направленности в азимутальном направлении при угле места 35 градусов будет другим, отличным от - 24 градусов (положение главного луча диаграммы направленности в азимутальном направлении при угле места 0 градусов) (см. Фиг. 2).
Таким образом, известно:
- истинное азимутальное положение цели (φ1), полученное при «нулевом» положении главного луча диаграммы направленности, (с учетом механического поворота антенной решетки в азимутальном направлении на угол φ1 относительно направления на цель (φ0));
- азимутальное положение цели, полученное при помощи электронного сканирования (φ2).
Соответственно определена и разница углов (φ2 - φ2).
При этом, как видно из рисунка (см. фиг. 5) угол электронного сканирования (φ2) (угол поворота главного луча диаграммы направленности при угле места 0 градусов) равен 24 градуса и отличается от истинного азимутального положения цели (φ1) на 6 градусов. Следовательно, с учетом разности углов между истинным азимутальным положением цели φ1 и полученным при электронном сканировании φ2 по известной форме азимутальной диаграммы направленности можно определить значение угломестное положение цели, которое в данном случае, составляет 35 градусов.
Это свойство и позволяет определять угол места радиолокационных целей радиолокационной станцией с плоской фазированной антенной решеткой с электронным сканированием, с одномерным движением луча и имеющей механическое вращение.
Кроме того, зависимость азимутального направления главного луча диаграммы направленности от угла места необходимо учитывать при определении азимутального положения цели с использованием электронного сканирования в РЛС плоской фазированной антенной решеткой с одномерным движением луча.
Использование данного изобретения позволяет создать РЛС с плоской фазированной антенной решеткой с электронным сканированием, с одномерным движением луча и имеющей механическое вращение, способную определять высоту радиолокационных целей. При использовании данных измерения угла места, полученных от такой РЛС, для целеуказания высотомеру возникает значительный энергетический выигрыш. Он обусловлен тем, что отпадает необходимость рассеивать энергию высотомера на поиск цели в полном диапазоне возможных углов места. Эту энергию можно использовать для увеличения времени наблюдения цели в районе целеуказания, что дает выигрыш по дальности обнаружения и измерения траекторных параметров в системе, состоящей из РЛС с плоской фазированной антенной решеткой с электронным сканированием, с одномерным движением луча и высотомера.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ измерения угла места радиолокационных целей цилиндрической фазированной антенной решеткой | 2018 |
|
RU2716262C1 |
| Способ формирования круговой зоны электронного сканирования цилиндрической фазированной антенной решетки с увеличенным темпом обзора | 2019 |
|
RU2713159C1 |
| Способ измерения угла места радиолокационных целей, находящихся на больших углах места | 2017 |
|
RU2674007C1 |
| СПОСОБ ПЕЛЕНГАЦИИ ИСТОЧНИКА АКТИВНЫХ ПОМЕХ | 2019 |
|
RU2699028C1 |
| СПОСОБ ФОРМИРОВАНИЯ И УСТРОЙСТВО МНОГОКАСКАДНОЙ СТАЦИОНАРНОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ С БЕЗЗАТЕНЕННОЙ ЗОНОЙ ОБЗОРА ОКРУЖАЮЩЕЙ ПОВЕРХНОСТИ | 2017 |
|
RU2659406C1 |
| Способ радиолокационного обзора пространства (варианты) | 2016 |
|
RU2638557C1 |
| АНТЕННО-ПРИЕМОПЕРЕДАЮЩАЯ СИСТЕМА РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 2006 |
|
RU2324950C1 |
| Антенная система с механическим сканированием диаграммы направленности | 2016 |
|
RU2622226C1 |
| Способ обзора воздушного пространства импульсно-доплеровской радиолокационной станцией с активной фазированной антенной решеткой | 2022 |
|
RU2794466C1 |
| Способ радиолокационного обзора пространства (варианты) | 2016 |
|
RU2638550C1 |
Изобретение относится к области радиолокации и может быть использовано в радиолокационных станциях (РЛС) с плоской фазированной антенной решеткой с одномерным движением луча. Техническим результатом является обеспечение возможности измерения угла места радиолокационных целей радиолокационной станцией с плоской фазированной антенной решеткой с электронным сканированием, с одномерным движением луча и имеющей механическое вращение. Для этого в радиолокационной станции с плоской фазированной антенной решеткой с электронным сканированием, с одномерным движением луча в горизонтальной плоскости и имеющей механическое вращение в азимутальной плоскости, определяют за счет механического вращения истинное азимутальное положение цели, при механическом повороте полотна антенной решетки на некоторый угол от истинного азимутального положения цели, определяют направление на цель за счет электронного сканирования, затем по разности в азимутальной плоскости между углом, полученным за счет механического поворота полотна антенной решетки и углом, полученным при электронном сканировании, по известной форме азимутальной диаграммы направленности, определяется значение угла места. 5 ил.
Способ измерения угла места радиолокационных целей радиолокационной станцией с плоской фазированной антенной решеткой, имеющей механическое вращение в азимутальной плоскости, использующий электронный метод сканирования с одномерным движением луча в горизонтальной плоскости и определение истинного азимутального положения цели за счет механического вращения, отличающийся тем, что при механическом повороте полотна антенной решетки на некоторый угол от истинного азимутального положения цели определяют направление на цель за счет электронного сканирования, затем по разности в азимутальной плоскости между углом, полученным за счет механического поворота полотна антенной решетки и углом, полученным при электронном сканировании, по известной форме азимутальной диаграммы направленности, определяется значение угла места.
| СПОСОБ ИЗМЕРЕНИЯ УГЛА МЕСТА РАДИОЛОКАЦИОННЫХ ЦЕЛЕЙ ДВУХКООРДИНАТНОЙ РЛС МЕТРОВОГО ДИАПАЗОНА | 2006 |
|
RU2317566C1 |
| Способ измерения угла места радиолокационных целей, находящихся на больших углах места | 2017 |
|
RU2674007C1 |
| US 8466829 B1, 18.06.2013 | |||
| CN 104237844 A, 24.12.2014 | |||
| СПОСОБ РАДИОЛОКАЦИОННОГО ОБЗОРА ПРОСТРАНСТВА И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2582084C1 |
| Способ радиолокационного обзора пространства | 2017 |
|
RU2642453C1 |
| US 5053784 A, 01.10.1991 | |||
| КОМПОЗИЦИЯ ДЛЯ ОКИСЛИТЕЛЬНОЙ ОКРАСКИ КЕРАТИНОВЫХ ВОЛОКОН, СПОСОБ ИХ ОКРАСКИ, НАБОР ДЛЯ ОКИСЛИТЕЛЬНОЙ ОКРАСКИ КЕРАТИНОВЫХ ВОЛОКОН | 2000 |
|
RU2195925C2 |
| US 5557282 A, 17.09.1996. | |||

