Изобретение относится к радиолокации и может быть использовано в двухкоординатных радиолокационных станциях (РЛС) метрового диапазона с антенной решеткой, состоящей из двух подрешеток с разнесенными по высоте фазовыми центрами, для измерения угла места радиолокационных целей.
В частном, но имеющем практическое значение случае в качестве подрешеток могут быть использованы горизонтальные строки двухстрочечной антенны.
Известен способ измерения угла места цели с помощью гониометра [1], который использовался ранее в РЛС П-12 [2], имеющей антенну, изображенную на фиг.1.
Гониометр позволял измерить отношение амплитуд эхо-сигналов цели, принятых строками антенны. По известной форме диаграмм направленности строк антенны и измеренному отношению амплитуд определялся угол места цели. Однако, поскольку диаграммы направленности строк антенны имеют осциллирующий характер (из-за интерференции прямого и отраженного от земли луча), угол места цели определяется неоднозначно - одному измеренному отношению сигналов соответствует несколько углов места (один из них истинный, остальные аномальные (ложные)). Поэтому по опыту эксплуатации гониометр вместе с задачей измерения угла места (высоты) цели был исключен из состава РЛС П-12 и ее дальнейших модификаций (РЛС П-18).
При разработке радиовысотомеров с электронным сканированием луча в вертикальной плоскости, работающих в комплексе с дальномером метрового диапазона, задача измерения угла места дальномером становится вновь особенно актуальной. Возможность измерения угла места дальномером, хотя бы грубо и частично неоднозначно, позволила бы за счет целеуказания высотомеру существенно сократить сектор поиска цели по углу места и, соответственно, увеличить производительность и зону измерения высоты системой дальномер-высотомер.
Принимая в качестве прототипа гониометрический способ измерения угла места цели, который по сути дела сводится к измерению отношения амплитуд сигналов в строках антенны и легко реализуется современными цифровыми технологиями, предлагаемое изобретение позволяет преодолеть или значительно снизить неоднозначность измерения угла места, присущую этому методу, за счет работы на двух-трех частотах. При этом аномальные значения измеренного угла не будут совпадать на разных частотах, а значения, соответствующие истинному углу места цели, будут повторяться на разных частотах всегда.
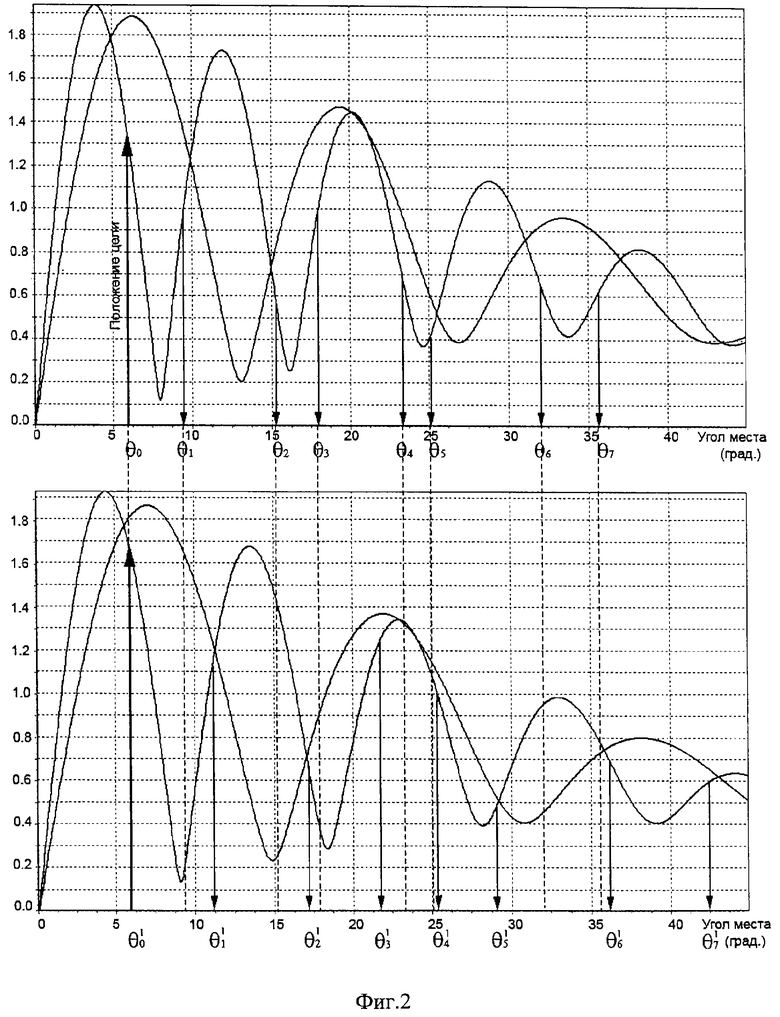
Этот принцип проиллюстрирован на фиг.2. На фиг.2(а) показаны диаграммы направленности строк дальномера на одной из частот рабочего диапазона. Цель расположена на некотором произвольном угле θ0, показанном на графике стрелкой. Измеряется отношение амплитуд эхо-сигналов и по известной форме диаграмм направленности строк определяется набор углов места θ0, θ1,...θN, для которых отношение сигналов имеет такое же значение, как и измеренное.
На фиг.2(б) представлены аналогичные диаграммы направленности на другой частоте диапазона. На этой частоте также измерено отношение амплитуд сигналов и определен другой набор углов места θ0′, θ1′,...θN′. Из сравнения графиков видно, что совпадение найденных углов места наблюдается только в точке истинного положения цели.
В реальности измеренное отношение амплитуд сигналов имеет шумовое размытие тем большее, чем меньше отношение сигнал/шум на трассе полета цели. Это уменьшает точность определения углов места и может привести к совпадению ложных измерений даже при работе на двух частотах. В этом случае для уменьшения числа аномальных измерений целесообразно провести измерение на третьей частоте.
Техническим результатом предлагаемого изобретения является значительное снижение числа неоднозначностей при определении угла места цели в РЛС метрового диапазона за счет работы на двух-трех частотах, в результате чего аномальные измерения становятся по сути единичными и могут быть отсеяны, например, по результатам трассовой обработки.
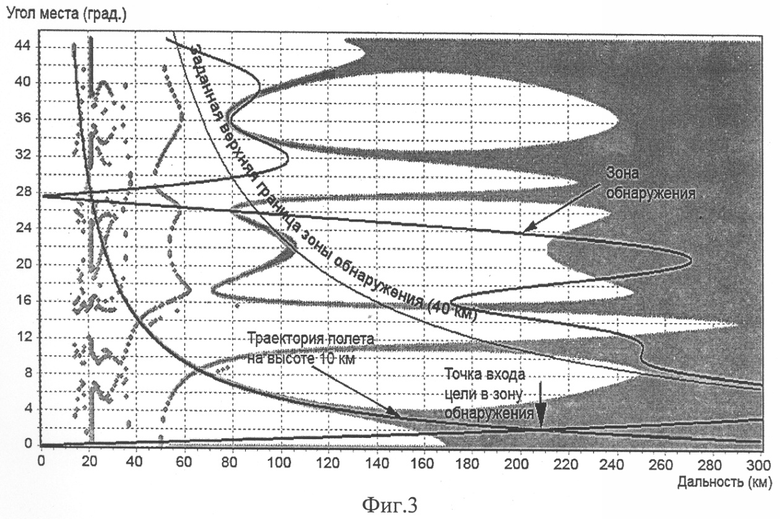
Для оценки точности определения угла места и количества ложных измерений была разработана математическая модель измерителя угла места, работающая по способу измерения отношения сигналов в этажах антенны. Моделирование было проведено для одной, двух и трех частот работы РЛС и горизонтальных траекторий полета цели на высотах 1, 5, 10 и 30 км с учетом изменений отношения сигнал/шум вдоль траектории полета. Моделирование проводилось для РЛС с параметрами, близкими к П-18.
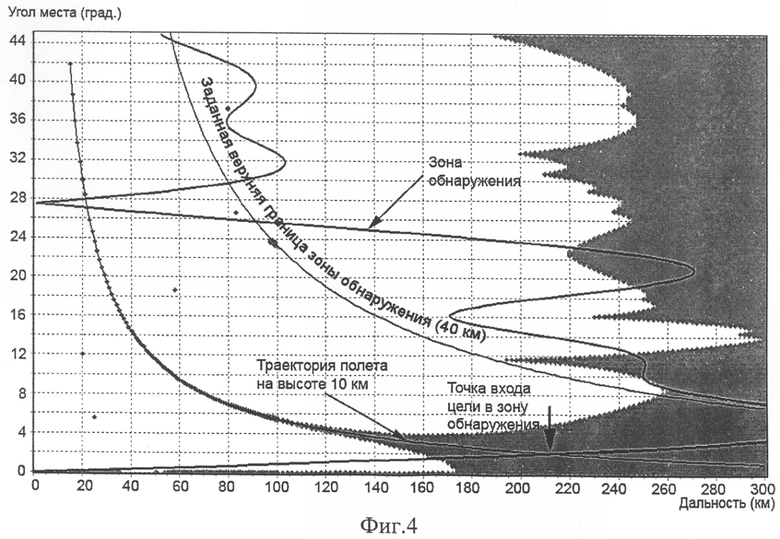
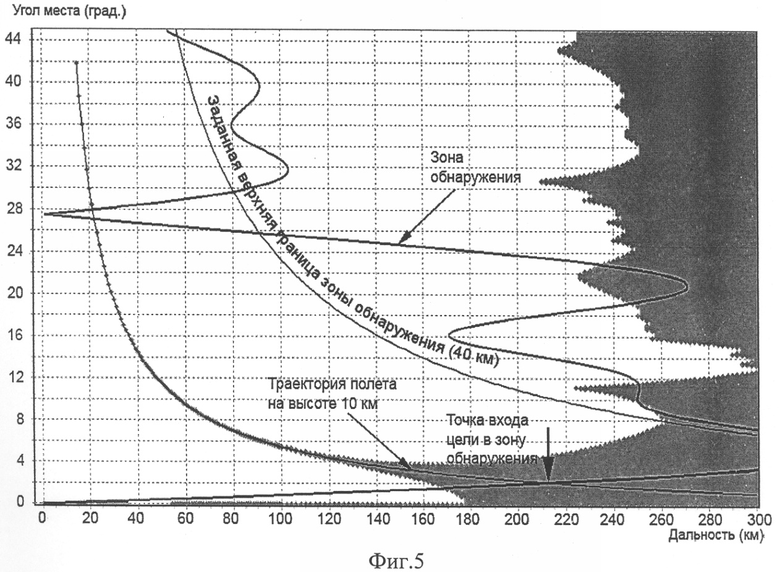
Результаты моделирования для цели, летящей на постоянной высоте 10 км, приведены на фиг.3-5. На них представлены теоретические и полученные в результате модельного эксперимента зависимости угла места от дальности для одно-, двух- и трехчастотного режима работы измерителя, а также зона обнаружения РЛС. Из фиг.3 (одночастотный режим работы) видно большое количество аномальных измерений, которые показаны на чертеже точками серого цвета, местами сливающимися в области. Но уже при работе на двух частотах (фиг.4) число аномальных измерений в пределах зоны обнаружения сократилось до пренебрежимо малого, а при трехчастотном режиме работы измерителя аномальные измерения отсутствуют (фиг.5), за исключением отметок на нулевых углах, которые могут быть отсеяны в процессе трассовой обработки.
При использовании данных измерения угла места дальномером для целеуказания высотомеру с электронно-управляемым лучом в угломестной плоскости возникает значительный энергетический выигрыш. Он обусловлен тем, что отпадает необходимость рассеивать энергию высотомера на поиск цели в полном диапазоне возможных углов места. Эту энергию можно использовать для увеличения времени наблюдения цели в районе целеуказания, что дает выигрыш по дальности обнаружения и измерения траекторных параметров в системе дальномер-высотомер на величину от 1,5 до 2 раз.
Источники информации
1. Г.Н.Кочержевский. Антенно-фидерные устройства. Радио и связь, 1981. Стр.259.
2. РЛС П-12. Веб-сайт http://pvo.guns.ru/rtv/nitel/p12.htm
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ измерения угла места радиолокационных целей, находящихся на больших углах места | 2017 |
|
RU2674007C1 |
| Способ измерения угла места радиолокационных целей плоской фазированной антенной решеткой с одномерным движением луча | 2019 |
|
RU2711736C1 |
| МОБИЛЬНАЯ ТРЕХКООРДИНАТНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 2014 |
|
RU2594285C2 |
| Способ измерения угла места радиолокационных целей цилиндрической фазированной антенной решеткой | 2018 |
|
RU2716262C1 |
| Способ радиолокации целей | 2023 |
|
RU2808952C1 |
| МОБИЛЬНАЯ АНТЕННАЯ УСТАНОВКА | 2018 |
|
RU2695040C1 |
| Способ определения высоты полёта низколетящей цели моноимпульсной РЛС сопровождения в реальном масштабе времени | 2023 |
|
RU2816168C1 |
| СПОСОБ ПЕЛЕНГАЦИИ ИСТОЧНИКА АКТИВНЫХ ПОМЕХ | 2019 |
|
RU2699028C1 |
| АНТЕННАЯ СИСТЕМА И СПОСОБ ЕЕ РАБОТЫ | 2019 |
|
RU2729889C1 |
| Способ высокоточного определения высоты полета низколетящей цели моноимпульсной РЛС сопровождения | 2021 |
|
RU2779039C1 |
Изобретение относится к радиолокации и может быть использовано в двухкоординатных радиолокационных станциях (РЛС) метрового диапазона с антенной решеткой, состоящей из двух подрешеток с разнесенными по высоте фазовыми центрами, для измерения угла места радиолокационных целей. Достигаемым техническим результатом предлагаемого изобретения является значительное снижение числа неоднозначностей при определении угла места цели в РЛС метрового диапазона за счет работы на двух-трех частотах. Указанный результат достигается способом измерения отношения амплитуд сигналов в подрешетках антенны, по которому с учетом известной формы диаграмм направленности подрешеток определяют набор возможных значений углов места цели на нескольких частотах, сравнивают полученные на разных частотах значения и принимают за истинное совпадающее на всех частотах значение угла места. 5 ил.
Способ измерения угла места радиолокационных целей радиолокационной станцией метрового диапазона с антенной решеткой, состоящей из двух подрешеток с разнесенными по высоте фазовыми центрами, основанный на измерении отношения амплитуд сигналов в подрешетках антенны, по которому с учетом известной формы диаграмм направленности подрешеток определяют набор возможных значений углов места цели, отличающийся тем, что измерение отношения амплитуд сигналов и определение наборов возможных значений углов места производят на нескольких частотах, сравнивают полученные на разных частотах значения и принимают за истинное совпадающее на всех частотах значение угла места.
| КОЧЕРЖЕВСКИИ Г.Н | |||
| Антенно-фидерные устройства | |||
| Радио и связь, 1981 | |||
| Арматура для железобетонных свай и стоек | 1916 |
|
SU259A1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛА МЕСТА МАЛОВЫСОТНЫХ ЦЕЛЕЙ | 1992 |
|
RU2038607C1 |
| RU 2005100544 A, 20.06.2006 | |||
| ПОДВИЖНЫЙ ПЕЛЕНГАТОР | 1997 |
|
RU2124222C1 |
| US 2004130488 A1, 08.07.2004 | |||
| WO 2005024454 A2, 17.03.2005 | |||
| US 4639733 A, 27.01.1987. | |||

