ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
[0001] Раскрытие относится, в общем, к способам, системам и механизмам для автоматизированного вождения или помощи при вождении и, в частности, относится к идентификации, определению местоположения и навигации в отношении устройств для приема оградительных столбиков.
УРОВЕНЬ ТЕХНИКИ
[0002] Автомобили обеспечивают значительную часть перевозок для коммерческих, государственных и частных структур. Из-за высокой стоимости автомобилей и потенциального вреда для пассажиров и водителей безопасность водителя и избежание столкновений, аварий или другого повреждения транспортных средств являются чрезвычайно важными. Например, устройства для приема оградительных столбиков часто располагаются на улице или проезжей части и используются для установки оградительных столбиков (например, стоек), которые устанавливаются на улице или проезжей части для направления или перекрытия дорожного движения по части улицы или проезжей части. Когда оградительные столбики удалены из устройств для приема оградительных столбиков, устройства для приема оградительных столбиков остаются на улице или проезжей части и могут вызывать повреждение участков транспортного средства, если транспортное средство проезжает над устройством для приема оградительного столбика. Таким образом, важно идентифицировать и определять местоположение потенциальных проблем на улице или проезжей части, таких как устройства для приема оградительных столбиков, для избежания потенциального повреждения транспортного средства.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Способ, содержащий этапы, на которых:
принимают данные восприятия от одного или более датчиков восприятия транспортного средства;
определяют, на основе данных восприятия, местоположение одного или более устройств для приема оградительных столбиков в отношении корпуса транспортного средства; и
обеспечивают указание местоположения одного или более устройств для приема оградительных столбиков для одного или более из водителя и компонента решения о маневре движения.
Способ, дополнительно содержащий этап, на котором определяют местоположение в отношении корпуса на основе информации от шины локальной сети контроллеров (CAN) транспортного средства.
Способ, в котором этап, на котором определяют местоположение, содержит определение, дополнительно основанное на истории вождения транспортного средства.
Способ, в котором один или более датчиков восприятия содержат два или более из камеры, радарного датчика, лазерного датчика обнаружения и измерения дальности (LIDAR), радарного датчика и ультразвукового датчика.
Способ, дополнительно содержащий этап, на котором определяют высоту устройства для приема оградительного столбика на основе данных восприятия.
Способ, дополнительно содержащий этап, на котором определяют маневр движения на основе местоположения одного или более устройств для приема оградительных столбиков.
Способ, дополнительно содержащий этап, на котором определяют запас безопасности для шин транспортного средства в отношении одного или более устройств для приема оградительных столбиков, причем определение маневра движения содержит этап, на котором определяют маневр движения для избежания движения шины транспортного средства в пределах запаса безопасности одного или более устройств для приема оградительных столбиков.
Способ, дополнительно содержащий этап, на котором определяют маневр движения, содержащий проезд над устройством для приема оградительного столбика из одного или более устройств для приема оградительных столбиков с использованием участка протектора шины транспортного средства.
Способ, дополнительно содержащий этап, на котором регулируют активную подвеску транспортного средства на основе наличия одного или более устройств для приема оградительных столбиков.
Способ, дополнительно содержащий этап, на котором записывают информацию об устройстве для приема оградительного столбика в историю вождения.
Система, содержащая:
компонент данных восприятия, выполненный с возможностью приема данных восприятия от одного или более датчиков восприятия транспортного средства;
компонент местоположения, выполненный с возможностью определения, на основе данных восприятия, местоположения одного или более устройств для приема оградительных столбиков в отношении корпуса транспортного средства; и
компонент маневра движения, выполненный с возможностью определения маневра движения для избежания или уменьшения повреждения транспортного средства на основе местоположения одного или более устройств для приема оградительных столбиков.
Система, в которой компонент маневра движения дополнительно выполнен с возможностью определения запаса безопасности для шин транспортного средства в отношении одного или более устройств для приема оградительных столбиков, причем компонент маневра движения выполнен с возможностью выбора маневра движения, чтобы заставлять каждую шину транспортного средства либо избегать попадания в пределы запаса безопасности одного или более устройств для приема оградительных столбиков, либо ударяться об устройство для приема оградительного столбика из одного или более устройств для приема оградительных столбиков участком протектора.
Система, дополнительно содержащая компонент подвески, выполненный с возможностью регулировки подвески транспортного средства на основе наличия одного или более устройств для приема оградительных столбиков, причем регулировка подвески транспортного средства содержит одну или более из регулировки высоты участка транспортного средства и регулировки жесткости подвески участка транспортного средства.
Система, дополнительно содержащая компонент уведомления, выполненный с возможностью одного или более из:
обеспечения маневра движения в качестве предложения для водителя транспортного средства; и
обеспечения маневра движения для системы управления транспортным средством транспортного средства для выполнения маневра движения.
Считываемые компьютером носители хранения, хранящие инструкции, которые, при исполнении одним или более процессорами, заставляют один или более процессоров:
принимать данные восприятия от одного или более датчиков восприятия транспортного средства;
определять, на основе данных восприятия, местоположение одного или более устройств для приема оградительных столбиков в отношении корпуса транспортного средства; и
обеспечивать указание местоположения одного или более устройств для приема оградительных столбиков для одного или более из водителя и системы автоматизированного вождения.
Считываемые компьютером носители хранения, в которых инструкции дополнительно заставляют один или более процессоров записывать информацию об одном или более устройствах для приема оградительных столбиков в историю вождения, причем информация об одном или более устройствах для приема оградительных столбиков содержит одно или более из:
местоположения одного или более устройств для приема оградительных столбиков;
высоты по меньшей мере одного из одного или более устройств для приема оградительных столбиков; и
пути, проезжаемого транспортным средством в отношении одного или более устройств для приема оградительных столбиков.
Считываемые компьютером носители хранения, в которых инструкции дополнительно заставляют один или более процессоров определять путь движения на основе местоположения устройства для приема оградительного столбика для избежания или уменьшения повреждения транспортного средства.
Считываемые компьютером носители хранения, в которых инструкции дополнительно заставляют один или более процессоров определять запас безопасности для шин транспортного средства в отношении одного или более устройств для приема оградительных столбиков, причем определение пути движения содержит определение пути движения, который заставляет каждую шину транспортного средства либо избегать движения шины транспортного средства в пределах запаса безопасности одного или более устройств для приема оградительных столбиков, либо ударяться об устройство для приема оградительного столбика из одного или более устройств для приема оградительных столбиков участком протектора.
Считываемые компьютером носители хранения, в которых инструкции дополнительно заставляют один или более процессоров определять высоту одного или более устройств для приема оградительных столбиков в отношении поверхности дороги и определять путь движения дополнительно на основе высоты.
Считываемые компьютером носители хранения, в которых инструкции дополнительно заставляют один или более процессоров регулировать активную подвеску транспортного средства на основе наличия одного или более устройств для приема оградительных столбиков.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0003] Неограничивающие и неисчерпывающие варианты осуществления настоящего раскрытия описаны со ссылкой на следующие фигуры, на которых одинаковые ссылочные позиции относятся к одинаковым частям на всех различных видах, если не определено иное. Преимущества настоящего раскрытия будут лучше поняты в отношении следующего описания и сопровождающих чертежей, на которых:
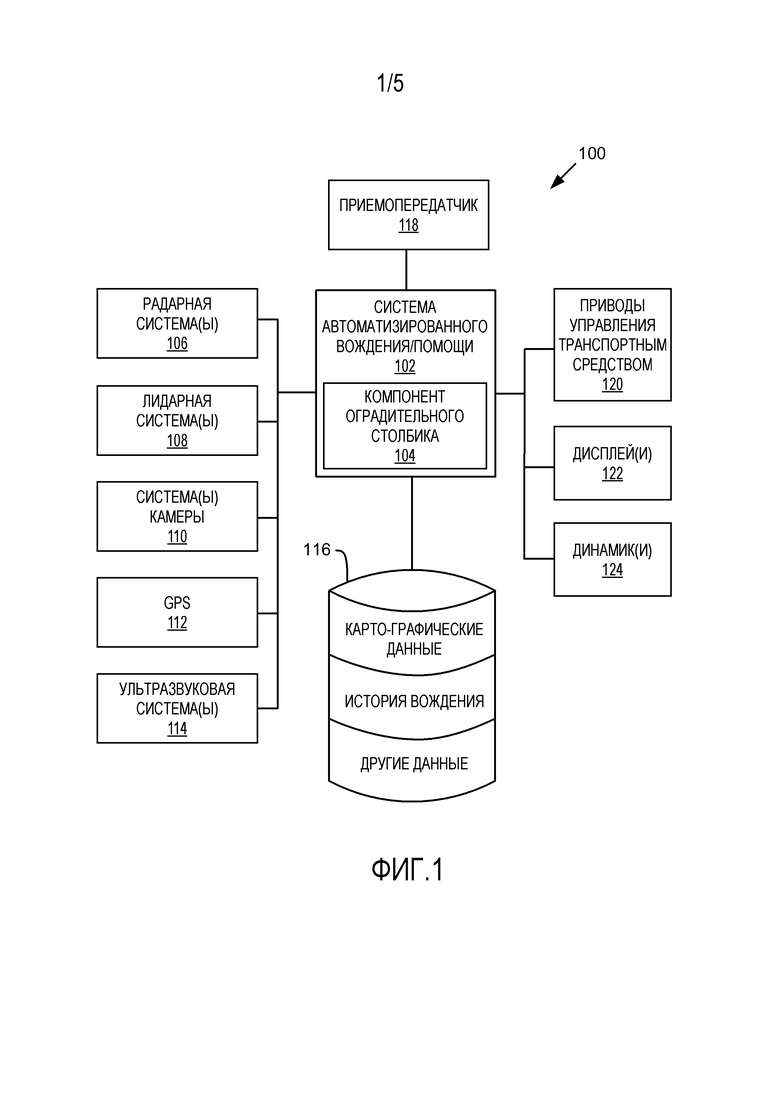
[0004] Фиг. 1 представляет собой схематическую блок-схему, иллюстрирующую осуществление системы управления транспортным средством, которая включает в себя систему автоматизированного вождения/помощи;
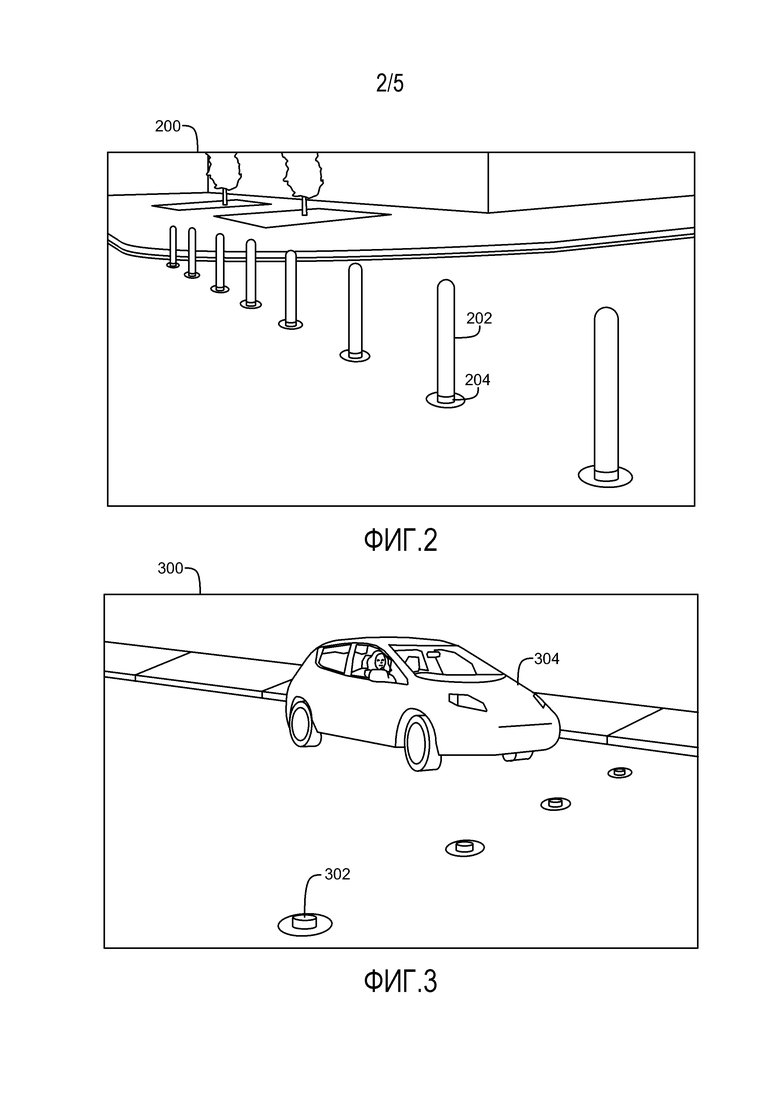
[0005] Фиг. 2 иллюстрирует множество оградительных столбиков, расположенных в устройствах для приема оградительных столбиков, согласно одному осуществлению;
[0006] Фиг. 3 иллюстрирует множество устройств для приема оградительных столбиков с удаленными оградительными столбиками согласно одному осуществлению;
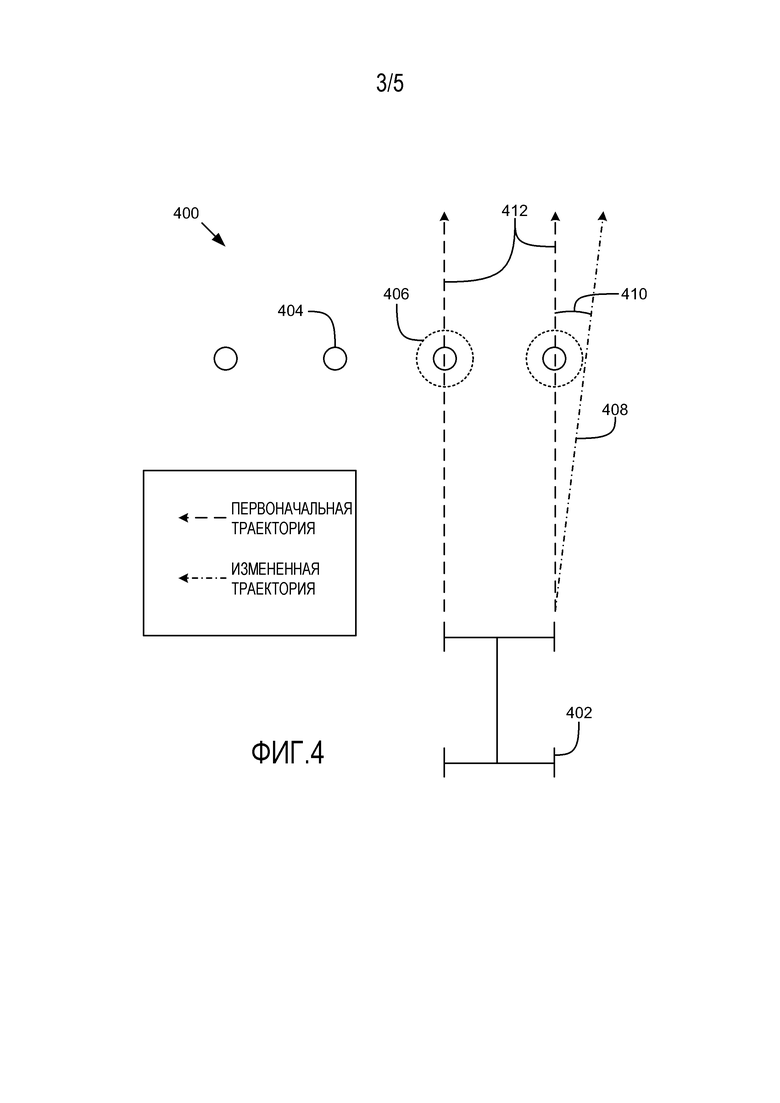
[0007] Фиг. 4 представляет собой схематическое изображение вида сверху, иллюстрирующее изменение траектории на основе наличия устройств для приема оградительных столбиков согласно одному осуществлению;
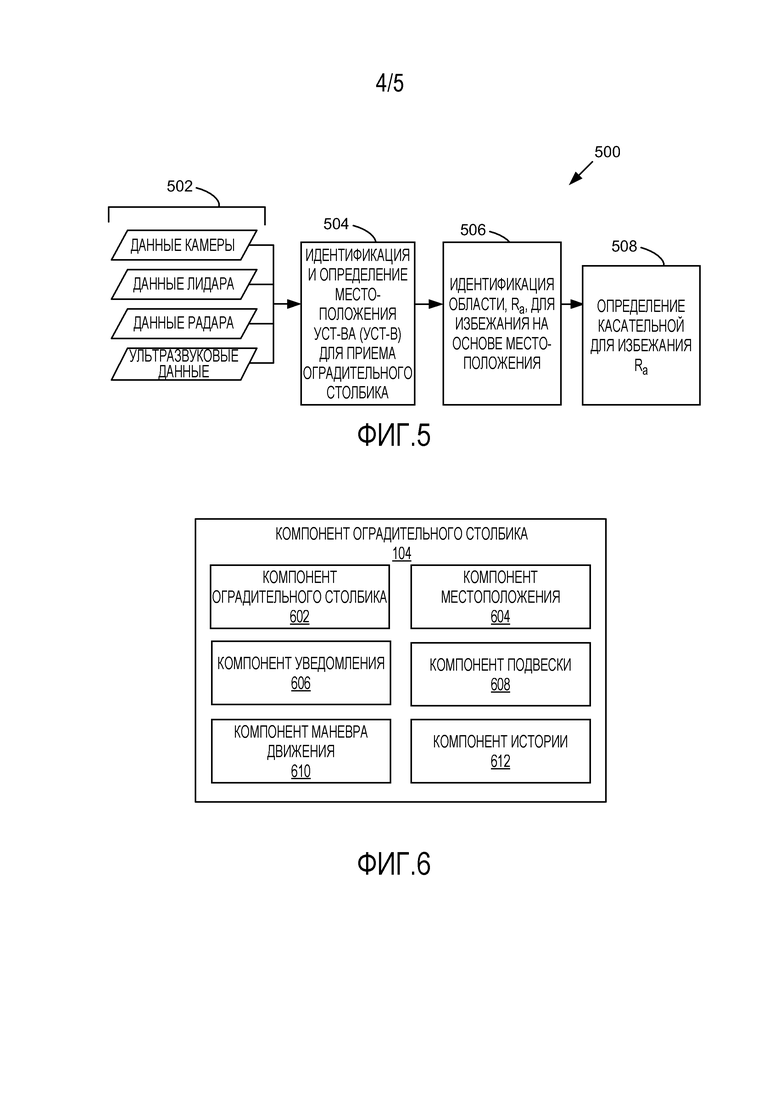
[0008] Фиг. 5 представляет собой схематическое изображение, иллюстрирующее способ определения изменения курса для транспортного средства согласно одному осуществлению;
[0009] Фиг. 6 представляет собой схематическую блок-схему, иллюстрирующую примерные компоненты компонента оградительного столбика согласно одному осуществлению; и
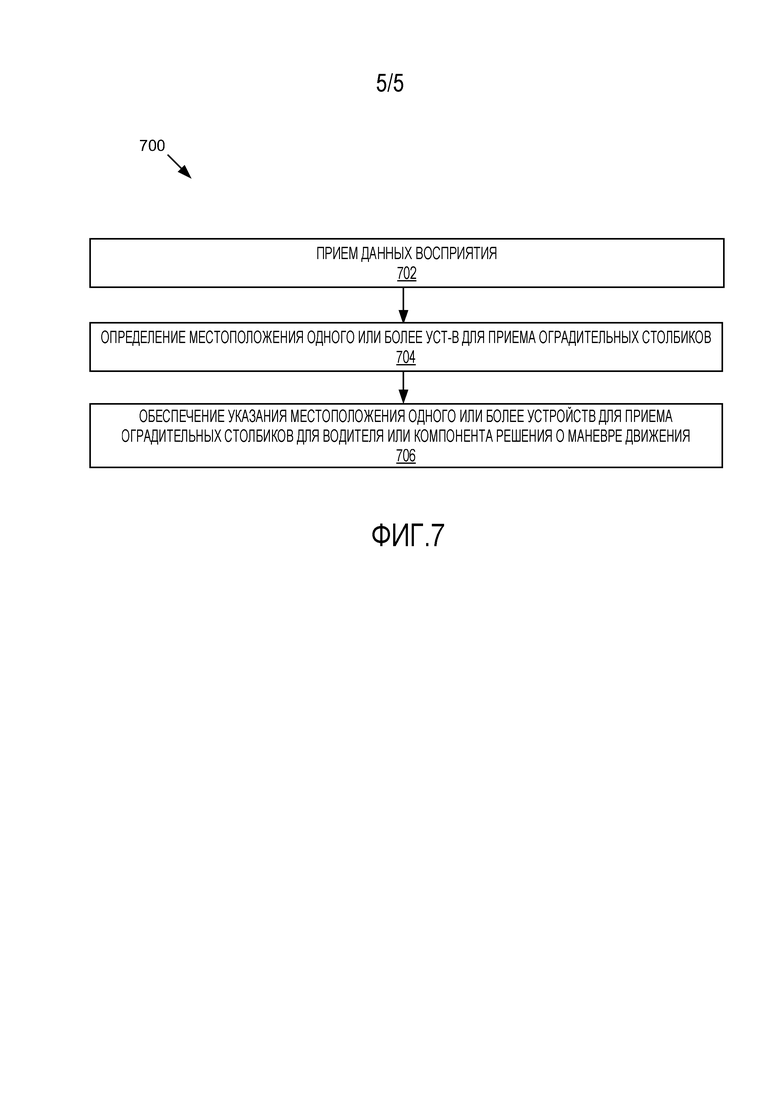
[0010] Фиг. 7 представляет собой схематическое изображение блок-схемы последовательности операций, иллюстрирующее способ обнаружения устройств для приема оградительных столбиков согласно одному варианту осуществления.
ПОДРОБНОЕ ОПИСАНИЕ
[0011] Раскрытие относится, в общем, к способам, системам и аппаратам для автоматизированного вождения или помощи при вождении и, в частности, относится к идентификации, определению местоположения и навигации в отношении устройств для приема оградительных столбиков. Оградительные столбики представляют собой короткие вертикальные стойки, которые иногда используются для направления, изменения маршрута или перекрытия дорожного движения по проезжей части. Для того, чтобы обеспечивать гибкость при перекрытии или изменении маршрута дорожного движения некоторые оградительные столбики являются удаляемыми и могут быть выборочно установлены в устройстве для приема оградительного столбика. С удаленными оградительными столбиками транспортным средствам может быть позволено проезжать. Однако эти устройства для приема оградительных столбиков могут вызывать серьезное повреждение транспортного средства, если они не замечены, и транспортное средство проезжает над ними. Конкретно, проезд над устройствами для приема оградительных столбиков может вызывать повреждение шин транспортного средства или других участков транспортного средства. Например, на устройствах для приема оградительных столбиков могут образовываться острые края, которые могут разрезать или прорезать шины. В качестве другого примера, в зависимости от того, насколько высоко устройства для приема оградительных столбиков выступают над землей, части под транспортным средством, такие как передняя подвеска, могут ударяться об устройства для приема оградительных столбиков и повреждаться.
[0012] Настоящее раскрытие описывает системы, способы и устройства для обнаружения устройств для приема оградительных столбиков и избежания повреждения транспортного средства. Согласно одному варианту выполнения, способ включает в себя прием данных восприятия от одного или более датчиков восприятия транспортного средства и определение, на основе данных восприятия, местоположения одного или более устройств для приема оградительных столбиков в отношении корпуса транспортного средства. Способ также включает в себя обеспечение указания местоположения одного или более устройств для приема оградительных столбиков для одного или более из водителя и компонента решения о маневре движения.
[0013] Данные восприятия могут принимать от датчиков или других источников данных для системы вождения. Например, данные восприятия могут включать в себя данные от камеры, радарной системы, лазерной системы обнаружения и измерения дальности (LIDAR), ультразвуковой системы и/или шины локальной сети контроллеров (CAN) транспортного средства. Любые из этих данных датчиков могут обеспечивать в качестве входных данных для алгоритма слияния, обученного обнаружению и/или определению местоположения устройств для приема оградительных столбиков.
[0014] В одном варианте выполнения система или способ может определять X-, Y- и Z-местоположение устройства для приема оградительного столбика со ссылкой на систему координат корпуса транспортного средства. Например, входные данные датчика могут быть скомбинированы для оценки местоположения устройств для приема оградительных столбиков со ссылкой на транспортное средство. Дополнительно, с использованием информации от шины CAN, такой как тангаж, скорость транспортного средства и высота (например, высота одного или более участков ходовой части транспортного средства), может быть точно определено положение передних колес. X-, Y- и Z-местоположение устройств для приема оградительных столбиков может быть использовано транспортным средством (или водителем) для навигации через устройство для приема оградительного столбика без причинения какого-либо повреждения транспортному средству. Более того, высота и другая информация о местоположении могут быть использованы для определения того, как управлять активной подвеской транспортного средства для уменьшения или избежания повреждения транспортного средства или для увеличения комфорта в случае, когда невозможно избежать устройства для приема оградительного столбика. Система может альтернативно или дополнительно обеспечивать предупреждение для водителя-человека так, что может быть предотвращено повреждение автомобиля. Таким образом, обнаружение и определение местоположения системой может быть использовано для автоматического предупреждения водителя-человека, системы автоматизированного вождения или системы помощи при вождении или для увеличения комфорта водителя или пассажира без дополнительных затрат на датчики для системы.
[0015] Настоящее раскрытие также описывает системы, способы и устройства для навигации через или вокруг устройств для приема оградительных столбиков. Например, после использования данных от датчиков для точного обнаружения наличия устройств для приема оградительных столбиков, может быть необходимо вычислять наилучший или самый безопасный путь над, между или вокруг устройств для приема оградительных столбиков для обеспечения отсутствия повреждения или минимального повреждения транспортного средства. В одном варианте выполнения система восприятия транспортного средства использует датчики транспортного средства для обнаружения наличия устройств для приема оградительных столбиков на проезжей части впереди. Затем узнают местоположение (т.е. X, Y-положение или размер), а также высоту (т.е. Z-размер) каждого устройства для приема в отношении системы координат транспортного средства. Со знанием высоты подвески транспортного средства над землей может быть предпринято управляющее действие для нажатия на тормоза и остановки, если высота устройства для приема больше высоты подвески транспортного средства, или может быть предпринято действие для маневрирования или прохождения вокруг устройств для приема, если это возможно.
[0016] В одном варианте выполнения, если высота устройства для приема оградительного столбика не больше высоты подвески транспортного средства, то транспортному средству по-прежнему необходимо осуществлять самонавигацию так, чтобы предотвращать повреждение колес транспортного средства устройствами для приема оградительных столбиков. Для обеспечения того, что никакая часть транспортного средства не повреждается, система может обеспечивать соблюдение запаса безопасности (например, такого как около 0,3048 м (один фут)) между каждым колесом транспортного средства и устройствами для приема оградительных столбиков.
[0017] Согласно одному варианту осуществления, круг с радиусом, равным запасу безопасности, и с центром в устройстве для приема оградительного столбика определяется как область, которую следует избегать шинам транспортного средства. Вычисляется угол, образованный между осью X системы координат корпуса транспортного средства (например, продольной осью рамы транспортного средства) и касательной от центра переднего моста до края круга. В одном варианте выполнения касательная всегда изображена по направлению в сторону от встречного дорожного движения. Например, касательная может быть изображена в правую сторону в средах с правосторонним движением, так как это будет заставлять транспортное средство проезжать по обочине при необходимости, в отличие от въезда на полосу встречного дорожного движения. Угол между осью X и касательной может быть использован в качестве желаемого курсового угла транспортного средства. Система управления транспортным средством может минимизировать отклонение между текущим курсовым углом транспортного средства и желаемым углом и в процессе безопасно осуществлять навигацию мимо устройств для приема оградительных столбиков, не вызывая никакого повреждения транспортного средства. В одном варианте выполнения предпринимается дополнительное усилие для предотвращения вступления боковин шин в контакт с устройствами для приема оградительных столбиков, так как они могут иметь острые края, и повреждение боковин обычно не подлежит ремонту по правилам и может вызывать особенно внезапный спуск.
[0018] Теперь со ссылкой на Фигуры, Фиг. 1 иллюстрирует примерную систему 100 управления транспортным средством, которая может быть использована для автоматического обнаружения устройств для приема оградительных столбиков. Система 102 автоматизированного вождения/помощи может быть использована для автоматизации или управления работой транспортного средства или для обеспечения помощи водителю-человеку. Например, система 102 автоматизированного вождения/помощи может управлять одним или более из торможения, рулевого управления, ускорения, световых приборов, оповещений, уведомлений водителя, радио или любыми другими вспомогательными системами транспортного средства. В другом примере система 102 автоматизированного вождения/помощи может быть не способна обеспечивать какое-либо управление вождением (например, рулевым управлением, ускорением или торможением), но может обеспечивать уведомления и оповещения для помощи водителю-человеку в безопасном вождении. Система 102 автоматизированного вождения/помощи может включать в себя компонент 104 оградительного столбика, который использует нейронную сеть или другую модель или алгоритм для определения того, что имеется устройство для приема оградительного столбика, и может также определять местоположение, высоту или другую информацию об устройстве для приема оградительного столбика. В одном варианте выполнения система 102 автоматизированного вождения/помощи может определять маневр движения или путь движения для избежания или уменьшения повреждения транспортного средства, которое может возникать в результате проезда над или вблизи устройств для приема оградительных столбиков.
[0019] Система 100 управления транспортным средством также включает в себя одну или более систем/устройств датчиков для обнаружения наличия находящихся поблизости объектов или определения местоположения основного транспортного средства (например, транспортного средства, которое включает в себя систему 100 управления транспортным средством). Например, система 100 управления транспортным средством может включать в себя радарные системы 106, одну или более лидарных систем 108, одну или более систем 110 камеры, систему 112 глобального позиционирования (GPS) и/или ультразвуковые системы 114. Система 100 управления транспортным средством может включать в себя хранилище 116 данных для хранения релевантных или полезных данных для навигации и безопасности, таких как картографические данные, история вождения или другие данные. Система 100 управления транспортным средством также может включать в себя приемопередатчик 118 для беспроводной связи с мобильной или беспроводной сетью, другими транспортными средствами, инфраструктурой или любой другой системой связи.
[0020] Система 100 управления транспортным средством может включать в себя приводы 120 управления транспортным средством для управления различными аспектами вождения транспортного средства, такие как электромоторы, переключатели или другие приводы для управления торможением, ускорением, рулевым управлением или т.п. Система 100 управления транспортным средством также может включать в себя один или более дисплеев 122, динамиков 124 или других устройств так, что могут быть обеспечены уведомления для водителя-человека или пассажира. Дисплей 122 может включать в себя дисплей на лобовом стекле, дисплей или индикатор на передней панели, экран дисплея или любой другой визуальный индикатор, который может быть виден водителю или пассажиру транспортного средства. Динамики 124 могут включать в себя один или более динамиков звуковой системы транспортного средства или могут включать в себя динамик, предназначенный для уведомления водителя.
[0021] Будет принято во внимание, что вариант выполнения на Фиг. 1 представлен только в качестве примера. Другие варианты выполнения могут включать в себя меньшее количество или дополнительные компоненты без отклонения от объема раскрытия. Дополнительно, проиллюстрированные компоненты могут быть скомбинированы или включены в другие компоненты без ограничения.
[0022] В одном варианте выполнения система 102 автоматизированного вождения/помощи выполнена с возможностью управления вождением или навигацией основного транспортного средства. Например, система 102 автоматизированного вождения/помощи может управлять приводами 120 управления транспортным средством для прохождения пути по дороге, парковочной площадке, подъездному пути или другому местоположению. Например, система 102 автоматизированного вождения/помощи может определять путь на основе информации или данных восприятия, обеспеченных любым из компонентов 106-118. Системы/устройства 106-110 и 114 датчиков могут быть использованы для получения данных датчиков в реальном времени так, что система 102 автоматизированного вождения/помощи может помогать водителю или осуществлять вождение транспортного средства в реальном времени. Система 102 автоматизированного вождения/помощи может осуществлять алгоритм или использовать модель, такую как глубокая нейронная сеть, для обработки данных датчиков и идентификации наличия, местоположения и/или высоты устройства для приема оградительного столбика.
[0023] Теперь со ссылкой на Фиг. 2 проиллюстрирован снимок или изображение 200 множества оградительных столбиков 202. Оградительные столбики 202 показаны распределенными поперек проезжей части. Оградительные столбики 202 могут быть использованы для ограничения дорожного движения по проезжей части, например, чтобы позволять пешеходам безопасно переходить улицу или перекресток. В одном варианте выполнения оградительные столбики 202 могут быть выборочно удалены или установлены в устройствах 204 для приема оградительных столбиков для обеспечения способности выборочно позволять или перекрывать дорожное движение. Например, оградительные столбики 202 могут быть установлены в устройствах 204 для приема оградительных столбиков во время событий, когда может быть большое количество пешеходов, и желательно перекрывать дорожное движение по проезжей части или через перекресток. Подобным образом, оградительные столбики 202 могут быть удалены, когда желательно, чтобы дорожное движение осуществлялось по проезжей части или через перекресток. Однако даже когда оградительные столбики 202 удалены, устройства 204 для приема должны в общем оставаться в или на проезжей части.
[0024] Фиг. 3 иллюстрирует снимок или изображение 300 проезжей части с устройствами 302 для приема оградительных столбиков, где оградительные столбики (такие как оградительные столбики 202) были удалены. Из-за отсутствия оградительных столбиков транспортному средству 304 может быть позволено проезжать по проезжей части. Однако устройства 302 для приема оградительных столбиков иногда продолжаются на некоторую высоту над проезжей частью и могут представлять риск повреждения участков транспортного средства, уменьшения комфорта водителя или пассажира или иного прерывания вождения транспортного средства 304. В одном варианте выполнения компонент 104 оградительного столбика (например, в транспортном средстве 304) может обнаруживать и определять местоположение устройств 302 для приема оградительных столбиков и определять маневр движения или путь движения для избежания вызывания повреждения транспортного средства 304. Компонент 104 оградительного столбика может определять путь, который включает в себя избежание удара об устройства 302 для приема оградительных столбиков. В одном варианте выполнения компонент 104 оградительного столбика может определять путь, который заставляет одну или более шин ударяться об устройства для приема оградительных столбиков протектором одной или более шин. Например, устройства 302 для приема оградительных столбиков могут иметь острые металлические края, которые могут особенно наносить повреждения боковинам шин транспортного средства. В одном варианте выполнения компонент 104 оградительного столбика может определять, что устройства 302 для приема оградительных столбиков продолжаются на высоту, достаточную для повреждения ходовой части или другой части транспортного средства 304, и может заставлять транспортное средство останавливаться до удара об устройство 302 для приема оградительного столбика.
[0025] Фиг. 4 представляет собой схематическое изображение 400 вида сверху, иллюстрирующее определение пути движения, который обеспечивает запас безопасности между шинами транспортного средства и какими-либо устройствами для приема оградительных столбиков, согласно одному варианту выполнения. Изображение 400 показывает транспортное средство 402, имеющее первоначальную траекторию, обозначенную пунктирными линиями 412. Множество устройств 404 для приема оградительных столбиков расположены впереди транспортного средства 402. В одном варианте выполнения компонент 104 оградительного столбика транспортного средства 402 может обнаруживать устройства 404 для приема оградительных столбиков. Компонент 104 оградительного столбика может определять местоположение, высоту, размер или т.п. устройств 404 для приема оградительных столбиков.
[0026] В одном варианте выполнения компонент 104 оградительного столбика идентифицирует область 406 запаса безопасности вокруг одного или более из устройств 404 для приема оградительных столбиков, которую следует избегать шинам транспортного средства 402. Области 406 запаса безопасности могут включать в себя круги с центром в устройствах 404 для приема оградительных столбиков, имеющие радиус запаса безопасности. Запас безопасности может быть заранее определен, например, на основе высоты самого низкого нешинного участка транспортного средства. В одном варианте выполнения запас безопасности может быть определен на основе высоты устройств 404 для приема оградительных столбиков. Компонент 104 оградительного столбика может вычислять измененную траекторию на основе текущего местоположения транспортного средства 402 и областей 406 запаса безопасности. В одном варианте выполнения компонент 104 оградительного столбика может определять касательную линию 408, которая является касательной к области 406 запаса безопасности и пересекается с текущей траекторией шины. Угол 410 между первоначальной траекторией (линия 412) и касательной линией 408 может быть вычислен для определения требуемого изменения курса для того, чтобы избегать области (областей) 406 запаса безопасности. В одном варианте выполнения, если угол 410 является слишком большим для выполнения при текущей быстроте транспортного средства, компонент 104 оградительного столбика может замедлять транспортное средство 402, останавливать транспортное средство 402 или заставлять транспортное средство 402 ударяться об устройства 404 для приема оградительных столбиков участком протектора одной или более шин. Компонент 104 оградительного столбика может выбирать маневр на основе самого безопасного или доступного маневра на основе текущей среды движения (например, скорости, находящихся поблизости объектов или автомобилей или т.п.).
[0027] Фиг. 5 представляет собой схематическое изображение, иллюстрирующее способ 500 вычисления изменения курса согласно одному варианту выполнения. Способ 500 может быть выполнен компонентом 104 оградительного столбика и/или системой 100 автоматизированного вождения/помощи.
[0028] Принимают данные 502 восприятия, и система идентифицирует и определяет местоположение одного или более устройств 504 для приема оградительных столбиков в блоке 504. На основе местоположения устройств для приема оградительных столбиков система идентифицирует область, Ra, для избежания, в блоке 506. Например, область Ra может включать в себя круг с центром в устройстве для приема оградительного столбика и имеющий радиус, соответствующий запасу безопасности для основного транспортного средства. Система определяет линию, касательную к области Ra, которая пересекает текущую траекторию транспортного средства, в блоке 508. На основе касательной линии могут вычислять изменение курса, такое как угол между касательной линией и текущей траекторией. Затем транспортное средство может выполнять маневр для изменения курса на определенную величину для избежания повреждения от устройств для приема оградительных столбиков.
[0029] Фиг. 6 представляет собой схематическую блок-схему, иллюстрирующую примерные компоненты компонента 104 оградительного столбика. В изображенном варианте выполнения компонент 104 оградительного столбика включает в себя компонент 602 данных восприятия, компонент 604 местоположения, компонент 606 уведомления, компонент 608 подвески, компонент 610 маневра движения и компонент 612 истории. Компоненты 602-612 представлены только в качестве иллюстрации, и не все из них могут быть включены во всех вариантах выполнения. Фактически некоторые варианты выполнения могут включать в себя только один или любую комбинацию из двух или более из компонентов 602-612. Некоторые из компонентов 602-612 могут быть расположены вне компонента 104 оградительного столбика.
[0030] Компонент 602 данных восприятия выполнен с возможностью приема данных восприятия от одного или более датчиков восприятия транспортного средства. Например, компонент 602 данных восприятия может принимать данные датчиков от камеры, радарной системы, лидарной системы и/или ультразвукового датчика. Данные восприятия могут включать в себя данные об областях в любом направлении от транспортного средства. Например, когда транспортное средство осуществляет навигацию вниз по дороге или в любой другой среде движения, системы датчиков могут периодически обеспечивать данные, относящиеся к среде движения.
[0031] Компонент 604 местоположения выполнен с возможностью обнаружения и/или определения местоположения одного или более устройств для приема оградительных столбиков. В одном варианте выполнения компонент 604 местоположения определяет местоположение одного или более устройств для приема оградительных столбиков в отношении транспортного средства. Например, компонент 604 местоположения может генерировать X, Y и/или Z-координату для одного или более из устройств для приема оградительных столбиков в отношении транспортного средства или системы координат корпуса транспортного средства. Параметр X может обозначать расстояние до передней или задней части переднего бампера, центра или другого местоположения транспортного средства. Параметр Y может обозначать расстояние до левой или правой части боковой панели, центра или другого местоположения транспортного средства. Параметр Z может обозначать высоту устройства для приема оградительного столбика в отношении поверхности движения или шины транспортного средства. В одном варианте выполнения местоположение устройства для приема оградительного столбика может быть определено на основе, по меньшей мере частично, информации от шины CAN транспортного средства. Например, шина CAN может обеспечивать информацию, такую как тангаж транспортного средства, скорость транспортного средства, высота транспортного средства, или любую другую информацию о транспортном средстве, а компонент 604 местоположения может определять местоположение одного или более устройств для приема оградительных столбиков на основе этой информации.
[0032] В одном варианте выполнения компонент 604 местоположения может определять местоположение устройств для приема оградительных столбиков на основе, по меньшей мере частично, истории вождения транспортного средства. Например, история вождения основного транспортного средства или другого транспортного средства может включать в себя информацию о местоположении, высоте или размере устройств для приема оградительных столбиков. Ссылаясь на историю вождения, компонент 604 местоположения может определять, где искать для обнаружения и/или получения точного местоположения для устройств для приема оградительных столбиков в отношении транспортного средства.
[0033] Компонент 606 уведомления выполнен с возможностью обеспечения уведомления о наличии или местоположении одного или более устройств для приема оградительных столбиков для водителя-человека или части системы, которая выполняет принятие решений о движении. В одном варианте выполнения компонент 606 уведомления может обеспечивать уведомление для водителя-человека о том, что имеются устройства для приема оградительных столбиков. Например, уведомление может быть обеспечено на дисплее, таком как дисплей на лобовом стекле, или с использованием динамика для обеспечения голосового или звукового уведомления. Уведомление может указывать местоположение одного или более устройств для приема оградительных столбиков для обращения внимания водителя-человека на местоположение устройств для приема оградительных столбиков. В одном варианте выполнения компонент 606 уведомления предлагает маневр для выполнения. Например, компонент 606 уведомления может предлагать, чтобы водитель замедлялся или останавливался, изменял курс для избежания удара об устройства для приема оградительных столбиков или выполнял какой-либо другой маневр движения.
[0034] В одном варианте выполнения компонент 606 уведомления выполнен с возможностью уведомления системы принятия решений или компонента системы 102 автоматизированного вождения/помощи. Например, компонент 606 уведомления может обеспечивать уведомление для компонента 610 маневра движения, указывающее местоположение устройств для приема оградительных столбиков или предлагаемый маневр для выполнения для избежания устройств для приема оградительных столбиков. Система принятия решений или компонент системы 102 автоматизированного вождения/помощи может в этом случае быть способен использовать местоположение или предлагаемый маневр и учитывать эту информацию при определении пути движения или маневров движения для выполнения транспортным средством.
[0035] Компонент 608 подвески выполнен с возможностью регулировки подвески транспортного средства в ответ на обнаружение и/или определение местоположения устройств для приема оградительных столбиков. Например, компонент 608 подвески может увеличивать высоту подвески на одном или более колесах транспортного средства для избежания удара между участками транспортного средства и устройствами для приема оградительных столбиков. В качестве другого примера, компонент 608 подвески может изменять высоту или жесткость подвески. В одном варианте выполнения компонент 608 подвески может регулировать систему активной или полуактивной подвески для увеличения безопасности, комфорта водителя или т.п. на основе высоты или местоположения устройств для приема оградительных столбиков. Например, устройства для приема оградительных столбиков, которые находятся на одном уровне с поверхностью дороги, могут не требовать регулировки подвески, тогда как устройства для приема оградительных столбиков, которые продолжаются выше пороговой высоты (например, выше 25,4 мм (1 дюйма)), могут требовать большой величины регулировки подвески. В одном варианте выполнения величина регулировки для подвески может быть основана на текущей скорости или быстроте транспортного средства, высоте устройств для приема оградительных столбиков, угле или кривизне поверхности дороги или любой другой информации о транспортном средстве или окружающей среде движения.
[0036] Компонент 610 маневра движения выполнен с возможностью определения или выбора одного или более маневров движения для транспортного средства. В одном варианте выполнения компонент 610 маневра движения может определять маневр движения на основе информации о транспортном средстве, текущих условиях движения, текущей быстроте или другой информации от шины CAN и/или высоте и местоположении устройств для приема оградительных столбиков. В одном варианте выполнения компонент 610 маневра движения определяет маневр движения, который будет избегать или уменьшать повреждение транспортного средства. Например, компонент 610 маневра движения может сравнивать высоту устройства для приема оградительного столбика с известной высотой участка транспортного средства для определения, следует ли транспортному средству останавливаться и не проходить над одним или более устройствами для приема оградительных столбиков, или следует ли транспортному средству маневрировать для избежания прохождения определенных областей транспортного средства над местоположением одного или более устройств для приема оградительных столбиков. В одном варианте выполнения компонент 610 маневра движения может выбирать или идентифицировать маневры движения, которые могут быть выполнены, для следования по безопасному пути движения через или вокруг устройств для приема оградительных столбиков.
[0037] В одном варианте выполнения компонент 610 маневра движения определяет изменение курса для текущего или будущего положения транспортного средства для избежания удара или повреждения от устройств для приема оградительных столбиков. Например, компонент 610 маневра движения может идентифицировать одну или более областей для избежания и может затем идентифицировать изменение курса для избежания этих областей. В одном варианте выполнения компонент маневра движения определяет запас безопасности для избежания устройств для приема оградительных столбиков. В одном варианте выполнения запас безопасности может быть основан на конкретном транспортном средстве, конкретной высоте устройства для приема оградительного столбика и/или одном или более условиях движения. На основе запаса безопасности компонент 610 маневра движения может идентифицировать области запаса безопасности с центром в каждом устройстве для приема оградительного столбика, которые транспортному средству следует избегать. В одном варианте выполнения области запаса безопасности представляют собой круглые области, окружающие каждое обнаруженное устройство для приема оградительного столбика.
[0038] В одном варианте выполнения компонент 610 маневра движения вычисляет угол между текущим курсом транспортного средства (например, осью X транспортного средства) и линией, касательной к одной или более областям безопасности, которая пересекается с колесом, осью или центральной точкой транспортного средства. Компонент 610 маневра движения может затем использовать вычисленный угол в качестве желаемого изменения курса и может определять маневр движения, такой как поворот или замедление транспортного средства, для выполнения желаемого изменения курса. После выполнения желаемого изменения курса каждое колесо транспортного средства может избегать области запаса безопасности, чтобы позволять транспортному средству безопасно проходить над или вокруг устройств для приема оградительных столбиков. В одном варианте выполнения компонент 610 маневра движения может приоритизировать изменения курса, которые заставляют транспортное средство сворачивать с параллельной или встречной полосы. Например, компонент 610 маневра движения может заставлять транспортное средство поворачивать в сторону, где расположена обочина дороги, или на полосу для поворота при условии, что отсутствует риск съезда с проезжей части или удара об объекты, расположенные на обочине или полосе для поворота.
[0039] В одном варианте выполнения компонент 610 маневра движения выбирает маневр движения, который заставляет одну или более шин ударяться об оградительные столбики с использованием участка протектора. Например, если области безопасности устройств для приема оградительных столбиков невозможно избежать, может быть безопаснее, если протекторы шин ударятся об устройства для приема оградительных столбиков. Удар об устройства для приема оградительных столбиков участком протектора может ограничивать риск удара устройствами для приема оградительных столбиков боковин или ходовой части транспортного средства.
[0040] Компонент 612 истории выполнен с возможностью записи информации об устройствах для приема оградительных столбиков в историю вождения. Например, компонент 612 истории может записывать местоположение, высоту или другую информацию об устройствах для приема оградительных столбиков (или оградительных столбиках) в историю вождения в хранилище 116 данных на Фиг. 1. В одном варианте выполнения компонент 612 истории может записывать информацию в историю вождения при обнаружении или при проезде над или избежании устройств для приема оградительных столбиков. Например, компонент 612 истории может ждать до тех пор, пока транспортное средство не пройдет над или вокруг устройств для приема оградительных столбиков, для записи информации об устройствах для приема оградительных столбиков в историю вождения. Например, более точная или полная информация об устройствах для приема оградительных столбиков может быть получена, когда транспортное средство приближается, проходит над или вокруг и/или покидает местоположение устройств для приема оградительных столбиков. Эта точная информация может затем быть записана в историю вождения так, что транспортное средство (или другие транспортные средства) может иметь высокий уровень детализации об устройствах для приема оградительных столбиков и знать, как лучше всего безопасно маневрировать вокруг или над устройствами для приема оградительных столбиков. Например, относительные положения, местоположения, высоты и другая информация могут быть легко доступны даже до того, как транспортное средство первоначально обнаруживает устройства для приема оградительных столбиков, используя его собственные данные восприятия. В одном варианте выполнения компонент 612 истории может записывать одно или более из местоположения одного или более устройств для приема оградительных столбиков, высоты по меньшей мере одного из одного или более устройств для приема оградительных столбиков, пути, проезжаемого транспортным средством в отношении одного или более устройств для приема оградительных столбиков, величины силы, испытываемой системами подвески транспортного средства, когда транспортное средство проходит над устройствами для приема оградительных столбиков, или любую другую информацию.
[0041] Теперь со ссылкой на Фиг. 7 проиллюстрировано схематическое изображение схемы последовательности операций способа 700 обнаружения устройств для приема оградительных столбиков. Способ 700 может быть выполнен компонентом оградительного столбика или системой автоматизированного вождения/помощи, например, компонентом 104 оградительного столбика на Фиг. 1 или 6 или системой 102 автоматизированного вождения/помощи на Фиг. 1.
[0042] Способ 700 начинается, и компонент 602 данных восприятия принимает данные восприятия от одного или более датчиков восприятия транспортного средства на этапе 702. Компонент 604 местоположения определяет, на основе данных восприятия, местоположение одного или более устройств для приема оградительных столбиков в отношении корпуса транспортного средства на этапе 704. Например, компонент 604 местоположения может использовать нейронную сеть или алгоритм распознавания объекта для обнаружения или идентификации устройств для приема оградительных столбиков на изображении или другом кадре данных датчиков. В одном варианте выполнения компонент 604 местоположения определяет местоположение устройств для приема оградительных столбиков по меньшей мере частично на основе истории вождения. На этапе 706 компонент 606 уведомления обеспечивает указание местоположения одного или более устройств для приема оградительных столбиков для одного или более из водителя и компонента решения о маневре движения. Например, уведомление могут обеспечивать на дисплее для водителя. В качестве другого примера, уведомление могут обеспечивать для компонента решения о маневре движения, который является частью системы 102 автоматизированного вождения/помощи или компонента 610 маневра движения. В одном варианте выполнения компонент решения о маневре движения может использовать местоположение или другую информацию об устройствах для приема оградительных столбиков в матрице решений для того, чтобы решать, какие маневры, если таковые имеются, следует выполнять транспортному средству для избежания или уменьшения повреждения транспортного средства.
Примеры
[0043] Следующие примеры относятся к дополнительным вариантам выполнения.
[0044] Пример 1 представляет собой способ, который включает в себя прием данных восприятия от одного или более датчиков восприятия транспортного средства. Способ включает в себя определение, на основе данных восприятия, местоположения одного или более устройств для приема оградительных столбиков в отношении корпуса транспортного средства. Способ дополнительно включает в себя обеспечение указания местоположения одного или более устройств для приема оградительных столбиков для одного или более из водителя и компонента решения о маневре движения.
[0045] В Примере 2 способ Примера 1 дополнительно включает в себя определение местоположения в отношении корпуса на основе информации от шины CAN транспортного средства.
[0046] В Примере 3 определение местоположения в любом из Примеров 1-2 включает в себя определение, дополнительно основанное на истории вождения транспортного средства.
[0047] В Примере 4 один или более датчиков восприятия в любом из Примеров 1-3 включают в себя два или более из камеры, радарного датчика, лидарного датчика, радарного датчика и ультразвукового датчика.
[0048] В Примере 5 способ любого из Примеров 1-4 дополнительно включает в себя определение высоты устройства для приема оградительного столбика на основе данных восприятия.
[0049] В Примере 6 способ любого из Примеров 1-5 дополнительно включает в себя определение маневра движения на основе местоположения одного или более устройств для приема оградительных столбиков.
[0050] В Примере 7 способ Примера 6 дополнительно включает в себя определение запаса безопасности для шин транспортного средства в отношении одного или более устройств для приема оградительных столбиков. Определение маневра движения включает в себя определение маневра движения для избежания движения шины транспортного средства в пределах запаса безопасности одного или более устройств для приема оградительных столбиков.
[0051] В Примере 8 способ любого из Примеров 6-7 включает в себя определение маневра движения, который включает в себя проезд над устройством для приема оградительного столбика из одного или более устройств для приема оградительных столбиков с использованием участка протектора шины транспортного средства.
[0052] В Примере 9 способ любого из Примеров 1-8 дополнительно включает в себя регулировку активной подвески транспортного средства на основе наличия одного или более устройств для приема оградительных столбиков.
[0053] В Примере 10 способ любого из Примеров 1-9 дополнительно включает в себя записывание информации об устройстве для приема оградительного столбика в историю вождения.
[0054] Пример 11 представляет собой систему, которая включает в себя компонент данных восприятия, компонент местоположения и компонент маневра движения. Компонент данных восприятия выполнен с возможностью приема данных восприятия от одного или более датчиков восприятия транспортного средства. Компонент местоположения выполнен с возможностью определения, на основе данных восприятия, местоположения одного или более устройств для приема оградительных столбиков в отношении корпуса транспортного средства. Компонент маневра движения выполнен с возможностью определения маневра движения для избежания или уменьшения повреждения транспортного средства на основе местоположения одного или более устройств для приема оградительных столбиков.
[0055] В Примере 12 компонент маневра движения Примера 11 дополнительно выполнен с возможностью определения запаса безопасности для шин транспортного средства в отношении одного или более устройств для приема оградительных столбиков, причем компонент маневра движения выполнен с возможностью выбора маневра движения, чтобы заставлять каждую шину транспортного средства либо избегать попадания в пределы запаса безопасности одного или более устройств для приема оградительных столбиков, либо ударяться об устройство для приема оградительного столбика из одного или более устройств для приема оградительных столбиков участком протектора.
[0056] В Примере 13 система любого из Примеров 11-12 дополнительно включает в себя компонент подвески, выполненный с возможностью регулировки подвески транспортного средства на основе наличия одного или более устройств для приема оградительных столбиков, причем регулировка подвески транспортного средства включает в себя одну или более из регулировки высоты участка транспортного средства и регулировки жесткости подвески участка транспортного средства.
[0057] В Примере 14 система любого из Примеров 11-13 дополнительно включает в себя компонент уведомления, выполненный с возможностью обеспечения маневра движения в качестве предложения для водителя транспортного средства и/или обеспечения маневра движения для системы управления транспортным средством транспортного средства для выполнения маневра движения.
[0058] Пример 15 представляет собой считываемые компьютером носители хранения, хранящие инструкции, которые, при исполнении одним или более процессорами, заставляют один или более процессоров принимать данные восприятия от одного или более датчиков восприятия транспортного средства. Инструкции заставляют один или более процессоров определять, на основе данных восприятия, местоположение одного или более устройств для приема оградительных столбиков в отношении корпуса транспортного средства. Инструкции заставляют один или более процессоров обеспечивать указание местоположения одного или более устройств для приема оградительных столбиков для одного или более из водителя и системы автоматизированного вождения.
[0059] В Примере 16 инструкции примера 15 дополнительно заставляют один или более процессоров записывать информацию об одном или более устройствах для приема оградительных столбиков в историю вождения. Записанная информация об одном или более устройствах для приема оградительных столбиков включает в себя одно или более из местоположения одного или более устройств для приема оградительных столбиков, высоты по меньшей мере одного из одного или более устройств для приема оградительных столбиков и пути, проезжаемого транспортным средством в отношении одного или более устройств для приема оградительных столбиков.
[0060] В Примере 17 инструкции любого из Примеров 15-16 дополнительно заставляют один или более процессоров определять путь движения на основе местоположения устройства для приема оградительных столбиков для избежания или уменьшения повреждения транспортного средства.
[0061] В Примере 18 инструкции Примера 17 дополнительно заставляют один или более процессоров определять запас безопасности для шин транспортного средства в отношении одного или более устройств для приема оградительных столбиков, причем определение пути движения включает в себя определение пути движения, который заставляет каждую шину транспортного средства либо избегать движения шины транспортного средства в пределах запаса безопасности одного или более устройств для приема оградительных столбиков, либо ударяться об устройство для приема оградительного столбика из одного или более устройств для приема оградительных столбиков участком протектора.
[0062] В Примере 19 инструкции любого из Примеров 17-18 дополнительно заставляют один или более процессоров определять высоту одного или более устройств для приема оградительных столбиков в отношении поверхности дороги и определять путь движения дополнительно на основе высоты.
[0063] В Примере 20 инструкции в любом из Примеров 15-19 дополнительно заставляют один или более процессоров регулировать активную подвеску транспортного средства на основе наличия одного или более устройств для приема оградительных столбиков.
[0064] Пример 21 представляет собой систему или устройство, которое включает в себя средство осуществления способа или реализации системы или аппарата, как в любом из Примеров 1-20.
[0065] В вышеприведенном раскрытии была сделана ссылка на сопровождающие чертежи, которые образуют его часть, и на которых показаны в качестве иллюстрации конкретные варианты осуществления, в которых раскрытие может быть осуществлено на практике. Понятно, что могут быть использованы другие варианты осуществления, и что могут быть выполнены структурные изменения без отклонения от объема настоящего раскрытия. Ссылки в описании на «один вариант выполнения», «вариант выполнения», «примерный вариант выполнения» и т.д. указывают, что описанный вариант выполнения может включать в себя особый признак, структуру или характеристику, но каждый вариант выполнения не обязательно может включать в себя особый признак, структуру или характеристику. Более того, такие фразы не обязательно ссылаются на один и тот же вариант выполнения. Дополнительно, когда особый признак, структура или характеристика описаны в связи с вариантом выполнения, представляется, что это находится в рамках знаний специалиста в области техники для воздействия на такой признак, структуру или характеристику в связи с другими вариантами выполнения, описанными явно или нет.
[0066] В данном контексте «автономное транспортное средство» может представлять собой транспортное средство, которое действует или работает полностью независимо от водителя-человека; или может представлять собой транспортное средство, которое действует или работает независимо от водителя-человека в некоторых примерах, при этом в других примерах водитель-человек может быть способен эксплуатировать транспортное средство; или может представлять собой транспортное средство, которое преимущественно эксплуатируется водителем-человеком, но с помощью системы автоматизированного вождения/помощи.
[0067] Осуществления систем, устройств и способов, раскрытых здесь, могут содержать или использовать компьютер специального назначения или общего назначения, включающий в себя аппаратное обеспечение компьютера, такое как, например, один или более процессоров и системную память, которые рассмотрены здесь. Осуществления в пределах объема настоящего раскрытия также могут включать в себя физические и другие считываемые компьютером носители для переноса или хранения исполняемых компьютером инструкций и/или структур данных. Такие считываемые компьютером носители могут представлять собой любые доступные носители, которые могут быть доступны для компьютерной системы общего назначения или специального назначения. Считываемые компьютером носители, которые хранят исполняемые компьютером инструкции, представляют собой компьютерные носители (устройства) хранения. Считываемые компьютером носители, которые переносят исполняемые компьютером инструкции, представляют собой носители передачи. Таким образом, в качестве примера, а не ограничения, варианты осуществления раскрытия могут содержать по меньшей мере два совершенно различных вида считываемых компьютером носителей: компьютерные носители (устройства) хранения и носители передачи.
[0068] Компьютерные носители (устройства) хранения включают в себя RAM, ROM, EEPROM, CD-ROM, твердотельные накопители («SSDs») (например, на основе RAM), флэш-память, память с фазовым переходом («PCM»), другие типы памяти, другое хранилище на оптическом диске, хранилище на магнитном диске или другие магнитные устройства хранения или любой другой носитель, который может быть использован для хранения желаемых средств программного кода в форме исполняемых компьютером инструкций или структур данных и который может быть доступен для компьютера общего назначения или специального назначения.
[0069] Осуществление устройств, систем и способов, раскрытых здесь, может связываться по компьютерной сети. «Сеть» определена как одна или более линий передачи данных, которые обеспечивают передачу электронных данных между компьютерными системами и/или модулями и/или другими электронными устройствами. Когда информация передается или обеспечивается по сети или другому соединению связи (либо проводному, беспроводному, либо комбинации проводного или беспроводного) для компьютера, компьютер в сущности видит соединение как носитель передачи. Носители передачи могут включать в себя сеть и/или линии передачи данных, которые могут быть использованы для переноса желаемых средств программного кода в форме исполняемых компьютером инструкций или структур данных и которые могут быть доступны для компьютера общего назначения или специального назначения. Комбинации вышеприведенного также должны быть включены в объем считываемых компьютером носителей.
[0070] Исполняемые компьютером инструкции содержат, например, инструкции и данные, которые, при исполнении в процессоре, заставляют компьютер общего назначения, компьютер специального назначения или устройство обработки специального назначения выполнять определенную функцию или группу функций. Исполняемые компьютером инструкции могут представлять собой, например, двоичные файлы, инструкции промежуточного формата, такие как язык ассемблера, или равномерный исходный код. Хотя объект изобретения был описан на языке, характерном для структурных признаков и/или методологических действий, следует понимать, что объект изобретения, определенный в приложенной формуле изобретения, необязательно ограничен описанными признаками или действиями, описанными выше. Точнее, описанные признаки и действия раскрыты в качестве примерных форм осуществления формулы изобретения.
[0071] Специалисты в области техники будут принимать во внимание, что раскрытие может быть осуществлено на практике в сетевых вычислительных средах со многими типами конфигураций компьютерной системы, включающих в себя компьютер в передней панели транспортного средства, персональные компьютеры, настольные компьютеры, переносные компьютеры, процессоры сообщений, карманные устройства, многопроцессорные системы, бытовую электронику на базе микропроцессоров или программируемую бытовую электронику, сетевые персональные компьютеры (PC), миникомпьютеры, большие универсальные компьютеры, мобильные телефоны, PDA, планшеты, пейджеры, маршрутизаторы, переключатели, различные устройства хранения и т.п. Раскрытие также может быть осуществлено на практике в средах распределенных систем, где и локальные, и удаленные компьютерные системы, которые связаны (либо проводными линиями передачи данных, беспроводными линиями передачи данных, либо комбинацией проводных и беспроводных линий передачи данных) по сети, выполняют задачи. В среде распределенной системы программные модули могут находиться и в локальных, и в удаленных запоминающих устройствах.
[0072] Дополнительно, при необходимости функции, описанные здесь, могут быть выполнены в одном или более из: аппаратного обеспечения, программного обеспечения, аппаратно-программного обеспечения, цифровых компонентов или аналоговых компонентов. Например, одна или более специализированных интегральных схем (ASIC) могут быть запрограммирована с возможностью осуществления одной или более из систем и процедур, описанных здесь. Некоторые термины используются на протяжении всего описания и формулы изобретения для ссылки на особые компоненты системы. Как будет принимать во внимание специалист в области техники, компоненты могут быть упомянуты под различными названиями. Этот документ не предназначен для проведения различия между компонентами, которые отличаются названием, но не функцией.
[0073] Следует отметить, что варианты выполнения датчиков, рассмотренных выше, могут содержать компьютерное аппаратное обеспечение, программное обеспечение, аппаратно-программное обеспечение или их любую комбинацию для выполнения по меньшей мере части их функций. Например, датчик может включать в себя компьютерный код, выполненный с возможностью исполнения в одном или более процессорах, и может включать в себя аппаратную логику/электрическую схему, управляемую компьютерным кодом. Эти примерные устройства обеспечены здесь в целях иллюстрации и не предназначены быть ограничивающими. Варианты выполнения настоящего раскрытия могут быть осуществлены в дополнительных типах устройств, которые будут известны специалистам в соответствующей области (областях) техники.
[0074] По меньшей мере некоторые варианты выполнения раскрытия были направлены на компьютерные программные продукты, содержащие такую логику (например, в форме программного обеспечения), хранящуюся в любом используемом компьютером носителе. Такое программное обеспечение, при исполнении в одном или более устройствах обработки данных, заставляет устройство работать так, как описано в данном документе.
[0075] Несмотря на то, что различные варианты выполнения настоящего раскрытия были описаны выше, следует понимать, что они были представлены только в качестве примера, а не ограничения. Специалистам в соответствующей области техники будет ясно, что в них могут быть выполнены различные изменения по форме и детали без отклонения от замысла и объема раскрытия. Таким образом, широта и объем настоящего раскрытия не должны быть ограничены какими-либо из вышеописанных примерных вариантов выполнения, но должны быть определены только в соответствии со следующей формулой изобретения и ее эквивалентами. Вышеприведенное описание было представлено в целях иллюстрации и описания. Оно не предназначено быть исчерпывающим или ограничивать раскрытие раскрытой точной формой. Возможны много преобразований и изменений в свете вышеуказанного замысла. Дополнительно, следует отметить, что любые или все из вышеупомянутых альтернативных вариантов осуществления могут быть использованы в любой желательной комбинации для образования дополнительных смешанных вариантов осуществления раскрытия.
[0076] Дополнительно, хотя конкретные варианты осуществления раскрытия были описаны и проиллюстрированы, раскрытие не должно быть ограничено конкретными формами или расположениями частей, описанными и проиллюстрированными здесь. Объем раскрытия должен быть определен формулой изобретения, приложенной к этому, любыми будущими формулами изобретения, представленными здесь и в других применениях, и их эквивалентами.
Изобретение относится, в общем, к способам, системам и аппаратам для автоматизированного вождения или помощи при вождении и, в частности, к идентификации и определению местоположения и навигации в отношении устройств для приема оградительных столбиков. Система идентификации устройства для приема оградительных столбиков содержит компонент данных восприятия для приема данных восприятия от датчика восприятия транспортного средства (ТС), компонент местоположения для определения местоположения устройства для приема оградительных столбиков в отношении корпуса ТС на основе данных восприятия и компонент маневра движения для определения маневра движения на основе местоположения устройства для приема оградительных столбиков. Местоположение определяется, когда соответствующий оградительный столбик удален из устройства для приема оградительных столбиков. При этом маневр движения заставляет шины ТС ударяться об устройство для приема оградительных столбиков протектором шин так, что боковая стенка шин не наталкивается на устройство для приема оградительных столбиков. Повышается безопасность при эксплуатации ТС. 3 н. и 15 з.п. ф-лы, 7 ил.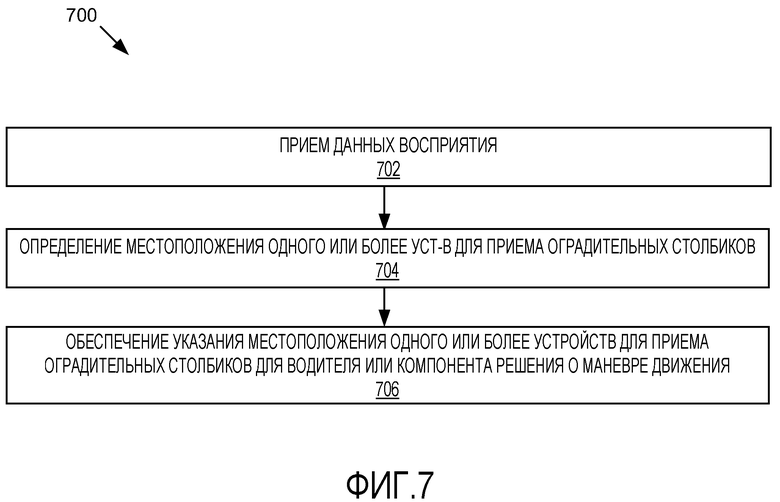
1. Способ идентификации устройства для приема оградительных столбиков, содержащий этапы, на которых:
принимают данные восприятия от датчика восприятия транспортного средства;
определяют, на основе данных восприятия, местоположение устройства для приема оградительных столбиков в отношении корпуса транспортного средства, при этом определение местоположения содержит определение местоположения в течение времени, когда соответствующий оградительный столбик удален из устройства для приема оградительных столбиков; и
определяют маневр движения на основе местоположения устройства для приема оградительных столбиков, при этом маневр движения заставляет одну или более шин транспортного средства ударяться об устройство для приема оградительных столбиков протектором одной или более шин так, что боковая стенка одной или более шин не наталкивается на устройство для приема оградительных столбиков.
2. Способ по п. 1, содержащий также этап, на котором определяют местоположение в отношении корпуса на основе информации от шины локальной сети контроллеров (CAN) транспортного средства.
3. Способ по п. 1, в котором этап, на котором определяют местоположение, содержит определение, дополнительно основанное на истории вождения транспортного средства.
4. Способ по п. 1, в котором датчик восприятия содержат две или более из: камеры, радарного датчика, лазерного датчика обнаружения и измерения дальности (LIDAR) и ультразвукового датчика.
5. Способ по п. 1, содержащий также этап, на котором определяют высоту устройства для приема оградительного столбика на основе данных восприятия.
6. Способ по п. 1, содержащий также этап, на котором обеспечивают маневр движения одному или более из: водителю транспортного средства или системе управления транспортным средством транспортного средства для выполнения маневра движения.
7. Способ по п. 1, содержащий также этап, на котором определяют область запаса безопасности с центром в устройстве для приема оградительных столбиков.
8. Способ по п. 7, в котором определение маневра движения также содержит определение измененной траектории для транспортного средства на основе текущего местоположения транспортного средства и области запаса безопасности так, чтобы одна или более шин транспортного средства не вошла в область запаса безопасности с центром в устройстве для приема оградительных столбиков.
9. Способ по п. 1, содержащий также этап, на котором регулируют активную подвеску транспортного средства на основе наличия устройства для приема оградительных столбиков.
10. Способ по п. 1, содержащий также этап, на котором записывают информацию об устройстве для приема оградительного столбика в историю вождения.
11. Система идентификации устройства для приема оградительных столбиков, содержащая:
компонент данных восприятия, выполненный с возможностью приема данных восприятия от датчика восприятия транспортного средства;
компонент местоположения, выполненный с возможностью определения, на основе данных восприятия, местоположения устройства для приема оградительных столбиков в отношении корпуса транспортного средства, при этом компонент местоположения определяет местоположение в течение времени, когда соответствующий оградительный столбик удален из устройства для приема оградительных столбиков; и
компонент маневра движения, выполненный с возможностью определения маневра движения на основе местоположения устройства для приема оградительных столбиков, при этом маневр движения заставляет одну или более шин транспортного средства ударяться об устройство для приема оградительных столбиков протектором одной или более шин так, что боковая стенка одной или более шин не наталкивается на устройство для приема оградительных столбиков.
12. Система по п. 11, содержащая также компонент подвески, выполненный с возможностью регулировки подвески транспортного средства на основе наличия устройства для приема оградительных столбиков, при этом регулировка подвески транспортного средства содержит одну или более из регулировки высоты участка транспортного средства и регулировки жесткости подвески участка транспортного средства.
13. Система по п. 11, содержащая также компонент уведомления, выполненный с возможностью одного или более из:
обеспечения маневра движения в качестве предложения для водителя транспортного средства или
обеспечения маневра движения для системы управления транспортным средством транспортного средства для выполнения маневра движения.
14. Долговременный считываемый компьютером носитель хранения, хранящий инструкции, которые, при исполнении одним или более процессорами, заставляют один или более процессоров:
принимать данные восприятия от датчика восприятия транспортного средства;
определять, на основе данных восприятия, местоположение устройства для приема оградительных столбиков в отношении корпуса транспортного средства, при этом определение местоположения содержит определение местоположения в течение времени, когда соответствующий оградительный столбик удален из устройства для приема оградительных столбиков;
определять маневр движения на основе местоположения устройства для приема оградительных столбиков, при этом маневр движения заставляет одну или более шин транспортного средства ударяться об устройство для приема оградительных столбиков протектором одной или более шин так, что боковая стенка одной или более шин не наталкивается на устройство для приема оградительных столбиков.
15. Долговременный считываемый компьютером носитель хранения по п. 14, в котором инструкции также заставляют один или более процессоров хранить информацию об устройстве для приема оградительных столбиков в истории вождения, при этом информация об устройстве для приема оградительных столбиков содержит одно или более из:
местоположения устройства для приема оградительных столбиков;
высоты устройства для приема оградительных столбиков или
пути, проезжаемого транспортным средством в отношении устройства для приема оградительных столбиков.
16. Долговременный считываемый компьютером носитель хранения по п. 14, в котором инструкции также заставляют один или более процессоров:
определять область запаса безопасности с центром в устройстве для приема оградительных столбиков и
определять измененную траекторию для транспортного средства на основе текущего местоположения транспортного средства и области запаса безопасности с центром в устройстве для приема оградительных столбиков.
17. Долговременный считываемый компьютером носитель хранения по п. 14, в котором инструкции также заставляют один или более процессоров определять высоту устройства для приема оградительных столбиков в отношении поверхности дороги и определять маневр движения дополнительно на основе высоты.
18. Долговременный считываемый компьютером носитель хранения по п. 14, в котором инструкции также заставляют один или более процессоров регулировать активную подвеску транспортного средства на основе наличия устройства для приема оградительных столбиков.
| Способ изготовления мелкозалегающих переходов | 2021 |
|
RU2757539C1 |
| KR 20130062034 A, 12.06.2013 | |||
| УСТРОЙСТВО КОНТРОЛЯ ДИСТАНЦИЙ АВТОМОБИЛЯ ДО ПРЕПЯТСТВИЙ | 2010 |
|
RU2425765C1 |

