Изобретение относится к складской системе с по меньшей мере одним стеллажом, включающим группу расположенных друг над другом полок, при этом каждая полка логически разделена на несколько располагающихся рядом отделений. Дополнительно изобретение относится к способу организации такой складской системы.
Для соответствия современным и, тем самым, строгим требованиям логистики сегодня необходимо использовать в качестве складского оборудования интеллектуальные устройства и внедрять их в высокоуровневые комплексные системы.
В целом, уже известны некоторые попытки создания автоматизированных складских систем с автоматическими регистрирующими устройствами.
В DE10 2007 017 207 А1 описывается датчик, распознающий наличие объектов, и при этом раскрывается выдвижной ящик с одной стандартизованной деталью из вспененного материала и углублениями для размещения инструментов. В основании углубления находится датчик, выполненный в виде фотоэлектрического барьера и включающий источник света и расположенный в непосредственной близости приемник. В зависимости от того, находится ли инструмент в углублении, испускаемый свет отражается или не отражается, в результате чего приемник подает сигнал лишь при наличии инструмента в углублении.
В DE 197 14 799 С2 описывается устройство для хранения единиц товара с использованием матрицы датчиков на стеллаже для продукции и соответствующих сигнальных линий, при этом эти сигнальные линии сформированы в области стеллажа полосой печатной платы, на которой также установлены датчики, при этом эти датчики представляют собой датчики давления, емкостные/индуктивные датчики или механические выключатели.
В ЕР 1 217345 А1 представлена система контроля потока товаров с разными артикулами от нескольких поставщиков к одному месту использования, при этом в этом месте использования предусмотрен склад, автоматически регистрирующий необходимость пополнения стеллажа.
В DE 698 27 454 Т2 представлен способ организации работы склада с несколькими емкостями с автоматической активацией пополнения.
В DE 20 2014 004 232 U1 описывается торговый стенд для самостоятельного отбора хлебобулочных изделий. Данный торговый стенд включает одно отделение с запасом продукции и по меньшей мере один фотоэлектрический барьер. Это позволяет регистрировать уровень заполнения отделения с запасом продукции в зоне размещения фотоэлектрического барьера.
В ЕР 2 178 035 А1 раскрывается способ и устройство для измерения пустого пространства в складских или грузовых отделениях. При этом складское или грузовое отделение разделяется на несколько частей. В этих частях выполняется измерение расстояний. Результаты измерения передаются в центральную систему. Центральная система может обрабатывать результаты измерения, на основании чего имеется возможность получения информации о наличии объектов в складском или транспортном отделениях.
WO 2005/088494 А1 относится к складской системе с по меньшей мере одним гнездом для хранения объектов. Данная складская система включает гравиметрический чувствительный элемент для регистрации наличия объектов. Складская система может включать дополнительные типы датчиков для регистрации наличия объектов.
В DE 10 2004 035 819 А1 раскрывается способ автоматического распознавания складируемых грузов на стеллаже для продукции. При этом на каждом отдельном предмете, размещенном на стеллаже для продукции, имеется транспондер. Транспондер передает относящиеся к объекту данные в считывающее устройство, которые анализирует вычислительная машина системы управления складом.
Кроме того, известны другие решения, определяющие с помощью датчиков усилия, например, весоизмерительных датчиков или пленочных тензодатчиков, вес и, тем самым, наличие объектов. Известны оптические системы, получающие с помощью камер изображение, которое анализируется на предмет наличия каких-либо объектов.
Задачей настоящего изобретения является создание улучшенной складской системы, а также способ организации и эксплуатации такой складской системы, позволяющий улучшить складскую систему.
Каждая из лежащих в основе данного изобретения задач решается с использованием признаков из независимых пунктов формулы изобретения. Варианты осуществления изобретения описаны в зависимых пунктах формулы изобретения.
Варианты осуществления изобретения являются наиболее предпочтительными, так как обеспечивают возможность автоматической регистрации остатка в конкретных отделениях складской системы. Если информация о наличии соответствует состоянию с малым остатком в отделении, то устройство связи или сервер имеет возможность дозаказа соответствующего предмета. Впоследствии эти предметы могут быть рассортированы по соответствующим отделениям, при этом группы датчиков позволяют регистрировать новые единицы. Это упрощает управление складским хозяйством. Кроме того, информация о наличии может быть затребована, например, через устройство связи или сервер, благодаря чему имеется возможность дистанционного запроса касательно наличия достаточного запаса отдельных предметов в отделениях.
В соответствии с вариантами осуществления изобретения предусматривается складская система с по меньшей мере одним стеллажом, включающим группу расположенных друг над другом полок. Каждая полка логически разделена на несколько расположенных рядом отделений, при этом каждому отделению присваивается уникальный адрес. Дополнительно складская система включает систему датчиков для определения наличия объектов, при этом эта система датчиков предназначена для сканирования пространства на предмет загрузки одного из отделений с целью получения информации о наличии в нем объектов, соответствующей степени занятости конкретного отделения, а также включает шину передачи данных, соединенную с системой датчиков и устройством связи. Складская система предназначается для реализации следующих этапов:
- получение системой датчиков информации о наличии объектов в отделениях;
- передача информации о наличии объектов с указанием адреса, присвоенного анализируемому отделению, от системы датчиков к устройству связи через шину данных;
- создание устройством связи сетевого подключения с целью одно- или двунаправленной передачи информации о наличии объектов - серверу или используемой для управления информации - складской системе.
Стеллаж может представлять собой стеллаж с наклонными полками, а наклон полок может быть направлен в сторону отбора объектов со стеллажа. Наклон полок стеллажа направлен в сторону пополнения или, соответственно, отбора объектов, благодаря чему хранящиеся в отделениях предметы путем соскальзывания в сторону отбора автоматически пополняются после извлечения одного такого предмета. Таким образом, предметы прилегают друг к другу без пропусков. Применение системы датчиков в таких стеллажах с наклонными полками является наиболее предпочтительным, так как определение остатка возможно с помощью небольшого количества датчиков ввиду отсутствия в соответствующих случаях необходимости регистрации наличия свободного пространства между предметами. Требуется только определить позицию последнего предмета. Если известны длина отдельных предметов или, соответственно, количество предметов на единицу длины, то может быть рассчитано количество предметов в соответствующем отделении. Например, длина отдельных предметов может быть уже известной или она может быть определена и сохранена в процессе наладки системы стеллажей. Если известна позиция последнего предмета при загрузке минимального количества, то для проверки наличия минимального количества соответствующих предметов, к примеру, достаточно запрашивать информацию только у чувствительного элемента, назначенного для этой позиции. К примеру, в рамках наладки системы стеллажей может осуществляться загрузка минимального количества объектов с последующим определением позиции последнего датчика, показывающего наличие, либо, соответственно, позиции первого чувствительного элемента, показывающего отсутствие.
Система датчиков включает, например, несколько групп датчиков и каждая группа закреплена за одним из отделений, при этом сама группа датчиков включает определенное количество чувствительных элементов, расположенных в продольном направлении относительно группы. Закрепление групп датчиков за отделениями может упростить управление или, соответственно, наладку складской системы. Расположенные в продольном направлении чувствительные элементы могут размещаться вдоль отделения, у стеллажа с наклонными полками, например, в направлении отбора, что обеспечивает простую регистрацию остатка в отделении.
В частности, каждая группа датчиков может быть точно и однозначно закреплена за одним отделением, а продольное направление группы датчиков соответствует направлению наклона отделений.
Группа датчиков может включать гибкую или жесткую печатную плату в форме полосы в качестве основания. Печатная плата может быть адаптирована к соответствующему отделению по форме или, соответственно, геометрическим параметрам.
Группа датчиков может быть закреплена на нижней стороне полки стеллажа, частью которой является закрепленное за соответствующей группой датчиков отделение. Это позволяет экономить место при размещении группы датчиков.
Дополнительно складская система может включать управляющую электронику для каждой группы датчиков, при этом управляющая электроника предназначена для соединения группы датчиков с шиной передачи данных, а также для присвоения адреса отделению и предоставления шине данных информации о наличии в нем объектов.
Каждому отделению четко назначено, например, по меньшей мере одно оптическое средство сигнализации, при этом оптическое средство сигнализации соединено с шиной данных, что позволяет получать по ней сигнал для оптического указания на отделение и реализовать систему оптической индикации. Средство сигнализации может указывать, например, на отделение, которое необходимо пополнить.
Конфигурация складской системы может быть настроена на сохранение времени инвентаризации, и при наступлении установленного времени инвентаризации выполняется автоматическая инвентаризация. В зависимости от размера складской системы определение остатка во всех отделениях может выполняться в течение определенного времени, при этом может потребоваться, чтобы в процессе определения остатка изъять или добавить предмет было невозможно. Время проведения инвентаризации может быть назначено на период, когда изъятия или добавления предметов в складскую систему не происходит, например, в ночное время.
В устройстве связи сохранена, например, схема раскладки, по которой производится назначение типов предметов для одного или нескольких адресов или, соответственно, отделений, а также пороговое значение для остатка предметов каждого типа. Конфигурация устройства связи может быть настроена так, что на основе информации о наличии, полученной по шине данных, и присвоенных в каждом случае адресов определяется хранящееся в складской системе количество предметов каждого типа, найденное количество предметов каждого типа сравнивается с пороговым значением количества, установленного для данного типа предметов, и если обнаруженное количество предметов данного типа меньше установленного для них порогового значения, может отправляться соответствующий сигнал. Благодаря этому может быть обеспечено постоянное наличие достаточного количества хранящихся в отделениях предметов.
Согласно вариантам осуществления изобретения на устройстве связи может быть установлен программный модуль дистанционного обслуживания, доступ к которому может осуществляться по сети и который позволяет выполнять операции обслуживания непосредственно на складской системе. Конфигурация программного модуля дистанционного обслуживания может быть настроена таким образом, что по полученной по сети команде имеется возможность определенного воздействия на систему датчиков, в результате чего осуществляется получение информации о наличии предметов в отделении, адрес которого был указан в команде, а на основе этой информации генерируется сигнал о наличии, отправляемый по сети.
Устройство связи может осуществлять динамическую запись информации о наличии предметов в складской системе, благодаря чему в случае отказа системы эта информация может быть восстановлена в любой момент и использована снова при следующем возврате системы в рабочее состояние.
Устройство связи предназначено, например, для подключения компьютера с помощью локального соединения с целью последующей визуализации сохраненной в устройстве связи схемы раскладки посредством пользовательского интерфейса на компьютере.
Устройство связи может иметь режим наладки, при этом зарегистрированное в режиме наладки с помощью системы датчиков состояние загрузки складской системы может быть сохранено как схема раскладки, в которой содержится информация, согласно зарегистрированному системой датчиков состоянию загрузки, в частности, о типе предметов, назначенных для каждого отделения, и о пороговом значении загрузки, присвоенном для каждого типа предметов.
Дополнительно складская система может включать ручной сканер для оптической регистрации считываемого оптическим способом кода, при этом каждому отделению присваивается оптически считываемый код, содержащий информацию о соответствующем адресе отделения, при этом конфигурация устройства связи настроена таким образом, что назначение типа предмета для одного или нескольких отделений происходит путем получения устройством связи адреса, оптически считанного с помощью ручного сканера, и информации о типе предмета, назначенного для оптически считанного адреса.
Например, в ручном сканере используется беспроводная система связи, он включает беспроводной интерфейс связи для обмена данными с устройством связи.
В каждом отделении система датчиков может включать группу датчиков, выполненную в виде гибкой печатной платы, имеющей форму полосы.
Каждая из групп датчиков может быть закреплена на нижней стороне полки стеллажа, так что источники сигнала одной из групп датчиков могут передавать сигнал в направлении верхней стороны полки, расположенной, соответственно, этажом ниже, а приемники сигнала одной из групп датчиков могут принимать сигнал, соответственно, от расположенной этажом выше полки через отверстия в этих полках. Таким образом, для установки группы источников сигнала, а также группы приемников сигнала, в каждом случае требуется установка только одной группы датчиков. Тем самым, снижаются затраты на установку и уменьшается монтажная высота всей группы датчиков. Таким образом, сигнал от источника к приемнику проходит в направлении сверху вниз. Однако направление сигнала может быть и снизу вверх, для этого приемники сигнала располагаются на верхней стороне отделения, а источники сигнала - на нижней стороне отделения.
Источники сигнала и приемники сигнала группы датчиков могут быть размещены на печатной плате попарно, так что отправленный источником сигнал может быть принят приемником той же пары. Это упрощает прием сигнала, отправленного источником, приемником, так как расстояние между приемником и источником более короткое или, соответственно, сигналу не приходится пересекать пространство установки отделения. В частности, можно использовать более слабый сигнал, что снизит опасность его взаимодействия с сигналами соседних источников. Еще одно преимущество заключается в отсутствии необходимости во взаимном согласовании приемника и источника сигнала в отделении. Это согласование производится уже за счет самого размещения на печатной плате. Благодаря этому возможен больший допуск на изготовление полки, так как взаимное выравнивание полок стеллажа или, соответственно, групп датчиков на полках не требуется.
Например, источники и приемники сигнала одной группы датчиков могут быть расположены попарно на одной и той же печатной плате, в частности, непосредственно рядом друг с другом, при этом размещенные попарно источники и приемники сигнала закреплены за соответствующим отверстием в полке стеллажа, благодаря чему отправляемый одним из источников сигнал может быть передан через это отверстие и принят приемником сигнала из той же пары.
В частности, приемники и источники сигнала могут располагаться на печатной плате рядом. Например, приемник сигнала имеет форму кольца и расположен вокруг источника сигнала, благодаря чему подаваемый передатчиком сигнал может быть принят вне зависимости от направления излучения.
Источники сигнала, приемники сигнала и/или токопроводящие дорожки для коммутации источников и приемников сигнала напечатаны, например, вместе с шиной данных на печатной плате.
Полки стеллажа могут включать в направлении загрузки отделений, в частности, в направлении наклона, несколько отверстий для приема и/или передачи сигналов системой датчиков, при этом группы датчиков системы датчиков расположены под полками стеллажей и покрыты пленкой, нанесенной в направлении загрузки на верхнюю сторону полки и перекрывающей отверстия. Пленка обеспечивает защиту группы датчиков от загрязнения и дополнительно формирует ровную поверхность на полке стеллажа. Благодаря ровной пленке, например, на наклонных полках стеллажа может быть образована поверхность скольжения, способствующая перемещению предметов в пределах одного отделения.
Пленкой может быть пленка из полимерного материала, в частности, пленка из ПВХ, при этом эта полимерная пленка не создает препятствий в диапазоне частот приема и/или передачи сигнала.
Согласно вариантам осуществления изобретения дополнительно предусмотрен способ организации складской системы со следующими этапами:
- переключение устройства связи в режим наладки;
- загрузка в отделения складской системы минимального количества предметов, при недостижении которого должен производиться дозаказ этих предметов, согласно предварительно заданной схеме раскладки;
- регистрация минимального количества предметов с помощью системы датчиков и сохранение этой информации в устройстве связи;
- загрузка складской системы предметами до заданной величины остатков. Назначение типа предмета для одного из отделений может осуществляться с помощью ручного сканера.
Ручной сканер включает, например, беспроводной интерфейс связи с устройством связи для передачи сигнала назначения типа предмета для одного из отделений в устройство связи.
Согласно вариантам осуществления изобретения дополнительно предусмотрен способ эксплуатации складской системы со следующими этапами:
- регистрация информации о наличии предметов по меньшей мере в одном из отделений;
- сравнение устройством связи полученной информации о наличии с сохраненной схемой раскладки;
- если устройство связи обнаружило расхождения между полученной информацией о наличии предметов и схемой раскладки, то устройство связи генерирует сигнал несоответствия загрузки и отправляет его по шине данных по адресу той группы датчиков, от которой была получена информация о наличии.
Оптические средства сигнализации могут быть соединены с группой датчиков с помощью шины данных, а электронная система управления группы датчиков, которая принимает от устройства связи сигнал несоответствия загрузки по шине данных, может активировать оптическое средство сигнализации соответствующей группы датчиков с целью подачи сигнала несоответствия загрузки.
Далее описываются дополнительные признаки возможных вариантов осуществления изобретения, при этом эти признаки можно комбинировать между собой, а также с уже описанными признаками.
Группа датчиков может включать несущий элемент с по меньшей мере двумя чувствительными элементами, которые располагаются на разных наружных поверхностях несущего элемента.
Предпочтительно, чтобы сечение несущего элемента имело угловатую форму, предпочтительно, чтобы оно было треугольным или четырехугольным, в частности, квадратным или прямоугольным.
Предлагается выполнять несущий элемент в форме угла, круга, креста, буквы у, полосы, решетки, меандра и/или звезды.
Дополнительно предлагается, чтобы несущий элемент был жестким, гибким или полугибким или обладал по меньшей мере двумя жесткими, гибкими или полугибкими участками, соединенными между собой.
Несущий элемент может быть изготовлен из пленки или из нескольких слоев одинаковой или разной пленки и/или материалов.
Дополнительно может быть предусмотрено, чтобы несущий элемент по меньшей мере частично формировал печатную плату с токопроводящими дорожками или по меньшей мере включал электропроводные структуры для обеспечения электрического контакта и/или передачи сигналов чувствительных элементов и/или других электрических и/или электронных компонентов и/или для соединения с шиной передачи данных и/или с источником питания и/или для соединения с по меньшей мере одной дополнительной группой датчиков.
В дополнительном варианте осуществления изобретения предлагается, чтобы чувствительный элемент в каждом случае был выполнен в виде источника сигнала или в виде приемника сигнала.
Предпочтительно, чтобы рядом с приемником сигнала был расположен источник контрольных сигналов таким образом, что приемник имеет возможность прямого или непрямого обнаружения сигналов соответствующего источника контрольных сигналов.
Дополнительно предлагается, чтобы по меньшей мере первый чувствительный элемент первой наружной поверхности группы датчиков был выполнен в дополнение ко второму чувствительному элементу второй наружной поверхности группы датчиков, в частности, чтобы первый чувствительный элемент был выполнен в виде источника сигнала, а второй чувствительный элемент был выполнен в виде приемника сигнала или чтобы первый чувствительный элемент был выполнен в виде приемника сигнала, а второй чувствительный элемент был выполнен в виде источника сигнала.
В дополнительном варианте осуществления изобретения предлагается, чтобы по меньшей мере два чувствительных элемента были выполнены в дополнение друг к другу и в каждом случае были расположены на противоположных друг другу наружных поверхностях несущего элемента, в частности, чтобы первый чувствительный элемент был выполнен на первой наружной поверхности в виде источника сигнала, а второй чувствительный элемент был выполнен на второй, противоположной первой, наружной поверхности в виде приемника сигнала, или чтобы первый чувствительный элемент был выполнен на первой наружной поверхности в виде приемника сигнала, а второй чувствительный элемент был выполнен на второй, противоположной первой, наружной поверхности в виде источника сигнала.
Предпочтительно, чтобы чувствительные элементы по меньшей мере частично были интегрированы в наружную поверхность несущего элемента или были расположены на ней.
Может быть предусмотрено, чтобы сигнал, переданный по меньшей мере одним источником и принятый по меньшей мере одним приемником, представлял собой магнитный, электромагнитный или акустический сигнал.
В дополнительном варианте осуществления изобретения предусматривается, чтобы источник сигнала включал по меньшей мере один светодиод, один органический светодиод или один пьезокристалл, или чтобы он был образован из матрицы таких элементов.
В частности, предлагается, чтобы по меньшей мере один источник сигнала излучал свет в ИК-диапазоне.
Дополнительно предлагается, чтобы по меньшей мере один чувствительный элемент и/или одна токопроводящая дорожка были напечатаны.
Дополнительно предлагается, чтобы на несущем элементе располагалась управляющая электроника, четко отличающая одну группу датчиков от другой группы датчиков.
Кроме того, предлагается, чтобы управляющая электроника активировала чувствительные элементы, регистрировала, обрабатывала и передавала поступающие от чувствительных элементов сигналы данных.
В дополнительном варианте осуществления изобретения предлагается, чтобы частота и/или интенсивность генерируемого управляющей электроникой и подаваемого источником сигнала могли изменяться.
В еще одном дополнительном варианте осуществления изобретения предлагается, чтобы сигнал подавался импульсами, позволяющими кодировать его.
Дополнительно предлагается, чтобы рабочее состояние имеющихся чувствительных элементов управляющая электроника могла активировать или запрашивать отдельно, группами или все вместе, в частности, чтобы источник сигнала подавал сигнал или чтобы приемнику сигнала мог отправлялся запрос, принимает ли он сигнал.
Кроме того, предлагается, чтобы по меньшей мере на одной наружной поверхности несущий элемент включал более двух, предпочтительно большое их количество, чувствительных элементов, расположенных в определенном порядке относительно друг друга, предпочтительно на по меньшей мере одной линии или в по меньшей мере один ряд.
В дополнительном варианте осуществления изобретения предлагается, чтобы чувствительные элементы совместно располагались на наружной поверхности несущего элемента группами и/или с чередованием для разных видов сигналов.
В еще одном дополнительном варианте осуществления изобретения предлагается, чтобы в каждом случае на наружной поверхности были расположены только чувствительные элементы одного вида, в частности, чтобы расположенные на одной наружной поверхности чувствительные элементы были выполнены в каждом случае только в виде источников сигнала или в каждом случае только в виде приемников сигнала.
Может быть предусмотрено, чтобы источники сигнала и приемники сигнала совместно располагались на наружной поверхности несущего элемента группами и/или с чередованием.
Дополнительно предлагается предусмотреть маркировку для последующего позиционирования и/или выравнивания группы датчиков.
Кроме того, предлагается предусмотреть устройство фиксации для последующего позиционирования и/или крепления группы датчиков.
Далее предлагается, чтобы по меньшей мере одна наружная поверхность несущего элемента была клейкой.
В дополнительном варианте осуществления изобретения может быть предусмотрено, чтобы на этой клейкой поверхности по меньшей мере временно находилась отсоединяемая покрывная пленка.
Дополнительно предусматривается система датчиков для определения наличия объектов с по меньшей мере двумя группами датчиков, расположенными в по меньшей мере одной позиции так, что они по меньшей мере частично включают одно контролируемое пространство и что подаваемый сигнал по меньшей мере одного источника сигнала первой группы датчиков может быть обнаружен по меньшей мере одним приемником сигнала второй группы датчиков в по меньшей мере одном состоянии загрузки, благодаря чему принятый сигнал интерпретируется как первое состояние загрузки, а отправленный, но не принятый сигнал интерпретируется как второе состояние загрузки.
В дополнительном варианте осуществления изобретения предусматривается, чтобы группы датчиков были расположены в по меньшей мере одной позиции так, что по меньшей мере одна из их наружных поверхностей по меньшей мере частично находится на противоположной стороне и что на по меньшей мере частично находящихся на противоположной стороне наружных поверхностях в каждом случае располагается по меньшей мере один чувствительный элемент, при этом они дополняют друг друга, в частности, по меньшей мере первый чувствительный элемент выполнен в виде источника сигнала, а по меньшей мере второй чувствительный элемент выполнен в виде приемника сигнала, либо по меньшей мере первый чувствительный элемент выполнен в виде приемника сигнала, а по меньшей мере второй чувствительный элемент выполнен в виде источника сигнала.
Дополнительно предлагается, чтобы по меньшей мере у одной из групп датчиков на по меньшей мере одной не обращенной к другой группе датчиков наружной поверхности располагался по меньшей мере один дополнительный чувствительный элемент.
Далее предлагается, чтобы по меньшей мере у одной из групп датчиков на одной в каждом случае отдаленной от другой группы датчиков наружной поверхности располагался по меньшей мере один дополнительный чувствительный элемент.
В дополнительном варианте осуществления изобретения предлагается, чтобы по меньшей мере один дополнительный чувствительный элемент был дополнением к виду по меньшей мере одного чувствительного элемента на по меньшей мере одной наружной поверхности, обращенной к другой группе датчиков; в частности, чтобы один чувствительный элемент был выполнен в виде источника сигнала, а другой чувствительный элемент был выполнен в виде приемника сигнала, либо чтобы один чувствительный элемент был выполнен в виде приемника сигнала, а другой чувствительный элемент был выполнен в виде источника сигнала.
В другом дополнительном варианте осуществления изобретения предусматривается, чтобы в каждом случае в отношении расположения по меньшей мере двух групп датчиков чувствительные элементы одного вида имели одинаковую ориентацию, в частности, чтобы все источники сигнала были ориентированы в первом направлении, а все приемники сигнала - во втором направлении.
Первое направление и второе направление могут быть противоположными друг другу.
Дополнительно предлагается, чтобы на одной наружной поверхности одной группы датчиков или одного участка одной группы датчиков с чувствительным элементом располагались по меньшей мере два, предпочтительно большое их количество, чувствительных элемента.
Далее предлагается, чтобы чувствительные элементы по меньшей мере двух соседних групп датчиков в каждом случае размещались приблизительно на одной общей оси.
Дополнительно предлагается, чтобы на обращенных друг к другу наружных поверхностях одной группы датчиков или одного участка одной группы датчиков с чувствительными элементами в каждом случае располагались только чувствительные элементы одного вида, в частности, чтобы размещенные на одной соответствующей наружной поверхности чувствительные элементы были выполнены только в виде источников сигнала или только в виде приемников сигнала.
В дополнительном варианте осуществления изобретения предлагается, чтобы чувствительные элементы отстояли друг от друга настолько, что на каждую измеряемую единицу минимального размера приходилась по меньшей мере одна пара чувствительных элементов, в частности, чтобы для каждой измеряемой единицы минимального размера в наличии имелся по меньшей мере один источник сигнала и один приемник сигнала, предпочтительно, чтобы на каждую измеряемую единицу минимального размера приходилось несколько источников сигнала и несколько приемников сигнала.
Дополнительно предлагается, чтобы управляющая электроника в каждом случае координировала работу дополняющих друг друга и совместно действующих чувствительных элементов по меньшей мере двух групп датчиков или разных групп датчиков попарно или группами, в частности, синхронизировала их друг с другом и, в частности, управляла передачей и приемом сигналов.
В дополнительном варианте осуществления изобретения предлагается, чтобы контролируемое пространство было разделено на по меньшей мере два участка, логически управляемых соответствующим образом управляющей электроникой, в частности, по меньшей мере один источник сигнала и один приемник сигнала или одна группа дополняющих друг друга и совместно действующих чувствительных элементов закреплены за первым участком и по меньшей мере один дополнительный источник сигнала и один дополнительный приемник сигнала либо группа других дополняющих друг друга и совместно действующих чувствительных элементов закреплены за другим участком.
В еще одном дополнительном варианте осуществления изобретения предусматривается, что управляющая электроника анализирует полученные сигналы и с помощью устройства связи передает эти сигналы и/или вычисленные данные о состоянии загрузки в высокоуровневое складское оборудование или в высокоуровневый блок управления.
Кроме того, предусматривается устройство для складирования грузов и управления ими, в частности, штучных и/или сыпучих грузов с по меньшей мере одним контролируемым пространством для размещения грузов, и одной системой датчиков.
Предлагается, чтобы состояние загрузки и/или уровень заполнения контролируемого пространства контролировали по меньшей мере два расположенных примерно на противоположных сторонах чувствительных элемента, при этом полученный в по меньшей мере одном состоянии загрузки сигнал по меньшей мере одного источника сигнала первой группы датчиков может быть обнаружен по меньшей мере одним приемником сигнала второй группы датчиков так, что полученный сигнал интерпретируется как первое состояние загрузки, а отправленный, но не полученный, или полученный в затухшем виде сигнал интерпретируется как второе состояние загрузки, при этом комбинация нескольких состояний загрузки может быть интерпретирована как уровень заполнения.
Дополнительно предлагается, чтобы контролируемое пространство было по меньшей мере частично ограничено по меньшей мере двумя ограничивающими элементами или по меньшей мере двумя участками ограничивающего элемента, при этом ограничивающие элементы или участки в каждом случае по меньшей мере частично находились приблизительно на противоположных сторонах по меньшей мере одной наружной поверхности.
Кроме того, предлагается, чтобы на соответствующем ограничивающем элементе или на соответствующем участке располагалась по меньшей мере одна группа датчиков.
Дополнительно может быть предусмотрено, чтобы по меньшей мере одна группа датчиков была расположена на обращенной к контролируемому пространству наружной поверхности ограничивающего элемента.
В дополнительном варианте осуществления изобретения предлагается, чтобы по меньшей мере одна группа датчиков была расположена на отдаленной от контролируемого пространства наружной поверхности соответствующего ограничивающего элемента.
В другом дополнительном варианте осуществления изобретения предлагается по меньшей мере частично интегрировать по меньшей мере на одной стороне контролируемого пространства по меньшей мере одну группу датчиков в соответствующий ограничивающий элемент.
Также может быть предусмотрено, чтобы ограничивающий элемент включал по меньшей мере одно сигнальное отверстие, благодаря которому по меньшей мере одна интегрированная или по меньшей мере одна расположенная на отдаленной от контролируемого пространства наружной поверхности группа датчиков может отправлять сигнал сквозь сигнальное отверстие по меньшей мере одной дополнительной группе датчиков и/или принимать сигнал от по меньшей мере одной дополнительной группы датчиков.
Такое исполнение может значительно способствовать использованию групп датчиков с датчиками на противоположных наружных поверхностях несущего элемента, так как в результате такого использования в процессе могут быть задействованы датчики с двух сторон и они могут взаимодействовать с другими датчиками. Благодаря этому также существует возможность применения на другой стороне вдвое меньшего количества групп датчиков, так как этот вариант осуществления изобретения позволяет датчикам получать доступ к двум сторонам, а не к соответствующей одной стороне из-за, как правило, непроницаемого ограничивающего элемента или других случаев применения датчиков только с одной стороны.
В дополнительном варианте осуществления изобретения может быть предусмотрено, чтобы сигнальное отверстие по меньшей мере частично было заполнено чувствительным элементом и/или чтобы сигнальное отверстие по меньшей мере частично было закрыто и/или заполнено пропускающим сигнал материалом.
Кроме того, может быть предусмотрено, чтобы по меньшей мере один ограничивающий элемент включал одно приспособление или одно углубление для по меньшей мере частичного размещения по меньшей мере одной группы датчиков.
В частности, дополнительно может быть предусмотрено, чтобы это приспособление или это углубление включало на по меньшей мере одной наружной поверхности одно отверстие для установки ограничивающего элемента.
Кроме того, может быть предусмотрено, чтобы по меньшей мере одна группа датчиков была зафиксирована в определенной позиции на по меньшей мере одном ограничивающем элементе относительно опорной точки устройства складирования и/или ограничивающего элемента и/или по меньшей мере одной дополнительной группы датчиков.
Предлагается, чтобы по меньшей мере одна группа датчиков была приклеена к по меньшей мере одному ограничивающему элементу.
Далее предлагается, чтобы по меньшей мере две, предпочтительно большое их количество, группы датчиков были расположены приблизительно параллельно друг другу на ограничивающем элементе, при этом чтобы расположенные на одной плоскости чувствительные элементы формировали матрицу датчиков.
На по меньшей мере двух расположенных на противоположных сторонах и, тем самым, приблизительно параллельных друг другу ограничивающих элементах может быть размещен по меньшей мере один разделительный элемент, предпочтительно несколько, при этом эти разделительные элементы продолжаются перпендикулярно ограничивающим элементам, так что формируется по меньшей мере два контролируемых пространства, предпочтительно большое их количество.
В дополнительном варианте осуществления изобретения предусматривается, чтобы на по меньшей мере одном ограничивающем элементе на по меньшей мере одной наружной поверхности присутствовало по меньшей мере одно устройство фиксации для по меньшей мере одного разделительного элемента.
В еще одном дополнительном варианте осуществления изобретения предлагается, чтобы на по меньшей мере одной стороне ограничивающего элемента было расположено большое количество устройств фиксации, что обеспечивало бы разделение контролируемого пространства на изменяемые участки.
Дополнительно предлагается, чтобы за каждым контролируемым пространством был закреплен по меньшей мере один источник сигнала и один приемник сигнала.
В частности, предлагается, чтобы устройство складирования представляло собой стеллаж и чтобы по меньшей мере один первый ограничивающий элемент образовывал полку стеллажа.
Дополнительно предлагается, чтобы соответствующие дополнительные ограничивающие элементы образовывали другие уровни стеллажа, при этом чтобы пространство между двумя уровнями в каждом случае представляло собой по меньшей мере одно контролируемое пространство.
Кроме того, предлагается, чтобы по меньшей мере одна группа датчиков располагалась под соответствующей полкой одного уровня стеллажа в соответствии с силой тяжести.
Чувствительные элементы разных уровней стеллажа могут быть выровнены на группе датчиков в соответствии с их конкретной позицией в каждом случае приблизительно на одной общей оси, продолжающейся вертикально в соответствии с направлением воздействия силы тяжести.
Дополнительно предлагается, чтобы чувствительные элементы на разных уровнях стеллажа в соответствии с их видом были ориентированы в каждом случае только в одном направлении, в частности, чтобы все источники сигнала на разных уровнях были ориентированы только в одном первом направлении и чтобы все приемники сигнала на разных уровнях были ориентированы только в одном втором направлении.
В дополнительном варианте осуществления изобретения предлагается, чтобы все источники сигнала были ориентированы в соответствии с силой тяжести сверху вниз и чтобы все приемники сигнала были ориентированы в противоположном направлении, снизу вверх.
Дополнительно предлагается, чтобы полка стеллажа на одном соответствующем уровне стеллажа была расположена под наклоном в по меньшей мере одном направлении относительно горизонтальной плоскости пространства.
В частности, предлагается, чтобы устройство складирования представляло собой шкаф с по меньшей мере одним выдвижным ящиком, при этом по меньшей мере две соответствующие противоположные боковые стенки выдвижного ящика по меньшей мере частично ограничивают контролируемое пространство, выступая в качестве ограничивающих элементов.
В еще одном дополнительном варианте осуществления изобретения предлагается, чтобы по меньшей мере одна группа датчиков была интегрирована в по меньшей мере один ограничивающий элемент, образующий одну боковую стенку.
Чувствительные элементы разных ограничивающих элементов могут быть выровнены на группе датчиков в соответствии с их конкретной позицией в каждом случае приблизительно на одной общей оси, проходящей примерно горизонтально и перпендикулярно направлению воздействия силы тяжести F.
Дополнительно предлагается, чтобы чувствительные элементы разных ограничивающих элементов в соответствии с их видом были ориентированы в каждом случае только в одном направлении, в частности, чтобы все источники сигнала разных ограничивающих элементов были ориентированы только в одном первом направлении, и чтобы все приемники сигнала разных ограничивающих элементов были ориентированы только в одном втором направлении.
Кроме того, предлагается, чтобы все источники сигнала были ориентированы по направлению выдвигания ящика от его задней к передней стенке и чтобы все приемники сигнала были ориентированы в противоположном направлении от передней стенки к его задней стенке.
Дополнительно предлагается предусмотреть по меньшей мере один дополнительный ограничивающий элемент, расположенный перпендикулярно направлению выдвигания выдвижного ящика.
Кроме того, предлагается предусмотреть по меньшей мере один разделительный элемент, расположенный параллельно направлению выдвигания выдвижного ящика.
В дополнительном варианте осуществления изобретения предлагается, чтобы выдвижной ящик включал один штекер, обеспечивающий электрическое соединение ящика по меньшей мере в его закрытом состоянии с источником питания и/или с находящейся в корпусе шкафа линией передачи данных.
Дополнительно предлагается, чтобы блок управления запрашивал по меньшей мере одно состояние загрузки по меньшей мере одного контролируемого пространства, отделения разделенного контролируемого пространства или его участка, анализировал результат и/или передавал его в высокоуровневую систему управления.
Кроме того, предлагается, чтобы блок управления логически управлял по меньшей мере двумя взаимодействующими чувствительными элементами по меньшей мере двух разных групп датчиков по меньшей мере части взаимодействующих матриц датчиков, и, таким образом, задавал по меньшей мере один логический участок, продолжающийся на одном уровне вдоль направления размещения первой группы датчиков и/или перпендикулярно направлению размещения первой группы датчиков через по меньшей мере одну дополнительную группу датчиков, расположенную параллельно.
В дополнительном варианте осуществления изобретения предлагается, чтобы по меньшей мере один участок точно соответствовал одной единице складируемого груза.
В еще одном дополнительном варианте осуществления изобретения предлагается, чтобы по меньшей мере один логический участок соответствовал по меньшей мере одному комплексу из ограничивающих элементов и/или разделительных элементов, в частности, размеру по меньшей мере одного участка, образованного ограничивающими и/или разделительными элементами.
В еще одном дополнительном варианте осуществления изобретения предлагается, чтобы в процессе инициализации блок управления регистрировал участки на основании взаимного расположения ограничивающих и/или разделительных элементов и соответствующим образом разделял контролируемое пространство на логические участки и сохранял эту информацию в системе управления.
Другие признаки, особенности и преимущества данного изобретения вытекают из формулы изобретения, текст которой составлен на основании содержания описания. Вышеназванные и дополнительно описываемые далее признаки могут применяться не только в указанной в каждом случае комбинации, но и в других комбинациях или отдельно, при этом они не будут выходить за рамки настоящего изобретения.
Варианты осуществления и примеры изобретения показаны на изображениях и более подробно поясняются в приведенном далее описании. На изображениях показаны:
Фиг. 1: вид в перспективе группы датчиков,
Фиг. 2: разные виды группы датчиков,
Фиг. 3: виды в перспективе возможных сечений группы датчиков,
Фиг. 4: виды сверху на возможные формы группы датчиков,
Фиг. 5: вид в перспективе группы датчиков,
Фиг. 6: вид в перспективе группы датчиков,
Фиг. 7: вид спереди группы датчиков,
Фиг. 8: вид спереди группы датчиков,
Фиг. 8а: вид спереди группы датчиков,
Фиг. 9: вид спереди группы датчиков с сечением детали,
Фиг. 10: вид сбоку группы датчиков,
Фиг. 11 диаграмма с возможными сигналами,
Фиг. 12: вид сбоку группы датчиков,
Фиг. 13 вид сверху группы датчиков,
Фиг. 14: схематическое изображение системы датчиков,
Фиг. 15: вид сбоку системы датчиков,
Фиг. 16: вид сбоку системы датчиков,
Фиг. 17: вид сбоку системы датчиков.
Фиг. 18: схематические изображения устройства складирования,
Фиг. 19: схематические изображения устройства складирования с разными состояниями загрузки,
Фиг. 20: виды сбоку для расположения группы датчиков на устройстве складирования,
Фиг. 21: вид сбоку ограничивающих элементов,
Фиг. 22: вид сбоку и сечение ограничивающего элемента
Фиг. 23: виды в перспективе ограничивающих элементов,
Фиг. 24: виды в перспективе ограничивающих элементов,
Фиг. 25: вид в перспективе ограничивающего элемента,
Фиг. 26: вид в перспективе ограничивающего элемента,
Фиг. 27: вид в перспективе ограничивающего элемента,
Фиг. 28: вид в перспективе, а также вид сверху и подробный вид ограничивающего элемента,
Фиг. 29: вид в перспективе стеллажа,
Фиг. 31: полка стеллажа и сечение нескольких полок стеллажа,
Фиг. 32: схематическое изображение системы стеллажей,
Фиг. 33: структурная схема системы стеллажей, изображенной на фиг. 32,
Фиг. 34 блок-схема организации системы стеллажей, изображенной на фиг. 32 и 33, и
Фиг. 35 блок-схема эксплуатации системы стеллажей, изображенной на фиг. 32 и 33.
На фиг. 1 показан вид в перспективе группы 100 датчиков, которая в одном из вариантов осуществления изготовлена с несущим элементом 10 из гибкого материала. Это вид под углом сверху на передний левый угол, который здесь изображен приподнятым и позволяет получить представление как о верхней стороне 12, так и о нижней стороне 14. На группе 100 датчиков как на верхней, так и на нижней сторонах 12, 14 расположено, соответственно, по одному чувствительному элементу 20.
Такое расположение позволяет группе датчиков работать в двух направлениях (фиг. 2а). В принципе, на каждой наружной поверхности группы датчиков могут быть размещены чувствительные элементы, благодаря чему группа датчиков могла бы функционировать во всех трех измерениях, в каждом из случаев - в двух направлениях. На фиг. 2b, вид сверху, изображена такая группа датчиков с чувствительными элементами на по меньшей мере двух боковых поверхностях 11, 12. Чувствительные элементы на остальных боковых стенках 13, 14, а также на торцовых поверхностях не показаны. Группа датчиков, как показано на фиг. 2b, могла бы контролировать пространство в пределах своих ограничений вместе с другими группами, повернутыми в каждом случае на 90°. Группа датчиков согласно фиг. 2с вместе с дополнительными группами датчиков могла бы контролировать пространство, соответственно, по диагонали, а с типом конструкции, как показано на фиг. 2d, - еще и под прямыми углами.
При этом сечение группы датчиков может представлять собой всевозможные формы (фиг. 3). Для размещения соответствующих чувствительных элементов лучше всего подходят те формы, которые образуют прямую поверхность применительно к размерам или количеству установленных чувствительных элементов, для чего подходит сечение с углами.
На фиг. 4 показаны виды сверху на несколько возможных форм групп датчиков для наилучшего возможного соответствия контролируемому пространству и его виду (фиг. 4а-4с). Если группу датчиков необходимо оптимизировать в соответствии с видом контролируемого пространства, существует возможность изготовления группы датчиков не со сплошной формой, а с максимально захватывающей пространство формой, например, крестообразных (фиг. 4d) или в форме меандра (фиг. 4е), при этом датчики могут быть размещены по штриховой линии, или несущий элемент может быть узким и повторять прохождение штриховой линии.
В одном из вариантов осуществления группа датчиков представляет собой плоскую полосу (фиг. 4b), т.е. высота при этом намного меньше ширины, а ширина - меньше длины. Также имеется возможность сформировать на одном несущем элементе 10 группу датчиков сравнительно большой длины с двумя или несколькими участками 10а, 10b, на которых впоследствии будут размещены чувствительные элементы, и соединить каждый из этих участков друг с другом гибким фрагментом участка, включающим, в частности, электрические линии для подачи питания к чувствительным элементам и передачи от них сигналов.
На фиг. 6 показан вид в перспективе группы 100 датчиков в одном из вариантов осуществления с несущим элементом 10 в форме полосы. При этом несущий элемент может быть изготовлен из жесткого или из гибкого материала или также из нескольких соединенных между собой слоев одинаковых или разных материалов. В этом варианте осуществления несущий элемент 10 одновременно выступает в роли печатной платы, на нем размещены соответствующие токопроводящие дорожки 15, а также точки контакта чувствительных элементов и/или возможных дополнительных электрических компонентов или групп компонентов. Токопроводящие дорожки, а также контактные поверхности для датчиков, могут быть нанесены непосредственно на несущий элемент или также на пленку, впоследствии покрывающую несущий элемент.
На фиг. 7 показан вид спереди группы 100 датчиков с одним чувствительным элементом 20, размещаемым на каждой наружной поверхности 12, 14. Чувствительные элементы 20 в каждом случае являются экземплярами одного вида, а именно выполнены в виде источников 21 сигнала или в виде приемников 22 сигнала. Источники и приемники сигнала рассчитаны на работу с сигналами одного вида. По принципу передатчик-приемник это могут быть любые виды подаваемых и принимаемых сигналов, в частности, световые сигналы, предпочтительно свет в ИК-диапазоне, или акустические сигналы, предпочтительно ультразвук. В дополнительных примерах осуществления изобретения описание исходит из использования световых сигналов. Источники 21 сигнала здесь схематически показаны в виде кругов или замкнутых полукругов, в то время как приемники 22 сигнала схематически показаны как разомкнутые полукруги или, соответственно, «ключи», зев которых изображается направленным в сторону от соответствующей наружной поверхности. Введенное впоследствии понятие «направление ориентации» (OR) чувствительных элементов 20 следует понимать как прямую, продолжающуюся от их центра и от высшей или, соответственно, низшей точки линии окружности относительно соответствующей наружной поверхности и воспроизводящую основное направление выхода или входа сигналов.
В дополнительном варианте осуществления рядом с приемником 22 сигнала располагается источник 26 контрольных сигналов, т.е. в непосредственной или по меньшей мере непрямой близости от приемника 22 сигнала (фиг. 8). Это позволяет улучшить функциональную надежность группы датчиков или, соответственно, высокоуровневой системы. Если сигнал для первой противопоставленной группы датчиков был отправлен, но не принят, такая схема позволит дополнительно проверить работоспособность приемника сигнала. В сущности, тот же принцип может быть применен и для источника сигнала.
На фиг. 8а источники 21 и приемники 22 сигнала одной группы 100 датчиков расположены попарно на той же печатной плате, в частности, непосредственно рядом друг с другом. Источник 21 и приемник 22 сигнала соотнесены с выполненным в полке 410 стеллажа отверстием, так что сигнал источника 21 может быть отправлен сквозь это отверстие или, соответственно, принят приемником 22. Так обеспечивается короткий путь прохождения сигнала, что повышает надежность группы датчиков. В частности, отверстие может быть покрыто пленкой, предотвращающей загрязнение отверстия и, тем самым, источника 21 и приемника 22 сигнала.
Чувствительные элементы 20, работающие как источники 21 или как приемники 22 сигнала, могут быть по меньшей мере частично интегрированы на соответствующей наружной поверхности в несущий элемент 10 для защиты соответствующего чувствительного элемента 20 или для получения гладкой наружной стороны. На фиг. 9 изображен приемник 22 сигнала, который на одном из участков наружной поверхности 12 полностью интегрирован в несущий элемент 10. На нижней стороне 14 интеграция источника сигнала осуществляется путем покрытия поверхности дополнительным слоем 32, в результате чего источник 21 сигнала по меньшей мере частично интегрирован в несущий элемент, при этом защитный слой 32 в соответствующих местах расположения чувствительного элемента 20 включает отверстия и, тем самым, защищает чувствительные элементы или соответствующие токопроводящие дорожки либо формирует гладкую наружную поверхность (фиг. 9).
В качестве альтернативы источник 21 сигнала может быть расположен и на верхней стороне полки стеллажа (номер позиции 21'), в частности, непосредственно рядом с приемником 22 сигнала. Это упрощает прием сигнала, отправленного источником, приемником, так как расстояние между приемником и источником более короткое или, соответственно, сигналу не приходится пересекать пространство установки отделения. В частности, можно использовать более слабый сигнал, что снизит опасность его взаимодействия с сигналами соседних источников. Еще одно преимущество заключается в отсутствии необходимости во взаимном согласовании приемника и источника сигнала в отделении. Это согласование производится уже за счет самого размещения на печатной плате. Благодаря этому возможен больший допуск на изготовление полки, так как взаимное выравнивание полок стеллажа или, соответственно, групп датчиков на полках не требуется.
На фиг. 10 показан вид сбоку группы 100 датчиков с большим количеством чувствительных элементов, расположенных на соответствующей наружной поверхности 12, 14, при этом на одной наружной поверхности располагаются чувствительные элементы только одного вида. Это позволяет комбинировать множество групп датчиков друг с другом каскадом, т.е. с постоянной ориентацией в одном направлении. Расстояние между чувствительными элементами на соответствующей одной наружной поверхности может быть выбрано таким образом, чтобы источник сигнала всегда воздействовал только на один приемник сигнала или несколько приемников сигнала, при этом чувствительные элементы 20 располагаются друг рядом с другом настолько близко, что конусы сигналов перекрываются на стороне приемника.
На фиг. 11 показана диаграмма, относящаяся к нескольким сигналам. Первый сигнал S1 соответствует двум разным состояниям BZ1 и BZ2 загрузки, при этом в состоянии BZ1 загрузки прием сигнала S1 не происходит, что интерпретируется как перекрытие складируемым грузом G зоны 21/22 чувствительности, и наоборот, в состоянии BZ2 загрузки происходит прием сигнала S1, что интерпретируется как освобождение зоны чувствительности от складируемого груза G. Сигналы 2-4 соответствуют сигналам разной интенсивности, модуляции или с отдельными блоками частоты. Эти сигналы могут быть использованы для улучшения целостности сигнала или, соответственно, данных либо, в частности, в условиях взаимного перекрытия конусов сигналов для обращения к отдельным чувствительным элементам или для их идентификации.
На фиг. 12 показан вид сбоку группы датчиков также с большим количеством чувствительных элементов 20, расположенных на противоположных наружных поверхностях несущего элемента 10, при этом верхние чувствительные элементы 20 по меньшей мере частично утоплены в защитный слой 32 и, тем самым, образуют практически гладкую поверхность. На противоположной наружной поверхности чувствительные элементы 20, напротив, полностью интегрированы в несущий элемент. На эту нижнюю сторону нанесен клеящий слой 30, покрытый не клейким поверхностным слоем 31. По меньшей мере клеящий слой 30 в местах расположения чувствительных элементов 20 включает соответствующие отверстия для предотвращения повреждения или загрязнения чувствительных элементов 20, а также для свободного прохождения последующих сигналов S. Для последующего монтажа не клейкий поверхностный слой 31 удаляют с клеящего слоя 30, что позволяет производить выравнивание на устройстве 300 и фиксацию на нем с помощью клеящего слоя 30.
На фиг. 13 показан вид сверху группы 100 датчиков с несущим элементом 10 и находящимися на несущем элементе 10 токопроводящими дорожками 15, а также с подключенными к токопроводящим дорожкам 15 чувствительными элементами 20. На правом конце группы датчиков размещена небольшая жесткая печатная плата с необходимой для управления чувствительными элементами 20 управляющей электроникой 16 и другими электрическими или электронными компонентами 23, например, штекером 23 для подачи питания и обмена сигналами 24/25 управления с чувствительными элементами 20 с целью передачи в высокоуровневую систему 200 датчиков либо, соответственно, в высокоуровневую систему 260 управления. Группа 100 датчиков дополнительно включает метки или, соответственно, приспособление 40 для фиксации на устройстве, выполненное в виде оптических меток (например, в виде стрелки) или в виде форм (например, полукруги, отверстия). В частности, отверстия могут быть использованы для последующей фиксации группы 100 датчиков в определенном положении с помощью винта и т.д.
На фиг. 14 схематически показано расположение системы 200 датчиков, состоящей из контролируемого пространства R и двух групп 100а, 100b датчиков, по меньшей мере частично охватывающих или покрывающих это пространство, при этом группы датчиков по меньшей мере частично располагаются на противоположных сторонах. При этом группы 100а, 100b датчиков или, соответственно, находящиеся на обращенных друг к другу наружных поверхностях чувствительные элементы 20 расположены таким образом, чтобы по меньшей мере один источник 21 сигнала первой группы 100а датчиков размещался приблизительно противоположно приемнику 22 сигнала второй группы 100b датчиков, благодаря чему подаваемый источником 21 сигнал может быть отправлен сквозь контролируемое пространство R и принят приемником 22 второй группы 100 В датчиков. Подобное расположение может быть реализовано в пространстве произвольным образом. На фиг. 14b изображены две вертикально ориентированные группы 100а, 100b датчиков, в которых сигнал S отправляется сквозь контролируемое пространство R и принимается в горизонтальном направлении.
На фиг. 15 показан вариант осуществления системы 200 датчиков, вид сбоку, с компоновкой из двух групп 100а, 100b датчиков, в которой группы датчиков ориентированы относительно друг друга так, что на противоположных друг другу наружных поверхностях 14а и 12b могут взаимодействовать чувствительные элементы 20а и 20b, т.е. чувствительный элемент 20а может отправлять сигнал, а второй чувствительный элемент 20b - принимать его.
При этом взаимное расположение и вид чувствительных элементов выбирается так, чтобы у групп 100а, 100b датчиков на их обращенных друг к другу наружных поверхностях 14а и 12b всегда находилось на противоположных сторонах по одному источнику 21 и по одному приемнику 22 сигнала. На соответствующих отдаленных друг от друга наружных поверхностях двух групп 100а, 100b датчиков расположены другие чувствительные элементы, дополняющие в каждом случае тот чувствительный элемент, который находится на соответствующей группе датчиков на обращенной к другой группе датчиков наружной поверхности. «Дополняющий» в данном контексте обозначает соответствующий чувствительный элемент другого вида. На фиг. 15а наружная поверхность 14а группы 100а датчиков с источником 20а сигнала находится на стороне, противоположной наружной поверхности 12b группы 100b датчиков с приемником 20b сигнала. Тем самым, на наружной поверхности 12а, не противоположной группе 100b датчиков, образуется дополнительный чувствительный элемент 20 с, выступающий в роли приемника сигнала. На группе 100b датчиков, на наружной поверхности 14b, отдаленной от группы 100а датчиков, образуется дополнительный чувствительный элемент 20d, выступающий в роли приемника сигнала. Соответственно, все чувствительные элементы разных групп датчиков, в каждом случае одного вида, каждый раз ориентированы в одном направлении OR, а именно: все источники сигнала ориентированы в первом направлении OR 21, а все приемники сигнала - во втором направлении OR 22 (фиг. 15b).
На фиг. 16 показан вид сбоку системы 200 датчиков с четырьмя расположенными друг над другом группами 100 датчиков, в которой соответствующие источники 21 сигнала ориентированы в первом направлении OR 21 сверху вниз и, соответственно, все приемники 22 сигнала ориентированы во втором направлении OR 22 снизу вверх. Такая организация позволяет эффективно размещать несколько групп датчиков аналогичной конструкции в пределах одной общей системы датчиков и комбинировать их каскадами. При этом действующие совместно чувствительные элементы по меньшей мере двух соседних групп датчиков расположены на общей оси А.
На фиг. 17 показана система 200 датчиков с тремя группами 100 датчиков, расположенных в каждом случае друг над другом и в каждом случае включающих множество чувствительных элементов 20. Чувствительные элементы одного вида ориентированы исключительно в одном первом направлении OR 21 и в одном втором направлении OR 22. Все действующие в каждом случае совместно чувствительные элементы разных групп датчиков располагаются на одной общей оси А. Между двумя противоположными группами 100 датчиков в каждом случае находится контролируемое пространство R с множеством по меньшей мере попарно действующих совместно чувствительных элементов разных групп датчиков. Контролируемые пространства R могут быть разделены на меньшие участки, при этом в каждом случае управляющая электроника 260 формирует группы и закрепляет эти группы за соответствующими участками ТВ.
На фиг. 18 схематически показано устройство 300 складирования с системой 200 датчиков. Для этого устройство 300 складирования включает место R для хранения или, соответственно, размещения груза G, который по меньшей мере частично окружен или, соответственно, охватывается ограничивающим элементом 310, или участками 321, 322 ограничивающего элемента 310, или двух разных ограничивающих элементов 310а, 310b. В одном из вариантов осуществления изобретения система 200 датчиков с двумя разными группами 100а, 100b датчиков располагается на двух ограничивающих элементах 310а, 310b так, что по меньшей мере один источник 21 сигнала первой группы 100а датчиков может действовать совместно с по меньшей мере одним приемником 22 сигнала второй группы 100b датчиков, при этом испускаемый источником 21 сигнал S направляется через контролируемое пространство R к приемнику 22 сигнала (фиг. 19а). Если складируемый груз G не блокирует путь сигнала S, то приемник 22 принимает испускаемый источником 21 сигнал S, что интерпретируется как первое состояние BZ1 загрузки, а именно отсутствие складируемого груза G в контролируемом пространстве R (фиг. 19b).
Однако если в контролируемом пространстве R присутствует складируемый груз G, то путь сигнала S блокируется и испускаемый источником 21 сигнал S не может быть принят приемником 22, что интерпретируется как второе состояние BZ2 загрузки, а именно наличие складируемого груза G в контролируемом пространстве R (фиг. 19d).
На фиг. 20 показаны разные возможности размещения группы 100 датчиков на ограничивающем элементе 310. Группа 100 датчиков может быть расположена на наружной поверхности ограничивающего элемента 310, обращенной к контролируемому пространству R (фиг. 20а). Вторая возможность - размещение группы 100 датчиков на наружной поверхности ограничивающего элемента 310, отдаленной от контролируемого пространства R (фиг. 20b). Дополнительная возможность - по меньшей мере частичное интегрирование группы 100 датчиков в ограничивающий элемент 310 в соответствующем отверстии 318 (фиг. 20с).
В одном из вариантов осуществления изобретения для размещения группы датчиков согласно фиг. 20b и 20с, в соответствии с которыми группа датчиков и находящиеся на ней чувствительные элементы не имели бы доступа к контролируемому пространству R и, тем самым, не могли бы отправлять или принимать сигналы S, в ограничивающем элементе 310 предусматривается отверстие, выступающее в роли сигнального отверстия 315 для пропускания сигналов чувствительных элементов. Данное сигнальное отверстие 315 может быть вырублено или высверлено в ограничивающем элементе 310 и позволяет чувствительному элементу 20 взаимодействовать с дополняющим его чувствительным элементом сквозь контролируемое пространство R. На фиг. 21а показана группа датчиков, расположенная на обратной стороне ограничивающего элемента 310, отдаленной от контролируемого пространства R, с сигнальным отверстием 315 на всю толщину ограничивающего элемента 310. В случае с интегрированной группой 100 датчиков по меньшей мере на одной стороне находится по меньшей мере одно сигнальное отверстие 315 или на обеих сторонах находятся по меньшей мере два сигнальных отверстия 315 в соответствующих местах, где присутствуют чувствительные элементы (фиг. 21b).
Чувствительный элемент 20 может выступать над поверхностью группы 100 датчиков и, тем самым, может по меньшей мере частично заполнять такое сигнальное отверстие 315. При этом группа датчиков располагается относительно ограничивающего элемента и фиксируется по меньшей мере частично, так что по меньшей мере один чувствительный элемент 20 совмещен с сигнальным отверстием 315. В дополнительном варианте осуществления изобретения сигнальное отверстие 315 по меньшей мере частично заполнено материалом, пропускающим используемый чувствительными элементами вид сигнала, например прозрачным синтетическим полимером. Это позволяет получить гладкую поверхность, а в сигнальных отверстиях не будет скапливаться мусор, который мог бы стать причиной помех для сигналов (фиг. 22а).
В качестве альтернативы или дополнительно может быть предусмотрен дополнительный защитный слой 316, например, пленка или клейкая лента из прозрачного материала (фиг. 22b).
Для размещения группы 100 датчиков в одном из вариантов осуществления изобретения на ограничивающем элементе 310 располагается приспособление 319 (фиг. 23а) или углубление 318 (фиг. 23b). На фиг. 23а показано приспособление с отверстием 319, в которое может быть задвинута группа 100 датчиков, при этом приспособление может фиксировать ее так, что группа датчиков надежно удерживается на наружной поверхности. В ограничивающем элементе 310 предусмотрены сигнальные отверстия 315, соответствующие контролируемому пространству R, что позволяет чувствительным элементам 20 одной группы 100 датчиков отправлять и принимать сигналы.
На фиг. 23b изображено углубление 318 в виде открытого вверх углубления, предназначенное для размещения группы 100 датчиков. В дополнительном варианте осуществления изобретения в нем заподлицо размещается группа 100 датчиков. В углублении присутствуют открытые вниз сигнальные отверстия 315.
На фиг. 24а показан ограничивающий элемент 310 с открытым вверх углублением 318, в котором сверху 319 размещается группа 100 датчиков. На фиг. 20b показан ограничивающий элемент 310 с открытым в сторону углублением, в котором сбоку размещается группа датчиков.
На фиг. 25 показан пластинообразный ограничивающий элемент 310 с находящейся сверху стороной для складируемых грузов G и, соответственно, с расположенным вверху относительно направления воздействия силы F тяжести контролируемым пространством R, на нижней стороне которого размещается несколько групп 100 датчиков параллельно друг другу. Группы 100 датчиков ориентированы в соответствии с расположенными на наружных поверхностях чувствительными элементами 20 на ограничивающем элементе 310 так, что чувствительные элементы 20 совмещаются с соответствующими сигнальными отверстиями 315. Затем гибкие группы 100 датчиков фиксируются с помощью имеющегося на одной стороне клеящего слоя на наружной поверхности ограничивающего элемента 310.
Каждая группа 100 датчиков обладает большим количеством чувствительных элементов 20, расположенных в один ряд на соответствующей группе 100 датчиков. Так как на ограничивающем элементе 310 параллельно друг другу расположено несколько групп 100 датчиков, образуется матрица датчиков (фиг. 26), которая может быть целенаправленно активирована и/или проанализирована управляющей электроникой 360 в том числе на участках (фиг. 27).
В одном из вариантов осуществления изобретения охватывающие или покрывающие контролируемое пространство ограничивающие элементы 310 включают приспособления 325 (фиг. 28а) для размещения дополнительных ограничивающих элементов 310 или, соответственно, разделительных элементов 330 для разделения контролируемого пространства R на участки ТВ, которые далее также называются отделениями (фиг. 28b). Для этого дополнительные ограничивающие элементы 310 или разделительные элементы 330 вставляются сверху в приспособления 325, так что образуются приблизительно прямые углы и в сочетании с аналогичной процедурой на другом конце вставленных ограничивающих элементов 310 или разделительных элементов 330 - в целом, изолированный участок ТВ. В одном из вариантов осуществления изобретения приспособления 325 включают сбоку контактные поверхности 326 (фиг. 28с), так что вставленные туда ограничивающие элементы 310 и присутствующие в них группы 100 датчиков электрически соединены с системой 200 датчиков или, соответственно, с устройством 300 складирования. Далее ограничивающие элементы 310 или разделительные элементы 330 включают электрическую проводку и линии 327 передачи данных для соединения вставленных элементов с источником питания и линиями передачи данных выдвижного ящика 523.
На фиг. 29 показан вид в перспективе полки 410 стеллажа с расположенными на нижней стороне группами датчиков и продолжающимися сквозь контактную поверхность для складируемых грузов G сигнальными отверстиями 315. Дополнительно полка стеллажа разделена на несколько отделений параллельными относительно групп датчиков разделительными элементами 330. Продолжающаяся по периметру полки со всех сторон рама предотвращает боковое падение складируемых грузов G.
На фиг. 30 показано выполненное в виде стеллажа 400 устройство 300 складирования с первой полкой 410 для размещения складируемых грузов, а также дополнительными полками 410, при этом на основании взаимного расположения в пространстве в каждом случае между двумя полками 410 определено контролируемое пространство R, на нижней части полки 410 которого, находящейся в каждом случае сверху, располагается большое количество групп 100 датчиков.
На фиг. 31 изображено сечение стеллажа 400 с всего тремя полками и двумя контролируемыми пространствами R. Сечение продолжается через группу 100 датчиков на высоте располагающихся в одну линию чувствительных элементов 20. В каждом случае на нижней стороне полки находится одна группа датчиков, при этом источники 21 сигнала ориентированы сверху вниз, а приемники 22 сигнала - снизу вверх. С одной стороны полки расположены под наклоном, который обеспечивает закрытие образовавшегося после изъятия складируемого груза G, например, пакета с винтами, свободного пространства спускающимися последующими пакетами, благодаря чему в передней части, в точке отбора, в распоряжении всегда имеется один пакет, пока в соответствующем отделении с товаром не закончатся пакеты. Имеющиеся в отделении для хранения пакеты препятствуют приему испускаемых расположенными над пакетами источниками 21 сигналов S приемниками 22, закрытыми этими пакетами, так что переданный, но не принятый сигнал S интерпретируется как первое состояние загрузки «В наличии». В тех местах, где отсутствуют пакеты, сигнал S может быть принят, что интерпретируется как второе состояние загрузки «Пусто». Запрос отдельных состояний загрузки производится либо периодически, либо при наступлении какого-либо события, например, подачи запроса вручную, а полученная информация передается в высокоуровневую систему управления, которая на основании места хранения или, соответственно, привязки контролируемого пространства или его участков ТВ к определенным товарам выполняет перенос остатков и, при необходимости, запускает процессы заказа.
Если известны длина отдельных предметов или, соответственно, количество предметов на единицу длины, то может быть, например, рассчитано и количество предметов на соответствующем участке ТВ. Например, длина отдельных предметов может быть уже известной или она может быть определена и сохранена в процессе наладки стеллажа 400. Например, может быть определена позиция последнего чувствительного элемента с состоянием загрузки «В наличии» или, соответственно, позиция первого чувствительного элемента с состоянием загрузки «Пусто». Затем может быть вручную введено количество предметов. В зависимости от расстояния между отдельными чувствительными элементами на основе этой информации возможны расчет размеров отдельных предметов и, тем самым, более точное определение количества предметов на участке при извлечении отдельных предметов.
В качестве альтернативы позиция последнего чувствительного элемента с состоянием загрузки «В наличии» или, соответственно, позиция первого чувствительного элемента с состоянием загрузки «Пусто» могут быть сохранены. Для проверки наличия минимального количества соответствующих предметов может быть достаточно сделать запрос у чувствительного элемента, закрепленного за данной позицией. Это позволит в значительной мере сократить время на выполнение запроса. К примеру, в рамках наладки системы стеллажей может осуществляться загрузка минимального количества объектов с последующим определением позиции последнего датчика, показывающего наличие, либо, соответственно, позиции первого чувствительного элемента, показывающего отсутствие.
На фиг. 32 и 33 показана складская система 600 с несколькими, например, изображенными на фиг. 31 стеллажами 400. Каждый стеллаж 400 включает несколько полок 310, каждая из которых разделена на несколько участков или отделений ТВ. В случае со стеллажами 400 речь может идти о стеллажах с наклонными полками 310, как показано на фиг. 31а и 31b, которые наклонены в направлении загрузки или, соответственно, в направлении отбора. Каждое из отделений ТВ продолжается в направлении отбора, так что расположенные на полках 310 предметы скользят в направлении переднего, более низкого конца полок 310.
Складская система 600 дополнительно включает систему 200 датчиков, состоящую из нескольких групп 100 датчиков, при этом за каждым отделением ТВ закреплена одна группа 100 датчиков. Каждая из групп 100 датчиков выполнена для определения загрузки отделений ТВ и генерирования информации о наличии. Каждому отделению ТВ присвоен уникальный адрес, указанный на штрих-коде 680 на передней стороне отделения.
Дополнительно предусмотрена шина 620 передачи данных, соединенная с устройством 630 связи, которое может создавать сетевое подключение 640 к серверу 650. С помощью сетевого подключения 640 устройство 630 связи может отправлять на сервер 650 полученную по шине данных информацию о наличии, а также связанный с этой информацией адрес отделений ТВ. Кроме того, с помощью сетевого подключения 640 устройство 630 связи может принимать от сервера 650 используемую для управления информацию. Примерами используемой для управления информации являются инструкции проведения инвентаризации или информация о выполнении дистанционного обслуживания.
Складская система дополнительно включает ручной сканер 670 для оптической регистрации оптически считываемого кода, при этом каждое из отделений ТВ имеет оптически считываемый код, в котором зашифрован соответствующий адрес. Конфигурация устройства связи настроена так, что назначение типа предмета одному или нескольким отделениям ТВ осуществляется путем принятия устройством 630 связи от ручного сканера 670 оптически считанного адреса и соотнесенного с этим оптически считанным адресом типа предмета.
Ручной сканер может использовать беспроводную систему связи и включать беспроводной интерфейс связи для обмена данными с устройством связи.
Дополнительно отделения включают средства 690 сигнализации, подающие оптический сигнал, например, в момент приема сигнала несоответствия загрузки, что оптическим способом информирует пользователя о несоответствии загрузки.
Для наладки складской системы 600 устройство 630 связи сначала переводится в режим наладки. После этого в соответствии с предварительно заданной схемой раскладки 700 производится загрузка отделений ТВ складской системы 600 минимальным количеством предметов, при недостижении которого должен начинаться процесс дозаказа, а также регистрация минимального количества предметов системой 200 датчиков и сохранение этих значений в устройстве связи. Затем выполняется загрузка складской системы 100 предметами до заданной величины остатков.
Эксплуатация организованной складской системы 600 осуществляется в соответствии со следующими этапами:
- регистрация информации 710 о наличии предметов по меньшей мере в одном из отделений ТВ;
- сравнение устройством 630 связи полученной информации 710 о наличии с сохраненной схемой раскладки;
- если устройство 630 связи обнаружило расхождения между полученной информацией о наличии предметов и схемой раскладки, то устройство 630 связи генерирует сигнал несоответствия загрузки и отправляет его по шине данных по адресу той группы 100 датчиков, от которой была получена информация о наличии.
Ход организации и эксплуатации складской системы 600 дополнительно изображен в виде схемы на фиг. 33 и 34.
Складская система 100 может распознавать состояние загрузки непрерывно или периодически, например, чтобы протоколировать текущие остатки товара с сохранением информации о наличии в устройстве 630 связи. В качестве альтернативы распознавание состояния загрузки может производиться только в установленное время или по запросу. Например, путем назначения срока проведения инвентаризации, при наступлении которого складская система автоматически проводит инвентаризацию, то есть распознавание состояния загрузки всех отделений ТВ.
На устройстве 630 связи установлен программный модуль 720 дистанционного обслуживания, доступ к которому может осуществляться по сети и который позволяет выполнять операции обслуживания непосредственно на складской системе. Конфигурация программного модуля дистанционного обслуживания может быть настроена таким образом, что по полученной по сети команде имеется возможность определенного воздействия на систему 200 датчиков, в результате чего осуществляется получение информации о наличии предметов в отделении ТВ, адрес которого был указан в команде, а на основе этой информации генерируется сигнал о наличии, отправляемый по сети.
Устройство 630 связи предназначено для подключения компьютера 730 с помощью локального соединения с целью последующей визуализации сохраненной в устройстве 630 связи схемы 700 раскладки посредством пользовательского интерфейса на компьютере.
Устройство 630 связи дополнительно имеет режим наладки, при этом зарегистрированное в режиме наладки с помощью системы 200 датчиков состояние загрузки складской системы 600 может быть сохранено как схема раскладки, в которой содержится информация, согласно зарегистрированному системой датчиков состоянию загрузки, в частности, о типе предметов, назначенных для каждого отделения ТВ, и о пороговом значении, присвоенном системой 200 датчиков для каждого типа предметов.
Полки 310 стеллажа могут включать в направлении загрузки отделений ТВ, в частности, в направлении наклона, несколько отверстий для приема и/или передачи сигналов системой 200 датчиков, при этом группы 100 датчиков системы 200 датчиков расположены под полками 310 стеллажей и покрыты пленкой, нанесенной в направлении загрузки на верхнюю сторону полки 310 и перекрывающей отверстия.
В случае с пленкой речь идет, например, о пленке из полимерного материала, в частности, пленке из ПВХ, при этом эта полимерная пленка не создает препятствий, в частности, в диапазоне частот приема и/или передачи сигнала.
Далее описываются дополнительные признаки возможных вариантов осуществления изобретения, при этом эти признаки можно комбинировать между собой, а также с уже описанными признаками.
Группа (100) датчиков для распознавания состояния загрузки включает, например, несущий элемент (10) с по меньшей мере двумя чувствительными элементами (20), при этом чувствительные элементы (20) расположены на разных наружных поверхностях (11), (12), (13), (14) несущего элемента (10).
Сечение несущего элемента (10) имеет, к примеру, угловатую форму, предпочтительно, чтобы оно было треугольным или четырехугольным, в частности, квадратным или прямоугольным.
Несущий элемент (10) выполнен, например, в форме угла, круга, креста, буквы у, полосы, решетки, меандра и/или звезды.
Несущий элемент (10) выполнен, например, жестким, гибким или полугибким или обладает по меньшей мере двумя жесткими, гибкими или полугибкими участками (10)(а) (10)(b), соединенными между собой.
Несущий элемент (10) состоит, к примеру, из пленки или из нескольких слоев одинаковой или разной пленки и/или материалов.
Например, несущий элемент (10) по меньшей мере частично формирует печатную плату с токопроводящими дорожками (15) или по меньшей мере включает электропроводные структуры для обеспечения электрического контакта и/или передачи сигналов чувствительных элементов (20) и/или других электрических и/или электронных компонентов (23) и/или для соединения с шиной (24) передачи данных и/или с источником (25) питания и/или для соединения с по меньшей мере одной дополнительной группой (100) датчиков.
В каждом случае чувствительный элемент (20) выполнен, например, в виде источника (21) сигнала или в виде приемника (22) сигнала.
Рядом с приемником (22) сигнала расположен, например, источник (26) контрольных сигналов таким образом, что приемник (22) имеет возможность прямого или непрямого обнаружения сигналов соответствующего источника (26) контрольных сигналов.
По меньшей мере первый чувствительный элемент (20) (а) одной первой наружной поверхности (11), (12) группы (100) датчиков выполнен дополняющим, например, по меньшей мере второй чувствительный элемент (20) (b) второй наружной поверхности (13), (14) группы (100) датчиков, в частности, первый чувствительный элемент (20) (а) выполнен в виде источника (21) сигнала, а второй чувствительный элемент (20) (b) выполнен в виде приемника (22) сигнала, либо первый чувствительный элемент (20) (а) выполнен в виде приемника (22) сигнала, а второй чувствительный элемент (20) (b) выполнен в виде источника (21) сигнала.
По меньшей мере два чувствительных элемента (20) (а), (20) (b) выполнены, например, в дополнение друг к другу и в каждом случае расположены на противоположных друг другу наружных поверхностях (11), (13) или (12), (14) несущего элемента (10), в частности, первый чувствительный элемент (20) (а) выполнен в виде источника (21) сигнала на первой наружной поверхности (11), (12), а второй чувствительный элемент (20) (b) выполнен на второй, противоположной первой, наружной поверхности (13), (14) в виде приемника (22) сигнала или первый чувствительный элемент (20) (а) выполнен на первой наружной поверхности (11), (12) в виде приемника (22) сигнала, а второй чувствительный элемент (20) (b) выполнен на второй, противоположной первой, наружной поверхности (13), (14) в виде источника (21) сигнала.
Чувствительные элементы (20) расположены, например, на наружной поверхности (11), (12), (13), (14) несущего элемента (10) или по меньшей мере частично интегрированы в нее.
Сигнал, переданный по меньшей мере одним источником (21) и принятый по меньшей мере одним приемником (22), представляет собой, например, магнитный, электромагнитный или акустический сигнал.
Источник (21) сигнала включает, например, по меньшей мере один светодиод, один органический светодиод или один пьезокристалл, или он образован из матрицы таких элементов.
По меньшей мере один источник (21) сигнала испускает, например, свет в ИК-диапазоне.
По меньшей мере один чувствительный элемент (20) и/или одна токопроводящая дорожка (15) выполнены путем печати.
На несущем элементе (10) расположена, например, управляющая электроника (16), четко отличающая одну группу датчиков от другой группы датчиков.
Управляющая электроника (16), например, активирует чувствительные элементы (20) и регистрирует, обрабатывает и передает сигналы данных этих чувствительных элементов (20).
Например, частота и/или интенсивность сигнала, генерируемого управляющей электроникой (16) и подаваемого источником (21) сигнала, могут изменяться.
Испускаемый сигнал (S), например, подается импульсами, позволяющими кодировать этот сигнал (S).
Рабочее состояние, например, имеющихся чувствительных элементов (20) управляющая электроника (16) может активировать или запрашивать отдельно, группами или все вместе, в частности, источник сигнала подает сигнал или приемнику сигнала отправляется запрос, принимает ли он сигнал.
Например, по меньшей мере на одной наружной поверхности несущий элемент (10) включает более двух, предпочтительно, большое количество чувствительных элементов (20), расположенных в определенном порядке относительно друг друга, предпочтительно на по меньшей мере одной линии или в по меньшей мере один ряд.
Например, чувствительные элементы (20) совместно располагаются на наружной поверхности (11), (12), (13), (14) несущего элемента (10) группами и/или с чередованием для разных видов сигналов.
На одной из наружных поверхностей (11), (12), (13), (14) в каждом случае располагаются, к примеру, только чувствительные элементы одного вида, в частности, например, на одной соответствующей наружной поверхности (11), (12), (13), (14) чувствительные элементы (20) выполнены только в виде источников (21) сигнала или только в виде приемников (22) сигнала.
Источники (21) и приемники (22) сигнала располагаются, например, совместно на наружной поверхности (11), (12), (13), (14) несущего элемента (10) группами и/или с чередованием.
Например, для последующего позиционирования и/или выравнивания группы (100) датчиков имеется маркировка (40).
К примеру, для последующего позиционирования и/или крепления группы (100) датчиков предусмотрено устройство (40) фиксации.
Несущий элемент (10), например, включает на по меньшей мере одной наружной поверхности (11), (12), (13), (14) клейкую поверхность (30).
Эта клейкая поверхность (30) по меньшей мере временно закрыта отсоединяемой покрывной пленкой (31).
Система (200) датчиков для определения наличия объектов включает по меньшей мере две группы (100) (а), (100) (b) датчиков, при этом эти группы (100) (а), (100) (b) датчиков взаимно расположены в по меньшей мере одной позиции так, что они по меньшей мере частично включают одно контролируемое пространство (R) и что подаваемый сигнал (S) по меньшей мере одного источника (21) сигнала первой группы (100) (а) датчиков может быть обнаружен по меньшей мере одним приемником (22) сигнала второй группы (100) (b) датчиков в по меньшей мере одном состоянии (BZ) загрузки, благодаря чему принятый сигнал (S) интерпретируется как первое состояние (BZ) загрузки, а отправленный, но не принятый сигнал (S) интерпретируется как второе состояние (BZ) загрузки.
Группы (100) (а), (100) (b) датчиков взаимно расположены, например, в по меньшей мере одной позиции так, что по меньшей мере одна из их наружных поверхностей (14)(а), (12)(b) по меньшей мере частично находится на противоположной стороне и что на по меньшей мере частично находящихся на противоположной стороне наружных поверхностях (14) (а), (12) (b) в каждом случае располагается по меньшей мере один чувствительный элемент 20) (а), (20) (b), при этом они дополняют друг друга, в частности, по меньшей мере первый чувствительный элемент (20) (а) выполнен в виде источника (21) (а) сигнала, а по меньшей мере второй чувствительный элемент (20) (b) выполнен в виде приемника (22) (b) сигнала, либо по меньшей мере первый чувствительный элемент (20) (а) выполнен в виде приемника (22) (а) сигнала, а по меньшей мере второй чувствительный элемент (20) (b) выполнен в виде источника (21) (b) сигнала.
По меньшей мере у одной из групп (100) (b) датчиков, например, на по меньшей мере одной не обращенной к другой группе (100) (а) датчиков наружной поверхности (11) (b), (13) (b), (14) (b) располагается по меньшей мере один дополнительный чувствительный элемент (20) (с).
По меньшей мере у одной из групп (100) (b) датчиков, например, соответственно, на отдаленной от другой группы (100) (а) датчиков наружной поверхности (14) (b) располагается по меньшей мере один дополнительный чувствительный элемент (20) (с).
По меньшей мере один дополнительный чувствительный элемент (20) (с) является, например, дополнением к виду по меньшей мере одного чувствительного элемента (20) (b) на по меньшей мере обращенной к другой группе (100) (а) датчиков наружной поверхности (12) (b), в частности, чувствительный элемент (20) (b) выполнен в виде источника сигнала, а чувствительный элемент (20) (с) выполнен в виде приемника сигнала, либо чувствительный элемент (20) (b) выполнен в виде приемника сигнала, а чувствительный элемент (20) (с) выполнен в виде источника сигнала.
В каждом случае в отношении расположения по меньшей мере двух групп (100) (а), (100) (b) датчиков, например, чувствительные элементы (20) одного вида (21), (22) имеют одинаковую ориентацию (OR), в частности, чтобы все источники (21) сигнала были ориентированы в первом направлении (OR) (21), а все приемники (22) сигнала - во втором направлении (OR) (22).
Первое направление (OR) (21) и второе направление (OR) (22) ориентированы, например, противоположно друг другу.
На одной наружной поверхности (11), (12), (13), (14) одной группы (100) датчиков или одного участка (10) (а), (10) (b) одной группы (100) датчиков с чувствительным элементом (20) располагаются, к примеру, по меньшей мере два чувствительных элемента (20), предпочтительно большое их количество.
Чувствительные элементы (20) по меньшей мере двух соседних групп (100) (а), (100) (b) датчиков в каждом случае размещаются, например, приблизительно на одной общей оси (А).
На обращенных друг к другу наружных поверхностях (14) (а), (12) (b) одной группы (100) датчиков или одного участка одной группы (10) (а), (10) (b) датчиков с чувствительными элементами (20) в каждом случае располагаются, например, только чувствительные элементы (20) одного вида, в частности, размещенные на одной соответствующей наружной поверхности (14) (а), (12) (b) чувствительные элементы (20) выполнены только в виде источников (21) сигнала или только в виде приемников (22) сигнала.
Чувствительные элементы (20), например, отстоят друг от друга настолько, что на каждую измеряемую единицу минимального размера приходится по меньшей мере одна пара чувствительных элементов (20), в частности, что для каждой измеряемой единицы минимального размера в наличии имеется по меньшей мере один источник
(21) сигнала и один приемник (22) сигнала, предпочтительно, чтобы на каждую измеряемую единицу минимального размера приходилось несколько источников (21) сигнала и несколько приемников (22) сигнала.
Управляющая электроника (260) в каждом случае координирует, например, работу дополняющих друг друга и совместно действующих чувствительных элементов (20) по меньшей мере двух групп (100) (а), (100) (b) датчиков или разных групп датчиков попарно или группами, в частности, синхронизирует их друг с другом и, в частности, управляет передачей и приемом сигналов S.
Контролируемое пространство (R) разделено, например, на по меньшей мере два участка (ТВ), логически управляемых соответствующим образом управляющей электроникой (260), в частности, по меньшей мере один источник (21) (а) сигнала и один приемник (22) (а) сигнала или одна группа дополняющих друг друга и совместно действующих чувствительных элементов (20) (а), (b) закреплены за первым участком (ТВ) (1) и по меньшей мере один дополнительный источник (21) (b) сигнала и один дополнительный приемник (22) (b) сигнала либо группа других дополняющих друг друга и совместно действующих чувствительных элементов (20) (b) закреплены за другим участком (ТВ) (2).
Управляющая электроника (260), например, анализирует полученные сигналы и с помощью устройства (270) связи передает эти сигналы и/или вычисленные данные о состоянии BZ загрузки в высокоуровневое устройство (300) складирования или в высокоуровневый блок (360) управления.
Устройство (300) складирования грузов (G) и управления ими, в частности, штучных и/или сыпучих грузов, включает по меньшей мере одно контролируемое пространство (R) для размещения грузов (G) и одну описанную выше систему (200) датчиков.
Состояние (BZ) загрузки и/или уровень (FG) заполнения контролируемого пространства (R) контролируют, например, по меньшей мере два расположенных примерно на противоположных сторонах чувствительных элемента (20) (а), (20) (b), при этом полученный в по меньшей мере одном состоянии (BZ) загрузки сигнал (S) по меньшей мере одного источника (21) (а) сигнала первой группы (100) (а) датчиков может быть обнаружен по меньшей мере одним приемником (22) (b) сигнала второй группы (100) (b) датчиков так, что полученный сигнал (S) интерпретируется как первое состояние (BZ) загрузки, а отправленный, но не полученный, или полученный в затухшем виде сигнал (S) интерпретируется как второе состояние (BZ) загрузки, при этом комбинация нескольких состояний загрузки может быть интерпретирована как уровень (FG) заполнения.
Контролируемое пространство (R), например, по меньшей мере частично ограничено по меньшей мере двумя ограничивающими элементами (310) (а), (310) (b) или по меньшей мере двумя участками (321), (322) ограничивающего элемента (310), при этом ограничивающие элементы (310) (а), (310) (b) или участки (321), (322) по меньшей мере частично находятся на приблизительно противоположных сторонах по меньшей мере одной наружной поверхности.
На каждом ограничивающем элементе (310) (а), (310) (b) или на каждом участке (321), (322) располагается, к примеру, по меньшей мере одна группа (100) датчиков.
По меньшей мере одна группа (100) (а) датчиков расположена, например, на обращенной к контролируемому пространству (R) наружной поверхности (311) (а) ограничивающего элемента (310) (а).
По меньшей мере одна группа (100) (b) датчиков расположена, например, на отдаленной от контролируемого пространства (R) наружной поверхности (311) (b) ограничивающего элемента (310) (b).
По меньшей мере на одной стороне контролируемого пространства (R), например, по меньшей мере одна группа (100) (b) датчиков по меньшей мере частично интегрирована в соответствующий ограничивающий элемент (310) (b).
Ограничивающий элемент (310) включает, например, по меньшей мере одно сигнальное отверстие (315), благодаря которому по меньшей мере одна интегрированная или по меньшей мере одна расположенная на отдаленной от контролируемого пространства (R) наружной поверхности группа (100) (b) датчиков может отправлять сигнал (S) сквозь сигнальное отверстие (315) по меньшей мере одной дополнительной группе (100) (с) датчиков и/или принимать сигнал от по меньшей мере одной дополнительной группы (100) (а) датчиков.
Сигнальное отверстие (315), например, по меньшей мере частично заполнено чувствительным элементом (20) и/или сигнальное отверстие (315), например, по меньшей мере частично закрыто и/или заполнено пропускающим сигнал материалом.
По меньшей мере один ограничивающий элемент (310) включает, например, одно приспособление или одно углубление (316) для по меньшей мере частичного размещения по меньшей мере одной группы (100) датчиков.
Приспособление или углубление (316) включает на по меньшей мере одной наружной поверхности, например, одно отверстие (317) для установки ограничивающего элемента 310.
По меньшей мере одна группа датчиков, например, зафиксирована в определенной позиции на по меньшей мере одном ограничивающем элементе относительно опорной точки (В) устройства (300) складирования и/или ограничивающего элемента 310 и/или по меньшей мере одной другой группы (100) датчиков.
По меньшей мере одна группа (100) датчиков приклеена, например, к по меньшей мере одному ограничивающему элементу (310).
По меньшей мере две группы (100) датчиков, предпочтительно большое их количество, расположены приблизительно параллельно друг другу на ограничивающем элементе (310), при этом расположенные на одной плоскости чувствительные элементы формируют матрицу датчиков.
На по меньшей мере двух расположенных на противоположных сторонах и, тем самым, приблизительно параллельных друг другу ограничивающих элементах (310) размещены по меньшей мере один разделительный элемент (330), предпочтительно несколько, при этом эти разделительные элементы (330) продолжаются перпендикулярно ограничивающим элементам (310), так что формируется по меньшей мере два контролируемых пространства (Rn), предпочтительно большое их количество.
На по меньшей мере одном ограничивающем элементе (310) на по меньшей мере одной наружной поверхности (311) присутствует по меньшей мере одно устройство (325) фиксации для по меньшей мере одного разделительного элемента (330).
Например, на по меньшей мере одной стороне ограничивающего элемента (310) расположено большое количество устройств (325) фиксации, что обеспечивает разделение контролируемого пространства (R) на изменяемые участки.
За каждым контролируемым пространством (Rn) закреплены, к примеру, по меньшей мере один источник (21) сигнала и один приемник (22) сигнала.
Устройство (300) складирования представляет собой, например, стеллаж (400), а по меньшей мере один первый ограничивающий элемент (310) образует одну полку (410).
Например, дополнительные ограничивающие элементы (310) образуют в каждом случае дополнительные уровни (RE) стеллажа (400), при этом пространство между двумя соответствующими уровнями (RE) (a), (RE) (b) образует по меньшей мере одно контролируемое пространство (R).
Например, по меньшей мере одна группа (100) датчиков располагается под соответствующей полкой (410) одного уровня (Е) стеллажа в соответствии с направлением воздействия силы (F) тяжести.
Например, чувствительные элементы (20) разных уровней (RE) стеллажа выровнены на группе (100) датчиков в соответствии с их конкретной позицией в каждом случае приблизительно на одной общей оси (А), продолжающейся вертикально в соответствии с направлением воздействия силы (F) тяжести.
Чувствительные элементы (20) на разных уровнях (RE) стеллажа ориентированы в соответствии с их видом в каждом случае только в одном направлении (OR), в частности, все источники (21) сигнала на разных уровнях ориентированы только в одном первом направлении (OR) (21) и все приемники (22) сигнала на разных уровнях ориентированы только в одном втором направлении (OR) (22).
Например, все источники (21) сигнала ориентированы в соответствии с направлением воздействия силы (F) тяжести сверху вниз, а все приемники (22) сигнала - наоборот, снизу вверх.
Полка стеллажа на одном соответствующем уровне (RE) стеллажа расположена под наклоном в по меньшей мере одном направлении, например, относительно горизонтальной плоскости (Е) пространства.
Устройство (300) складирования представляет собой шкаф (500) с по меньшей мере одним выдвижным ящиком (501), при этом по меньшей мере две соответствующие противоположные боковые стенки (510) выдвижного ящика по меньшей мере частично ограничивают контролируемое пространство (R), выступая в качестве ограничивающих элементов (310) (а), (310) (b).
По меньшей мере одна группа (100) датчиков интегрирована, например, в по меньшей мере один ограничивающий элемент, образующий боковую стенку.
Например, чувствительные элементы (20) разных ограничивающих элементов (310) выровнены на группе (100) датчиков в соответствии с их конкретной позицией в каждом случае приблизительно на одной общей оси (А), продолжающейся приблизительно горизонтально, перпендикулярно направлению воздействия силы (F) тяжести.
Чувствительные элементы (20) на разных ограничивающих элементах ориентированы в соответствии с их видом в каждом случае только в одном направлении (OR), в частности, все источники (21) сигнала на разных ограничивающих элементах ориентированы только в одном первом направлении (OR 21) и все приемники (22) сигнала на разных ограничивающих элементах ориентированы только в одном втором направлении (OR 22).
Например, все источники (21) сигнала ориентированы по направлению выдвигания ящика (501) от его задней к передней стенке, а все приемники (22) сигнала ориентированы в противоположном направлении от передней стенки к его задней стенке.
Например, предусматривается по меньшей мере один дополнительный ограничивающий элемент (310 с), расположенный перпендикулярно направлению выдвигания выдвижного ящика (501).
Например, предусматривается по меньшей мере один разделительный элемент (330), расположенный параллельно направлению выдвигания выдвижного ящика (501).
Выдвижной ящик 501 включает, например, один штекер 523, обеспечивающий электрическое соединение ящика 501 по меньшей мере в его закрытом состоянии с источником питания и/или с находящейся в корпусе шкафа 500 линией передачи данных.
Например, блок (360) управления запрашивает по меньшей мере одно состояние BZ загрузки по меньшей мере одного контролируемого пространства (R) или участка (ТВ) разделенного контролируемого пространства, анализирует результат и/или передает его в высокоуровневую систему (660) управления.
Блок (360) управления логически управляет, например, по меньшей мере двумя взаимодействующими чувствительными элементами (20) по меньшей мере двух разных групп (100) датчиков или по меньшей мере части взаимодействующих матриц датчиков, и, таким образом, задает по меньшей мере один логический участок (ТВ), продолжающийся на одном уровне вдоль направления размещения первой группы датчиков и/или перпендикулярно направлению размещения первой группы датчиков через по меньшей мере одну дополнительную группу датчиков, расположенную параллельно.
Например, по меньшей мере один участок точно соответствует одной единице складируемого груза (G).
Например, по меньшей мере один логический участок (ТВ) соответствует по меньшей мере одному комплексу из ограничивающих элементов (310) и/или разделительных элементов (330), в частности, размеру по меньшей мере одного участка (ТВ), образованного ограничивающими элементами (310) и/или разделительными элементами (330).
Например, в процессе инициализации блок (360) управления регистрирует участки (ТВ) на основании взаимного расположения ограничивающих элементов (310) и/или разделительных элементов (330) и соответствующим образом разделяет по меньшей мере одно контролируемое пространство (R) на логические участки (ТВ) и сохраняет эту информацию в системе (660) управления.
Список номеров позиций
100 Группа датчиков
10 Несущий элемент
11 Наружная поверхность
12 Наружная поверхность
13 Наружная поверхность
14 Наружная поверхность
15 Токопроводящая дорожка
16 Управляющая электроника
20 Чувствительный элемент
21 Источник сигнала
22 Приемник сигнала
23 Электрические/электронные компоненты
24 Шина передачи данных
25 Источник питания
26 Источник контрольных сигналов
30 Клейкая поверхность
31 Покрывная пленка
32 Защитный слой/защитная пленка
40 Метка/место фиксации
200 Система датчиков
260 Управляющая электроника
270 Устройство связи
300 Устройство складирования
310 Ограничивающий элемент
311 a, b, с, d,е, f Наружные поверхности ограничивающего элемента
315 Сигнальное отверстие для пропускания сигналов
316 Углубление
317 Отверстие для вставки
321 Участок ограничивающего элемента
322 Участок ограничивающего элемента
325 Устройство фиксации для разделительного элемента
326 Контакт устройства фиксации
327 Электропроводка и линия передачи данных
330 Разделительный элемент
331 Контакт
360 Блок управления
400 Стеллаж
410 Полка стеллажа
500 Шкаф
501 Выдвижной ящик
510 а, b, с, d Боковые стенки
523 Штекер выдвижного ящика
524 Шина передачи данных
525 Источник питания
600 Складская система
620 Шина передачи данных
630 Устройство связи
640 Сетевое подключение
650 Сервер
660 Система управления
670 Ручной сканер
680 Оптически считываемый код
690 Средство сигнализации
700 Схема раскладки
710 Информация о наличии
720 Модуль дистанционного обслуживания
730 Компьютер
А Ось
В Опорная точка
BZ Состояние загрузки
Е Уровень
F Сила тяжести
G Складируемый груз
OR Ориентация
R Контролируемое пространство
S Сигнал
TB Участок
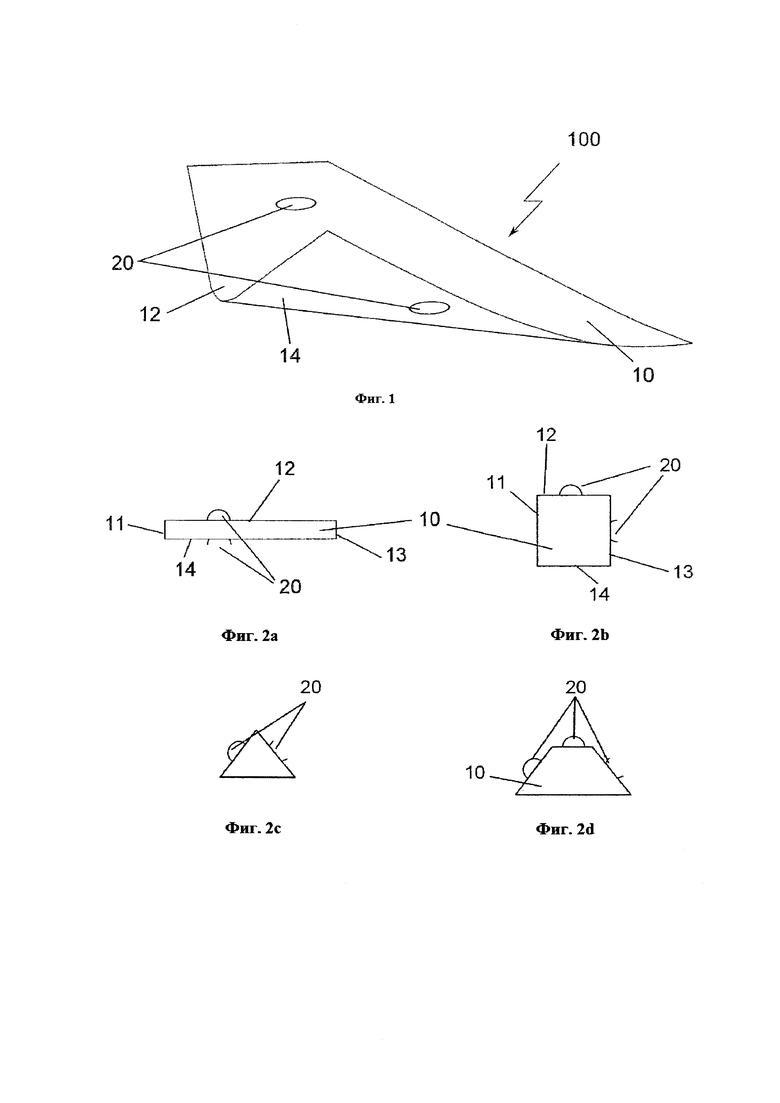
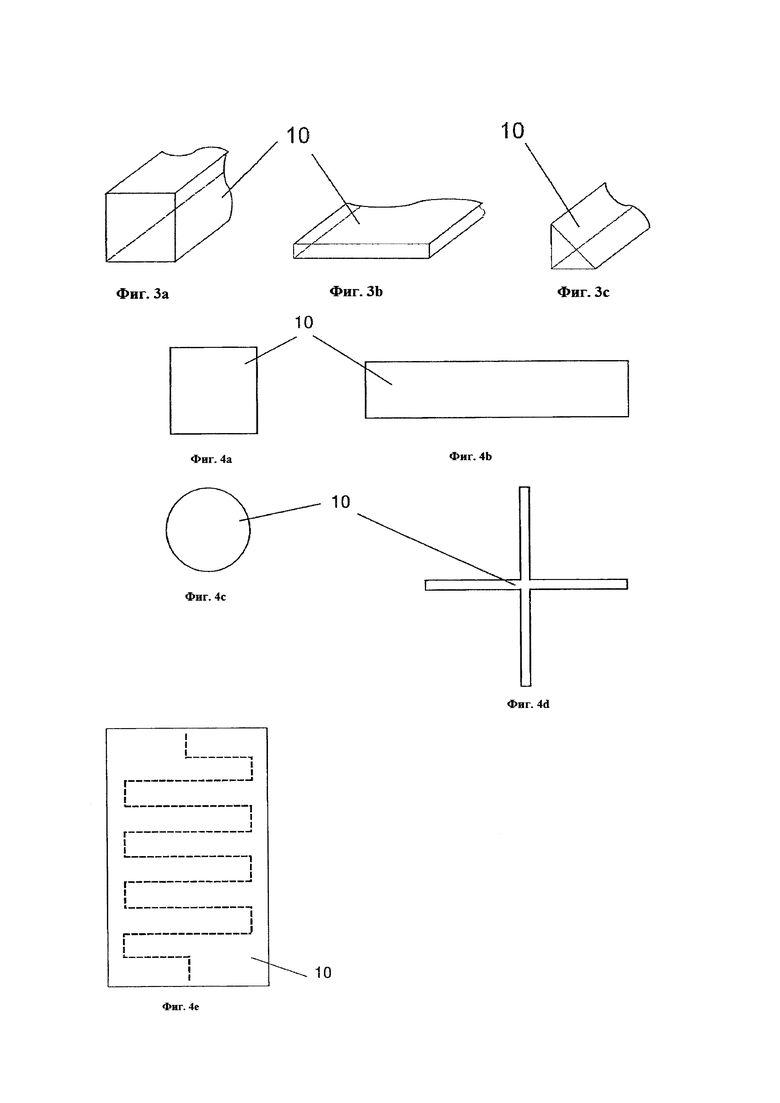
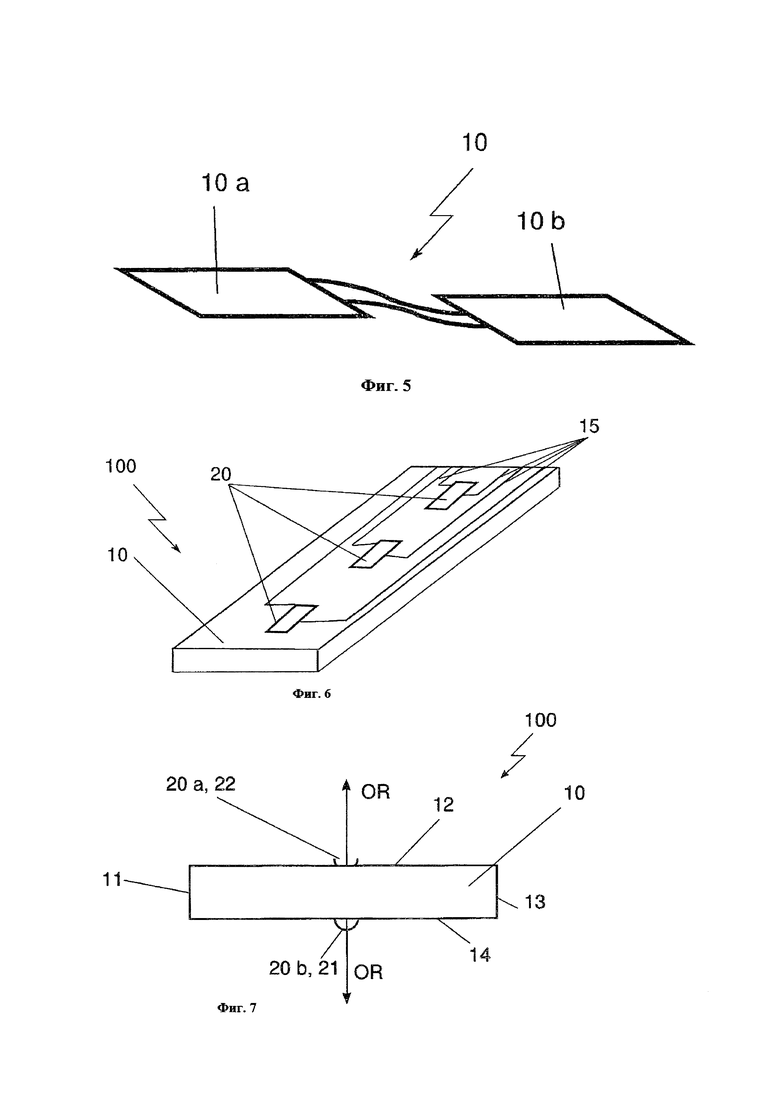
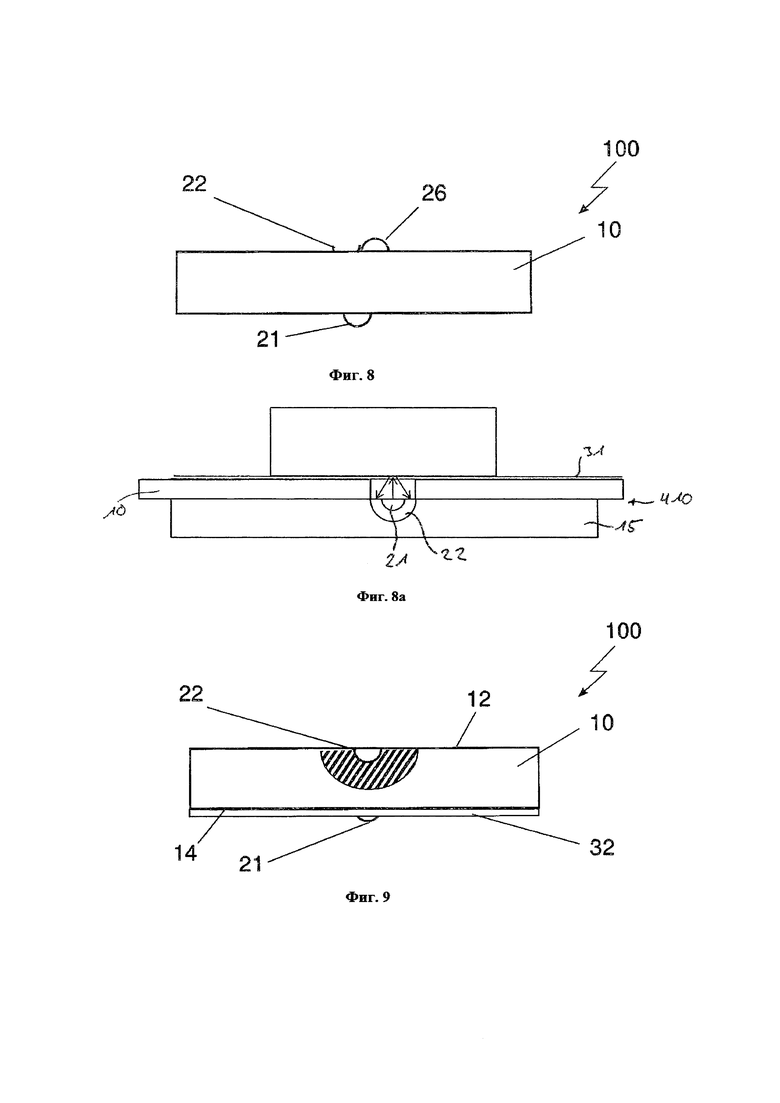
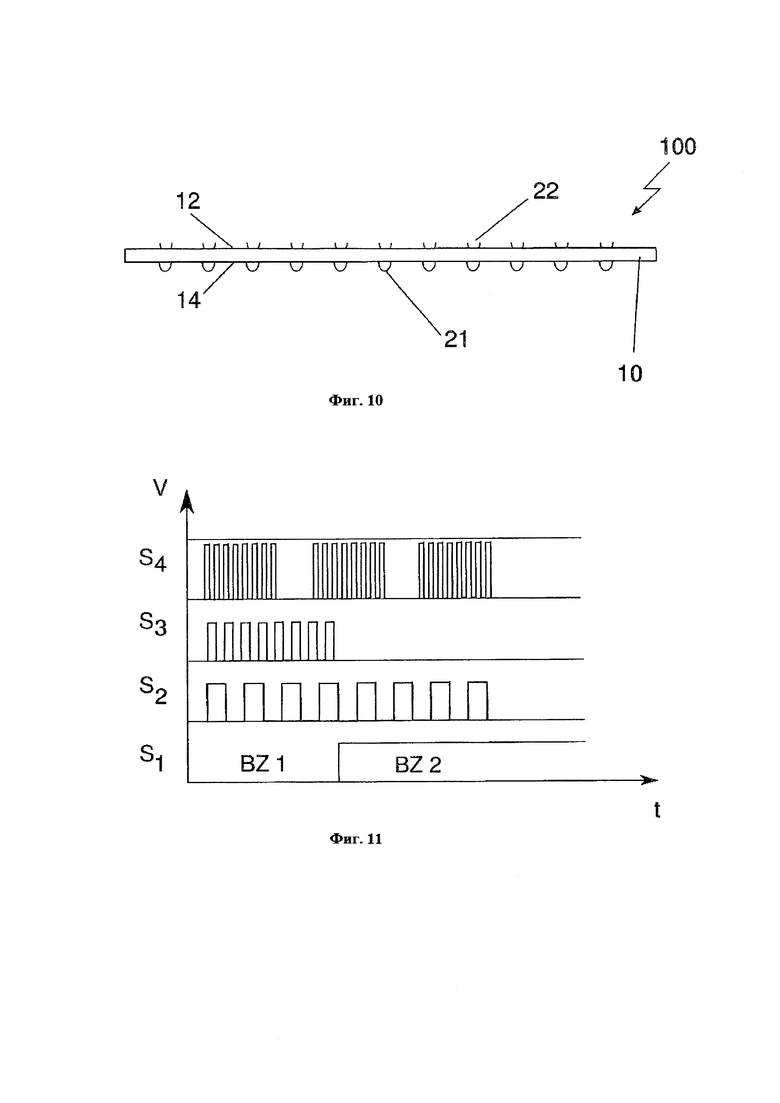
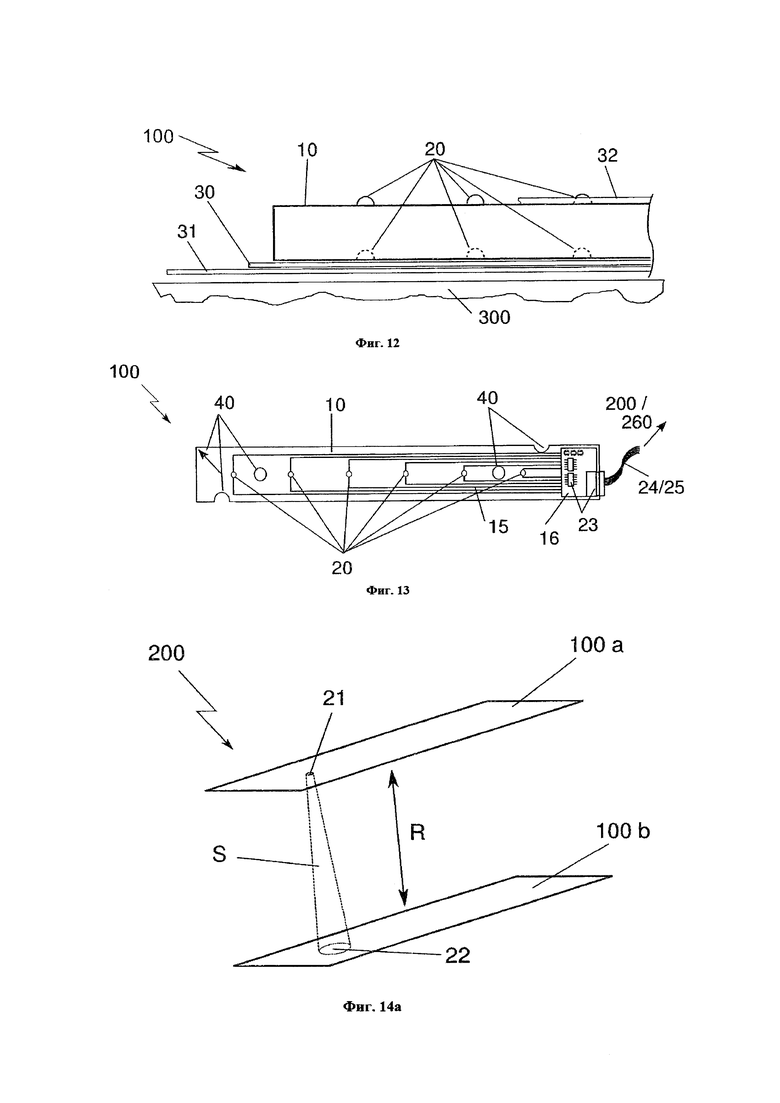
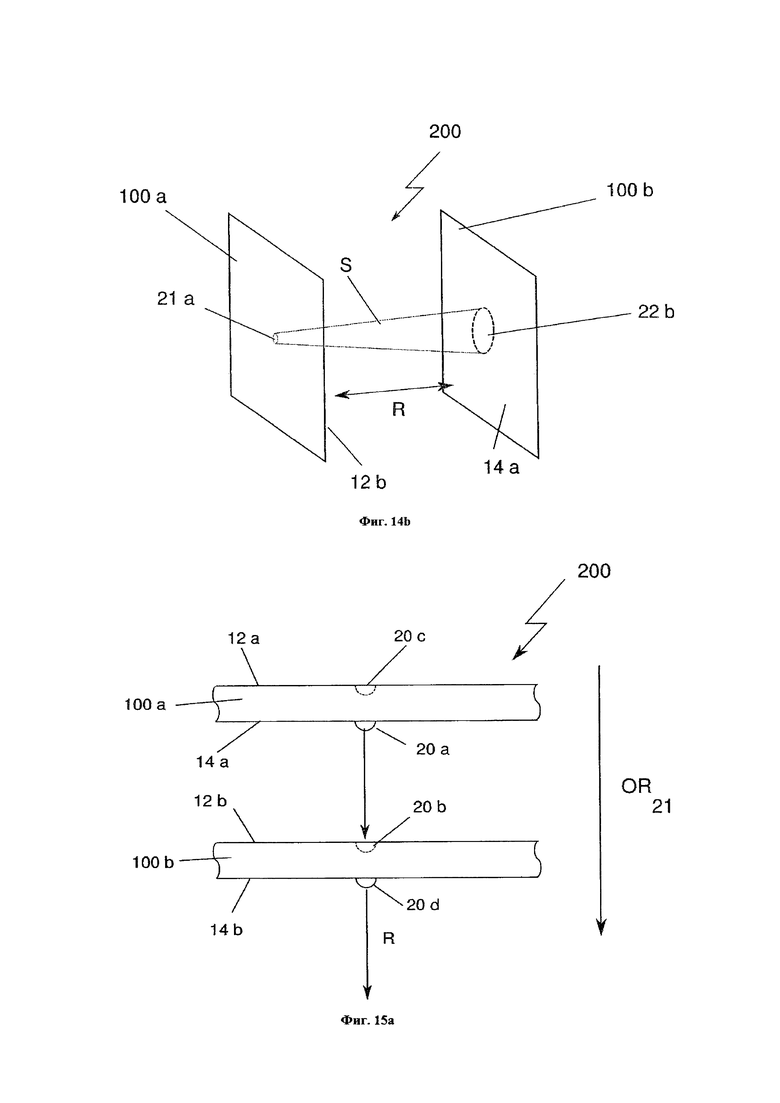
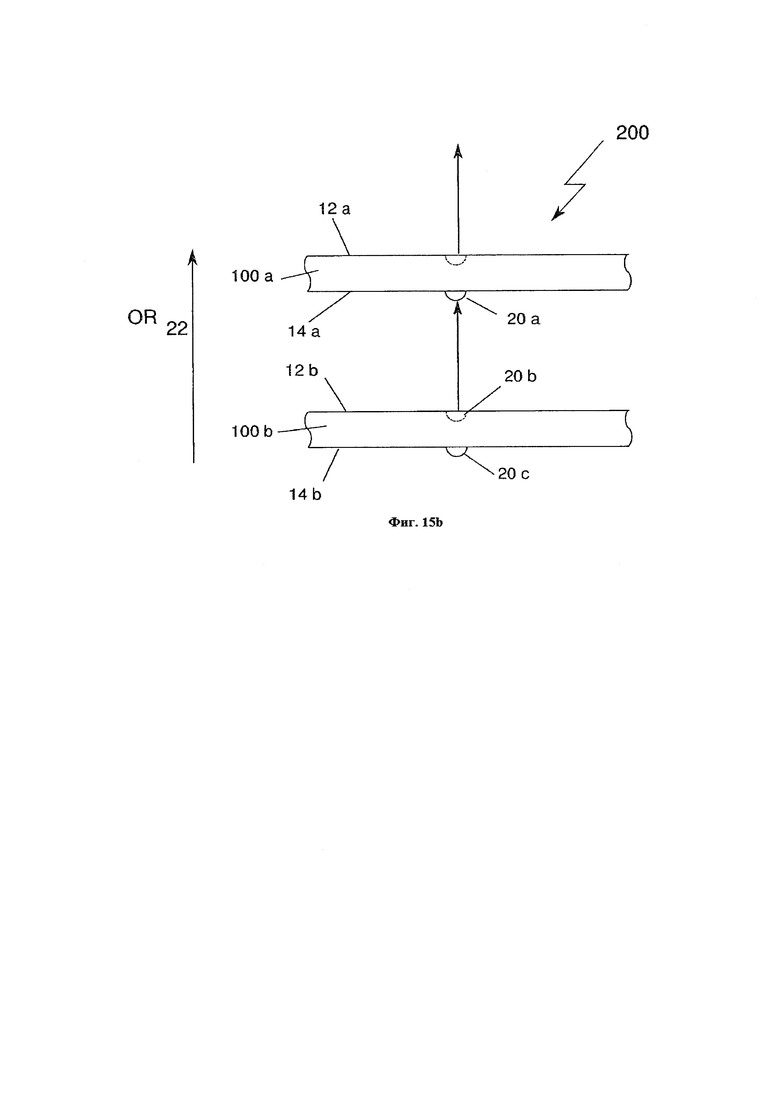
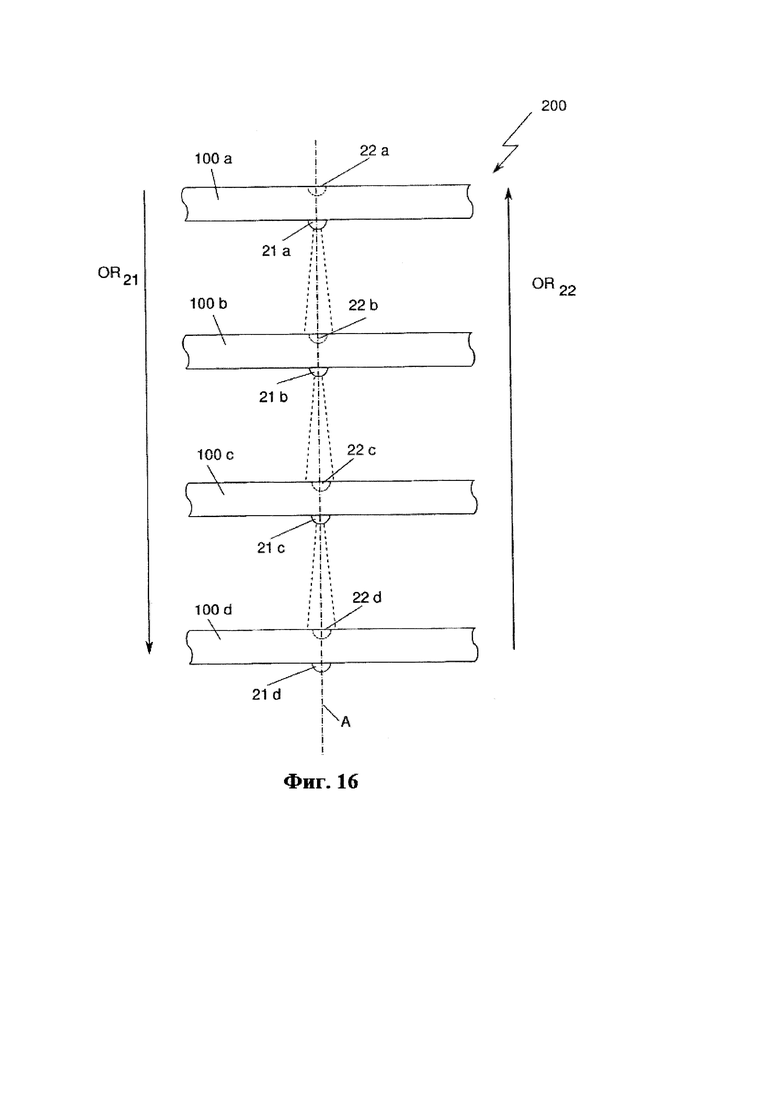
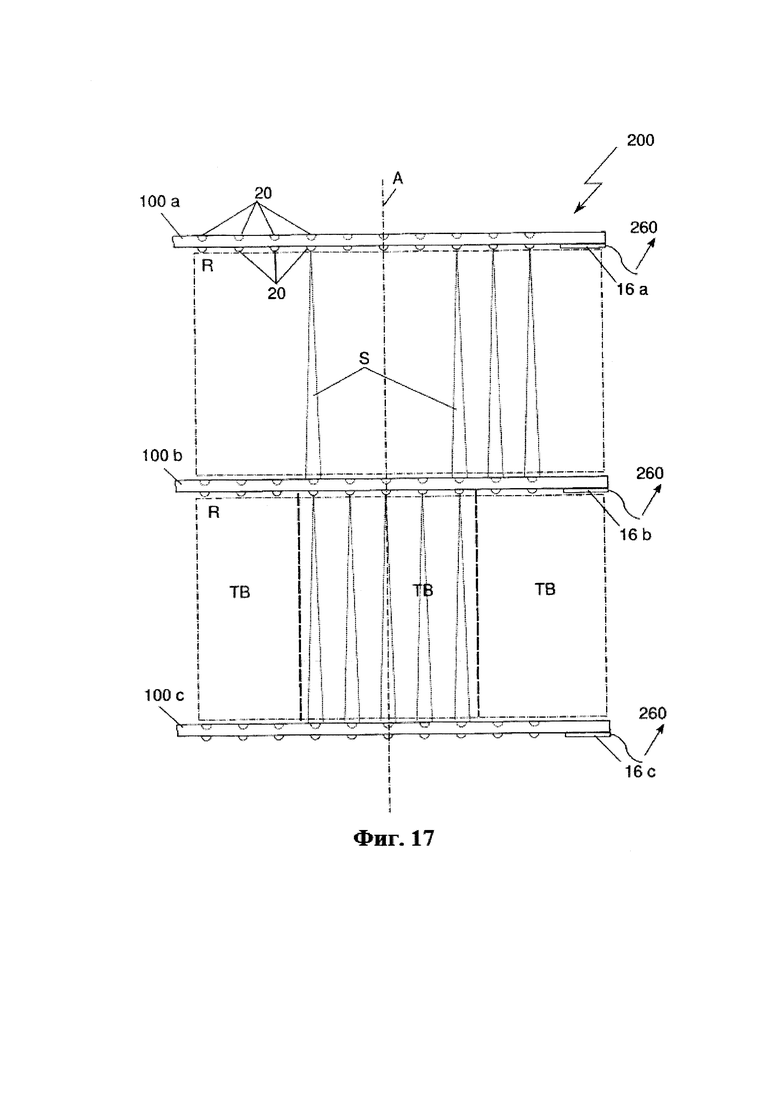
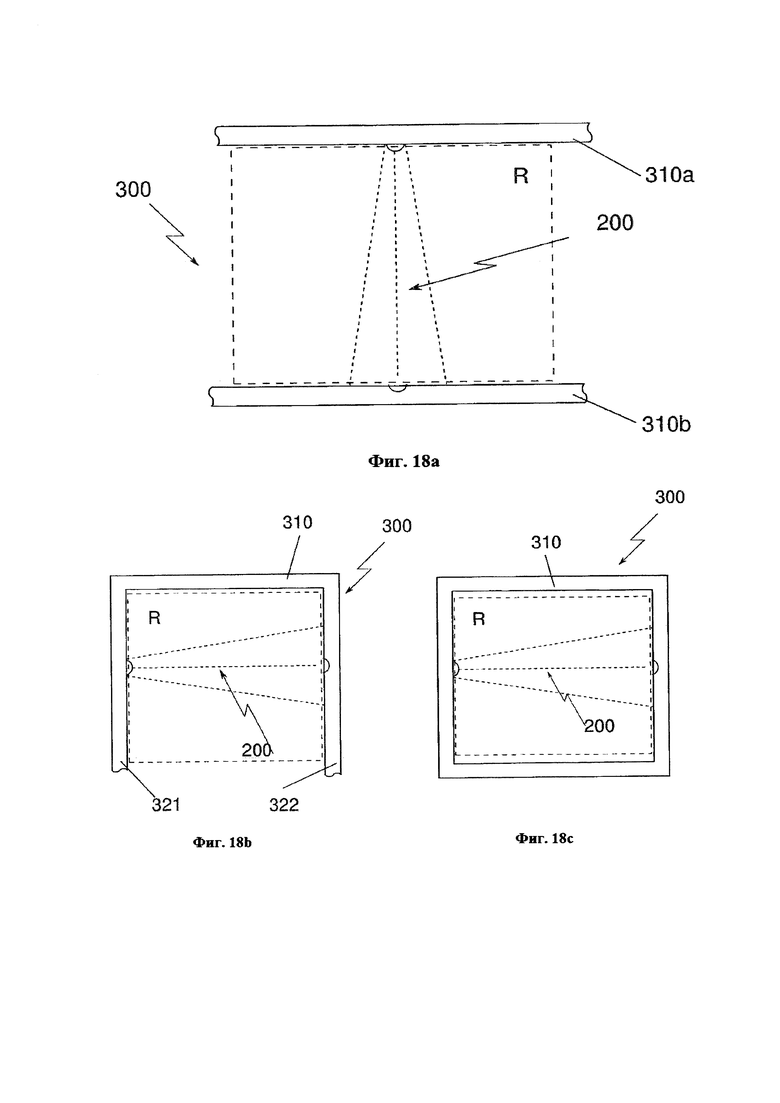
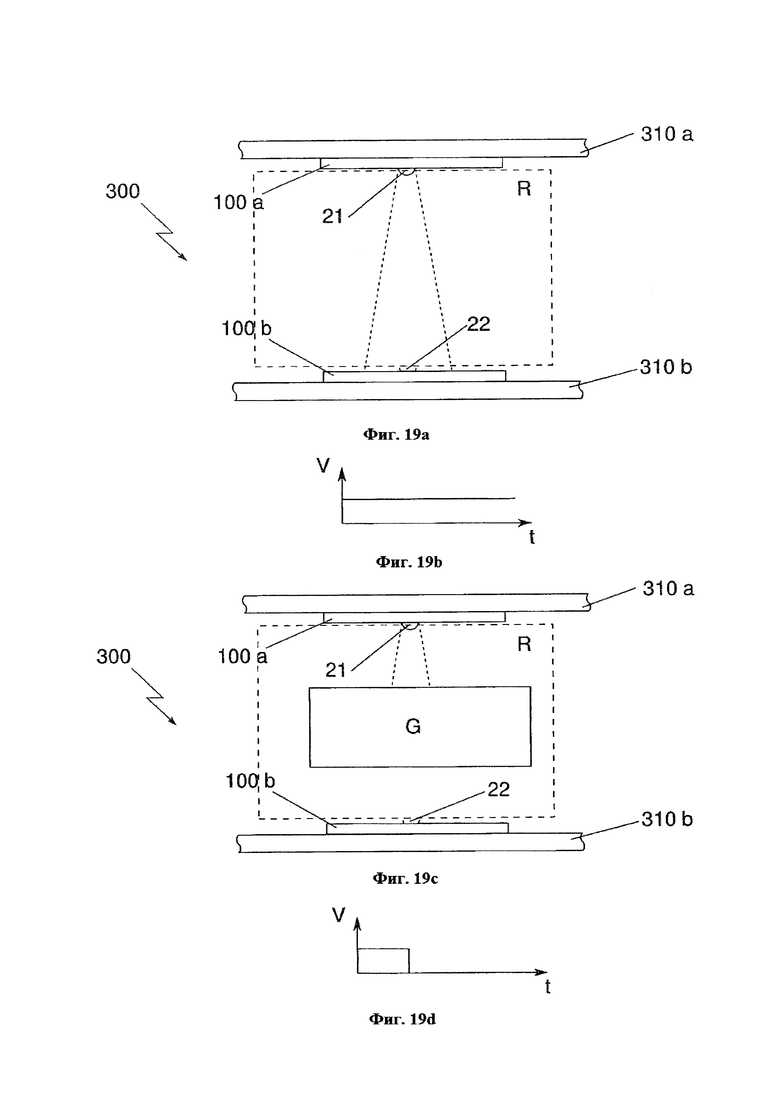
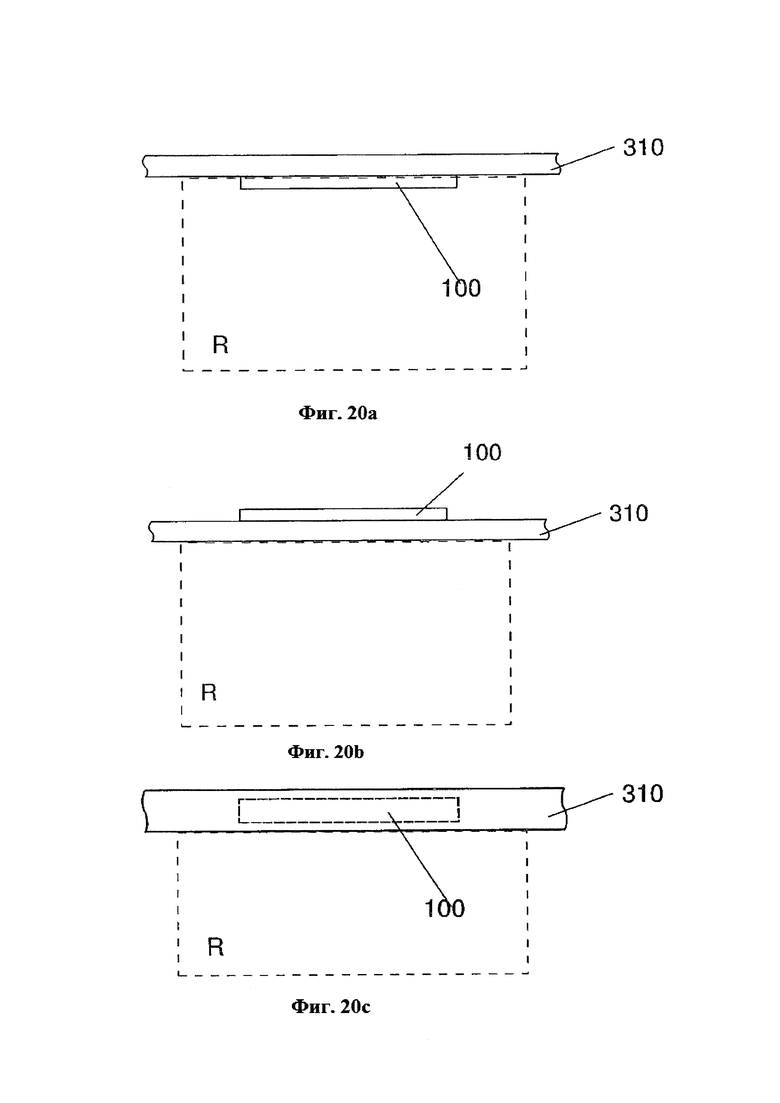
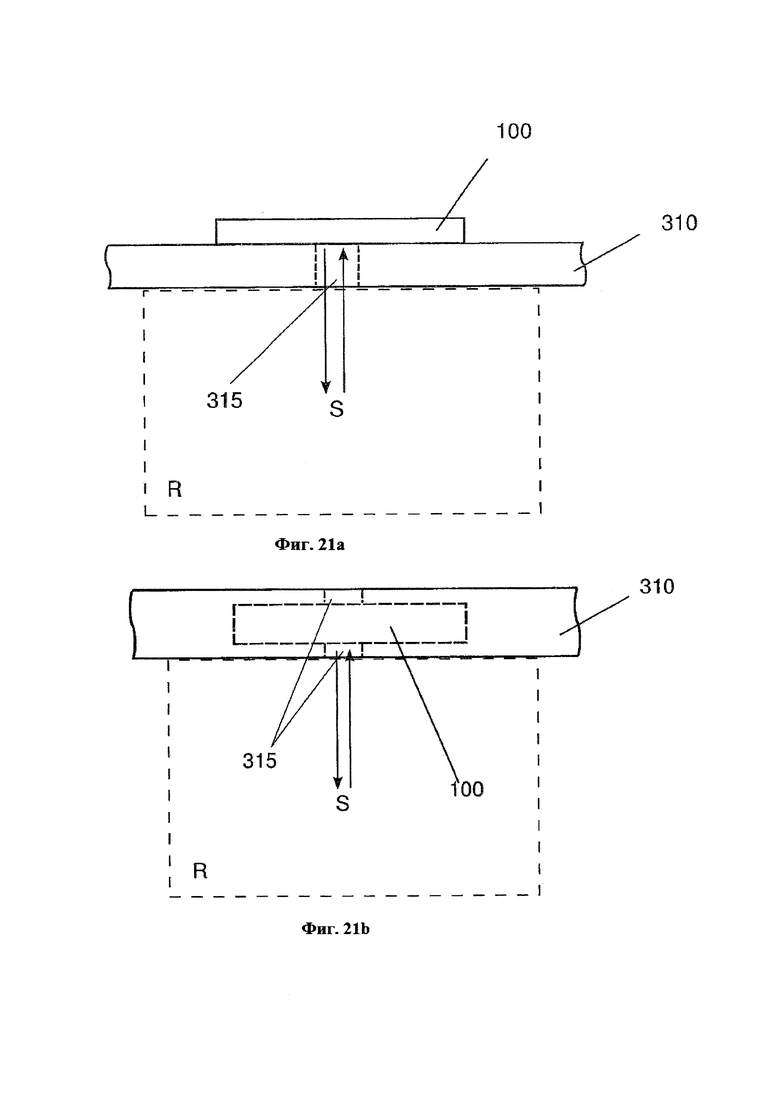
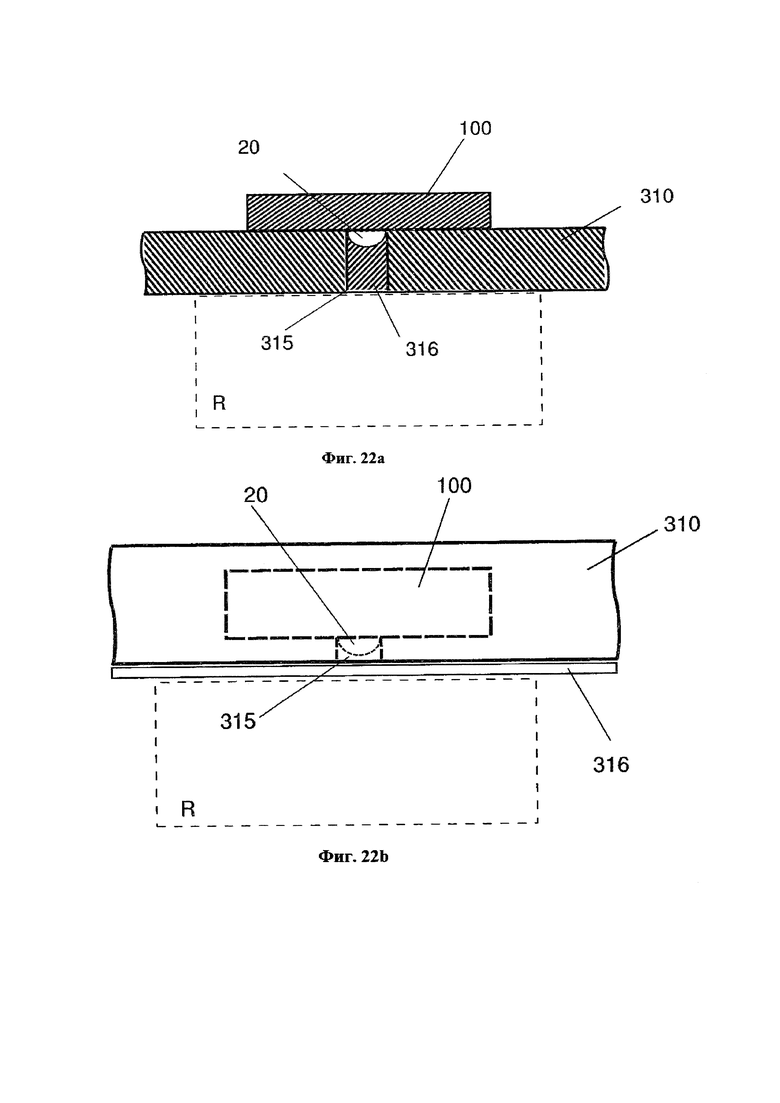
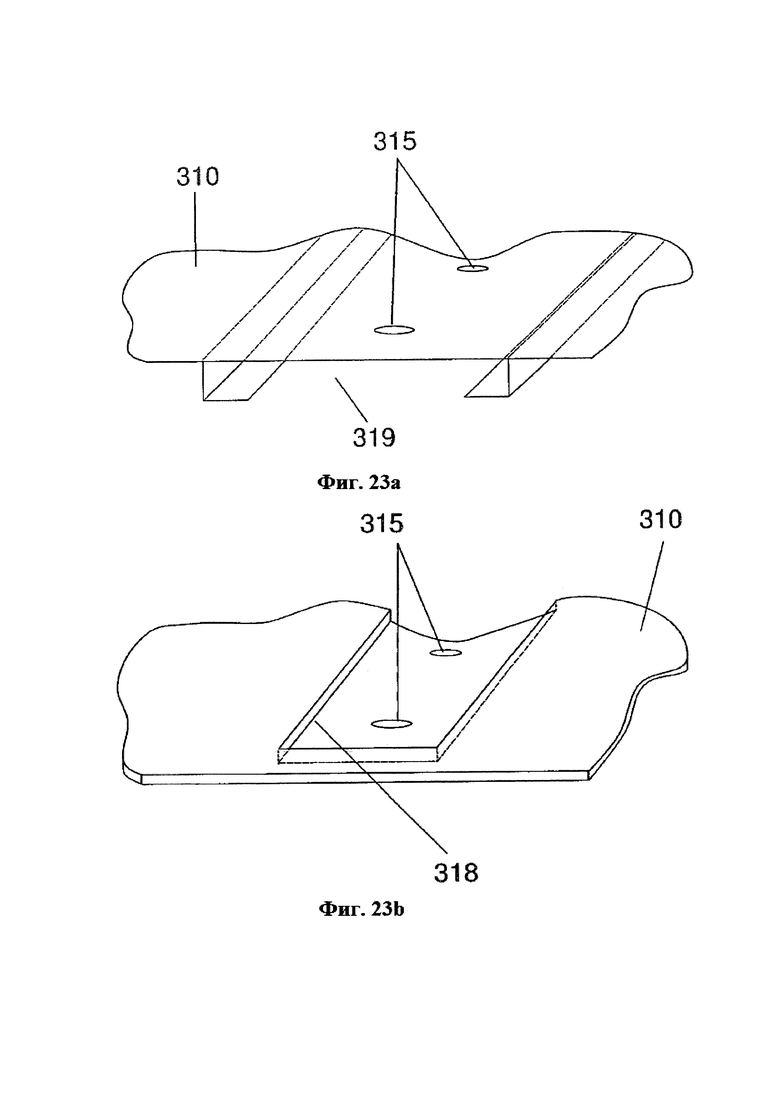
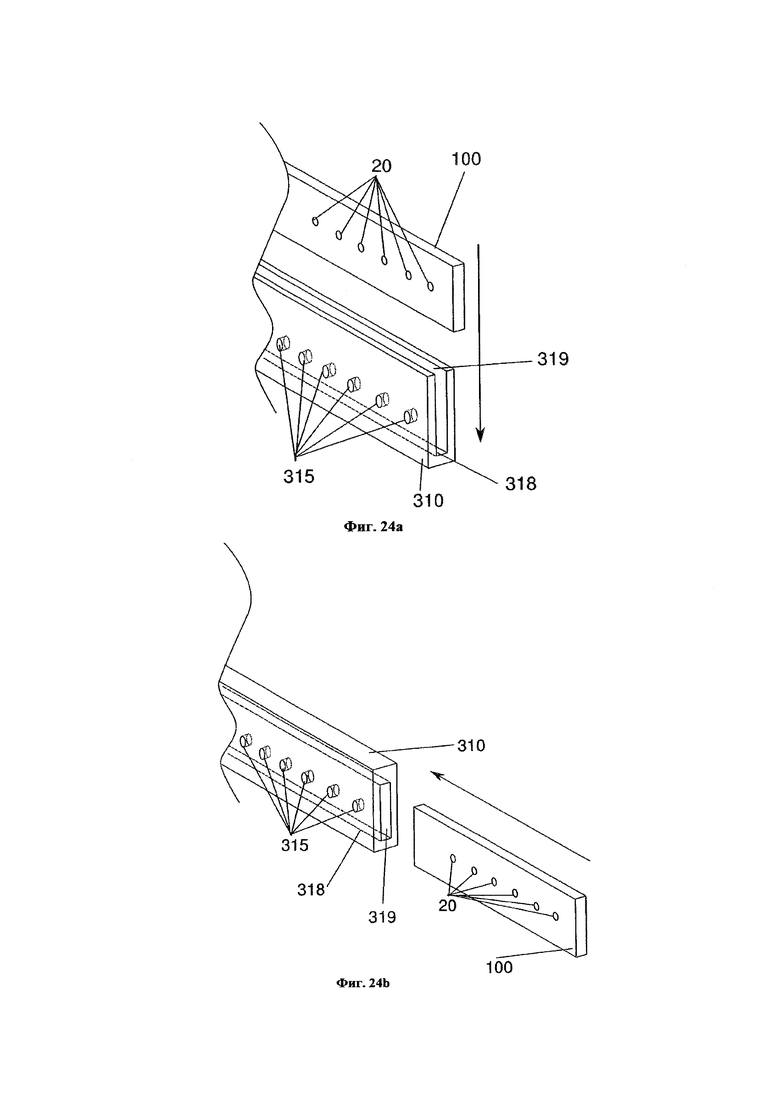
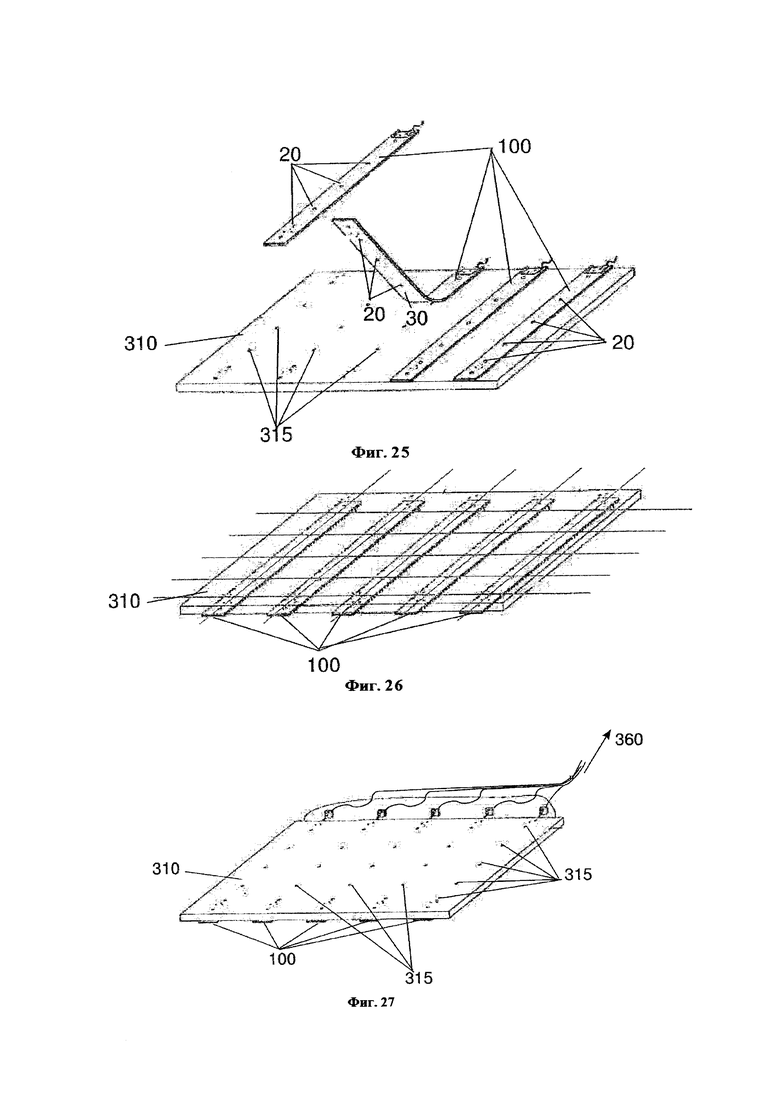
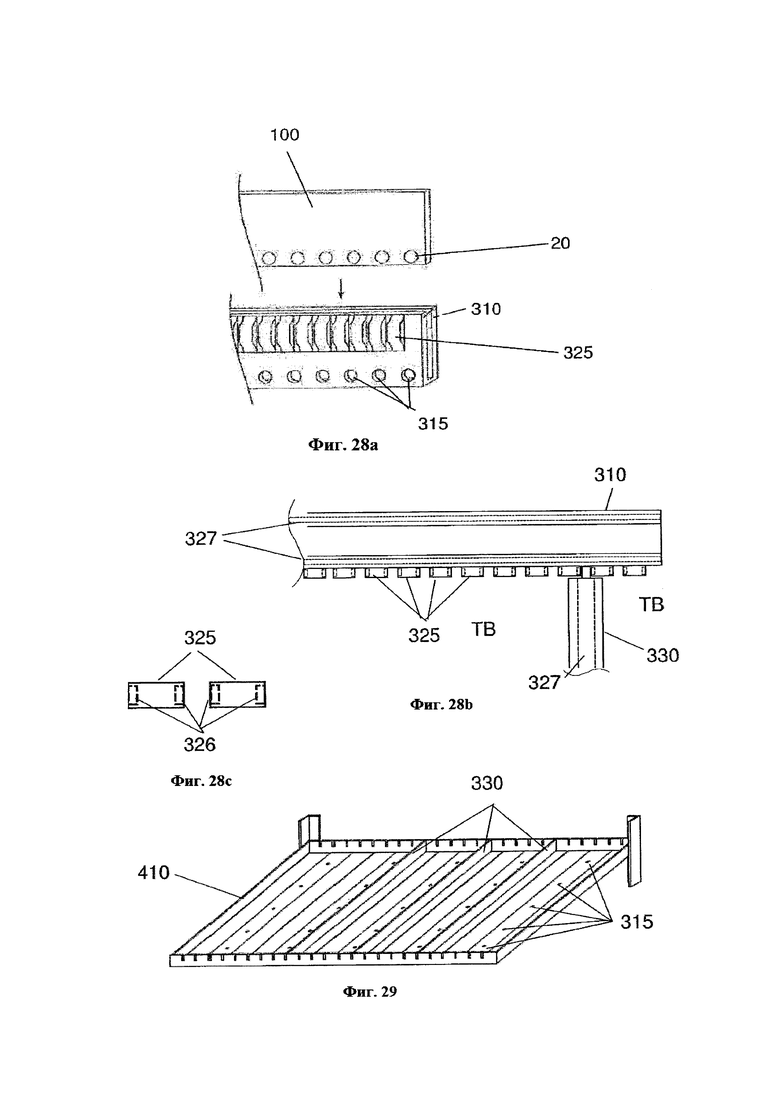
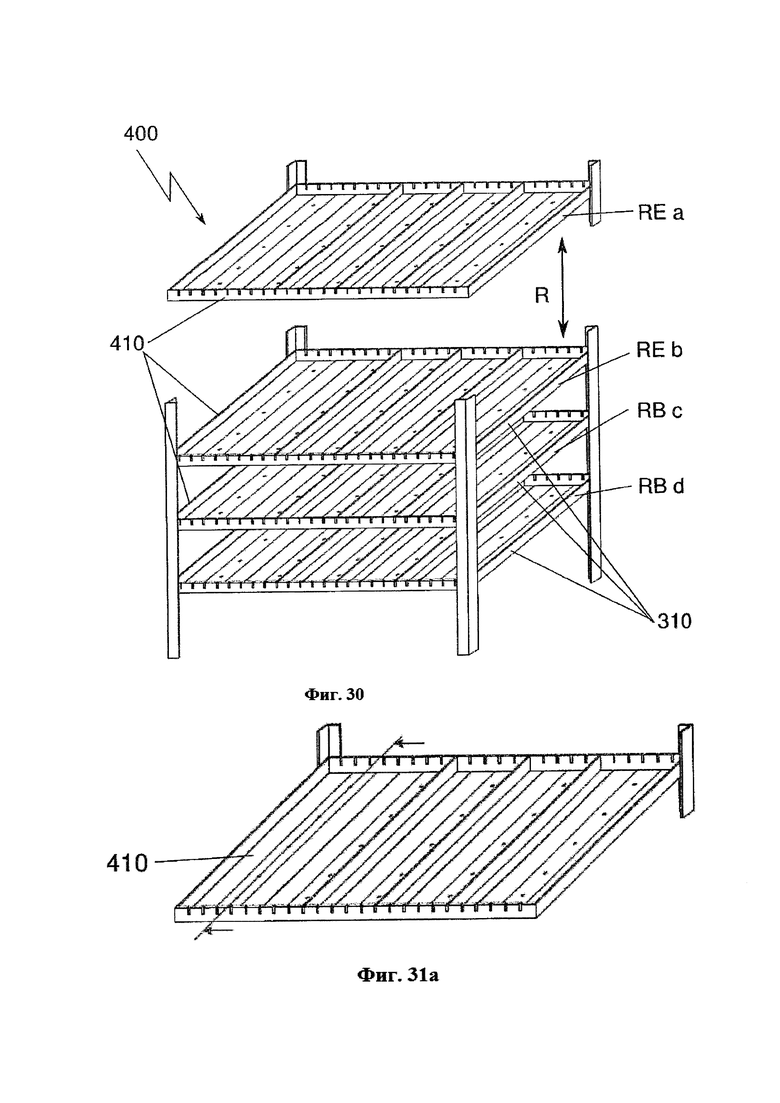
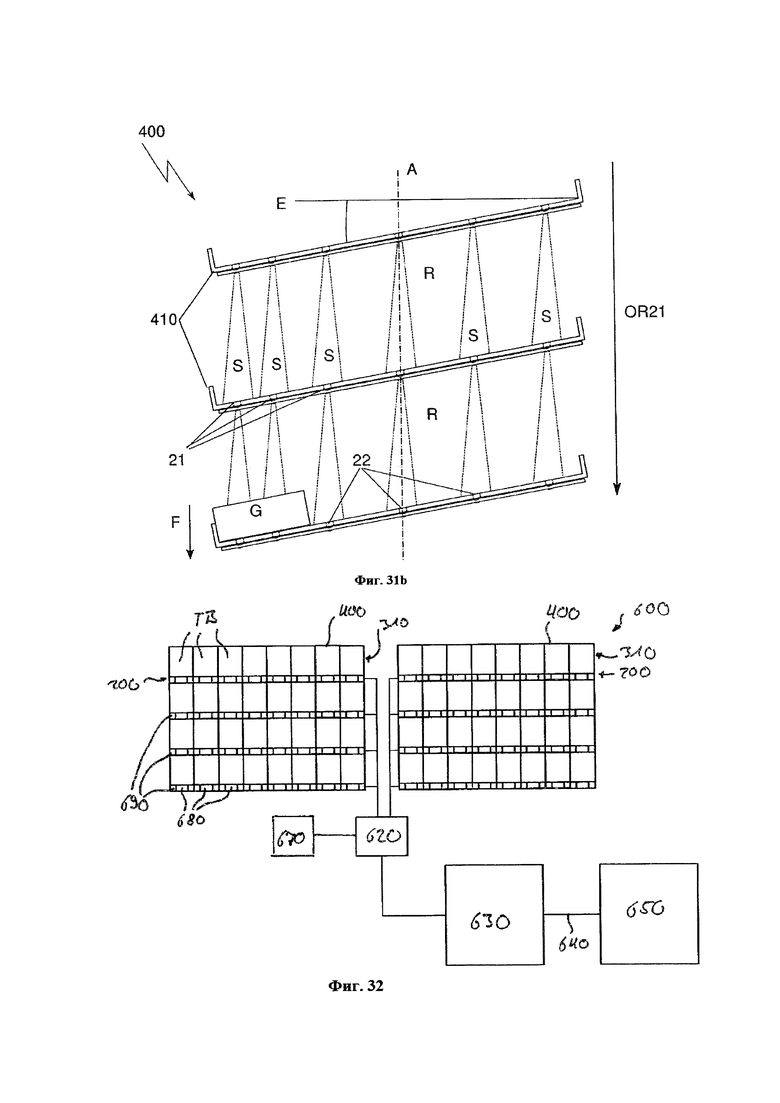

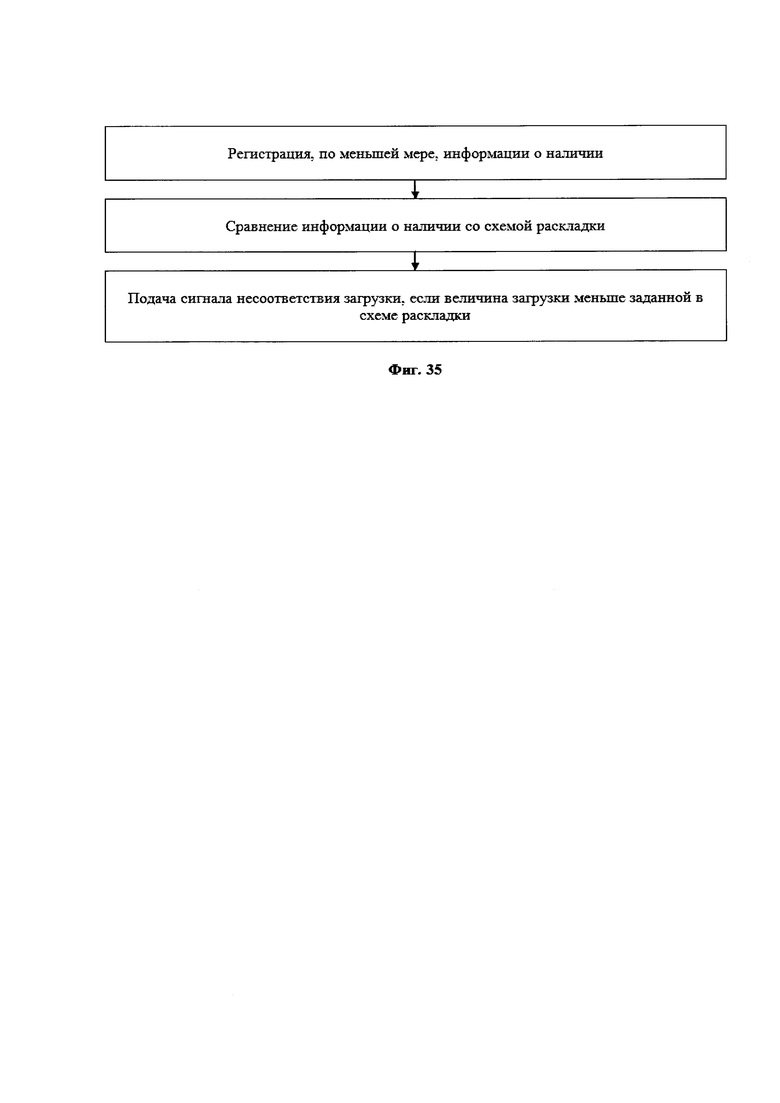
Изобретение относится к области вычислительной техники. Технический результат заключается в упрощенном управлении складской системы. Складская система с по меньшей мере одним стеллажом, стеллаж включает группу расположенных друг над другом полок, при этом каждая полка логически разделена на несколько расположенных рядом отделений (ТВ), при этом каждому из этих отделений (ТВ) присвоен уникальный адрес, с системой датчиков для распознавания состояния загрузки отделений (ТВ), систему датчиков, включающую несколько групп датчиков, и каждая группа закреплена за одним из отделений (ТВ), при этом сама группа (100) датчиков включает определенное количество чувствительных элементов (20), расположенных в продольном направлении относительно группы. 3 н. и 23 з.п. ф-лы, 35 ил.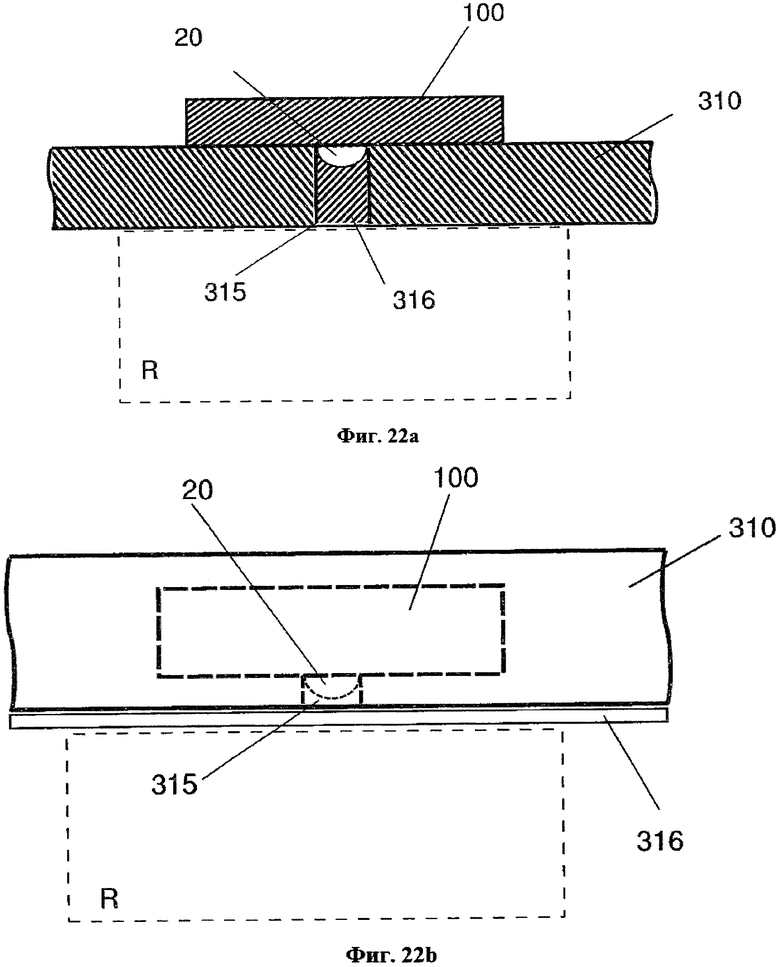
1. Складская система (600) с по меньшей мере одним стеллажом (400), стеллаж (400) включает группу расположенных друг над другом полок (410), при этом каждая полка (410) логически разделена на несколько расположенных рядом отделений (ТВ), при этом каждому из этих отделений (ТВ) присвоен уникальный адрес, с системой (200) датчиков для распознавания состояния загрузки отделений (ТВ), систему (200) датчиков, включающую несколько групп (100) датчиков, и каждая группа (100) закреплена за одним из отделений (ТВ), при этом сама группа (100) датчиков включает определенное количество чувствительных элементов (20), расположенных в продольном направлении относительно группы, при этом система (200) датчиков выполнена для сканирования пространства на предмет загрузки одного из отделений (ТВ) с целью получения информации (710) о наличии в нем объектов, соответствующем уровне заполнения конкретного отделения (ТВ), а также включает шину (620) передачи данных, соединенную с системой (200) датчиков и устройством (630) связи, и управляющей электроникой (16) для каждой группы (100) датчиков, при этом управляющая электроника (16) предназначена для соединения группы (100) датчиков с шиной (620) передачи данных, а также для присвоения адреса отделению (ТВ) и предоставления шине (620) данных информации (710) о наличии в нем объектов, при этом складская система (600) выполнена для реализации таких этапов, как
- получение системой (200) датчиков информации (710) о наличии объектов в отделениях (ТВ);
- передача информации (710) о наличии объектов с указанием адреса, присвоенного анализируемому отделению (ТВ), от системы (200) датчиков к устройству (630) связи через шину (620) данных;
- создание устройством (630) связи сетевого подключения (640) с целью одно- или двунаправленной передачи информации (710) о наличии объектов - серверу (650) или используемой для управления информации - складской системе (600).
2. Складская система по п. 1, в которой стеллаж (400) представляет собой стеллаж с наклонными полками, а наклон полок (410) направлен в сторону отбора объектов со стеллажа.
3. Складская система по пп. 1 и 2, в которой каждая группа (100) датчиков точно и однозначно закреплена за одним отделением (ТВ), а продольное направление группы (100) датчиков соответствует направлению наклона отделений (ТВ).
4. Складская система по одному из предыдущих пп. 1-3, в которой группа (100) датчиков включает гибкую или жесткую печатную плату в форме полосы в качестве основания.
5. Складская система по одному из предыдущих пп. 1-4, в которой группа (100) датчиков закреплена на нижней стороне полки (410) стеллажа, частью которой является закрепленное за соответствующей группой (100) датчиков отделение (ТВ).
6. Складская система по одному из предыдущих пунктов, в которой каждому отделению (ТВ) четко назначено по меньшей мере одно оптическое средство (690) сигнализации, при этом оптическое средство (690) сигнализации соединено с шиной (620) данных, что позволяет получать по шине (620) сигнал для оптического указания на отделение (ТВ) и реализовать систему оптической индикации.
7. Складская система (600) по одному из предыдущих пунктов, конфигурация которой настроена на сохранение времени инвентаризации, и при наступлении установленного времени инвентаризации выполняется автоматическая инвентаризация.
8. Складская система по одному из предыдущих пунктов, в которой в устройстве (630) связи сохранена схема (700) раскладки, по которой производится назначение типов предметов для одного или нескольких адресов или, соответственно, отделений (ТВ), а также пороговое значение для остатка предметов каждого типа,
при этом конфигурация устройства (630) связи настроена так, что на основе информации о наличии, полученной по шине (620) данных, и присвоенных в каждом случае адресов определяется хранящееся в складской системе (600) количество предметов каждого типа, найденное количество предметов каждого типа сравнивается с пороговым значением количества, установленного для данного типа предметов, и если обнаруженное количество предметов данного типа меньше установленного для них порогового значения, отправляется соответствующий сигнал.
9. Складская система по одному из предыдущих пунктов, в которой на устройстве (630) связи установлен программный модуль (720) дистанционного обслуживания, доступ к которому возможен по сети и который позволяет выполнять операции обслуживания непосредственно на складской системе (600), при этом конфигурация программного модуля (720) дистанционного обслуживания настроена таким образом, что по полученной по сети команде имеется возможность определенного воздействия на систему (200) датчиков, в результате чего осуществляется получение информации (710) о наличии предметов в отделении (ТВ), адрес которого был указан в команде, а на основе этой информации (710) генерируется сигнал о наличии, отправляемый по сети.
10. Складская система по одному из предыдущих пунктов, в которой устройство (630) связи выполнено с возможностью динамической записи информации (710) о наличии предметов в складской системе (600), благодаря чему в случае отказа системы имеется возможность восстановления этой информации (710) в любой момент и повторного использования при следующем возврате системы в рабочее состояние.
11. Складская система по одному из предыдущих пунктов, в которой устройство (630) связи предназначено для подключения компьютера (730) с помощью локального соединения с целью последующей визуализации сохраненной в устройстве (630) связи схемы (700) раскладки посредством пользовательского интерфейса на компьютере (730).
12. Складская система по одному из предыдущих пунктов, в которой устройство (630) связи имеет режим наладки, при этом имеется возможность сохранения зарегистрированного в режиме наладки с помощью системы (200) датчиков состояния загрузки складской системы (600) как схемы (700) раскладки, при этом в этой схеме (700) раскладки содержится информация, согласно зарегистрированному системой датчиков состоянию загрузки, в частности, о типе предметов, назначенных для каждого отделения (ТВ), и о пороговом значении, присвоенном системой (200) датчиков для каждого типа предметов.
13. Складская система по п. 12 с ручным сканером (670) для оптической регистрации считываемого оптическим способом кода (680), при этом каждому отделению (ТВ) присваивается оптически считываемый код (680), содержащий информацию о соответствующем адресе отделения, при этом конфигурация устройства (630) связи настроена таким образом, что назначение типа предмета для одного или нескольких отделений (ТВ) происходит путем получения устройством (630) связи адреса, оптически считанного с помощью ручного сканера, и информации о типе предмета, назначенного для оптически считанного адреса.
14. Складская система по п. 13, в которой ручной сканер (670) использует беспроводную систему связи и включает беспроводной интерфейс связи для обмена данными с устройством (630) связи.
15. Складская система по одному из предыдущих пунктов, в которой в каждом отделении (ТВ) система (200) датчиков включает группу (100) датчиков, выполненную в виде гибкой печатной платы, имеющей форму полосы.
16. Складская система по п. 15, в которой каждая из групп (100) датчиков закреплена на нижней стороне полки (410) стеллажа, так что источники (21) сигнала одной из групп (100) датчиков имеют возможность передавать сигнал в направлении верхней стороны полки (410), расположенной, соответственно, этажом ниже, а приемники (22) сигнала одной из групп (100) датчиков имеют возможность принимать сигнал, соответственно, от расположенной этажом выше полки (410) через отверстия в этих полках (410).
17. Складская система по п. 15, в которой источники (21) сигнала и приемники (22) сигнала одной группы (100) датчиков могут быть размещены на печатной плате попарно, в частности, на одной и той же печатной плате, так что отправленный источником сигнал может быть принят приемником той же пары.
18. Складская система по п. 15, в которой источники (21) и приемники (22) сигнала одной группы (100) датчиков расположены попарно на одной и той же печатной плате, в частности, непосредственно рядом друг с другом, при этом размещенные попарно источники (21) и приемники (22) сигнала закреплены за соответствующим отверстием в полке (410) стеллажа, благодаря чему имеется возможность передачи отправляемого одним из источников сигнала через это отверстие и приема приемником сигнала той же пары.
19. Складская система по одному из пп. 15-18, в которой источники сигнала, приемники сигнала и/или токопроводящие дорожки напечатаны на печатной плате для коммутации источников и приемников сигнала с шиной (620) данных.
20. Складская система по одному из предыдущих пунктов, в которой полки (410) стеллажа включают в направлении загрузки отделений (ТВ), в частности в направлении наклона, группу отверстий для приема и/или передачи сигналов системой (200) датчиков, при этом группы (100) датчиков системы (200) датчиков расположены под полками (410) стеллажей и покрыты пленкой, нанесенной в направлении загрузки на верхнюю сторону полки (410) и перекрывающей отверстия.
21. Складская система по п. 20, в которой пленкой является пленка из полимерного материала, в частности пленка из ПВХ, при этом эта полимерная пленка не создает препятствий, в частности, в диапазоне частот приема и/или передачи сигнала.
22. Способ организации складской системы (600) по одному из предыдущих пунктов в соответствии со следующими этапами
- использование складской системы (600) по одному из предыдущих пунктов;
- переключение устройства (630) связи в режим наладки;
- загрузка в отделения (ТВ) складской системы (600) минимального количества предметов, при недостижении которого должен производиться дозаказ этих предметов, согласно предварительно заданной схеме (700) раскладки;
- регистрация минимального количества предметов с помощью системы (200) датчиков и сохранение этой информации в устройстве (630) связи;
- загрузка складской системы (600) предметами до заданной величины остатков.
23. Способ по п. 22, в котором назначение типа предмета для одного из отделений (ТВ) осуществляется с помощью ручного сканера.
24. Способ по п. 22 или 23, в котором ручной сканер включает беспроводной интерфейс связи с устройством (630) связи для передачи сигнала назначения типа предмета для одного из отделений (ТВ) в устройство (630) связи.
25. Способ эксплуатации складской системы (600) по одному из предыдущих пунктов в соответствии со следующими этапами.
- использование складской системы (600) по одному из предыдущих пп. 1-21;
- регистрация информации (710) о наличии предметов по меньшей мере в одном из отделений (ТВ);
- сравнение устройством (630) связи полученной информации (710) о наличии с сохраненной схемой раскладки;
- если устройство (630) связи обнаружило расхождения между полученной информацией (710) о наличии предметов и схемой раскладки, то устройство (630) связи генерирует сигнал несоответствия загрузки и отправляет его по шине (620) данных по адресу той группы (100) датчиков, от которой была получена информация (710) о наличии.
26. Способ по п. 25, в котором оптические средства (690) сигнализации соединены с группой (100) датчиков с помощью шины (620) данных, а электронная система управления группы датчиков, которая принимает от устройства (630) связи сигнал несоответствия загрузки по шине (620) данных, активирует оптическое средство (690) сигнализации соответствующей группы (100) датчиков с целью подачи сигнала несоответствия загрузки.
| Изложница с суживающимся книзу сечением и с вертикально перемещающимся днищем | 1924 |
|
SU2012A1 |
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |
| EP 2178035 A1, 21.04.2010 | |||
| RU 2013139711 A, 10.03.2015. | |||

