Область техники, к которой относится изобретение
[001] Настоящая технология в целом относится к колесным узлам для роботизированных транспортных средств и к оснащенным ими роботизированным транспортным средствам.
Уровень техники
[002] Роботизированные транспортные средства широко используются в целом ряде отраслей для различных целей, в частности, для визуального осмотра и транспортировки различных предметов. Например, в некоторых случаях роботизированные транспортные средства используются для перемещения предметов, хранящихся на складе.
[003] Одни роботизированные транспортные средства программируются на движение по заданным маршрутам или на использование указателей для навигации по складскому пространству. Другие роботизированные транспортные средства оснащаются дополнительными системами для «автономной» адаптации к изменениям планировки складского пространства или к возникающим в реальном времени препятствиям, что повышает их общую эффективность и безопасность при организации складской логистики.
[004] Такие роботизированные транспортные средства зачастую имеют колесные узлы, обеспечивающие их передвижение из одного места в другое. Колесные узлы складских роботизированных транспортных средств обычно содержат мотор-колеса для перемещения роботизированного транспортного средства из точки A в точку Б или по той или иной траектории в складском пространстве. Монтаж и замена таких узлов во многих случаях затруднены из-за их взаимосвязи с другими элементами роботизированного транспортного средства. Эти узлы подвержены износу и в связи с этим нуждаются в периодическом обслуживании для поддержания работоспособности.
[005] В известных технических решениях был предложен ряд способов для решения вышеуказанной технической проблемы.
[006] В патентной заявке CN110001768A «Steering wheel structure and AGV using steering wheel» (Конструкция поворотного колеса и автоматически управляемое транспортное средство с поворотным колесом), опубликованной 12 июля 2019 года и принадлежащей компании Shandong Huali Electromechanical Co Ltd, раскрыта конструкция поворотного колеса, относящаяся к области автоматически управляемых транспортных средств.
[007] В патенте US11634165 «Robotic vehicle, system therewith and use thereof» (Роботизированное транспортное средство, его устройство и применение), выданном 25 апреля 2023 года и принадлежащем компании Eurotec BV, раскрыты роботизированное транспортное средство и его применение для перемещения стеллажа для товаров.
Раскрытие изобретения
[008] Целью настоящей технологии является устранение по меньшей мере части недостатков известных технических решений.
[009] В соответствии с широким аспектом настоящей технологии реализован колесный узел для роботизированного транспортного средства. Колесный узел включает в себя опорную платформу, контроллер, поворотный узел, направляющий элемент, мотор-колесо и кабель. Опорная платформа может соединяться с рамой роботизированного транспортного средства. Контроллер соединен с опорной платформой. Поворотный узел соединен с опорной платформой. Направляющий элемент функционально связан с поворотным узлом так, чтобы обеспечивался его поворот вокруг оси поворота, и образует канал. Мотор-колесо функционально связано с поворотным узлом так, чтобы обеспечивался его поворот вокруг оси поворота. Кабель, предназначенный для передачи сигналов от контроллера к мотор-колесу, включает в себя первую и вторую секции. Первая секция проходит через канал и функционально связана с мотор-колесом. Первая секция неподвижна относительно направляющего элемента. Вторая секция функционально связана с контроллером и в нейтральном положении по меньшей мере частично намотана на направляющий элемент для обеспечения запаса длины кабеля при повороте мотор-колеса. При повороте мотор-колеса под действием поворотного узла вокруг оси поворота в первом направлении вторая секция кабеля дополнительно наматывается на направляющий элемент в свернутое положение, в котором запас длины служит для обеспечения возможности поворота мотор-колеса. При повороте мотор-колеса под действием поворотного узла вокруг оси поворота во втором направлении вторая секция кабеля по меньшей мере частично сматывается с направляющего элемента в развернутое положение, в котором запас длины увеличен в сравнении с нейтральным положением.
[010] В некоторых вариантах осуществления первая секция кабеля, размещенная в канале, прижата к направляющему элементу прижимным элементом.
[011] В некоторых вариантах осуществления прижимной элемент представляет собой полимерный сферический элемент.
[012] В некоторых вариантах осуществления прижимной элемент способен прижимать кабель к направляющему элементу на входе канала.
[013] В некоторых вариантах осуществления колесный узел дополнительно содержит упорный сегмент, расположенный рядом с входом канала и способный упираться в кабель при повороте направляющего элемента под действием поворотного узла.
[014] В некоторых вариантах осуществления поворотный узел содержит электродвигатель поворота, соединенный с опорной платформой.
[015] В некоторых вариантах осуществления поворотный узел содержит поворотное колесо, соединенное с опорной платформой с возможностью его вращения и способное поворачиваться вокруг оси поворота.
[016] В некоторых вариантах осуществления электродвигатель соединен с поворотным колесом трансмиссией.
[017] В некоторых вариантах осуществления поворотный узел расположен над верхней поверхностью опорной платформы, а мотор-колесо расположено под нижней поверхностью опорной платформы, при этом направляющий элемент проходит сквозь платформу таким образом, что канал образует путь для первой секции кабеля сквозь платформу.
[018] В некоторых вариантах осуществления канал расположен параллельно оси поворота.
[019] В некоторых вариантах осуществления колесный узел дополнительно содержит отсек для хранения, образующий камеру для хранения второй секции кабеля.
[020] В некоторых вариантах осуществления колесный узел дополнительно содержит катушку, функционально связанную с поворотным узлом и обеспечивающую хранение второй секции кабеля.
[021] В некоторых вариантах осуществления колесный узел представляет собой модульный колесный узел, выборочно соединенный с рамой роботизированного транспортного средства.
[022] В некоторых вариантах осуществления сигналы включают в себя управляющие сигналы для управления движением мотор-колеса и/или сигналы питания для питания мотор-колеса.
[023] В соответствии с другим аспектом настоящей технологии реализовано роботизированное транспортное средство, включающее в себя раму и по меньшей мере один колесный узел согласно вышеуказанному аспекту или согласно вышеуказанному аспекту и одному или нескольким вышеуказанным вариантам осуществления. По меньшей мере один колесный узел может соединяться с рамой.
[024] В некоторых вариантах осуществления по меньшей мере один колесный узел выборочно соединен с рамой.
[025] В некоторых вариантах осуществления по меньшей мере один колесный узел может выборочно соединяться с рамой в первой и второй конфигурациях.
[026] В некоторых вариантах осуществления по меньшей мере один колесный узел, выборочно соединенный с рамой в первой конфигурации, представляет собой левый передний колесный узел и/или левый задний колесный узел роботизированного транспортного средства.
[027] В некоторых вариантах осуществления по меньшей мере один колесный узел, выборочно соединенный с рамой во второй конфигурации, представляет собой правый передний колесный узел и/или правый задний колесный узел роботизированного транспортного средства.
[028] В контексте настоящего описания термин «электронное устройство» используется для обозначения любых компьютерных аппаратных средств, способных обеспечивать работу программного обеспечения, подходящего для решения поставленной задачи. В контексте настоящего описания термин «электронное устройство» подразумевает, что устройство может функционировать в качестве сервера для других электронных и клиентских устройств, впрочем, это не носит обязательного характера для настоящей технологии. Таким образом, примерами (не имеющими ограничительного характера) электронных устройств являются персональные компьютеры (настольные компьютеры, ноутбуки, нетбуки и т.п.), смартфоны и планшеты, а также сетевое оборудование, например, маршрутизаторы, коммутаторы и шлюзы. Следует понимать, что в данном контексте факт функционирования оборудования в качестве электронного устройства не означает невозможности его функционирования в качестве сервера для других электронных устройств. Употребление выражения «электронное устройство» не исключает использования нескольких клиентских устройств для приема/передачи, выполнения или инициирования выполнения каких-либо задач или запросов, результатов каких-либо задач или запросов либо шагов какого-либо метода, описанного в настоящем документе.
[029] Здесь термины, относящиеся к пространственной ориентации, такие как вперед, назад, вверх, вниз, влево и вправо, соответствуют их общепринятому пониманию пользователем или оператором роботизированного транспортного средства. Термины, относящиеся к пространственной ориентации, при описании или указании элементов или подсистем устройства отдельно от устройства следует понимать так, как если бы эти элементы или подсистемы были установлены в устройстве.
[030] Каждый вариант осуществления настоящей технологии относится к по меньшей мере одному из вышеупомянутых аспектов, но не обязательно ко всем ним. Следует понимать, что некоторые аспекты настоящей технологии, связанные с попыткой достижения вышеупомянутой цели, могут не соответствовать этой цели и/или могут соответствовать другим целям, не упомянутым здесь явным образом.
[031] Дополнительные и/или альтернативные признаки, аспекты и преимущества вариантов осуществления настоящей технологии содержатся в дальнейшем описании, на приложенных чертежах и в формуле изобретения.
Краткое описание чертежей
[032] Для более полного понимания настоящей технологии, а также ее аспектов и дополнительных признаков, следует обратиться к следующему описанию в сочетании с сопроводительными чертежами.
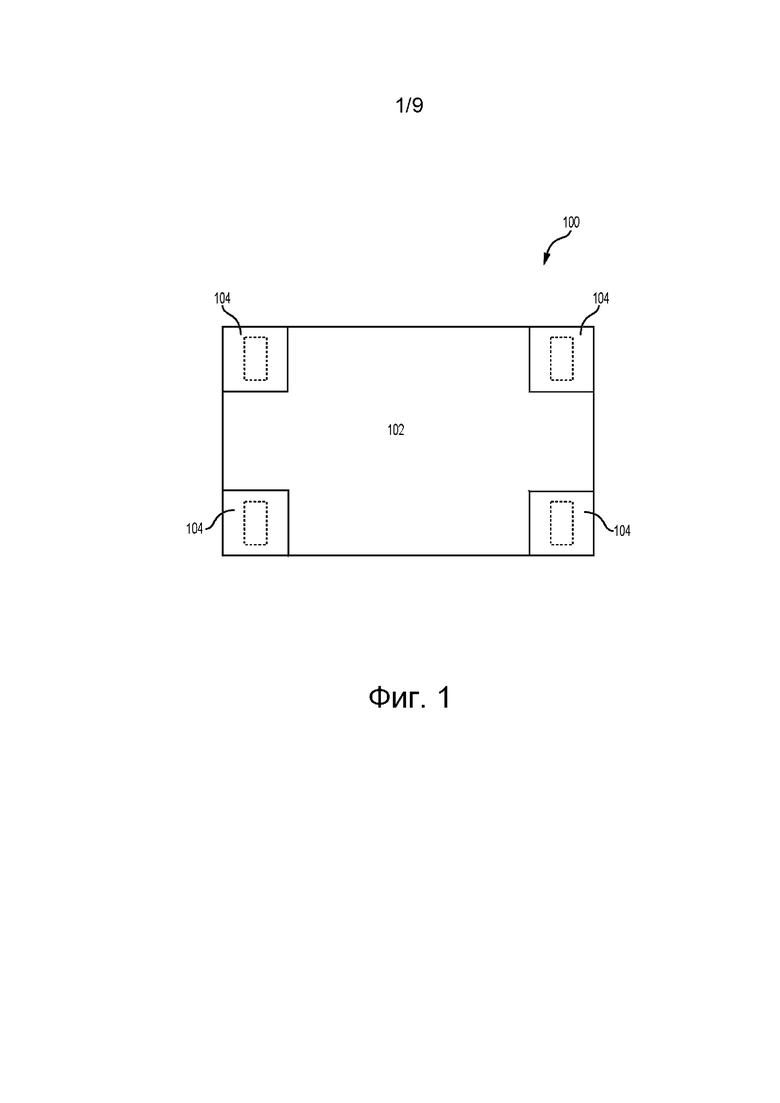
[033] На фиг. 1 схематически представлен вид сверху роботизированного транспортного средства в соответствии с некоторыми не имеющими ограничительного характера вариантами осуществления настоящей технологии.
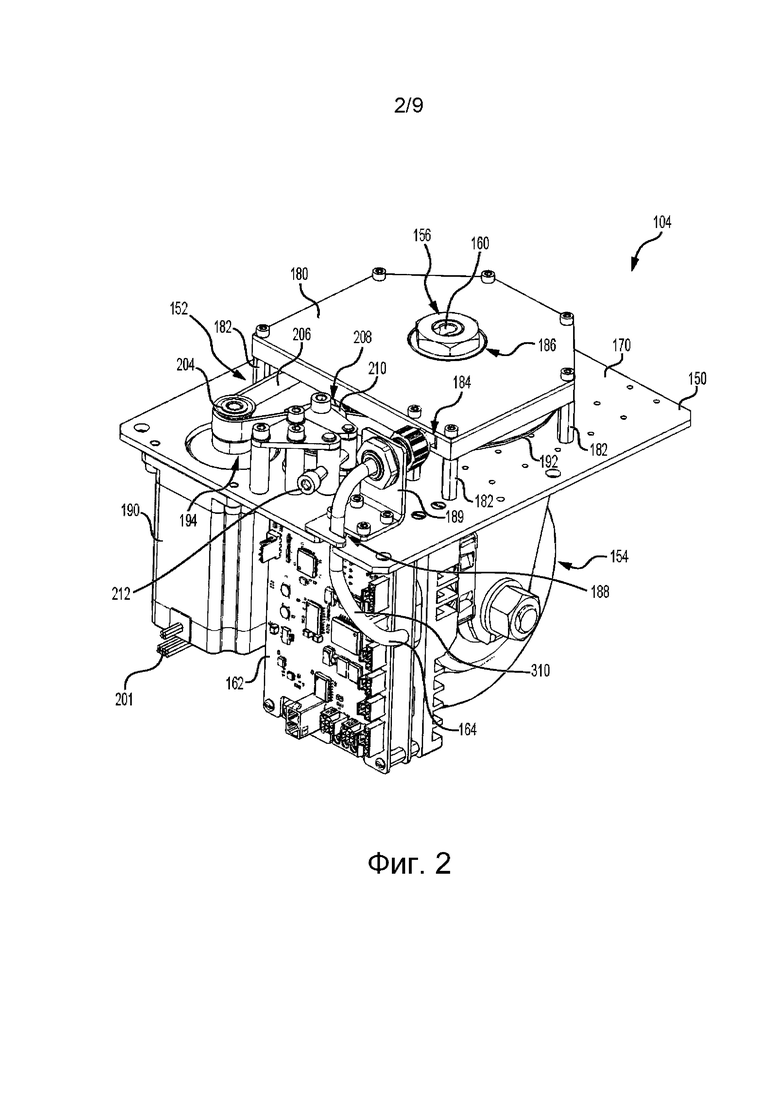
[034] На фиг. 2 представлен аксонометрический вид сверху справа сзади колесного узла роботизированного транспортного средства, изображенного на фиг. 1, в соответствии с некоторыми не имеющими ограничительного характера вариантами осуществления настоящей технологии.
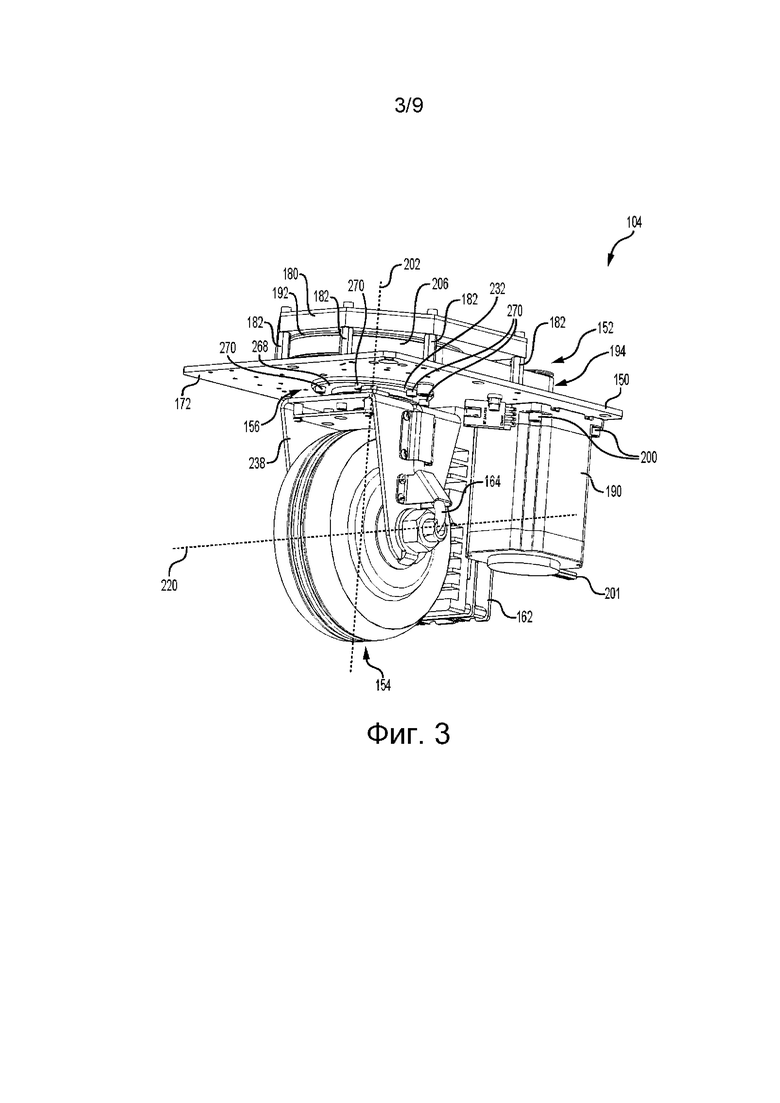
[035] На фиг. 3 представлен аксонометрический вид снизу слева спереди колесного узла, изображенного на фиг. 2, в соответствии с некоторыми не имеющими ограничительного характера вариантами осуществления настоящей технологии.
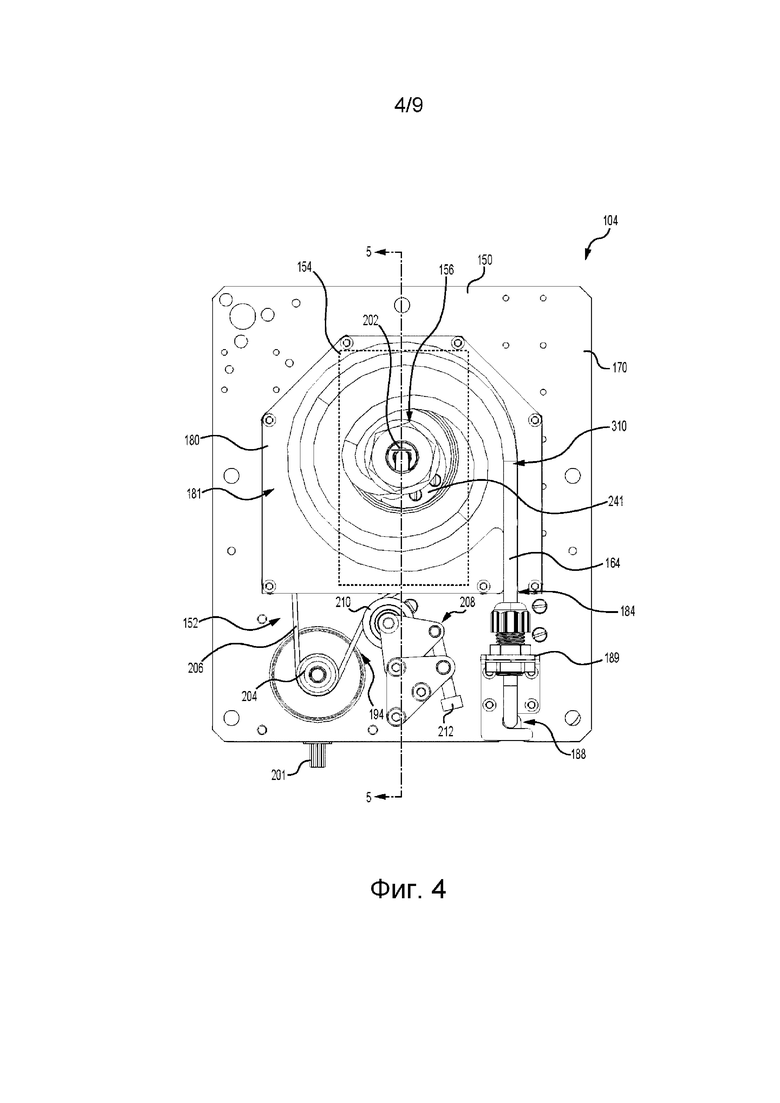
[036] На фиг. 4 представлен вид сверху колесного узла, изображенного на фиг. 2, на котором верхняя сторона отсека для хранения условно показана прозрачной, в соответствии с некоторыми не имеющими ограничительного характера вариантами осуществления настоящей технологии.
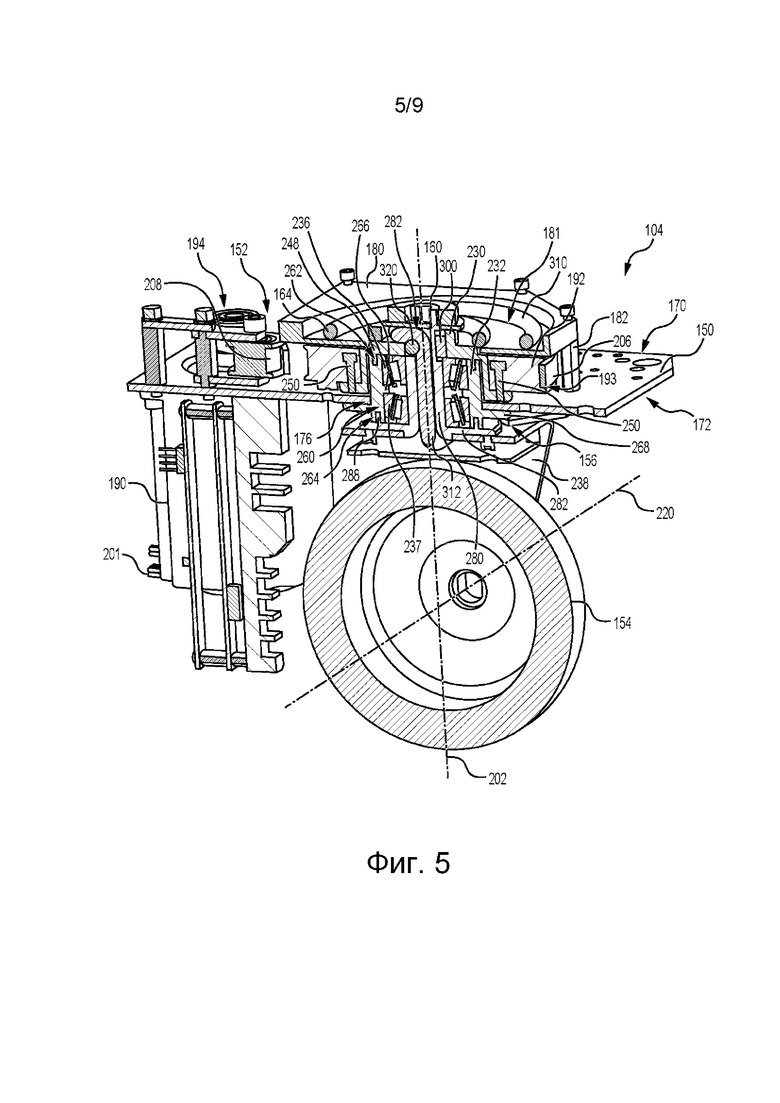
[037] На фиг. 5 представлен вид в разрезе по линии 5-5, показанной на фиг. 4, колесного узла, изображенного на фиг. 2, в соответствии с некоторыми не имеющими ограничительного характера вариантами осуществления настоящей технологии.
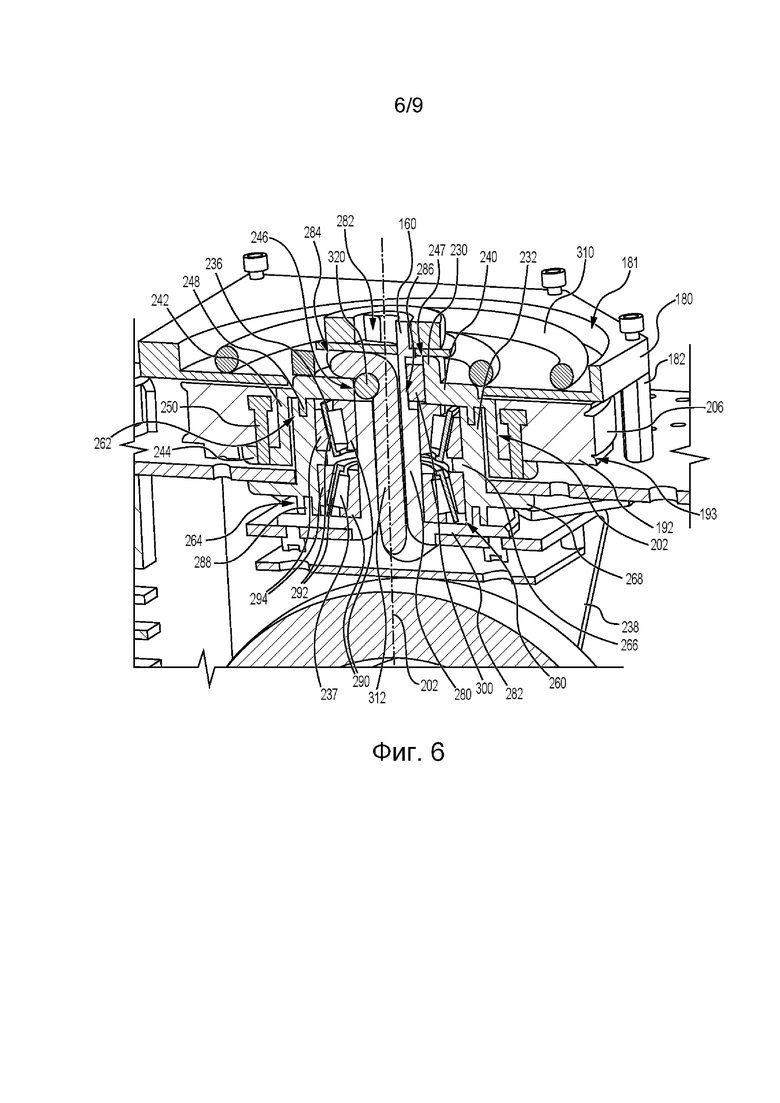
[038] На фиг. 6 представлен вид в увеличенном масштабе соединительного узла, входящего в состав колесного узла, изображенного на фиг. 5, в соответствии с некоторыми не имеющими ограничительного характера вариантами осуществления настоящей технологии.
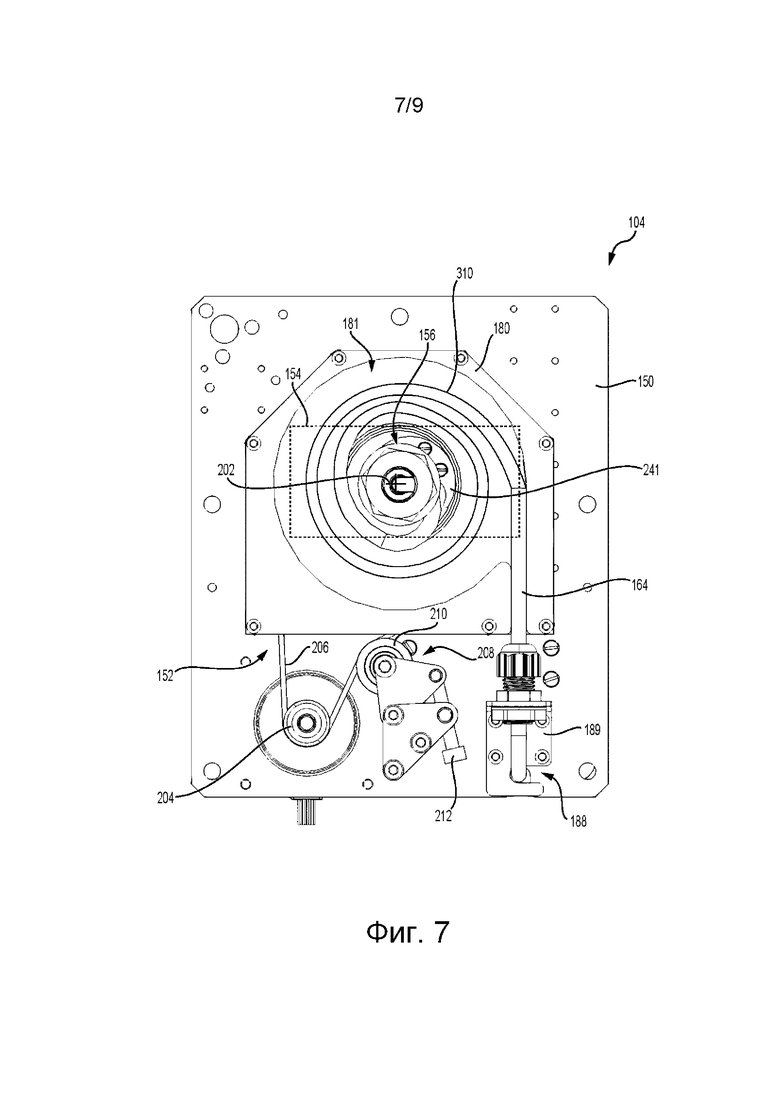
[039] На фиг. 7 представлен вид сверху колесного узла, изображенного на фиг. 2, на котором верхняя сторона отсека для хранения условно показана прозрачной, а мотор-колесо повернуто в первом направлении, в соответствии с некоторыми не имеющими ограничительного характера вариантами осуществления настоящей технологии.
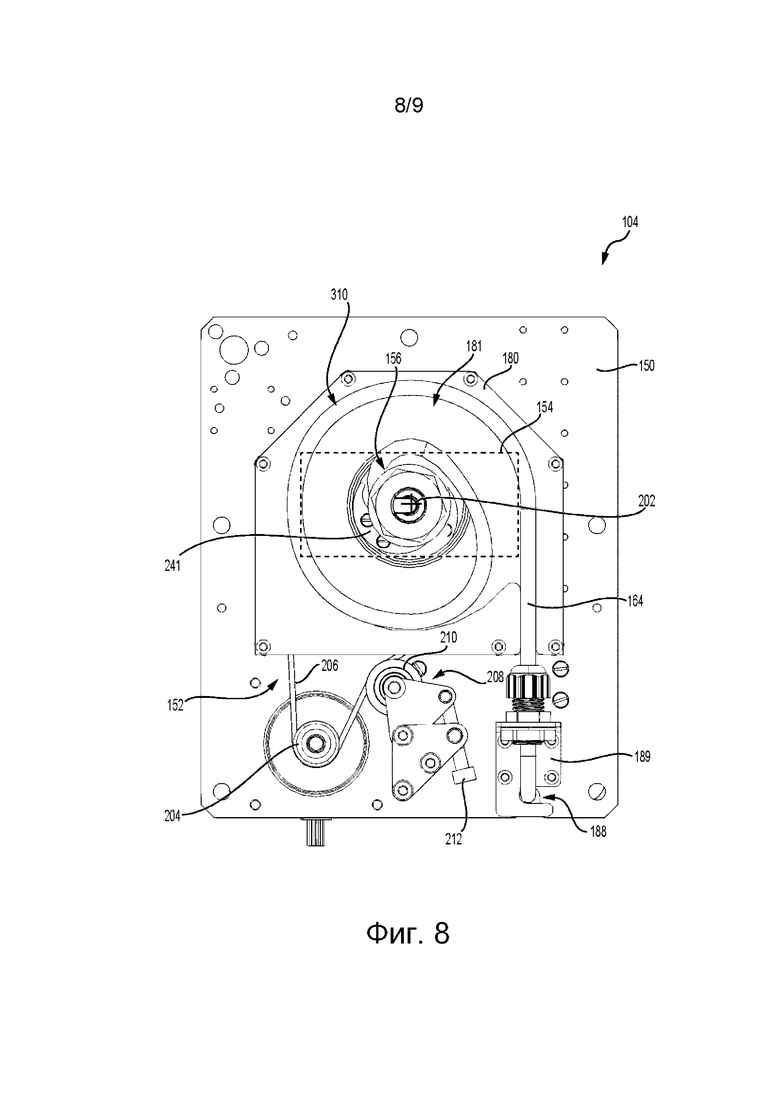
[040] На фиг. 8 представлен вид сверху колесного узла, изображенного на фиг. 2, на котором верхняя сторона отсека для хранения условно показана прозрачной, а мотор-колесо повернуто во втором направлении, в соответствии с некоторыми не имеющими ограничительного характера вариантами осуществления настоящей технологии.
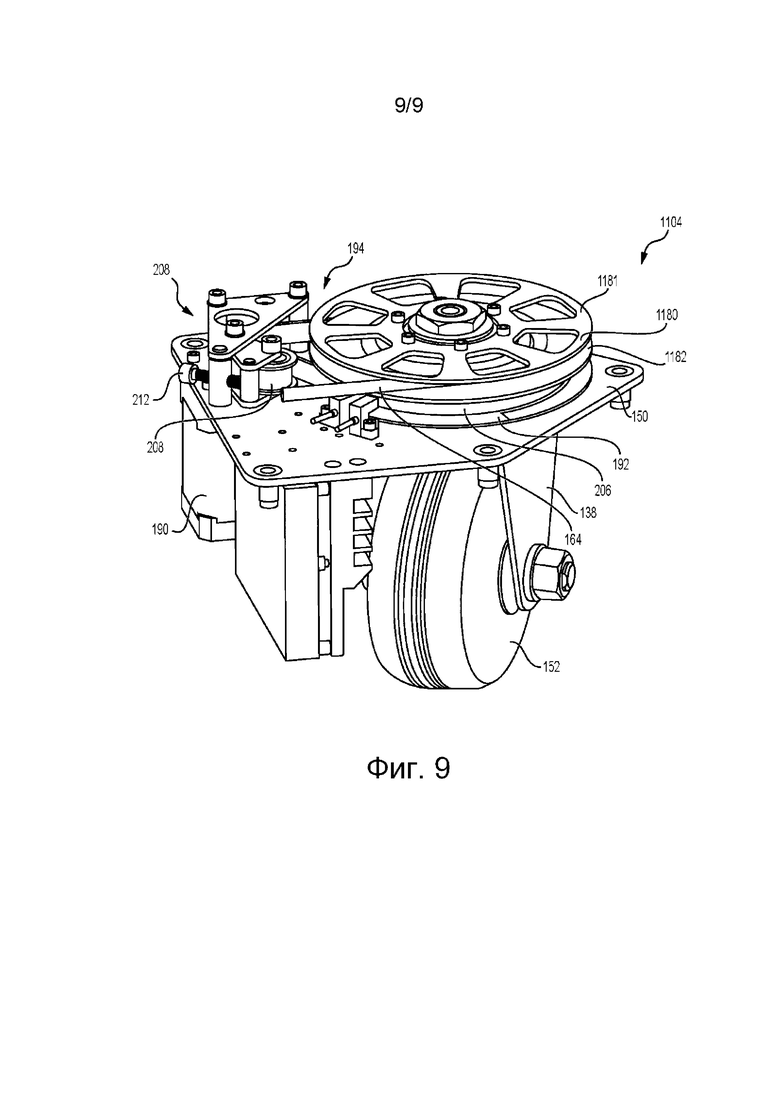
[041] На фиг. 9 представлен аксонометрический вид сверху справа сзади колесного узла роботизированного транспортного средства, изображенного на фиг. 1, в соответствии с альтернативными не имеющими ограничительного характера вариантами осуществления настоящей технологии.
Осуществление изобретения
[042] На фиг. 1 изображено роботизированное транспортное средство 100. В соответствии с некоторыми не имеющими ограничительного характера вариантами осуществления настоящей технологии, роботизированное транспортное средство 100 представляет собой робот-инвентаризатор 100, который может использоваться для перемещения различных предметов, хранящихся на складе, из одного места в другое, в частности, из места хранения в место обработки или отгрузки на складе. Такие предметы могут включать в себя, среди прочего, пищевые продукты, промышленные товары, сырье, используемое для производства различных продуктов и изделий и т.п. В общем случае на складе могут быть установлены складские стеллажи с несколькими уровнями полок для хранения таких предметов. Предметы могут храниться на полках складских стеллажей как по отдельности, так и в контейнерах соответствующих размеров, например, на поддонах.
[043] Робот-инвентаризатор 100 способен передвигаться вдоль складских стеллажей (которые, как правило, образуют проходы на складе) и перемещать предметы, хранящиеся на полках складских стеллажей, в другие места на складе. В некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии робот-инвентаризатор 100 может содержать сканирующие датчики для сканирования предметов на полках в целях наблюдения и/или выбора предметов, подлежащих перемещению. В одном из примеров робот-инвентаризатор 100 сканирует предметы, хранящиеся на полках, и определяет конкретный предмет, который необходимо переместить. Затем робот-инвентаризатор 100 забирает этот предмет с полки и перемещает его в нужное место.
[044] Предполагаются и другие виды роботизированных транспортных средств, такие как роботы-доставщики и т.п.
[045] Как показано на фиг. 1, робот-инвентаризатор 100 содержит раму 102 и четыре колесных узла 104. Предполагается, что в других вариантах осуществления количество колесных узлов может быть как большим, так и меньшим четырех.
[046] Рама 102 в общем случае имеет крестообразную форму и обеспечивает присоединение на каждом ее углу одного из колесных узлов 104. Таким образом, когда все четыре колесных узла 104 соединены с рамой 102, робот-инвентаризатор 100 имеет по существу прямоугольную форму. Предполагается, что без отступления от существа и объема настоящей технологии форма рамы 102 может варьироваться. Например, предполагается, что в тех вариантах осуществления, в которых используется другое количество колесных узлов 104, рама 102 может иметь другую форму.
[047] Четыре колесных узла 104 включают в себя левый передний колесный узел, правый передний колесный узел, левый задний колесный узел и правый задний колесный узел (отдельно не обозначены). Каждый колесный узел 104 выборочно соединен с рамой 102. Предполагается, что в некоторых вариантах осуществления один или несколько колесных узлов 104 могут быть постоянно соединены с рамой 102. В некоторых вариантах осуществления колесные узлы 104 могут соединяться с рамой в двух или более положениях, вследствие чего левый передний колесный узел, правый передний колесный узел, левый задний колесный узел и правый задний колесный узел могут быть взаимозаменяемыми (например, взаимозаменяемыми могут быть левый передний колесный узел и правый задний колесный узел).
[048] Ниже со ссылкой на фиг. 2-5 более подробно описаны колесные узлы 104. Каждый колесный узел 104 включает в себя опорную платформу 150, поворотный узел 152, мотор-колесо 154, соединительный узел 156 с направляющим элементом 160, контроллер 162 и кабель 164. Предполагается, что некоторые из колесных узлов 104 могут содержать как большее, так и меньшее количество элементов. Например, один из колесных узлов 104 может представлять собой простой колесный узел с самоориентирующимся колесом.
[049] Опорная платформа 150 имеет верхнюю поверхность 170 и нижнюю поверхность 172. Опорная платформа 150 имеет по существу прямоугольную форму и выборочно соединена с рамой 102. В некоторых вариантах осуществления опорная платформа 150 может быть соединена с рамой 102 с помощью крепежных элементов (таких как болты или т.п.). В других вариантах осуществления опорная платформа 150 может быть соединена с рамой 102 с помощью фиксирующих элементов. Предполагается, что в других вариантах осуществления опорная платформа 150 может иметь особую форму, при необходимости обеспечивающую взаимозаменяемость того или иного колесного узла 104 с другим колесным узлом 104. Опорная платформа 150 содержит отверстие 176 для размещения в нем по меньшей мере части соединительного узла 156.
[050] Отсек 180 для хранения размещен на верхней стороне опорной платформы 150 с использованием стоек 182, благодаря чему дно отсека 180 для хранения располагается на некотором расстоянии от верхней поверхности 170 опорной платформы 150. В показанном варианте осуществления предусмотрено семь стоек 182. Предполагается, что количество стоек 182 варьируется в зависимости от варианта осуществления. Отсек 180 для хранения неподвижен относительно опорной платформы 150. Отсек 180 для хранения содержит боковое отверстие 184, через которое проходит кабель 164. Отсек 180 для хранения содержит центральное отверстие 186. Центральное отверстие 186 представляет собой вертикально расположенное сквозное отверстие. Центральное отверстие 186 обеспечивает размещение части соединительного узла 156. Отсек 180 для хранения образует камеру 181 для хранения. Как более подробно описано ниже, камера 181 для хранения обеспечивает размещение и хранение сегмента кабеля 164.
[051] Поворотный узел 152, большая часть которого размещена на верхней стороне опорной платформы 150, включает в себя электродвигатель 190 поворота, поворотное колесо 192 и трансмиссию 194, функционально связывающую электродвигатель 190 поворота с поворотным колесом 192.
[052] Электродвигатель 190 поворота соединен с опорной платформой 150 с помощью крепежных элементов 200. Предполагается, что электродвигатель 190 поворота может быть соединен с опорной платформой 150 иным способом, например, с использованием сварки. В показанном варианте осуществления часть электродвигателя 190 поворота расположена под нижней поверхностью 172 опорной платформы 150. Предполагается, что электродвигатель 190 поворота может быть размещен иным способом. Например, в некоторых вариантах осуществления весь электродвигатель 190 поворота может располагаться над верхней поверхностью 170 опорной платформы 150. Электродвигатель 190 поворота связан с контроллером роботизированного транспортного средства (не показан) посредством кабелей 201 (фиг. 2 и 4), благодаря чему контроллер роботизированного транспортного средства способен управлять электродвигателем 190 поворота. В некоторых вариантах осуществления электродвигатель 190 поворота может быть связан с контроллером 162.
[053] Поворотное колесо 192, расположенное под опорной платформой 150, посредством соединительного узла 156 соединено с опорной платформой 150 с обеспечением возможности его поворота. Поворотное соединение между поворотным колесом 192 и опорной платформой 150 более подробно описано ниже. Поворотное колесо 192 способно поворачиваться вокруг оси 202 поворота. Ось 202 поворота расположена по существу вертикально. Поворотное колесо 192 имеет центральное отверстие 203 для размещения в нем части соединительного узла 156. По окружности поворотного колеса 192 проходит ручей 193 для ремня, предназначенный для размещения ремня 206.
[054] Трансмиссия 194 включает в себя звездочку 204, ремень 206 и натяжной узел 208.
[055] Звездочка 204 функционально связана с электродвигателем 190 поворота и благодаря этому вращается под действием электродвигателя 190 поворота. Предполагается, что в некоторых вариантах осуществления звездочка 204 может быть частью электродвигателя 190 поворота. На звездочке 204 предусмотрены пазы для улучшения сцепления между ней и ремнем 206. В некоторых вариантах осуществления пазы могут отсутствовать. В некоторых вариантах осуществления ремень 206 может иметь зубцы, способные входить в зацепление с пазами на звездочке 204.
[056] Ремень 206 наматывается на звездочку 204 и поворотное колесо 192. Ремень 206 находится в ручье 193 для ремня на поворотном колесе 192. Ремень 206 взаимодействует со звездочкой 204 и поворотным колесом 192 для передачи приводного усилия. Таким образом, вращение звездочки 204 вызывает поворот поворотного колеса 192. Диаметр поворотного колеса 192 превышает диаметр звездочки 204. При этом один полный оборот звездочки 204 соответствует неполному обороту поворотного колеса 192.
[057] Натяжной узел 208 соединен с опорной платформой 150. Натяжной узел 208 содержит натяжной ролик 210, взаимодействующий с ремнем 206, и натяжитель 212, функционально связанный с натяжным роликом 210. Натяжитель 212 обеспечивает регулировку положения натяжного ролика 210 и, как следствие, натяжения ремня 206.
[058] Предполагается, что трансмиссия 194 может варьироваться в зависимости от варианта осуществления. Например, в некоторых вариантах осуществления трансмиссия 194 может содержать шестерни, а по окружности поворотного колеса 192 могут располагаться зубья, а не ручей 193 для ремня.
[059] Мотор-колесо 154, расположенное под опорной платформой 150, функционально связано с поворотным узлом 152. В частности, мотор-колесо 154 функционально связано с поворотным колесом 192 посредством соединительного узла 156. Таким образом, поворот поворотного колеса 192 вокруг оси 202 поворота вызывает поворот мотор-колеса 154 вокруг оси 202 поворота. Как более подробно описано ниже, мотор-колесо 154 также связано с контроллером 162 посредством кабеля 164. Кабель 164 подключен к мотор-колесу 154 сбоку. Мотор-колесо 154 содержит электродвигатель (не показан), обеспечивающий вращение мотор-колеса 154 вокруг оси 220.
[060] Ниже со ссылкой на фиг. 5 и 6 более подробно описан соединительный узел 156. Соединительный узел 156 проходит вертикально через часть отсека 180 для хранения, поворотное колесо 192 и опорную платформу 150. Кроме того, соединительный узел 156 расположен так, что его ось в целом совпадает с осью 202 поворота. Соединительный узел 156 содержит соединительный элемент 230 колеса, соединительный элемент 232 платформы, верхний подшипник 236, нижний подшипник 237, направляющий элемент 160 и нижний кронштейн 238.
[061] Соединительный элемент 230 колеса расположен под верхней поверхностью отсека 180 для хранения и над верхней поверхностью 170 опорной платформы 150.
[062] Соединительный элемент 230 колеса имеет верхнюю часть 240, промежуточную часть 242 и нижнюю часть 244. По отношению к оси 202 поворота верхняя часть 240 расположена по существу радиально, промежуточная часть 242 отходит вниз от верхней части 240, а нижняя часть 244 расположена по существу радиально относительно промежуточной части 242.
[063] Верхняя часть 240 может по меньшей мере частично проходить через центральное отверстие 186 отсека 180 для хранения и содержит отверстие 246. Отверстие 246 проходит в вертикальном направлении через весь соединительный элемент 230 колеса. Отверстие 246 обеспечивает размещение в нем направляющего элемента 160. Верхняя часть 240, расположенная на его верхней стороне, имеет направляющий сегмент 241, который более подробно описан ниже. Верхняя часть 240 также содержит шпоночную канавку 247, обеспечивающую размещение в ней части шпонки 300. Кроме того, верхняя часть 240 имеет отходящую вниз кольцевую стенку 248.
[064] Размеры промежуточной части 242 выбраны таким образом, что верхняя часть 240 по существу частично находится в камере 181 для хранения, а нижняя часть 244 расположена по существу под нижней поверхностью поворотного колеса 192.
[065] Нижняя часть 244 жестко соединена с поворотным колесом 192 с помощью крепежных элементов 250. Предполагается, что в других вариантах осуществления нижняя часть 244 может быть соединена с поворотным колесом 192 иным способом. Таким образом, соединительный элемент 230 колеса жестко соединен с поворотным колесом 192.
[066] Соединительный элемент 232 платформы частично входит в соединительный элемент 230 колеса и частично проходит через отверстие 176 опорной платформы 150. Соединительный элемент 232 платформы содержит отверстие 260. Отверстие 260 проходит в вертикальном направлении через весь соединительный элемент 232 платформы. Таким образом, соединительный элемент 232 платформы имеет по существу трубчатую форму.
[067] На своем верхнем конце соединительный элемент 232 платформы имеет верхнее кольцевое углубление 262. Верхнее кольцевое углубление 262 проходит по всей окружности соединительного элемента 232 платформы и обеспечивает размещение в нем кольцевой стенки 248. Следует отметить, что верхнее кольцевое углубление 262 может быть по меньшей мере частично разнесено с кольцевой стенкой 248. Подобным образом, на своем нижнем конце соединительный элемент 232 платформы имеет нижнее кольцевое углубление 264. Нижнее кольцевое углубление 264 проходит по всей окружности соединительного элемента 232 платформы и обеспечивает размещение в нем кольцевой стенки 288 направляющего элемента 160. Следует отметить, что нижнее кольцевое углубление 264 также может быть по меньшей мере частично разнесено с кольцевой стенкой 288. Посередине по вертикали соединительный элемент 232 платформы имеет опорную часть 266. Опорная часть 266 отходит радиально внутрь (то есть в направлении к оси 202 поворота) и способна служить опорой для верхнего подшипника 236. Кроме того, на нижнем конце соединительного элемента 232 платформы предусмотрена соединительная часть 268, которая отходит радиально наружу (то есть в направлении от оси 202 поворота). Соединительная часть 268 упирается в нижнюю поверхность 172 опорной платформы 150 и жестко соединена с ней с помощью крепежных элементов 270 (фиг. 3). Таким образом, соединительный элемент 232 платформы жестко соединен с опорной платформой 150 крепежными элементами 270. Предполагается, что соединительный элемент 232 платформы может быть жестко соединен с опорной платформой 150 иным способом.
[068] Верхний и нижний подшипники 236, 237 расположены внутри соединительного элемента 232 платформы и в целом аналогичны друг другу. Верхний и нижний подшипники 236, 237 представляют собой конические роликовые подшипники. Предполагается, что здесь могут использоваться и другие типы подшипников. Каждый из верхнего и нижнего подшипников 236, 237 содержит внутреннее кольцо 290, множество тел 292 качения и наружное кольцо 294. В некоторых вариантах осуществления каждый из верхнего и нижнего подшипников 236, 237 может быть заполнен смазкой.
[069] Ниже приведено более подробное описание направляющего элемента 160. Направляющий элемент 160 расположен так, чтобы проходить через центральное отверстие 186 в отсеке 180 для хранения, отверстие 246 в верхней части 240, отверстие 260 в соединительном элементе 232 платформы и отверстие 176 в опорной платформе 150. Направляющий элемент 160 имеет направляющую часть 280 и соединительную часть 282.
[070] Направляющая часть 280 расположена параллельно оси 202 поворота и образует канал 282, который проходит также параллельно оси 202 поворота. Как описано ниже, канал 282 обеспечивает размещение в нем кабеля 164. Направляющая часть 280 также образует на своем верхнем конце вход 284 канала. Вход 284 канала ориентирован по существу ортогонально оси 202 поворота. В некоторых вариантах осуществления вход 284 канала может иметь изогнутую форму. На верхнем конце и на внешней поверхности направляющей части 280 дополнительно сформирована шпоночная канавка 286 для совмещения со шпоночным пазом 247 и размещения в ней части шпонки 300. Направляющий элемент 160 зафиксирован на соединительном элементе 230 колеса за счет взаимодействия шпонки 300 со шпоночной канавкой 247 и шпоночным пазом 286. Предполагается, что в других вариантах осуществления направляющий элемент 160 и соединительный элемент 230 колеса могут быть зафиксированы без возможности вращения относительно друг друга иным способом. Например, в некоторых вариантах осуществления направляющий элемент 160 может быть привинчен к соединительному элементу 230 колеса.
[071] Следует отметить, что направляющий сегмент 241 верхней части 240 расположен рядом с входом 284 канала.
[072] Соединительная часть 282 отходит по существу радиально от направляющей части 280 и расположена под опорной платформой 150. Соединительная часть 282 имеет кольцевую стенку 288, которая входит в нижнее кольцевое углубление 264. Соединительная часть 282 способна служить опорой нижнему подшипнику 237 на его верхней поверхности. Кроме того, соединительная часть 282 может жестко соединяться с нижним кронштейном 238.
[073] Нижний кронштейн 238, расположенный под опорной платформой 150, служит опорой для мотор-колеса 154. Соединение между нижним кронштейном 238 и мотор-колесом 154 выполнено таким образом, чтобы мотор-колесо 154 могло вращаться вокруг оси 220, а поворот нижнего кронштейна 238 вокруг оси 202 поворота вызывал поворот мотор-колеса 154 вокруг оси 202 поворота.
[074] Ниже приведено описание соединительного узла 156 в полностью собранном состоянии.
[075] Соединительный элемент 230 колеса жестко соединен с поворотным колесом 192, а верхняя часть 240 частично входит в камеру 181 для хранения через центральное отверстие 186.
[076] Соединительный элемент 232 платформы жестко соединен с опорной платформой 150. Соединительные элементы 230, 232 платформы и колеса расположены так, что часть соединительного элемента 232 платформы входит в соединительный элемент 230 колеса, а кольцевая стенка 248 входит в верхнее кольцевое углубление 262. Следует отметить, что в некоторых вариантах осуществления соединительные элементы 230, 232 платформы и колеса не соприкасаются друг с другом. Кольцевая стенка 248 и верхнее кольцевое углубление 262 образуют зазор между собой и формируют лабиринтное уплотнение, которое ограничивает проникновение пыли и мусора в верхний и нижний подшипники 236, 237 и/или утечку смазки из верхнего и нижнего подшипников 236, 238.
[077] Направляющий элемент 160 расположен так, что вход 284 канала в целом совмещен с камерой 181 для хранения. Направляющий элемент 160 зафиксирован без возможности вращения относительно соединительного элемента 230 колеса за счет размещения шпонки 300 в шпоночной канавке 247 и шпоночном пазе 286.
[078] Верхний подшипник 236 размещен в отверстии 260 соединительного элемента 232 платформы, а опорой ему служит опорная часть 266. Нижний подшипник 237 также размещен в отверстии 260 соединительного элемента 232 платформы, но опорой ему служит соединительная часть 282. Внутреннее кольцо 290 каждого из верхнего и нижнего подшипников 236, 237 соединено с направляющим элементом 160, а наружное кольцо 294 - с соединительным элементом 232 платформы. Таким образом, верхний и нижний подшипники 226, 237 обеспечивают поворот направляющего элемента 160 вокруг оси 202 поворота относительно опорной платформы 150.
[079] Благодаря соединительному узлу 156 поворот поворотного колеса 192 вокруг оси 202 поворота вызывает поворот соединительного элемента 232 платформы, направляющего элемента 160, нижнего кронштейна 238 и мотор-колеса 154 вокруг оси 202 поворота относительно опорной платформы 150.
[080] Контроллер 162 соединен с опорной платформой 150. В показанном варианте осуществления контроллер 162 расположен под нижней поверхностью 172 опорной платформы. Предполагается, что в других вариантах осуществления контроллер 162 может располагаться над верхней поверхностью 170. Контроллер 162 связан с электродвигателем 190 поворота и мотор-колесом 154.
[081] В некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии контроллер 162 содержит процессор. В некоторых вариантах осуществления настоящей технологии процессор может содержать один или несколько процессоров и/или один или несколько микроконтроллеров, обеспечивающих исполнение команд и выполнение операций, связанных с работой робота-инвентаризатора 100. В различных не имеющих ограничительного характера вариантах осуществления настоящей технологии процессор может быть реализован в виде однокристальной микросхемы, многокристальной микросхемы и/или других электрических элементов, содержащих одну или несколько интегральных схем и печатных плат. Процессор может дополнительно содержать модуль кэш-памяти для временного локального хранения команд, данных или дополнительной компьютерной информации. Например, процессор может содержать один или несколько процессоров или один или несколько контроллеров, предназначенных для выполнения тех или иных задач обработки в роботе-инвентаризаторе 100, или один многофункциональный процессор или контроллер. Кроме того, явное использование термина «процессор» или «контроллер» не должно трактоваться как указание исключительно на аппаратные средства, способные обеспечивать работу программного обеспечения, и может подразумевать, среди прочего, аппаратные средства цифрового сигнального процессора (DSP), сетевой процессор, специализированную интегральную схему (ASIC), программируемую вентильную матрицу (FPGA), ПЗУ для хранения программного обеспечения, ОЗУ и энергонезависимое ЗУ.
[082] Кроме того, в соответствии с некоторыми не имеющими ограничительного характера вариантами осуществления настоящей технологии, контроллер может содержать модуль связи (не показан). Такой модуль связи может устанавливать связь по одному из протоколов связи (беспроводной или проводной), обеспечивая подключение процессора к другим электронным устройствам или к удаленным серверам. Примерами реализации модуля связи, среди прочего, являются модуль связи Bluetooth™, модуль связи UART™, модуль связи Wi-Fi™, модуль связи LTE™ и т.п.
[083] В соответствии с не имеющими ограничительного характера вариантами осуществления настоящей технологии, связь между контроллером и другими электрическими и электронными элементами робота-инвентаризатора 100, такими как электродвигатель 190 поворота, как поясняется в приведенном ниже описании, может осуществляться через одну или несколько внутренних и/или внешних шин (таких как шина PCI, шина USB, шина FireWire стандарта IEEE 1394, шина SCSI, шина Serial-ATA и т.д.), с которыми совместимы все эти электрические и электронные элементы.
[084] Ниже со ссылкой на фиг. 2 и 4-8 более подробно описан кабель 164. Один конец кабеля 164 подключен к контроллеру 162, а другой конец - к мотор-колесу 154. Кабель 164 обеспечивает передачу сигналов от контроллера 162 к мотор-колесу 154. В некоторых вариантах осуществления такими сигналами могут быть управляющие сигналы для управления движением мотор-колеса 154 и/или сигналы питания для питания мотор-колеса 154. В некоторых вариантах осуществления кабель 164 также обеспечивает подачу питания для мотор-колеса 154. Кабель 164 имеет секцию 310 кабеля и секцию 312 кабеля. В настоящем варианте осуществления используется один кабель 164. При этом предполагается, что в других вариантах осуществления могут использоваться несколько кабелей, которые могут быть объединены в жгут.
[085] Секция 310 кабеля подключена к контроллеру 162. Секция 310 кабеля проходит от контроллера 162 в камеру 181 для хранения. Секция 310 кабеля проходит через отверстие 188, выполненное в опорной платформе 150. Секция 310 кабеля направляется к боковому отверстию 184 в отсеке 180 для хранения с помощью кабельного держателя 189, который прикреплен к верхней поверхности 170 опорной платформы 150. Секция 310 кабеля плотно соединена с кабельным держателем 189 (например, зажата им). Далее секция 310 кабеля размещается и хранится в камере 181 для хранения. Секция 310 кабеля наматывается на направляющий элемент 160. Предполагается, что секция 310 кабеля может быть намотана на направляющий элемент 160 лишь частично. Как описано ниже, секция 310 кабеля способна компенсировать изменение длины кабеля 164, необходимое для поворота мотор-колеса 154.
[086] Секция 312 кабеля проходит в канал 282 через вход 284 канала. Секция 312 кабеля выходит из канала 282 под направляющим элементом 160 и направляется к мотор-колесу 154 с помощью нижнего кронштейна 238. Следует отметить, что секция 312 кабеля в целом зафиксирована на направляющем элементе 160. В настоящем варианте осуществления секция 312 кабеля в целом зафиксирована на направляющем элементе 160 прижимным элементом 320. Прижимной элемент 320 расположен рядом с входом 284 канала и прижимает кабель 164 к направляющему элементу 160. Прижимной элемент 320 представляет собой сферический элемент, изготовленный из упругого материала. В других вариантах осуществления прижимной элемент 230 может иметь несферическую форму. Упругим материалом может быть полимерный материал. Предполагается, что в других вариантах осуществления секция 312 кабеля может быть зафиксирована на направляющем элементе 160 иным способом, например, с помощью клея.
[087] Ниже со ссылкой на фиг. 4, 7 и 8 приведено более подробное описание того, как контроллер 162 обеспечивает поворот мотор-колеса 154 вокруг оси 202 поворота в колесном узле 104.
[088] На фиг. 4 колесный узел 104 находится в исходном состоянии. В исходном состоянии мотор-колесо 154 ориентировано по существу в прямом направлении, а секция 310 кабеля намотана на направляющий элемент 160 и находится в нейтральном положении.
[089] На фиг. 7 мотор-колесо 154 повернуто вокруг оси 202 поворота в направлении против часовой стрелки. Соответственно, электродвигатель 190 поворота обеспечил вращение звездочки 204. Звездочка 204, в свою очередь, через ремень 206 привела в движение поворотное колесо 192. Поворот поворотного колеса 192, как указано выше, вызвал поворот направляющего элемента 160 и мотор-колеса 154. При повороте мотор-колеса 154 вокруг оси 202 поворота расстояние между контроллером 162 и мотор-колесом 154 изменяется, в связи с чем изменяется и необходимая длина кабеля 164 между контроллером 162 и мотор-колесом 154. В частности, необходимая длина кабеля 164 увеличивается. Поскольку секция 310 кабеля зажата между кабельным держателем 189 и каналом 184, она наматывается на направляющий элемент 160 в свернутое положение, чтобы компенсировать изменение длины. В некоторых вариантах осуществления секция 310 кабеля может опираться на направляющий сегмент 241 для обеспечения намотки секции 310 кабеля.
[090] Предполагается, что обусловленный намоткой запас длины кабеля 164 позволяет мотор-колесу 154 поворачиваться на угол более 270 градусов. В некоторых вариантах осуществления мотор-колесо 154 способно поворачиваться на угол приблизительно 360 градусов.
[091] На фиг. 8 мотор-колесо 154 повернуто вокруг оси 202 поворота в направлении по часовой стрелке. При повороте мотор-колеса 154 вокруг оси 202 поворота расстояние между контроллером 162 и мотор-колесом 154 изменяется, в связи с чем изменяется и необходимая длина кабеля 164 между контроллером 162 и мотор-колесом 154. В частности, необходимая длина кабеля 164 уменьшается. Поскольку секция 310 кабеля зажата между кабельным держателем 189 и каналом 184, она сматывается с направляющего элемента 160 в развернутое положение, чтобы компенсировать изменение длины. В некоторых вариантах осуществления секция 310 кабеля может упираться в направляющий сегмент 241 для обеспечения сохранения намотки секции 310 кабеля.
[092] На фиг. 9 показан альтернативный вариант осуществления опорного колесного узла 104, а именно опорный колесный узел 1104. Элементы опорного колесного узла 1104, аналогичные элементам опорного колесного узла 104, имеют те же позиционные обозначения и их описание здесь не повторяется. Колесный узел 1104 заметно отличается от колесного узла 104 тем, что отсек 180 для хранения в нем заменен на катушку 1180. Катушка 1180 имеет верхний диск 1181 и нижний 1182. Кабель 164 может размещаться между верхним и нижним дисками 1181, 1182.
[093] Для специалиста в данной области могут быть очевидными возможные изменения и усовершенствования описанных выше вариантов осуществления настоящей технологии. Предшествующее описание приведено лишь в иллюстративных целях, а не для ограничения объема изобретения. Объем охраны настоящей технологии определяется исключительно объемом приложенной формулы изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| РОБОТИЗИРОВАННОЕ ТРАНСПОРТНОЕ СРЕДСТВО И ОПОРНЫЙ УЗЕЛ ЕГО КОЛЕСА | 2022 |
|
RU2830639C2 |
| РОБОТИЗИРОВАННАЯ СИСТЕМА, ОСНАЩЕННАЯ ПОЗИЦИОНЕРАМИ ПЛАТФОРМ, И РОБОТИЗИРОВАННОЕ ТРАНСПОРТНОЕ СРЕДСТВО, ОСНАЩЕННОЕ ПОЗИЦИОНЕРАМИ ПЛАТФОРМ | 2023 |
|
RU2831415C1 |
| РОБОТИЗИРОВАННОЕ ТРАНСПОРТНОЕ УСТРОЙСТВО ДЛЯ МОБИЛЬНОГО РОБОТИЗИРОВАННОГО РЕМОНТНО-ДИАГНОСТИЧЕСКОГО КОМПЛЕКСА | 2023 |
|
RU2806129C1 |
| РОБОТИЗИРОВАННОЕ ТРАНСПОРТНОЕ СРЕДСТВО И МЕХАНИЗМ УПРАВЛЕНИЯ ЕГО КРЫШКОЙ | 2022 |
|
RU2831317C2 |
| ПРИЦЕПНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2018 |
|
RU2770048C2 |
| РОБОТИЗИРОВАННАЯ МОДУЛЬНАЯ ТЕЛЕЖКА | 2023 |
|
RU2800784C1 |
| РОБОТИЗИРОВАННЫЙ МНОГОФУНКЦИОНАЛЬНЫЙ ТРАКТОР-ВЕЗДЕХОД | 2022 |
|
RU2783560C1 |
| ХИРУРГИЧЕСКОЕ УСТРОЙСТВО С РОБОТИЗИРОВАННЫМ ПРИВОДОМ И АКТИВИРУЕМОЙ ВРУЧНУЮ РЕВЕРСИРУЮЩЕЙ СИСТЕМОЙ | 2013 |
|
RU2641977C2 |
| СКЛАДЫВАЕМЫЙ РУЛЕВОЙ МЕХАНИЗМ ВЕЛОСИПЕДА (ВАРИАНТЫ) | 2015 |
|
RU2687534C2 |
| Мобильное роботизированное устройство | 2023 |
|
RU2829775C2 |
Группа изобретений относится к колесным узлам для роботизированных транспортных средств и к оснащенным ими роботизированным транспортным средствам. Колесный узел для роботизированного транспортного средства включает в себя опорную платформу, контроллер, поворотный узел, направляющий элемент, образующий канал, мотор-колесо и кабель, содержащий первую секцию, проходящую через канал, функционально связанную с мотор-колесом и зафиксированную относительно направляющего элемента, и вторую секцию, функционально связанную с контроллером и по меньшей мере частично намотанную на направляющий элемент в нейтральном положении. При повороте мотор-колеса в первом направлении вторая секция кабеля наматывается на направляющий элемент в свернутое положение, в котором запас длины служит для обеспечения возможности поворота мотор-колеса. При повороте мотор-колеса во втором направлении вторая секция кабеля по меньшей мере частично сматывается с направляющего элемента в развернутое положение, в котором запас длины увеличен в сравнении с нейтральным положением. Достигается снижение износа колесного узла и повышение его работоспособности. 2 н. и 17 з.п. ф-лы, 9 ил.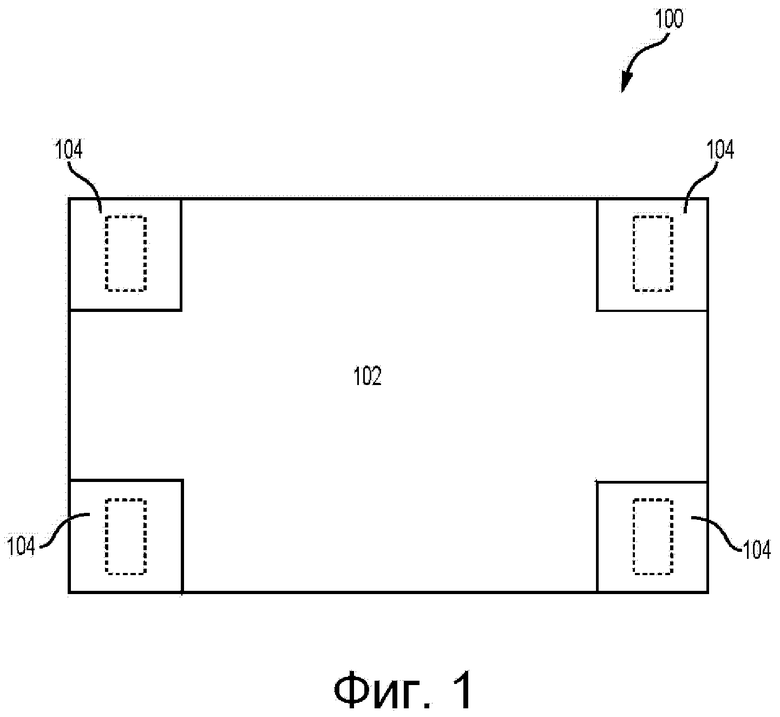
1. Колесный узел для роботизированного транспортного средства, включающий в себя:
- опорную платформу, способную соединяться с рамой роботизированного транспортного средства;
- контроллер, соединенный с опорной платформой;
- поворотный узел, соединенный с опорной платформой;
- направляющий элемент, функционально связанный с поворотным узлом так, чтобы обеспечивался его поворот вокруг оси поворота, и образующий канал;
- мотор-колесо, функционально связанное с поворотным узлом так, чтобы обеспечивался его поворот вокруг оси поворота;
- кабель для передачи сигналов от контроллера к мотор-колесу, содержащий первую секцию, проходящую через канал, функционально связанную с мотор-колесом и зафиксированную относительно направляющего элемента, и вторую секцию, функционально связанную с контроллером, которая в нейтральном положении по меньшей мере частично намотана на направляющий элемент для обеспечения запаса длины кабеля при повороте мотор-колеса, причем при повороте мотор-колеса под действием поворотного узла вокруг оси поворота в первом направлении вторая секция кабеля наматывается на направляющий элемент в свернутое положение, в котором запас длины обеспечивает возможность поворота мотор-колеса, а при повороте мотор-колеса под действием поворотного узла вокруг оси поворота во втором направлении вторая секция кабеля по меньшей мере частично сматывается с направляющего элемента в развернутое положение, в котором запас длины увеличен в сравнении с нейтральным положением.
2. Колесный узел по п. 1, в котором первая секция кабеля, размещенная в канале, прижата к направляющему элементу прижимным элементом.
3. Колесный узел по п. 2, в котором прижимной элемент представляет собой полимерный сферический элемент.
4. Колесный узел по п. 2, в котором прижимной элемент способен прижимать кабель к направляющему элементу на входе канала.
5. Колесный узел по п. 1, дополнительно содержащий упорный сегмент, расположенный рядом с входом канала и способный упираться в кабель при повороте направляющего элемента под действием поворотного узла.
6. Колесный узел по п. 1, в котором поворотный узел содержит электродвигатель поворота, соединенный с опорной платформой.
7. Колесный узел по п. 6, в котором поворотный узел содержит поворотное колесо, соединенное с опорной платформой с возможностью его вращения и способное поворачиваться вокруг оси поворота.
8. Колесный узел по п. 7, в котором электродвигатель соединен с поворотным колесом трансмиссией.
9. Колесный узел по п. 1, в котором поворотный узел расположен над верхней поверхностью опорной платформы, а мотор-колесо расположено под нижней поверхностью опорной платформы, при этом направляющий элемент проходит через платформу таким образом, что канал образует путь для первой секции кабеля сквозь платформу.
10. Колесный узел по п. 1, в котором канал расположен параллельно оси поворота.
11. Колесный узел по п. 1, дополнительно содержащий отсек для хранения, образующий камеру для хранения второй секции кабеля.
12. Колесный узел по п. 1, дополнительно содержащий катушку, функционально связанную с поворотным узлом и обеспечивающую хранение второй секции кабеля.
13. Колесный узел по п. 1, представляющий собой модульный колесный узел, выборочно соединенный с рамой роботизированного транспортного средства.
14. Колесный узел по п. 1, в котором сигналы включают в себя управляющие сигналы для управления движением мотор-колеса и/или сигналы питания для питания мотор-колеса.
15. Роботизированное транспортное средство, содержащее раму и по меньшей мере один колесный узел, охарактеризованный в п. 1 и способный соединяться с рамой.
16. Роботизированное транспортное средство по п. 15, в котором по меньшей мере один колесный узел выборочно соединен с рамой.
17. Роботизированное транспортное средство по п. 15, в котором по меньшей мере один колесный узел способен выборочно соединяться с рамой в первой и второй конфигурациях.
18. Роботизированное транспортное средство по п. 17, в котором по меньшей мере один колесный узел, выборочно соединенный с рамой в первой конфигурации, представляет собой левый передний колесный узел и/или левый задний колесный узел роботизированного транспортного средства.
19. Роботизированное транспортное средство по п. 17, в котором по меньшей мере один колесный узел, выборочно соединенный с рамой во второй конфигурации, представляет собой правый передний колесный узел и/или правый задний колесный узел роботизированного транспортного средства.
| US 2020172139 A1, 04.06.2020 | |||
| Ленточно-цепной конвейер | 1959 |
|
SU125509A1 |
| ДВУХКОМПОНЕНТНЫЙ ДИСТАНЦИОННЫЙ МАНИПУЛЯТОР | 2005 |
|
RU2363570C2 |
| Магнитный интегратор | 1961 |
|
SU147335A1 |
| US 2005023052 A1, 03.02.2005. | |||

