Изобретение относиться к области регулирования движения дорожного транспорта, а именно к системам и способам определения нарушений правил дорожного движения, и может быть использовано для фото- и видеофиксации нарушений правил дорожного движения.
Из уровня техники известен способ наблюдения объектов с дистанционно пилотируемого летательного аппарата по патенту РФ №2279999 (приоритет от 30.12.2003 МПК B64D 47/08), заключающийся в том, что наблюдение осуществляют с помощью кадровой обзорной системы, состоящей из нескольких телевизионных и/или инфракрасных камер, наблюдаемое изображение передают с борта дистанционного пилотируемого летательного аппарата в текущем времени, осуществляют поиск, обнаружение и распознавание объектов. В процессе наблюдения переключают камеры кадровой обзорной системы с различными полями зрения, при этом камеры кадровой обзорной системы используют с неколлинеарными, расположенными в вертикальной плоскости оптическими осями, управляют летательным аппаратом по курсу, удерживая изображение объекта на вертикальной средней линии кадра. Оптические оси камер обзорной кадровой системы жестко зафиксированы в плоскости вертикальной симметрии летательного аппарата и ориентированы вниз и вперед под различными углами от 0 до 90° к вертикальной оси летательного аппарата. Переключение камер осуществляют при переходе изображения объекта из поля зрения одной камеры в поле зрения последующей камеры, имеющие различную ширину, причем камеры с более пологой ориентацией оптических осей имеют равную или большую ширину поля зрения, чем камеры с менее пологой ориентацией. При попадании изображения объекта в поле зрения камеры с наиболее узким полем зрения запоминают кадр, после чего по положению изображения объекта в запомненном кадре, координатам и углам ориентации дистанционно пилотируемого летательного аппарата вычисляют координаты объекта.
Недостатками данного изобретения являются:
1. Использование кадровой обзорной системы, состоящей из нескольких телевизионных и/или инфракрасных камер с различными полями зрения, что приводит к использованию большого количества различного оборудования и необходимости использования дистанционно пилотируемых аппаратов большой грузоподъемности;
2. Сложное управление летательным аппаратом, чтобы изображение объекта всегда было на вертикальной средней линии кадра;
3. Оптические оси камер жестко зафиксированы в плоскости вертикальной симметрии летательного аппарата.
4. Сложная система расчета координат объекта наблюдения.
5. Отсутствие возможности сохранения фото- и видеоматериалов.
6. Отсутствие системы стабилизации видеооборудования, как следствие все колебания летательного аппарата будут отражаться на качестве изображения.
7. Отсутствие возможности использования изобретения для контроля соблюдения правил дорожного движения.
Так же из уровня техники известен беспилотный летательный аппарат для видеонаблюдения и способ его управления и передачи данных по заявке на изобретение РФ №2005130270 (дата подачи 28.09.2005, МПК В64В 1/00), заключающийся в том, что управление и передачу данных видеонаблюдения осуществляют по каналу сотовой связи посредством компьютера через терминал, передающий сигнал на приемопередающую станцию, распределяют коммутатором и через приемопередающую станцию подают на терминал, и далее на трал и исполнительные цепи, которые управляют механизмами поворота руля направления, двигателей и руля высоты, механизмом управления видеокамерой, включением, выключением и регулированием числа оборотов двигателя. Посредством системы глобального позиционирования определяют координаты места нахождения беспилотного летательного аппарата, для чего сигнал с купольной видеокамеры через трал, первый терминал подают на приемопередающую станцию, распределяют коммутатором и посредством Интернета выводят на компьютер или через приемопередающую станцию сигнал подают на второй терминал и выводят на компьютер.
Недостатками данной заявки являются сложная система управления беспилотным летательным аппаратом (далее БЛА), сложная система передачи данных, отсутствие возможности хранения отснятых фото- и видеоматериалов, отсутствие бортовой автономной системы управления и как следствие управление полетом должен осуществлять оператор БЛА, отсутствует возможность использования изобретения для контроля за соблюдением ПДД.
Наиболее близким к заявляемому изобретению является способ формирования схемы дорожно-транспортного происшествия по патенту РФ №2637067 (приоритет от 15.0.2016, МПК B62D 41/00), заключающийся в том, что после получения информации о ДТП, по любым доступным каналам связи, заносят информацию в базу данных и одновременно производят старт беспилотного летательного аппарата с координатами ДТП и данными маршрута беспилотного летательного аппарата, который оснащают модулем ГЛОНАСС/GPS, программным обеспечением, формирующим в направленном автоматическом режиме заданный маршрут по координатам ДТП. И фото-видео камерой высокого разрешения с возможностью получения масштабируемых снимков по заданным координатам места ДТП с высоты 10-50 м. Процесс полета к месту ДТП и фото-видео фиксацию места ДТП контролируют при помощи обратной связи, осуществляющуюся беспроводным устройством передачи фото и видео изображений. Данный фотосъемки с беспилотного летательного аппарата передают на центральный пункт обработки информации, где с помощью программного обеспечения производят обработку поступивших данных, пополняя базу данных переделанной с БЛА информацией с места ДТП, по которой формируют схему дорожно-транспортного происшествия. В ночное время суток БЛА оснащают фото-видео камерой высокого разрешения с источником инфракрасного излучения.
Недостатками данного изобретения являются:
1. Использование БЛА только для составления схемы ДТП.
2. Вылет БЛА осуществляется по факту совершенного ДТП.
3. Необходимость участия оператора для контроля полета БЛА.
4. Отсутствие возможности использования изобретения для контроля соблюдения выполнения ПДД.
Задачей изобретения является разработка способа фото- и видеофиксации нарушений правил дорожного движения в режиме реального времени с помощью беспилотного летательного аппарата с участием и/или без участия человека.
Техническим результатом заявляемого изобретения является возможность контроля за дорожным движением одного и/или группы транспортных средств на любом участке дороги в режиме реального времени вне зависимости от рельефа местности и времени суток с последующей фото- и видеофиксацией нарушений нескольких пунктов правил дорожного движения одновременно.
Технический результат достигается тем, что фото- и видеофиксация осуществляется с помощью, по меньшей мере, одного беспилотного летательного аппарата с установленными на нем, по меньшей мере, одной видеокамерой с возможностью использования ИК подсветки, по меньшей мере, одним устройством стабилизации видеокамеры, ГЛОНАСС/GPS-приемником, по меньшей мере, одним устройством беспроводной передачи данных, передающего фото- и видеоматериалы на электронно-вычислительное устройство наземной станцией управления с предустановленным специальным программным обеспечением (далее СПО), проводящим анализ полученных фото- и видеоматериалов и установление факта нарушения ПДД с распознаванием переднего или заднего государственного регистрационного знака транспортного средства и оформлением квитанции для оплаты штрафа.
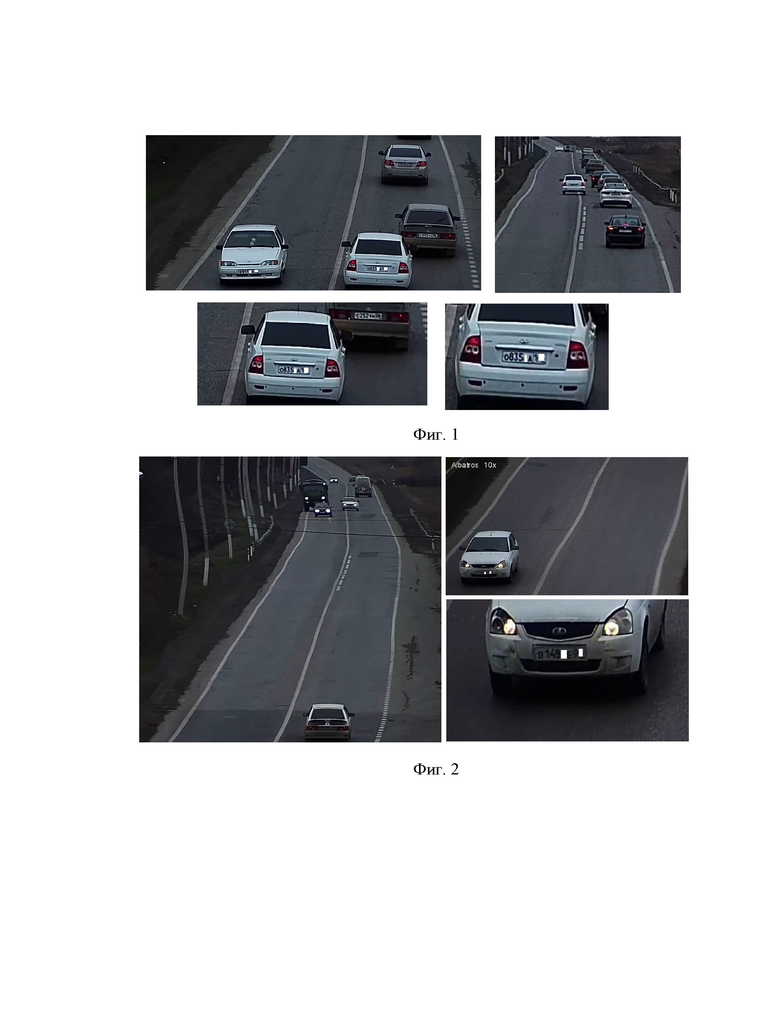
На фиг.1 представлена фотофиксация нарушения, предусмотренного ст. 12.16 КоАП РФ, с одновременным распознаванием заднего ГРЗ транспортного средства
На фиг.2 представлена фотофиксация нарушения, предусмотренного ст. 12.16 КоАП РФ, с одновременным распознаванием переднего ГРЗ транспортного средства
Способ может быть осуществлен двумя вариантами.
Вариант 1. В специальном программном обеспечении электронно-вычислительного устройства наземного центра управления создается полетное задание, в котором задаются географические координаты и азимут, по меньшей мере, одной точки контроля, составляющие маршрут облета контролируемой территории, высоту полета, времени нахождения в точках контроля для БЛА вертолетного, мультироторного и/или смешанного типа. Беспилотные летательные аппараты самолетного типа, не имеющие программно-конструктивной возможности находиться в одной контрольной точке определенное время, передвигаются по маршруту облета непрерывно, или выстраивая вокруг целевой точки траекторию круг или восьмерку.
Полетное задание по радиоканалу через устройство беспроводной передачи данных поступает в полетный контроллер БЛА. Вылет и выполнение полетного задания происходит в автоматическом режиме без участия человека, при этом реализована возможность частичного или полного перехода на ручное управление полетом.
Обратно в наземный центр управления полетами в режиме реального времени с БЛА передаются данные телеметрии: текущие координаты местонахождения, азимут, высота и скорость полета, данные о состоянии беспилотного летательного аппарата.
По прибытию к месту назначения беспилотный летательный аппарат зависает в заданной точке на указанной в полетном задании высоте (для вертолетного, мультироторного и/или смешенного типа) или облетает заданную территорию в соответствии с полетным заданием (для любого типа БЛА).
Полученные при выполнении полетного задания, фото-, видеоматериалы проецируются через линзовую систему – объектив – на матрицу, где преобразуются в электрический сигнал и по сети Ethernet поступают в электронно-вычислительное устройство полетного контроллера беспилотного летательного аппарата. Одновременно в электронно-вычислительное устройство полетного контроллера беспилотного летательного аппарата по сети Ethernet поступают географические координаты по данным ГЛАНАСС/GPS- приемника. Полученные фото-. Видео материалы, а также географические координаты из электронно-вычислительного устройства полетного контроллера БЛА через устройство беспроводной передачи данных по радиоканалу поступают в электронно-вычислительное устройство наземного центра управления, где с помощью специального программного обеспечения производиться анализ фото- и видеоматериалов на предмет нарушения ст. 12 КоАП РФ «Административные правонарушения в области дорожного движения» с распознаванием передних и задних ГРЗ транспортного средства и последующем оформлением доказательной базы и квитанции для оплаты штрафа.
Доказательная база содержит файл видеозаписи факта нарушения ПДД, фото материалы, в том числе распознанный передний и/или задний государственный регистрационный номер транспортного средства, с указанием времени и географических координат места нарушения.
Вариант 2. Способ фото-, видеофиксации нарушения ПДД с помощью БЛА, отличающийся от варианта 1 тем, что полученные при выполнении полетного задания фото-, видеоматериалы проецируются через линзовую систему – объектив – на матрицу, где преобразуются в электрический сигнал и по сети Ethernet поступают в электронно-вычислительное устройство полетного контроллера беспилотного летательного аппарата. Одновременно в электронно-вычислительное устройство полетного контроллера беспилотного летательного аппарата по сети Ethernet поступают географические координаты по данным ГЛАНАСС/GPS- приемника. В электронно-вычислительном устройстве полетного контроллера БЛА с помощью специального программного обеспечения производиться анализ фото- и видеоматериалов на предмет нарушения ст. 12 КоАП РФ «Административные правонарушения в области дорожного движения» с распознаванием передних и задних ГРЗ транспортного средства и последующем оформлением доказательной базы и квитанции для оплаты штрафа.
Доказательная база содержит файл видеозаписи факта нарушения ПДД, фото материалы, в том числе распознанный передний и/или задний государственный регистрационный номер транспортного средства, с указанием времени и географических координат места нарушения.
Доказательная база и квитанция для оплаты штрафа поступают в удаленный Центр обработки информации.
Преимуществами заявляемого изобретения являются:
1. Исключение человеческого фактора при определении факта нарушения ПДД;
2. Возможность контролирования любых участков дорог, независимо от геологического рельефа местности;
3. Возможность фиксации нарушений группы транспортных средств;
4. Возможность фиксации нескольких нарушений одновременно;
5. Сложность обнаружения беспилотного летательного аппарата водителем;
6. Отсутствие необходимости расположения оборудования вблизи дороги;
7. Мобильное исполнение системы видеоконтроля соблюдения ПДД.
8. Дальность расстояния между оператором и БЛА зависит только от технических особенностей используемой аппаратуры.
Использование заявляемого способа позволяет контролировать дорожное движение одного и/или группы транспортных средства на любом участке дороги в режиме реального времени вне зависимости от рельефа местности и времени суток с последующей фото- и видеофиксацией нарушений нескольких пунктов ПДД одновременно.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система фото-, видеофиксации нарушений правил дорожного движения и способ её работы | 2018 |
|
RU2711825C2 |
| Система видеофиксации нарушений правил дорожного движения на перекрестке и способ ее работы | 2017 |
|
RU2668878C1 |
| Система автоматической видеофиксации дорожно-транспортных происшествий на перекрестке | 2021 |
|
RU2769832C1 |
| Система определения скорости транспортного средства на участке | 2020 |
|
RU2733638C1 |
| УСТРОЙСТВО И СИСТЕМА КОНТРОЛЯ ДВИЖЕНИЯ ТРАНСПОРТНЫХ СРЕДСТВ | 2019 |
|
RU2736930C1 |
| УСТРОЙСТВО И СИСТЕМА РЕГИСТРАЦИИ ОБЪЕКТОВ В ОБЛАСТИ АВТОДОРОГИ | 2021 |
|
RU2770145C1 |
| СПОСОБ УПРАВЛЕНИЯ ДРОНОМ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2019 |
|
RU2709562C1 |
| Система для выявления нарушений правил дорожного движения | 2021 |
|
RU2778165C1 |
| АДАПТЕР И СИСТЕМА РАЗМЕЩЕНИЯ И ДОСТАВКИ ГРУЗА БЕСПИЛОТНЫМИ ЛЕТАТЕЛЬНЫМИ АППАРАТАМИ | 2020 |
|
RU2739508C1 |
| АЭРОМОБИЛЬНЫЙ КОМПЛЕКС С БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ ВЕРТОЛЕТНОГО ТИПА | 2022 |
|
RU2792314C1 |
Изобретение относиться к способам определения нарушений правил дорожного движения (ПДД), используется для фото- и видеофиксации нарушений ПДД. Фото- и видеофиксация нарушений ПДД осуществляется видеокамерой, установленной на платформе беспилотного летательного аппарата (БЛА). Материалы в режиме реального времени по сети Ethernet поступают в электронно-вычислительное устройство полетного контроллера БЛА. Поступившие материалы анализируются на предмет нарушения. При обнаружении состава нарушения формируется доказательная база. Полет БЛА осуществляется в автоматическом режиме. По радиоканалу через средства беспроводной передачи данных в центр управления полетами в режиме реального времени с БЛА передаются текущие координаты местонахождения, данные о состоянии БЛА. При достижении места назначения БЛА зависает в заданной точке и осуществляет фото- и видеоконтроль с последующей фиксацией нарушения ПДД. Обеспечивается возможность контроля за дорожным движением транспортных средств на любом участке дороги, в любое время суток в режиме реального времени с последующей фиксацией нарушений нескольких пунктов ПДД одновременно. 5 з.п. ф-лы, 2 ил.
1. Способ видеофиксации нарушения правил дорожного движения с помощью беспилотного летательного аппарата, отличающийся тем, что фото- и видеофиксация нарушений ПДД транспортными средствами осуществляется видеокамерой высокого разрешения, установленной на гиростабилизированной платформе беспилотного летательного аппарата, при этом
фото-, видеоматериалы в режиме реального времени проецируются через линзовую систему – объектив – на матрицу, где преобразуются в электрический сигнал и по сети Ethernet поступают в электронно-вычислительное устройство полетного контроллера БЛА;
в электронно-вычислительном устройстве полетного контроллера БЛА с помощью специального программного обеспечения анализируются фото-, видеоматериалы на предмет нарушения правил дорожного движения;
при обнаружении на фото-, видеоматериалах состава нарушения правил дорожного движения специальным программным обеспечением вычислительного устройства полетного контроллера БЛА формируется доказательная база, включающая файл видеозаписи нарушения ПДД, фотоматериалы, в том числе распознанный передний и/или задний государственный регистрационный номер транспортного средства, с указанием времени и географических координат места нарушения, и поступающей в удаленный Центр обработки информации;
при этом полет беспилотного летательного аппарата осуществляется в автоматическом режиме без участия человека согласно полетному заданию, созданному в специальном программном обеспечении электронно-вычислительной машины наземного центра управления, с заданными географическими координатами и азимутом, по меньшей мере, одной точки контроля, высотой полета и временем нахождения в точке контроля, и поступающего в полетный контроллер беспилотного летательного аппарата по радиоканалу по средствам устройства беспроводной передачи данных;
при этом по радиоканалу через средства беспроводной передачи данных в центр управления полетами в режиме реального времени с БЛА передаются текущие координаты местонахождения, азимут, высота и скорость полета, данные о состоянии беспилотного летательного аппарата;
при достижении места назначения беспилотный летательный аппарат вертолетного, мультироторного и/или смешенного типа зависает в заданной точке на указанной в полетном задании высоте и осуществляет фото-, видеоконтроль с последующей фото-, видеофиксацией нарушения правил дорожного движения.
2. Способ по п.1, отличающийся тем, что фото-, видеоматериалы в режиме реального времени по радиоканалу через устройство беспроводной передачи данных передаются с БЛА в электронно-вычислительную машину наземного центра управления, а затем с помощью специального программного обеспечения наземного центра управления анализируются на предмет выявления нарушений ПДД, распознавание передних и задних ГРЗ ТС, с последующим формированием доказательной базы и квитанций для оплаты штрафа.
3. Способ по п.1, отличающийся тем, что географические координаты определяются по данным ГЛАНАСС/GPS - приемника БЛА и по сети Ethernet поступают в электронно-вычислительное устройство полетного контроллера беспилотного летательного аппарата.
4. Способ по п.1, отличающийся тем, что видеокамера может быть дополнительно снабжена ИК-подсветкой для использования в темное время суток.
5. Способ по п. 1, отличающийся тем, что реализована возможность частичного или полного перехода на ручное управление беспилотным летательным аппаратом.
6. Способ по п.1, отличающийся тем, что при использовании для осуществления данного способа БЛА вертолетного, мультироторного, смешенного и/или самолетного типа по прибытии к месту назначения облетает заданную территорию в соответствии с полетным заданием.
| US 9070289 B2, 30.06.2015 | |||
| WO 2015089600, 25.06.2015 | |||
| СПОСОБ ФОРМИРОВАНИЯ СХЕМЫ ДОРОЖНОГО-ТРАНСПОРТНОГО ПРОИСШЕСТВИЯ | 2016 |
|
RU2637067C2 |
| СПОСОБ ПОЛУЧЕНИЯ ФОСФОРСОДЕРЖАЩИХ | 0 |
|
SU164432A1 |
| Способ выделения мылонафта | 1929 |
|
SU20239A1 |
| RU 2016114170 A, 18.10.2017 | |||
| Способ формования заготовок головных уборов и пресс для осуществления этого способа | 1956 |
|
SU107380A1 |
| Способ получения бензополикарбоновых кислот и щавелевой кислоты | 1960 |
|
SU134684A1 |

