Изобретение относится к области радиолокации, в частности к радиолокационным станциям (РЛС) освещения обстановки.
В настоящее время проводка судов по сложным фарватерам и в порту в условиях плохой видимости осуществляется с помощью специальных береговых РЛС, которые обладают высокой разрешающей способностью по пеленгу и расстоянию. (Г.Г. Ермолаев, Е.С. Зотеев, Основы морского судовождения, под ред. Г.Г. Ермолаева, изд. Пятое М., «Транспорт» 1988, стр. 139). При этом возникает задача создания систем, обеспечивающих оперативное наблюдение и проводку целей (судов) по всей длине фарватера. При этом система должна быть надежной, как можно более простой и дешевой, потребляющей минимальное количество энергии.
Так, в отдаленном аналоге заявляемого изобретения для обеспечения оперативного наблюдения и проводки судов по всей длине фарватера с использованием обзорной радиолокационной станции (РЛС) размещают антенну обзорной РЛС на местности в точке, обеспечивающей максимально возможный незатененный обзор окружающего пространства, и осуществляют обзор фарватера. В случае невозможности обзора по условиям рельефа местности (например, извилистого фарватера реки) с помощью одной РЛС из-за наличия закрытых препятствиями участков фарватера для наблюдения подлежащем контролю участке фарватера на центральный пункт наблюдения основной РЛС с устройством ввода передаваемой информации в индикатор основной РЛС (Лентарев А.А. Развитие средств и методов управления движением судов, автореферат диссертации на соискание ученой степени доктора технических наук, Владивосток 2002, УДК 656.052.4(043), стр. 22).
Этот способ имеет следующие недостатки:
- низкую надежность, обусловленную наличием большого количества дополнительных РЛС и аппаратуры для передачи данных от дополнительных РЛС на индикатор основной РЛС;
- техническую сложность неавтоматизированной или автоматизированной системы, а также сложность обслуживания таких систем;
- низкую оперативность и точность передачи данных неавтоматизированной системой;
- большой объем обслуживания;
- высокую стоимость оборудования;
- большую мощность питания;
- ухудшение экологической обстановки в районе установки такой системы из-за установки в системе дополнительных РЛС.
Более близким аналогом технического решения, выбранным в качестве прототипа в связи со сходством выполняемой технической задачи, является способ формирования многокаскадной стационарной радиолокационной станции с беззатененной зоной обзора окружающей поверхности, при котором обзорную радиолокационную станцию с круговым обзором пространства земной и водной поверхности, установленную на местности в точке, обеспечивающей обзор максимально возможной площади окружающего пространства, дополняют включенные в состав обзорной РЛС системы ретрансляторов, устанавливаемые на вершинах препятствий, вызывающих затенение целей, направленные (ориентированные в направлении) расположенные на в линию, перпендикулярную направлению излучения антенны РЛС, причем каждый из ретрансляторов системы включает две антенны - переднюю и заднюю, соединенные своими входами-выходами расположенные на в линию, перпендикулярную направлению излучения антенны РЛС, причем каждый из ретрансляторов системы включает две антенны - переднюю и заднюю, соединенные своими входами-выходами сверхвысокочастотными (СВЧ) трактами, без усилителей СВЧ или с ними, при этом передние антенны ретрансляторов направлены на антенну РЛС, а оси задних антенн ретрансляторов направлены строго в противоположную от антенны РЛС сторону в горизонтальной плоскости и вниз, в сторону находящихся в области тени целей, что обеспечивает прием с использованием указанных систем ретрансляторов, излучаемых антенной РЛС прямых радиолокационных сигналов, трансляцию с усилением или без усиления, через систему ретрансляторов принятых сигналов, излучение принятых сигналов с изменением направления в вертикальной плоскости в сторону затененного данным препятствием участка пространства, облучение ретранслированными сигналами находящихся в зоне тени целей, прием, трансляцию, с усилением или без усиления, через систему ретрансляторов принятых отраженных сигналов, излучение с помощью ретрансляторов в сторону антенны РЛС переотраженных находящимися в зоне тени целями сигналов, прием антенной РЛС, усиление и воспроизведение на экране индикатора РЛС отраженных закрытыми целями сигналов, определение направления на обнаруженные цели и расстояния до них, с учетом временных задержек сигналов в ретрансляторах, при распространении радиоволн в сторону цели и обратно. (Пат. RU №2206904, МКИ G01S 13/74, G01S 13/06, Н04В 7/14, 2003).
Данная система имеет:
- большую надежность функционирования
- высокую оперативность и точность получения информации о закрытых препятствиями целях, не отличающуюся от этих показателей для видимых целей;
- меньший объем обслуживания;
- меньшую стоимость оборудования;
- меньшую мощность питания;
- большую, в числе дополнительно используемых РЛС в системе-прототипе, экологическую чистоту.
Однако, данной системе присущи следующие недостатки:
- невозможность точного определения азимутальных координат цели, в области тени;
- низкая разрешающая способность в области тени (невозможность разделить несколько целей, находящихся в области тени).
Из описания (Пат. RU №2206904, МКИ G01S 13/74, G01S 13/06, Н04В 7/14, 2003) следует, что использование систем ретрансляторов обеспечивает наблюдение всех целей в зонах тени. Однако точное азимутальное положение судов с помощью ретрансляторов невозможно, так как использование системы ретрансляторов, обеспечивает в зоне тени только определение наличия или отсутствие целей и расстояния до них (при их наличии), но не обеспечивает точное определение азимутального положения цели. Использование набора идентичных ретрансляторов (см. Пат. RU №2206904, МКИ G01S 13/74, G01S 13/06, Н04В 7/14, 2003, п. 4 формулы изобретения), которые «одновременно облучаются диаграммой направленности антенны РЛС», обеспечивая «обнаружение в зоне тени целей с заданной эффективной поверхностью рассеяния (ЭПР) на требуемом расстоянии». При наличии в зоне тени не одного, а нескольких целей разделить их (определить количество) невозможно, если они (цели) находятся на одинаковых расстояниях от антенны РЛС 3. Это может привести к столкновению судов.
Технический результат предлагаемого изобретения:
- предложен способ определения количества целей, находящихся в области тени на одинаковых расстояниях от антенны РЛС и их азимутальных координат;
- предложены устройства (ретрансляторы), реализующие способ определения азимутальных координат целей, находящихся в области тени.
Указанный технический результат (способ определения количества целей, находящихся в области тени на одинаковых расстояниях от антенны РЛС и их азимутальных координат) достигается тем, что антенну обзорной радиолокационной станции (РЛС) размещают в точке на местности, обеспечивающей максимально возможный незатененный обзор окружающего пространства, и осуществляют последовательный обзор, выявляют наличие в зоне обзора естественных препятствий, закрывающих находящееся за ними пространство, размещают на указанных препятствиях системы ретрансляторов радиолокационных сигналов, обеспечивающие прием прямых сигналов от РЛС и их трансляцию в сторону находящихся в области тени целей, а также прием отраженных целями сигналов и их ретрансляцию в сторону антенны РЛС, принимают, с использованием указанных систем ретрансляторов, излучаемые антенной РЛС прямые радиолокационные сигналы, транслируют, с усилением или без усиления, через систему ретрансляторов принятые сигналы, излучают принятые сигналы, облучают ретранслированными сигналами находящиеся в зоне тени цели, принимают, транслируют, с усилением или без усиления, через систему ретрансляторов принятые отраженные сигналы, излучают с помощью ретрансляторов в сторону антенны РЛС переотраженные находящимися в зоне тени целями сигналы, принимают антенной РЛС, усиливают и воспроизводят на экране индикатора РЛС отраженные затененными целями сигналы, и расстояния до обнаруженных целей, корректируют дальности до обнаруженных в зоне тени целей с учетом двойного времени задержки распространения радиоволн в системе ретрансляторов, при этом сигнал обзорной радиолокационной станции имеет, по крайней мере, две несущие частоты и главные лепестки диаграммы направленности антенн ретрансляторов, излучающих принятые сигналы в сторону затененного данным препятствием участка пространства (принимающих сигналы, отраженные от цели), имеют различное направление в зависимости от частоты приходящего от обзорной радиолокационной станции сигнала. Направления на цель определяются по соотношениям отраженных от цели сигналов на разных рабочих частотах.
Предложено устройство (ретранслятор), реализующее способ определения азимутальных координат целей, находящихся в области тени, содержащее антенну, излучающую принятые сигналы в сторону затененного данным препятствием участка пространства, диаграмма направленности которой зависит от рабочей частоты излучаемого (принимаемого) сигнала.
Другое предложенное устройство (ретранслятор), реализующее способ определения азимутальных координат целей, находящихся в области тени с улучшенной помехозащищенностью, при сохранении дальности обнаружения целей и небольших массо-габаритных показателях, содержит, по крайней мере, две антенны, излучающие принятые сигналы в сторону затененного данным препятствием участка пространства, при этом сигналы от РЛС с выхода антенны, направленной на антенну РЛС, поступают на вход частотно-развязывающего устройства, разделяющего сигналы по частоте и направляющего сигнал соответствующей частоты на соответствующую антенну, излучающую принятые сигналы в сторону затененного данным препятствием участка пространства.
Сущность изобретения будет более понятна из приведенного описания и прилагаемого к нему чертежей, на которых изображено следующее:
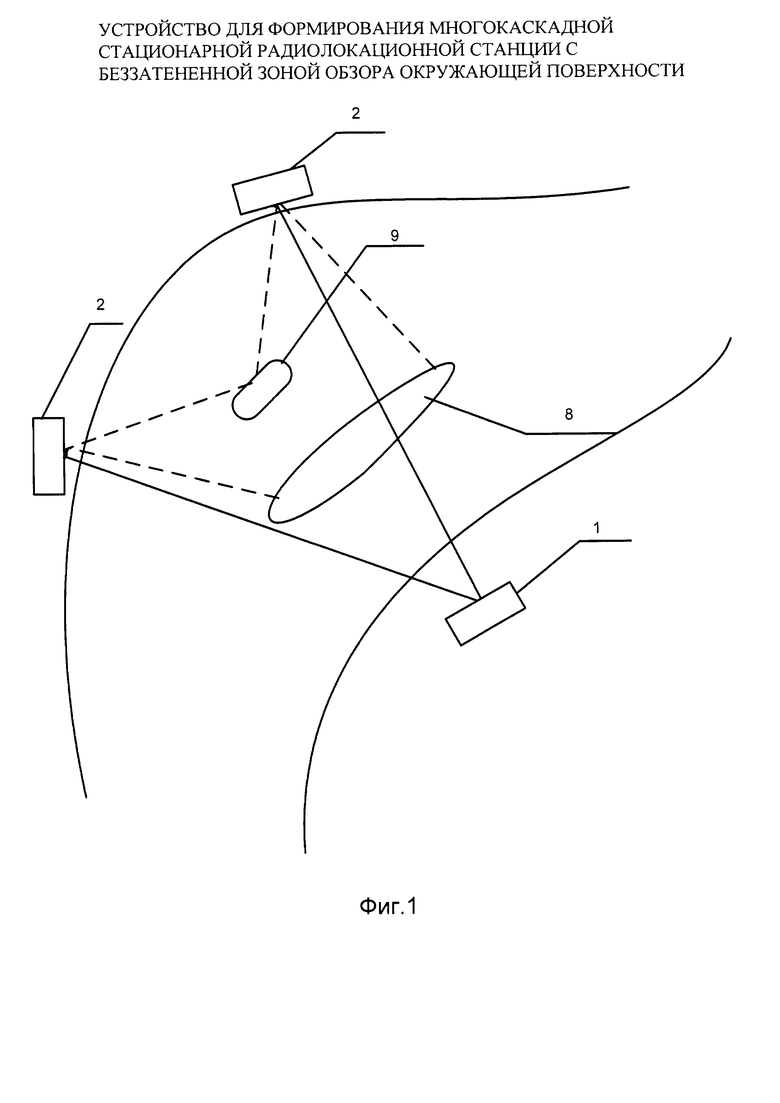
На Фиг. 1 - пример использования заявляемой многокаскадной РЛС для расширения зоны обзора речной диспетчерской системы.
На Фиг. 2 схема предлагаемого устройства ретранслятора с одной антенной, излучающей принятые сигналы в сторону затененного данным препятствием участка пространства, выполненную в виде антенны, ДН которой зависит от рабочей частоты излучаемого (принимаемого) сигнала.
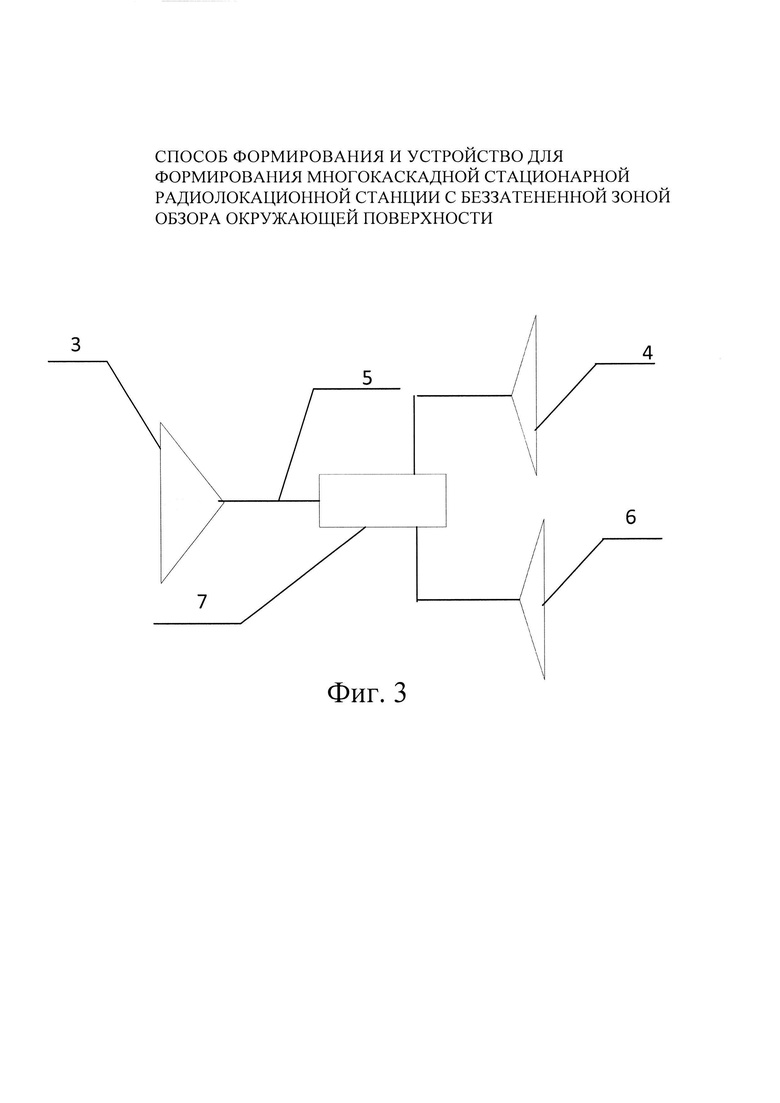
На Фиг. 3 схема предлагаемого устройства ретранслятора с двумя антеннами, излучающими принятые сигналы в сторону затененного данным препятствием участка пространства;
На чертеже и в тексте приняты следующие обозначения:
1 РЛС;
2 система ретрансляторов;
3 антенна, направленная на антенну РЛС 1;
4 антенна, направленная в сторону затененного данным препятствием участка пространства;
5 сверхвысокочастотный тракт;
6 дополнительная антенна, направленная в сторону затененного данным препятствием участка пространства;
7 частотно-разделяющее устройство;
8 препятствие (остров);
9 цель;
Устройство для формирования многокаскадной стационарной радиолокационной станции с беззатененной зоной обзора окружающей поверхности (Фиг. 1) содержит: РЛС 1, систему ретрансляторов 2.
Ретранслятор (Фиг. 2) содержит: антенны 3, 4. Антенна 3 направлена на антенну РЛС 1. Антенна 4 направлена в сторону затененного данным препятствием участка пространства. Антенны 3, 4 соединены между собой сверхвысокочастотным (СВЧ) трактом 5.
Направление главного лепестка диаграммы направленности антенны 4 зависит от рабочей частоты излучаемого (принимаемого) сигнала. Это может быть, например, антенна с частотным сканированием (антенна ЧКЛ) (Справочник по радиолокации, редактор М. Сколник пер. с английского, изд. «Советское Радио» М. 1977 т. 2 стр. 275-278).
В случае использования антенны 4, направление главного лепестка диаграммы направленности которой не зависит от рабочей частоты излучаемого (принимаемого) сигнала, необходимо применять еще, по крайней мере, одну дополнительную антенну (антенна 6). Направление излучения главного лепестка диаграммы направленности антенны 6 отлично от направления излучения главного лепестка диаграммы направленности антенны 4. Антенны 4, 6 могут быть установлены так, что главный лепесток диаграммы направленности у каждой антенны имеет свое направление (например, азимут), либо антенны 4, 6 имеют такие фазовые распределения, которые позволяют установить необходимые направления излучения главного лепестка для каждой антенны. Входы (выходы) антенн 4, 6 соединены с частотно-разделяющим устройством 7. Частотно-разделяющее устройство 7 служит для разделения сигналов по частоте, т.е. выделение сигнала с определенной частотой и направление к определенному выходу к антенне 4 или 6. Частотно-разделяющее устройство 7 также объединяет сигналы с разной частотой и направляет их к общему входу на антенну 3.
Поясним, как работает радиолокационная станция с ретрансляторами радиолокационных сигналов с использованием предложенного способа для формирования многокаскадной стационарной радиолокационной станции с беззатененной зоной обзора окружающей поверхности
Размещают обзорную стационарную радиолокационную станцию 1 (антенну) в точке на местности, обеспечивающей максимально возможный незатененный обзор окружающего пространства, и осуществляют последовательный круговой обзор. Выявляют наличие и размещение на местности (фиг. 1) относительно антенны РЛС 1 естественных препятствий, закрывающих находящееся за ними пространство и образующих зону тени (в данном случае это остров 8), закрывающий полностью суда (цель 9) для диаграммы направленности антенны РЛС 1. Размещают в точке (это может быть мыс, другой берег реки, другой остров и т.п.) систему ретрансляторов радиолокационных сигналов 2.
Рассмотрим случай использования одной частотно зависимой антенны 4. На антенну 3 ретранслятора 2 поступает сигнал от РЛС 1 (Фиг. 1 сплошная линия), далее по сверхвысокочастотному тракту 5 сигнал поступает на вход антенны 4. Так как сигнал от РЛС 1 имеет по крайней мере две несущие частоты (сигнал от РЛС 1 может состоять из двух и более последовательных импульсов разной частоты), то в сторону затененного данным препятствием (островом 8) участка пространства антенной 4, направление главного лепестка диаграммы направленности которой зависит от рабочей частоты излучаемого (принимаемого) сигнала, излучаются сигналы по крайней мере в два (по числу несущих частот) направления (пунктирные линии). Облучают ретранслированными сигналами цель 9, находящуюся в зоне тени. Отраженные находящейся в зоне тени целью 9 сигналы поступают на вход антенны 4 ретранслятора 2 (пунктирная линия), проходят по СВЧ тракту 5 и излучаются антенной 3 ретранслятора 2 в сторону РЛС 1 (сплошная линия). Отраженные закрытой целью 9 сигналы (разные по частоте) имеют разную мощность. Это объясняется тем, что направление главного лепестка диаграммы направленности антенны 4 зависит от рабочей частоты излучаемого (принимаемого) сигнала (цель находится в главном лепестке диаграммы направленности для определенной частоты, для других частот цель расположена в направлении боковых лепестков) и, следовательно, мощность сигнала облучающего цель 9 и отраженного целью 9, принятого антенной 4 зависит от рабочей частоты излучаемого (принимаемого) сигнала. Таким образом, в РЛС 1 приходят два или более (по числу несущих частот) сигнала разной мощности. По известным диаграммам направленности антенны 4 на разных рабочих частотах можно, зная отношение мощностей отраженных от цели 9 сигналов на разных рабочих частотах, определить азимутальное местоположения цели 9. С учетом дополнительного времени задержки сигнала в системе ретрансляторов 2 при его прохождении в прямом и обратном направлениях можно определить дальность обнаруженной в зоне тени цели 9. И наконец, учитывая местоположения системы ретрансляторов 2 и дальности цели, можно определить местоположение обнаруженной закрытой цели 9. Этот способ позволяет определить также еще и количество целей, что невозможно при использования способа, выбранного в качестве прототипа.
В случае использования 2-х и более частотно независимых (в пределах ^ диапазона рабочих частот РЛС 1) антенн 4, 6, сигнал от РЛС 1 через антенну 3 поступает на вход частотно-разделяющего устройства (ЧРУ) 7. Проходя через ЧРУ 7, сигнал РЛС 1, разделенный по частотам, поступает на входы антенн 4, 6. Излучение главного лепестка диаграммы направленности антенн 4, 6 происходит в разных направлениях. Отраженные находящейся в зоне тени целью 9 сигналы поступают на вход антенн 4, 6 ретранслятора 2 (пунктирная линия), далее через частотно-разделяющее устройство 7, по СВЧ тракту 5 поступают на антенну 3 ретранслятора 2 и излучаются в сторону РЛС 1 (сплошная линия). Местоположение цели 9 определяется так же, как и в случае использования одной частотно зависимой антенны 4.
При наличии в зоне тени нескольких целей, находящихся на одинаковых расстояниях от антенны РЛС, надежное определение местоположения целей по мощности отраженных от целей сигналов разных рабочих частот (по известным диаграммам направленности антенны (нескольких антенн) на разных рабочих частотах) возможно в случае, если сигнал обзорной радиолокационной станции имеет более двух несущих частот.
При использовании антенны (антенны 4), диаграмма направленности которой зависит от рабочей частоты излучаемого (принимаемого) сигнала, возможно применение только одной антенны для нескольких сигналов с разными рабочими частотами. При использовании достаточного количества сигналов с разными рабочими частотами можно обеспечить частотное сканирование (Справочник по радиолокации, редактор М. Сколник пер. с английского, изд. «Советское Радио» М. 1977 т. 2 стр. 275-278). Однако при использовании одной частотно зависимой антенны 4 при различных углах наклона фазового фронта (различных положениях главного луча диаграммы направленности) могут возникнуть большие боковые лепестки. Расчеты показывают, что при отклонении главного луча на 20 градусов в антенне, состоящей из 4 излучателей, уровень бокового лепестка составляет 8,2 дБ. Наличие боковых лепестков такого уровня приводит:
- к ухудшению помехозащищенности РЛС 1 за счет отраженного сигнала (например, от местного предмета) излученного и принятого боковым лепестком диаграммы направленности;
- к уменьшению дальности обнаружения целей, т.к. часть энергии излучается в направлении боковых лепестков.
Для уменьшения уровня боковых лепестков при отклонении главного луча необходимо увеличивать количество излучателей (апертуру антенны). Расчеты показывают, что при отклонении главного луча на 20 градусов в антенне, состоящей из 16 излучателей, уровень бокового лепестка составляет менее 29 дБ. Однако увеличение апертуры приводит к усложнению антенны и увеличению массогабаритных характеристик, к уменьшению ширины главного лепестка ДН, следовательно, уменьшению, при заданном числе рабочих частот, полосы обзора.
При использовании 2-х и более частотно независимых (в пределах диапазона рабочих частот РЛС 1) антенн увеличение боковых лепестков не происходит. Массогабаритные показатели ретранслятора в этом случае ниже, чем у ретранслятора, использующего антенну, диаграмма направленности которой зависит от рабочей частоты излучаемого (принимаемого) сигнала, так как антенны и частотно-разделяющее устройство могут быть просты по конструкции, иметь небольшой вес и размеры. Частотно-разделяющее устройство имеет, как правило, небольшие потери СВЧ сигнала, что практически не уменьшает дальность обнаружения целей.
Использование предложенного технического решения, кроме того, позволит определять местоположение нескольких находящихся в зоне тени целей, что в техническом решении, взятом за прототип, было невозможно. Разрешающая способность зависит, прежде всего, от количества сигналов с разными рабочими частотами, излучаемыми РЛС 1, ширины диаграмм направленности антенны, в случае использования одной частотно зависимой антенны, и ширины диаграмм направленности антенн и их количества в случае использовании частотно независимых антенн.
Кроме того, использование предложенного технического решения позволит применять ретрансляторы не только совместно с береговыми РЛС (для проводки судов по сложным фарватерам и т.п.), но и для расширения зоны обзора совместно с РЛС иного назначения, установленных на позициях со сложным рельефом, например в горах.

Изобретение относится к радиолокационным станциям (РЛС) освещения обстановки. Технический результат - определение количества и азимутальных координат целей, находящихся в области тени на одинаковых расстояниях от антенны РЛС. Указанный результат достигается тем, что антенну обзорной РЛС размещают в точке на местности, обеспечивающей незатененный обзор окружающего пространства, и осуществляют последовательный обзор, выявляют наличие в зоне обзора естественных препятствий, закрывающих находящееся за ними пространство, размещают на указанных препятствиях системы ретрансляторов радиолокационных сигналов, обеспечивающих прием прямых сигналов от РЛС и их трансляцию в сторону находящихся в области тени целей, а также прием отраженных целями сигналов и их ретрансляцию в сторону антенны РЛС, принимают, с использованием указанных систем ретрансляторов, излучаемые антенной РЛС прямые радиолокационные сигналы, транслируют, с усилением или без усиления, через систему ретрансляторов принятые сигналы, излучают принятые сигналы, облучают ретранслированными сигналами, находящиеся в зоне тени цели, принимают, транслируют, с усилением или без усиления, через систему ретрансляторов принятые отраженные сигналы, излучают с помощью ретрансляторов в сторону антенны РЛС переотраженные находящимися в зоне тени целями сигналы, принимают антенной РЛС, усиливают и воспроизводят на экране индикатора РЛС отраженные затененными целями сигналы и расстояния до обнаруженных целей, корректируют дальности до обнаруженных в зоне тени целей с учетом двойного времени задержки распространения радиоволн в системе ретрансляторов, при этом сигнал обзорной радиолокационной станции имеет по крайней мере две несущеие частоты, главные лепестки диаграммы направленности антенн ретрансляторов, излучающих принятые сигналы в сторону затененного данным препятствием участка пространства (принимающих сигналы, отраженные от цели), имеют различное направление в зависимости от частоты приходящего от обзорной радиолокационной станции сигнала. Направления на цель определяются по соотношениям отраженных от цели сигналов на разных рабочих частотах. Устройства, реализующие способ, выполнены определенным образом. 3 н.п. ф-лы, 3 ил.
1. Способ формирования многокаскадной стационарной радиолокационной станции с беззатененной зоной обзора окружающей поверхности, при котором размещают антенну обзорной радиолокационной станции (РЛС) в точке на местности, обеспечивающей максимально возможный незатененный обзор окружающего пространства, и осуществляют последовательный круговой обзор, выявляют наличие в зоне обзора естественных препятствий, закрывающих находящееся за ними пространство, размещают на указанных препятствиях системы ретрансляторов радиолокационных сигналов, обеспечивающих прием прямых сигналов от РЛС и их трансляцию в сторону находящихся в области тени целей, а также прием отраженных целями сигналов и их ретрансляцию в сторону антенны РЛС, принимают, с использованием указанных систем ретрансляторов, излучаемые антенной РЛС прямые радиолокационные сигналы, транслируют, с усилением или без усиления, через систему ретрансляторов принятые сигналы, излучают принятые сигналы, облучают ретранслированными сигналами, находящиеся в зоне тени цели, принимают, транслируют, с усилением или без усиления, через систему ретрансляторов принятые отраженные сигналы, излучают с помощью ретрансляторов в сторону антенны РЛС переотраженные находящимися в зоне тени целями сигналы, принимают антенной РЛС, усиливают и воспроизводят на экране индикатора РЛС отраженные затененными целями сигналы и расстояния до обнаруженных целей, корректируют дальности до обнаруженных в зоне тени целей с учетом двойного времени задержки распространения радиоволн в системе ретрансляторов, отличающийся тем, что сигнал обзорной радиолокационной станции имеет по крайней мере две несущие частоты, главные лепестки диаграммы направленности антенн ретрансляторов, излучающих принятые сигналы в сторону затененного данным препятствием участка пространства, имеют различное направление в зависимости от частоты приходящего от обзорной радиолокационной станции сигнала, направления на цель определяются по отношению отраженных от цели сигналов на разных рабочих частотах.
2. Устройство, реализующее способ по п. 1, включающее обзорную радиолокационную станцию, сигнал которой имеет по крайней мере две несущие частоты с антенной, установленной на местности в точке, обеспечивающей обзор максимально возможной площади окружающего пространства, ретрансляторы, причем каждый ретранслятор имеет антенну, направленную на антенну РЛС, и антенну, направленную в сторону находящихся в области тени целей, отличающееся тем, что антенна, излучающая принятые сигналы в сторону затененного данным препятствием участка пространства, имеет диаграмму направленности, зависящую от рабочей частоты сигнала РЛС.
3. Устройство, реализующее способ по п. 1, включающее обзорную радиолокационную станцию, сигнал которой имеет по крайней мере две несущие частоты, с антенной, установленной на местности в точке, обеспечивающей обзор максимально возможной площади окружающего пространства, ретрансляторы, причем каждый ретранслятор имеет антенну, направленную на антенну РЛС, отличающееся тем, что ретранслятор содержит по крайней мере две антенны, излучающие принятые сигналы в сторону затененного данным препятствием участка пространства, при этом сигналы от РЛС с антенны, направленной на антенну РЛС, поступают на вход частотно-развязывающего устройства, разделяющего сигналы по частоте и направляющего на соответствующую антенну, излучающую принятые сигналы в сторону затененного данным препятствием участка пространства.
| СПОСОБ ФОРМИРОВАНИЯ И УСТРОЙСТВО МНОГОКАСКАДНОЙ СТАЦИОНАРНОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ С БЕЗЗАТЕНЕННОЙ ЗОНОЙ ОБЗОРА ОКРУЖАЮЩЕЙ ПОВЕРХНОСТИ | 2001 |
|
RU2206904C2 |
| СПОСОБ РАДИОЛОКАЦИОННОГО ОБНАРУЖЕНИЯ ЦЕЛЕЙ И КОМПЛЕКС ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2013 |
|
RU2524923C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ЦЕЛЕЙ И КОМПЛЕКС ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2013 |
|
RU2538105C2 |
| US 6014099 A, 11.01.2000 | |||
| JP 9178842 A, 11.07.1997 | |||
| EP 1681581 A1, 0.07.2006 | |||
| WO 2008094293 A2, 07.08.2008. | |||

